Устройство для имитации ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией - RU2625567C1
Код документа: RU2625567C1
Чертежи
Описание
Изобретение относится к радиолокации, а именно к устройствам, предназначенным для имитации частотно-временной структуры радиолокационного сигнала, отраженного от подстилающей поверхности, от одной или нескольких целей, находящихся на фиксированном направлении, и может быть использовано, например, для имитации ложных целей, в том числе расположенных ближе носителя, для имитации боевой работы радиолокационной системы (РЛС), а также для имитации эхо-сигналов радиовысотомеров (РВ) - измерителей высоты полета, работающих с сигналами с линейной частотной модуляцией (ЛЧМ).
В зависимости от типа сигнала и способов сканирования РЛС оптимальными будут различные методы и алгоритмы формирования имитирующего сигнала. Для РЛС импульсного излучения форма зондирующего сигнала, как правило, постоянна и точно известна, поэтому отраженный сигнал может быть заранее подготовлен в сигнальной памяти с учетом параметров моделирования и выдан на вход РЛС по сигналу пикового детектора обнаруживающего начало зондирующего импульса. В современных РЛС для повышения помехоустойчивости, а также для получения дополнительной информации о целях, могут использовать частотную модуляцию с переменными параметрами. Поэтому расчет отраженного сигнала и последующее его воспроизведение необходимо выполнять в реальном масштабе времени на основе принимаемой реализации сигнала, сохраняя возможность последующей когерентной обработки в РЛС.
Аналогично, в большинстве РВ с ЛЧМ в настоящее время реализуется следящий прием отраженного сигнала со стабилизацией дальномерной частоты за счет изменения параметров модуляции. При этом длительность периода и крутизна перестройки частоты зондирующего сигнала зависят от текущей высоты полета, значений скорости и угловых эволюций летательного аппарата (ЛА), типа облучаемой поверхности, рельефа и др. Кроме того, каждый образец РЛС и РВ может иметь отклонения, обусловленные неточностью настройки и нестабильностью параметров радиоэлементов. Этот факт исключает возможность предварительного расчета отраженного сигнала даже в случае детерминированной траектории движения и имитируемого рельефа подстилающей поверхности.
Поэтому для качественной имитации частотно-временной структуры отраженного радиолокационного сигнала применяются методы формирования отраженного сигнала как суммы сигналов, отраженных различными достаточно малыми по сравнению с облучаемой площадью участками поверхности или эквивалентными блестящими точками.
Известно устройство для имитации радиолокационных портретов реальных целей [1, стр. 134-135, рис. 5.2], в котором зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель, устройство грубой задержки, устройство точной задержки, набор модуляторов и сумматор на выход имитатора. Устройство грубой задержки осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Линия задержки с отводами обеспечивает имитацию блестящих точек цели. Амплитудные и фазовые модуляции выполняются с помощью эталонных сигналов, соответствующих характеристикам целей. С выхода модулятора сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор и далее в передающую антенну.
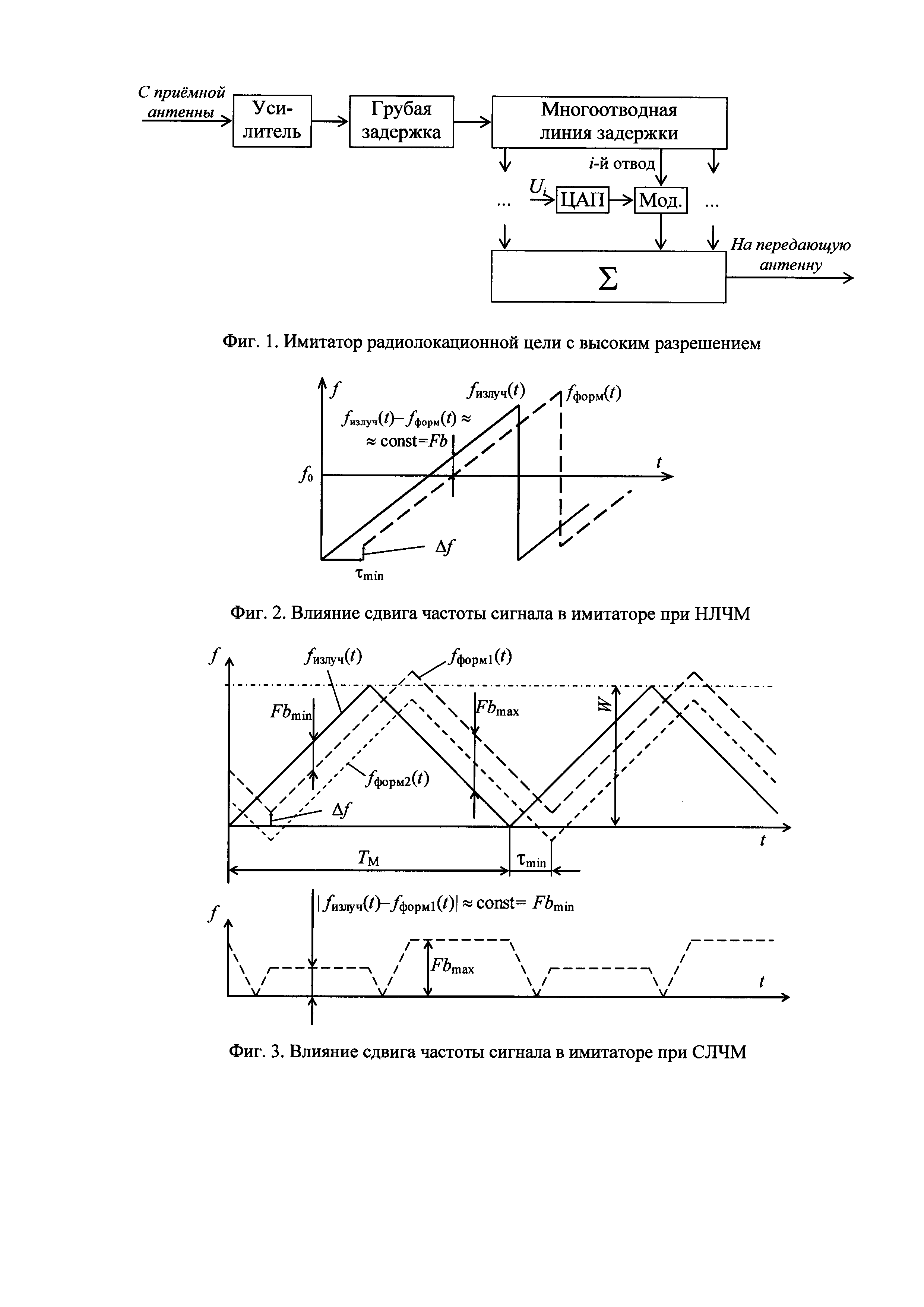
Описанное устройство имитатора по структуре и принципу функционирования соответствует системе увеличения радиочастотного отклика [2], устройству генератора электромагнитной цели [3], методу обмана сонара или радиолокатора и ложной цели, применяющей этот метод [4], методу электронного увеличения радиолокационных целей (техники) [5, 6]. Типовое для данной задачи устройство для имитации радиолокационных целей с высоким разрешением [6] приведено на фиг. 1.
При практическом применении описанных методов и устройств имитации радиолокационных портретов при переменных параметрах модуляции возникает проблема имитации целей с дальностью меньше дальности носителя, защищаемого от работающей РЛС. Аналогичные сложности возникают при использовании имитаторов сигнала для исследования характеристик радиовысотомеров при полунатурном моделировании работы в лабораторных условиях: невозможно обеспечить имитацию сигнала с задержкой менее длительности прохождения сигнала в трактах обработки и формирования имитирующего сигнала.
На сегодняшний день даже в лучших известных схемах цифровой сигнальной памяти минимальная задержка составляет 40 нс, что соответствует дальности 6 м. С учетом использования в реальных имитаторах усилителей, фильтров, аттенюаторов, соединительных кабелей, соответствующая минимальная имитируемая дальность (от момента начала входного сигнала) составляет 10-20 м и более, что ограничивает как возможности скрытия истинного положения носителя, защищаемого от РЛС высокого разрешения, так и возможность имитации малых высот при проверке радиовысотомеров.
Известно, что и доплеровский сдвиг и временная задержка отраженного ЛЧМ сигнала при несимметричной модуляции могут имитироваться соответствующим смещением его несущей частоты [10, 11]. Поэтому для снижения минимальной имитируемой высоты и компенсации собственной задержки в любой аппаратной реализации возможно использование определенного сдвига частоты: например, РВ с несимметричной ЛЧМ (НЛЧМ) будет регистрировать эквивалентную малую высоту, если при формировании сигнала выполнить дополнительный частотный сдвиг Δƒ в сторону «сближающую» на измерительном участке графики ƒизлуч(t) и ƒформ(t) - см. фиг. 2. Частота преобразованного в ЛЧМ РВ сигнала - так называемого сигнала биений на выходе смесителя, является разностью частот двух сигналов: излучаемого и отраженного:

где ƒизлуч(t) - зависимость частоты от времени в излучаемом РВ сигнале;
ƒформ(t) - зависимость частоты от времени в отраженном одиночной точечной целью сигнале или в соответствующем сигнале, формируемом имитатором;
Fb - значение частоты сигнала биений в основной части измерительного участка (исключая участки скачкообразного изменения параметров модуляции ƒизлуч(t), ƒформ(t).
Видно (см. фиг. 2), что положительный сдвиг частоты Δƒ для сигнала, задержанного на некоторую минимальную задержку τmin, приведет к уменьшению значения средней частоты биений Fb и соответственно к уменьшению измеряемой высоты.
Первый недостаток этого способа - зависимость требуемого знака сдвига частоты Δƒ от направления (знака) скорости линейного изменения частоты НЛЧМ радиолокатора.
Второй недостаток - при симметричной ЛЧМ (СЛЧМ). Только положительный сдвиг частоты для сигнала ƒформ1(t) (задержан на τmin и смещен вверх на Δƒ относительно ƒизлуч(t)) в основных частях - полупериодах измерительного участка (исключая зоны обращения) сформирует два значения частоты биений: значение Fbmin в одном полупериоде и значение Fbmax во втором полупериоде - см. ƒформ1(t) на фиг. 3. Если бы вычислитель такого радиолокатора работал по переднему фронту спектра, то задача уменьшения измеряемой дальности была бы решена. Но на примере типового СЛЧМ РВ, если в РВ используется оценка дальности по частоте биений соответствующей центу тяжести спектра усредненного на всем периоде модуляции, то такое раздвоение основной гармоники спектра не повлияет на измеряемое значение высоты в РВ. Простая замена «+Δƒ» на «-Δƒ» приведет лишь к смене очередности полупериодов с Fbmin и Fbmax - см. ƒформ2(t) на фиг. 3.
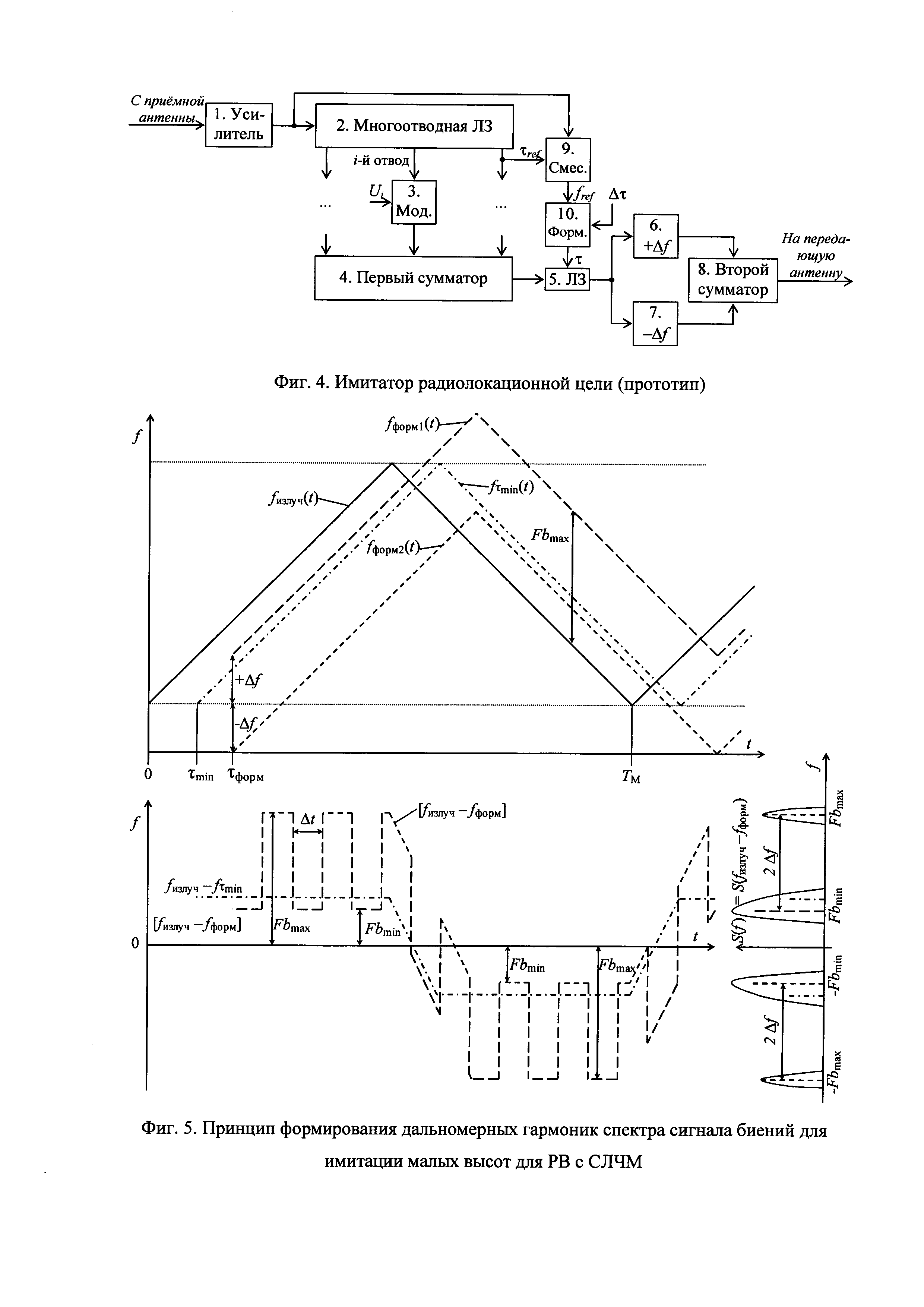
Для таких случаев в имитаторе ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией [7] предложено формировать отраженный сигнал из суммы двух смещенных по частоте копий зондирующего сигнала - см. фиг. 4. Смещение по частоте выполняется на одну и ту же величину «Δƒ», но с противоположными знаками: «+Δƒ» и «-Δƒ». Дополнительно делается задержка исходного сигнала в регулируемой линии задержки на величину задержки «τ». При этом «τ» определяет смещение всего портрета имитируемой цели по дальности в меньшую (при τ<Δƒ/Vƒ, где Vƒ - модуль скорости линейного изменения частоты радиолокатора, Δƒ - параметр, выбираемый примерно равным или больше ширины избирательного фильтра захвата/сопровождения цели в радиолокаторе) или в большую сторону (при τ>Δƒ/Vƒ).
Используем далее устройство этого имитатора [7] в качестве прототипа, как наиболее близкое по конструкции и принципу работы к заявляемому устройству имитатора ложной радиолокационной цели.
Устройство на фиг. 4 [7] позволяет независимо от направления и сочетания знаков скорости линейного изменения частоты имитировать две одинаковые цели. При этом первая - основная цель может имитироваться на дальности меньше дальности носителя РЛС, а вторая цель будет отнесена по дальности и, при соответствующем выборе параметров, не будет мешать корректному слежению за основной целью. Достигаемый результат - имитация цели с дальностью больше или меньше дальности носителя как при аналоговой, так и при цифровой обработке сигнала, без ухудшения качества имитируемых портретов целей. Но возможно изменение конструкции с целью улучшения характеристик и упрощения аппаратной реализации.
Целью предлагаемого изобретения является упрощение конструкции (п. 1 формулы изобретения) улучшение характеристик (п. 2-3 формулы изобретения) имитатора ложной радиолокационной цели [7] при сохранении диапазонов изменения имитируемых параметров и без ухудшения качества имитируемых радиолокационных портретов целей при зондировании сигналами с различными видами линейной частотной модуляции.
Для упрощения аппаратной реализации вместо второго сумматора и двух устройств сдвига частоты можно использовать одно управляемое устройство сдвига частоты, причем для работы имитатора с НЛЧМ и СЛЧМ сигналами достаточно циклически менять только знак величины доплеровского сдвига Δƒ.
Пример уменьшения имитируемой дальности (высоты) при СЛЧМ путем периодической смены знака «плюс» либо «минус» для заданной величины сдвига по частоте Δƒ для всего сигнала сформированного ранее портрета имитируемой цели показан на фиг. 5.
Периодическая смена знака выполняется через равные интервалы времени, обозначим это значение Δt. Тогда, при непрерывном излучении выходной сигнал будет содержать равные Δt отрезки излученного сигнала со скачками фазы в моменты смены знака ±Δƒ, что в частотной области приведет к тому, что к исходным гармоникам сигнала добавятся гармоники, соответствующие сумме и разности частот «полезного» сигнала и частоты смены знака Fsign, умноженной на целое число [8], где Fsign=1/(2Δt). При выборе частоты смены знака Fsign в несколько раз ниже средней несущей частоты ƒ0, но выше полосы «полезных» частот модуляции сигнала (например, при Δt<
Принцип замены суммирования на «коммутацию слагаемых во времени» был предложен и реализован в устройстве имитаторов целей при зондировании преимущественно длительными сигналами [8]. В случае ЛЧМ сигналов он также верен, т.к. спектральная плотность радиолокационных зондирующих сигналов с ЛЧМ в каждый момент времени сосредоточена в узкой полосе частот, а значит, при корректном выборе параметров работы такого имитатора, нарушение мгновенных спектров и появление лишних скачков фазы не скажется на работе типового радиолокатора, т.к. поиск, захват и слежение за дальностью цели (и высотой полета в РВ) выполняются без учета фаз сигналов с усреднением в несколько элементов разрешения и, как правило, в несколько периодов модуляции и сканирования.
Поэтому в результате замены сумматора на переключаемый модулятор, также как и в прототипе, получается раздвоение спектров в каждый момент времени и в первом и во втором полупериодах. Две пары огибающих спектра (для точечной цели - только гармоники Fbmin и Fbmax) в общем спектре S(ƒ) будут разнесены по оси частот на 2 Δƒ - см. фиг. 5. Поэтому, для случая РВ с произвольным законом ЛЧМ, при Δƒ больше половины ширины полосы фильтра сигнала биений, высокочастотные гармоники будут подавлены или отброшены, т.к. по имитируемой дальности находятся далеко от цели (поверхности), а измеренное значение дальности будет соответствовать центру тяжести низкочастотной огибающей спектра с меньшим значением имитируемой дальности (высоты).
На фиг. 5 для сравнения показана также гармоника ƒτmin(t). Она соответствует сигналу с некоторой минимальной задержкой τmin без сдвига по частоте, ее положение в обоих полупериодах периода модуляции постоянно, и на фиг. 5 она попадает хвостовую часть низкочастотной огибающей спектра сигнала биений, т.е. правее гармоники Fbmin, получаемой при работе предлагаемой конструкции имитатора.
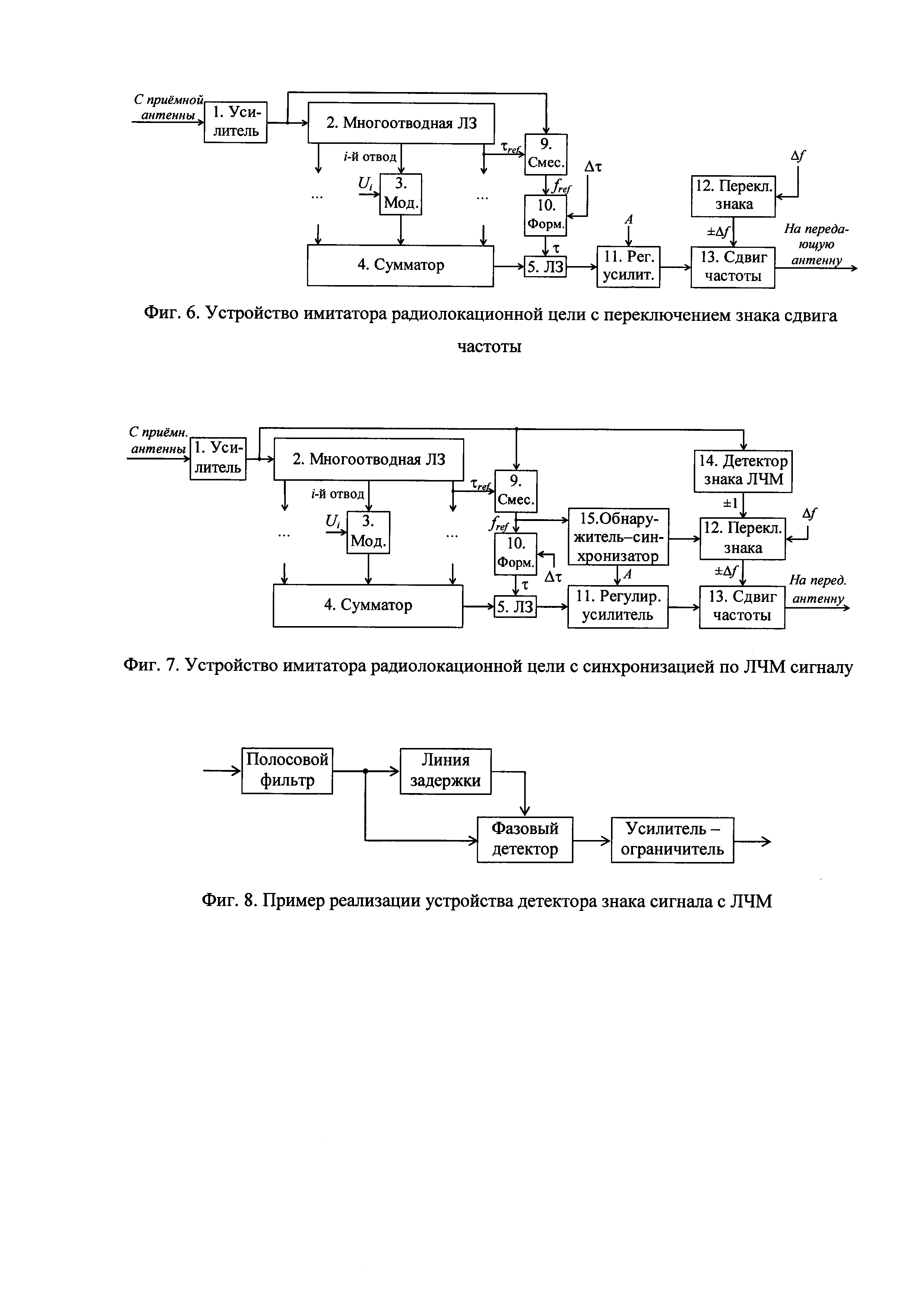
Таким образом, для упрощения конструкции прототипа (устройство на фиг. 4) вместо второго сумматора 8 и двух устройств сдвига частоты 6, 7 использованы регулируемый усилитель 11, переключатель знака 12 и одно устройство сдвига частоты 13. Устройство (п. 1 формулы изобретения) приведено на фиг. 6.
Устройство содержит (фиг. 6):
1 - усилитель сигнала (в рабочей полосе частот);
2 - многоотводная линия задержки;
3 - набор модуляторов;
4 - сумматор;
5 - переменная линия задержки;
9 - смеситель;
10 - устройство формирования задержки;
11 - регулируемый усилитель;
12 - переключатель знака;
13 - устройство сдвига частоты.
Устройство на фиг. 6 работает следующим образом. Зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает с приемной антенны через усилитель, многоотводную линию задержки, набор модуляторов, сумматор, переменную линию задержки, регулируемый усилитель и устройство сдвига частоты на выход имитатора. Многоотводная линия задержки обеспечивает имитацию блестящих точек цели(целей) с индивидуальными задержками. Индивидуальные амплитудные и фазовые модуляции выполняются с помощью соответствующих коэффициентов, формируемых внешним устройством.
Выходной сигнал получается путем сдвига частоты сигнала сформированного радиолокационного портрета цели, причем сдвиг частоты выполняется поочередно на «+Δf» и на «-Δf». Для этого используется переключатель знака, инвертирующий значение сдвига частоты через равные по времени интервалы Δt, т.е. частота смены сигнала на выходе переключателя знака Fsign=1/(2Δt). При выборе Fsign в несколько раз ниже средней несущей частоты ƒ0 и вне полосы «полезных» частот модуляции радиолокационного сигнала, с учетом фактического наличия во всех радиолокационных приемниках ограничивающих частотных фильтров сигнала, результирующий сигнал в рабочей (обычно низкочастотной) области по спектральному составу будет эквивалентен сигналу, образованному обычным суммированием сигналов [8].
Дополнительный регулируемый усилитель 11 необходим для сохранения мощности сигнала на частотах, соответствующих основной цели, т.к. из-за скачков частоты эквивалентная мощность низкочастотных гармоник уменьшается в 2 раза. Эффективная мощность сигнала в измерительном интервале РЛС и РВ также может снижаться, т.к. использование сдвигов частоты увеличивает длительность переходных «зон обращения». Для компенсации этих эффектов значение коэффициента усиления А, как правило (зависит от параметров РЛС и дальности), должно находиться в интервале от 2 до 3.
В зависимости от значения задержки τ в линии задержки выполняется имитация смещения имитируемой цели по дальности относительно дальности носителя:
в меньшую сторону при τ<τ0=Δƒ/Vƒ,
в большую сторону при τ>τ0,
где τ0 - задержка в имитаторе, при которой смещение цели по дальности отсутствует;
Δƒ - параметр, выбираемый примерно равным или больше ширины избирательного фильтра захвата и сопровождения цели в РЛС;
Vƒ - модуль скорости линейного изменения частоты РЛС, при СЛЧМ:

где W - ширина диапазона частот модуляции (см. фиг. 3);
TM - период модуляции.
При τ=0 и постоянном значении модуля скорости линейного изменения частоты РЛС положение имитируемой цели по дальности уменьшится на величину:

где с - скорость света.
Для реализации определения и учета возможного изменения скорости линейного изменения частоты зондирующего ЛЧМ сигнала, устройство содержит смеситель 9 и устройство формирования задержки 10. На выходе смесителя формируется сигнал ƒreƒ, с помощью которого в устройстве формирования задержки 10 находится значение скорости изменения частоты Vƒ и далее по поступающей из внешнего устройства величине требуемого смещения сигнала по задержке «Δτ» и выражению (4) находится значение задержки τ для переменной линии задержки 5:

где Tmin - собственная (внутренняя) задержка в цепях имитатора;
Δτ - требуемое смещение сигнала по задержке: при уменьшении имитируемой дальности или компенсации собственной задержки - значение со знаком минус;
τreƒ - величина задержки сигнала, взятого с любого удобного выхода многоотводной линии задержки 2.
Особенностью описанного решения для построения имитатора является то, что независимо от направления и сочетания знаков скорости линейного изменения частоты РЛС имитируются две одинаковые цели, причем первая - основная цель может имитироваться на дальности меньше дальности носителя РЛС, а вторая цель будет отнесена по дальности на 2⋅ΔRmax и при соответствующем выборе значения Δƒ не будет мешать корректному слежению РЛС за основной целью. Значение параметра Δƒ выбирается примерно равным или больше ширины избирательного фильтра захвата и сопровождения цели в РЛС (высоты в РВ), однако, с соблюдением условия корректной обработки принятого сигнала в РЛС: τ0<
В лабораторных условиях, а также при работе на летательном аппарате при низком уровне помех в сигнале с приемной антенны имеется возможность определения не только модуля скорости линейного изменения частоты, но и знака скорости линейного изменения частоты зондирующего ЛЧМ сигнала. Это позволяет улучшить качественные характеристики, выполняя сдвиг частоты только в нужную сторону, а значит, гармоники, соответствующие второй цели будут отсутствовать в выходном сигнале такого имитатора.
Для достижения этого результата устройство дополняется (п. 2 формулы изобретения) детектором знака ЛЧМ, на вход которого подается сигнал с усилителя 1. Сигнал с выхода детектора знака ЛЧМ поступает на дополнительный второй вход переключателя знака величины сдвига частоты: например, это может быть значение «±1», где «+1» должно соответствовать «+Δƒ» на выходе переключателя знака, а «-1» должно соответствовать «-Δƒ» на выходе переключателя знака.
Пример реализации детектора знака ЛЧМ зондирующего сигнала на основе фазового детектора приведен на фиг. 8. Длительность задержки сигнала, подаваемого на второй вход фазового детектора, должна быть не более четверти периода высокочастотного сигнала при его максимальном значении: τd
При цифровой обработке сигнала детектор знака ЛЧМ 14 можно реализовать путем определения знака разности фаз на выходе квадратурного умножителя входного сигнала на этот же сигнал, задержанный на 1 такт. По аналогичным принципам может быть реализован смеситель 9 для формирования сигнала ƒreƒ [12].
Детектор знака ЛЧМ и переключатель знака настраиваются так, чтобы положительному значению скорости изменения частоты входного сигнала соответствовало «+Δƒ» на входе устройства сдвига частоты.
При работе на борту летательного аппарата уровень помех и уровень полезного сигнала могут меняться в больших пределах, что может привести к некорректной работе детектора знака ЛЧМ и переключателя знака, управляющего устройством сдвига частоты. Поэтому целесообразно дополнить измерение параметров ЛЧМ сигнала оценкой мощностных характеристик сигнала с приемной антенны, для того чтобы подстраивать параметры работы имитатора.
Для достижения этого результата устройство дополняется (п. 3 формулы изобретения) обнаружителем-синхронизатором 15 - см. фиг. 7.
Обнаружитель-синхронизатор оценивает характеристики преобразованного в смесителе 9 сигнала и задает соответствующий режим работы имитатора. Например, следующим образом: при недостаточном уровне сигнала выбирается режим работы имитатора с периодической сменой знака сдвига частоты модуляции с равными интервалами Δt, не зависящими от выходного сигнала детектора знака ЛЧМ, на регулируемый усилитель выдается значение усиления, например, в диапазоне А=2…3. При достаточном уровне сигнала детектор знака ЛЧМ должен корректно следить за знаком изменения частоты ЛЧМ сигнала, поэтому устанавливается режим работы имитатора, при котором сдвиг частоты модуляции определяется выходным сигналом детектора знака ЛЧМ, на регулируемый усилитель выдается значение усиления, например, в диапазоне А=1…1,5.
Управление амплитудой А в зависимости от режима работы имитатора позволяет улучшить энергетические характеристики, снизив в 2 раза (относительно п. 1-2 формулы изобретения) уровень излучаемого сигнала имитации цели при корректном определении знака изменения частоты ЛЧМ входного сигнала. При отсутствии входного сигнала с заданными/ожидаемыми параметрами, в том числе при прерывистом или импульсном зондирующем сигнале РЛС, для дальнейшего улучшения энергетических характеристик, на регулируемый усилитель может быть выдано значение усиления А=0.
При реализации устройства имитатора по п. 1-3 формулы изобретения линии задержки, модуляторы и сумматоры могут быть аналоговыми или цифровыми. Для повышения качества имитации формирование сигнала лучше выполнять в цифровом виде на цифровых линиях задержки и модуляторах.
Пример структуры имитатора радиолокационной цели, обеспечивающей формирование эквивалентной суммы сигналов разнесенных по дальности элементов протяженной цели(ей) с использованием СБИС 1879BM3(DSM) разработки ЗАО НТЦ «Модуль» [13], приведен в [14].
Регулируемый усилитель 11, используемый для сохранения мощности сигнала на частотах, соответствующих основной цели, а также для возможных дополнительных флуктуаций мощности, повышающих реалистичность имитации целей, в конкретной реализации имитатора может быть совмещен с усилителем 1.
Дополнительные усилители, аттенюаторы для согласования уровней и возможные смесители, например с сигналом гетеродина для согласования рабочей полосы частот блоков обработки сигналов, могут быть использованы и рассчитаны в соответствии с [9].
Для исключения попадания выходного сигнала с передающей антенны на вход приемной антенны можно использовать циркулятор, стробирование работы и/или пространственное разнесение антенн [1, стр. 184]. При стационарных испытаниях возможно непосредственное подключение кабелей к исследуемой радиолокационной системе без использования антенн.
Литература
1. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием / Под. Ред. Ю.М. Перунова. Изд. 2-е, испр. и дополн. - М.: «Радиотехника», 2008. - 416 с.
2. Патент US 2008/018525. Radio frequency signature augmentation system. Дата публикации: 23.09.1986 (фиг. 22).
3. Патент US 5892479. Electromagnetic target generator. Дата публикации: 06.04.1999.
4. Патент FR 2596164. Method for deceiving a sonar or radar detector, and a decoy for implementing the method. Дата публикации: 25.09.1987.
5. Патент US 4613863. Electronic augmentation of radar targets. Дата публикации: 23.09.1986 (фиг. 2).
6. Патент GB 2134740. Electronic augmentation of radar techniques. Дата публикации: 15.08.1984.
7. Патент RU 2486540. Имитатор ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией / А.С. Боков, Н.А. Дядьков, В.Г. Важенин, В.В. Мухин, Д.Е. Щербаков, Л.И. Пономарев. Дата приоритета: 05.12.2011.
8. Патент RU 2504799. Имитатор радиолокационной цели при зондировании преимущественно длительными сигналами / А.С. Боков, Н.А. Дядьков, В.Г. Важенин, В.В. Мухин, Д.Е. Щербаков, Л.И. Пономарев. Дата приоритета: 05.12.2011.
9. Патент RU 2412449. Имитатор радиолокационной цели. Дата приоритета: 26.12.2008.
10. Виницкий А.С. Очерк основ радиолокации при непрерывном излучении радиоволн. М.: Сов. радио, 1961. - 496 с.
11. Саломасов В.В. Особенности имитации отраженного сигнала для РЛС с ЛЧМ / В.В. Саломасов, А.А. Щербаков // Известия вузов. Радиоэлектроника. М., 1987, т. 30. Стр. 84-86.
12. International publication WO 2013/184232 A1. Wideband low latency repeater and methods. Дата приоритета: 08.06.2012 (US).
13. Микросхема интегральная 1879BM3(DSM), Техническое описание, Версия 1.1, ЮФКВ 431268 001 TO1 К, Научно-технический центр «Модуль». М., 2002.
14. Патент RU 2568899. Имитатор радиолокационной цели при зондировании преимущественно длительными сигналами / А.С. Боков, Н.А. Дядьков, В.Г. Важенин, В.В. Мухин, Д.Е. Щербаков, Л.И. Пономарев. Дата приоритета: 07.03.2014.
Реферат
Изобретение относится к устройствам, предназначенным для имитации частотно-временной структуры радиолокационного сигнала, отраженного от подстилающей поверхности, от одной или нескольких целей, находящихся на фиксированном направлении, и может быть использовано, например, для имитации ложных целей, в том числе расположенных ближе носителя, для имитации боевой работы радиолокационной системы, а также для имитации эхо-сигналов радиовысотомеров при зондировании сигналами с различными видами линейной частотной модуляции. Достигаемый результат - имитация цели с дальностью больше или меньше дальности носителя, независимо от величины, направления и сочетания знаков скорости линейного изменения частоты зондирующего сигнала. Указанный результат достигается за счет того, что осуществляется динамическое изменение параметров имитации, в том числе в соответствии с параметрами входного зондирующего сигнала. 2 з.п. ф-лы, 8 ил.
Комментарии