Способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой - RU2708371C1
Код документа: RU2708371C1
Чертежи


Описание
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС), в которых в качестве антенны используется активная фазированная антенная решетка.
Конечной задачей радиолокационных измерений в большинстве случаев является определение траектории цели на некотором интервале времени [1 - Теоретические основы радиолокации: учебн. пособие для вузов / под ред. В.Е. Дулевича, М.: Сов. радио. 1978. 608 с. - С. 567]. Для описания траектории, как непрерывной функции времени, обычно используют полиномиальную модель в виде конечной суммы непрерывных базисных функций с постоянными коэффициентами. При этом необходимое число измерений координат цели для определения ее траектории пропорционально числу членов ряда, описывающего траекторию. Пусть необходимое число измерений координат цели для определения ее траектории равно М. Предположим, что вновь обнаруженные отметки целей равномерно распределены в пределах зоны обзора радиолокационной станции. Если новая отметка цели обнаруживается в течение периода обзора пространства Т, то для определения траекторий всех вновь обнаруженных целей потребуется период времени, равный ТМ.
Следует отметить, что время построения траектории одной цели может быть больше, чем ТМ, в том случае, если данная цель в течение очередного периода обзора пространства оказалась пропущенной. В связи с этим под периодом построения траектории цели будем понимать среднее время сбора радиолокационной информации, содержащее необходимое число отметок для определения траектории цели. В общем случае необходимо стремиться к тому, чтобы сократить период построения траектории цели.
Задачу обзора воздушного пространства для обнаружения целей наиболее просто решают путем излучения радиолокационного импульса в угловом секторе пространства, занимаемом лучом, и приема отраженного от цели сигнала в этом же угловом секторе. Высокая угловая разрешающая способность достигается при использовании узкой диаграммы направленности антенны, размеры которой значительно меньше угловой зоны обзора. Однако применение узкой диаграммы направленности антенны для обнаружения и измерения координат всех целей, находящихся в зоне действия радиолокационной станции, приводит к необходимости разбиения зоны обзора на ряд угловых пространственных каналов и требует проведения обзора этого пространства. Для достижения максимальной дальности действия радиолокационной станции луч должен иметь минимальную ширину и игольчатую форму, а время ожидания отраженного сигнала прямо пропорционально связано с дальностью действия радиолокационной станции. Просмотр всей зоны обзора занимает достаточно большое время обнаружения целей из-за больших интервалов между зондированиями [2 - Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника». 2006. с. 182-188].
Недостатком этого способа является низкая скорость обзора пространства, поскольку угловой сектор, занимаемый игольчатым лучом, существенно меньше, чем зона обзора радиолокационной станции, а время ожидания отраженных сигналов максимально.
Повышения скорости обзора пространства можно добиться, если расширить передающий и приемный лучи. Однако в этом случае при ограниченном времени на обнаружение целей необходимо увеличивать мощность передатчика. Один из способов, реализуемый в радиолокационной станции с цифровой активной фазированной антенной решеткой, предложен в патенте [3 - RU 2610833. Способ обзора пространства / В.В. Задорожный, А.Ю. Ларин, А.В. Литвинов, И.С. Омельчук, А.С. Помысов. Опубл. 16.02.2017, МПК G01S 13/00]. Согласно способу в каждом азимутальном положении диаграммы направленности в режиме передачи цифровая антенная решетка формирует веерную передающую диаграмму направленности в угломестной плоскости, в режиме приема принимаемые отраженные сигналы с выходов антенных элементов представляются в виде цифровых отсчетов, из которых путем взвешенного суммирования формируется приемная многолучевая в угломестной плоскости диаграмма направленности с лучами игольчатой формы, при этом азимутальной координатой обнаруженных объектов является текущее азимутальное положение диаграммы направленности.
Недостатком указанного способа является незначительное увеличение скорости обзора пространства, обусловленное тем, что время ожидания отраженных сигналов также соответствует максимальной дальности действия радиолокационной станции. Поэтому достигнутое повышение скорости обзора пространства пропорционально отношению ширины веерной диаграммы направленности и ширины игольчатого луча.
Известен способ обзора пространства [4 - RU 2626407. Способ радиолокационного обзора / В.И. Кисляков, С.Н. Лужных. Опубл. 27.07.2017, МПК G01S 13/00], в котором зону обзора пространства по углу места разделяют на две перекрывающиеся части, отличающиеся шириной углового сектора. Если при обзоре пространства в широкой части все сопровождаемые цели попадают в более узкий угловой сектор, то в следующий период обзора в данной части пространства просматривают только узкий сектор пространства и наоборот. Изменение ширины углового сектора позволяет соответствующим образом экономить энергетические и временные ресурсы радиолокационной станции и, в частности, уменьшать время обзора пространства.
Недостаток способа заключается в том, что реализация способа требует наличия априорной информации о пространственном распределении сопровождаемых целей. Появление новых целей вне просматриваемого углового сектора может привести к их пропуску.
Известен способ радиолокационного обзора [5 - RU 2400768. Способ радиолокационного обзора зоны пространства / Б.Г. Беляев, Г.Н. Голубев, В.А. Жибинов, С.Н. Лужных. Опубликовано 27.09.2010, МПК G01S 13/00]. Способ включает последовательный осмотр угловых направлений, поочередный пропуск осмотра угловых направлений на каждом периоде обзора, принятие решения об обнаружении цели, если уровень принятого сигнала превысил порог обнаружения. По сигналу, превысившему дополнительный порог, но не превысившему порог обнаружения, формируют строб обзора на следующий период, в котором входящие в него угловые направления осматривают без пропуска. В указанном способе вводится дополнительный порог, более низкий, чем порог обнаружения. Дополнительный порог устанавливают, исходя из допустимой вероятности ошибочного осмотра угловых направлений, подлежащих пропуску. Если принятый сигнал при осмотре направления не превысил основной порог обнаружения, но превысил дополнительный, то следует предположить, что это отраженный сигнал от еще не обнаруженной цели, и по мере ее приближения к радиолокационной станции она может быть обнаружена, когда сигнал превысит порог обнаружения.
Недостатком указанного способа является несущественное уменьшение времени обзора пространства, поскольку за счет низкого значения дополнительного порога растет вероятность ложной тревоги, что сократит количество пропускаемых угловых направлений при сложной реализации способа.
В последние годы в ряде стран за рубежом идет интенсивная модернизация активных фазированных антенных решеток с использованием принципа цифрового диаграммообразования - так называемой цифровой активной фазированной антенной решетки [6 - Добычина Е.М, Малахов Р.Ю. Цифровой приемо-передающий модуль активной фазированной антенной решетки. // Научный вестник МГТУ ГА, 2014, №209, с. 117-123]. Основным элементом подобной системы служит цифровой приемо-передающий модуль либо приемо-передающий модуль с цифровой обработкой принятых отраженных сигналов. Это позволяет использовать многолучевой режим работы хотя бы в одной плоскости.
Наиболее близким по технической сущности (прототипом) заявляемого способа обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой является способ [7 - RU 2623579. Способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой / О.С. Алексеев, Г.Ф. Мосейчук, А.Н. Грибанов, Г.В. Кауфман, И.Н. Матвеев, Д.С. Лавренюк. Опубл. 28.06.2017, МПК G01S 13/00]. В соответствии с данным способом в исходной угловой позиции формируют передающую и приемную диаграммы направленности антенны, излучают зондирующие импульсы в виде пачки импульсов, принимают отраженные от целей импульсы, при этом на время излучения зондирующих импульсов запирают приемные каналы приемо-передающих модулей активной фазированной антенной решетки, при этом приемную и передающую диаграммы направленности формируют независимо друг от друга активной фазированной антенной решеткой, а после излучения зондирующих импульсов перемещают передающую диаграмму направленности в новую угловую позицию, а приемную диаграмму направленности оставляют на исходной угловой позиции до момента приема всех отраженных от цели импульсов излученной пачки, после чего перемещают приемную диаграмму направленности в новую угловую позицию, повторяют описанную последовательность действий для необходимого количества угловых позиций.
Недостаток способа состоит в том, что одновременный прием импульсов, отраженных от целей, расположенных в угловой позиции, соответствующей новой угловой позиции передающей диаграммы направленности, и расположенных в исходной угловой позиции передающей диаграммы направленности, может привести к ошибкам определения координат целей или пропуску целей. В связи с этим при реализации способа будут иметь место пропуски элементов дальности, обусловленные отставанием приемной диаграммы направленности от передающей диаграммы направленности в новой угловой позиции. Кроме того, для реализации способа необходимо, чтобы в составе каждого приемо-передающего модуля активной фазированной антенной решетки имелись два фазовращателя: на прием и на передачу, что позволяет сформировать независимые диаграммы направленности на прием и на передачу. Однако отсутствие возможности цифрового диаграммообразования и, как следствие, формирования многолучевых приемных диаграмм направленности, лишь не существенно снижает время обзора пространства.
Техническая проблема, на решение которой направлено предлагаемое техническое решение, состоит в сокращении периода построения траектории обнаруженных целей в зоне обзора.
Для решения указанной технической проблемы предлагается способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой, при котором в заданной азимутальной позиции формируют передающую и приемную диаграммы направленности независимо друг от друга активной фазированной антенной решеткой, излучают зондирующие сигналы в виде пачки импульсов при запертых приемных каналах приемо-передающих модулей активной фазированной антенной решетки, осуществляют прием сигналов приемной диаграммой направленности, находящейся в заданной азимутальной позиции, в виде пачки отраженных от цели импульсов.
Согласно изобретению, в заданной азимутальной позиции передающую диаграмму направленности активной фазированной антенной решетки формируют в виде веерного луча, расширенного в угломестной плоскости, а приемную диаграмму направленности с помощью активной фазированной антенной решетки с цифровым диаграммообразованием - в виде многолучевой диаграммы направленности в угломестной плоскости из N лучей игольчатой формы, одновременный прием сигналов осуществляют до момента приема отраженных от целей импульсов излученной пачки в N1 приемных лучах, перемещают передающую диаграмму направленности в новую азимутальную позицию и излучают зондирующие сигналы в виде пачки импульсов при запертых приемных каналах приемо-передающих модулей активной фазированной антенной решетки, перемещают N1 приемных лучей диаграммы направленности в новую азимутальную позицию, осуществляют одновременный прием сигналов в N1 лучах, расположенных в новой азимутальной позиции, и N-N1 лучах, расположенных в заданной азимутальной позиции, до момента приема отраженных от целей импульсов излученной пачки во всех приемных лучах, установленных в заданной азимутальной позиции, после чего повторяют описанную последовательность действий для необходимого количества азимутальных позиций.
Техническим результатом является уменьшение периода определения траекторий обнаруженных целей в зоне обзора.
Таким образом, предлагаемый способ имеет следующие отличительные признаки и последовательность его реализации от способа-прототипа, которые приведены в таблице 1.
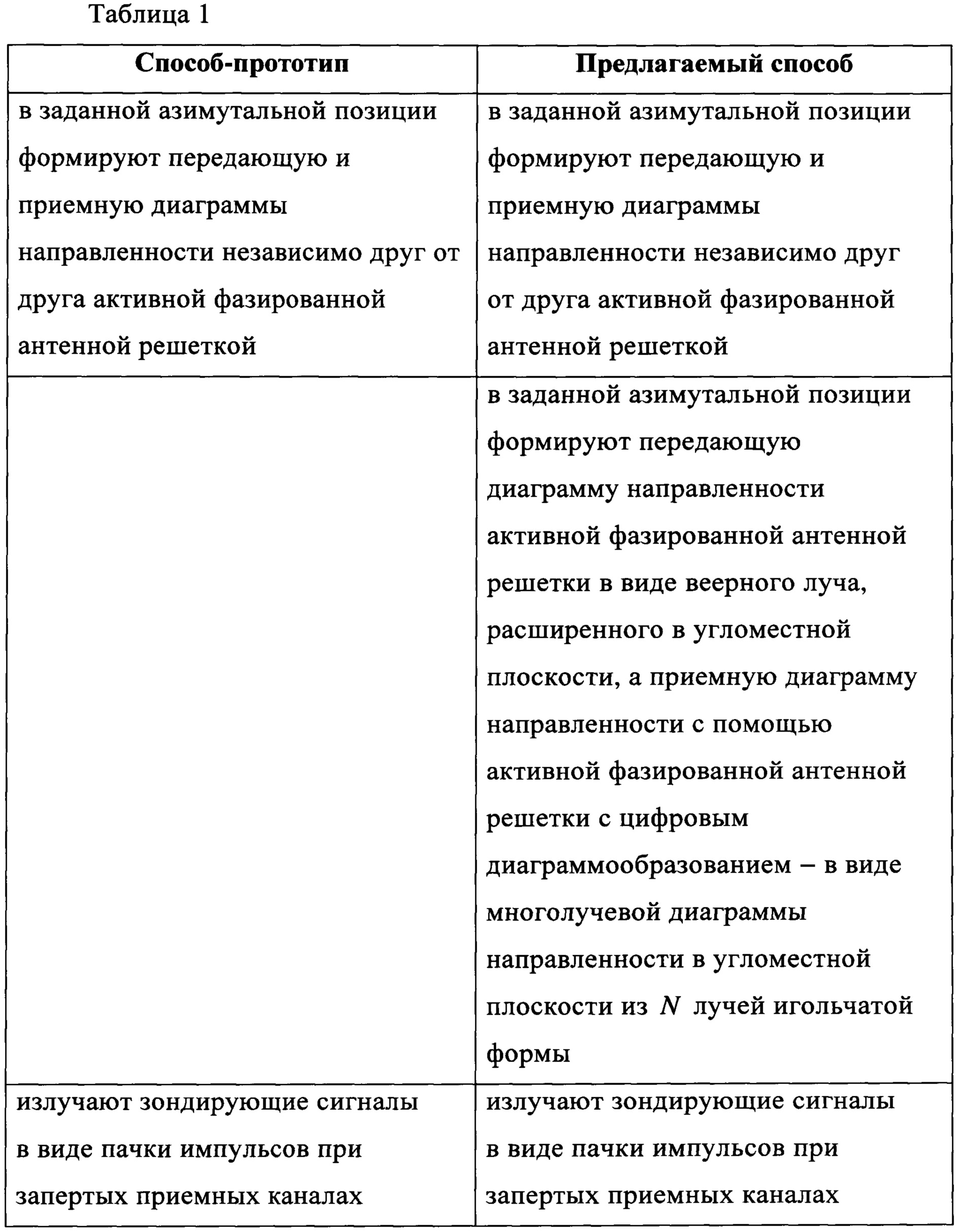
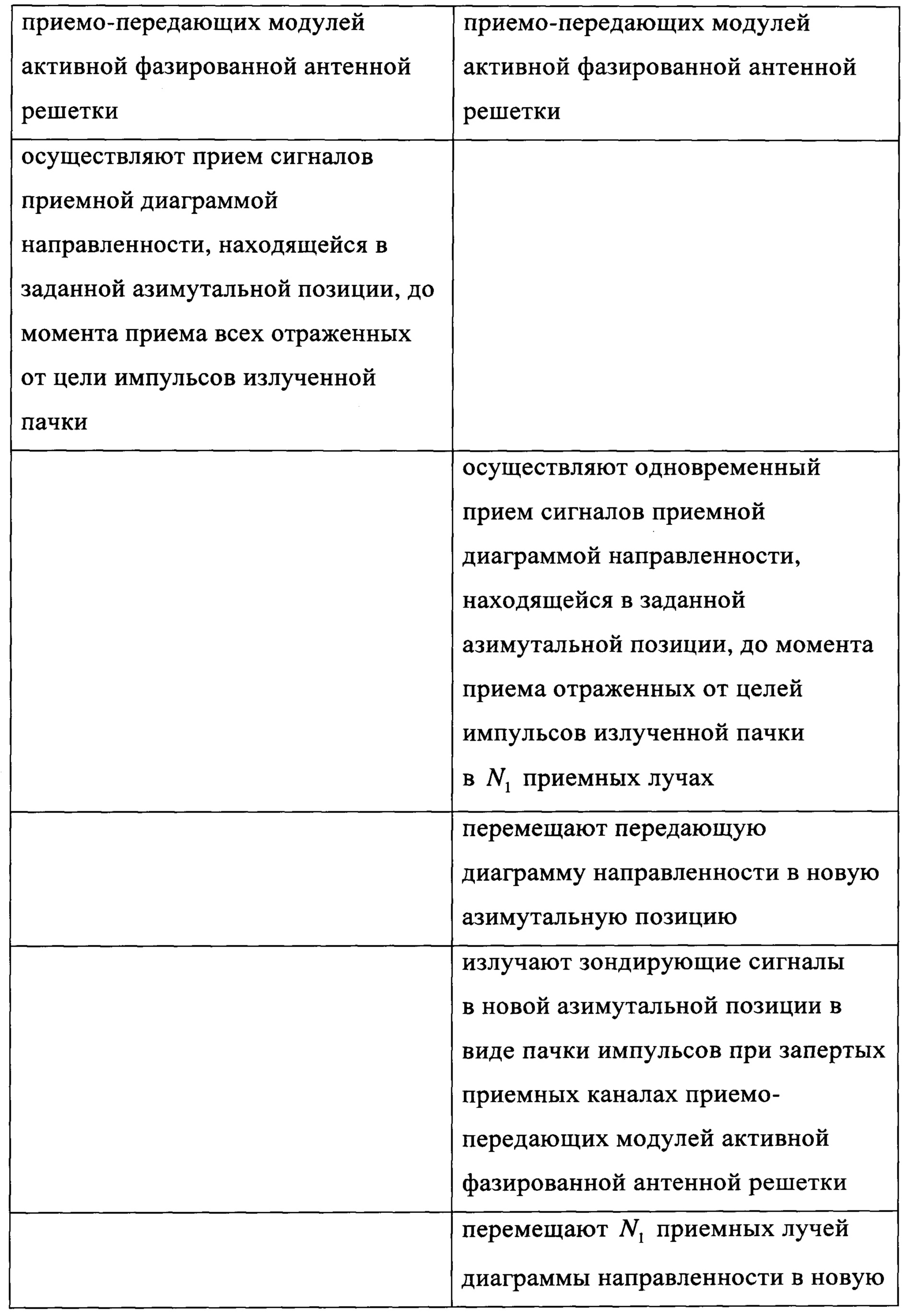

Из представленной таблицы 1 сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе введена операция:
- осуществляют одновременный прием сигналов в N1 лучах, расположенных в новой азимутальной позиции, и N-N1 лучах, расположенных в заданной азимутальной позиции, до момента приема отраженных от целей импульсов излученной пачки во всех приемных лучах, установленных в заданной азимутальной позиции,
а также изменены последовательность выполнения и режимы выполнения шести операций:
- в заданной азимутальной позиции передающую диаграмму направленности активной фазированной антенной решеткой формируют в виде веерного луча, расширенного в угломестной плоскости, а приемную диаграмму направленности - в виде многолучевой диаграммы направленности в угломестной плоскости из N лучей игольчатой формы;
- осуществляют одновременный прием сигналов до момента приема отраженных от целей импульсов излученной пачки в N1 приемных лучах;
- перемещают передающую диаграмму направленности в новую азимутальную позицию;
- излучают зондирующие сигналы в новой азимутальной позиции в виде пачки импульсов при запертых приемных каналах приемо-передающих модулей активной фазированной антенной решетки;
- перемещают N1 приемных лучей диаграммы направленности в новую азимутальную позицию, а остальные N-N1 приемных лучей диаграммы направленности оставляют в заданной азимутальной позиции;
- осуществляют одновременный прием сигналов в N1 лучах, расположенных в новой азимутальной позиции, и N-N1 лучах, расположенных в заданной азимутальной позиции, до момента приема отраженных от целей импульсов излученной пачки во всех приемных лучах, установленных в заданной азимутальной позиции.
Введение одной операции и изменение последовательности выполнения и режимов шести операций позволяет, по сравнению со способом-прототипом, обеспечить достижение технического результата, состоящего в уменьшении периода определения траекторий обнаруженных целей в зоне обзора.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемого технического решения, отсутствуют в известных источниках из уровня техники, что указывает на соответствие заявляемого способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
Сущность предлагаемого способа раскрывается фигурами 1-3.
На фигуре 1 приведена упрощенная структурная схема активной фазированной антенной решетки с цифровым диаграммообразованием в приемном тракте, реализующей предлагаемый способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой (АФАР).
На фиг. 2 и 3 приведены пространственно-временные диаграммы, иллюстрирующие порядок обзора пространства в соответствии с существующим способом обзора пространства в АФАР с многолучевой приемной диаграммой направленности (ДН) и предлагаемым способом.
При реализации предложенного способа обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой выполняется следующая последовательность действий:
- в заданной азимутальной позиции формируют независимо друг от друга передающую и приемную диаграммы направленности, причем передающую диаграмму направленности формируют в виде веерного луча, расширенного в угломестной плоскости, с помощью активной фазированной антенной решетки, а приемную диаграмму направленности с помощью активной фазированной антенной решетки с цифровым диаграммообразованием - в виде многолучевой диаграммы направленности в угломестной плоскости из N лучей игольчатой формы - 1;
- излучают зондирующие сигналы в виде пачки импульсов при запертых приемных каналах приемо-передающих модулей активной фазированной антенной решетки - 2;
- прием сигналов осуществляют до момента приема отраженных от целей импульсов излученной пачки в N1 приемных лучах - 3;
- излучают зондирующие сигналы в виде пачки импульсов при помощи передающей диаграммы направленности, установленной в новую азимутальную позицию, при запертых приемных каналах приемо-передающих модулей активной фазированной антенной решетки - 4;
- перемещают N1 приемных лучей диаграммы направленности в новую азимутальную позицию - 5;
- осуществляют одновременный прием сигналов в N1 лучах, расположенных в новой азимутальной позиции, и N-N1 лучах, расположенных в заданной азимутальной позиции, до момента приема отраженных от целей импульсов излученной пачки во всех приемных лучах, установленных в заданной азимутальной позиции - 6;
- повторяют описанную последовательность действий для необходимого количества азимутальных позиций - 7.
Предлагаемый способ предназначен для использования в активной фазированной антенной решетке с цифровым диаграммообразованием в приемном тракте.
Активная фазированная антенная решетка с цифровым диаграммообразованием в приемном тракте (фиг. 1) включает вычислитель (ЭВМ) 1, блок формирования передающей ДН (БФПрДН) 2, блок формирования сигнала (БФС) 3, N фазовращателей (ФВ1…ФВN) 4, N усилителей мощности (УМ1…УМN) 5, N циркуляторов (Ц1…ЦN) 6, N антенных элементов (АЭ1…АЭN) 7, N ключей (КЛ1…КЛN) 8, N приемников (ПрМ1…ПрМN) 9, N аналого-цифровых преобразователей (АЦП1…АЦПN) 10.
ЭВМ 1 содержит два входа и два выхода. Первый вход ЭВМ 1 является входом АФАР. Первый выход ЭВМ 1 подключен ко входу БФПрДН 2, который имеет три выхода. Первый выход БФПрДН 2 связан со входом БФС 3, второй выход БФПрДН 2 подключен к первым входам каждого из N ФВ1…ФВN 4. Выход БФС 3 подключен ко вторым входам каждого из N ФВ1…ФВN 4. Выход каждого ФВ1…ФВN 4 связан со входом соответствующего УМ1…УМN 5, а выход каждого УМ1…УМN 5 подключен к первому входу одного из N Ц1…ЦN 6. Второй вход (выход) каждого из Ц1…ЦN 6 подключен к соответствующему входу АЭ1…АЭN 7. Первый вход каждого из КЛ1…КЛN 8 подключен к третьему выходу БФПрДН 2. Третий выход каждого из Ц1…ЦN 6 связан со вторым входом соответствующего КЛ1…КЛN 8. Выходы каждого из N КЛ1…КЛN 8 соединены со входом одного из ПрМ1…ПрМN 9, выход каждого ПрМ1…ПрМN 9 подключен ко входу одного из N АЦП1…АЦПN 10. Выходы всех АЦП1…АЦПN 10 связаны со вторым входом ЭВМ 1. Второй выход ЭВМ 1 является выходом устройства.
Для упрощения на приведенной структурной схеме активной фазированной антенной решетки с цифровым диаграммообразованием не показаны цепи синхронизации и гетеродинирования.
Устройство работает следующим образом. На вход ЭВМ 1 поступает команда, содержащая направление области пространства, в которое должен быть помещен передающий луч. ЭВМ 1 рассчитывает или извлекает из своей памяти необходимые фазы каналов АФАР для формирования передающей ДН АФАР, ориентированной в заданном направлении, и передает эти фазы в БФПрДН 2, который обеспечивает запуск БФС 3, управление ФВ1…ФВN 4, и перевод КЛ1…КЛN 8 в отключенное состояние в течение периода излучения зондирующих сигналов в виде пачки импульсов РЛС. По окончании периода излучения зондирующих сигналов БФПрДН 2 переводит все КЛ1…КЛN 8 во включенное состояние. В БФС 3 по команде БФПрДН 2 формируется высокочастотный сигнал, который при запуске БФС 3 проходит через ФВ1…ФВN 4 передающей части всех каналов АФАР, приобретая при этом необходимые фазовые задержки в каждом канале АФАР, и поступает на входы соответствующих УМ1…УМN 5. В каждом УМ1…УМN 5 происходит усиление входного высокочастотного сигнала до необходимого уровня. Выходные сигналы УМ1…УМN 5 поступают на соответствующие первые входы Ц1…ЦN 6, при этом выходной сигнал присутствует только на вторых выходах Ц1…ЦN 6, которые связаны со входами АЭ1…АЭN 7 АФАР. АЭ1…АЭN 7 обеспечивают преобразование энергии токов высокой частоты в энергию электромагнитных колебаний, которые излучаются в пространство в течение длительности излучения зондирующих сигналов. При наличии на пути электромагнитных волн объектов электромагнитные волны отражаются в сторону АФАР. Энергия электромагнитных колебаний в АЭ1…АЭN 7 преобразуется в энергию токов высокой частоты, которые поступают на вторые входы Ц1…ЦN 6. При этом выходной сигнал будет присутствовать только на третьем выходе каждого Ц1…ЦN 6. Выходные сигналы с выходов Ц1…ЦN 6 поступают на входы КЛ1…КЛN 8. Если КЛ1…КЛN 8 находятся во включенном состоянии (т.е. период излучения зондирующих сигналов закончен), то токи высокой частоты беспрепятственно проходят через КЛ1…КЛN 8 и поступают на входы ПрМ1…ПрМN 9, в которых осуществляется перенос колебаний токов высокой частоты на промежуточную частоту, усиление и демодуляция. Сигналы с выходов ПрМ1…ПрМN 9 поступают на входы АЦП1…АЦПN 10, в которых осуществляется квантование и дискретизация выходных сигналов ПрМ1…ПрМN 9. Цифровой сигнал с выходов каждого АЦП1…АЦПN 10 поступает на второй вход ЭВМ 1, в которой осуществляется обработка принятых сигналов с целью расчета пространственных координат объектов и построения их траекторий движения. Со второго выхода ЭВМ 1 поступает список обнаруженных объектов и их траектории, которые могут быть визуализированы на дисплее оператора РЛС.
Для теоретического обоснования способа обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой изложим следующее.
В простейшем случае период обзора пространства состоит в последовательном просмотре всех разрешимых по углу секторов пространства. Число таких угловых элементов разрешения равно отношению
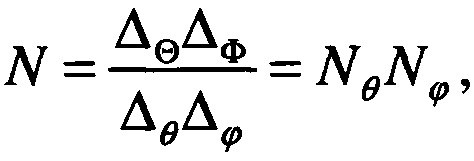
где ΔΘ, ΔΦ - угловые размеры зоны обзора пространства по углу места и по азимуту;
Δθ, Δϕ - ширина луча по уровню -3 дБ по углу места и по азимуту соответственно;
Nθ, Nϕ - число разрешимых направлений по углу места и по азимуту соответственно.
В каждом из этих направлений луч задерживается на период времени, равный максимальному времени прихода отраженных сигналов от целей, размещенных на дальностях в пределах границы зоны обзора. Граница зоны обзора обычно зависит от угломестной координаты, поэтому обозначим ее R0(θ). В связи с этим время ожидания отраженных сигналов равно
а период последовательного обзора пространства равен
В настоящее время в РЛС с антенными решетками реализуют секторный обзор пространства, при котором период обзора пространства может быть сокращен. В этом случае широкий передающий луч обеспечивает «подсветку» области пространства по углу места. При этом вдоль передающего луча располагают сетку приемных лучей, пересекающихся по уровню минус 3 дБ.
Период обзора пространства такой РЛС равен
где Rmax - максимальная дальность действия РЛС.
Недостаток секторного способа обзора пространства состоит в том, что дальность действия РЛС вдоль различных угломестных направлений существенно отличается. Например, лучу с максимальной угломестной координатой относительно плоскости горизонта обычно соответствует дальность несколько десятков километров (20…50 км). При этом дальность действия РЛС вдоль горизонта может составлять несколько сотен километров (150…400 км). В связи с этим часть приемных лучей в системе секторного обзора пространства значительную часть времени обзора не используют.
Это означает, что в течение секторного периода обзора может быть получено больше радиолокационной информации, увеличено число обнаруженных отметок целей в течение периода обзора пространства и, следовательно, сокращено время определения траектории целей за счет перераспределения в пространстве приемных лучей в процессе периода Tpar.
Увеличение числа обнаруженных отметок целей может достигаться следующими путями:
1. Свободные приемные лучи могут быть перераспределены в направлениях, соответствующих максимальным боковым лепесткам передающей ДН.
2. Передающая ДН в азимутальной плоскости может быть расширена и не перекрываться исходной сеткой приемных лучей. По мере освобождения приемные лучи могут дополнять исходную сетку и осуществлять прием отраженных сигналов в направлениях, которые были подсвечены передающим лучом, но не перекрыты приемными лучами.
3. Сократить время ожидания приема отраженных сигналов и излучить зондирующие сигналы в виде пачки импульсов в новом направлении, начать прием сигналов в новой области пространства.
4. Излучить зондирующий сигнал в новом направлении, при этом прием сигналов осуществлять в новой области свободными лучами, а прием сигналов в ранее подсвеченной области продолжить занятыми лучами.
Недостаток первого пути состоит в том, что уровень боковых лепестков передающей ДН ниже, чем уровень основного луча, по крайней мере, на 13 дБ. При этом по боковым лепесткам могут приниматься только сигналы, отраженные от удаленных целей. Это означает, что обнаружение целей по боковым лепесткам возможно только при увеличении эффективной поверхности рассеяния (ЭПР) цели в пять и более раз.
Если пойти по второму пути, то это приведет к ограничению дальности действия РЛС. Например, если расширить передающий луч в два раза, то произойдет снижение коэффициента направленного действия (КНД) АФАР на 3 дБ. В случае твердотельной АФАР уменьшение энергетического потенциала составит 6 дБ. Это равносильно уменьшению дальности РЛС на 30%.
Третий путь, очевидно, также приведет к уменьшению дальности действия РЛС.
Четвертый способ является наиболее универсальным, однако, технически более сложным. Это, во-первых, связано с тем, что повторное излучение зондирующего сигнала в другом направлении требует отключения приемных каналов. Во-вторых, после излучения повторного зондирующего сигнала продолжение приема сигналов в области пространства, которая была подсвечена первым зондирующим сигналом, может сопровождаться повышением уровня шумов вследствие приема части мощности второго зондирующего импульса по боковым лепесткам.
Первая трудность приведет к тому, что сигналы, отраженные от целей в результате излучения первого зондирующего импульса и приходящие к РЛС в момент излучения второго зондирующего сигнала, будут проигнорированы РЛС.
Вторая проблема приведет к тому, что цели, находящиеся в дальней зоне РЛС, могут быть пропущены.
Чтобы разрешить указанные проблемы, излучение второго зондирующего сигнала можно осуществлять в разные моменты времени либо в дальнейшем дополнительно просматривать «потерянную» область пространства. Кроме того, при излучении второго зондирующего импульса следует обеспечить снижение уровня боковых лепестков (УБЛ) в направлении области, подсвеченной первым зондирующим импульсом. Этого можно достигнуть либо путем разнесения пространственных областей, в которых излучаются первый и второй зондирующий импульсы, либо использованием специальных фазовых распределений, полученных методами фазового синтеза нулей ДН в заданных направлениях. Для формирования приемных лучей в первой пространственной области следует также использовать амплитудно-фазовые распределения, обеспечивающие формирование нулей в направлении области, подсвечиваемой вторым зондирующим импульсом.
Рассмотрим технический результат, достигаемый в РЛС с электронно-механическим сканированием луча, при использовании предлагаемого способа. Пусть длительность излучения зондирующего импульса составляет 65 мкс. Дальность действия РЛС составляет 200 км, а максимальная высота полета обнаруживаемой цели составляет 20 км. По углу места РЛС работает в секторе от 0 до 60 градусов. Для приема сигналов РЛС использует N, равным 21, приемных лучей с шириной луча по углу места Δθ, равной три градуса по уровню половинной мощности, и Δϕ, равной два градуса - по азимуту. В таблице 2 приведены дальности действия РЛС в точках пересечения приемных лучей и время ожидания принимаемых сигналов в каждой из пространственных областей.


Из таблицы 2 видно, что время наблюдения целей в первом и 21-м лучах отличается почти на порядок. Таблица 2 также позволяет оценить объем пространства, просматриваемый каждым лучом и группой лучей.
По каждому лучу соответствующая оценка приведена в пятой колонке таблицы 2. Формула для расчета получена исходя из того, что объем шара для телесного угла 4π составляет V=4πR3/3, а для угла, заданного сектором
Отсюда следует, что при реализации существующего способа обзора пространства и выбранных параметров лучей при излучении одного импульса просматривается суммарный объем
Если выключить приемные каналы на время τ, равное 65 мкс, то это означает, что из просматриваемой области будет исключена область, протяженность которой по дальности составляет 19,5 км, а угловой сектор, из которого вырезали данную область, равен ΔθΔϕNz (Nz - число лучей, в которых ожидается прием сигналов).
После излучения зондирующего импульса, продолжения приема сигналов в первой пространственной области и дополнительного просмотра новой области пространства N-Nz лучами к просматриваемой области добавится новая область, которая может постепенно расширяться за счет постепенного переноса в новую пространственную область свободных лучей.
Пусть излучение второго зондирующего импульса выполнено в момент времени t, равный 0,504 мс. К этому моменту времени РЛС просмотрела сектор по дальности около 75 км. Число занятых лучей Nz осталось равным пяти. В момент излучения второго зондирующего импульса из области просмотра исключается сектор, равный ΔθΔϕNz=6⋅5=30° и 19,5 км по дальности.
Оставшееся время ожидания отраженных сигналов в первой области после излучения второго зондирующего сигнала равно
tneed=1,333-0,065-0,504=0,764 мс.
В течение этого времени РЛС способна дополнительно получить информацию о целях в угловом секторе
ΔθΔϕ(N-Nz)=6⋅16=96° и 114,6 км по дальности.
Если свободные лучи переориентировать в новое азимутальное положение и ориентировать в верхнюю часть контролируемого сектора пространства, то излучение дополнительного импульса в этом азимутальном направлении позволит дополнительно просмотреть 1,321⋅103 км3. Эти же лучи можно ориентировать и в нижнюю область пространства. Тогда дополнительно просматриваемый объем пространства увеличится и составит 4,885⋅103 км3.
Отсюда следует, что объем просматриваемого пространства в первом случае увеличится на 8,7%, а во втором - на 32,3%. При этом увеличение объема контролируемого пространства будет выполнено в течение того же интервала времени, что и при реализации обычного способа секторного обзора пространства. Это означает, что и скорость накопления радиолокационной информации вырастет таким же образом.
По мере просмотра пространства луч может возвращаться в те области, в которых присутствовал сектор с пропущенными элементами дальности и дополнительно записывать информацию о целях, находящихся в данной области пространства. В связи с этим можно принять, что при реализации предлагаемого способа следует чередовать ориентацию свободных лучей в верхнюю и нижнюю части угломестного сектора. При этом выигрыш в скорости накопления радиолокационной информации составит до 20%.
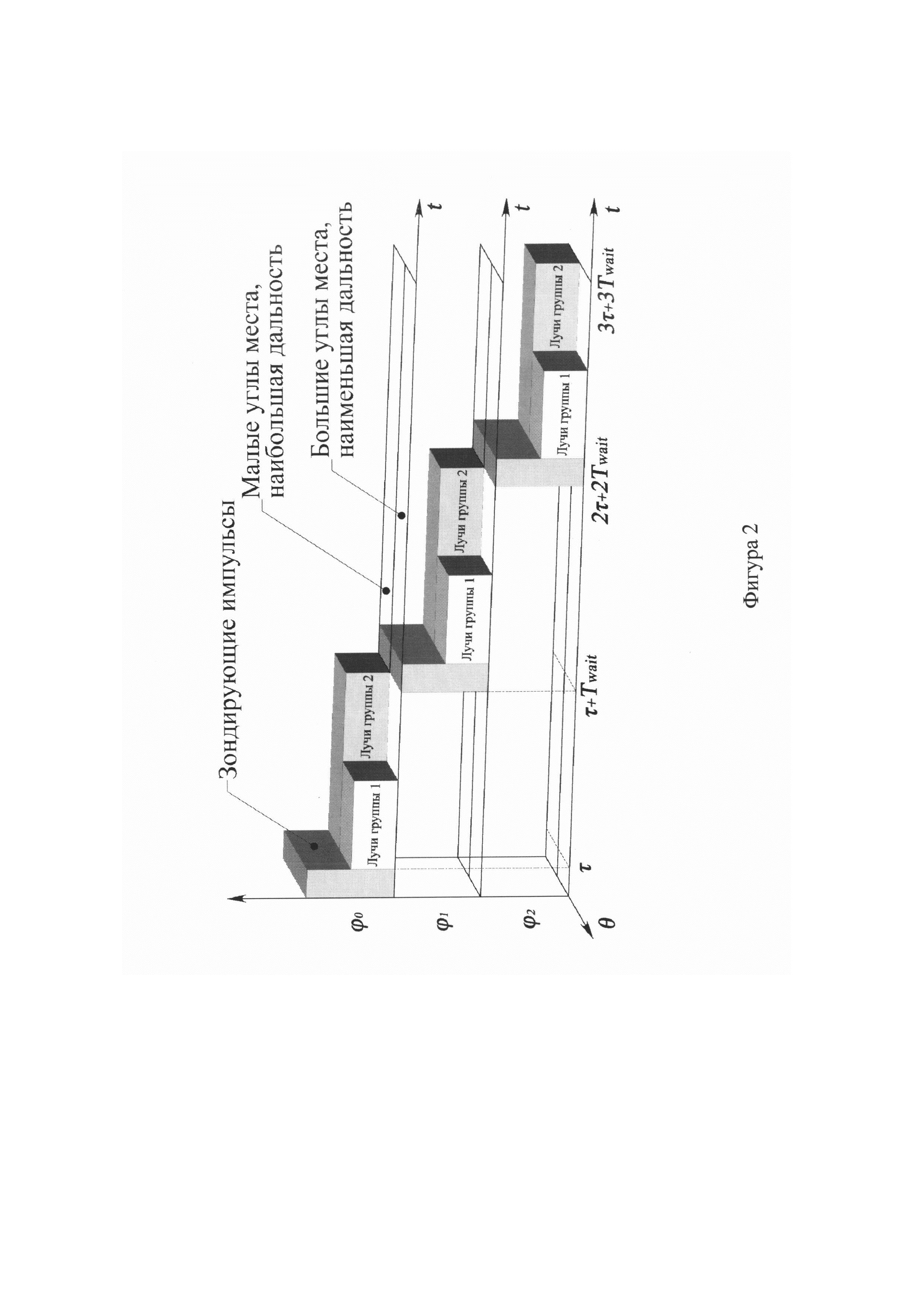
На фиг. 2 приведена пространственно-временная диаграмма распределения приемных лучей для трех азимутальных направлений ϕ0, ϕ1 и ϕ2 в существующей РЛС.
В начальный момент времени РЛС, реализующая существующий способ обзора, начинает излучать зондирующий импульс в требуемом направлении по азимуту ϕ0 (верхняя часть диаграммы) в момент времени t, равный нулю. После окончания излучения зондирующего импульса длительностью τ начинается прием отраженных сигналов в угломестном секторе при помощи всех приемных лучей, которые условно разделены на две группы (группы лучей 1 и 2 соответственно). Группа лучей 1 соответствует большим углам места, где дальность действия РЛС обычно ограничена максимальной высотой полета целей, а группа лучей 2 - малым углам места, ориентированным вдоль горизонта. Группа лучей 1 в момент времени t=τ+Twait1 становится свободной и РЛС больше не принимает радиолокационные сигналы лучами группы 1. Однако в соответствии с существующим способом РЛС продолжает прием сигналов в азимутальном направлении ϕ0 до момента времени τ+Twait. После этого передающий и приемный лучи переносят в новое направление по азимуту и повторяют цикл излучения и приема.
В соответствии с предлагаемым способом (фиг. 3) информацию о целях, размещенных в этих же трех азимутальных направлениях, получают иначе. Сначала осуществляют излучение первого зондирующего сигнала в течение периода τ. Прием сигналов осуществляют до момента времени t=τ+Twait1 до тех пор, пока в приемных лучах группы 1 не закончится прием радиолокационной информации. Далее передающий луч перемещают в новое направление ϕ1 и повторяют излучение зондирующего сигнала. Начало излучения второго зондирующего импульса соответствует моменту времени t=τ+Twait1, а окончание t=2τ+Twait1. В этот промежуток времени все приемные каналы отключены. Поступающая на вход радиолокационная информация в этот интервал времени теряется, однако период излучения зондирующих сигналов существенно меньше, чем время приема отраженных сигналов. В момент времени t=2τ+Twait1 все приемные каналы снова включают и продолжают прием радиолокационных сигналов, приходящих с направлений, соответствующих азимутальному сектору ϕ0 и малым углам места при помощи группы лучей 2. Кроме того, начинают прием радиолокационной информации в новом угловом азимутальном секторе ϕ1 при помощи лучей группы 1. В результате к моменту времени t=τ+Twait, за который существующая РЛС осуществляет просмотр одного азимутального сектора, при реализации предлагаемого способа будет дополнительно просмотрена часть угловых направлений во втором азимутальном секторе. При этом в первом секторе будет пропущена некоторая часть радиолокационной информации. В связи с этим в последующие периоды излучения зондирующих сигналов передающий и приемные лучи могут быть возвращены в ту пространственную область, в которой имелись пропущенные области дальности. Из анализа фиг. 3 следует, что в интервале времени [0,3τ+3Twait], в течение которого РЛС обычно просматривает три азимутальных направления, реализация предлагаемого способа позволяет не только просмотреть эти же угловые области, но некоторые из этих областей просмотреть два раза. Это позволяет увеличить число отметок целей в просматриваемой области, получаемые в один и тот же интервал времени, а, следовательно, сократить время определения траекторий целей.
Таким образом реализация заявляемого способа позволяет сократить время обзора пространства и повысить скорость завязывания траекторий обнаруженных объектов ориентировочно на 20%.
Выполнение РЛС с АФАР, с помощью которой можно реализовать заявляемый способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой, не вызовет затруднений ввиду того, что ее основные блоки и устройства широко используются, а особенности заключаются в программной доработке и реализации этой программной доработки в устройствах на основе специализированных ЭВМ.
Вышеизложенное позволяет сделать вывод о том, что предлагаемый способ соответствует критерию «промышленная применимость» для изобретения.
Реферат
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях, в которых в качестве антенны используется активная фазированная антенная решетка (АФАР) с цифровым диаграммообразованием. Достигаемый технический результат - уменьшение периода определения траекторий обнаруженных целей в зоне обзора. Указанный результат достигается за счет того, что в заданной азимутальной позиции первоначально формируют независимо друг от друга передающую и приемную диаграммы направленности (ДН), причем передающую ДН формируют в виде веерного луча, расширенного в угломестной плоскости, с помощью АФАР, а приемную ДН с помощью АФАР с цифровым диаграммообразованием - в виде многолучевой ДН в угломестной плоскости из N лучей игольчатой формы. Излучение зондирующих сигналов в виде пачки импульсов производят при запертых на время излучения зондирующих сигналов приемных каналах приемо-передающих модулей (ППМ) АФАР. Затем осуществляют прием сигналов до момента приема отраженных от целей импульсов излученной пачки в Nприемных лучах. Вновь осуществляют излучение зондирующих сигналов в виде пачки импульсов при помощи передающей диаграммы направленности, установленной в новую азимутальную позицию, с запертыми на время излучения зондирующих сигналов приемными каналами ППМ АФАР. Перемещают Nприемных лучей ДН АФАР в новую азимутальную позицию и осуществляют одновременный прием сигналов в Nлучах, расположенных в новой азимутальной позиции, и N-Nлучах, расположенных в заданной азимутальной позиции, до момента приема отраженных от целей импульсов излученной пачки во всех приемных лучах, установленных в заданной азимутальной позиции. Затем описанная последовательность действий повторяется для необходимого количества азимутальных позиций. 3 ил., 2 табл.
Формула
Документы, цитированные в отчёте о поиске
Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки
Комментарии