Устройство цифровой обработки сигналов в импульсно-доплеровской рлс с компенсацией миграции целей по дальности за один период излучения и приема пачки радиоимпульсов - RU2782249C1
Код документа: RU2782249C1
Чертежи
Описание
Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокоскоростными целями. Достигаемым техническим результатом является уменьшение количества излучаемых и принимаемых пачек радиоимпульсов в ИД РЛС для компенсации миграции высокоскоростных целей по дальности.
Известна ИД РЛС, приемный тракт которой выполнен по традиционной схеме супергетеродинных приемников, выходные сигналы которого в цифровом виде поступают в процессор РЛС, осуществляющий обнаружение целей и измерение их координат [1, стр. 235-248]. В каждом канале дальности с помощью цифрового фильтра выполняется частотная селекция области, свободной от мешающих отражений, и доплеровская фильтрация принимаемых сигналов с помощью эффективного алгоритма быстрого преобразования Фурье (БПФ). После операции БПФ осуществляется формирование модуля выходного сигнала фильтров доплеровской селекции, который поступает на пороговую схему для сравнения с порогом обнаружения. Далее производится оценка доплеровского смещения частоты и дальности до цели.
Известно устройство, реализующее метод цифровой обработки сигналов (ЦОС) в ИД РЛС, структурная схема которого представлена в [2]. В указанном методе с помощью цифрового формирования квадратурных составляющих осуществляют вычисление комплексной огибающей сигналов, поступающих с выхода усилителя промежуточной частоты, проводят ее согласованную фильтрацию, формируют дальностно-временной портрет (ДВП) и дальностно-частотный портрет (ДЧП) целей, выполняют вычисление модуля сигналов ДЧП и его пороговую обработку.
Недостатком этих устройств является снижение потенциально достижимого отношения сигнал-шум (ОСШ) и ухудшение разрешения по дальности целей, движущихся с высокими радиальными скоростями.
Из известных аналогов заявляемого изобретения наиболее близким по техническому решению к предлагаемому является устройство ЦОС в ИД РЛС с компенсацией миграции целей по дальности, описанное в патенте №2673679 РФ [3], которое выбрано в качестве прототипа и лишено недостатков аналогов.
Отличием прототипа от других аналогов является компенсация миграции высокоскоростных целей по дальности, позволяющая повысить ОСШ и разрешение по дальности целей, движущихся с высокой радиальной скоростью, за два периода излучения и приема пачек радиоимпульсов.
В указанном устройстве (в режиме обнаружения и определения параметров цели РЛС) в цифровом формирователе квадратурных составляющих (ЦФКС) осуществляют вычисление комплексной огибающей сигналов, поступающих с выхода усилителя промежуточной частоты, выполняют ее оптимальную фильтрацию в согласованном фильтре (СФ), формируют ДВП, выполняют БПФ и формируют матрицу спектров эхосигналов каждой пачки излучения и приема радиоимпульсов.
На второй (информационный) вход устройства (в режиме сопровождения или разрешения близкорасположенных целей в группе РЛС) поступает целеуказание о скорости движущейся цели, полученное в предшествующих режимах работы, и в вычислителе рассчитываются фазовые множители (ФМ), на которые затем умножаются спектры сигналов каждого периода зондирования. В результате расчетов формируется матрица ФМ, которая в поэлементном умножителе матриц умножается на полученную матрицу спектров эхосигналов каждого периода зондирования. Далее в процессоре обратного БПФ выполняется процедура обратного БПФ скорректированных спектров эхосигналов, формируются ДВП и ДЧП целей, и вычисляются модули комплексных сигналов ДЧП, которые поступают на выход устройства.
Недостаток прототипа заключается в том, что для компенсации миграции целей по дальности необходимо два периода излучения и приема пачки радиоимпульсов. Первый период излучения и приема пачки радиоимпульсов используется для получения информации о скорости цели, второй - непосредственно для компенсации миграции целей по дальности.
Предлагаемое изобретение направлено на преодоление указанного недостатка прототипа.
Техническим результатом заявляемого изобретения является уменьшение количества периодов (до одного) излучаемых и принимаемых пачек радиоимпульсов в ИД РЛС для компенсации миграции высокоскоростных целей по дальности.
Указанный технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные ЦФКС, вход которого является входом устройства, и СФ, последовательно подключенные процессор БПФ, формирователь матрицы спектров, поэлементный умножитель матриц и процессор обратного БПФ, последовательно соединенные вычислитель ФМ и формирователь матрицы ФМ, выход которого подключен ко второму входу поэлементного умножителя матриц, а также формирователь ДВП, последовательно соединенные формирователь ДЧП и вычислитель модуля, введен блок пороговой обработки, вход которого подключен к выходу вычислителя модуля, а выход является выходом устройства и соединен во входом вычислителя ФМ, причем выход СФ соединен со входом формирователя ДВП, первый выход которого подключен к первому входу формирователя ДЧП, а второй выход соединен со входом процессора БПФ; выход процессора обратного БПФ подключен ко второму входу формирователя ДЧП, а управляющий выход блока пороговой обработки соединен с управляющим входом формирователя ДВП.
Благодаря введению в известное устройство совокупности существенных отличительных признаков, предлагаемое устройство обеспечивает технический результат изобретения - уменьшение количества периодов излучения и приема пачек радиоимпульсов в ИД РЛС для компенсации миграции высокоскоростных целей по дальности.
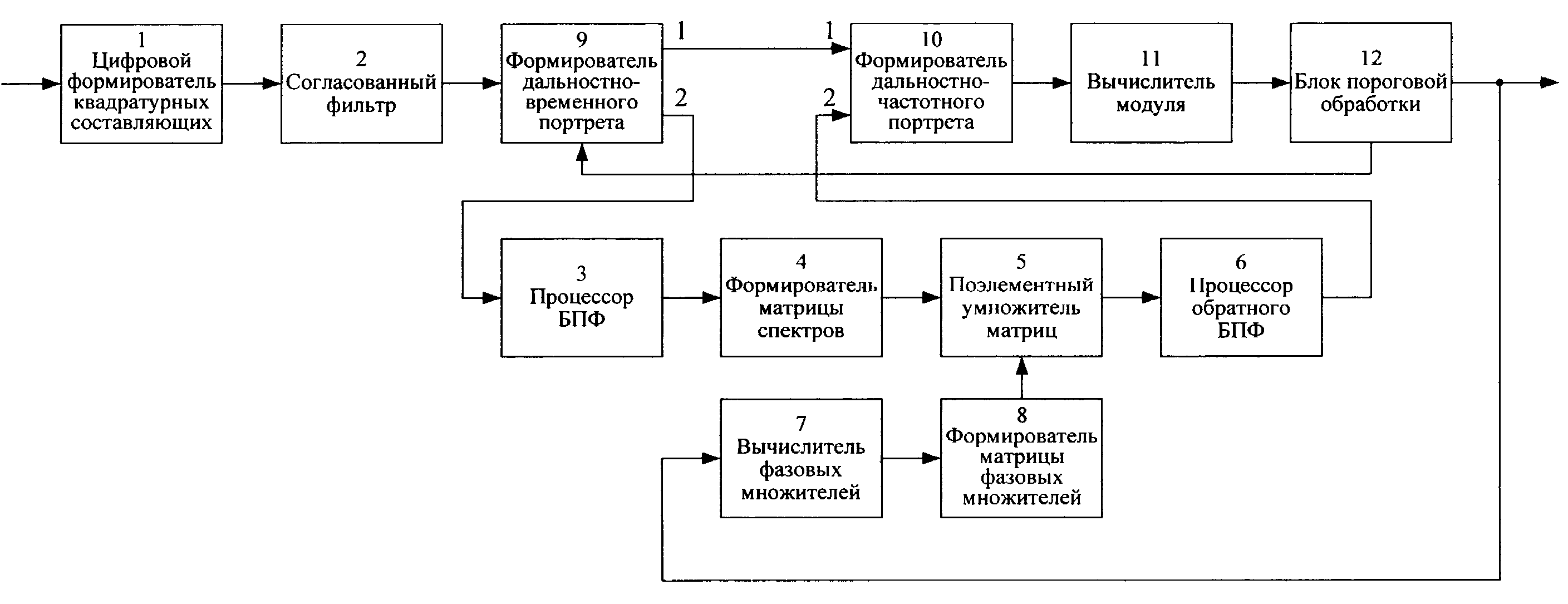
Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на чертеже, где обозначено:
1 - цифровой формирователь квадратурных составляющих;
2 - согласованный фильтр;
3 - процессор БПФ;
4 - формирователь матрицы спектров;
5 - поэлементный умножитель матриц;
6 - процессор обратного БПФ;
7 - вычислитель ФМ;
8 - формирователь матрицы ФМ;
9 - формирователь ДВП;
10 - формирователь ДЧП;
11 - вычислитель модуля;
12 - блок пороговой обработки.
Входом устройства является вход ЦФКС 1, выход которого соединен со входом СФ 2, выход которого подключен ко входу формирователя ДВП 9, первый выход которого соединен с первым входом формирователя ДЧП 10, а второй выход связан со входом процессора БПФ 3, выход которого подключен ко входу формирователя матрицы спектров 4, выход которого соединен с первым входом поэлементного умножителя матриц 5, выход которого подключен ко входу процессора обратного БПФ 6, выход которого связан со вторым входом формирователя ДЧП 10, выход которого подключен ко входу вычислителя модуля 11, выход которого соединен со входом блока пороговой обработки 12, выход которого является выходом устройства и соединен со входом вычислителя ФМ 7, выход которого подключен ко входу формирователя матрицы ФМ 8, выход которого связан со вторым входом поэлементного умножителя матриц 5, а управляющий выход блока пороговой обработки 12 соединен с управляющим входом формирователя ДВП 9.
Устройство ЦОС в ИД РЛС с компенсацией миграции целей по дальности за один период излучения и приема пачки радиоимпульсов работает следующим образом.
На вход устройства с выхода приемника РЛС поступает аналоговый сигнал промежуточной частоты. Сигнал подается на вход ЦФКС 1, в котором цифровым способом формируются отсчеты квадратурных составляющих (сигнал преобразуется в цифровую форму, умножается на экспоненту, фильтруется в цифровых фильтрах нижних частот с последующей децимацией выходных отсчетов) [4].
Отсчеты квадратурных составляющих сигнала поступают на вход СФ 2, в котором выполняется согласованная фильтрация эхосигналов во временной области с помощью нерекурсивного цифрового фильтра или в частотной области с использованием метода «быстрой» свертки [4].
Далее отсчеты эхосигнала каждого периода зондирования поступают в формирователь ДВП 9, в котором реализации сигнала, соответствующие каждому зондированию, записываются по столбцам в оперативное запоминающее устройство формирователя ДВП 9.
Отсчеты эхосигналов двумерной матрицы с первого выхода формирователя ДВП 9 поступают на первый вход формирователя ДЧП 10, в котором отсчеты сигналов каждой строки матрицы подвергаются спектральному анализу в процессоре БПФ, входящем в состав формирователя ДЧП 10.
Полученные спектры сигналов, соответствующие каждому элементу дальности, подаются на вход вычислителя модуля 11, где осуществляется определение модулей комплексных отсчетов сигналов ДЧП, которые затем поступают в блок пороговой обработки 12. В указанном блоке выполняется сравнение модулей с порогом, по результатам которого принимается решение об обнаружении цели и оценивается (приближенно из-за миграции по дальности высокоскоростной цели) ее дальность и скорость.
После определения скорости цели с выхода блока пороговой обработки 12 на вход вычислителя ФМ 7 поступает информация о скорости цели. В вычислителе 7 рассчитываются фазовые множители для коррекции миграции по дальности откликов СФ в каждом периоде зондирования, а в формирователе матрицы ФМ 8 формируется матрица фазовых множителей для всех периодов зондирования пачки радиоимпульсов.
Одновременно с управляющего выхода блока пороговой обработки 12 в формирователь ДВП 9 подается управляющий сигнал для повторного считывания имеющейся матрицы ДВП.
Со второго выхода формирователя ДВП 9 отсчеты эхосигналов двумерной матрицы поступают в процессор БПФ 3, в котором вычисляются отсчеты дискретного преобразования Фурье. Спектральные составляющие эхосигнала записывается в соответствующий данному периоду зондирования столбец формирователя матрицы спектров 4. За период накопления пачки эхосигналов в формирователе 4 формируется матрица спектров эхосигналов.
В поэлементном умножителе матриц 5 выполняется перемножение поступивших на входы двух матриц, результатом которого является двумерная матрица, каждый элемент которой представляет собой произведение соответствующих элементов матриц, полученных в формирователе матрицы спектров 4 и в формирователе матрицы ФМ 8.
Полученная двумерная матрица подается в процессор обратного БПФ 6, где выполняется процедура обратного БПФ по столбцам. В результате получаем матрицу, столбцы которой представляют собой откорректированные во времени реализации сигнала (после компенсации миграции целей по дальности), соответствующие каждому зондированию.
С выхода процессора обратного БПФ 6 двумерная матрица поступает на второй вход формирователя ДЧП 10, в котором отсчеты сигналов каждой строки, соответствующие одной дальности, подвергаются спектральному анализу в процессоре БПФ, входящем в состав формирователя ДЧП 10.
Далее в вычислителе модуля 11 осуществляется определение модулей комплексных отсчетов сигналов ДЧП, которые затем сравниваются с порогом в блоке пороговой обработки 12. Информация об обнаружении цели, ее уточненной дальности и скорости поступает на выход устройства.
В результате предлагаемой обработки в ИД РЛС за один период излучения и приема пачки радиоимпульсов повышается ОСШ на выходе и улучшается разрешающая способность по дальности высокоскоростных целей.
Основные алгоритмы обработки сигналов, компенсирующие миграцию целей по дальности, заключаются в следующем.
Для эхосигнала s(i) в каждом периоде повторения в ДВП осуществляется вычисление спектра

где m=0, …, N-1;
N - количество отсчетов эхосигнала в периоде повторения;
s(i) - значения сигнала в дискретных временных точках с номерами i=0, …, N-1.
Для компенсации временного сдвига сигнала в частотной области вычисленный спектр эхосигнала

где n=0, …, N-1 - номер периода зондирования;
N1 - количество зондирований в пачке;
Fд - частота дискретизации КО сигналов;
Vr - радиальная скорость цели;
Тп - период повторения импульсов;
с - скорость света в вакууме.
Формирование сигнала с внесенными временными задержками осуществляется посредством выполнения процедуры обратного БПФ над полученным спектром

где i=0,...,N- 1.
Работоспособность предлагаемого изобретения проверена моделированием, результаты которого подтверждают эффективность использования заявляемого устройства цифровой обработки радиолокационных сигналов в ИД РЛС с компенсацией миграции целей по дальности за один период излучения и приема пачки радиоимпульсов.
Источники информации
1. Многофункциональные радиолокационные системы: учеб. пособие для вузов / П.И. Дудник, А.Р. Ильчук, Б.Г. Татарский; под ред. Б.Г. Татарского. - М.: Дрофа, 2007. - 283 с: ил.
2. И.И. Маркович, Е.Е. Завтур. Методы цифровой обработки сигналов, отраженных от высокоманевренных воздушных целей. // Вестник воздушно-космической обороны. / Научно-технический журнал ПАО «НПО «Алмаз». - Вып.№3(11), 2016. - с 17-23.
3. Патент 2673679 РФ, МПК2006, G01S 13/53. Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с компенсацией миграции целей по дальности / И.И. Маркович, Е.Е. Завтур. Заявитель и патентообладатель - ПАО «Авиационная холдинговая компания «Сухой», АО «Научно-исследовательский институт приборостроения имени В.В. Тихомирова», ФГАОУ ВО «Южный федеральный университет». - 2017136678.3аяв.: 17.10.2017. Опубл.: 29.11.2018. Бюл. №34.
4. Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография / И.И. Маркович. - Ростов н/Д: Изд-во ЮФУ: 2012. -236 с.
Реферат
Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских радиолокационных станциях (РЛС), работающих с высокоскоростными целями. Техническим результатом является уменьшение количества излучаемых и принимаемых пачек радиоимпульсов в импульсно-доплеровских РЛС для компенсации миграции высокоскоростных целей по дальности. Заявленное устройство содержит цифровой формирователь квадратурных составляющих, согласованный фильтр, процессор быстрого преобразования Фурье, формирователь матрицы спектров, поэлементный умножитель матриц, процессор обратного быстрого преобразования Фурье, вычислитель фазовых множителей, формирователь матрицы фазовых множителей, формирователь дальностно-временного портрета, формирователь дальностно-частотного портрета, вычислитель модуля и блок пороговой обработки. 1 ил.
Комментарии