Режектор пассивных помех - RU172404U1
Код документа: RU172404U1
Чертежи


Описание
Устройство относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех при групповой перестройке несущей частоты зондирующих импульсов.
Известно радиолокационное устройство для обнаружения движущейся цели [1], содержащее последовательно включенные блоки задержки, умножитель комплексных чисел и вычитатель. Однако это устройство обладает низкой эффективностью выделения сигнала движущейся цели.
Другим известным устройством является корреляционный автокомпенсатор [2], который содержит ряд блоков задержки, два перемножителя, сумматор и блок оценки параметров коррелированной помехи. Недостатком этого устройства является плохое подавление кромок протяженной помехи из-за большой постоянной времени цепи адаптивной обратной связи.
Наиболее близким к заявляемому устройству является цифровое устройство для подавления пассивных помех [3], выбранное в качестве прототипа, содержащее два блока задержки, блок весовых коэффициентов, комплексные перемножители, весовой блок и комплексный сумматор. Однако данное устройство из-за переходного процесса при поступлении кромки пассивной помехи имеет низкую эффективность выделения сигналов движущихся целей.
Задачей, решаемой в заявляемом устройстве, является повышение эффективности режектирования пассивной помехи и выделения сигналов движущихся целей при обработке группы импульсов на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Для решения поставленной задачи в режектор пассивных помех, содержащий первый и второй блоки задержки, блок весовых коэффициентов, первый и второй комплексные перемножители, весовой блок и комплексный сумматор, введены блок комплексного сопряжения, блок переключения, блок точности, блок коммутации, двухканальный коммутатор и синхрогенератор.
Дополнительные блоки, введенные в предлагаемое устройство, являются известными. Так, соединенные вместе первый блок задержки, первый комплексный перемножитель, весовой блок и комплексный сумматор применяются для режектирования пассивных помех, однако неизвестно их применение совместно с блоком коммутации и двухканальным коммутатором для более точной компенсации помехи. Новыми являются связи между блоком весовых коэффициентов и блоком переключения и весовым блоком, блоком точности и вторым комплексным перемножителем, вторым блоком задержки, двухканальным коммутатором, вторым комплексным перемножителем и блоком коммутации, а также связи между синхрогенератором и остальными блоками режектора пассивных помех, обеспечивающими, соответственно, оптимальную и согласованную обработку группы импульсов, что приводит в сочетании с более точной компенсацией помехи к повышению эффективности выделения сигналов движущихся целей при перестройке несущей частоты на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение эффективности режектирования пассивной помехи и выделения сигналов движущихся целей.
Заявляемое решение носит технический характер, осуществимо, воспроизводимо и, следовательно, является промышленно применимым.
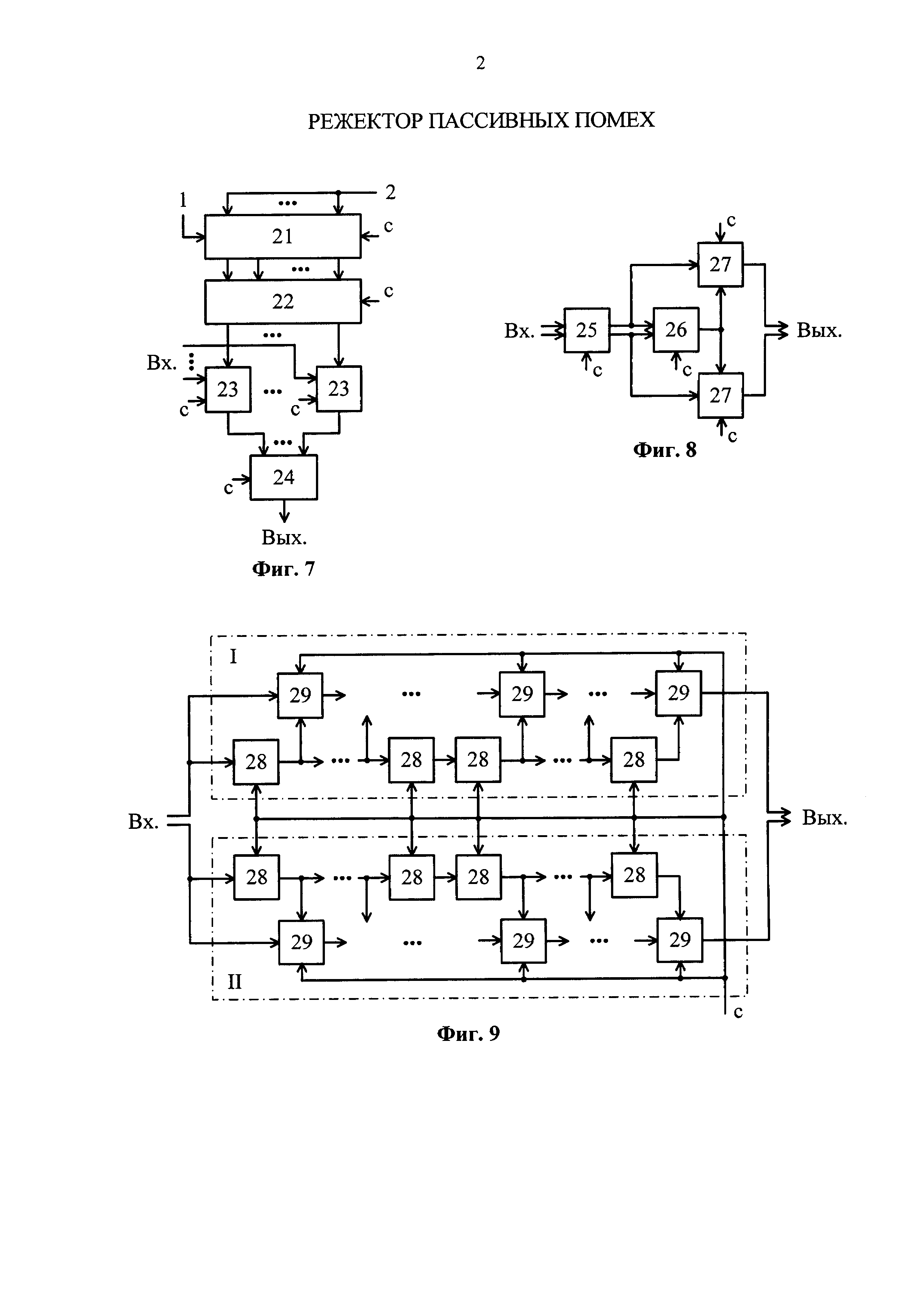
На фиг. 1 представлена структурная электрическая схема режектора пассивных помех; на фиг. 2 - блока задержки; на фиг. З - блока комплексного сопряжения; на фиг. 4 - комплексного перемножителя; на фиг. 5 - весового блока; на фиг. 6 - комплексного сумматора; на фиг. 7 - блока переключения; на фиг. 8 - блока точности; на фиг. 9 - накопителя; на фиг. 10 - блока вычисления модуля; на фиг. 11 - двухканального коммутатора.
Режектор пассивных помех (фиг. 1) содержит первый блок 1 задержки, блок 2 весовых коэффициентов, первый комплексный перемножитель 3, весовой блок 4, комплексный сумматор 5, второй комплексный перемножитель 6, блок 7 коммутации, второй блок 8 задержки, блок 9 комплексного сопряжения, блок 10 переключения, блок 11 точности, двухканальный коммутатор 12 и синхрогенератор 13.
Блоки 1, 8 задержки (фиг. 2) содержат два оперативных запоминающих устройства 14; блок 9 комплексного сопряжения (фиг. 3) содержит инвертор 15; комплексный перемножитель 3, 6 (фиг. 4) содержит два канала (I, II), каждый из которых содержит перемножители 16, 17 и сумматор 18; весовой блок 4 (фиг. 5) содержит два перемножителя 19; комплексный сумматор 5 (фиг. 6) содержит два сумматора 20; блок 10 переключения (фиг. 7) содержит счетчик 21, дешифратор 22, блоки 23 совпадений и сумматор 24; блок 11 точности (фиг. 8) содержит накопитель 25, блок 26 вычисления модуля и два делителя 27; накопитель 25 (фиг. 9) содержит два канала (I, II), состоящих из n элементов 28 задержки на интервал tд и n сумматоров 29; блок 26 вычисления модуля (фиг. 10) содержит два перемножителя 30, сумматор 31 и блок 32 извлечения квадратного корня; двухканальный коммутатор 12 (фиг. 11) содержит два коммутатора 33.
Режектор пассивных помех работает следующим образом.
Группа когерентных радиоимпульсов, первоначально излученных с одинаковой несущей частотой и состоящих из сигнала от движущейся цели и пассивной помехи, значительно превышающей сигнал, поступает на вход радиоприемного устройства, в котором усиливается, в квадратурных фазовых детекторах переносится на видеочастоту, а затем подвергается аналого-цифровому преобразованию (соответствующие блоки на фиг. 1 не показаны).
Цифровые коды (хkl, ykl) обеих квадратурных проекций, следующие через период повторения Т, в каждом элементе разрешения по дальности (кольце дальности) каждого периода повторения образуют комплексные числа
Ukl=хkl+iykl=|Ukl|ехр(ikϕl),
где k - номер текущего периода, l - номер текущего кольца дальности, ϕl - доплеровский сдвиг фазы за период повторения (обычно помехи, ввиду ее значительного превышения над сигналом), равный

Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на входы первого блока 1 задержки (фиг. 2) и на соединенные с ними входы весового блока 4 (фиг. 5). Каждый из блоков 1, 8 задержки (фиг. 2) состоит из параллельно включенных оперативных запоминающих устройств (ОЗУ) 14, служащих для хранения отсчетов с колец дальности в течение одного периода Т.
В блоке 9 комплексного сопряжения с помощью инвертора 15 (фиг. 3) происходит инвертирование знака мнимых проекций задержанных отсчетов. В комплексном перемножителе 3 происходит перемножение соответствующих комплексных чисел, реализуемое путем операций с проекциями этих чисел в соответствии с фиг. 4. Образованные величины

поступают в блок 11 точности (фиг. 8), в котором накопитель 25 (фиг. 9) осуществляет с помощью элементов 28 задержки и сумматоров 29 скользящее вдоль дальности в каждом периоде повторения суммирование произведений


где

В блоке 26 вычисления модуля (фиг. 10) определяются величины |Yk|, а затем на выходах делителей 27 (фиг. 8) - величины

В весовом блоке 4 (фиг. 5) происходит взвешивание поступающих отсчетов весовыми коэффициентами gk, которые хранятся в блоке 2 весовых коэффициентов. Число весовых коэффициентов gk определяется реализуемым порядком режектора пассивных помех m, связанным с числом импульсов в группе, равным m+1. В частности, при m=1 весовые коэффициенты g0=-g1=1; при m=2-g0=g2=1, g1=-2; при m=3-g0=-g3=1, g2=-g3=-3. Весовые коэффициенты переключаются в каждом периоде повторения блоком 10 переключения (фиг. 7), который обеспечивает обработку группы импульсов (отсчетов) с одинаковой исходной несущей частотой.
Импульс от синхронизатора радиолокатора (на фиг. 1 не показан), соответствующий излучению зондирующего импульса в каждом периоде, поступает на первый управляющий вход (1) режектора (фиг. 1), являющийся первым управляющим входом (1) блока 10 переключения, а затем на счетный вход счетчика 21 (фиг. 7). Показания счетчика, соответствующие номеру импульса в группе, в дешифраторе 22 преобразуются в единичный сигнал на соответствующем номеру импульса выходе дешифратора 22. Этот сигнал открывает подключенный к нему каскад совпадений 23, через который проходит соответствующий весовой коэффициент, поступающий через сумматор 24 на выход блока 10 переключения. Таким образом, каждому периоду и, следовательно, каждому импульсу в группе соответствует свой весовой коэффициент.
Взвешенные в весовом блоке 4 отсчеты суммируются в комплексном сумматоре 5 с задержанными во втором блоке 8 задержки на период повторения T, прошедшими через двухканальный коммутатор 12 и умноженными во втором комплексном перемножителе 6 на величину


Двумерный поворот задержанных отсчетов на угол

После завершения обработки данных m+1 периодов и очередной перестройки несущей частоты на вторые управляющие входы (2) устройства (фиг. 1) и блока 10 переключения (фиг. 7) и управляющий вход блока 7 коммутации поступает импульс, который обнуляет счетчик 21, а в блоке 7 коммутации переключает релаксационный генератор (мультивибратор). По команде блока 7 коммутации двухканальный коммутатор 12 переключает второй блок 8 задержки к выходу режектора пассивных помех, и в течение периода повторения Т происходит считывание результатов режектирования V. На вход режектора пассивных помех поступают и начинают обрабатываться данные первого периода следующей группы.
Синхронизация режектора пассивных помех осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов от синхрогенератора 13 (фиг. 1), управляемого совместно с блоком 10 переключения импульсами (1) синхронизатора радиолокатора (на фиг. 1 не показан), следующими с интервалом Т. Период повторения синхронизирующих импульсов равен интервалу временной дискретизации tд, выбираемому из условия требуемой разрешающей способности по дальности.
Достигаемый технический результат состоит в следующем. На выход устройства не поступают нескомпенсированные остатки помехи в переходном режиме, традиционно маскирующие сигнал от цели. В предлагаемом устройстве на выход поступают только скомпенсированные остатки помехи в установившемся режиме, что исключает эффект «кромки» помехи и повышает эффективность выделения сигналов движущихся целей.
Таким образом, режектор пассивных помех повышает эффективность компенсации пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Библиография
1. Патент №63-49193 (Япония), МПК G01S 13/52. Радиолокационное устройство для обнаружения движущейся цели / К.К. Тосиба. Опубл. 03.10.1988. - Изобретения стран мира. - 1989. - Выпуск 109. - №15. - С. 52.
2. Радиоэлектронные системы: основы построения и теория. Справочник / Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И. Леховицкий [и др.]; под ред Я.Д. Ширмана. - 2-е изд., перераб. и доп. - М.: Радиотехника, 2007; с. 439, рис. 25.22.
3. А.с. 743208 СССР, МПК G01S 7/36. Цифровое устройство для подавления пассивных помех / Д.И. Попов. - №2540079/09; заявл. 03.11.1977; опубл. 25.06.1980, Бюл. №23. - 4 с.
Реферат
Полезная относится к радиолокационной технике и предназначена для выделения сигналов движущихся целей на фоне пассивных помех при групповой перестройке несущей частоты зондирующих импульсов. Достигаемый технический результат - повышение эффективности выделения сигналов движущихся целей. Указанный результат достигается тем, что режектор пассивных помех содержит первый и второй блоки задержки, блок весовых коэффициентов, первый и второй комплексные перемножители, весовой блок, комплексный сумматор, блок комплексного сопряжения, блок переключения, блок точности, блок коммутации, двухканальный коммутатор и синхрогенератор, определенным образом соединенные между собой и осуществляющие когерентную обработку исходных отсчетов. 11 ил.
Комментарии