Устройство анализа поверхности и метод анализа упругости воспринимающей поверхности - RU2748878C2
Код документа: RU2748878C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству анализа поверхности и способу определения показателей упругости воспринимающей поверхности, в частности определения показателей, соответствующих множеству направлений на воспринимающей поверхности.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Анализ упругости поверхностей имеет важное значение во многих различных отраслях промышленности и областях техники. В качестве примера любое применение, в котором ткань, текстильный или другой материал используется в технических целях, может получить пользу от способности детально оценивать упругость поверхности материала. Это может потребоваться для определения функциональных технических параметров компонента или для оценки вероятного срока службы или долговечности компонентов или изделий. Примеры включают анализ текстильных материалов, используемых, например, в предметах мебели или одежде, или анализ компонентов, используемых в качестве компонентов для передачи усилия (таких как ремни) в машинах и оборудовании.
Кроме того, одна дополнительная область, в которой анализ поверхности представляет особый интерес, - это область анализа кожи.
Кожа выполняет множество функций, критически важных для тела человека. Они включают регулирование температуры тела и защиту от потери воды. Имеются поддающиеся измерению характеристики кожи, непосредственно связанные с этими функциями, - а именно упругость и твердость. Известно, что на эти характеристики оказывают прямое влияние возрастное старение и фотостарение, а также то, что степень воздействия варьируется для различных зон на теле.
Способность количественно оценивать данные характеристики является важной, поскольку это позволяет охарактеризовать состояние старения кожи человека, что, в свою очередь, может содействовать определению соответствующей и эффективной терапии для лечения кожи для заживления любого повреждения.
Следовательно, средства оценки упругости и твердости кожи являются сферой, представляющей постоянный интерес. В частности, средства определения сопротивления кожи вдавливанию, а также способности кожи к растягиванию представляют большой интерес.
Существуют различные методы и подходы для оценки упругости и твердости кожи в лабораторных условиях. Они включают атомно-силовую микроскопию и электрографию тканей. Несмотря на то, что эти методы и подходы оказались эффективными при получении показателей упругости тканей, они в настоящее время требуют сложного оборудования, которое не подходит для использования в клинических или домашних условиях. Это ограничивает их применимость и требует того, чтобы потенциальные пациенты (или другие пользователи) посещали специализированные лаборатории, укомплектованные подготовленными операторами, для выполнения оценок состояния их кожи. Это просто невозможно реализовать на практике или адаптировать для больших количеств пациентов. Представляют интерес устройства, позволяющие получить показатели упругости кожи в клинических и домашних условиях.
Существуют некоторые устройства, которые в большей степени применимы для не лабораторных условий. Они включают устройство 'Cutometer MPA 580', продаваемое компанией Courage and Khazaca electronic. Это устройство является более практичным, но, тем не менее, остается довольно большой и сложной машиной, которая не пригодна для миниатюризации и встраивания, например, в малогабаритное устройство для терапии и/или измерений. Малогабаритное устройство является гораздо более практичным и полезным и поэтому представляет большой интерес.
Существуют некоторые подходы, которые в большей степени применимы для малогабаритных или миниатюризированных устройств. В частности, эти подходы, как правило, базируются на применении деформирующих воздействий в плоскости или не в плоскости на точку на коже пользователя и измерении соответствующей силы реакции, действующей со стороны кожи или в той же точке, или в другой, пространственно смещенной точке.
Например, в US 2014/0352448 раскрыт пьезоэлектрический пальцевой датчик, способный измерять как модуль Юнга, так и модуль сдвига образца ткани в отдельно взятой одной точке. Пальцевой датчик включает в себя два слоя пьезоэлектрического материала, один из которых выполнен с возможностью деформирования для приложения силы к образцу ткани и другой выполнен с возможностью измерения смещения первого слоя. Сила сопротивления кожи может быть определена посредством мониторинга измеренной величины смещения, и, следовательно, можно оценить упругость кожи в данной точке. Множество этих устройств могут быть прикреплены к коже пользователя для определения показателей упругости в множестве различных отдельных точек.
Несмотря на то, что этот подход является гораздо более практичным, он ограничен получением показателей упругости только в отдельных изолированных точках. Не раскрыты средства для получения показателей упругости, например, на протяженном участке ткани или для получения показателей, соответствующих разным длинам образцов, проходящих в различных направлениях. Данные, связанные с направлениями, в этом случае имеют высокую ценность, поскольку известно, что кожа, в частности, имеет эффекты анизотропии в отношении ее упругости, информация о которых позволила бы значительно более подробно и точно охарактеризовать состояние старения кожи.
В статье Y. Shi и др. (Shy YY и др. An Analytic Model for Skin Modulus Measurement Via Conformal Piezoelectric Systems ASME. J. Appl. Mech. 2015; 82(9)) рассмотрена аналитическая модель для определения модуля Юнга образца кожи на основе деформирования кожи в первой точке и измерения результирующего давления или результирующей силы, приложенного (-й) со стороны кожи во второй, пространственно смещенной точке. В данном подходе используется линейное расположение трех пьезоэлектрических измерительных лент, наложенных на слой кожи, одна из которых электрически возбуждается для сужения, посредством чего вызывается обусловленное этим расширение остальных двух лент в результате обусловленной этим деформации кожной ткани, подвергнутой воздействию. Величину этого расширения измеряют, и посредством этого вычисляют модуль Юнга.
Несмотря на то, что этот подход обеспечивает возможность измерения упругости кожи на протяженном участке ткани (проходящем между различными лентами), его практическая применимость сильно ограничена. В частности, он не обеспечивает никаких средств получения множества показателей упругости, соответствующих разным участкам или зонам кожи. Несмотря на то, что измерения с использованием датчиков выполняются на множестве расстояний от стягивающейся ленты, в модели предполагается постоянная и общая упругость в каждом месте расположения датчика. Она не создает возможности обнаружения и измерения изменений упругости, возникающих в различных местах на линии.
Как и в предыдущем случае, модель также не обеспечивает никаких средств получения данных по многим направлениям. Модель полностью базируется на исключительно линейном расположении лент и не дает никакого указания на то, как данный подход может быть расширен для обеспечения показателей по многим направлениям.
В завершение, существует дополнительное устройство, изготавливаемое компанией Courage and Khazaca electronic, которое предназначено для определения направления коллагена и волокнистых белков в коже. Оно базируется на измерении длительности периода колебаний при проходе акустической ударной волны через кожу. Устройство содержит один актуатор, выполненный с возможностью генерирования ударной волны, и один датчик, выполненный с возможностью обнаружения вступления ударной волны. Устройство может быть повернуто вручную для обеспечения возможности анализа направленности коллагена и волокнистого белка эластина в ряде различных направлений в коже.
Устройство имеет ограниченную применимость при измерении упругости кожи самой по себе и, как и в предыдущем случае, обеспечивает возможность определения характеристик кожи только на одном направленном участке кожи в любой отдельно взятый момент времени.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, в данной области техники существует общая потребность в усовершенствованных устройствах для анализа упругости поверхности, сохраняющих малый форм-фактор и простых в эксплуатации, но способных обеспечить большее количество и больший диапазон различных данных измерений простым образом, чтобы посредством этого создать возможность более подробного и глубокого анализа отдельно взятой поверхности, представляющей интерес.
Задача изобретения состоит по меньшей мере в частичном удовлетворении данной потребности. Эта задача решается посредством изобретения, определяемого независимыми пунктами формулы изобретения. В зависимых пунктах формулы изобретения определены предпочтительные варианты осуществления.
Согласно аспекту изобретения, предложено устройство, предназначенное для применения к воспринимающей поверхности для анализа упругости указанной воспринимающей поверхности на множестве различных линейных участков указанной поверхности, при этом устройство содержит:
держатель, имеющий поверхность;
конструкцию из трех или более элементов взаимодействия с поверхностью, установленных на поверхности держателя, при этом каждый элемент выполнен с возможностью осуществления только одной из функций оказания воздействия или измерения давления в любой отдельно взятый момент времени, и элементы отделены в пространстве друг от друга и распределены в двух измерениях на поверхности держателя, и при этом конструкция включает в себя по меньшей мере первый элемент взаимодействия с поверхностью, выполненный с возможностью осуществления функции оказания воздействия, и по меньшей мере второй элемент взаимодействия с поверхностью, выполненный с возможностью выполнения функции измерения давления; и
контроллер, функционально соединенный с элементами взаимодействия с поверхностью и выполненный с возможностью:
управления первым элементом взаимодействия с поверхностью для вызывания деформации в воспринимающей поверхности в первой точке контакта,
управления вторым элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности во второй, пространственно отделенной точке контакта, для обеспечения возможности определения показателя упругости воспринимающей поверхности между данными первой и второй точками, и
управления одним или более дополнительными элементами взаимодействия с поверхностью или для вызывания деформации в воспринимающей поверхности, или для измерения давления и/или силы, действующих со стороны воспринимающей поверхности в дополнительных одной или более точках контакта, чтобы посредством этого обеспечить возможность определения показателя упругости между каждой из указанных дополнительных одной или более точек и или второй, или первой точкой контакта.
Таким образом, подобное устройство может быть названо устройством анализа поверхности на основе его способности анализировать упругость указанной воспринимающей поверхности на множестве различных линейных участков указанной поверхности.
Следовательно, варианты осуществления изобретения базируются на наложении многоэлементной упорядоченной совокупности (или конструкции из) датчиков и актуаторов на целевую зону заданной воспринимающей поверхности. Каждый актуатор выполнен с возможностью приложения силы к воспринимающей поверхности для вызывания некоторой деформации в отдельно взятой точке или в некоторой небольшой отдельно взятой зоне. Каждый датчик выполнен с возможностью измерения силы или давления, приложенной (-го) к нему со стороны воспринимающей поверхности в другой отдельно взятой точке. При мониторинге или определении иным образом изменения измеренной силы или измеренного давления в отдельно взятой точке измерения после вызывания деформации отдельно взятым актуатором в отдельной точке может быть получен показатель жесткости поверхности между актуатором и датчиком. В частности, чем более жестким является подвергающийся воздействию участок воспринимающей поверхности, тем больше будет измеренное изменение давления или силы в датчике.
При приведении в действие различных комбинаций актуаторов и датчиков в данной упорядоченной совокупности может быть получен показатель жесткости кожи (или другой целевой воспринимающей поверхности) на множестве различных линейных участков или частей кожи. Это создает возможность более глубокого и более подробного анализа упругости кожи. В некоторых случаях множество результатов измерений могут быть получены одновременно. В других случаях множество результатов измерений могут быть получены по отдельности или последовательно.
Конструкция может быть спроектирована или конфигурирована так, чтобы она соответствовала любой заданной конфигурации или схеме расположения. Чем больше или чем сложнее предусмотренная конфигурация, тем шире разнообразие и диапазон различных результатов измерений, которые могут быть получены на целевой зоне воспринимающей поверхности.
Кроме того, конструкция из элементов взаимодействия с поверхностью имеет протяженность в плане в двух направлениях и, следовательно, включает в себя актуаторы и датчики, смещенные друг от друга под самыми разными углами. При избирательном приведении в действие их различных комбинаций могут быть получены данные, относящиеся к упругости вдоль множества различных направлений. Как рассмотрено выше, данные, относящиеся к многим направлениям, имеют большую ценность, поскольку создается возможность анализа эффектов анизотропии. Они могут обеспечить более подробные сведения о текущем состоянии кожи человека.
В самом простом случае конструкция содержит по меньшей мере три элемента взаимодействия с поверхностью которые включают по меньшей мере один элемент, способный выполнять каждую из функций оказания воздействия и измерения. По меньшей мере, один дополнительный элемент взаимодействия с поверхностью может быть выполнен с возможностью выполнения или оказания воздействия, или измерения. Контроллер выполнен с возможностью управления данным по меньшей мере одним дополнительным элементом одновременно с управлением одним или обоими из первого и второго элементов в зависимости от того, какую функцию (оказания воздействия или измерения) он может выполнять. Если он функционирует в качестве датчика, он может быть приведен в действие для измерения давления и/или силы одновременно с приведением в действие/ возбуждением первого (воздействующего) элемента. Если он функционирует в качестве воздействующего элемента/актуатора, управление им может осуществляться для его функционирования одновременно со вторым (чувствительным) элементом. В альтернативном варианте, в котором предусмотрено более трех элементов, каждый дополнительный элемент может быть приведен в действие одновременно с по меньшей мере одним из остальных дополнительных элементов, при этом другой дополнительный элемент выполнен с возможностью выполнения «противоположной» функции (из оказания воздействия и измерения).
В любом случае один элемент из конструкции (или первый, или второй) фактически используется совместно с одним из по меньшей мере двух других элементов для выполнения анализа упругости. Это позволяет получить два отдельных показателя упругости (для различных интервалов, частей или участков кожи) при использовании только трех элементов (а не, например, двух специально предусмотренных пар из двух элементов). Это обеспечивает существенные преимущества с точки зрения эффективности использования, а также минимизации форм-фактора.
В более сложных примерах могут быть предусмотрены более трех элементов взаимодействия с поверхностью и расположенных в соответствии с любой заданной схемой или конфигурацией. Однако в каждом случае по меньшей мере один элемент из конструкции применяется для обеспечения способности к выполнению некоторого множества измерений: по меньшей мере, один элемент обеспечивает измерения в сочетании с множеством остальных элементов. Таким образом, изобретение обеспечивает эффективное совместное использование ресурсов, «взаимодействующих» с поверхностью и максимизацию плотности данных, которые могут быть получены на заданной площади поверхности образца.
Воспринимающая поверхность может представлять собой зону кожи, хотя настоящее изобретение не ограничено применением для кожи. Варианты осуществления могут быть эффективно применены для анализа любой гибкой или податливой зоны материала. Разъяснения, представленные в нижеприведенных описаниях в отношении использования для кожи, следует интерпретировать только как иллюстративные, и идея, описанная в каждом случае, может применяться в равной степени для любой другой гибкой воспринимающей поверхности.
Варианты осуществления включают конструкцию из элементов взаимодействия с поверхностью при этом каждый элемент функционирует для выполнения заданного измерения или в качестве датчика, или в качестве актуатора. Некоторые элементы могут иметь фиксированную функцию и функционировать всегда в качестве датчика или всегда в качестве актуатора. Некоторые элементы могут быть выполнены с возможностью функционирования в любом из двух режимов. Однако управление ни одним из них не осуществляется так, чтобы он функционировал одновременно как в качестве датчика, так и в качестве актуатора.
При выполнении требования, заключающегося в том, что каждый элемент взаимодействия с поверхностью выполняет в одно и то же время или только оказание воздействия, или только измерение, легче обеспечивается возможность измерения упругости на проходящих в боковом направлении участках воспринимающей поверхности между разными точками. Напротив, одновременное оказание воздействия отдельно взятым чувствительным элементом привело бы к существенному искажению любого результата измерения упругости в боковом направлении. Локальная деформация, вызываемая этим воздействием в чувствительном элементе, привела бы к почти полному «подавлению» выполняемых измерений силы, затрудняя или делая невозможным точное измерение любой упругости в боковом направлении между датчиком и актуатором, смещенным в боковом направлении.
Каждая пара из актуатора и датчика позволяет определить показатель упругости воспринимающей поверхности между элементами из данной пары. Предусмотрено, что выражение «показатель упругости» относится в широком смысле, например, к любой величине, тенденции или взаимосвязи, которая указывает на или характеризует упругость воспринимающей поверхности. Под упругостью в общем случае понимается жесткость, твердость, плотность или податливость. Этот термин не предназначен для ограничения изобретения каким-либо конкретным научным или теоретическим определением упругости (изобретение не ограничено, например, обеспечением возможности измерения модуля Юнга воспринимающей поверхности, хотя это может быть возможным при использовании некоторых вариантов осуществления).
Варианты осуществления изобретения направлены на использование многоэлементной конструкции из актуаторов и датчиков для получения множества различных показателей упругости, соответствующих разным зонам, линейным участкам и направлениям на воспринимающей поверхности и при необходимости соответствующих разным видам показателей упругости (например, упругости при сдвиге или упругости при сжатии). Термин «линейный участок» относится к любому линейному интервалу вдоль поверхности, проходящему между двумя соответствующими точками на поверхности. Он относится к участку или отрезку, или расстоянию на коже между двумя точками. В этой связи два различных линейных участка могут перекрываться, но различаться, например, или по их направлению, или по их конкретной длине.
В каждом варианте осуществления используется многоэлементная совокупность из по меньшей мере трех элементов взаимодействия с кожей, для получения по меньшей мере двух показателей упругости. В некоторых случаях эти два показателя могут быть получены одновременно, в других случаях они могут быть получены по отдельности или последовательно.
В соответствии, например, с по меньшей мере одним множеством вариантов осуществления контроллер может быть выполнен с возможностью избирательного управления множеством различных пар элементов взаимодействия с поверхностью при этом каждая пара включает в себя один элемент, выполненный с возможностью оказания воздействия, и один элемент, выполненный с возможностью выполнения измерения давления и/или силы, для независимого или одновременного выполнения соответствующих пар функций деформирования поверхности и измерения давления/силы, чтобы посредством этого обеспечить возможность множества независимых или одновременных измерений упругости на множестве различных линейных участков указанной воспринимающей поверхности.
Каждая пара в данной конструкции состоит из одного актуатора и одного датчика, разделенных отличным от других, конкретным линейным участком воспринимающей поверхности. Каждая пара выполнена с возможностью получения отдельного показателя упругости поверхности, соответствующего конкретному линейному участку воспринимающей поверхности, проходящему между элементами из данной пары.
Пары могут перекрываться так, что один элемент будет участвовать в выполнении измерений для множества различных линейных участков поверхности. В случае, когда совместно используемый элемент представляет собой актуатор, множество показателей могут быть получены таким образом одновременно. В случае, когда актуатор представляет собой датчик, каждое отдельное измерение может быть выполнено последовательно.
В соответствии с дополнительным множеством иллюстративных вариантов осуществления
множество элементов взаимодействия с поверхностью могут быть выполнены с возможностью выполнения функции оказания воздействия, и при этом контроллер выполнен с возможностью управления указанным множеством элементов для вызывания соответствующих деформаций в воспринимающей поверхности в соответствующем множестве точек контакта и с возможностью управления одним дополнительным элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности, в дополнительной, пространственно смещенной точке контакта; и/или
множество элементов взаимодействия с поверхностью могут быть выполнены с возможностью выполнения функции измерения давления и/или силы, и при этом контроллер выполнен с возможностью управления одним дополнительным элементом взаимодействия с поверхностью для вызывания деформации в воспринимающей поверхности в одной точке контакта и с возможностью управления указанным множеством элементов взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности, в дополнительном множестве точек контакта.
В частности, в любом из двух случаев каждый из данного множества элементов взаимодействия с поверхностью может быть расположен рядом с указанным одним элементом взаимодействия с поверхностью (то есть без каких-либо дополнительных элементов, расположенных между ними). Может быть предусмотрен, например, один центральный актуатор, окруженный множеством датчиков, или один центральный датчик, окруженный множеством актуаторов. В альтернативном варианте множество элементов могут быть выставлены линейно, и один обратный элемент может быть, например, расположен в месте, смещенном в боковом направлении от данной линии.
Следовательно, в каждом из данных иллюстративных вариантов осуществления предусмотрено многоэлементное множество актуаторов в сочетании с одним датчиком или многоэлементное множество датчиков в сочетании с одним актуатором. Между данным одним предусмотренным элементом и каждым из множества обратных элементов имеется отличный от других, определенный линейный участок воспринимающей поверхности. Если каждый из данного множества элементов расположен рядом с данным одним элементом (то есть без каких-либо элементов, расположенных между ними), то каждый из данных различных линейных участков также проходит в отличном от других, угловом направлении.
Каждый вариант осуществления обеспечивает возможность выполнения множества измерений упругости, по одному для каждого из указанных различных линейных участков воспринимающей поверхности, расположенных между каждым из данного множества элементов и данным одним обратным элементом.
Такая конструкция имеет преимущество, заключающееся в обеспечении возможности выполнения множества различных измерений при минимизации требуемого числа компонентов. Поскольку один датчик или один актуатор может быть спарен соответственно с каждым из множества дополнительных обратных элементов, это позволяет избежать необходимости в выполнении отдельной, специально предусмотренной пары из актуатора и датчика для выполнения каждого измерения. Данный один датчик или актуатор эффективно используется вместе с каждым из данного множества обратных актуаторов или датчиков, и, следовательно, требуется только один. Это уменьшает затраты на устройство, а также обеспечивает минимизацию форм-фактора, необходимого для обеспечения заданного числа различных измерений.
В зависимости от размера всей конструкции из элементов взаимодействия с поверхностью конструкция может включать в себя или одну, или обе из вышеописанных конфигураций в конкретных вариантах осуществления. Кроме того, любая из двух данных конструкций или любой из двух способов функционирования могут быть скомбинированы вместе с ранее описанным способом функционирования, в котором пары актуаторов приводятся в действие одновременно или по отдельности.
В соответствии с одним или более множествами вариантов осуществления каждый из по меньшей мере подмножества элементов взаимодействия с поверхностью может быть выполнен с возможностью выполнения выбранной одной функции, а именно или оказания воздействия, или измерения давления. Это обеспечивает значительную гибкость и адаптируемость при работе устройства.
В частности, согласно данным вариантам осуществления контроллер может быть выполнен с возможностью избирательного переключения каждого из указанного по меньшей мере подмножества элементов взаимодействия с поверхностью между выполнением функции оказания воздействия и выполнением функции измерения.
Это позволяет по желанию адаптировать и изменять конфигурацию элементов взаимодействия с поверхностью для обеспечения любой произвольной комбинации актуаторов и датчиков. Это, в свою очередь, обеспечивает возможность получения более широкого выбора и разнообразия различных измерений упругости. При избирательном переключении различных комбинаций элементов между функциями оказания воздействия и измерения могут быть проанализированы различные участки воспринимающей поверхности, например, проходящие в различных направлениях и/или соответствующие разным расстояниям или длинам.
Кроме того, эта гибкость может обеспечить возможность сбора данных, представляющих собой множество различных показателей упругости для одного отдельно взятого участка воспринимающей поверхности. Разные показатели упругости могут потребовать обеспечения различных конфигураций или комбинаций актуаторов и датчиков. Когда функционирование элементов взаимодействия с поверхностью поддается изменению, множество этих различных показателей могут быть получены в примерах на одной и той же отдельно взятой зоне или на одном и том же отдельно взятом участке воспринимающей поверхности.
Согласно этому или любому другому варианту осуществления изобретения по меньшей мере подмножество элементов взаимодействия с поверхностью может содержать электроактивный полимерный материал, выполненный с возможностью деформирования в качестве реакции на подачу электрического сигнала и/или выполненный с возможностью генерирования электрического сигнала в качестве реакции на силу или давление, действующую (-ее) на элемент.
Электроактивные полимерные материалы обеспечивают возможность, в частности, одновременного оказания воздействия и измерения посредством наложения сигналов постоянного тока большой величины на низкоамплитудные сигналы переменного тока. Высокоамплитудный сигнал постоянного тока вызывает статическую деформацию, в то время как низкоамплитудный сигнал переменного тока создает возможность измерения давления посредством мониторинга изменений емкости.
В вариантах осуществления элементы, предназначенные для взаимодействия с поверхностью, могут быть выполнены с возможностью функционирования в соответствии с разными способами. В частности, актуаторы могут быть выполнены с возможностью или вызывания деформаций в плоскости воспринимающей поверхности (растягивания) и/или вызывания деформаций (углублений) не в плоскости воспринимающей поверхности. Аналогичным образом, датчики могут быть выполнены с возможностью обнаружения или измерения одной или обеих величин, представляющих собой давление или силу и действующих или в плоскости, или не в плоскости. Эти разные способы могут создать возможность получения различных показателей упругости.
Более конкретно, согласно одному или более вариантам осуществления управление элементами взаимодействия с поверхностью может включать:
управление по меньшей мере одним элементом взаимодействия с поверхностью для вызывания деформации не в плоскости в воспринимающей поверхности в соответствующей точке контакта и управление по меньшей мере дополнительным элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности не в плоскости, в дополнительной соответствующей точке контакта; и/или
управление по меньшей мере одним элементом взаимодействия с поверхностью для вызывания деформации в плоскости в воспринимающей поверхности в соответствующей точке контакта и управление по меньшей мере дополнительным элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности в плоскости или не в плоскости, в дополнительной соответствующей точке контакта.
Под выражением «в плоскости» понимается «в направлении, преимущественно или по существу параллельном воспринимающей поверхности». Под выражением «не в плоскости» понимается «в направлении, преимущественно или по существу перпендикулярном или нормальном к воспринимающей поверхности».
Эти разные способы воздействия на поверхность и измерения могут создать возможность получения различных показателей упругости поверхности. В частности, первый способ или первая конфигурация позволяет получить показатель сопротивления вдавливанию. При вызывании деформации не в плоскости (вдавливания) в первой точке и мониторинге давления или силы, действующего (-й) со стороны поверхности не в плоскости, в точке, смещенной в боковом направлении, можно измерить сопротивление поверхности вдавливанию. Чем сильнее сопротивление, тем больше будет падение давления, измеренное датчиком. Чем слабее сопротивление, тем меньше будет падение давления, измеренное датчиком.
Кроме того, в случае, когда предусмотрены два актуатора, окружающие один датчик, и управление обоими актуаторами осуществляется для вызывания одновременной деформации не в плоскости, показатель «свертки» способности к растяжению (или упругости в боковом направлении/упругости на поверхности раздела) и сопротивление вдавливанию могут быть получены центральным датчиком.
Согласно по меньшей мере одному или более примерам в некоторых случаях также может быть вызвана изменяющаяся во времени деформация не в плоскости. Это позволяет определить динамические показатели упругости.
Второй способ или вторая конфигурация в соответствии с одним или более примерами позволяет определить способность к растягиванию (упругость на поверхности раздела или упругость при сдвиге). Второй способ также позволяет в соответствии с одним или более вариантами осуществления измерить или оценить размер, или положение морщин. При создании деформации в боковом направлении и определении величины воздействия, требуемого перед возникновением реакции датчика, можно определить оцениваемый размер морщины, расположенной между актуатором и датчиком.
Второй способ также создает возможность выполнения дополнительных измерений в случае, когда вызывается деформация в плоскости, изменяющаяся во времени.
В частности, в соответствии с по меньшей мере одним множеством вариантов осуществления по меньшей мере один элемент взаимодействия с поверхностью может быть выполнен с возможностью вызывания деформации в плоскости, и по меньшей мере дополнительный элемент взаимодействия с поверхностью может быть выполнен с возможностью измерения давления и/или силы, действующих в плоскости или не в плоскости, и при этом контроллер выполнен с возможностью выдачи управляющего сигнала, изменяющегося во времени, указанному по меньшей мере одному элементу для управления данным по меньшей мере одним элементом для вызывания изменяющейся во времени деформации в плоскости в воспринимающей поверхности и дополнительно выполнен с возможностью определения - на основе выходного сигнала от дополнительного элемента, предназначенного для взаимодействия с поверхностью временной задержки между вызыванием деформации, изменяющейся во времени, и обнаружением изменения давления или силы в данном дополнительном элементе.
Деформация, изменяющаяся во времени, вызывает распространение поверхностной акустической волны (волны Лэмба) в воспринимающей поверхности, которая может быть обнаружена датчиком давления или силы, расположенным на некотором расстоянии от актуатора. При измерении временной задержки между генерированием волны и ее обнаружением датчиком может быть определена скорость волны. Исходя из этого может быть рассчитан показатель упругости кожи. В частности, для кожи скорость волны Лэмба позволяет определить вязкоупругие свойства кожи.
Согласно одному или более вариантам осуществления по меньшей мере один элемент взаимодействия с поверхностью может быть выполнен с возможностью одновременного вызывания деформации как в плоскости, так и не в плоскости, и при этом контроллер дополнительно выполнен с возможностью управления указанным по меньшей мере одним элементом взаимодействия с поверхностью для вызывания не изменяющейся во времени деформации не в плоскости воспринимающей поверхности.
Не изменяющаяся во времени деформация не в плоскости вызывает приложение статического (базового) давления к воспринимающей поверхности, в то время как изменяющаяся во времени деформация в плоскости вызывает поверхностные акустические волны (сдвиговые волны). При изменении степени деформирования не в плоскости может быть изменено статическое базовое давление, при котором создаются сдвиговые волны. Это обеспечивает дополнительную степень свободы системы и может придать дополнительный уровень глубины собранным данным, что позволяет получить более подробную картину упругости.
В альтернативном варианте изменение статической деформации не в плоскости может создать возможность регулирования соединения элемента, предназначенного для взаимодействия с поверхностью с воспринимающей поверхностью.
Одновременные деформации в плоскости и не в плоскости могут быть обеспечены с помощью ряда конкретных средств. Предпочтительно может быть применен актуатор на основе электроактивного полимера (ЕАР), при этом низкоамплитудный сигнал переменного тока накладывается на сигнал постоянного тока большой величины. Сигнал постоянного тока вызывает деформацию не в плоскости. Сигнал переменного тока вызывает изменяющуюся во времени деформацию в плоскости.
Может быть использован, например, диэлектрический эластомер или релаксорный полимер на основе поливинилиденфторида (PVDF).
В соответствии с по меньшей мере одним множеством вариантов осуществления контроллер может быть выполнен с возможностью управления первым элементом взаимодействия с поверхностью для вызывания деформации не в плоскости воспринимающей поверхности и с возможностью управления по меньшей мере дополнительным элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих не в плоскости в направлении к воспринимающей поверхности, и при необходимости при этом
контроллер выполнен с возможностью управления двумя элементами взаимодействия с поверхностью для вызывания соответствующих деформаций не в плоскости воспринимающей поверхности, при этом дополнительный элемент взаимодействия с поверхностью расположен между указанными двумя элементами.
В соответствии с данным множеством вариантов осуществления датчик выполнен с возможностью измерения давления или силы, действующего(-й) со стороны воспринимающей поверхности в направлении к воспринимающей поверхности, то есть фактически к датчику будет приложено тянущее усилие.
Этот вариант осуществления позволяет определить показатель поверхностного трения или адгезии с кожей. Деформация кожи вызывает оттягивание или отделение кожи от датчика. В случае, когда имеется малая адгезия с кожей или малое поверхностное трение, будет существовать малое или даже нулевое тянущее усилие, действующее на датчик, при этом кожа будет просто отходить от датчика. Когда имеется большая адгезия/большое трение, будет существовать большая сила, действующая при отделении кожи, и после отделения кожи будет действовать нулевая сила.
Согласно одному или более вариантам осуществления один или более из элементов взаимодействия с поверхностью могут быть дополнительно выполнены с возможностью выполнения функции измерения температуры, и при этом контроллер выполнен с возможностью управления указанным элементом для измерения температуры воспринимающей поверхности, и при необходимости при этом устройство дополнительно содержит нагревательный элемент, выполненный с возможностью нагрева элемента, предназначенного для взаимодействия с поверхностью и/или участка воспринимающей поверхности.
Известно, что температура оказывает влияние на упругость материала. Данные варианты осуществления обеспечивают возможность корректировки показателей упругости с учетом температуры в случае необходимости.
Кроме того, если предусмотрен нагревательный элемент, может быть выполнена систематическая оценка упругости кожи при различных температурах. Характеристики кожи в зависимости от температуры обеспечивают набор более глубоких данных, чем показатель только при одной температуре.
Измерение температуры может быть также использовано в вариантах осуществления при определении тепловых свойств кожи. Это может создать возможность, например, определения положения артерии или другого анатомического элемента под поверхностью. Это может способствовать размещению устройства для оптимальных измерений в конкретной зоне, представляющей интерес.
Согласно одному или более вариантам осуществления держатель может представлять собой податливый держатель для обеспечения его соответствия по форме топологии воспринимающей поверхности. В этих случаях держатель выполнен с возможностью адаптации его формы к контурам воспринимающей поверхности, на которую его накладывают. Это повышает эффективность устройства за счет гарантирования того, что все элементы, предназначенные для взаимодействия с поверхностью будут равномерно наложены на воспринимающую поверхность при минимальном разделяющем расстоянии.
В соответствии с по меньшей мере множеством вариантов осуществления устройство предназначено для наложения на кожу. В этих случаях держатель может быть гибким для придания ему формы, соответствующей контурам поверхности, представляющей собой воспринимающую поверхность кожи. Держатель также предпочтительно должен быть образован из локально сжимаемого материала для обеспечения ощущения мягкости и удобства для пользователей устройства. Держатель в конкретных примерах может быть выполнен с возможностью образования части устройства, пригодного для ношения, при этом устройство при использовании расположено с возможностью прочного удерживания держателя с прилеганием к коже пользователя.
Согласно дополнительному аспекту изобретения предложен способ определения показателя упругости воспринимающей поверхности на множестве различных линейных участков указанной воспринимающей поверхности посредством устройства анализа поверхности, при этом устройство анализа поверхности содержит:
держатель, имеющий поверхность; и
конструкцию из трех или более элементов взаимодействия с поверхностью и прикрепленных к поверхности держателя, при этом каждый элемент выполнен с возможностью выполнения только одной из функций оказания воздействия или измерения давления в любой отдельно взятый момент времени, и элементы отделены в пространстве друг от друга и распределены двумерно на поверхности держателя, и при этом конструкция включает в себя по меньшей мере первый элемент взаимодействия с поверхностью и выполненный с возможностью выполнения функции оказания воздействия, и по меньшей мере второй элемент взаимодействия с поверхностью и выполненный с возможностью выполнения функции измерения давления;
при этом способ включает:
управление первым элементом взаимодействия с поверхностью для вызывания деформации в воспринимающей поверхности в первой точке контакта;
управление вторым элементом взаимодействия с поверхностью для измерения давления и/или силы, действующих со стороны воспринимающей поверхности во второй, пространственно отделенной точке контакта, для обеспечения возможности определения показателя упругости воспринимающей поверхности между данными первой и второй точками; и
управление одним или более дополнительными элементами взаимодействия с поверхностью или для вызывания деформации в воспринимающей поверхности, или для измерения давления и/или силы, действующих со стороны воспринимающей поверхности в дополнительных одной или более точках контакта, чтобы посредством этого обеспечить возможность определения дополнительного показателя упругости между каждой из указанных дополнительных одной или более точек и или второй, или первой точкой контакта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения далее будут описаны подробно со ссылкой на сопровождающие чертежи, в которых:
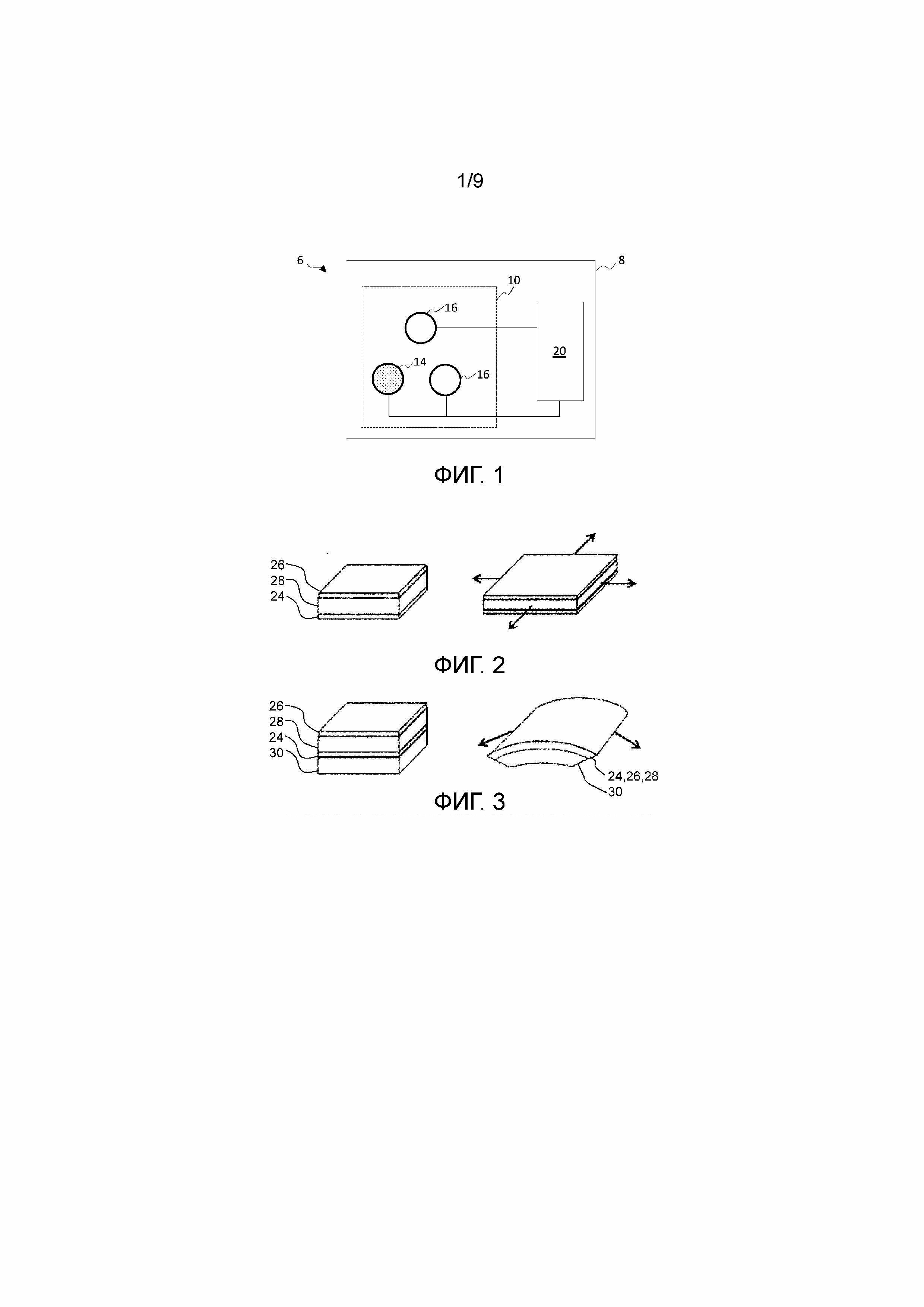
фиг.1 схематически показывает иллюстративное устройство анализа поверхности в соответствии с изобретением;
фиг.2 показывает известное устройство с электроактивным полимером, которое не зажато; фиг.3 показывает известное устройство с электроактивным полимером, которое удерживается посредством защитного слоя;
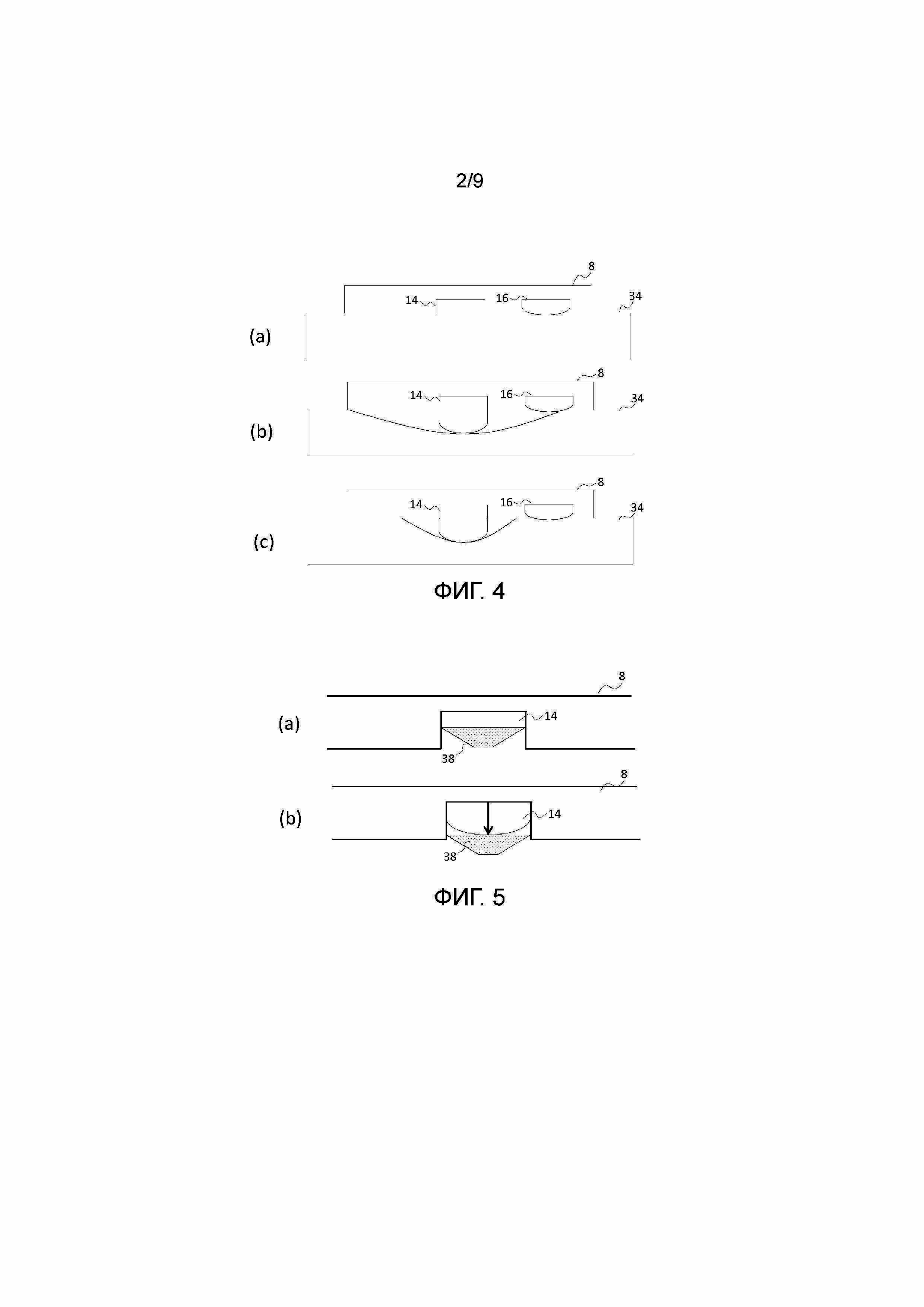
фиг.4 схематически иллюстрирует первый иллюстративный способ измерения упругости, реализуемый в соответствии с вариантами осуществления изобретения;
фиг.5 схематически иллюстрирует переходник для уменьшения площади приложения силы, создаваемой иллюстративным актуатором;
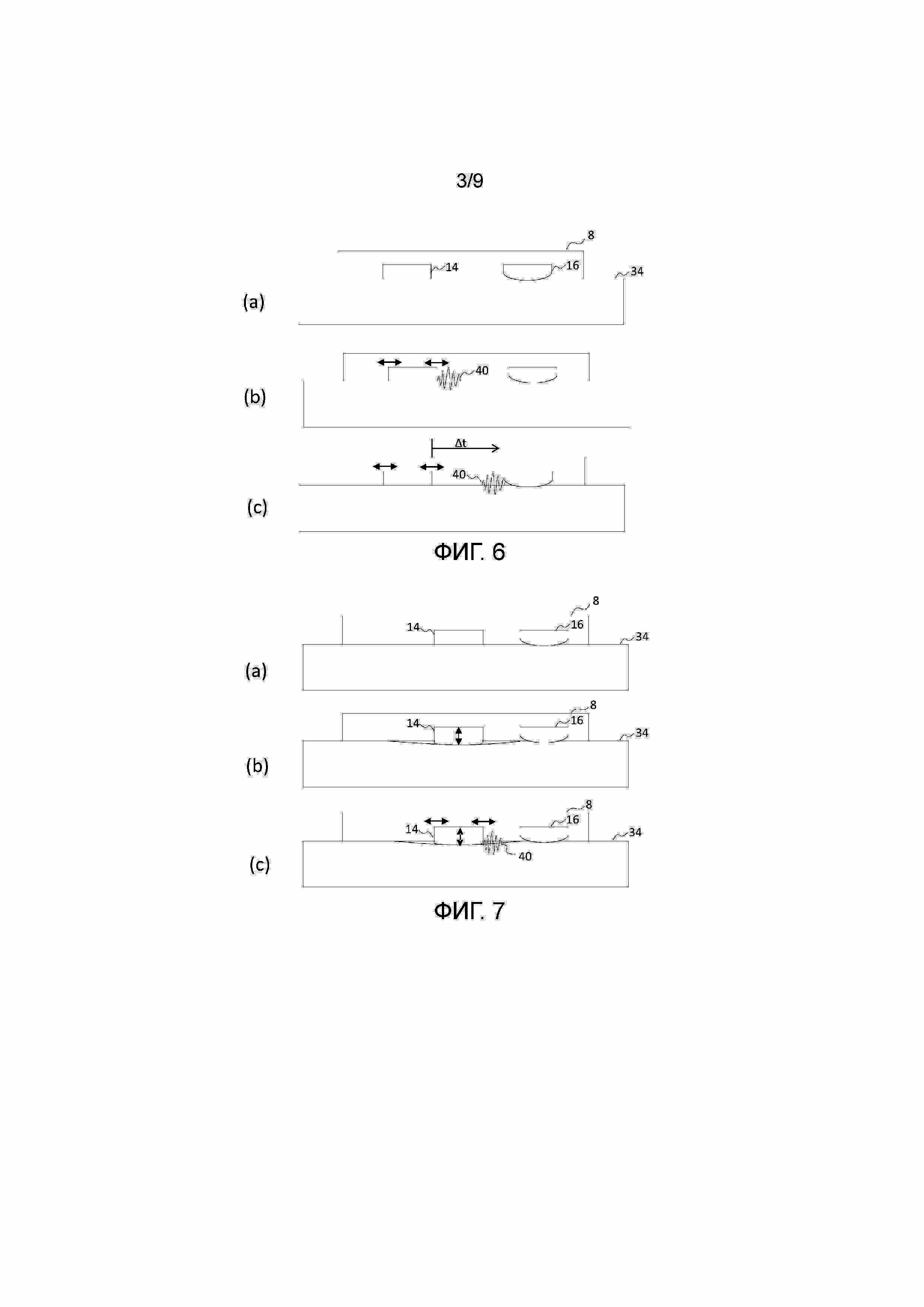
фиг.6 схематически иллюстрирует второй иллюстративный способ измерения упругости, реализуемый в вариантах осуществления изобретения;
фиг.7 схематически иллюстрирует третий иллюстративный способ измерения упругости, реализуемый в соответствии с вариантами осуществления изобретения;
фиг.8 схематически иллюстрирует средство измерения адгезии с кожей или поверхностного трения, реализуемое в вариантах осуществления изобретения;
фиг.9 показывает иллюстративные кривые зависимости выходного сигнала датчика от напряжения на актуаторе, полученные при использовании способа измерения адгезии с кожей или поверхностного трения;
фиг.10 схематически иллюстрирует способ определения местоположения и/или размера морщины, реализуемый в вариантах осуществления изобретения;
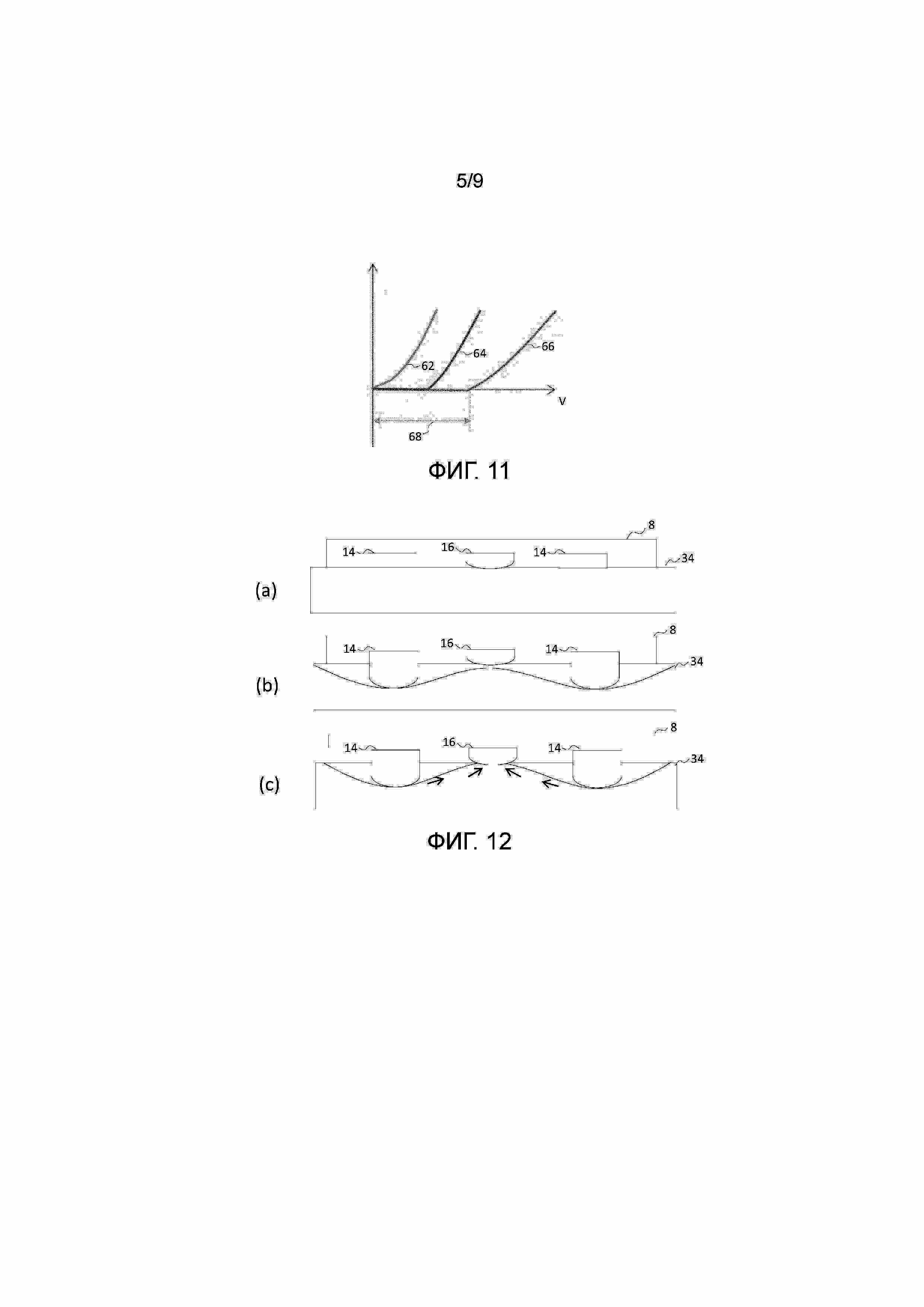
фиг.11 показывает иллюстративные кривые зависимости выходного сигнала датчика от напряжения на актуаторе, полученные при использовании способа определения местоположения и/или размера морщины;
фиг.12 схематически иллюстрирует четвертый иллюстративный пример измерения упругости, реализуемый в вариантах осуществления изобретения;
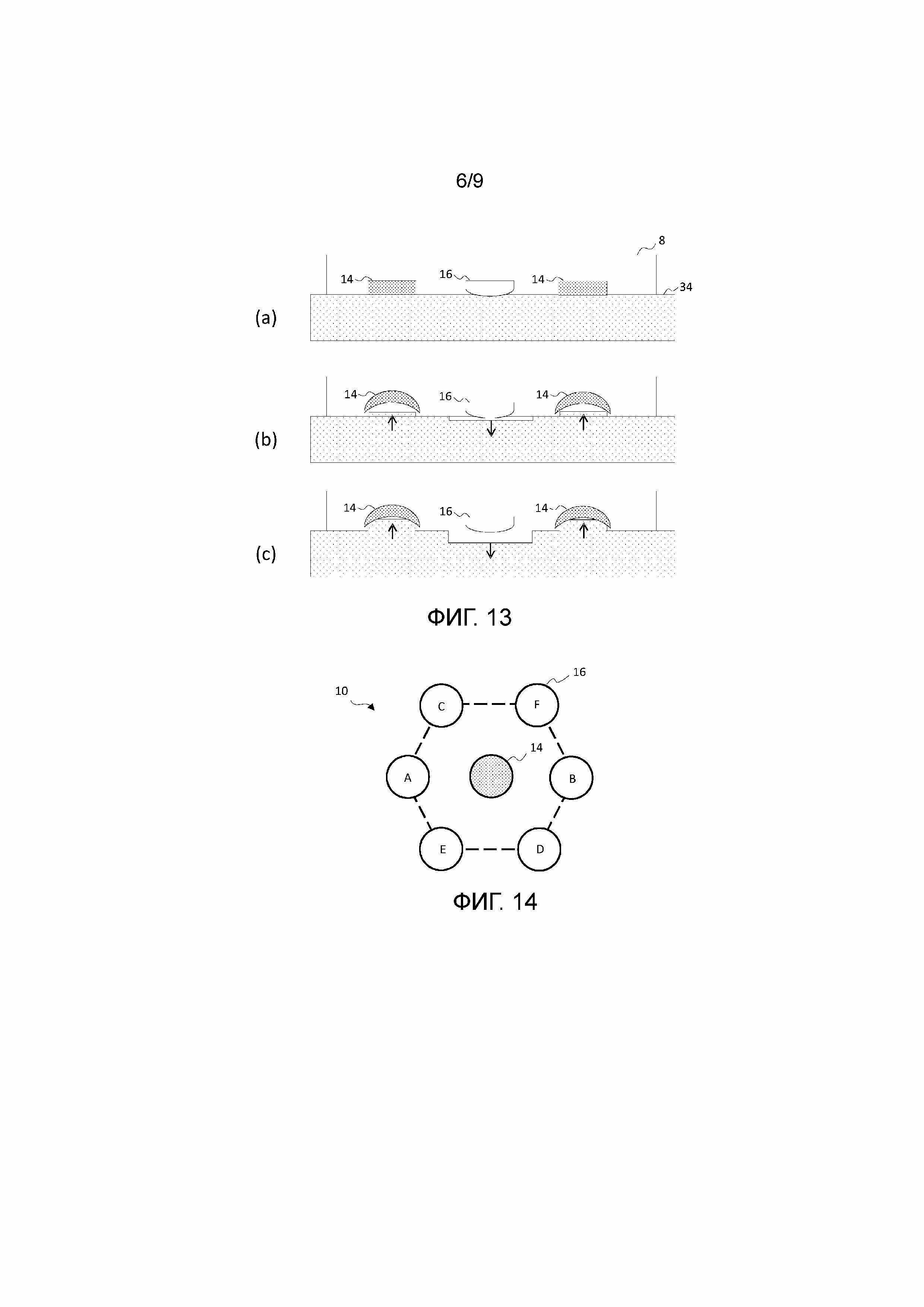
фиг.13 схематически иллюстрирует пятый иллюстративный способ измерения упругости, реализуемый в вариантах осуществления изобретения;
фиг.14 схематически иллюстрирует иллюстративную конструкцию из n элементов взаимодействия с поверхностью в соответствии с вариантами осуществления изобретения;
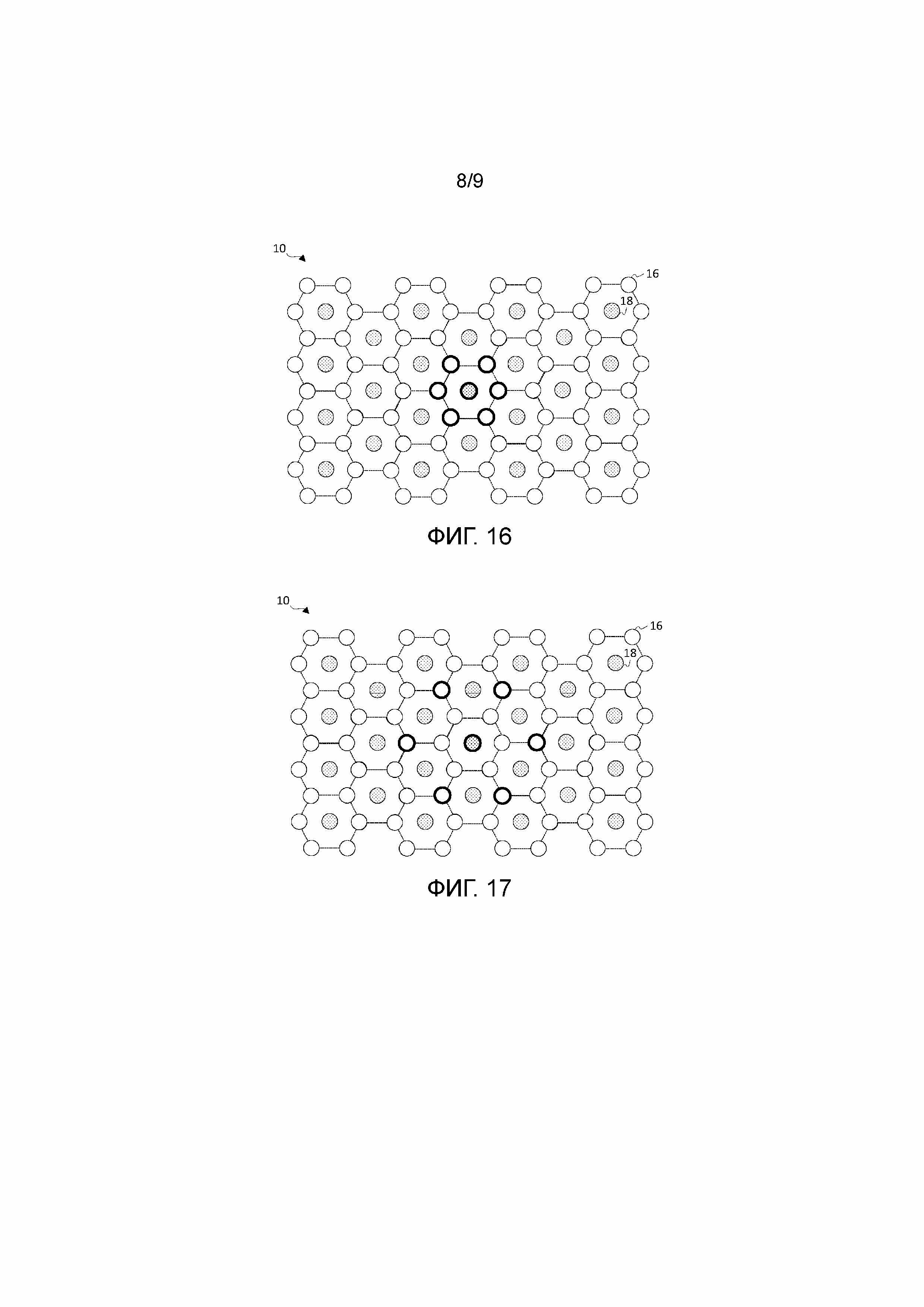
фиг.15 схематически иллюстрирует вторую иллюстративную конструкцию из элементов взаимодействия с поверхностью в соответствии с вариантами осуществления изобретения;
фиг.16 иллюстрирует иллюстративный способ функционирования второй иллюстративной конструкции из элементов взаимодействия с поверхностью;
фиг.17 иллюстрирует второй иллюстративный способ функционирования второй иллюстративной конструкции из элементов взаимодействия с поверхностью; и
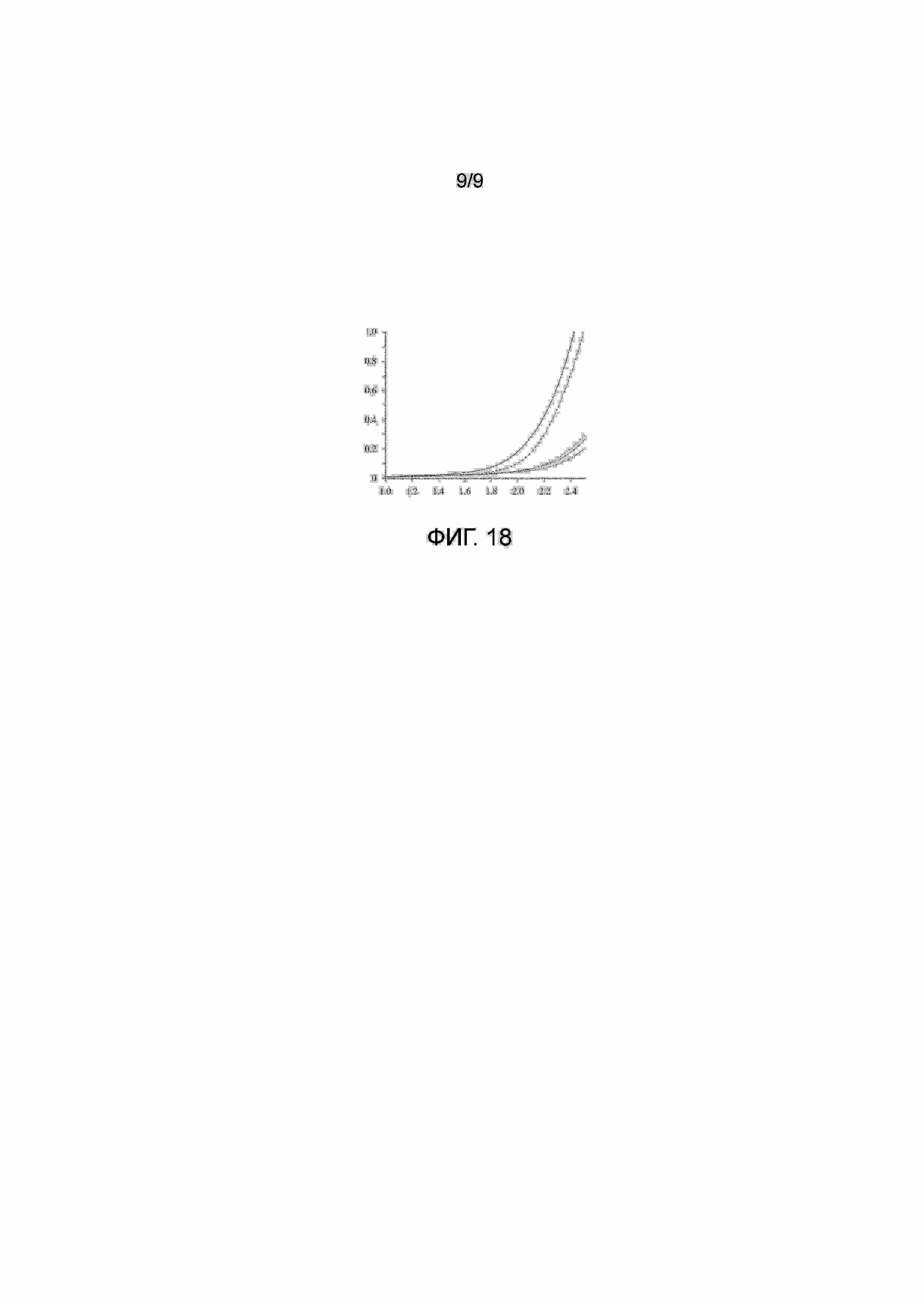
фиг.18 показывает разные кривые зависимости напряжений от деформаций для образца кожи, полученные при различных температурах.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Согласно изобретению предложено устройство анализа поверхности, предназначенное для наложения на воспринимающую поверхность для обеспечения возможности анализа по меньшей мере одного показателя упругости указанной поверхности на множестве различных линейных участков или частей поверхности. Устройство включает в себя двумерную конструкцию из актуаторов и датчиков, содержащую по меньшей мере один воздействующий элемент/актуатор по меньшей мере один чувствительный элемент и по меньшей мере один дополнительный чувствительный или воздействующий элемент. Выбранные множества из двух или более из данных элементов приводятся в действие вместе контроллером, при этом каждое множество включает в себя по меньшей мере один актуатор и один датчик, для получения показателя упругости между актуатором и датчиком из каждой пары в данном множестве посредством этого. Показатели упругости получают на основе вызывания деформации в воспринимающей поверхности в месте расположения актуатора и измерения результирующего давления и/или результирующей силы, действующих со стороны воспринимающей поверхности в дополнительной смещенной точке. Датчики могут отслеживать, например, изменение действующих давления и/или силы.
Первый базовый пример устройства 6 анализа поверхности в соответствии с изобретением проиллюстрирован на фиг.1. Устройство содержит держатель 8, к которому прикреплена конструкция 10 из элементов 14, 16 взаимодействия с поверхностью и контроллер 20, при этом контроллер функционально соединен с данными элементами.
В примере по фиг.1 предусмотрена конструкция 10 из трех элементов взаимодействия с поверхностью, которая включает в себя один элемент 14, выполненный с возможностью выполнения функции оказания воздействия, и два элемента 16, выполненные с возможностью выполнения функций измерения давления и/или силы. Элементы расположены на расстоянии друг от друга в пространстве и образуют треугольную конфигурацию.
Несмотря на то, что в данном примере конструкция из одного актуатора и двух датчиков приведена в качестве иллюстрации, в альтернативных примерах в качестве альтернативы могут быть предусмотрены один датчик и два актуатора.
Кроме того, конструкция из трех элементов 14, 16 взаимодействия с поверхностью представляет собой только простейший первый пример возможной конфигурации. В дополнительных примерах конструкция может быть расширена и может включать в себя любое число различных элементов взаимодействия с поверхностью расположенных с любой заданной схемой или конфигурацией. Конструкция большего размера позволяет получить большее число самых различных показателей упругости, соответствующих, например, большему числу различных участков воспринимающей поверхности или соответствующих разным конкретным измерениям или показателям упругости. Более подробные примеры дополнительных возможных конструкций и соответствующих способов функционирования будут описаны более подробно в нижеприведенных частях.
Держатель 8 выполнен с возможностью наложения на зону воспринимающей поверхности так, что каждый из элементов взаимодействия с поверхностью будет, в свою очередь, наложен или прижат к соответствующей точке или зоне воспринимающей поверхности (соответствующей точке контакта). Эта воспринимающая поверхность может представлять собой, например, кожу (хотя изобретение никоим образом не ограничено применением для кожи). В примерах контроллер может быть заделан в тело держателя или закрыт гибким защитным слоем иным образом, так что контроллер не будет прижат к воспринимающей поверхности при наложении держателя. Это могло бы помешать, например, функционированию устройства или могло бы создавать дискомфорт в случае наложения устройства на кожу пользователя.
Каждый из элементов взаимодействия с поверхностью также может быть закрыт или защищен гибким покрывающим слоем или для защиты элемента, или, например, для повышения удобства при использовании устройства. Покрывающий слой может представлять собой изолятор для защиты от любой электрической утечки или прохождения тока из элементов в кожу пользователя.
Держатель может иметь форму тонкой гибкой накладки или прокладки для легкого наложения на кожу и/или прилипания к коже пользователя. Такая накладка или прокладка должна быть гибкой для обеспечения возможности надежного и ровного соединения с кожей пользователя, но должна также сохранять жесткость, достаточную для противодействия деформации, вызываемой актуатором(-ами).
Контроллер 20 может быть выполнен с возможностью управления - в процессе работы - воздействующим элементом 14 для вызывания деформации (в плоскости или не в плоскости) в воспринимающей поверхности в точке или зоне поверхности, расположенной непосредственно под ним. Контроллер может быть выполнен с возможностью - одновременно с приведением в действие воздействующего элемента 14 или по меньшей мере пока еще продолжается приведение в действие/возбуждение данного элемента, - дополнительного управления одним или обоими из чувствительных элементов 16 для измерения или отслеживания давления и/или силы, действующих на них со стороны зоны или точки воспринимающей поверхности, расположенной под ними. При измерении и/или мониторинге данного давления и/или данной силы может быть получен показатель упругости (или жесткости) части или участка воспринимающей поверхности, расположенной(-го) между воздействующим элементом 14 и каждым соответствующим чувствительным элементом 16.
В частности, контроллер может управлять чувствительными элементами для мониторинга давления и/или силы в течение некоторого времени, так что могут быть определены изменения давления или силы. Может осуществляться мониторинг выходных сигналов чувствительных элементов как до, так и после возбуждения актуатора, так что могут быть определены изменения давления, возникающие в результате деформирования воспринимающей поверхности (воздействующим элементом).
Величина воспринимаемых изменений давления или силы зависит от упругости или жесткости материала, подвергающегося воздействию. В частности, в случае, если участок воспринимающей поверхности, расположенный между воздействующим элементом и соответствующим чувствительным элементом, является относительно жестким, ожидается, что изменение давления или силы, воспринимаемое чувствительным элементом, будет относительно бóльшим. Аналогичным образом, если участок поверхности является менее жестким, ожидается, что любое изменение силы или давления на датчике будет меньшим.
При оценке или сравнении измеренных значений давления и/или силы (или измеренных изменений этих значений) со стандартным контрольным набором значений можно получить соответствующий показатель упругости. В альтернативном варианте физическая модель может быть применена для вычисления соответствующего показателя упругости на основе детектированных выходных сигналов датчиков или изменений, указанных детектированных выходных сигналов.
В соответствии с по меньшей мере одним множеством предпочтительных вариантов осуществления воздействующие элементы 14 и/или чувствительные элементы 16 могут быть образованы при использовании электроактивного полимерного материала. Электроактивные полимеры (ЕАР) представляют собой развивающийся класс материалов в области электрически реагирующих материалов. Они могут функционировать в качестве датчиков или актуаторов и могут быть легко изготовлены с самыми разными формами, позволяющими легко встраивать их в самые разные системы.
Преимущества электроактивных полимеров включают низкую мощность, малый форм-фактор, гибкость, бесшумную работу, точность, возможность получения высокого разрешения, малое время реакции и циклическую активацию. В последние десять лет произошло значительное усовершенствование материалов в этой области, и их различные характеристики, такие как напряжение и деформация при возбуждении, были значительно улучшены. Технологические риски также были уменьшены до уровней, приемлемых для создания изделий, так что электроактивные полимеры представляют все больший интерес с коммерческой и технической точек зрения.
Улучшенные характеристики и особые преимущества электроактивных полимерных материалов привели к возможности их применения для новых областей применения. В общем и целом, устройство с электроактивным полимером может быть предпочтительно использовано в любом применении, в котором желательна малая величина перемещения компонента или элемента на основе электронного приведения в действие. Аналогичным образом, данная технология может быть использована для измерения малых перемещений.
Использование электроактивных полимеров создает возможность выполнения функций, которые были невозможны ранее, и обеспечивает существенные преимущества по сравнению с другими обычными решениями, связанными с датчиками/актуаторами, вследствие комбинации сравнительно большой деформации и силы при малом объемном коэффициенте или малом форм-факторе. Электроактивные полимеры также обеспечивают бесшумное функционирование, точное электронное управление, быструю реакцию и большой диапазон возможных частот возбуждения, таких как 0-1 МГц, в наиболее типичном случае составляющих менее 20 кГц.
Устройства, в которых используются электроактивные полимеры, могут быть подразделены на материалы, возбуждаемые полем, и материалы с ионным возбуждением.
Примеры электроактивных полимеров, возбуждаемых полем, включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе поливинилиденфторида (PVDF)) и диэлектрические эластомеры. Другие примеры включают электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами электроактивных полимеров с ионным возбуждением являются сопряженные/проводящие полимеры, композиты из ионных полимеров и металлов (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают ионные полимерные гели.
Электроактивные полимеры, возбуждаемые полем, возбуждаются электрическим полем посредством прямого электромеханического соединения. Они обычно требуют сильных полей (с большой напряженностью в Вольтах на метр), но малых токов. Полимерные слои обычно являются тонкими для сохранения как можно более низкого напряжения возбуждения. Электроактивные полимеры с ионным возбуждением возбуждаются электрически индуцируемым переносом ионов и/или растворителя. Они обычно требуют низких напряжений, но больших токов. Они требуют среды из жидкого/гелеобразного электролита (хотя некоторые системы материалов могут функционировать также при использовании твердых электролитов). Оба класса электроактивных полимеров имеют много элементов семейства, каждый из которых имеет свои собственные преимущества и недостатки.
Первым достойным упоминания подклассом электроактивных полимеров, возбуждаемых полем, являются пьезоэлектрические и электрострикционные полимеры. Несмотря на то, что электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, важное достижение в улучшении этих характеристик привело к получению релаксорных полимеров на основе поливинилиденфторида (PVDF), которые демонстрируют спонтанную электрическую поляризацию (ориентацию, полученную при возбуждении полем). Эти материалы могут быть предварительно деформированы для обеспечения улучшенных характеристик в направлении деформирования (предварительное деформирование приводит к лучшей ориентации молекул). Обычно используются металлические электроды, поскольку деформации обычно происходят в умеренном режиме (1-5%). Также могут быть использованы другие типы электродов (такие как проводящие полимеры, масла на основе углеродной сажи, гели или эластомеры и т.д.). Электроды могут быть непрерывными или сегментированными.
Другой представляющий интерес подкласс электроактивных полимеров, возбуждаемых полем, - это подкласс диэлектрических эластомеров. Тонкая пленка из этого материала может быть размещена между податливыми электродами, в результате чего формируется плоский конденсатор. В случае диэлектрических эластомеров магнитное натяжение, вызываемое приложенным электрическим полем, приводит к напряжению в пленке, вызывающему уменьшение ее толщины и увеличение ее площади. Деформация, как правило, увеличивается при предварительном деформировании эластомера (требующем рамки для сохранения предварительно деформированного состояния). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут быть использованы: для малых и умеренных деформаций могут быть предусмотрены металлические электроды и электроды из проводящих полимеров, для больших деформаций, как правило, используются масла на основе углеродной сажи, гели или эластомеры. Электроды могут быть непрерывными или сегментированными.
Первым достойным упоминания подклассом электроактивных полимеров с ионным возбуждением являются композиты из ионных полимеров и металлов (IPMC). IPMC состоят из набухшей в растворителе, ионообменной полимерной мембраны, размещенной между двумя тонкими металлическими электродами или электродами на углеродной основе, и требуют использования электролита. Типовыми материалами электродов являются Pt, Gd, углеродные нанотрубки (CNT), СРs, Pd. Типовыми электролитами являются растворы Li+ и Na+ на водной основе. При приложении поля катионы, как правило, перемещаются к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в зоне катода приводит к напряжению в остальной части полимерной матрицы, приводящему к изгибанию по направлению к аноду. Перемена полярности поданного напряжения приводит к изгибу в противоположном направлении. Хорошо известными полимерными мембранами являются Nafion® и Flemion®.
Другим достойным упоминания подклассом ионных полимеров являются сопряженные/проводящие полимеры. Актуатор из сопряженного полимера, как правило, состоит из электролита, размещенного между двумя слоями из сопряженного полимера. Электролит используется для изменения состояния окисления. При подаче потенциала на полимер посредством электролита электроны добавляются к полимеру или удаляются из него, вызывая окисление и восстановление. Восстановление приводит к сужению, окисление - к расширению.
В некоторых случаях добавляют тонкопленочные электроды, когда сам полимер не имеет достаточной проводимости (в направлении его размера). Электролит может представлять собой жидкость, гель или твердый материал (то есть комплекс из полимеров с высокой молекулярной массой и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Актуатор также может быть образован из углеродных нанотрубок (CNT), подвешенных в электролите. Электролит образует двойной слой с нанотрубками, создавая возможность инжекции зарядов. Эта инжекция заряда в двойном слое рассматривается как основной механизм в актуаторах из углеродных нанотрубок. Углеродная нанотрубка служит в качестве электродного конденсатора с зарядом, инжектированным в углеродную нанотрубку, который затем уравновешивается посредством электрического двойного слоя, образованного за счет перемещения электролитов к поверхности углеродной нанотрубки. Изменение заряда атомов углерода приводит к изменению длины углерод-углеродной связи. В результате можно наблюдать расширение и сужение одной углеродной нанотрубки.
Фиг.2 и 3 показывают два возможных способа функционирования устройства с электроактивным полимером.
Устройство содержит слой 28 электроактивного полимера, размещенный между электродами 24, 26, расположенными с противоположных сторон слоя 28 электроактивного полимера.
Фиг.2 показывает устройство, которое не зажато. Используется напряжение для обеспечения расширения слоя электроактивного полимера во всех направлениях, как показано.
Фиг.3 показывает устройство, которое спроектировано так, что расширение возникает только в одном направлении. Устройство опирается на несущий слой 30. Напряжение используется для обеспечения изгибания или выгибания слоя электроактивного полимера.
Электроды, слой электроактивного полимера и несущий элемент могут рассматриваться вместе как образующие в целом структуру с электроактивным полимером.
Данное перемещение возникает, например, вследствие взаимодействия между активным слоем, который расширяется при возбуждении, и пассивным несущим слоем. Для получения асимметричного изгибания вокруг оси, как показано, может применяться, например, ориентация молекул (растягивание пленки), вызывающая перемещение в одном направлении.
Расширение в одном направлении может быть следствием асимметрии в электроактивном полимере, или оно может возникать в результате асимметрии в характеристиках несущего слоя, или вследствие комбинации обоих факторов.
Структура с электроактивным полимером, подобная описанной выше, может быть использована как для оказания воздействия, так и для измерения. Следовательно, она может быть использована для получения как воздействующих элементов 14 в примерах по настоящему изобретению, так и чувствительных элементов 16.
Наиболее известные механизмы измерений базируются на измерениях силы и обнаружении деформации. Диэлектрические эластомеры, например, могут быть легко растянуты под действием внешней силы. При подаче низкого напряжения на датчик может быть измерена деформация в зависимости от напряжения (напряжение зависит от площади).
Другим способом измерения посредством систем, возбуждаемых полем, является непосредственное определение изменения емкости или определение изменений сопротивления электродов в зависимости от деформации.
Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрический заряд в качестве реакции на приложенное механическое напряжение (при условии, что степень кристалличности достаточно высока для генерирования обнаруживаемого заряда). Сопряженные полимеры могут обеспечить использование пьезо-ионного эффекта (механическое напряжение приводит к ионному воздействию). При подвергании углеродных нанотрубок воздействию механического напряжения на их поверхности возникает изменение заряда, которое может быть измерено. Также было показано, что сопротивление углеродных нанотрубок изменяется в контакте с молекулами газов (например, O2, NO2), что делает углеродные нанотрубки пригодными в качестве детекторов газов.
С учетом того, что электроактивные полимеры способны функционировать или в режиме возбуждения, или в режиме измерения, использование этих материалов связано с дополнительным важным преимуществом, заключающимся в обеспечении возможности адаптации элементов взаимодействия с поверхностью к функционированию или в качестве актуатора, или в качестве датчика. Согласно одному или более примерам контроллер может быть выполнен с возможностью переключения режима работы одного или более элементов, образованных на основе электроактивных полимеров и предназначенных для взаимодействия с поверхностью между оказанием воздействия и измерением.
Как отмечено выше, это позволяет адаптировать и изменять конфигурацию элементов взаимодействия с поверхностью для обеспечения возможности получения более широкого выбора и разнообразия различных измерений упругости. При избирательном переключении различных комбинаций элементов между функциями оказания воздействия и измерения могут быть проанализированы, например, различные участки воспринимающей поверхности, проходящие в различных направлениях и соответствующие разным расстояниям или длинам.
Кроме того, эта гибкость может обеспечить возможность сбора данных, представляющих собой множество различных показателей упругости, для одного отдельно взятого участка воспринимающей поверхности. Разные показатели упругости могут потребовать обеспечения различных конфигураций или комбинаций актуаторов и датчиков. Когда функционирование элементов взаимодействия с поверхностью поддается изменению, множество данных различных измерений могут быть выполнены в примерах на одной и той же отдельно взятой зоне или на одном и том же отдельно взятом участке воспринимающей поверхности.
Воздействующий или чувствительный элемент на основе электроактивного полимера может быть образован из многослойной конфигурации из электроактивных полимеров, содержащей множество электродных компонентов из электроактивных полимеров, покрытых гибким изолятором. При функционировании в режиме оказания воздействия степень деформирования воспринимающей поверхности можно регулировать посредством регулирования напряжения возбуждения, подаваемого на воздействующий элемент.
Несмотря на то, что электроактивные полимеры описаны в качестве предпочтительного примера материала для выполнения актуаторов и/или датчиков, изобретение не ограничено применением электроактивных полимеров для выполнения или воздействующих элементов, или чувствительных элементов. Другие альтернативные иллюстративные материалы для воздействующих элементов включают другие электроактивные или электроуправляемые материалы, например, такие как жидкокристаллические полимерные сетки, жидкокристаллические эластомеры, электрореологические эластомеры, материалы с памятью формы (например, активируемые теплом материалы с памятью формы), пьезокерамические материалы или магнитоуправляемые материалы, такие как магнитострикционные материалы.
Кроме того, могут быть рассмотрены другие виды актуатора, не включающего в себя электроактивные или электроуправляемые материалы, включая, например, актуаторы, предусматривающие использование технологий, связанных с миниатюрными актуаторами на основе надувных элементов, или актуаторы с применением микроэлектромеханической системы (MEMS).
Аналогичным образом, чувствительные элементы могут быть получены посредством других устройств для измерения силы и/или давления, включая, в числе прочего, тензодатчики, пьезоэлектрические датчики (например, керамические элементы или фольгу на основе поливинилиденфторида (PVDF)) и емкостные датчики.
В процессе работы показатели упругости воспринимающей поверхности могут быть получены при использовании элементов взаимодействия с поверхностью в соответствии с рядом различных методов и способов/режимов. Выбор этих различных возможных способов будет далее описан подробно. Следует отметить, что любой отдельно взятый вариант осуществления устройства анализа поверхности может быть выполнен с возможностью реализации одного или любой комбинации данных способов. В зависимости от размера конструкции из элементов взаимодействия с поверхностью множество различных способов могут быть реализованы одновременно или могут быть реализованы по отдельности посредством контроллера.
Фиг.4 иллюстрирует первый иллюстративный способ или метод получения показателя упругости воспринимающей поверхности. Фигура показывает вид в разрезе иллюстративного устройства, наложенного на воспринимающую поверхность 34. Для представленного примера предполагается, что воспринимающая поверхность представляет собой кожу, хотя иллюстративный способ также может применяться для других воспринимающих поверхностей. Показан держатель 8, обеспечивающий опору для одного воздействующего элемента 14 и одного датчика 16 давления, прилегающих к поверхности кожи 34. Для ясности показаны только эти два элемента. Тем не менее, следует понимать, что варианты осуществления устройства в реальных ситуациях содержат более двух элементов, и данный способ может быть реализован при использовании любой пары элементов из большей отдельно взятой конструкции.
Фиг.4а показывает конструкцию в первом, неактивном состоянии, в котором воздействующий элемент 14 бездействует. Как показано на фиг.4b, при подаче управляющего напряжения посредством контроллера (не показанного на фиг.4) воздействующий элемент/актуатор деформируется для расширения в направлении, проходящем вниз к воспринимающей поверхности. Эта деформация создает эффект приложения силы, направленной вниз, к воспринимающей поверхности 34 и посредством этого вызывает деформацию не в плоскости (или вдавливание) в поверхности кожи 34.
В неограничивающих примерах воздействующий элемент может представляет собой актуатор на основе электроактивного полимера, содержащий один или более слоев электроактивного полимерного материала и выполненный с возможностью деформирования в качестве реакции на применение электрического раздражителя (как описано выше).
Чувствительный элемент 16 выполнен с возможностью измерения давления, приложенного к нему со стороны воспринимающей поверхности. Он также может быть образован одним или более компонентами из электроактивных полимеров и использован для измерения давления в соответствии с вышеописанными методами. В альтернативном варианте чувствительный элемент может представлять собой датчик давления и/или силы другого типа, такой как тензодатчик, пьезоэлектрический датчик (например, керамические элементы или фольгу на основе поливинилиденфторида (PVDF)) или емкостный датчик.
Фиг.4b показывает пример, в котором слой кожи (воспринимающая поверхность) 34 является относительно жестким (или твердым, или неупругим). Фиг.4с, напротив, показывает пример, в котором воспринимающая поверхность является относительно менее жесткой (или твердой, или более упругой). В случае, когда воспринимающая поверхность является относительно более жесткой, относительный диаметр индуцированного углубления в воспринимающей поверхности 34 будет больше. В случае, когда воспринимающая поверхность является менее жесткой, относительный диаметр углубления, вызванного деформацией, будет меньше.
Следует отметить, что термин «жесткий» в вышеприведенном описании следует интерпретировать в широком смысле, и он может относиться к коже, которая является более твердой или менее упругой, или может в альтернативном варианте относиться к одному или более из других физических свойств, вызывающих проиллюстрированное поведение. Эти свойства могут относиться, например, к характеристикам вязкости кожи или натяжению или провисанию верхнего поверхностного слоя кожи.
Термин «жесткий» или «упругий» или «упругость» может относиться к «эффективной упругости», в которой учтено множество физических свойств и факторов. Он может не относиться непосредственно к какому-либо конкретному классическому показателю упругости (такому как модуль упругости), но может соответствовать более общей или широкой концепции, предназначенной для охвата более широкого набора свойств и факторов, которые могут влиять на реакцию в виде деформации типовой зоны кожи.
Эта сложная комбинация различных физических факторов приводит к вышеописанному результату, состоящему в том, что приложение локально сосредоточенной силы в точке на коже, имеющей бóльшую «эффективную упругость» или уменьшенную «жесткость», приводит к углублению, имеющему меньший относительный диаметр.
В результате различающихся свойств кожи на каждой из фиг.4а и 4b элемент 16 для измерения давления или силы, расположенный со смещением от актуатора 14 в боковом направлении, воспринимает изменение в измеряемом им давлении, которое различается в каждой из данных двух ситуаций. В случае более жесткой кожи (фиг.4b), в котором диаметр индуцированного углубления больше, бóльшая зона кожи 34 оттягивается от основания датчика, и поэтому результирующее давление, приложенное к датчику со стороны воспринимающего слоя, уменьшается. В случае менее жесткой кожи (фиг.4с), в котором размер индуцированного углубления меньше, оттягивается меньший участок кожи или даже вообще никакая кожа не оттягивается от датчика, и поэтому любое измеренное уменьшение давления будет меньше.
Следовательно, посредством мониторинга показаний давления, определенных датчиком 16 до и/или после деформирования кожи 34, может быть получен показатель степень упругости кожи. В частности, этот способ измерения позволять получить показатель сопротивления кожи вдавливанию (упругость кожи не в плоскости).
В конкретных примерах выходной сигнал давления, выдаваемый датчиком, может отслеживаться как до, так и после возбуждения актуатора, и может быть определено изменение значений давления. В других примерах могут быть зафиксированы только значения исходного давления после возбуждения.
В любом из двух случаев зарегистрированные или определенные значения в примерах могут быть подвергнуты сравнению или оценке в сравнении с некоторым стандартным набором базовых значений для получения некоторого количественного показателя степени упругости посредством этого. Данные значения также могут быть введены в качестве переменных в физическую модель, которая обеспечивает возможность определения количественного показателя упругости.
В любом из двух случаев эта дополнительная обработка данных согласно одному или более примерам может быть выполнена самим контроллером или дополнительным блоком анализа, включенным в устройство. В альтернативном варианте устройство может быть выполнено с возможностью выдачи только самих исходных значений, при этом любой анализ выполняется впоследствии внешней системой или оператором.
В том случае, когда используется актуатор на основе электроактивного полимера, можно вызвать не только статические деформации актуатора, но и также деформации, изменяющиеся во времени, при этом степень расширения актуатора изменяется в зависимости от времени. Статическая деформация обеспечивается при подаче управляющего сигнала постоянного тока к актуатору. Напротив, «осциллирующая» деформация может быть обеспечена при подаче сигнала переменного тока к актуатору.
Вызывание деформации, изменяющейся во времени, в актуаторе 14 вызывает изменение глубины индуцированного углубления (например, циклическое) с течение времени. Это может создать возможность получения дополнительных динамических показателей упругости. Например, деформация, изменяющаяся во времени, может вызвать блуждающие волны в воспринимающей поверхности 34. Скорость, с которой волны распространяются через кожу, может характеризовать упругость кожи.
Согласно одному или более примерам воздействующий элемент 14 может быть предусмотрен с переходником для изменения площади, на которой сила будет приложена к воспринимающей поверхности 34 воздействующим элементом. Пример показан на фиг.5, которая иллюстрирует переходник 38 уменьшения общей площади, на которой деформирующее усилие, создаваемое актуатором 14, будет приложено к воспринимающей поверхности. Следовательно, это приводит к увеличению давления, которое приложено к поверхности. Фиг.5а и 5b показывают конструкцию соответственно в бездействующем и рабочем состояниях.
В дополнительных примерах может быть предусмотрен другой переходник, например, переходник увеличения площади, на которой будет приложена сила (и, следовательно, для уменьшения величины приложенного давления).
Пример по фиг.4 иллюстрирует способ определения сопротивления воспринимающей поверхности вдавливанию на основе вызывания деформации не в плоскости поверхности и измерения давления и/или силы, действующих со стороны воспринимающей поверхности не в плоскости.
Согласно дополнительным примерам также могут быть получены один или более показателей упругости в плоскости. В простом первом примере это может быть обеспечено при использовании варианта иллюстративной конструкции по фиг.4, в котором предусмотрены два актуатора 14, которые расположены по одному с каждой из двух сторон датчика и которые выполнены с возможностью расширения в боковом направлении (в направлении, по существу параллельном воспринимающей поверхности). Предусмотрен датчик 16, выполненный с возможностью измерения боковой силы, приложенной на его нижней активной поверхности.
При возбуждении двух актуаторов для их одновременного деформирования в боковом направлении обеспечивается растягивание той зоны кожи, которая расположена между ними (то есть, вызывается деформация кожи в плоскости). Управление датчиком, расположенным между двумя актуторами, осуществляется для мониторинга боковых сил, действующих (в плоскости) со стороны воспринимающей поверхности на его нижнюю поверхность. Зависящая от упругости кожи, различная величина силы будет измеряться датчиком для данной боковой деформации актуаторов. В частности, сила, измеренная после деформирования, будет больше для кожи, которая является относительно более жесткой, и будет меньше для кожи, которая является относительно более вялой или более упругой.
Как и в предыдущем случае, контроллер может быть выполнен с возможностью вычисления изменения измеренной силы (до и после возбуждения) или с возможностью простой регистрации исходных значений силы. Эти рассчитанные или исходные значения, как и в предыдущем случае, могут быть подвергнуты сравнению с некоторым стандартным набором базовых значений для получения количественного показателя упругости кожи (или другой поверхности) в плоскости. В альтернативном варианте значения могут быть обработаны при использовании физической модели для получения количественного показателя упругости посредством этого.
Согласно дополнительному иллюстративному варианту иллюстративный вариант по фиг.4 может быть просто расширен так, что он будет включать в себя два воздействующих элемента 16 (расположенных с каждой из двух сторон чувствительного элемента 18), которые оба выполнены с возможностью вызывания деформаций (углублений) не в плоскости.
Возбуждение данных двух актуаторов может осуществляться контроллером для одновременного индуцирования углублений на поверхности с каждой из двух сторон чувствительного элемента. В этом случае обеспечивается комбинация вдавливания и растягивания. Датчик может измерять «свертку» данных двух эффектов.
В этом случае датчик может быть выполнен с возможностью измерения боковой силы, приложенной на его нижней активной поверхности, или может быть выполнен с возможностью измерения силы, приложенной не в плоскости (то есть перпендикулярной к воспринимающей поверхности) к его нижней активной поверхности. В любом из двух случаев на выходной сигнал датчика могут влиять как вдавливание, так и растягивание, и, следовательно, полученные результаты измерений силы/давления могут давать показатель, который отражает оба данных физических эффекта.
Фиг.6 показывает дополнительный иллюстративный способ функционирования и измерения, посредством которого может быть получен дополнительный альтернативный показатель упругости поверхности. В этом случае держатель 8, предусмотренный в устройстве, удерживает конструкцию, которая включает в себя воздействующий элемент 14, выполненный с возможностью вызывания деформаций в плоскости, и чувствительный элемент 16, выполненный с возможностью измерения давлений и/или сил, действующих не в плоскости. Как и в предыдущем случае, несмотря на то, что только два элементы показаны для целей данного примера, реальные варианты осуществления изобретения включают в себя конструкции, содержащие более двух элементов. Управление множеством пар таких конструкций может осуществляться в соответствии с данным способом функционирования для обеспечения множества измерений упругости.
Как показано на фиг.6b, воздействующий элемент 14 возбуждается посредством управляющего напряжения, изменяющегося во времени, что вызывает его деформирование в боковом направлении, изменяющееся во времени, посредством чего вызывается деформация в плоскости воспринимающей поверхности 34, изменяющаяся во времени. Это проявляется в генерировании поверхностной (акустической) волны 40 Лэмба, которая распространяется по поверхности 34.
Как показано на фиг.6с, эта волна 40 обнаруживается чувствительным элементом 16 как волна давления с задержкой Δt времени. На основе задержки времени может быть рассчитана скорость волны.
Существует прямая корреляция между скоростью распространения упругой сдвиговой волны и жесткостью материала, через который она распространяется. В результате этого значение скорости волны характеризует упругость воспринимающей поверхности. В частности, в случае применения данного способа для кожи скорость этой поверхностной акустической волны (волны Лэмба) может характеризовать вязкоупругие свойства кожи пользователя.
Этот способ измерения (или способ, проиллюстрированный на фиг.4) может быть расширен в дополнительных примерах за счет включения дополнительных чувствительных элементов 16, расположенных вблизи воздействующего элемента 14. Каждый чувствительный элемент может быть расположен в примерах рядом с актуатором (при отсутствии каких-либо других элементов между ними), например, образующим кольцевую конструкцию, которая окружает центральный датчик.
Такая конфигурация позволяет одновременно получить множество показателей упругости (или показателей вдавливания, или вязкоупругих свойств), поскольку одна картина деформации, вызываемой центральным актуатором, может быть определена или отслежена каждым из окружающих чувствительных элементов в одно и то же время. Такая конфигурация обеспечивает возможность, например, более быстрой записи данных и более эффективного потребления энергии.
Фиг.7 показывает вариант иллюстративного способа функционирования по фиг.6, в котором воздействующий элемент 14 выполнен с возможностью расширения как в боковом направлении, так и в перпендикулярном направлении (то есть как параллельно, так и перпендикулярно к воспринимающей поверхности 34). Как показано на фиг.7b, сначала управление актуатором осуществляется для его статического деформирования в направлении, перпендикулярном (нормальном) к воспринимающей поверхности, для вызывания статической (не изменяющейся во времени) деформации (вдавливания) не в плоскости в воспринимающей поверхности.
Как показано на фиг.7с, затем осуществляется одновременное управление актуатором 14 для его деформирования, изменяющегося во времени, в боковом направлении. Изменяющееся во времени расширение в боковом направлении вызывает результирующую поверхностную акустическую волну 40 (волну Лэмба), которая распространяется вдоль (уже вдавленной) воспринимающей поверхности 34 в направлении смещенного в боковом направлении, чувствительного элемента 16. Чувствительный элемент выполнен с возможностью обнаружения вступления волны, как и в примере по фиг.6. Как и в предыдущем случае, скорость волны может быть определена на основе измеренного времени вступления.
Статическая деформация не в плоскости служит для регулирования статического (базового) давления актуатора 14 на воспринимающую поверхность 34. Это может обеспечить возможность регулирования соединения актуатора с воспринимающей поверхностью или может обеспечить возможность выполнения множества измерений скорости волны 40, соответствующих разным статическим давлениям. В последнем случае статическое давление обеспечивает дополнительную степень свободы в системе, что может создать возможность выполнения более глубокого и более подробного анализа упругости поверхности.
Одновременное стимулирование как статического расширения актуатора в перпендикулярном направлении, так и его расширения в боковом направлении, изменяющегося во времени, может быть обеспечено в примерах посредством подачи наложенных сигналов постоянного тока и переменного тока к элементу из электроактивного полимера. Сигнал постоянного тока большой величины вызывает статическое расширение в направлении, нормальном к воспринимающей поверхности, и низкоамплитудный сигнал переменного тока вызывает расширение, изменяющееся во времени, в направлении, параллельном воспринимающей поверхности. Это может быть обеспечено наилучшим образом при использовании диэлектрического эластомера. Также могут быть использованы релаксорные полимеры на основе поливинилиденфторида (PVDF), хотя достижимое смещение будет меньше.
В соответствии с дополнительным иллюстративным способом функционирования может быть получен показатель адгезии с кожей и поверхностного трения. Это достигается посредством измерения так называемой силы отрыва образца кожи при вдавливании и смещении кожи. Фиг.8 схематически показывает иллюстративную конфигурацию для обеспечения данного измерения. Конструкция включает в себя два актуатора 14, выполненные с возможностью вызывания деформаций не в плоскости поверхности 34 кожи, при этом актуаторы расположены вокруг центрального чувствительного элемента 16.
В этом случае чувствительный элемент 16 должен быть выполнен с возможностью измерения как положительных, так и отрицательных сил/давлений; он должен быть выполнен с возможностью измерения силы или давления, действующей (-го) со стороны воспринимающей поверхности в направлении внутрь к поверхности, (то есть «силы оттягивания» от нижней поверхности самогó чувствительного элемента), а также силы, действующей в направлении вверх к его собственной нижней поверхности.
Как показано на фиг.8, при возбуждении обоих актуаторов 14 результирующая деформация поверхности 34 кожи обеспечит приложение направленной вниз силы, которая действует для оттягивания кожи от поверхности чувствительного элемента 16. При оттягивании кожи она обеспечивает оттягивание датчика 16 вниз с величиной, которая зависит от адгезии с кожей. Максимальная величина этой силы оттягивания вниз известна как сила «отрыва».
Для обеспечения повышенной чувствительности сила отрыва может быть увеличена за счет использования относительно гладкой и/или мягкой поверхности датчика, которая может усилить способность к адгезии с кожей. Адгезия с кожей и поверхностное трение коррелируются, и поэтому показатель адгезии (или «сцепляемости») характеризует трение.
Сила отрыва (и, следовательно, адгезия с кожей) может быть определена из кривой зависимости выходного сигнала датчика от напряжения на актуаторе. Два примера таких кривых показаны на графике по фиг.9, на котором ось x показывает напряжение на актуаторе 14, и ось y показывает силу, измеренную чувствительным элементом 16.
Кривая 44 показывает кривую выходного сигнала, которая получена для кожи, характеризующейся малой адгезией и трением. В данном случае измеренная сила приблизительно линейно уменьшается до нуля при увеличении деформации актуаторов и затем остается на нуле при всех дальнейших напряжениях возбуждения. Это указывает на то, что имеется нулевая воспринимаемая сила отрыва; адгезия с кожей слишком мала, чтобы вызвать какое-либо поддающееся измерению прилипание кожи к датчику 16.
Кривая 46 показывает кривую выходного сигнала, которая получена для кожи, характеризующейся большой (большей) адгезией и трением. Как и в предыдущем случае, в данном случае измеренная сила уменьшается линейно до нуля при увеличении напряжения, но затем продолжает уменьшаться до отрицательных измеренных значений силы, достигая минимального значения, показанного пунктирной линией 48. Пунктирная линия 48 показывает «силу отрыва»: силу, необходимую для того, чтобы кожа начала отделяться от датчика. После значения силы отрыва измеренная сила увеличивается приблизительно линейно снова до нуля, что показывает, что кожа медленно сама отделяется.
При анализе полученных графиков зависимости выходного сигнала датчика от напряжения возбуждения можно определить силу отрыва для данного образца кожи и, следовательно, получить показатель адгезии с кожей и поверхностного трения.
В вариантах только один актуатор и один датчик могут быть использованы для измерения силы отрыва при условии, что данные два элемента размещены достаточно близко друг к другу.
Согласно дополнительному иллюстративному способу функционирования может быть выполнено измерение размера и/или определение местоположения морщины на коже. Этот способ проиллюстрирован на фиг.10. Актуатор 14, выполненный с возможностью деформирования в боковом направлении, используется в комбинации с датчиком 16, выполненным с возможностью измерения сил или давлений, действующих или в плоскости, или не в плоскости. Предполагается, что морщина 52 расположена между актуатором и датчиком. При возбуждении актуатора к коже будет приложена боковая сила, действующая в плоскости и вызывающая ее оттягивание в направлении, показанном стрелкой.
В зависимости от размера морщины 52 (и в зависимости от того, имеется ли вообще морщина или нет) будут получены разные кривые зависимости выходного сигнала датчика от напряжения возбуждения. Фиг.11 показывает ряд различных иллюстративных кривых, соответствующих разным вариантам морщин, при этом ось x показывает напряжение на актуаторе, и ось y показывает выходной сигнал датчика.
В случае, когда имеется морщина между датчиком 16 и актуатором 14, датчик сначала регистрирует нулевой выходной сигнал (или по меньшей мере очень слабый выходной сигнал), пока морщина 52 «разглаживается». После полного «разглаживания» морщины выходной сигнал датчика быстро увеличивается вследствие упругости, присущей коже. Напряжение на актуаторе (то есть смещение), необходимое для полного «разглаживания» морщины («пороговое значение»), характеризует размер морщины (ширину, глубину, объем).
Это проиллюстрировано на фиг.11, на которой кривые 64 и 66 показывают кривые выходного сигнала, соответствующие соответственно меньшей или большей морщинам 52. В каждом случае выходной сигнал датчика остается близким к нулевому вплоть до заданного порогового напряжения. Когда это пороговое значение будет достигнуто, выходной сигнал датчика начинает увеличиваться. Пороговое напряжение для линии 66 тренда большей морщины проиллюстрировано на графике стрелкой 68. Меньшая морщина имеет меньшее пороговое напряжение.
Кривая 62 соответствует случаю, в котором отсутствует какая-либо морщина. Как показано, в данном случае выходной сигнал датчика просто увеличивается при увеличении напряжения без какой-либо начальной задержки или паузы.
При анализе полученной кривой зависимости выходного сигнала датчика от напряжения возбуждения можно оценить наличие и/или размер морщины.
Фиг.12 иллюстрирует дополнительный иллюстративный способ функционирования в соответствии с вариантами осуществления изобретения. Используется конструкция, которая включает в себя два воздействующих элемента 14, выполненных с возможностью вызывания деформаций не в плоскости в воспринимающей поверхности 34, и чувствительный элемент 16, расположенный между двумя актуаторами/воздействующими элементами и выполненный с возможностью измерения давления и/или силы, действующих со стороны воспринимающей поверхности не в плоскости, а в направлении вверх к датчику.
Эта конструкция фактически представляет собой расширение возможностей иллюстративного способа измерения, проиллюстрированного со ссылкой на фиг.4, при этом два деформирующих актуатора 14 предусмотрены вместо одного.
Фиг.12а показывает исходное неактивное состояние. Фиг.12b иллюстрирует возбуждение обоих актуаторов 14 в случае относительно более жесткой кожи. Фиг.12с иллюстрирует возбуждение обоих актуаторов 14 в случае относительно менее жесткой кожи.
В случае более жесткой кожи (фиг.12b) возбуждение обоих актуаторов 14 вызывает большое падение давления, определяемое датчиком 16. Действительно, фиг.12b показывает крайний случай, в котором кожа полностью отделена от датчика, что, следовательно, приводит к падению давления на 100%. Это фактически представляет собой такой же результат, какой ожидается получить в иллюстративном способе по фиг.4, но с бóльшим общим вызванным падением давления.
В случае менее жесткой кожи (фиг.12с) могут быть получены более интересные результаты. В первом примере кожа с более низкой жесткостью приведет к меньшему падению давления, измеренному датчиком 16 (как было в случае примера по фиг.4). Однако в некоторых ситуациях в действительности может быть получено результирующее повышение давления, возникающее в результате куполообразного выпирания, вызываемого приложением симметричного давления с обеих сторон.
Более гибкая кожа создает возможность, по меньшей мере частичного, изменения направления давления, приложенного актуаторами 14 в направлении вниз с обеих сторон датчика 16, на направление внутрь и вверх к датчику. Это давление в некоторых случаях может проявляться в виде давления, приложенного в направлении вверх к нижней чувствительной поверхности датчика (как показано на фиг.12с). Степень куполообразного выпирания будет зависеть от жесткости кожи. Следовательно, данная расширенная конструкция, включающая в себя два вдавливающих актуатора, позволяет получить дополнительную информацию о жесткости кожи по сравнению с конфигурацией и способом функционирования по фиг.4.
Фиг.13 показывает дополнительный иллюстративный способ функционирования для получения показателя упругости воспринимающей поверхности. Этот пример фактически представляет собой способ, «обратный» по отношению к предыдущему способу, проиллюстрированному со ссылкой на фиг.12. В данном случае используются два воздействующих элемента 14, расположенных с каждой из двух сторон центрального чувствительного элемента 16. Чувствительный элемент 16 выполнен с возможностью измерения давления и/или силы, действующих со стороны воспринимающей поверхности 34 не в плоскости, а в направлении от воспринимающей поверхности.
Каждый из актуаторов 14 выполнен с возможностью деформирования в направлении от воспринимающей поверхности 34, как проиллюстрировано на фиг.13b и 13с. Поскольку окружающая матрица держателя 8 наложена прочно на воспринимающую поверхность, эта деформация создает фактически вакуумный эффект с зазором, остающимся незаполненным, при деформировании актуатора. Этот вакуумный эффект вызывает частичное оттягивание кожи (или другой воспринимающей поверхности), расположенной ниже, вверх для заполнения части указанного зазора, созданного при деформировании. Это фактически вызывает волнистость в коже, которая приводит к опусканию зоны кожи, расположенной симметрично между двумя актуаторами, вниз. Если эта зона выровнена относительно чувствительного элемента 16, данное опускание будет обнаружено как уменьшение силы или давления, приложенной (-го) в направлении вверх.
Величина измеренного падения давления будет зависеть от жесткости кожи 34. Фиг.13b показывает случай с образцом жесткой кожи. В данном случае опускание в центральной зоне кожи мало, и поэтому измеренное падение давления мало. Фиг.13с показывает случай менее жесткой кожи. В этом случае падение давления значительно больше. При анализе величин выходных сигналов датчика можно получить показатель упругости или жесткости кожи.
В других примерах датчик 16 может представлять собой датчик смещения вместо датчика давления или силы.
Любой(-ая) из вышеописанных способов и конфигураций может быть с успехом включен(-а) или реализован(-а) в любом иллюстративном варианте осуществления изобретения. В некоторых случаях множество различных способов могут быть реализованы одновременно, или контроллер может быть выполнен с возможностью переключения между разными способами для получения различных вариантов измерения.
Первый иллюстративный вариант осуществления устройства по фиг.1, описанный выше в предыдущих частях, иллюстрирует самый простой случай по настоящему изобретению, в котором предусмотрена конструкция только из трех элементов взаимодействия с поверхностью. Однако идея изобретения позволяет предпочтительно расширить возможности при охвате конструкций, включающих в себя любое число различных элементов, расположенных в соответствии с любой заданной схемой или конфигурацией. Более сложные конфигурации могут обеспечить возможность получения набора более глубоких или более подробных данных измерений.
Фиг.14 показывает, например, первую альтернативную иллюстративную конструкцию 10 из элементов взаимодействия с поверхностью, которая может быть включена в иллюстративные варианты осуществления. Конструкция содержит шестиугольную кольцеобразную конфигурацию из шести чувствительных элементов 16, окружающих центральный воздействующий элемент 14. Конструкция позволяет получить множество показателей упругости, соответствующих разным направлениям. Как рассмотрено выше, данные по многим направлениям позволяют получить информацию по анизотропии.
Например, один показатель упругости может быть получен для каждого участка кожи, расположенного между каждым датчиком 16 и центральным актуатором. Это может быть обеспечено посредством приведения в действие центрального датчика для вызывания деформации (в плоскости или не в плоскости в соответствии с любым из способов, описанных выше) и управления каждым из окружающих датчиков для измерения результирующего давления. В этом случае показания датчиков могут быть получены одновременно, посредством чего одновременно получают шесть показателей упругости, соответствующих шести разным направлениям.
В другом варианте конструкции по фиг.14 вместо этого может быть предусмотрена кольцеобразная упорядоченная совокупность множества актуаторов, окружающих один чувствительный элемент. Эта конструкция также позволяет получить показатели упругости для каждого из участков кожи, расположенных между каждым из актуаторов и центральным датчиком.
Однако эта альтернативная конструкция также позволяет реализовать некоторые другие из способов измерения упругости, описанных выше. Например, каждая пара А-В, С-D, E-F актуаторов может быть приведена в действие в комбинации с центральным датчиком для обеспечения измерения в соответствии со способом, описанным выше со ссылкой на фиг.12.
В случае, если предусмотрен соответствующий датчик (датчик, выполненный с возможностью измерения как положительных, так и отрицательных давлений), может быть дополнительно реализован способ измерения в соответствии с примером по фиг.8.
В случае, если предусмотрены соответствующие актуаторы (то есть актуаторы, выполненные с возможностью деформирования в направлении от воспринимающей поверхности), также может быть реализован способ измерения по фиг.13. Множество различных видов актуаторов могут быть предусмотрены для обеспечения возможности реализации множества данных различных способов.
Несмотря на то, что в качестве примера проиллюстрирована шестиугольная конструкция, с равным успехом может быть использована любая конфигурация, например, прямоугольная, пятиугольная или любая другая правильная или неправильная форма или конфигурация. Шестиугольная конструкция обеспечивает преимущество, заключающееся в создании возможности получения множества показателей, соответствующих разным направлениям, при этом также обеспечивается хорошая двумерная сотовая конфигурация между соседними конструкциями, посредством чего создается возможность расширения конструкции до произвольного размера.
В дополнительных примерах форма или размер каждого элемента, предназначенного для взаимодействия с поверхностью могут изменяться, или шаг между соседними элементами изменяется на протяженности конструкции.
Как отмечено выше, конструкция из датчиков и актуаторов может быть расширена до любого произвольного заданного размера. Фиг.15 показывает иллюстративную конструкцию из множества сотообразных шестиугольных конфигураций из датчиков 16 и актуаторов 14.
Конструкция фактически содержит множество конструкций по фиг.14. Каждая пара соседних шестиугольных «ячеек» или конфигураций имеет два общих чувствительных элемента из их шести чувствительных элементов. Это совместное использование элементов приводит к эффективному использованию измерительных ресурсов, что позволяет получить большие количества различных показателей упругости при использовании уменьшенного общего числа чувствительных компонентов.
Контроллер может управлять любой произвольно выбранной парой из датчика и актуатора в конструкции 10 для обеспечения соответствующего измерения упругости. Это позволяет получить большие количества показателей не только для различных направлений, но и также на различных расстояниях и для различных локальных мест.
Фиг.16 и 17 иллюстрируют использование различных иллюстративных выбранных комбинаций элементов в конструкции 10 по фиг.15 для обеспечения возможности получения показателей упругости, соответствующих разным расстояниям на воспринимающей поверхности. Выделенные жирными линиями элементы представляют собой элементы, активное управление которыми осуществляется контроллером.
Как показано на фиг.16, первоначальный набор измерений может быть выполнен между центральным актуатором 14 и каждым из шести датчиков 16, непосредственно окружающих его. Как только данные показатели будут получены, шесть датчиков, расположенных через один «слой» снаружи от первого шестиугольного кольца, могут быть использованы в сочетании с центральным актуатором для получения дополнительных шести показателей упругости, соответствующих тому же множеству направлений, но на большем расстоянии.
Данные примеры представляют собой только два иллюстративных способа функционирования или возбуждения, и очевидно, что любая произвольная комбинация или конфигурация элементов может быть задействована для получения различных множеств измерений. Например, могут быть приведены в действие отдельные пары элементов или кольца или конфигурации из чувствительных элементов, соответствующие не шестиугольной форме. Линии из множества элементов могут быть использованы для множества измерений, или множество линий могут быть использованы одновременно или последовательно.
В соответствии с любой иллюстративной конструкцией множество различных показателей упругости в некоторых примерах могут быть усреднены или скомбинированы иным образом для получения средних или укрупненных показателей упругости для заданной зоны. Например, множество показателей для различных направлений могут быть усреднены для получения одного показателя упругости для конкретной области или зоны.
Как кратко рассмотрено выше, применение измерения и возбуждения на основе электроактивных полимеров позволяет получить элементы с двумя функциями, предназначенные для взаимодействия с поверхностью при этом каждый элемент выполнен с возможностью функционирования или в качестве актуатора, или в качестве датчика в зависимости от потребности. Использование таких двунаправленных элементов позволяет получить набор значительно более глубоких данных с помощью отдельно взятой конструкции из элементов по сравнению с тем, который был бы возможен в ином случае. Это обусловлено тем, что двунаправленные элементы позволяют реализовать произвольные комбинации актуаторов и датчиков.
Такая двойная функциональность также может быть реализована в альтернативных примерах посредством добавления специально предусмотренной функциональной способности к измерению для одного или более актуаторов. Это может быть обеспечено, например, посредством добавления датчика давления (или силы, или изгиба) к актуатору. В одном или более примерах такое измерительное устройство или чувствительный элемент может быть прикреплено (прикреплен) под актуатором на нижней поверхности актуатора, обращенной к воспринимающей поверхности. Это обеспечило бы возможность выполнения измерения там, где желательно, но без обязательного вмешательства в функцию возбуждения. Такой датчик в примерах может состоять из резистивного, емкостного или пьезоэлектрического гибкого пленочного элемента, который может быть прикреплен к актуатору, например, посредством использования адгезива или посредством прямой печати на актуаторе.
Несмотря на то, что актуатор с двумя функциями выполнен с возможностью осуществления или измерения, или оказания воздействия, данные две функции не будут использоваться одновременно. Добавленная функциональная способность создает преимущества только за счет того, что она обеспечивает возможность произвольного переключения между двумя разными способами функционирования.
В соответствии с одним или более иллюстративными вариантами осуществления один или более из элементов взаимодействия с поверхностью может быть предпочтительно выполнен с возможностью измерения температуры. Упругие свойства кожи сильно зависят от температуры. Это проиллюстрировано на фиг.18, которая показывает 5 различных иллюстративных кривых зависимости напряжений от деформаций для образцов кожи, при этом каждая кривая соответствует отличной от других температуре кожи. Ось x показывает напряжение (в МПа), и ось y показывает деформацию. Кривые - в порядке от самой верхней до самой нижней - соответствуют температурам кожи, составляющим соответственно 10°С, 15°С, 40°С, 50°С и 60°С.
Включение измерения температуры может создать возможность корректировки показателей упругости с учетом температуры и, следовательно, получения более точных и надежных результатов.
Измерение температуры может быть обеспечено непосредственно при использовании актуаторов на основе электроактивных полимеров, поскольку они обладают способностью измерять температуру одновременно с возбуждением. В примерах это может быть обеспечено посредством наложения низкоамплитудного сигнала переменного тока, предназначенного для определения температуры, на сигнал постоянного тока большой величины вызывания возбуждения. Соответствующий сигнал переменного тока может вызвать изменение демонстрируемого полного сопротивления на элементе из электроактивного полимера в зависимости от температуры, при которой выполняется возбуждение (а также подача управляющего сигнала постоянного тока).
Процесс калибровки может быть выполнен заранее перед работой, при этом индуктивное сопротивление на элементе из электроактивного полимера измеряют для каждого из подаваемых управляющих сигналов постоянного тока из ожидаемого возможного диапазона при каждой из различных температур из заданного диапазона. Соответственно, может быть создана справочная таблица соответствующих демонстрируемых полных сопротивлений для поданного сигнала постоянного тока при каждой температуре, отличной от других. Эта справочная таблица может быть использована при функционировании вариантов осуществления устройства для определения расчетной температуры элемента из электроактивного полимера на основе измеренного полного сопротивления и при известном поданном управляющем сигнале постоянного тока.
Кроме того, может быть предпочтительным получение показателей упругости кожи при некотором диапазоне различных температур. Характеристики упругости кожи в зависимости от температуры обеспечивают набор более глубоких данных, чем измерение только при одной температуре.
Для осуществления этого в соответствии с одним или более иллюстративными вариантами осуществления нагревательный элемент может быть встроен вместе с одним или более из актуаторов, например, прикреплен за актуатором, что позволяет нагревать актуатор и кожу под ним.
В этих примерах температура может быть измерена так же, как указано выше, и ряд измерений упругости может быть выполнен при различных температурах для обеспечения анализа упругости в зависимости от температуры.
В альтернативном варианте нагревательный элемент может быть размещен перед актуатором (на стороне, обращенной к коже). Однако в некоторых случаях это может повлиять на оказание воздействия, обеспечиваемое актуатором, из-за предотвращения плотного контакта между актуатором и кожей.
Нагревательный/охлаждающий элемент (такой как элемент Пельтье) может быть использован в некоторых примерах для более точного регулирования температуры.
Кроме того, функциональная способность к измерению температуры может быть использована для определения тепловых свойств кожи. Например, измерение температуры может создать возможность определения положения одного или более анатомических элементов (таких как артерии). Например, в случае определения положения артерии может быть определено различие в теплопроводности кожи. Теплопроводность будет выше вблизи артерии рядом с поверхностью кожи вследствие переноса тепла текущей кровью. При отслеживании уменьшения температуры в каждом датчике после выключения нагревательного элемента могут быть определены зоны с самой высокой теплопроводностью. Это может указать на наличие артерии под поверхностью кожи.
Артерия или другой анатомический элемент может быть зоной, представляющей интерес, например, при выполнении измерений упругости.
Использование множества выходных сигналов датчиков (как описано в вышеприведенных примерах) может создать возможность получения более точных результатов за счет обеспечения возможности устранения шума посредством вычисления одного или более дифференциальных выходных сигналов датчиков. Например, дифференциальный выходной сигнал датчика может быть рассчитан следующим образом:

где Sm и Sn представляют собой выходные сигналы датчиков, соответствующие одному и тому же переданному сигналу, генерированному одним и тем же актуатором и измеренному соответственно каждым из датчиков m и n.

Области применения вариантов осуществления изобретения широки и разнообразны.
Изобретение применимо в общем случае в области анализа поверхности. Ряд отраслей промышленности могут получить преимущество от обеспечиваемой изобретением, улучшенной способности к измерению и анализу упругости проходящих в боковом направлении участков воспринимающей поверхности, которые проходят в множестве направлений. Настоящее изобретение позволяет определять и анализировать анизотропию упругости поверхности в боковом направлении.
Иллюстративные применения могут включать проверку упругости тканей, например, таких как ткани для одежды, ковров, сидений или других мебельных/декоративных тканей, таких как шторы. Способность к анализу упругости с большей проработкой и детализацией может быть полезной, например, при оценке вероятного срока службы тканей или материалов, используемых в таких применениях. Например, устройство может быть использовано для оценки упругости поверхности в различных линейных зонах участка ткани для стула/кресла. Это может создать возможность оценки вероятных зон наибольшего износа или деформации в материале и вероятного срока полезного использования также на основе типового распределения массы/веса людей, сидящих на стуле/кресле. Зоны, которые согласно прогнозу, будут подвергаться наибольшей деформации, могут быть упрочнены или утолщены в такой степени, которая зависит от показателей упругости, полученных при использовании вариантов осуществления изобретения.
Аналогичным образом, в случае применения для материалов для штор может быть, например, целесообразной оценка упругости материала в различных направлениях для определения того, в каком направлении разрезать ткань для обеспечения наименьшего растягивания штор, вызываемого гравитацией. Аналогичным образом, также имеются применения для материалов, используемых в широком ряде промышленных и торговых зон, в которых упругость материала в плоскости имеет важное значение при его использовании.
Также известно, что анализ упругости шкур животных представляет собой полезное средство, и обеспечиваемая изобретением, дополнительная возможность определения анизотропии упругости на различных участках шкуры может представлять собой ценную дополнительную функциональную возможность.
Помимо вышеприведенных примеров, существует широкий ряд применений, относящихся, в частности, к анализу кожи.
Иллюстративные устройства, особенно в случае выполнения их, например, в виде тонкой гибкой накладки, будут пригодными для применений в косметологии. Измерения упругости кожи могут быть использованы для последующих рекомендаций по терапии кожи, в особенности устранения влияния старения на упругость кожи. Другими причинами (помимо старения) могут быть генерализованный эластолиз/синдром вялой кожи, полиформная эритема, вред от солнечных лучей и потеря веса.
Кроме того, заболевания могут быть связаны с изменениями упругости. Кожа обычно растягивается и возвращается к ее нормальному состоянию, если она хорошо увлажнена и является здоровой. Сверхупругая кожа растягивается с превышением нормального предела. Хотя обычно это не является причиной для беспокойства, сверхупругая кожа может являться симптомом многих заболеваний и расстройств. Например, можно указать синдром Элерса-Данлоса, синдром Марфана, синдром ломких костей и синдром Аарскога.
Дополнительное применение может быть в области оценки подозрительных родимых пятен или других дефектов кожи в качестве средства для того, чтобы отличить их от незлокачественных дефектов. В этом случае шаг актуаторов и датчиков может быть малым для обеспечения возможности охвата дефекта кожи, имеющего малый размер, множеством данных элементов.
Предложенные варианты осуществления могут быть использованы в случаях применения, в которых должны быть определены характеристики упругих материалов.
Помимо применений, указанных выше, потенциальные применения включают:
- определение положений артерий для мониторинга пикового градиента (PPG) кровяного давления/сердечного ритма. Могут быть подвергнуты возбуждению актуаторы, расположенные над артерией, в которой кровяное давление должно быть измерено;
- информация об изменчивости упругости в зоне кожи лица может предпочтительно использоваться для адаптации частоты вращения или скорости колебаний бритвы для более плавного бритья (например, группа минидатчиков на основе электроактивных полимеров может быть включена в контактирующую с кожей часть бритвы);
- информация об упругости может быть использована для оптимизации местного нанесения на кожу, например, увлажнителей или других кремов;
- трение о кожу/поверхностное трение может быть измерено посредством перемещения иллюстративного устройства по коже для определения характеристик изменения поверхностного трения в различных местах. Эта информация может быть использована для оптимизации, например, косметического ухода.
Известны материалы, пригодные для компонента из электроактивного полимера. Электроактивные полимеры включают следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, композиты из ионных полимеров и металлов, ионные гели и полимерные гели, но не ограничены ими.
Подкласс электрострикционных полимеров включает среди прочего:
поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает среди прочего:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает среди прочего:
полипиррол, поли-3,4-этилендиокситиофен, поли(р-фениленсульфид), полианилины.
Ионные устройства могут базироваться на композитах из ионного полимера и металла (IPMC) или сопряженных полимерах. Композит из ионного полимера и металла (IPMC) представляет собой синтетический композиционный наноматериал, который демонстрирует характеристики искусственной мышцы при поданном напряжении или приложенном электрическом поле.
Более подробно, композиты из ионного полимера и металла состоят из ионного полимера, подобного Nafion или Flemion, на поверхности которого химическим или физическим методом нанесено покрытие из проводящих материалов, таких как платина или золото, или из электродов на углеродной основе. При подаче напряжения миграция и перераспределение ионов, вызываемые напряжением, поданным на полоску из IPMC, приводят к деформации изгиба. Полимер представляет собой набухшую в растворителе, ионообменную полимерную мембрану. Поле вызывает перемещение катионов к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в зоне катода приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибанию по направлению к аноду. Перемена полярности поданного напряжения приводит к изгибу в противоположном направлении.
Если электроды, осажденные гальваническим способом, расположены с несимметричной конфигурацией, поданное напряжение может вызывать все виды деформаций, таких как кручение, свертывание, спиральное закручивание, изгибание и деформацию несимметричного изгиба.
Во всех данных примерах могут быть предусмотрены дополнительные пассивные слои для оказания воздействия на электрические и/или механические характеристики слоя электроактивного полимера, проявляющиеся в качестве реакции на приложенное электрическое поле.
Компонент каждого устройства, образованный из электроактивного полимера, может быть размещен между электродами. Электроды могут быть растягивающимися, чтобы они соответствовали деформации электроактивного полимерного материала. Материалы, пригодные для электродов, также известны и могут быть выбраны, например, из группы, состоящей из тонких металлических пленок, таких как пленки из золота, меди или алюминия, или органических проводящих материалов, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (РЕТ), например, с использованием алюминиевого покрытия.
Изобретение может применяться во многих областях применения электроактивных полимеров и фотоактивных полимеров, включая примеры, в которых пассивная матрица в виде упорядоченной совокупности актуаторов или датчиков, или комбинации датчиков и актуаторов представляет интерес.
Актуаторы из электроактивных полимеров, например, обеспечивают специфические преимущества главным образом вследствие малого форм-фактора, гибкости и высокой плотности потока энергии. Следовательно, электроактивные полимеры и фоточувствительные полимеры могут быть легко включены в мягкие, имеющие трехмерную форму и/или миниатюрные изделия и интерфейсы. Примерами таких применений являются:
средства косметического ухода за кожей, такие как устройства для возбуждения кожи в виде накладок на кожу, образованных на основе чувствительного полимера, которые обеспечивают постоянное или циклическое растягивание кожи для натяжения кожи или для уменьшения морщин;
аппараты искусственного дыхания с лицевой маской для пациента, которая имеет активную прокладку или уплотнение на основе чувствительного полимера, для приложения знакопеременного нормального давления к коже, которое уменьшает или предотвращает красные отметины на лице;
электробритвы с адаптивной бритвенной головкой. Высота поверхностей, контактирующих с кожей, может быть отрегулирована при использования актуаторов из чувствительных полимеров для воздействия на баланс между плотностью прилегания и раздражением;
устройства для очистки полости рта, такие как зубная нить с воздушной струей, предусмотренная с динамическим приводом сопла для увеличения зоны доступа струи особенно в пространствах между зубами. В альтернативном варианте зубные щетки могут быть предусмотрены с активированными пучками щетинок;
бытовые электронные устройства или сенсорные панели, которые обеспечивают локальную тактильную обратную связь посредством упорядоченной совокупности датчиков из чувствительных полимеров, которые встроены в пользовательский интерфейс или рядом с ним;
катетеры с управляемым наконечником для обеспечения возможности легкой навигации в извилистых кровеносных сосудах.
Другие изменения раскрытых вариантов осуществления могут быть понятными для специалистов в данной области техники и могут быть осуществлены ими при реализации заявленного изобретения на практике на основе изучения чертежей, раскрытия изобретения и приложенной формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, и использование единственного числа не исключает множества. Само по себе то, что определенные меры приведены в отличающихся друг от друга, зависимых пунктах формулы изобретения, не указывает на то, что комбинация данных мер не может быть с успехом использована.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
Реферат
Группа изобретений относится к медицине, а именно к устройству и способу анализа упругости воспринимающей поверхности на различных линейных участках. Устройство содержит держатель и конструкцию из трех или более элементов взаимодействия с поверхностью. Указанные элементы способны осуществлять только одну из функций оказания воздействия или измерения давления в любой отдельно взятый момент времени. Элементы взаимодействия пространственно отделены друг от друга и распределены в двух измерениях на поверхности держателя. Первый элемент осуществляет функцию оказания воздействия. Второй элемент осуществляет функцию измерения давления. Контроллер устройства соединен с элементами взаимодействия для управления первым элементом для вызывания деформации в воспринимающей поверхности в первой точке контакта, управления вторым элементом для измерения давления и/или силы, действующих со стороны воспринимающей поверхности во второй пространственно отделенной точке контакта, для определения показателя упругости воспринимающей поверхности между первой и второй точками. Контроллер управляет также дополнительными элементами взаимодействия с поверхностью одновременно с управлением вторым и/или первым элементом или для вызывания деформации в воспринимающей поверхности, или для измерения давления и/или силы в дополнительных точках контакта, чтобы посредством этого обеспечить возможность определения показателя упругости между каждой из дополнительных точек и или второй, или первой точкой контакта. Обеспечивается возможность измерения упругости на проходящих в боковом направлении участках воспринимающей поверхности между разными точками. 2 н. и 13 з.п. ф-лы, 18 ил.
Комментарии