Система и способ для автоматического планирования видов в объемных изображениях мозга - RU2523929C1
Код документа: RU2523929C1
Чертежи













Описание
Изобретение относится к области медицинской техники, а более конкретно - к автоматическому планированию видов в объемных изображениях мозга.
Медицинские изображения, полученные, например, в магнитно-резонансной томографии, широко используются в современных диагностических исследованиях, в частности в исследованиях человеческого мозга. Для полноценной визуализации, а также правильной постановки диагноза большое значение имеет качественное планирование видов, также известное как планирование сканов.
Планирование видов должно учитывать анатомические особенности, т.е. спланированные виды должны быть ориентированы в соответствии с анатомическими стандартами: традиционными опорными линиями, осями и плоскостями симметрии. В частности, при исследованиях головного мозга используются стандартные позиции, в которых в качестве продольной плоскости симметрии используется плоскость, разделяющая два полушария (проходящая через продольную щель большого мозга, называемая также продольной фиссурой), для сагиттального вида, и различные стандартные аксиальные (трансверсальные) виды, построенные на оговоренных анатомических точках (примером такого построения является ориентация в Талайраховом пространстве).
Процедура планирования видов, если ее выполнять вручную, занимает много времени. Более того, при ручном планировании на эту рутинную операцию затрачивается время и труд медицинского персонала высшей квалификации. Для повышения эффективности сканирования мозга можно применить автоматическую процедуру планирования видов, в основе которой лежит анализ объемных (3D) скаут-изображений. Здесь и далее под скаут-изображением понимается предварительный трехмерный снимок, сделанный с целью локализации области интереса.
Потребность в планировании видов для медицинских изображений вполне очевидна, использование стандартных анатомических точек, опорных линий и плоскостей симметрии тоже очевидно.
Таким образом, имеет место проблема создания способа автоматического планирования видов, причем способ должен быть достаточно быстрым и надежным (робастным) при использовании скаут-изображений низкой разрешающей способности («низкокачественных»), поскольку именно такие изображения часто принимают на предварительном этапе в целях убыстрения процесса. Решению этой проблемы посвящено много работ. Как правило, в большинстве подходов в качестве природной плоскости симметрии используется среднесагиттальная плоскость (ССП), а для создания продольной опорной оси - некоторые анатомические точки в этой плоскости. С этой точки зрения большинство методов сходны между собой, а различия заключаются в способах отыскания этих опорных линий и плоскостей.
Иногда в качестве основного объекта изобретения выбираются специфические части общей задачи планирования видов: например, патент США 7,450,983 [1] описывает определение в среднесагиттальной плоскости таких анатомических структур мозга, как передняя и задняя комиссуры; патент США 7,986,823 [2] описывает определение среднесагиттальной плоскости (ССП) в качестве отдельной задачи; патенты США 8,002,019 [3], 8,190,232 [4], 8,270,698 [5] описывают и построение среднесагиттальной плоскости, и отыскание анатомических точек в ней.
Патенты [1] и [3] используют быстрый и экономичный способ отыскания опорных линий для построения среднесагиттальной плоскости: обрабатываются только два сечения (среза) изображения - один корональный и один аксиальный, и две опорных линии, найденные в этих сечениях, используются для построения ССП. Такой подход не обладает большой робастностью, поскольку не обрабатывает избыточного набора сечений. В случае скаут-изображений низкой разрешающей способности это может привести к ненадежному построению ССП из-за статистической недостоверности используемых данных.
В патенте [5] обрабатывается избыточный набор аксиальных сечений для построения ССП, что, безусловно, повышает робастность способа. Однако этот способ использует только аксиальные сечения и не учитывает корональных. Следовательно, полезная дополнительная информация не используется. Выбор рабочих сечений в этом патенте проводится без учета анатомических особенностей головного мозга - набор рабочих сечений получается простой равномерной «рубкой» всего объема от нижней части до верхней. Не предусмотрено никакой предварительной стадии процесса для осмысленного выбора рабочих сечений. Робастность такого подхода можно повысить, если предусмотреть в нем обработку корональных сечений наряду с аксиальными, а также специальную процедуру, реализующую предварительный выбор рабочих сечений с учетом анатомических особенностей мозга. В патенте [2], который использует только два рабочих сечения, предварительный выбор сечений отсутствует: первое из сечений (аксиальный срез) выбирается просто как средний слой всего объемного скаут-изображения.
В патентах [1] и [5] при обработке сечений для выявления в них «серединной линии» строится аппроксимирующий эллипс, и используются его свойства симметрии. В патенте [5] эллипсная маска в сечении строится по предварительно выделенному контуру изображения мозга. Боле надежным был бы подход, в котором вместо контурного эллипса использовалась бы маска, покрывающая реальную форму среза мозга в сечении - главные оси такой плоской фигуры могут отличаться от осей контурного эллипса. Кроме того, при низкой разрешающей способности скаут-изображения построение плоской фигуры, накрывающей срез, более статистически достоверно, чем выделение контура этого среза и построение эллипса по нему.
В патентах [3] и [4] выявление серединной линии в сечениях усовершенствовано: линии симметрии аппроксимирующих эллипсов используются только в качестве начального приближения, а затем применяется этап уточнения, в ходе которого обнаруживается положение темной линии, разделяющей мозговые полусферы в данном сечении. Для обнаружения темных пикселей используются градиентные маски. Однако на практике обнаружение может быть затруднено из-за того, что искомая разделяющая линия может иметь весьма сложный характер: это зависит как от положения выбранного сечения относительно анатомии всего мозга, так и от качества скаут-изображения. Например, обнаруживаемая линия может иметь разрывы, может быть неоднородной по интенсивности составляющих ее пикселей, может иметь распределенный характер - то есть иметь более сложный характер, чем тот, на который ориентировано обнаружение локальной градиентной маской.
Более эффективным представляется использование специального численного критерия, который выявлял бы след продольной щели мозга (фиссуры) в заданной зоне сечения. В частном случае такая линия, разделяющая мозговые полушария, может быть темной; однако возможны и другие варианты интенсивности пикселей, составляющих такую линию - это зависит от используемого способа (протокола) получения изображения.
В патентах [1], [3], [4], как следствие того факта, что используются лишь две опорные линии для построения ССП, не применяется никакой постобработки для фильтрации недостоверных (несостоятельных) данных. В патенте [5] используются избыточные данные, и в итоге ССП строится регрессионным методом (на полученных опорных линиях создаются вспомогательные опорные точки, а затем искомая плоскость строится на этом множестве точек). Такой подход повышает робастность метода, но, тем не менее, и в этом патенте не применяется никакой пост-обработки для фильтрации статистически недостоверных опорных линий.
Представляется, что надежность результата была бы выше, если бы статистически недостоверные опорные линии отфильтровывались: например, можно было бы удалять линии, вектор направленности которых существенно отличается от обобщенного направления всей совокупности опорных линий.
Задача, на решение которой направлено заявляемое изобретение, заключается в разработке усовершенствованного способа обработки изображений как высокой, так и низкой разрешающей способности. При этом заявляемый способ нацелен, главным образом, на надежность (робастность) получаемых результатов.
Технический результат достигается за счет того, что разработан способ автоматического планирования видов в объемных изображениях мозга, состоящий из следующих этапов:
- получение трехмерного скаут-изображения;
- построение среднесагиттальной плоскости мозга на основе наборов опорных линий, вычисленных в выбранных сечениях вышеназванного трехмерного скаут-изображения;
- создание продольной опорной линии на основе анатомических точек, обнаруженных в вышеназванной среднесагиттальной плоскости;
- планирование сканов с ориентацией, основанной на вышеназванных среднесагиттальной плоскости и продольной опорной линии, отличающийся тем, что:
• вышеназванные опорные линии для построения среднесагиттальной плоскости:
- вычисляют на основе аксиальных и корональных сечений трехмерного изображения, предписываемых автоматически в виде двух соответствующих наборов сечений, выбранных путем анализа объемного изображения;
- вычисляют на основе обнаружения следов продольной фиссуры мозга в вышеуказанных сечениях, осуществляемого с использованием численного критерия, вычисляемого путем анализа пикселей изображения;
- собирают вышеназванные опорные линии, вычисленные на основе обнаружения следов продольной фиссуры мозга в вышеуказанных сечениях, в аксиальный и корональный избыточные наборы линий, соответственно;
- фильтруют такие наборы линий путем исключения из указанных наборов тех линий, которые несовместимы по направлению с обобщенным вектором направления всех линий соответствующего набора;
• формируют продольную опорную линию на основе изображения, реконструированного в среднесагиттальной плоскости, и анатомических точек, обнаруженных в этом изображении.
Способность заявляемого способа обрабатывать изображения низкой разрешающей способности является его важным достоинством, поскольку распознавание анатомических структур в таком «некачественном» изображении является сложной задачей. В то же время такое свойство способа является необходимым, поскольку на практике разрешающая способность скаут-изображения часто намеренно делается низкой, чтобы уменьшить время, затрачиваемое на получение изображения. Таким образом, описываемый подход к планированию видов мозга базируется на алгоритмах, которые позволяют повысить робастность результата даже в случае применения скаут-изображений низкой разрешающей способности (именно такие изображения часто принимают на предварительном этапе в целях убыстрения процесса). Заявляемый способ планирования видов позволяет сократить время, затрачиваемое на эту рутинную операцию, и в итоге повышает эффективность всего процесса медицинского обследования.
Перечисляя характерные особенности заявляемого способа, следует указать на следующие моменты:
• Заявляемый подход использует избыточный набор (множество) рабочих сечений как в аксиальной, так и в корональной плоскостях; как следствие, определяется избыточный набор опорных линий для построения ССП, что в итоге повышает точность построения ССП.
• Множество рабочих сечений (используемое для построения опорных линий) выбирается с помощью задаваемого алгоритма, учитывающего анатомические свойства мозга в исследуемом изображении. Кроме того, для различных подмножеств рабочих сечений в дальнейшем используются различные алгоритмы обработки, с учетом анатомических особенностей изображений в этих сечениях.
• Используется пост-фильтрация найденных в сечениях опорных линий: удаляются линии, вектор направленности которых существенно отличается от обобщенного направления всего множества (аксиального или коронального) опорных линий.
• Благодаря избыточности найденных опорных линий (аксиальных и корональных) итоговое построение ССП отличается повышенной робастностью и статистической достоверностью.
• Для обнаружения следов продольной щели головного мозга (фиссуры) в сечениях применен инновационный алгоритм, использующий задаваемый численный критерий, позволяющий выявить протяженные линии (сплошные или разрывные), что в итоге обеспечивает более достоверное построение опорных линий для ССП.
Изобретение включает в себя способ и систему для автоматического планирования видов (сканов) в объемном изображении мозга в соответствии с его анатомическими свойствами. Реализации этого изобретения вычисляют план для построения диагностических видов на основе обработки объемного скаут-изображения.
В частности, реализация изобретения включает в себя способ и систему для автоматического планирования видов (сканов) томографа на основе анализа предварительного чернового объемного изображения, что в итоге позволяет определить каноническую ориентацию сканов для получения диагностического изображения. В зависимости от приложения полученный план видов может быть использован прямо или косвенно при получении высококачественных диагностических двумерных изображений, ориентированных в соответствии с анатомическими стандартами.
Ориентация видов диагностического изображения определяется путем вычисления опорных линий и плоскостей на основе свойств анатомии и природной симметрии. В частности, общепринятой опорной плоскостью является среднесагиттальная плоскость (ССП), построенная на основе продольной щели мозга (фиссуры, которая разделяет две полусферы мозга). В этой плоскости для построения продольной опорной оси используются надлежащие анатомические точки, две или более (например, это могут быть анатомические точки, определяющие стандартную ориентацию мозга по Талайраху). Идея стандартной ориентации мозга поясняется на Фиг.2.
Выбор соответствующих анатомических точек или природных плоскостей симметрии не является предметом данного изобретения, так как такой анатомический подход очевиден и фактически является стандартом. Предметом изобретения служит способ робастного определения этих свойств в объемном изображении.
В соответствии с рассматриваемым примером реализации способ включает в себя следующие основные стадии (Фиг.1):
• в качестве входных данных с медицинского оборудования принимают объемное скаут-изображение. В частном случае (весьма распространенном) разрешающая способность этого изображения может быть низкой с целью экономии времени его получения (101 на Фиг.1);
• производят выбор рабочих сечений (срезов), из которых формируют две группы - аксиальные и корональные сечения соответственно. Выбор рабочих сечений ведется с учетом геометрических и анатомических свойств исследуемого мозга (102);
• отобранные аксиальные и корональные сечения (представляющие собой двумерные, серые изображения) обрабатывают. В результате обработки в них обнаруживают следы продольной щели (фиссуры) мозга (след есть отображение этой фиссуры в рассматриваемом рабочем сечении); обнаружение ведется способом, детали которого описываются далее в тексте. Указанный способ использует численный критерий, основанный на анализе интенсивностей пикселей (103);
• строят (формируют) опорные линии в сечениях; в качестве этих линий выбирают центральные оси обнаруженных следов продольной фиссуры мозга в сечениях. Опорные линии собираются в два набора (множества) - для аксиальных и корональных сечений соответственно. Эти наборы линий избыточны: общее количество линий в них превышает минимальное количество (две), необходимое для расчета среднесагиттальной плоскости (ССП) (104);
• так как вышеуказанные множества (наборы) опорных линий избыточны, проводят фильтрацию этих множеств с целью исключения линий, у которых вектор направления существенно отличается от обобщенного вектора направления всего соответствующего множества линий (105);
• на основе вышеуказанных наборов опорных линий строят среднесагиттальную плоскость (ССП). Этот этап может быть реализован несколькими способами, описываемыми далее в тексте: например, ССП может быть построена как регрессионная плоскость на наборе точек, воспроизведенных на каждой из опорных линий; другой подход использует обобщение направлений опорных линий и построение двух векторов, на основе которых далее строится ССП (106);
• на основе построенной ССП реконструируют двумерное изображение в сечении объемного скаут-изображения указанной плоскостью; для такой реконструкции могут быть использованы пиксели из объемного скаут-изображения, лежащие наиболее близко к сечению ССП (107);
• реконструированное в ССП изображение используют для отыскания в нем соответствующих анатомических точек для проведения продольной опорной оси (108). Любые приемлемые анатомические точки и любой способ их отыскания могут быть использованы на этом этапе;
• на основе вышеназванных анатомических точек вычисляют продольную опорную линию (109);
• найденные параметры ССП и продольной опорной линии передают в устройство планирования видов; указанные параметры представляют собой полный набор информации, необходимый для планирования видов (110).
Далее существо заявляемого изобретения поясняется с привлечением графических материалов.
Фиг.1. Блок-схема реализации заявляемого способа.
Фиг.2. Ориентация мозга в объемном скаут-изображении.
Фиг.3. След от пересечения продольной щели (фиссуры) большого мозга аксиальным сечением на различных уровнях высоты.
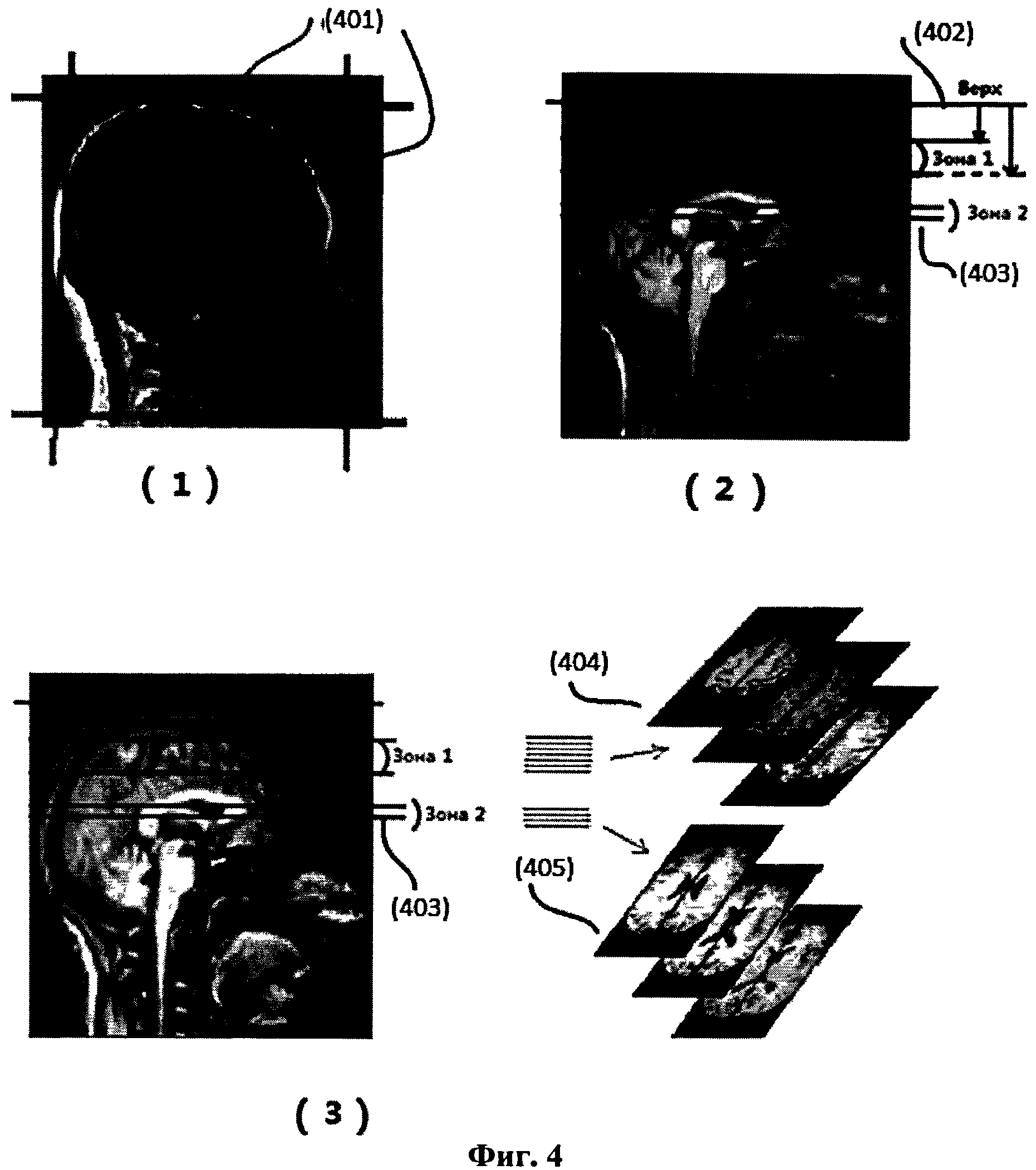
Фиг.4. Выбор рабочих аксиальных сечений.
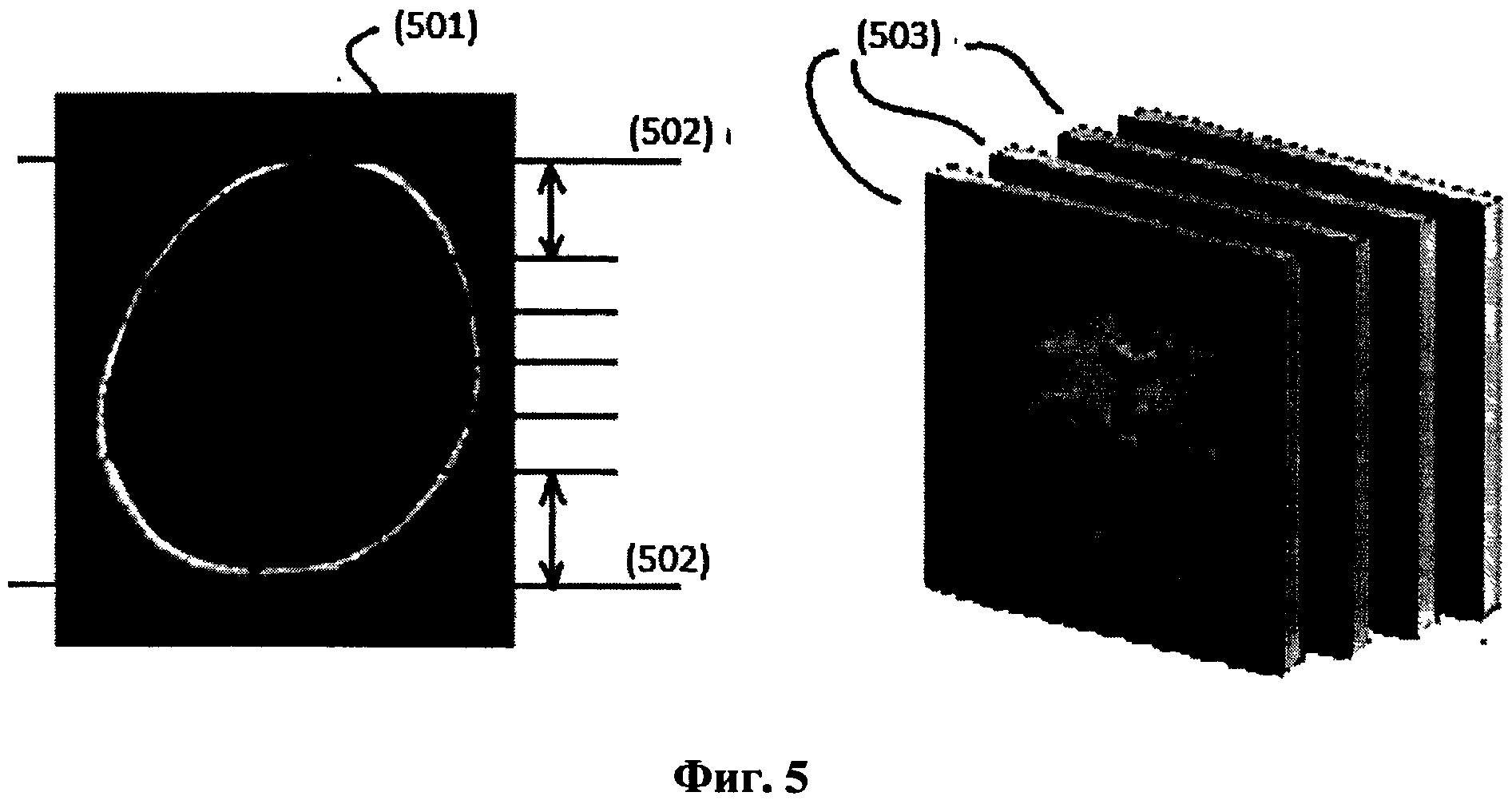
Фиг.5. Выбор рабочих корональных сечений.
Фиг.6. Блок-схема процесса обнаружения следа продольной щели большого мозга в некотором сечении.
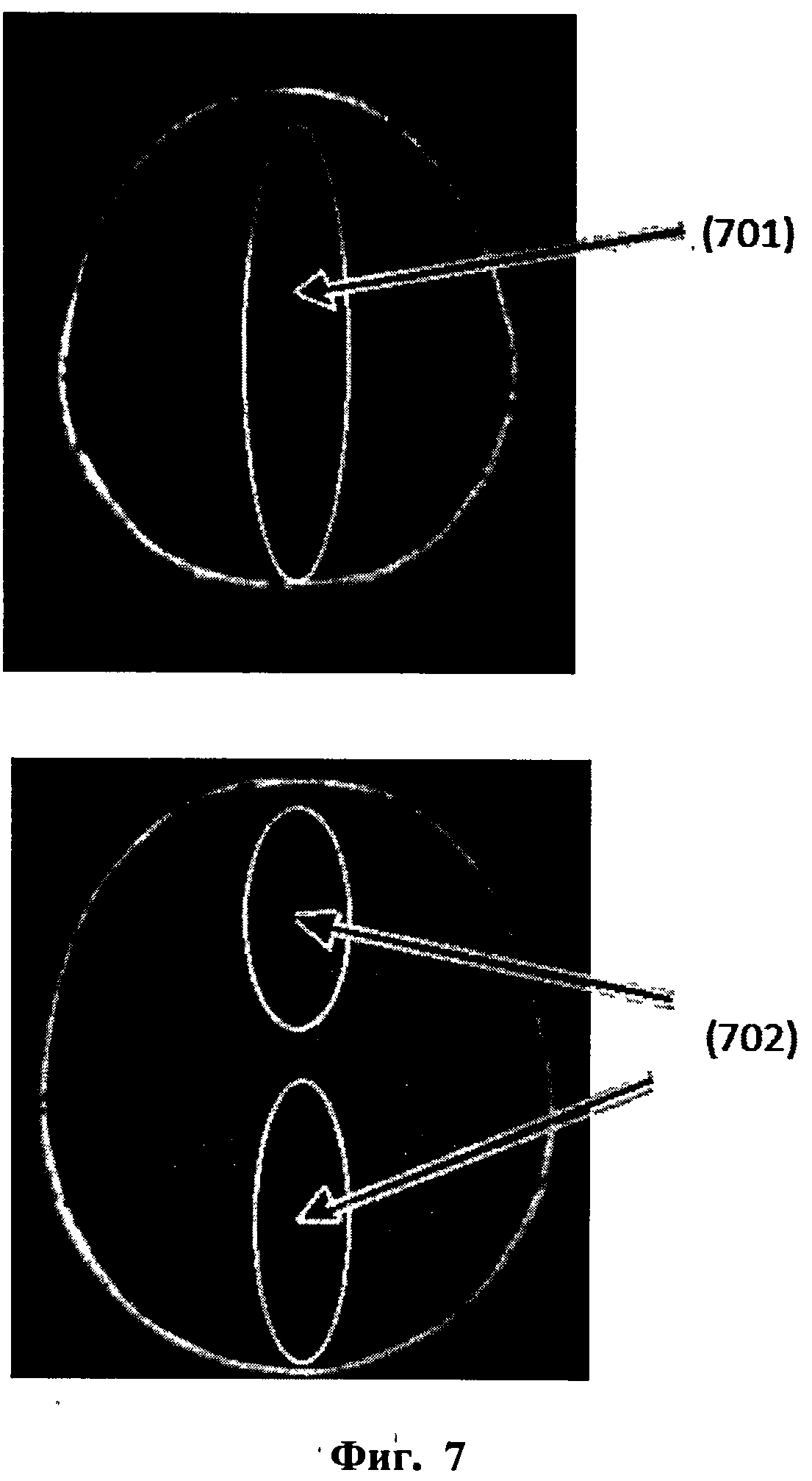
Фиг.7. След продольной щели большого мозга (фиссуры) в некоторых сечениях; в данном примере пиксели фиссуры темнее окружающих, принадлежащих белому веществу головного мозга.
Фиг.8. Детектор продольной щели большого мозга, представленный в виде полосы, в пределах которой проводится анализ пикселов и вычисляется оговоренный количественный критерий (например, значение относительного затемнения участка).
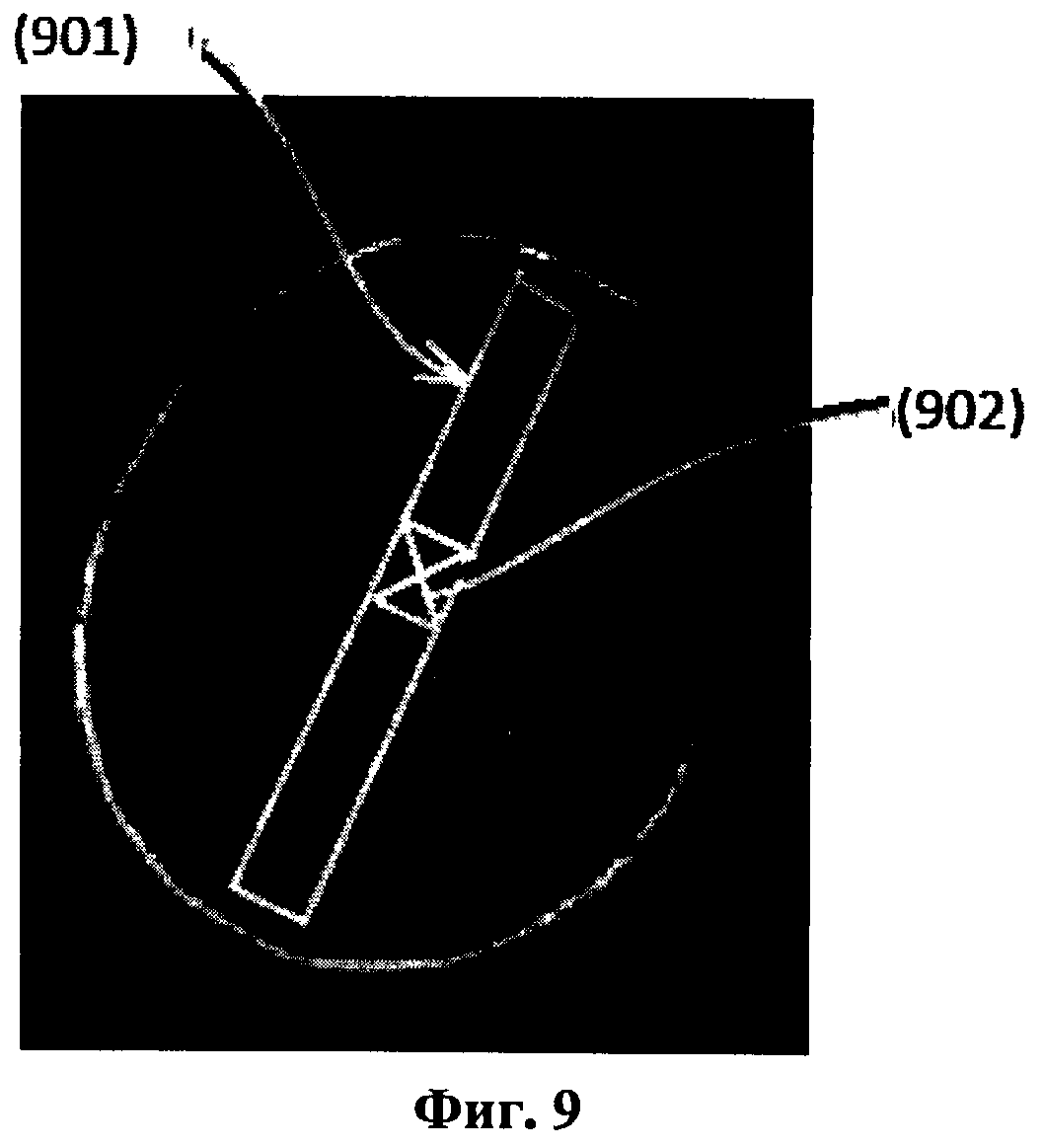
Фиг.9. Разрывная форма детектора продольной фиссуры большого мозга; эта форма зависит от анатомических свойств мозга, проявляющихся в исследуемом сечении.
Фиг.10. Создание бинарной маски в некотором сечении, расчет главных осей этой маски.
Фиг.11. Оценка диапазонов изменения параметров детектора при исследовании предписанной рабочей зоны.
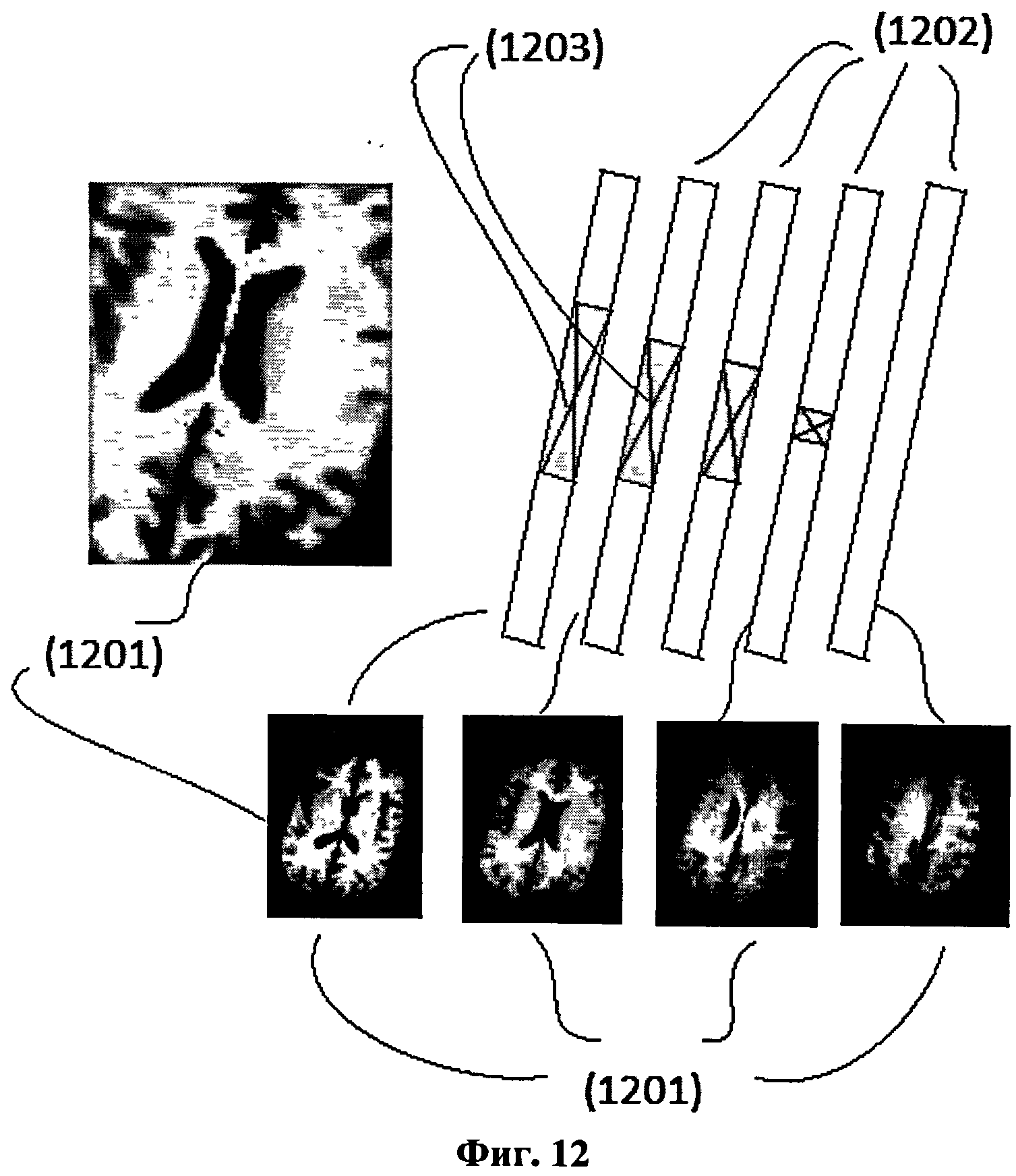
Фиг.12. Детектор продольной фиссуры мозга с прерывистой формой: его центральная часть подлежит исключению, размеры исключаемой части зависят от свойств исследуемого сечения.
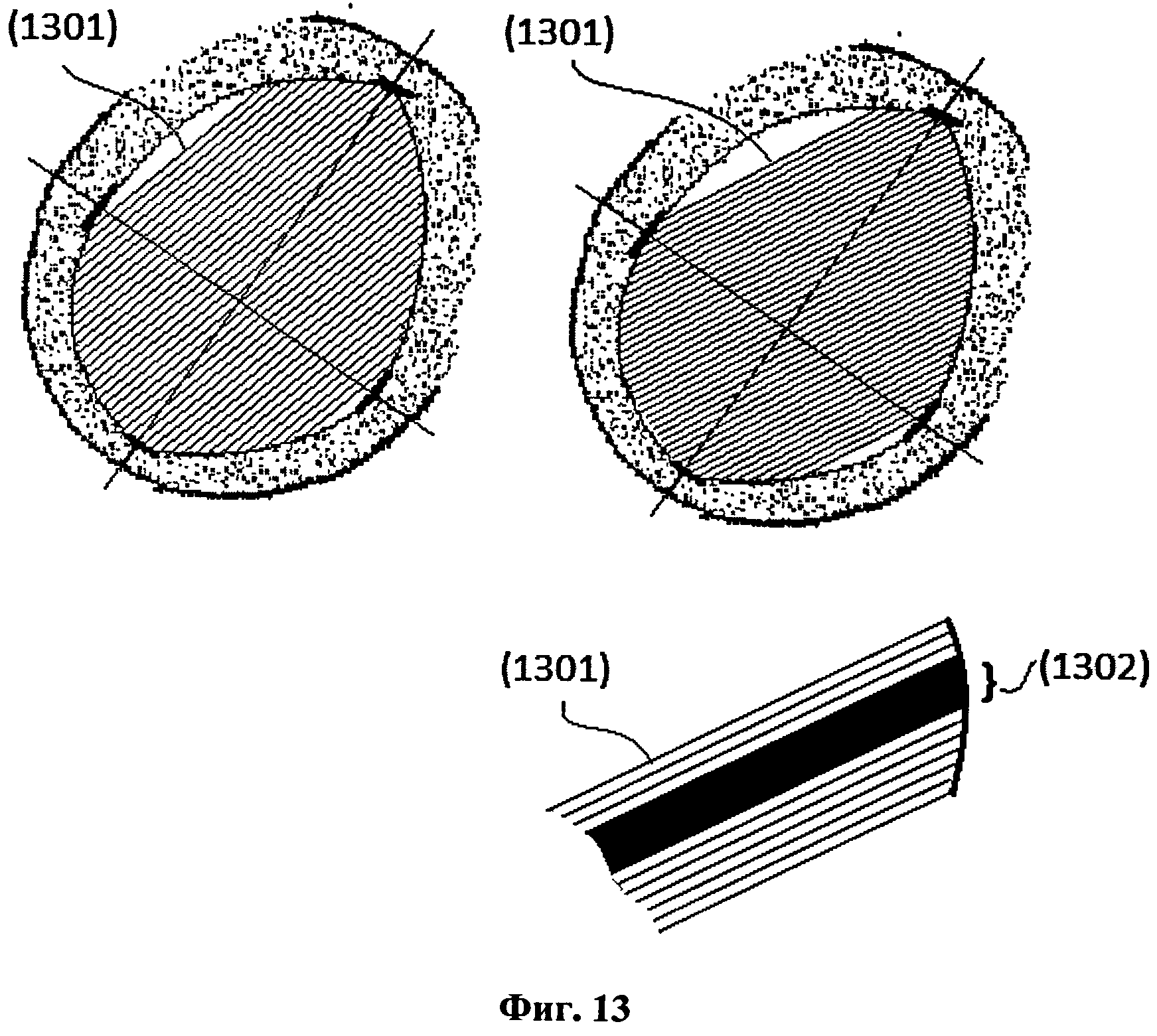
Фиг.13. Параллельный детектор продольной фиссуры мозга, представляющий собой пучок параллельно направленных секущих.
Фиг.14. Построение рабочей зоны для детектора продольной фиссуры мозга в корональном сечении.
Фиг.15. Обнаружение продольной фиссуры мозга в рабочей зоне коронального сечения. Центральная ось детектора в дальнейшем используется для построения опорной линии в сечении.
Фиг.16. Обнаруженные позиции продольной фиссуры мозга в предписанных сечениях (7 аксиальных, 8 корональных), принимаемые в качестве опорных линий для дальнейшего вычисления ССП.
Фиг.17. Два набора опорных линий (векторов), построенных для аксиальных и корональных сечений.
Фиг.18. Недостоверные (ошибочно обнаруженные) линии продольной фиссуры мозга в наборе аксиальных сечений: видно, что 3 вектора из 12 имеют неверные направления.
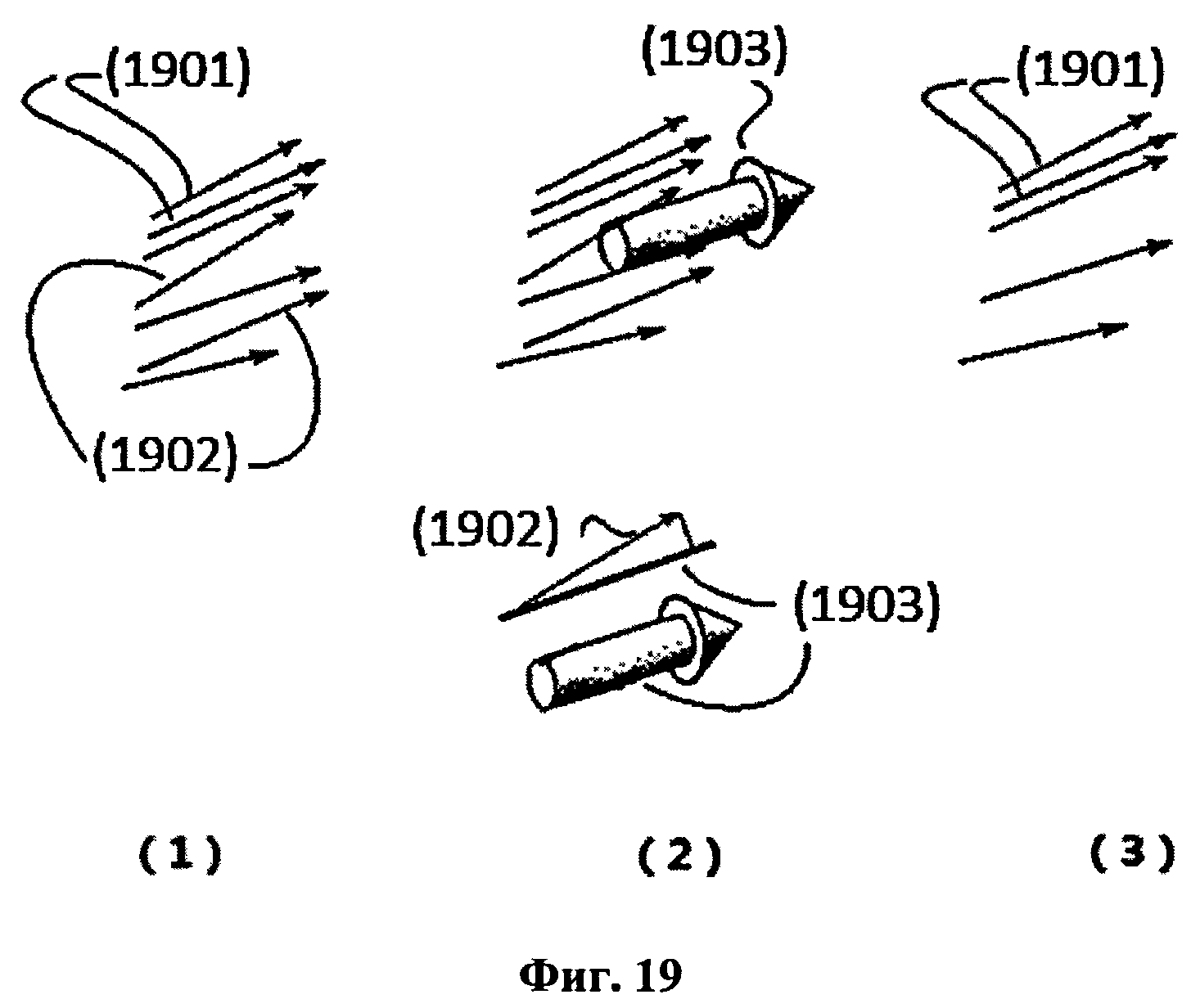
Фиг.19. Использование обобщенного вектора направлений в процедуре постобработки с целью выявления статистически несостоятельных направлений.
Фиг.20. Вычисление ССП как регрессионной плоскости, построенной на избыточном наборе точек, сгенерированных на каждой опорной линии.
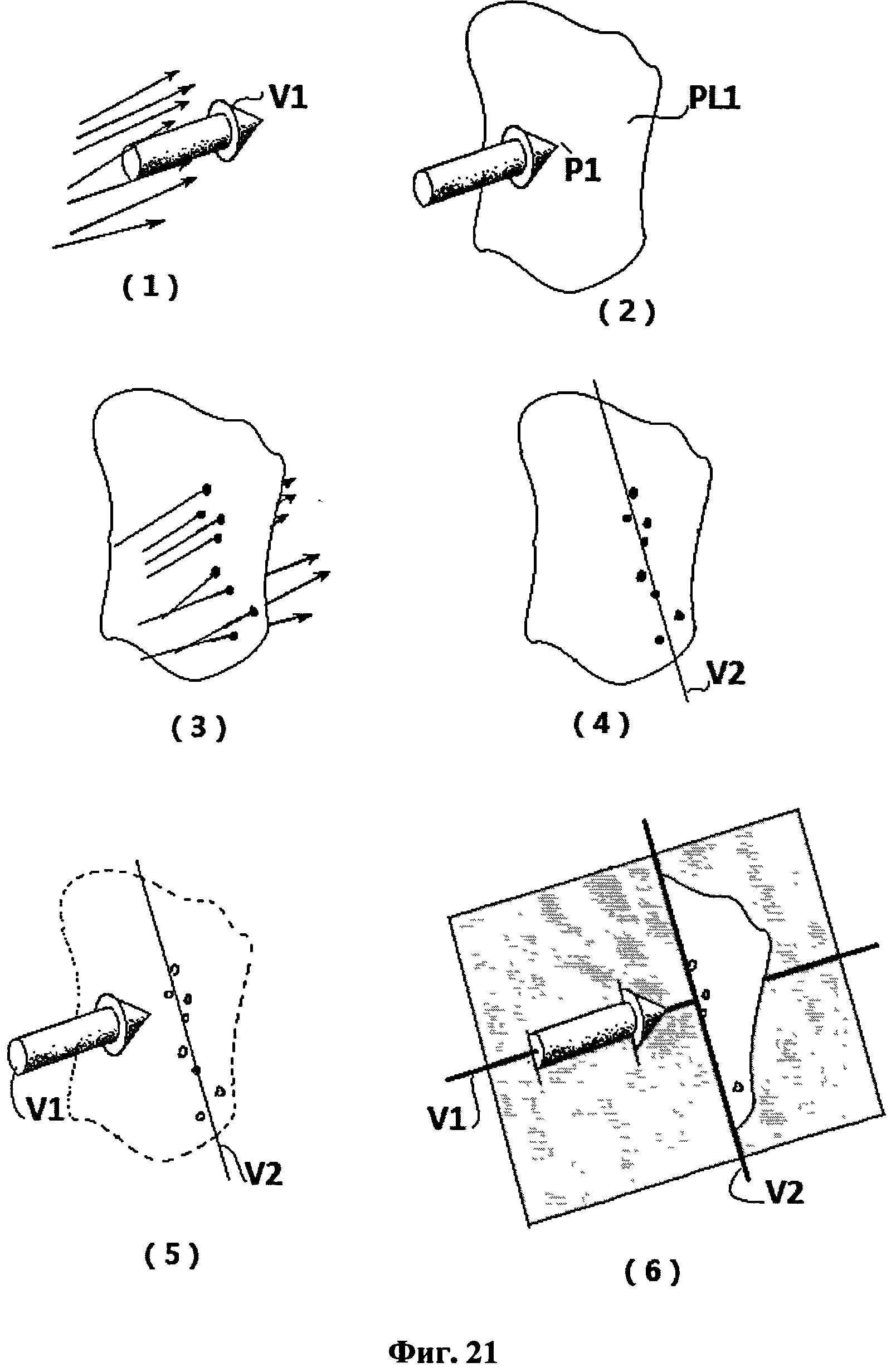
Фиг.21. Вычисление ССП на основе двух обобщенных направляющих векторов, вычисленных на основе аксиальных опорных линий.
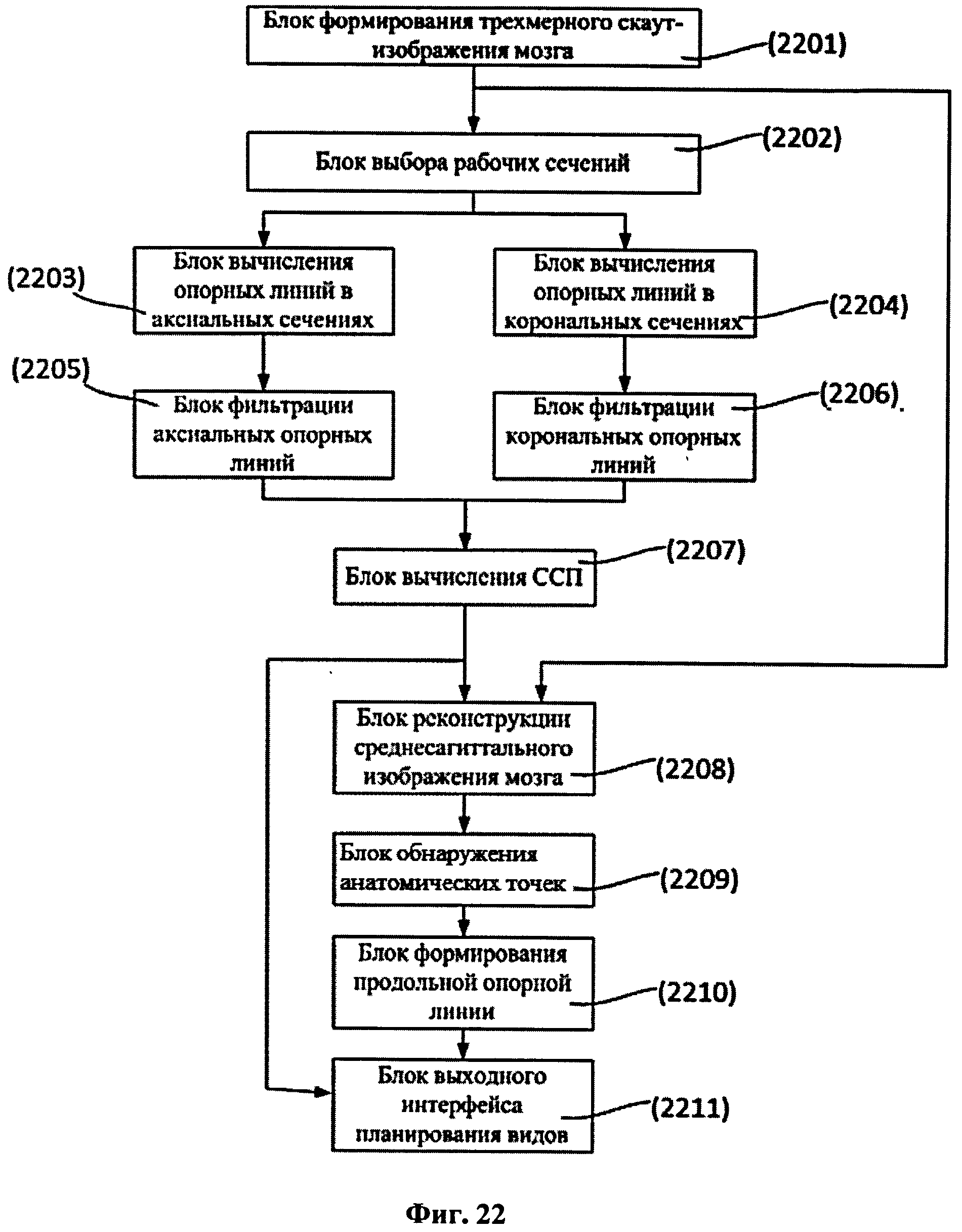
Фиг.22. Система автоматического планирования видов в объемном изображении мозга.
Фиг.23. Система обнаружения продольной фиссуры большого мозга и построения опорной линии в некотором сечении.
Описываемый здесь пример реализации изобретения относится к области медицинских изображений, в частности к магнитно-резонансной томографии мозга. Объемное изображение формируется из пространственных пикселей, называемых вокселами. Каждый воксел определяет интенсивность серого цвета в соответствующей точке пространства. Первым этапом процесса планирования видов является получение предварительного изображения, так называемого скаут-изображения (101 на блок-схеме Фиг.1).
Обработка изображения низкой разрешающей способности является важным достоинством способа, поскольку распознавание анатомических структур в таком «некачественном» изображении является сложной задачей. В то же время такое свойство способа является необходимым, поскольку на практике разрешающая способность скаут-изображения преднамеренно понижается, чтобы уменьшить время, затрачиваемое на получение изображения. В связи с вышесказанным описываемый способ нацелен, главным образом, на надежность (робастность) получаемых результатов.
Фиг.2 иллюстрирует постановку задачи планирования видов: на нем показана произвольная ориентация объемного скаут-изображения. Куб 201 на иллюстрации означает объемное изображение, аксиальное сечение 202 показывает, что ориентация мозга весьма произвольна; плоскость 203 симметрии мозга ориентирована в объеме изображения таким образом, что ее след в сечении не совпадает с направлением соответствующей координатной оси скаут-изображения. Фигура 204 показывает предполагаемое среднесагиттальное сечение мозга, полученное в соответствии с плоскостью 203 симметрии. Для получения диагностических видов в их канонической ориентации следует вычислить соответствующие опорные линии и плоскости путем обработки скаут-изображения.
Геометрия скаут-изображения исследуется путем обработки сечений (двумерных изображений). В соответствии с элементом 102 на блок-схеме Фиг.1 в предлагаемом способе предусмотрена стадия автоматического выбора рабочих сечений (с целью их последующей обработки). Рабочие сечения выбираются как в аксиальной, так и в корональной плоскостях. Такой предварительный выбор необходим, поскольку след от рассечения фиссуры, разделяющей мозговые полусферы, выглядит различно для различных сечений и зависит от расположения сечений. Этот факт иллюстрируется на Фиг.3, где 301 обозначает уровни аксиальных сечений, 302 - изображения, получающиеся в этих сечениях. Боле того, не все сечения пригодны для получения нужных результатов. В связи с этим и предлагается подход с предварительным анализом изображения мозга и отбором подходящих рабочих сечений.
Выбор аксиальных рабочих сечений иллюстрируется на Фиг.4, основные этапы этого процесса таковы:
• в объеме вокруг изображения головы описывается прямоугольный параллелепипед (bounding box). Фиг.4 (1) показывает, как выглядит названный параллелепипед 401 в сагиттальном сечении, взятом в середине скаут-изображения;
• определяется координата верхнего уровня 402 изображения головы, затем уровни 403 сечений определяются с помощью предписанных расстояний, отсчитываемых от верхнего уровня, и на их основе определяются рабочие зоны для выбора сечений. Расстояния для уровней 403 определены заранее на основе статистического анализа обучающей выборки изображений. Вышеназванные уровни сечений и рабочие зоны иллюстрируются на Фиг.4 (2), (3);
• в каждой из вышеназванных рабочих зон выбирается множество аксиальных сечений (с некоторым фиксированным шагом по вертикальной координате), они обозначены как 404, 405 соответственно. Эти множества сечений иллюстрируются Фиг.4 (3).
Затем выбирается множество корональных рабочих сечений, как это показано на Фиг.5. Для этой цели используется одно из ранее выбранных аксиальных сечений 501 (например, среднее). В нем определяется рабочая зона 502, и набор корональных сечений получается в ней с фиксированным шагом по продольной оси.
Расположение вышеназванных рабочих зон, расстояния и геометрические пропорции для выбора сечений зависят от анатомии мозга и свойств скаут-изображения (размеров, позиции и относительного размера исследуемой головы в скаут-объеме и т.д.). Эти параметры определяются предварительным статистическим анализом обучающей группы скаут-изображений.
Таким образом, выполняется этап получения двух наборов рабочих сечений (аксиального и коронального), как это описано выше.
На следующей стадии описываемого способа 103 в отобранных рабочих сечениях обнаруживаются линии - следы рассечения продольной фиссуры большого мозга. Для этого процесса разработан усовершенствованный способ обнаружения, выполняющий анализ изображения в сечении, как это описано ниже.
Фиг.6 иллюстрирует блок-схему способа обнаружения следа продольной щели большого мозга в выбранном сечении. Основные стадии процесса таковы:
• формирование детектора как полосы, покрывающей множество пикселей, используемых для вычисления заданного числового критерия в определенном положении этого детектора, 601;
• создание сплошной бинарной маски - плоской фигуры, покрывающей область мозга в рабочем сечении изображения, 602;
• вычисление главных осей вышеназванной бинарной маски как осей инерции плоской фигуры, 603;
• выбор рабочей зоны для обнаружения продольной фиссуры мозга в исследуемом сечении (на основе геометрии бинарной маски), задание параметров для изменения положения детектора в рабочей зоне - диапазонов изменения координат его центра и угла поворота, 604;
• отыскание оптимальной позиции детектора в предписанной рабочей зоне с помощью оптимизации численного критерия, 605;
• вычисление искомой опорной линии в данном сечении как центральной оси детектора в найденном его оптимальном положении, 606.
Ниже приведено детальное описание перечисленных этапов.
Основная идея обнаружения линии разделения мозговых полушарий (фиссуры) в исследуемом сечении заключается в отыскании наиболее протяженной линии (непрерывной либо прерывистой) с заданными яркостными свойствами. В описываемой реализации такая линия является темной на фоне окружающего ее белого вещества мозга. Для иных протоколов (режимов) получения изображения возможны иные проявления этой линии (например, в некоторых протоколах она может выглядеть светлой, либо формироваться пикселями определенного яркостного диапазона); в таких ситуациях рассматриваемый способ обнаружения должен быть изменен в соответствии с яркостными свойствами обнаруживаемой линии. Пример обнаружения следа продольной фиссуры мозга в некотором сечении показан на Фиг.7 (в этом примере линия выглядит темной). В первом сечении искомая линия образует непрерывную структуру 701, во втором сечении показана прерывистая линия 702.
Основой описываемого способа является количественный детектор следа продольной фиссуры головного мозга в некотором сечении. Детектор определен как полоса, покрывающая множество пикселей, с возможностью анализа их интенсивностей и подсчета численного критерия, оценивающего предполагаемое присутствие искомой линии в исследуемой зоне. В частности, в описываемой реализации таким критерием служит нормированная оценка затемнения участка, поскольку искомая линия является темной. Под нормализацией понимается деление соответствующих яркостных статистик в зоне, покрываемой детектором, на общее количество пикселей в этой зоне. Идея обнаружения иллюстрируется на Фиг.8. Для сечения мозга 801 детектор формируется как полоса 802, искомая линия (фиссура) в этом примере показана как извилистая темная структура 803. Для вычисления критерия затемнения участка используются интенсивности пикселей 804.
При исследовании плоского сечения изображения детектор имеет способность к поступательному перемещению и повороту. Его длина адаптируется в соответствии с границами рабочей зоны. Детектор может быть разрывным (то есть иметь зазоры), если это требуется в соответствии с ограничениями, накладываемыми анатомией. Например, если обнаруживаемая линия определенных в сечениях предполагается разрывной, соответствующая часть полосы детектора исключается из вычислений. На Фиг.9 показан периметр 901 полосы детектора и исключаемая из вычислений зона 902 в центре этой полосы. Такое адаптивное поведение детектора может быть предписано в соответствии с изученными заранее анатомическими свойствами изображений в сечениях, эти свойства зависят от положения выбранного сечения.
Для определения рабочей области внутри сечения создается бинарная маска. Маска строится как сплошная плоская фигура, которая покрывает изображение мозга в сечении. В описываемой реализации для построения маски отыскивается наибольший (по площади) непрерывный светлый объект на темном фоне. Для отыскания маски используются операции заливки и выделения сплошных объектов в изображении. На Фиг.10 меткой 1001 обозначено сечение мозга в сером изображении, 1002 показывает сплошную бинарную маску. Такой подход, основанный на наилучшем покрытии объекта плоской фигурой, более надежен, чем построение эллипса по выделенному периметру объекта. Главные оси 1003 маски 1002 строятся как оси инерции плоской фигуры; далее эти оси используются для определения рабочей зоны в сечении путем исключения внешних полей 1004, относительный размер которых предписан на основе предварительного статистического анализа обучающей выборки изображений. На Фиг.10 исключенные поля обозначены как 1006, а рабочая зона как 1005.
Внутри рабочей зоны применяется описанный выше детектор. Ширина детектора выбирается в соответствии с анатомическими свойствами изображения: она должна быть несколько больше, чем предполагаемая ширина обнаруживаемой линии; этот параметр выбирается на основе предварительной статистической обработки изображений, полученных при фиксированном протоколе (режиме сканирующей аппаратуры). Длина детектора адаптивно меняется в зависимости от его положения в рабочей зоне (1005 на Фиг.10). Поскольку детектор должен быть проверен во всех допустимых позициях внутри рабочей зоны, для него задаются диапазоны изменения параметров положения - поступательного перемещения и поворота, а также шаги изменения этих параметров. Фиг.11 иллюстрирует возможные положения детектора для задаваемых поступательных смещений и углов поворота. Детектор 1102 показан в произвольной позиции внутри рабочей зоны 1101. Диапазон поступательного перемещения детектора обозначен на рисунке как 1103, положение детектора в некоторой поступательно смещенной позиции показано как 1104. Диапазон вариаций углового положения детектора показан как 1105.
Для каждой проверяемой позиции детектора вычисляется значение численного критерия (путем анализа интенсивности пикселей внутри формы, покрываемой детектором). В описываемой реализации критерий вычисляется как нормированная оценка затемнения участка, более детальное описание критерия дано далее в тексте. Таким образом, выполняется оптимизационный процесс для отыскания наилучшей позиции детектора, то есть позиции, для которой критерий затемнения (используемый в данном примере) принимает максимальное значение. Найденная оптимальная позиция детектора (его серединной оси) и принимается за искомую линию, разделяющую мозговые полушария в данном сечении. В простейшем случае оптимизация может быть реализована как экстенсивный перебор всех возможных положений детектора с проверкой критерия.
В описываемой реализации для детектора используются разновидности численного критерия, перечисленные ниже:
• критерий, вычисляемый как относительная доля пикселей (среди покрываемых детектором) с интенсивностью ниже заданного порогового значения;
• критерий, вычисляемый как нормализованная взвешенная сумма интенсивностей пикселей;
• критерий, вычисляемый как нормализованная взвешенная сумма интенсивностей пикселей при условии, что выбираются пиксели с интенсивностью, удовлетворяющей заданному диапазону.
В описываемой реализации используются критерии с формой более сложной, чем непрерывная прямоугольная полоса. В частности, используются детекторы разрывной формы (с зазорами), показанные на Фиг.9. На Фиг.12 дана более детальная иллюстрация. Метками 1201 обозначены примеры аксиальных сечений мозга, 1202 - периметры соответствующих детекторов, 1203 - подобласть, исключаемая из вычислений. В этом иллюстративном примере из детектора исключается центральная часть, размер исключаемой части разный для разных сечений. Размер исключаемой части зависит от свойств сечения, в данном примере эта область большая для нижних сечений и маленькая для верхних. Такая закономерность построения детекторов соответствует анатомическим особенностям мозга в этих сечениях: в нижних сечениях искомая линия раздела полушарий разрывна вблизи центра, а в верхних сечениях этот разрыв постепенно исчезает. Взаимосвязь между геометрией, исключаемой из детектора подобласти и высотой сечения, определяется предварительным статистическим анализом на обучающей выборке изображений.
В итоге процесс обнаружения, описанный выше, выполняется для всех выбранных аксиальных сечений. При этом центральная ось детектора, находящегося в найденной оптимальной позиции в исследуемом сечении, принимается за линию, разделяющую мозговые полушария. Эти линии собираются для последующего их использования - для создания ССП. Если при этом процесс обнаружения в каком-либо сечении потерпит неудачу, этот факт не отразится катастрофически на построении ССП: робастность результата достигается за счет избыточного набора сечений.
Процесс обнаружения опорных линий, построенный на оптимизации критерия путем перебора всех возможных положений детектора с буквальным его построением в каждом положении (как иллюстрируется Фиг.11), является очень затратным по времени выполнения. Поэтому в данном изобретении предлагается также другая реализация алгоритма обнаружения, более быстрая, названная «параллельным обнаружением». При таком подходе детектор строится как пучок из нескольких параллельных секущих, как это показано на Фиг.13. Для каждого проверяемого угла ориентации детектора строится набор коллинеарных линий (1301 на Фиг.13). Эти линии названы секущими, поскольку они пересекают все пиксели в рабочей зоне; при этом вдоль каждой линии собирается статистика интенсивностей пересекаемых ею пикселей (которая используется при вычислении критерия обнаружения фиссуры). Расстояние между параллельными секущими выбирается меньшим, чем ширина применяемого детектора, поэтому детектор можно представить как пучок, собранный из нескольких секущих (1302 на Фиг.13). На основе статистики интенсивностей пикселей вдоль каждой секущей вычисляется критерий как комбинация соответствующих статистик нескольких секущих, собранных в пучок. Таким образом, весь процесс «параллельного» обнаружения представляется следующими этапами:
• в исследуемом сечении выбирается рабочая зона, выбираются диапазоны перемещений и поворотов детектора в этой зоне;
• выбирается ширина детектора, назначается расстояние между секущими;
• далее выполняется оптимизационный процесс для критерия, тестируемого во всем предписанном диапазоне углов. При этом для каждого тестируемого угла выполняются следующие процедуры:
- строится набор параллельных секущих в пределах рабочей зоны (секущие направлены в соответствии с тестируемым углом поворота детектора);
- для каждой секущей вычисляются необходимые статистики интенсивностей пикселей;
- реконструируется детектор как пучок секущих для всех возможных пучков в совокупности линий. Перебор всех возможных пучков соответствует поступательному перемещению детектора от линии к линии. Для каждой (реконструированной таким образом) поступательной позиции детектора вычисляется значение критерия. В итоге отыскивается оптимальное значение критерия, соответствующее некоторому оптимальному поступательному перемещению детектора при фиксированном угле;
• оптимальные значения критерия, найденные описанным выше способом для каждого тестируемого угла в предписанном диапазоне, сравниваются между собой с целью отыскания глобального оптимума;
• в итоге определяется глобальный оптимум критерия и соответствующая ему позиция детектора. Центральная ось детектора в найденной оптимальной позиции принимается за искомую опорную линию, разделяющую мозговые полусферы в обрабатываемом сечении.
Обнаружение, выполненное вышеописанным способом, быстрее прямого перебора всех положений детектора с его буквальным построением, поскольку эффективно использует вычисленные однократно яркостные статистики пикселей для каждой секущей и не требует повторного анализа пикселей для каждого нового поступательного перемещения детектора. Кроме того, при таком подходе не требуется прямого построения полосы детектора и ее пересечения с границами рабочей зоны, поскольку такие пересечения уже выполнены при построении секущих и неявно учтены при сборе статистики пикселей, пересекаемых каждой секущей.
Таким образом, процедура обнаружения линий, разделяющих мозговые полушария в аксиальных сечениях, выполняется так, как это описано выше.
Обнаружение линии (фиссуры) разделения мозговых полушарий в корональных сечениях проводится аналогично описанному выше процессу для аксиальных сечений. Отличие состоит в построении рабочей зоны для обнаружения, поскольку структура изображений в корональных и аксиальных сечениях различается.
Фиг.14 иллюстрирует пример построения рабочей зоны в корональном сечении. При этом основные этапы, соответствующие описываемой реализации, таковы:
• выбирается корональное сечение (14001 на Фиг.14.1);
• строится сплошная бинарная маска 1402, накрывающая изображения мозга в данном сечении. Она определяется как наибольшая сплошная светлая область в этом сечении (Фиг.14.2);
• главные оси полученной маски 1403 вычисляются как оси инерции сплошной плоской фигуры (Фиг.14.3);
• определяется центр 1405 рабочей зоны на вертикальной оси, его расстояние 1404 от верхней границы маски выбирается на основании предварительно выполненного статистического анализа корональных сечений в обучающей выборке изображений (Фиг.14.4);
• рабочая зона выбирается в виде круга 1406 с центром, определенным описанным выше способом; радиус этого круга зависит от размера головы в изображении, соответствующая пропорция должна быть определена предварительно на этапе статистического анализа обучающей выборки изображений. Построение рабочей зоны иллюстрируется Фиг.14.5, Фиг.14.6.
Фиг.14.6 показывает локализацию построенной рабочей зоны на сером изображении коронального сечения.
Для рабочей зоны в корональном сечении, определенной описанным выше способом, проводится процедура обнаружения линии, разделяющей полушария, аналогичная той, что описывалась ранее для аксиальных сечений. Фиг.15 иллюстрирует результаты обнаружения для коронального сечения: 1501 - рабочая зона, 1502 - центральная ось детектора в найденной оптимальной позиции.
После обработки детектором всех аксиальных и корональных сечений строятся соответствующие опорные линии. Они определяются как центральные оси детекторов в найденных оптимальных позициях (предполагается, что это соответствует центральным осям сечений фиссур, т.е. центральным осям линий разделения мозговых полушарий в рассматриваемых сечениях). Опорные линии в итоге представляются в трехмерном виде: третьей координатой является соответствующая координата исследуемого плоского сечения (т.е. это соответствующая координата исследуемого слоя в объемном скаут-изображении). На Фиг.16 показан пример - результат обнаружения линий разделения полушарий для выбранного набора аксиальных и корональных сечений (1601 - аксиальные, 1602 - корональные), эти линии являются опорными для последующего построения ССП. Фиг.17 иллюстрирует итоги обработки сечений - создание двух наборов опорных линий: для аксиальных сечений 1701 создается набор аксиальных опорных линий 1702, для корональных сечений 1703 создается набор корональных опорных линий 1704.
Если какие-либо из процессов обнаружения не выявляют фиссуры, соответствующие сечения исключаются из дальнейшего анализа. В такой ситуации количество получаемых опорных линий снижается, но процесс построения ССП не прекращается, поскольку наборы рабочих сечений и соответственно наборы опорных линий намеренно делаются избыточными. Более того, благодаря факту избыточности возможно применение процедуры фильтрации результатов, которая отсеивает неточно определенные опорные линии, как это описано далее в тексте.
Не все из вычисленных опорных линий пригодны для последующего построения ССП, некоторые из результатов могут быть недостоверны. Пример такой ситуации показан на Фиг.18, где показаны успешно найденные опорные линии 1801 и недостоверные линии 1802. В показанном примере три линии из двенадцати (в аксиальных сечениях) могут считаться недостоверными по сравнению с множеством остальных, этот факт заметен визуально по векторам направленности этих линий. Для исключения таких недостоверных результатов проводится фильтрация собранных опорных линий.
Основная идея фильтрации иллюстрируется Фиг.19. На Фиг.19.1 изображен набор линий, включающий в себя линии с достоверными 1901 и недостоверными 1902 векторами направлений. На Фиг.19.2 изображен построенный обобщенный вектор направления 1903 для всей совокупности опорных линий. Определение такого вектора базируется на использовании невязки, представляющей собой нормализованную длину ортогонального вектора-остатка, возникающего при проецировании одного вектора на другой. Такой ортогональный остаток является естественной мерой неколлинеарности сравниваемых векторов. При этом обобщенным вектором направления считается такой, для которого сумма длин ортогональных остатков, возникающих при проецировании на него всего множества направлений опорных линий, минимальна. Таким образом, построенное направление может рассматриваться как «коллинеарное всей совокупности опорных линий» в смысле минимума суммарной невязки, собранной по ортогональным остаткам от проецирования вышеназванных линий на этот вектор. В этом определении предполагается, что все векторы направлений нормализованы, т.е. приведены к единичной длине, а суммарная невязка нормализуется делением на число векторов.
Далее фильтрация совокупности опорных линий выполняется следующим образом. Вектор направления каждой из линий проецируется на обобщенный вектор направления, при этом вычисляется невязка - длина ортогонального вектора-остатка, имеющего место при проецировании. Если величина этой невязки превышает заданный допустимый порог, направление тестируемой опорной линии считается существенно отличающимся от направления обобщенного вектора, такая линия исключается из набора, Фиг.19.2. В результате такой фильтрации остается прореженный набор опорных линий (Фиг.19.3), и надежность всего решения возрастает.
Описанная выше фильтрация проводится и для аксиального, и для коронального наборов найденных опорных линий.
На основе собранных в сечениях опорных линий строится среднесагиттальная плоскость мозга (ССП). В описываемой реализации используются три подхода к построению ССП:
• построение регрессионной плоскости на множестве точек, восстановленных на отрезках опорных линий;
• построение ССП по двум обобщенным векторам направлений, построенным на основе набора аксиальных опорных линий;
• построение ССП по двум обобщенным векторам направлений, построенным на основе наборов аксиальных и корональных опорных линий.
Первый подход иллюстрируется на Фиг.20: через 2001 обозначены опорные линии, через 2002 - сгенерированные на них точки, через 2003 - ССП, построенная на основе этих точек.
Второй подход иллюстрируется рисунком Фиг.21, его основные этапы таковы:
• вычисление вектора V1 как обобщенного направления всех аксиальных опорных линий (Фиг.21.1) в соответствии с определением, приведенным выше;
• вычисление граничных точек всех аксиальных опорных линий как точек пересечения указанных линий с границами бинарных масок в соответствующих аксиальных сечениях;
• вычисление центральной точки Р1 с координатами, определенными как осредненные координаты вышеназванных граничных точек;
• построение плоскости PL1, ортогональной к вышеназванному вектору V1 и проходящей через вышеназванную центральную точку P1 (Фиг.21.2);
• пересечение всех вышеназванных опорных линий из аксиального набора с построенной плоскостью PL1; получение множества точек пересечения (Фиг.21.3);
• построение опорной линии V2 как регрессионной прямой, проходящей через множество вышеназванных точек пересечения (Фиг.21.4);
• построение ССП как плоскости, вектор нормали которой ортогонален к вышеназванным векторам V1, V2, и проходящей через ранее найденную точку P1 (Фиг.21.5 и Фиг.21.6).
Третий подход аналогичен второму; он отличается лишь тем, что на последнем этапе выполняется коррекция одного из опорных векторов: вместо упомянутого выше вектора V2 используется вектор V3, полученный как взвешенная сумма V2 и обобщенного вектора V_COR направлений корональных опорных линий. Пропорция взвешенной суммы уточняется экспериментально; в описываемой реализации для указанных векторов использовались одинаковые весовые множители.
Таким образом, на основе ранее полученных опорных линий строится ССП, как это описано выше.
На основе построенной ССП реконструируется уточненное сагиттальное изображение, соответствующее рассечению скаут-объема вышеназванной плоскостью (пиксели этого изображения берутся как ближайшие к ССП пиксели объема).
В реконструированном сагиттальном изображении обнаруживается пара (или более) анатомических точек, тип которых оговорен заранее. Способ обнаружения - любой, в описываемой реализации не оговаривается. Выбор анатомических точек в описываемой реализации также не оговаривается (например, эти точки могут быть выбраны в соответствии с Талайраховым атласом). Далее на основе найденных анатомических точек строится опорная прямая в среднесагиттальном сечении. Если указанных точек две, то прямая строится очевидным образом как проходящая через эти две точки. При необходимости может быть использовано большее количество анатомических точек, в этом случае опорная прямая проводится через них более сложными методами.
В итоге построенная ССП и продольная опорная прямая (построенная по найденным анатомическим точкам в ССП) являют собой полный набор информации, необходимый для планирования видов (сечений) головного мозга, поэтому они являются выходными параметрами описываемого способа планирования видов.
В заявляемую группу связанных единым замыслом решений входит также система для автоматического планирования видов (сканов) в трехмерном изображении головного мозга. Система реализует описанный выше способ, ее целью является вычисление ССП и соответствующих опорных линий. Система содержит модули, перечисленные ниже (см. Фиг.22):
• блок формирования трехмерного скаут-изображения мозга (2201 на Фиг.22), который собирает данные медицинского изображения, формирует из них трехмерное скаут-изображение и передает его в блок выбора рабочих сечений и в блок реконструкции среднесагиттального изображения мозга;
• блок выбора рабочих сечений (2202), который анализирует вышеназванное скаут-изображение, выбирает аксиальные и корональные рабочие сечения, формирует из них два соответствующих набора и передает эти два набора в блоки вычисления опорных линий в сечениях, раздельно для аксиальных и корональных сечений соответственно;
• блок вычисления опорных линий в аксиальных сечениях (2203), который анализирует аксиальные сечения, обнаруживает в них следы продольной фиссуры мозга, вычисляет опорные линии как центральные осевые линии вышеназванных обнаруженных следов и передает эти опорные линии в блок фильтрации аксиальных опорных линий;
• блок вычисления опорных линий в корональных сечениях (2204), который анализирует корональные сечения, обнаруживает в них следы продольной фиссуры мозга, вычисляет опорные линии как центральные осевые линии вышеназванных обнаруженных следов и передает эти опорные линии в блок фильтрации корональных опорных линий;
• блок фильтрации аксиальных опорных линий (2205), который анализирует принятый набор аксиальных опорных линий, исключает из набора те линии, вектор направления которых существенно отличается от обобщенного вектора направления всей совокупности линий, входящих в набор, и передает прореженный таким образом набор опорных линий в блок вычисления;
• блок фильтрации корональных опорных линий (2206), который анализирует принятый набор корональных опорных линий, исключает из набора те линии, вектор направления которых существенно отличается от обобщенного вектора направления всей совокупности линий, входящих в набор, и передает прореженный таким образом набор опорных линий в блок вычисления ССП;
• блок вычисления ССП (2207), который принимает вышеназванные наборы аксиальных и корональных опорных линий, формирует на их основе плоскость и передает параметры этой плоскости в блок реконструкции среднесагиттального изображения мозга и в блок выходного интерфейса планирования видов;
• блок реконструкции среднесагиттального изображения мозга (2208), который принимает параметры вышеназванной ССП и трехмерное скаут-изображение, формирует среднесагиттальное изображение мозга на основе сечения скаут-изображения вышеназванной ССП и передает это изображение в блок обнаружения анатомических точек;
• блок обнаружения анатомических точек (2209), который принимает вышеназванное среднесагиттальное изображение мозга, анализирует его, находит пару (или более) анатомических точек оговоренного типа и передает координаты этих точек в блок формирования продольной опорной линии;
• блок формирования продольной опорной линии (2210), который принимает координаты вышеназванных анатомических точек, вычисляет продольную опорную линию на основе этих точек и передает параметры вычисленной опорной линии в блок выходного интерфейса планирования видов;
• блок выходного интерфейса планирования видов (2211), который принимает вышеназванную ССП и продольную опорную линию и передает их параметры в систему управления медицинским сканером.
В заявке дополнительно раскрывается система для обнаружения следа продольной фиссуры головного мозга и создания соответствующей опорной линии в аксиальном или корональном сечениях мозга. Система реализует описанный выше способ обнаружения. Система содержит модули, перечисленные ниже (см. Фиг.23):
• блок создания бинарной маски мозга в рабочем сечении (2301 на Фиг.23), который принимает серое двумерное изображение рабочего сечения, вычисляет сплошную бинарную маску, покрывающую изображение мозга в рабочем сечении и передает изображение этой бинарной маски в блок определения главных осей бинарной маски;
• блок определения главных осей бинарной маски (2302), который принимает изображение вышеназванной бинарной маски, вычисляет главные оси этой бинарной маски и передает параметры этих осей с блок определения рабочей зоны;
• блок определения рабочей зоны (2303), который анализирует вышеназванную бинарную маску и ее главные оси, определяет рабочую зону для работы детектора следа продольной щели мозга в сечении, определяет диапазоны горизонтального перемещения и угла поворота для проверяемого положения вышеназванного детектора и передает эти параметры в блок обнаружения следа продольной щели мозга в рабочем сечении;
• блок обнаружения следа продольной фиссуры мозга в рабочем сечении (2304), который принимает параметры вышеназванной рабочей зоны и вычисленные диапазоны позиционирования вышеназванного детектора, тестирует детектор во всех возможных позициях в предписанном диапазоне, вычисляя количественный критерий путем анализа пикселей, охватываемых детектором в каждом из его тестируемых положений, сравнивает вычисленные величины критерия для всех исследованных позиций детектора и находит позицию, соответствующую оптимальному значению критерия, передает геометрические параметры этой найденной оптимальной позиции детектора в блок вычисления опорной линии;
• блок вычисления опорной линии (2305), который принимает геометрические параметры вышеназванной оптимальной позиции детектора и вычисляет опорную линию как серединную ось детектора, расположенного в оптимальной позиции в сечении.
Предложенный способ применим для планирования видов в медицинских изображениях на основе анализа предварительно полученного чернового объемного изображения - скаут-изображения, в частности, в магнитно-резонансной томографии, рентгеновской томографии и т.п.
Предложенный способ улучшает весь процесс получения изображений головного мозга, так как уменьшает общее время, требуемое для получения диагностических сканов, за счет автоматизации планирования видов. Кроме того, автоматическое планирование видов освобождает квалифицированных медиков от рутинного ручного труда, затрачиваемого на эту процедуру.
Подходы, используемые в предложенном способе, нацелены, главным образом, на повышение робастности процесса. Благодаря этому способ применим к скаут-изображениям как высокой, так и низкой разрешающей способности (низкая разрешающая способность часто используется для уменьшения времени получения скаут-изображения).
Реферат
Изобретение относится к автоматическому планированию видов в объемных изображениях мозга. Техническим результатом является обеспечение надежности за счет повышения точности обработки изображений как высокой, так низкой разрешающей способности. Способ содержит: получение трехмерного скаут-изображения, построение среднесагиттальной плоскости мозга, создание продольной опорной линии на основе анатомических точек, планирование сканов с ориентацией, основанной на среднесагиттальной плоскости и продольной опорной линии; опорные линии для построения среднесагиттальной плоскости: вычисляют на основе аксиальных и корональных сечений трехмерного изображения; вычисляют на основе обнаружения следов продольной фиссуры мозга в сечениях; собирают опорные линии, вычисленные на основе обнаружения следов продольной фиссуры мозга в сечениях; фильтруют такие наборы линий путем исключения из указанных наборов тех линий, которые несовместимы по направлению с обобщенным вектором направления всех линий соответствующего набора; формируют продольную опорную линию на основе изображения, реконструированного в среднесагиттальной плоскости, и анатомических точек, обнаруженных в этом изображении. 3 н. и 10 з.п. ф-лы, 23 ил.
Формула
получение трехмерного скаут-изображения,
построение среднесагиттальной плоскости мозга на основе наборов опорных линий, вычисленных в выбранных сечениях вышеназванного трехмерного изображения,
создание продольной опорной линии на основе анатомических точек, обнаруженных в вышеназванной среднесагиттальной плоскости,
планирование сканов с ориентацией, основанной на вышеназванных среднесагиттальной плоскости и продольной опорной линии, отличающийся тем, что:
вышеназванные опорные линии для построения среднесагиттальной плоскости:
вычисляют на основе аксиальных и корональных сечений трехмерного изображения, предписываемых автоматически в виде двух соответствующих наборов сечений, выбранных путем анализа объемного изображения;
вычисляют на основе обнаружения следов продольной фиссуры мозга в вышеуказанных сечениях, осуществляемого с использованием численного критерия, вычисляемого путем анализа пикселей изображения;
собирают вышеназванные опорные линии, вычисленные на основе обнаружения следов продольной фиссуры мозга в вышеуказанных сечениях, в аксиальный и корональный избыточные наборы линий соответственно;
фильтруют такие наборы линий путем исключения из указанных наборов тех линий, которые несовместимы по направлению с обобщенным вектором направления всех линий соответствующего набора;
формируют продольную опорную линию на основе изображения, реконструированного в среднесагиттальной плоскости, и анатомических точек, обнаруженных в этом изображении.
формируют детектор продольной фиссуры мозга как полосы, покрывающей множество пикселей, используемых для вычисления заданного числового критерия в определенном положении этого детектора;
создают сплошную бинарную маску как плоскую фигуру, покрывающую область мозга в рабочем сечении изображения;
вычисляют главные оси вышеназванной бинарной маски;
выбирают рабочую зону для обнаружения продольной щели мозга в исследуемом сечении на основе геометрии вышеназванной бинарной маски, задают параметры для изменения положения вышеназванного детектора в рабочей зоне - диапазонов изменения координат его центра и угла поворота;
определяют оптимальную позицию детектора в предписанной рабочей зоне с помощью оптимизации вышеназванного численного критерия;
вычисляют вышеназванную опорную линию в рабочем сечении как центральную ось детектора в найденном его оптимальном положении.
вычисляют вектор V1 как обобщенное направление всех аксиальных опорных линий;
вычисляют граничные точки всех аксиальных опорных линий как точки пересечения указанных линий с границами бинарных масок в соответствующих аксиальных сечениях;
вычисляют центральную точку P1 с координатами, определенными как осредненные координаты вышеназванных граничных точек;
выполняют построение плоскости PL1, ортогональной к вышеназванному вектору V1 и проходящей через вышеназванную центральную точку P1;
определяют точки пересечения всех вышеназванных опорных линий из аксиального набора с построенной плоскостью PL1, формируют множество точек пересечения;
выполняют построение опорной линии V2 как регрессионной прямой, проходящей через множество вышеназванных точек пересечения;
выполняют построение среднесагиттальной плоскости как плоскости, вектор нормали которой ортогонален к вышеназванным векторам V1, V2, и проходящей через ранее найденную точку P1.
вычисляют вектор V1 как обобщенное направление всех аксиальных опорных линий;
вычисляют граничные точки всех аксиальных опорных линий как точки пересечения указанных линий с границами бинарных масок в соответствующих аксиальных сечениях;
вычисляют центральную точку P1 с координатами, определенными как осредненные координаты вышеназванных граничных точек;
выполняют построение плоскости PL1, ортогональной к вышеназванному вектору V1 и проходящей через вышеназванную центральную точку P1;
определяют точки пересечения всех вышеназванных опорных линий из аксиального набора с построенной плоскостью PL1, формируют множество точек пересечения;
выполняют построение опорной линии V2 как регрессионной прямой, проходящей через множество вышеназванных точек пересечения;
осуществляют вычисление вектора V_COR как обобщенного вектора направлений всех корональных опорных линий;
осуществляют вычисление вектора направления V3 как взвешенной суммы вышеописанных векторов V2 и обобщенного вектора V_COR направлений корональных опорных линий;
выполняют построение среднесагиттальной плоскости как плоскости, вектор нормали которой ортогонален к вышеназванным векторам V1, V2, и проходящей через ранее найденную точку P1.
выполняют вычисление граничных точек для всех линий в вышеназванном аксиальном наборе опорных линий, как точек пересечения этих линий с краями бинарных масок, покрывающих изображение мозга в соответствующих сечениях;
выполняют вычисление граничных точек для всех линий в вышеназванном корональном наборе опорных линий, как точек пересечения этих линий с краями бинарных масок, покрывающих изображение мозга в соответствующих сечениях;
выполняют вычисление среднесагиттальной плоскости как регрессионной плоскости, проведенной через вышеназванные точки в смысле наименьших квадратов.
блок формирования трехмерного скаут-изображения мозга, выполненный с возможностью сбора данных медицинского изображения, формирования из них трехмерного скаут-изображения и передачи его в блок выбора рабочих сечений и в блок реконструкции среднесагиттального изображения мозга;
блок выбора рабочих сечений, выполненный с возможностью анализа вышеназванного скаут-изображения, выбора аксиальных и корональных рабочих сечений, формирования из них двух соответствующих наборов и передачи этих двух наборов в блоки вычисления опорных линий в сечениях, раздельно для аксиальных и корональных сечений соответственно;
блок вычисления опорных линий в аксиальных сечениях, выполненный с возможностью анализа аксиальных сечений, обнаружения в них следов продольной фиссуры мозга, вычисления опорных линий как центральных осевых линий вышеназванных обнаруженных следов и передачи этих опорных линий в блок фильтрации аксиальных опорных линий;
блок вычисления опорных линий в корональных сечениях, выполненный с возможностью анализа корональных сечений, обнаружения в них следов продольной фиссуры мозга, вычисления опорных линий как центральных осевых линий вышеназванных обнаруженных следов и передачи этих опорных линий в блок фильтрации корональных опорных линий;
блок фильтрации аксиальных опорных линий, выполненный с возможностью анализа принятого набора аксиальных опорных линий, исключения из набора тех линий, вектор направления которых существенно отличается от обобщенного вектора направления всей совокупности линий, входящих в набор, и передачи прореженного таким образом набора опорных линий в блок вычисления ССП;
блок фильтрации корональных опорных линий, выполненный с возможностью анализа принятого набора корональных опорных линий, исключения из набора тех линий, вектор направления которых существенно отличается от обобщенного вектора направления всей совокупности линий, входящих в набор, и передачи прореженного таким образом набора опорных линий в блок вычисления ССП;
блок вычисления ССП, выполненный с возможностью приема вышеназванных наборов аксиальных и корональных опорных линий, формирования на их основе плоскости с применением метода наименьших квадратов и передачи параметров этой плоскости в блок реконструкции среднесагиттального изображения мозга и в блок выходного интерфейса планирования видов;
блок реконструкции среднесагиттального изображения мозга, выполненный с возможностью приема параметров вышеназванной ССП и трехмерного скаут-изображения, формирования среднесагиттального изображения мозга на основе сечения скаут-изображения вышеназванной ССП и передачи этого изображения в блок обнаружения анатомических точек;
блок обнаружения анатомических точек, выполненный с возможностью приема вышеназванного среднесагиттального изображения мозга, анализа его, нахождения, по меньшей мере, двух анатомических точек оговоренного типа и передачи координат этих точек в блок формирования продольной опорной линии;
блок формирования продольной опорной линии, выполненный с возможностью приема координат вышеназванных анатомических точек, вычисления продольной опорной линии на основе этих точек и передачи параметров вычисленной опорной линии в блок выходного интерфейса планирования видов;
блок выходного интерфейса планирования видов, выполненный с возможностью приема вышеназванной ССП и продольной опорной линии и передачи их параметров в систему управления медицинским сканером.
блок создания бинарной маски мозга в рабочем сечении, выполненный с возможностью приема серого двумерного изображения рабочего сечения, вычисления сплошной бинарной маски, покрывающей изображение мозга в рабочем сечении, и передачи изображения этой бинарной маски в блок определения главных осей бинарной маски;
блок определения главных осей бинарной маски, выполненный с возможностью приема изображения вышеназванной бинарной маски, вычисления главных осей этой бинарной маски и передачи параметров этих осей в блок определения рабочей зоны;
блок определения рабочей зоны, выполненный с возможностью анализа вышеназванной бинарной маски и ее главных осей, определения рабочей зоны для работы детектора следа продольной фиссуры мозга в сечении, определения диапазонов горизонтального перемещения и угла поворота для проверяемого положения вышеназванного детектора и передачи этих параметров в блок обнаружения следа продольной щели мозга в рабочем сечении;
блок обнаружения следа продольной фиссуры мозга в рабочем сечении, выполненный с возможностью приема параметров вышеназванной рабочей зоны и вычисленных диапазонов позиционирования вышеназванного детектора, тестирования детектора во всех возможных позициях в предписанном диапазоне с вычислением количественного критерия путем анализа пикселей, охватываемых детектором в каждом из его тестируемых положений, сравнения вычисленных величин критерия для всех исследованных позиций детектора и нахождения позиции, соответствующей оптимальному значению критерия, передачи геометрических параметров этой найденной оптимальной позиции детектора в блок вычисления опорной линии;
блок вычисления опорной линии, выполненный с возможностью приема геометрических параметров вышеназванной оптимальной позиции детектора и вычисления опорной линии как серединной оси детектора, расположенного в оптимальной позиции в рабочем сечении.
Комментарии