Конфигурируемая система для оценки чувствительности субъекта к стимулу и способ ее применения - RU2746465C2
Код документа: RU2746465C2
Чертежи
























Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее раскрытие в целом относится к усилению восприятия реальности и улучшению восприятия. Более конкретно, но не исключительно, настоящее раскрытие относится к конфигурируемой системе для оценки чувствительности субъекта к стимулу и способу ее применения.
УРОВЕНЬ ТЕХНИКИ
[0002] Принцип опоры (Fulcrum Principle) представляет собой явление, которое происходит в различных системах человека. Принцип опоры позволяет улучшать способность к обнаружению сигнала ниже порога посредством введения в системы или стохастического, или детерминированного сигнала. Поэтому представляется, что принцип опоры является интересным и привлекательным явлением для применения в сенсорных системах, для того чтобы улучшать чувствительность сенсорных, рефлекторных и/или моторных механизмов субъекта. Рассмотрение принципа опоры можно найти в документе "On The Physical Fundamentals Of Human Perception And Muscle Dynamics: From The Fulcrum Principle To Phonons", J.E. Lugo et ai, 11-я Международная конференция по проблемам вибрации, Z. Dimitrovova et al. (редакторы), Лиссабон, Португалия, 9-12 сентября 2013 года, раскрытие которого включено в настоящий документ посредством ссылки во всей полноте.
[0003] Действительно, было показано, что, когда слабый сенсорный стимул (возбуждающий сигнал), прикладываемый к индивидууму, для стимуляции одних сенсорных, рефлекторных и/или моторных механизмов, добавляют ко вторым сенсорным, рефлекторным и/или моторным механизмам при соответствующей величине амплитуды стохастического или детерминированного сигнала (сигнала содействия), то слабый сенсорный стимул может быть обнаружен и, таким образом, может активировать реакции данных конкретных сенсорных, рефлекторных и/или моторных механизмов в ответ на прикладываемый слабый сенсорный стимул.
[0004] Например, публикация патента США № 2011/0005532 A1, озаглавленная "Method and System for Improving a Subject's Sensory, Reflex and/or Motor Mechanisms via Auditory, Tactile or Visual Stimulations", раскрытие которой включено в настоящий документ посредством ссылки во всей полноте, описывает способ и систему для улучшения чувствительности первого сенсорного, рефлекторного и/или моторного механизма субъекта посредством стимуляции второго сенсорного, рефлекторного и/или моторного механизма субъекта. Для этой цели шум подают на второй сенсорный, рефлекторный и/или моторный механизм для улучшения чувствительности первого сенсорного, рефлекторного и/или моторного механизма вследствие кросс-модальных стохастических резонансных взаимодействий.
[0005] Остается потребность в улучшении определения, управления и гибкости стимуляции, подаваемой на второй сенсорный, рефлекторный и/или моторный механизм субъекта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] В соответствии с настоящим раскрытием предложена система для оценки чувствительности субъекта к стимулу. В данной системе первый канал действия выполнен с возможностью создания стимула первого типа для субъекта. Канал реакции выполнен с возможностью приема ответа от субъекта. Сигнальный путь соединен с первым каналом действия и с каналом реакции. Контроллер выполнен с возможностью установления по меньшей мере одного из первого контура преобразования, включающего в себя первый канал действия и образующего путь, оканчивающийся в сигнальном пути, и первого контура канала, включающего в себя первый канал действия, образующего путь через сигнальный путь и оканчивающегося в первом блоке эталона.
[0007] В соответствии с настоящим раскрытием также предложен способ оценки чувствительности субъекта к стимулу. Данный способ использует систему для оценки чувствительности субъекта к стимулу. В системе первый канал действия выполнен с возможностью создания стимула первого типа для субъекта. Канал реакции выполнен с возможностью приема ответа от субъекта. Сигнальный путь соединен с первым каналом действия и с каналом реакции. Контроллер выполнен с возможностью установления по меньшей мере одного из первого контура преобразования, включающего в себя первый канал действия и образующего путь, оканчивающийся в сигнальном пути, и первого контура канала, включающего в себя первый канал действия, образующего путь через сигнальный путь и оканчивающегося в первом блоке эталона. Первый канал действия используют в качестве источника возбуждающего сигнала для стимуляции первого сенсорного, рефлекторного и/или моторного механизма субъекта. Второй канал действия используют в качестве источника сигнала содействия для стимуляции второго сенсорного, рефлекторного и/или моторного механизма субъекта. Канал реакции используют для измерения физиологического ответа первого сенсорного, рефлекторного и/или моторного механизма.
[0008] В соответствии с настоящим раскрытием также предложена система для улучшения чувствительности первого сенсорного, рефлекторного и/или моторного механизма субъекта. В данной системе источник сигнала содействия стимулирует второй сенсорный, рефлекторный и/или моторный механизм субъекта. Измеряет физиологический ответ первого сенсорного, рефлекторного и/или моторного механизма. Контроллер регулирует уровень сигнала содействия на основании измеренного физиологического ответа. Регулировка уровня сигнала содействия улучшает чувствительность первого сенсорного, рефлекторного и/или моторного механизма субъекта благодаря взаимодействиям на основе принципа опоры.
[0009] Вышеизложенные и другие признаки станут более понятными после прочтения следующего неограничивающего описания их иллюстративных вариантов осуществления, приведенного только в качестве примера, со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Варианты осуществления настоящего раскрытия будут описаны только в качестве примера, со ссылкой на прилагаемые чертежи, на которых:
[0011] фигура 1 показывает упрощенные блок-схемы системы с обратной связью и системы с прямой связью;
[0012] фигура 2 представляет собой блок-схему, иллюстрирующую систему для стимуляции субъекта в соответствии с вариантом осуществления;
[0013] фигура 3 представляет собой пример прямого контура с одноточечным стимулом, сконфигурированного с чистым проходным иммитансом, в системе в соответствии с фигурой 2;
[0014] фигура 4 представляет собой пример прямого контура с распределенным стимулом, сконфигурированного с чистым проходным иммитансом, в системе в соответствии с фигурой 2;
[0015] фигура 5 представляет собой древовидную схему, показывающую классификацию контуров настоящего раскрытия;
[0016] фигура 6 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура канала для одноточечного стимула;
[0017] фигура 7 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура преобразователя для одноточечного стимула;
[0018] фигура 8 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура канала для распределенного стимула;
[0019] фигура 9 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура преобразователя для распределенного стимула;
[0020] фигуры 10A, 10B и 10C показывают различные примеры конфигураций контуров системы в соответствии с фигурой 2;
[0021] фигура 11 представляет собой блок-схему, иллюстрирующую пример применения системы в соответствии с фигурой 2 для стимуляции субъекта;
[0022] фигура 12 представляет собой иллюстрацию контуров преобразователя в применении в соответствии с фигурой 11;
[0023] фигура 13 представляет собой иллюстрацию контуров канала в применении в соответствии с фигурой 11;
[0024] фигура 14 представляет собой иллюстрацию контура интерфейса в применении в соответствии с фигурой 11;
[0025] фигура 15 представляет собой иллюстрацию адаптивного контура в применении в соответствии с фигурой 11;
[0026] фигура 16 представляет собой схему последовательности операций способа улучшения чувствительности первого сенсорного, рефлекторного и/или моторного механизма субъекта в соответствии с вариантом осуществления;
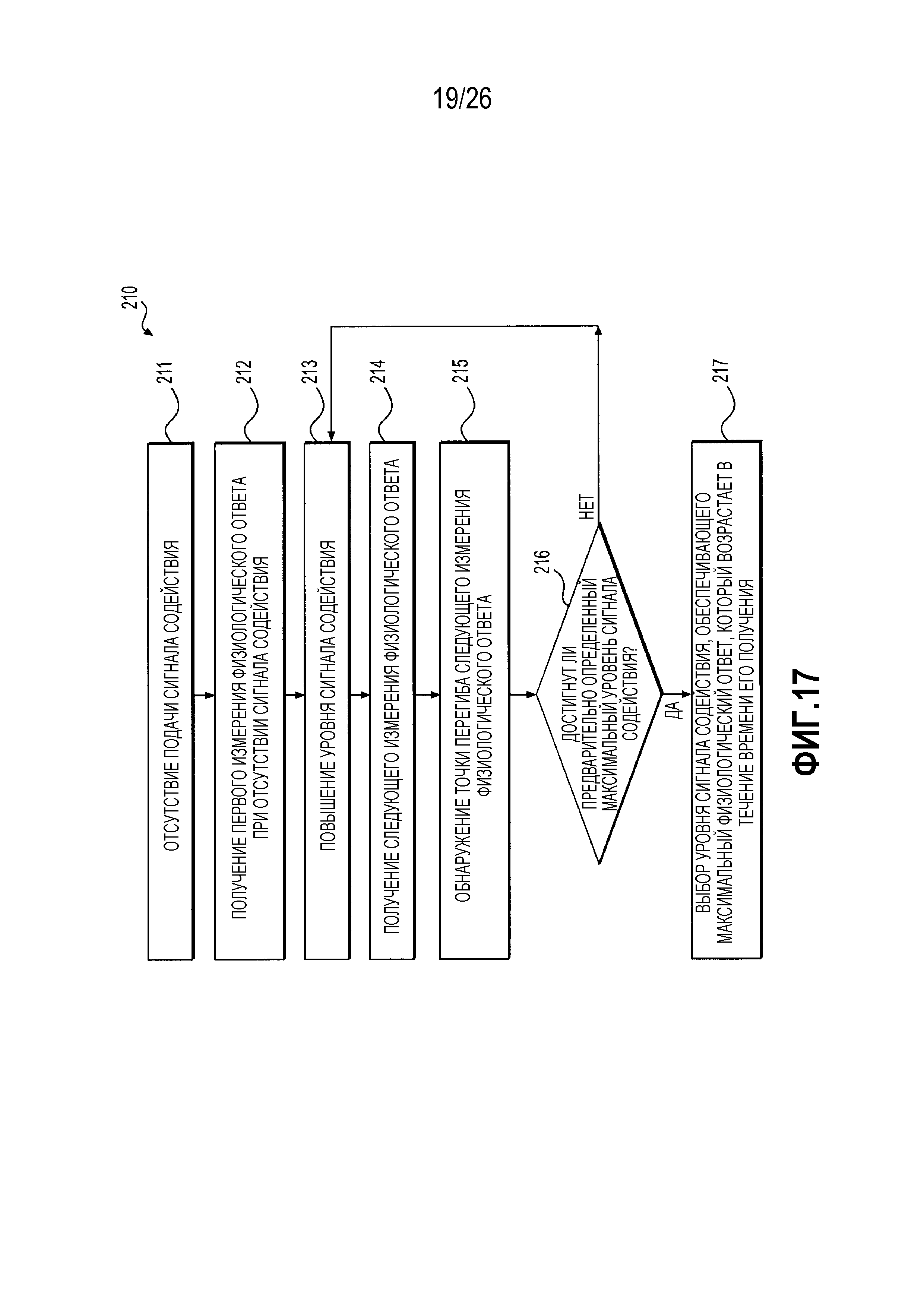
[0027] фигура 17 представляет собой схему последовательности операций подробной последовательности для регулировки уровня сигнала содействия на основании измеренного физиологического ответа в соответствии с другим вариантом осуществления;
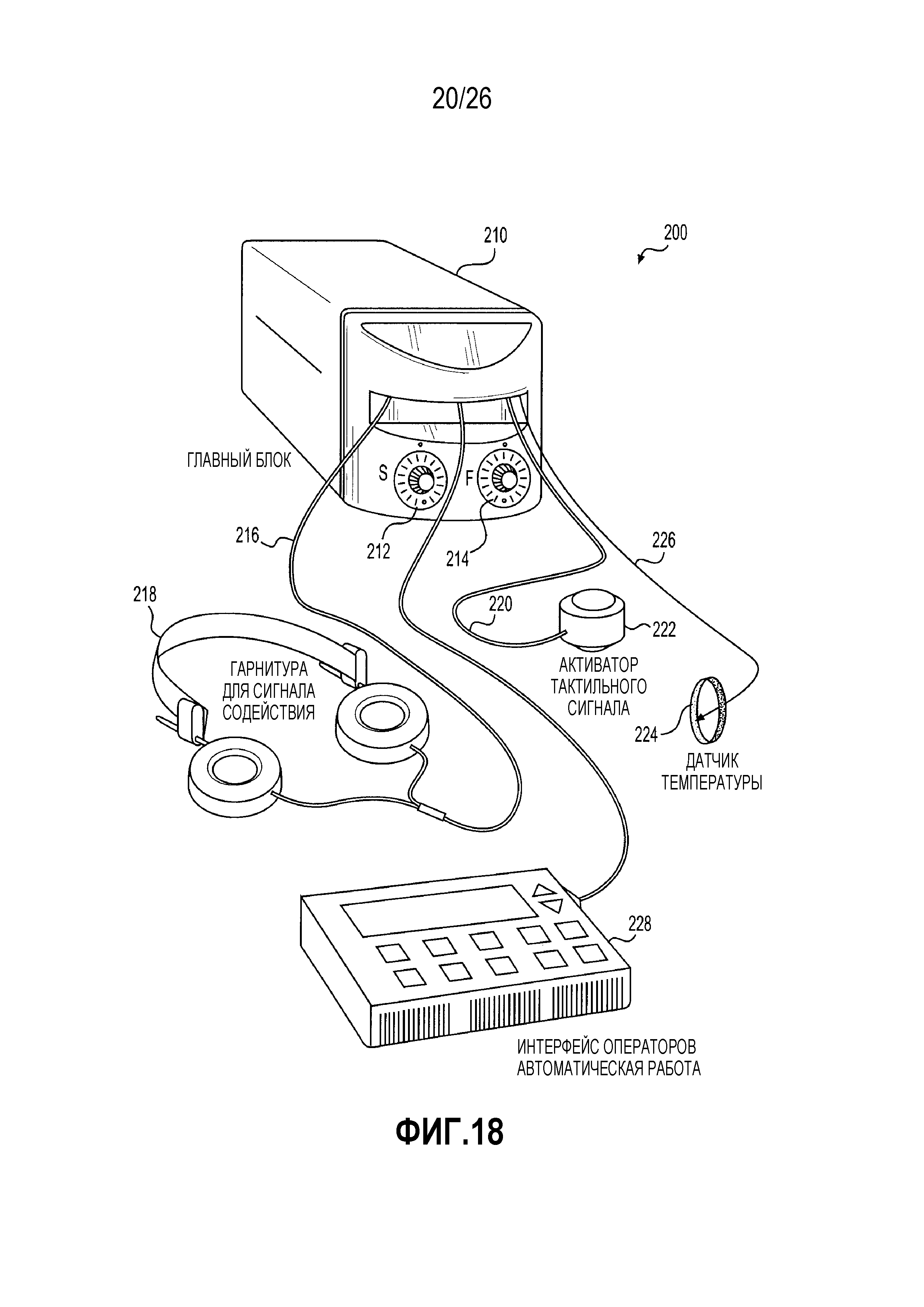
[0028] фигура 18 представляет собой общий вид реализации нейротюнера в соответствии с вариантом осуществления; и
[0029] фигуры 19-24 предоставляют экспериментальные результаты, полученные с использованием нейротюнера в соответствии с фигурой 18.
[0030] Одинаковые ссылочные позиции обозначают на различных чертежах одинаковые элементы.
ПОДРОБНОЕ ОПИСАНИЕ
[0031] Система, раскрытая в настоящем документе, позволяет исследовать пределы воспринимаемых ощущений тестируемого субъекта, при этом улучшая адаптацию, обучаясь и/или позволяя приобретать улучшенные способности и контролировать восприятие чувств субъектом. Система использует различные типы контуров стимула, включая комбинированный, однопроходный с усилением, с обратной связью, с прямой связью, с адаптивной обратной связью или с биологической обратной связью контуры стимула. Кроме того, настоящее раскрытие предлагает способ и систему для улучшения сенсорных, рефлекторных и/или моторных механизмов субъекта с помощью сенсорной стимуляции посредством конфигурируемого интерфейса контура стимула. Контуры стимула могут размыкаться или замыкаться автоматически с помощью стохастических или детерминированных сигналов для стабилизации и поддержания субъекта в состоянии оптимальных характеристик.
[0032] Соответственно, конфигурируемый интерфейс делает возможным автоматический выбор различных экспериментальных конфигураций. Интерфейс поддерживает несколько типов конфигурации, определяемых контурами стимула, которые желательны для выполняемого эксперимента.
[0033] На чертежах фигура 1 показывает упрощенные блок-схемы системы с обратной связью и системы с прямой связью. Контуры стимула могут быть определены в зависимости от создаваемого стимула и в зависимости от конкретного эффекта, оказываемого на восприятие или обучение субъекта. Контуры, стабилизирующее обратной связью действие между определенными точками, с компенсацией с прямой связью или без нее, могут также быть определены на уровне различных блоков, включая уровень активаторов, уровень канала, включая несколько каналов, или включая самого субъекта. Контуры могут быть реализованы с использованием аналоговых сигналов, цифровых сигналов или их смеси с применением конвертеров при необходимости.
[0034] Контуры могут быть определены как контуры реального времени (RTL), контуры замедленного действия (DL), когда усиление контура дает задержку, контуры с компенсацией задержки (DCL), которые компенсируют время, необходимое для обработки сигнала, для создания нескольких стимулов одновременно, тактовые контуры (CL), в которых действие контура задерживается предварительно установленным случайным или последовательным образом, и тому подобное. Задержка происходит внутри усилителя или специального дополнительного блока (не показан). Главной функцией задержки является компенсация разницы между временами прохождения по каналам. Все контуры, определенные в настоящем документе, могут иметь задержку.
[0035] Конфигурации замкнутых контуров позволяют стабилизировать связи между параметрами электрической цепи в соответствии с переменной измерений и переменной обратной связи. Переменные измерений и обратной связи могут, например, представлять собой значения тока или напряжения. Стабилизированную величину, например усиление по напряжению, используют в качестве эталона в двух определенных точках, в которых сигнал сначала оценивают, а затем возвращают топологически в цепь, таким образом замыкая контур. Если желательно добавить в определенный канал стимула стабилизацию замкнутой обратной связью, в качестве типичного примера отрицательной обратной связи, производят оценку выходного сигнала от канала действия в первой точке из двух точек с использованием датчика. Можно использовать датчик электрической сети, микрофон, термометр или любой другой аналогичный датчик. Датчик подает часть оцененного выходного сигнал в усилитель обратной связи прохода обратной связи. Обычно, но не исключительно, усилитель обратной связи имеет усиление, составляющее меньше единицы. Выход от усилителя обратной связи вычитают из эталонного сигнала во второй точке на входе усилителя действия при прямом проходе.
[0036] Многие стандартные датчики являются скалярными датчиками. Также предусмотрено использование векторных датчиков, выход которых зависит не только от величины значения, но также от положения датчика в пространстве.
[0037] В случае прямой связи система имеет предварительно определенное поведение в присутствии внешних возмущений.
[0038] Фигура 2 представляет собой блок-схему, иллюстрирующую систему для стимуляции субъекта в соответствии с вариантом осуществления. Система 100 содержит конфигурацию из устройств 104, 105 управления, усилителей 102, приводов 106, датчиков 108, источника питания (показан на последующих фигурах), интерфейса оператора (показан на последующих фигурах) и активного устройства управления сигналом в главном блоке 110 управления, выполненного с возможностью выполнения задач, связанных с оценкой чувствительности субъекта к стимулу. Фигура 2 предлагает неограничивающий пример системы 100, имеющей два (2) канала действия и один (1) канал реакции, причем каждый канал действия и реакции включает в себя один привод 106 и один датчик 108. Фактические количества каналов действия и каналов реакции могут изменяться, и отсутствует априорный предел для данных количеств. Каждый из данных каналов выполнен с возможностью обеспечения прямого прохода (вперед) и прохода обратной связи (назад), как описано более подробно ниже в настоящем документе. Главный блок 110 управления управляет переключателями (описанными ниже в настоящем документе), которые размыкаются и замыкаются для создания конфигурации конфигурируемого сигнального пути 115. Конфигурируемый сигнальный путь 115 проходит от самого главного блока 110 управления для соединения главного блока управления с каналами действия и с каналами реакции. Устройства 104 и 105 управления могут быть реализованы в форме реле. Те реле 105, которые являются внешними для главного блока 110 управления, обычно реализуют в виде реальных физических устройств (реальные реле). Те реле 104, которые интегрированы в главный блок 110 управления, могут быть реализованы или в виде реальных физических устройств или посредством программного обеспечения (виртуальные реле).
[0039] Каналы действия управляют воздействиями системы на субъект. В примере с фигуры 2 два (2) канала действия создают слуховой стимул 120 и тактильный стимул (вибрацию) 122 для тестируемого субъекта. Данные каналы действия могут представлять собой каналы в разомкнутом контуре. В качестве альтернативы, каналы действия могут представлять собой каналы с обратной связью, реализованные на уровне канала или на уровне преобразования. Когда сигнал проходит от главного блока 110 управления к субъекту, в случае отрицательной обратной связи усиление при прямом проходе, представленном усилителем 102 (треугольник, направленный вправо), является отрицательным и имеет величину больше чем один. Поэтому усиление при проходе обратной связи, представленном усилителем 102 (треугольник, направленный влево), имеет положительное значение меньше единицы.
[0040] Каналы реакции управляют воздействиями субъекта (то есть реакциями) на систему 100. Канал реакции позволяет сигналу проходить от субъекта к главному блоку 110 управления. В примере с фигуры 2 канал реакции измеряет температуру 124 тела, которая передается в форме сигнала на главный блок 110 управления. В случае канала реакции, для отрицательной обратной связи прямым является проход от канала реакции к главному блоку 110 управления, и он имеет отрицательное усиление больше чем один, тогда как проход обратной связи имеет противоположное направление и имеет положительное усиление меньше единицы.
[0041] Для каналов действия датчики 108 оценивают изменение выходных сигналов, подаваемых на субъект. Активаторы 106 каналов действия подают эти сигналы на субъект. Соответствующие датчики 108 контролируют работу активаторов 106. Для каналов реакции датчики 108 вместо этого подают сигналы, представляющие ответы субъекта, например температуру тела, и активаторы 106 представляют компенсацию обратной связи для этих датчиков 108 для управления их эффективностью в преобразовании реакций субъекта в отношении температуры, силы, сопротивления кожи и тому подобного. Конфигурации канала действия и канала реакции не обязательно должны быть реализованы с помощью электронных цепей. В случае оборудования с переносом массы (например, нагревателей текучей среды или охладителей жидкости), механических приводов и электромагнитных устройств, пневматические интерфейсы (например, для измерения кровяного давления) могут нуждаться в регулирующих действиях или клапанах. Это примеры активаторов в канале реакции.
[0042] Можно заметить, что конфигурируемый сигнальный путь 115, образованный переключателями SW1, SW2, SW3 и SW4, которые размыкаются и замыкаются по командам от устройств 104 и 105 управления, позволяет переконфигурировать систему 100 с фигуры 2 таким образом, что канал действия может стать каналом реакции, возможно, предоставляя положительную или отрицательную обратную связь или прямую связь. Эту динамическую конфигурацию конфигурируют в соответствии с предварительно установленной программой или, в качестве альтернативы, в соответствии с ответами субъекта. Переконфигурирование может быть осуществлено в реальном времени или с задержкой. Система 100 может позволять практику находить ответы субъекта во время продолжающегося теста, принимая наиболее эффективную конфигурацию, соответствующую условиям продолжающегося теста.
[0043] Фигура 3 представляет собой пример прямого контура с одноточечным стимулом, сконфигурированного с чистым проходным иммитансом, в системе в соответствии с фигурой 2. Такие контуры, как показанный на фигуре 3, создают одноточечные стимулы (SPS). Одним примером, показанным на фигуре 3, является звуковой стимул. Другим типом SPS является точечный источник света. Фигура 4 представляет собой пример прямого контура с распределенным стимулом, сконфигурированного с чистым проходным иммитансом, в системе в соответствии с фигурой 2. Распределенный стимул может быть создан с использованием одного или нескольких активаторов. Например, вибрационный стимул может быть создан с использованием одного активатора с широкой поверхностью, как в случае фигуры 4. В качестве альтернативы, можно использовать множество одноточечных активаторов. Контуры, такие как показанные на фигуре 4, создают распределенные стимулы (DS). Фигура 4 показывает пример, в котором вибрирующие поверхности прикреплены к телу субъекта. На обеих фигурах 3 и 4 проиллюстрированные контуры представляют собой прямые контуры (DL), в которых одномодальные взаимодействия воздействуют с чистым проходным иммитансом (PTI) на одно чувство субъекта, с использованием, например, вибрирующего штырька, воздействующего на палец, или вибрирующей поверхности, воздействующей на всю ладонь руки.
[0044] Фигура 5 представляет собой древовидную схему, показывающую классификацию контуров настоящего раскрытия. Контуры могут содержать одноточечные стимулы (SPS) или распределенные стимулы (DS), как указано выше в настоящем документе. Могут быть предложены или в виде прямых контуров (DL), или в виде смешанных контуров (ML), в которых один или распределенный стимул воздействует на комбинацию чувств, например посредством создания аудио- и видеостимулов одновременно. Примеры ML приведены в настоящем документе ниже. Распределенные стимулы создают с чистым проходным иммитансом (PTI), тогда как смешанные стимулы создают с перекрестным иммитансом (CI). Примеры PTI приведены на фигурах 3 и 4, а примеры CI приведены в настоящем документе ниже. Каждый данный контур может иметь положительное или отрицательное усиление с величиной усиления в диапазоне от нуля (0) до бесконечности (∞).
[0045] фигура 6 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура канала для одноточечного стимула. Фигура 7 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура преобразователя для одноточечного стимула. Фигура 8 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура канала для распределенного стимула. Фигура 9 представляет собой конфигурацию системы в соответствии с фигурой 2, показывающую положения переключателей для контура преобразователя для распределенного стимула. Переключатели SW1, SW2, SW3 и SW4 размыкаются и замыкаются по командам от устройств 104 и 105 управления для создания различных типов контуров в пределах конфигурируемого сигнального пути 115. Эти прямые контуры сконфигурированы с чистым проходным иммитансом (PTI) (фигуры 3, 4, 6-9). Неограничивающий пример прямого контура подает аудиосигнал, образующий слуховой стимул и предполагающий слуховое восприятие.
[0046] Фигуры 8 и 9 иллюстрируют три (3) отдельных пары активатор/датчик для создания распределенных стимулов. В варианте можно использовать три (3) отдельных контура SPS для создания стимулов одинакового типа.
[0047] Фигуры 10A, 10B и 10C показывают различные примеры конфигураций контура системы 100 с фигуры 2. На этих фигурах смешанные контуры (ML) сконфигурированы с перекрестным иммитансом (CI). Они могут, например, подавать аудиосигнал, вызывающий слуховой стимул 120 и предполагающий тактильное восприятие 122, или аудиосигнал, вызывающий тактильный стимул (от присущей аудиосигналу вибрации) и предполагающий визуальное восприятие.
[0048] Переключатели SW1A, SW2A, SW3A и SW4A являются частью конфигурируемого сигнального пути 115 для первого канала действия. Переключатели SW1B, SW2B, SW3B и SW4B являются частью конфигурируемого сигнального пути 115 для первого канала действия. На фигуре 10A каналы стимула образуют разомкнутый контур, о чем свидетельствует размыкание переключателей SW4A и SW4B в путях обратной связи для этих каналов. Обеспечен канал 200 обратной связи для возврата информации об ответе субъекта. Напротив, фигуры 10B и 10C показывают замыкание переключателей SW4B и SW1B для создания каналов замкнутого контура в пределах каналов стимула, что создает пути обратной связи в пределах канала стимула в дополнение к каналу 200 обратной связи. Обе фигуры 10B и 10C показывают, что пути обратной связи в пределах каналов стимула могут состоять из контуров преобразователя или контуров канала. Фигура 10C также показывает добавление переменной T0, представляющей температуру, предоставляемую температурным датчиком, среды, окружающей субъект. Это добавление превращает систему 100 в систему с прямой связью, в которой главный блок 110 управления получает возможность изменять поведение системы в зависимости от T0. Например, система 100 может иметь возможность "узнавать", какая конфигурация является наиболее эффективной, когда изменяется T0. Система 100, следовательно, имеет возможность оценивать свою работу и соответствующим образом управлять конфигурацией.
[0049] Система 100 с фигур 10A, 10B и 10C может быть выполнена с возможностью работы в режимах разомкнутого контура или замкнутого контура, обеспечивая контуры преобразователя, контуры канала или их комбинацию с добавлением параметра для работы с прямой связью или без него. Таким образом может быть определено большое число различных конфигураций.
[0050] В варианте система 100 может создавать стимулы с использованием любого интерфейса для динамика, монитора и тому подобного. В другом варианте система 100 использует природные источники стимулов для обеспечения окружающих звуков или изображений.
[0051] Контуры могут быть сконфигурированы с широким диапазоном значений усиления положительной или отрицательной обратной связи в пределах от очень низких значений усиления положительной или отрицательной обратной связи при приближении к разомкнутому контуру или при его достижении до очень высоких значений усиления положительной (афферентной) или отрицательной (эфферентной) обратной связи. Значения усиления обратной связи могут изменяться в зависимости от предварительно определенного (последовательного, случайного и так далее) или адаптивного режимов работы.
[0052] Хотя фигуры 2, 10A, 10B и 10C иллюстрируют вариант осуществления с использованием компенсации с обратной связью (как показано на фигуре 1, верхняя часть), может быть предложен другой вариант осуществления системы 100 с компенсацией с прямой связью (как показано на фигуре 1, нижняя часть). Фигура 10C фактически показывает компенсацию как с обратной связью, так и с прямой связью.
[0053] Далее будет описана общая работа системы 100 со ссылкой на фигуры с 11 по 15. Фигура 11 представляет собой блок-схему, иллюстрирующую пример применения системы в соответствии с фигурой 2 для стимуляции субъекта. Фигура 12 представляет собой иллюстрацию контуров преобразователя в применении в соответствии с фигурой 11. Фигура 13 представляет собой иллюстрацию контуров канала в применении в соответствии с фигурой 11. Фигура 14 представляет собой иллюстрацию контура интерфейса в применении в соответствии с фигурой 11. Фигура 15 представляет собой иллюстрацию адаптивного контура в применении в соответствии с фигурой 11. Если рассмотреть сразу фигуры 11-15, неограничивающий пример показывает предоставление слухового, тактильного и визуального стимулов для субъекта, тогда как поверхностный термометр обеспечивает обратную связь от субъекта для системы 100.
[0054] Для простоты и ясности работа системы 100 описана в связи с конкретным неограничивающим примером с использованием приводов для слухового, тактильного и визуального стимулов и поверхностным термометром с настройкой на различные каналы. Участки, связанные с этими каналами, снабжены датчиками (микрофоном, акселерометром, нагревателем и датчиком света, сетью электрической обратной связи), сконфигурированными в качестве контуров обратной связи. Также предусмотрено распространение работы системы 100 на несколько одновременных стимуляций с использованием различных количеств каналов/модулей стимуляции и устройств стимуляции.
[0055] Эксперименты предварительно определяют и реализуют в виде программных средств в главном блоке 110 управления. Контур конфигурации определяют посредством конфигурируемого сигнального пути 115, которым управляет главный блок 110 управления.
[0056] Главный блок 110 управления соединен с источником 132 питания. Он оценивает несколько используемых переменных, обрабатывает статистику и управляет режимами конфигурации системы 100. Главный блок 110 управления также управляет интерфейсом 130 оператора и конфигурируемым сигнальным путем 115, который обеспечивает связь между интерфейсом 130 оператора и другими компонентами системы 100.
[0057] Конфигурируемый сигнальный путь 115, которым управляет интерфейс 130 оператора, соединенный с главным блоком 110 управления, связывает аналоговые и цифровые сигналы, которые конфигурируют контуры, определяет режимы работы системы 100, контролирует параметры каналов и устанавливает функциональные операции с участием системы 100 и тестируемого субъекта.
[0058] Блоки ввода-вывода действуют в качестве интерфейса между блоками ввода-вывода и приводами каналов или датчиками каналов.
[0059] Преобразователи ввода-вывода действуют в качестве приводов или датчиков каналов и включают, например гарнитуры, вибраторы, термометры, мониторы и тому подобное. Преобразователи ввода-вывода могут использоваться в работе с замкнутым контуром.
[0060] Интерфейс 130 оператора представляет собой интерфейс человек-машина, включающий в себя, например, монитор, клавиатуру, указательное устройство и тому подобное, которые не показаны, но хорошо известны. Его монитор также может быть использован в качестве активатора визуальных стимулов.
[0061] Сконфигурированные контуры определяют в зависимости от осуществляемых в отношении субъекта экспериментов, и их можно переключать из одной конфигурации в другую в зависимости от изменения переменной или адаптивным образом в зависимости, например, от сознательного или бессознательного ответа субъекта.
[0062] Контуры 140 преобразования, показанные на фигуре 12, используют для стабилизации ответа от ответа активатора в случаях как одноточечного прямого контура для слуховых стимулов, так и распределенного прямого контура для тактильных стимулов. Более подробно, контур 140 преобразователя стабилизирует само воздействие активатора. Он может, например, улучшать его частотный ответ, линеаризовать его фазовый сдвиг для предотвращения гармонических искажений или выравнивать его усиление по спектру, уменьшая уход его параметров при изменении окружающей температуры, и тому подобное. Эти улучшения относятся к сигналу, достигающему соответствующего входного реле (ближайшего устройства 105 управления) в качестве эталона, то есть данный сигнал присутствует на эталонном входе контура преобразования. Если данный сигнал содержит какие-либо искажения, преобразователь воспроизводит данные искажения. Сам преобразователь не вносит значительных дополнительных искажений.
[0063] Контуры 142 канала, показанные на фигуре 13, используют для стабилизации ответов переменных в случае прямых контуров. Добавление контура 142 канала улучшает общую работу канала. При этом, даже сигнал, присутствующий на эталонном входе контура преобразования, упомянутый в настоящем документе выше, демонстрирует дополнительное уменьшение искажений по сравнению с использованием только контура преобразования из-за добавления воздействия отрицательной обратной связи. Контуры 140 преобразования имеют малые времена реакции, тогда как контуры 142 канала обеспечивают более высокий уровень контроля. Более длинные контуры имеют большие времена прохождения.
[0064] Контур 144 интерфейса, показанный на фигуре 14, стабилизирует комбинацию ответов переменных в случае смешанных контуров.
[0065] Адаптивный контур 146, показанный на фигуре 15, имеет параметры, такие как усиление, фазовый сдвиг и тому подобные, которые зависят, по меньшей мере частично, от ответов или реакций субъекта.
[0066] При работе системы 100 оператор активирует главный блок 110 управления, например посредством нажатия кнопки или клавиши, расположенной на интерфейсе 130 оператора. С использованием интерфейса 130 оператора оператор может выбирать желательный тип контура для активации стимуляции субъекта, такой как, например, визуальная стимуляция, акустическая стимуляция, вибрационная стимуляция и тому подобное. Например, слуховой стимул может быть активирован посредством одноточечного прямого контура (как показано на фигуре 3), а тактильный стимул может быть активирован посредством распределенного прямого контура (как показано на фигуре 4). Затем оператор может соединять устройство для стимуляции, соответствующее выбранному типу стимуляции, с главным блоком 110 управления через соответствующие контуры. Пример с фигур 12-15 включает в себя три (3) контура 140 преобразователя, три (3) контура 142 канала и один (1) контур 144 интерфейса, образующие адаптивный контур 146. Главный блок 110 управления автоматически конфигурирует режимы системы, оценивает используемые переменные, вычисляет статистику и устанавливает связи между компонентами системы 100 через конфигурируемый сигнальный путь 115.
[0067] Система 100 с фигуры 2 является очень гибкой в отношении количества стимуляций. Она также проста в работе, и ее легко может транспортировать человек.
[0068] Более конкретно, пример системы 100, как проиллюстрировано на фигуре 11, одновременно создает различные стимуляции. Субъект может носить главный блок 110 управления на поясе, зафиксированном вокруг его талии. Первое устройство для стимуляции в форме устройства 150 акустической стимуляции, сенсорное устройство в форме устройства 152 измерения температуры и второе устройство для стимуляции в форме вибратора 154 соединяют с главным блоком 110 управления посредством конфигурируемого сигнального пути 115.
[0069] Фигуры 12-15 показывают реализацию нескольких контуров для реализации воздействия на субъект двух одновременных сенсорных симуляций с использованием системы 100 с фигуры 2. На фигурах 12-15 субъект испытывает воздействие одновременно двух стимуляций, создаваемых устройством 150 акустической стимуляции, устройством 154 вибрационной стимуляции, а температура определятся термометром 152. Установка в соответствии с фигурами 12-15 была использована в лаборатории для демонстрации того, что тактильная чувствительность субъекта может быть улучшена посредством акустической стимуляции.
[0070] Конечно, следует понимать, что возможны многие другие такие комбинации стимуляций с двумя (2) или даже больше одновременно создаваемыми стимулами.
[0071] Концепция принципа опоры может быть использована для улучшения сенсорных, рефлекторных и/или моторных механизмов субъекта, более конкретно общей чувствительности и постурального баланса субъекта. Настоящее раскрытие показывает улучшение чувствительности сенсорного, рефлекторного и/или моторного механизма субъекта посредством использования сигнала содействия для стимуляции другого отличающегося сенсорного механизма. Для контроля уровня сигнала содействия используют интерфейс контуров стимула.
[0072] Для того, чтобы принцип опоры имел место в нелинейной системе, нелинейной системе требуется три (3) параметра: (i) порог, (ii) облегчающий сигнал, который может быть или определен случайным образом, или быть детерминирован, и (iii) подпороговая информация (то есть возбуждающий сигнал), причем подпороговая информация относится к возбуждающему сигналу, подаваемому на сенсорный механизм и имеющему слишком низкую величину (ниже порога) для того, чтобы предоставлять сенсорному механизму возможность среагировать на этот возбуждающий сигнал. Оптимальная величина добавляемого сигнала содействия может создавать оптимальное усиление обнаружения возбуждающего сигнала. Действительно, когда добавляют слишком малый сигнал содействия, подпороговая информация возбуждающего сигнала остается ниже порога, и ее нельзя обнаруживать. Когда к возбуждающему сигналу добавляют слишком сильный сигнал содействия, сигнал содействия становится слишком сильным по отношению к информационному содержанию возбуждающего сигнала и, поэтому, этот слишком сильный сигнал содействия будет рандомизировать реакции сенсорных, рефлекторных и/или моторных механизмов субъекта в ответ на возбуждающий сигнал.
[0073] Неограничивающий аспект настоящего раскрытия касается стимуляции конкретного типа сенсорного механизма субъекта для улучшения другого типа сенсорного, рефлекторного и/или моторного механизма того же субъекта. Некоторые эксперименты показали, что подача в качестве сигнала содействия слухового шума в ухо (уши) субъекта модулирует тактильное ощущение его/ее указательного пальца, модулирует электромиографическую (EMG) активность его/ее ножных мышц и/или модулирует прочерчиваемую область на стабилограмме во время поддержания положения тела. В других экспериментах сигнал содействия был детерминированным, и гармонический звук в ушах субъекта модулировал тактильное ощущение его/ее икр. В других экспериментах гармонический визуальный сигнал в глазах субъекта модулировал тактильное ощущение его/ее икр. Таким образом, эти эксперименты показывают, что взаимодействия внутри коры головного мозга человека представляют собой взаимодействия на основе принципа опоры, которые формируют мультисенсорную интегрированную систему. Под воздействием сигнала содействия в мультисенсорной интегрированной системе может быть улучшено общее состояние субъекта, включая постуральный баланс.
[0074] Применение принципа опоры, когда субъект испытывает воздействие нескольких стимуляций, содержит использование сигнала содействия для улучшения чувствительности субъекта к возбуждающему сигналу. Возбуждающий сигнал применяют для стимуляции первого сенсорного, рефлекторного и/или моторного механизма субъекта. Сигнал содействия применяют для стимуляции второго сенсорного, рефлекторного и/или моторного механизма субъекта 36. Физиологический ответ субъекта 36 измеряют при первом сенсорном, рефлекторном и/или моторном механизме. Уровень сигнала содействия регулируют на основании измеренного физиологического ответа. Например, для улучшения тактильной чувствительности субъекта к возбуждающему сигналу, как проиллюстрировано на фигуре 11, субъекту подают акустический сигнал, формирующий сигнал содействия. Регулировка акустического сигнала содействия позволяет обнаружить оптимальный уровень улучшения тактильной чувствительности. Процедура, использующая объективные физиологические ответы для обнаружения этого оптимального уровня, описана более подробно в настоящем документе ниже. Опытному читателю, имеющему преимущество настоящего раскрытия, будет ясно, что выражение "оптимальный уровень", как применяется в настоящем документе к улучшению тактильной чувствительности или к регулировке сигнала содействия, предназначено для представления желаемого или удовлетворительного уровня и не предназначено для обозначения абсолютного уровня эффективности.
[0075] Фигура 16 представляет собой схему последовательности операций способа улучшения чувствительности первого сенсорного, рефлекторного и/или моторного механизма субъекта в соответствии с вариантом осуществления. Последовательность 200 может содержать операцию 202 использования источника возбуждающего сигнала для стимуляции первого сенсорного, рефлекторного и/или моторного механизма и операцию 204 регулировки уровня возбуждающего сигнала до порога минимального обнаружения при первом сенсорном, рефлекторном и/или моторном механизме. Затем в операции 206 источник сигнала содействия используют для стимуляции второго сенсорного, рефлекторного и/или моторного механизма субъекта. Операция 208 содержит использование датчика для измерения физиологического ответа первого сенсорного, рефлекторного и/или моторного механизма. Затем в операции 210 уровень сигнала содействия регулируют на основании измеренного физиологического ответа. Применение сигнала содействия и измерение физиологического ответа обеспечивают адаптивный контур, в результате чего регулировка уровня сигнала содействия улучшает чувствительность первого сенсорного, рефлекторного и/или моторного механизма благодаря взаимодействиям на основе принципа опоры. Это представляет собой пример смешанного контура.
[0076] В последовательности 200 сигнал содействия может, например, быть определен случайным образом или представлять собой детерминированные сигналы, и физиологический ответ может, например, содержать температуру, измеренную при первом сенсорном, рефлекторном и/или моторном механизме.
[0077] В варианте последовательности 200 операция 204 регулировки уровня возбуждающего сигнала до подпорогового уровня при первом сенсорном, рефлекторном и/или моторном механизме может содержать снижение уровня возбуждающего сигнала до тех пор, пока он не перестает быть обнаруживаемым для субъекта. При подпороговом уровне машинный интерфейс увеличивает автоматически, или субъект увеличивает вручную сигнал содействия. Когда амплитуда сигнала содействия возрастает, ощущение возбуждающего сигнала возрастает соответствующим образом вплоть до точки, в которой ощущение является максимальным. Данную точку называют точкой максимального ощущения. Если сигнал содействия возрастает еще больше, ощущение возбуждающего сигнала начинает уменьшаться до тех пор, пока оно снова полностью не ослабевает. Данная точка представляет собой пороговый уровень шума, и она будет представлять собой новый эталонный уровень. Сигнал содействия следует подавать по меньшей мере одну минуту до переключения на следующий уровень шума. Точка максимального ощущения будет на пять децибел ниже этой точки. Интерфейс может ослаблять на 5 дБ автоматически посредством включения в себя электронного аттенюатора.
[0078] Стимуляция любого из первого и второго сенсорных, рефлекторных и/или моторных механизмов может быть осуществлена посредством подачи слухового сигнала в по меньшей мере одно ухо субъекта, посредством подачи визуального сигнала в по меньшей мере один глаз субъекта, посредством подачи тактильного сигнала на по меньшей мере одну часть тела субъекта, посредством подачи электромагнитного сигнала на по меньшей мере один участок тела субъекта, посредством подачи теплового сигнала на по меньшей мере один участок тела субъекта, посредством подачи вибрационного сигнала на по меньшей мере один участок тела субъекта, посредством обеспечения восприятия субъектом запаха или посредством обеспечения пробования субъектом вкусового образца.
[0079] Стимуляция любого из первого и второго сенсорных, рефлекторных и/или моторных механизмов может быть осуществлена посредством непосредственной подачи возбуждающего сигнала или сигнала содействия на определенный участок тела субъекта.
[0080] Стимуляция первого сенсорного, рефлекторного и/или моторного механизма может также быть осуществлена посредством дифференциальной подачи возбуждающего сигнала с помощью стимуляции двух различных участков тела субъекта, для того чтобы стимулировать область тела субъекта между двумя различными участками. Стимуляция первого сенсорного, рефлекторного и/или моторного механизма может также быть осуществлена посредством распределения возбуждающего сигнала с помощью стимуляции нескольких участков тела субъекта, для того чтобы стимулировать область тела субъекта, занимаемую данными несколькими участками. Стимуляция первого сенсорного, рефлекторного и/или моторного механизма может в качестве альтернативы быть осуществлена посредством распределения множества различных возбуждающих сигналов по телу субъекта.
[0081] Стимуляция второго сенсорного, рефлекторного и/или моторного механизма может также быть осуществлена посредством дифференциальной подачи сигнала содействия с помощью стимуляции двух различных участков тела субъекта, для того чтобы стимулировать область тела субъекта между двумя различными участками. Стимуляция второго сенсорного, рефлекторного и/или моторного механизма может также быть осуществлена посредством распределения сигнала содействия с помощью стимуляции нескольких участков тела субъекта, для того чтобы стимулировать область тела субъекта, занимаемую данными несколькими участками. Стимуляция второго сенсорного, рефлекторного и/или моторного механизма может в качестве альтернативы быть осуществлена посредством распределения множества различных сигналов содействия по телу субъекта.
[0082] Фигура 17 представляет собой схему последовательности операций подробной последовательности для регулировки уровня сигнала содействия на основании измеренного физиологического ответа в соответствии с другим вариантом осуществления. В варианте осуществления операция 210 фигуры 16 может содержать операции 211-17. Операция 211 содержит вначале отсутствие подачи сигнала содействия. Операция 212 содержит получение первого измерения физиологического ответа при отсутствии сигнала содействия. Затем операция 213 включает в себя повышение уровня сигнала содействия, после которого операция 214 содержит получение следующего измерения физиологического ответа. Точку перегиба следующего измерения физиологического ответа обнаруживают в операции 215. После обнаружения точки перегиба для имеющегося уровня сигнала содействия, если предварительно определенный максимальный уровень сигнала содействия не достигнут в операции 216, операции 213, 214 и 215 повторяют. После достижения предварительно определенного максимального уровня сигнала содействия в операции 216 операция 217 содержит выбор уровня сигнала содействия, обеспечивающего максимальный физиологический ответ, который возрастает в течение времени его получения, для завершения регулировки уровня сигнала содействия на основании измеренного физиологического ответа.
[0083] В варианте операция 214 получения каждого физиологического измерения может быть выполнена в реальном времени. Опытный читатель, имеющий преимущество настоящего раскрытия, будет способен регулировать время получения в пределах данного диапазона или более широкого диапазона в соответствии с конкретными условиями реализации способа. В тех же или других вариантах выбор в операции 217 уровня сигнала содействия, обеспечивающего максимальный физиологический ответ, который возрастает в течение времени его получения, может содержать вычисление интеграла каждого измерения физиологического ответа в течение времени его получения, вычисление градиента каждого физиологического ответа, причем данный градиент нормализуют по его собственной величине, вычисление для каждого физиологического ответа произведения интеграла на его градиент и затем выбор наивысшего положительного произведения.
[0084] Конечно, система 100 и ее компоненты, описанные в предшествующем описании фигур 2-4, 6-15, и варианты такой системы 100 и компонентов, могут быть использованы для применения способа и повышения чувствительности первого сенсорного, рефлекторного и/или моторного механизма субъекта. Система 100 может, таким образом, содержать источник и тому подобное сигнала содействия для стимуляции второго сенсорного, рефлекторного и/или моторного механизма субъекта, датчик для измерения физиологического ответа первого сенсорного, рефлекторного и/или моторного механизма и контроллер, например главный блок 110 управления или контроллер, встроенный в главный блок 110 управления, для регулировки уровня сигнала содействия на основании измеренного физиологического ответа. Например, датчик может быть выполнен с возможностью измерения температуры при первом сенсорном, рефлекторном и/или моторном механизме.
[0085] Система 100 может регулировать уровень сигнала содействия, который улучшает чувствительность первого сенсорного, рефлекторного и/или моторного механизма субъекта благодаря взаимодействиям на основе принципа опоры. В этой системе 100 источник сигнала содействия может содержать устройство для визуальной стимуляции, устройство для вибрационной стимуляции, устройство для электромагнитной стимуляции, устройство для тепловой стимуляции, устройство для тактильной стимуляции, устройство для акустической стимуляции, запах (например, душистое вещество), помещенный на небольшом расстоянии от субъекта, или вкусовой образец, который субъект может пробовать. Источник сигнала содействия может быть выполнен с возможностью непосредственной стимуляции определенного участка тела субъекта. В качестве альтернативы, система 100 может содержать два источника для подачи дифференциального сигнала содействия посредством стимуляции двух различных участков тела субъекта, для того чтобы стимулировать область тела субъекта между двумя различными участками. В другой альтернативном варианте система 100 может содержать множество источников для подачи распределенного сигнала содействия посредством стимуляции нескольких участков тела субъекта, для того чтобы стимулировать область тела субъекта, занимаемую данными несколькими участками, или множество источников различных типов для подачи множества различных сигналов содействия на тело пациента.
[0086] Контроллер системы 100 может быть способен выполнять или контролировать выполнение всех операций последовательности с фигуры 16 и 17, включая, без ограничения, осуществление каждого получения физиологического измерения в течение времени в диапазоне между одной (1) и двумя (2) минутами, а также включая, без ограничения, выбор уровня сигнала содействия, обеспечивающего максимальный физиологический ответ, который возрастает в течение времени его получения, посредством вычисления интеграла каждого измерения физиологического ответа в течение времени его получения, вычисления градиента каждого физиологического ответа, причем данный градиент нормализуют по его собственной величине, вычисления для каждого физиологического ответа произведения интеграла на его градиент и выбора наивысшего положительного произведения.
[0087] Система 100 может содержать источник и тому подобное возбуждающего сигнала для стимуляции первого сенсорного, рефлекторного и/или моторного механизма, в случае чего контроллер выполнен с возможностью регулировки, перед регулировкой уровня сигнала содействия, уровня возбуждающего сигнала до подпорогового уровня при первом сенсорном, рефлекторном и/или моторном механизме. Контроллер может также быть выполнен с возможностью регулировки уровня возбуждающего сигнала до подпорогового при первом сенсорном, рефлекторном и/или моторном механизме посредством снижения уровня возбуждающего сигнала до тех пор, пока он не перестает быть обнаруживаемым для субъекта. При подпороговом уровне машинный интерфейс увеличивает автоматически, или субъект увеличивает вручную сигнал содействия. Когда амплитуда сигнала содействия возрастает, ощущение возбуждающего сигнала возрастает соответствующим образом вплоть до точки, в которой ощущение является максимальным, это точка максимального ощущения. Если сигнал содействия возрастает еще больше, ощущение возбуждающего сигнала начинает уменьшаться до тех пор, пока ощущение возбуждающего сигнала снова полностью не ослабевает. Данная точка представляет собой пороговый уровень шума, и она будет представлять собой новый эталонный уровень. Сигнал содействия следует подавать по меньшей мере одну минуту до переключения на следующий уровень шума. Точка максимального ощущения будет на пять децибел ниже этой точки. Интерфейс может ослаблять на 5 дБ автоматически посредством включения в себя электронного аттенюатора. Источник возбуждающего сигнала может содержать устройство для визуальной стимуляции, устройство для вибрационной стимуляции, устройство для электромагнитной стимуляции, устройство для тепловой стимуляции, устройство для тактильной стимуляции, устройство для акустической стимуляции, источник запаха (например, душистое вещество), помещенный на небольшом расстоянии от субъекта, или устройство, предоставляющее вкусовой образец, который субъект может пробовать. Стимулятор, соединенный с источником возбуждающего сигнала, может подавать возбуждающий сигнал на первый сенсорный, рефлекторный и/или моторный механизм, тогда как другой стимулятор, соединенный с источником сигнала содействия, может подавать сигнал содействия на второй сенсорный, рефлекторный и/или моторный механизм.
[0088] Система 100 может также содержать интерфейс для соединения системы 100 с компьютером для передачи на него информации о процессе стимуляции.
[0089] Практическая реализация описанных выше системы 100 и способа была осуществлена и описана в настоящем документе ниже. Фигура 18 представляет собой вид в перспективе реализации нейротюнера в соответствии с вариантом осуществления. Система 200 содержит главный блок управления 210, который обычно включает в себя большинство элементов системы 100 с фигуры 2. Главный блок управления 210 содержит источник сигнала содействия и источник возбуждающего сигнала с отдельными элементами 212 и 214 управления сигналом. Система 200 также содержит интерфейс 216 сигнала содействия, соединенный с аудиогарнитурой 218, и интерфейс 220 возбуждающего сигнала, соединенный с активатором 222 тактильного сигнала. Активатор 222 тактильного сигнала может также функционировать в качестве датчика температуры, или температуру можно измерять независимо с помощью датчика 224 температуры, соединенного с главным блоком управления 210 через интерфейс 226 физиологического ответа. Наконец, система 200 содержит интерфейс 228 оператора для автоматического управления главным блоком управления 210.
[0090] Система 200 использует компьютерный интерфейс, содержащий контур 140 преобразователя и контур 142 канала, которые измеряют изменение периферической температуры субъекта, которая, в данном конкретном примере, представляет возбуждающий сигнал. Данный компьютерный интерфейс основан на том факте, что периферическая температура тела субъекта, измеренная на его конечностях, изменяется в соответствии с количеством крови, протекающим через кожу. Оно, в свою очередь, зависит от состояния симпатического возбуждения клиента. Когда человек испытывает стресс, его пальцы имеют тенденцию становиться холоднее. Это явление хорошо известно в области обучения релаксации, когда субъекты учатся сознательно повышать температуру пальцев. В настоящем документе подпороговый уровень представляет состояние стресса.
[0091] Аналогичное упражнение было выполнено с участием шести (6) субъектов. Субъектов не просили учиться сознательно повышать температуру их пальцев. Вместо этого повышение температуры пальцев облегчали посредством использования эффективного случайным образом определенного слухового сигнала. Субъекты начинали эксперименты в условиях отсутствия сигнала содействия в течение двух (2) минут, и затем три случайным образом определенных уровня сигнала в диапазоне от низкой, средней и высокой амплитуды подавали на аудиогарнитуры 218 в течение периодов по две (2) минуты каждый. Наконец, снова использовали состояние отсутствия содействия в течение другого периода, составляющего две (2) минуты. Активатор 222 тактильного сигнала был прикреплен к ладонной стороне указательного пальца с помощью короткой полоски текстильной застежки, для того чтобы получать значения температуры их пальцев. Фигуры 19-24 предоставляют экспериментальные результаты, полученные с использованием нейротюнера в соответствии с фигурой 18. Эти фигуры были получены от шести (6) субъектов, обозначенных как S1-S6. На каждой из фигур 19-24 верхняя часть показывает график температуры ладонной стороны указательного пальца в зависимости от времени, причем графики разделены на следующие пять (5) последовательных состояний: (a) сигнал содействия отсутствует, (b) низкий случайным образом определенный уровень, (c) средний случайным образом определенный уровень, (d) высокий случайным образом определенный уровень и (e) сигнал содействия отсутствует. Нижняя часть фигур показывает гистограммы оптимального индекса - описан в настоящем документе ниже - в зависимости от слуховых состояний (a-e) случайным образом определенного сигнала содействия.
[0092] Из результатов эксперимента могут быть сделаны следующие наблюдения:
[0093] 1) У субъектов S1, S2, S3, S4, S5 температура в среднем снижалась в течение первого состояния отсутствия сигнала содействия.
[0094] 2) В целом, один из случайным образом определенных уровней был более эффективен в повышении температуры у всех участников.
[0095] 3) У субъектов S1, S3, S4, S6 температура в среднем снижалась в течение последнего состояния отсутствия сигнала содействия.
[0096] 4) Только у субъектов S2 и S5 температура в среднем повышалась в течение состояния отсутствия сигнала содействия,
[0097] 5) В целом, случайным образом определенный слуховой сигнал оказался эффективен для повышения температуры.
[0098] Точку максимального ощущения измеряли следующим образом: Эксперименты начинали с состояния отсутствия содействия в течение двух (2) минут. Интерфейс делал измерения изменений температуры. Подачу слухового случайным образом определенного сигнала начинали вручную с низкого уровня амплитуды. Производили наблюдения, повышалась ли температура, в случае чего этот уровень сохраняли до тех пор, пока температура не начинала снижаться. Уровень сигнала содействия снова поднимали, до среднего уровня амплитуды. Данный процесс повторяли, когда уровень амплитуды случайным образом определенного сигнала был высоким, что было предварительно определенным максимумом для эксперимента. У большинства субъектов температура снижалась, пока присутствовал этот случайным образом определенный сигнал с высокой амплитудой. Интерфейс 228 оператора затем вычислял интеграл, что давало площадь под кривыми в верхней части фигур 19-24. Интерфейс 228 оператора также вычислял средний градиент, нормализованный по его собственной величине. Конечно, это каждый раз давало единичное значение, или положительное, или отрицательное, в зависимости от положительного или отрицательного наклона кривых. Произведение площади под кривой и положительной или отрицательной единицы обозначало оптимальный уровень сигнала содействия, также называемый в настоящем документе оптимальным индексом. Оптимальный уровень содействия представлял собой, таким образом, уровень с наивысшим положительным оптимальным индексом. Интерфейс 228 оператора может автоматически определять, какой уровень содействия обеспечивает оптимальный индекс, но это определение может, конечно, быть выполнено вручную на основании экспериментальных результатов.
[0099] В варианте может быть реализован адаптивный контур; интерфейс 228 оператора может также автоматически подавать требуемый слуховой сигнал содействия для поиска оптимального индекса. Интерфейс 228 оператора может вычислять градиент температуры в реальном времени. Если градиент является положительным или нулевым, амплитуду слухового содействия не меняют. В ином случае слуховой сигнал содействия увеличивают до тех пор, пока градиент не станет снова нулевым или положительным. Было замечено, что время ожидания до того, как интерфейс 228 оператора повышал уровень слухового содействия, составляющее две (2) минуты, является удовлетворительным. Если градиент остается отрицательным после двух повышений уровня шума, интерфейс 228 оператора может быть выполнен с возможностью остановки данного процесса и автоматического определения оптимального индекса, как в абзаце выше.
[00100] Настоящее раскрытие было описано в предшествующем описании изобретения с помощью не ограничивающих иллюстративных вариантов осуществления, приведенных в качестве примеров. Эти иллюстративные варианты осуществления могут быть изменены по желанию. Объем формулы изобретения не следует ограничивать вариантами осуществления, изложенными в примерах, но следует давать ему наиболее широкую интерпретацию, соответствующую описанию в целом.
Реферат
Изобретение относится к медицине, а именно к системе и способу оценки чувствительности субъекта к стимулу, а также к системе для улучшения чувствительности первого сенсорного, рефлекторного и моторного механизма субъекта. Система для оценки чувствительности субъекта к стимулу содержит первый канал действия, канал реакции, сигнальный путь, контроллер. Первый канал действия выполнен с возможностью создания стимула первого типа для субъекта. Канал реакции выполнен с возможностью приема ответа от субъекта. Каналы действия и реакции реализованы посредством приводов и датчиков. Сигнальный путь соединен с первым каналом действия и с каналом реакции. Контроллер выполнен с возможностью установления первого контура преобразования, первого контура канала, контура интерфейса, адаптивного контура. Первый контур преобразования включает в себя первый канал действия и образует путь, оканчивающийся в сигнальном пути. Первый контур канала включает в себя первый канал действия, образует путь через сигнальный путь и оканчивается в первом блоке эталона. Контур интерфейса включает в себя первый канал действия, канал реакции и первый блок эталона, причем первый блок эталона имеет первое исходное значение параметра. Адаптивный контур включает в себя первый канал действия, канал реакции и первый блок эталона, причем первый блок эталона регулируют от первого исходного значения параметра к первому адаптированному значению параметра на основании ответа от субъекта. Сигнальный путь представляет собой автоматически конфигурируемый сигнальный путь, образованный переключателями, которые размыкаются и замыкаются по командам от контроллера, позволяя динамически переконфигурировать систему так, что канал действия может стать каналом реакции в соответствии с предварительно установленной программой или в соответствии с ответами субъекта в реальном времени или с задержкой. При реализации способа используют первый канал действия в качестве источника возбуждающего сигнала для стимуляции первого сенсорного, рефлекторного и моторного механизма субъекта. Используют второй канал действия в качестве источника сигнала содействия для стимуляции второго сенсорного, рефлекторного и моторного механизма субъекта. Измеряют с помощью канала реакции физиологический ответ первого сенсорного, рефлекторного и моторного механизма. Система для улучшения чувствительности первого сенсорного, рефлекторного и моторного механизма субъекта содержит источник сигнала содействия для стимуляции механизмов субъекта, датчик для измерения физиологического ответа механизмов субъекта, контроллер. При этом контроллер обеспечен для автоматического выбора источника сигнала содействия и автоматической регулировки уровня сигнала содействия на основании измеренного физиологического ответа и оценки измеренного физиологического ответа по измерениям. Регулировка уровня сигнала содействия улучшает чувствительность механизмов субъекта благодаря взаимодействиям на основе принципа опоры. Достигается усиление восприятия реальности и улучшение восприятия, обеспечивается конфигурируемая система для оценки чувствительности субъекта к стимулу. 3 н. и 21 з.п. ф-лы, 24 ил.
Комментарии