Способ радиоэлектронной защиты наземной рлс кругового обзора и устройство для его реализации - RU2586112C1
Код документа: RU2586112C1
Чертежи
Описание
Способ радиоэлектронной защиты наземной РЛС кругового обзора и устройство для его реализации относятся к области радиолокации, и конкретно к способам и системам радиоэлектронной защиты активных РЛС от активных шумовых помех (АШП) различного происхождения, воздействующих по боковым лепесткам диаграммы направленности приемной антенны, путем их компенсации. Устройство может использоваться в наземных РЛС различного назначения, осуществляющих круговой обзор рабочего сектора путем механического вращения антенны в азимутальной плоскости и работающих в режиме низкой [1] частоты зондирующих посылок.
Известен способ радиоэлектронной защиты РЛС от АШП, воздействующих по боковым лепесткам диаграммы направленности антенны (ДНА), путем их когерентной компенсации [1].
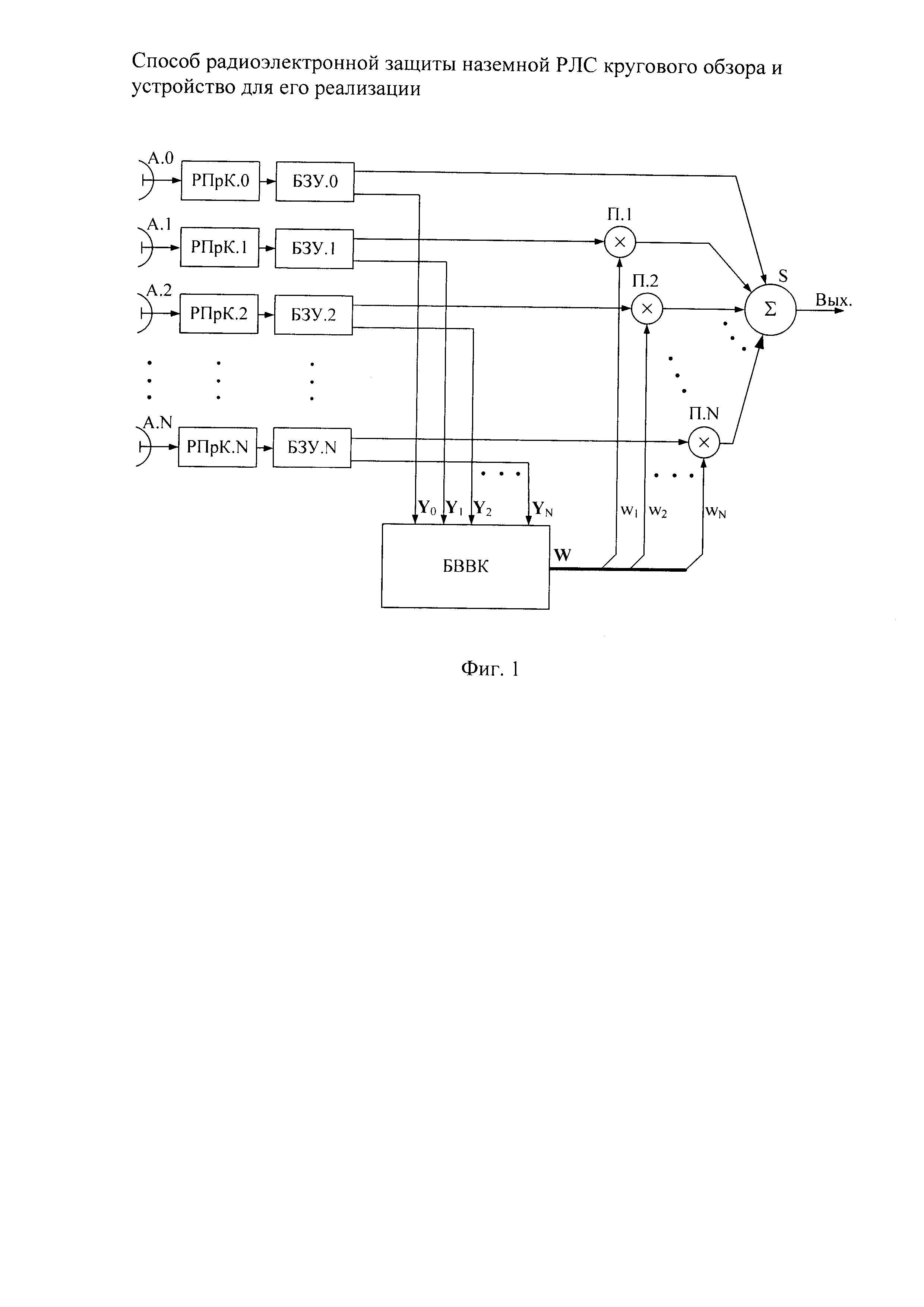
Известно устройство (фиг. 1) [1], реализующее известный способ, состоящее из: антенны основного канала А.0, антенн компенсационных каналов А.1-A.N, идентичных радиоприемных каналов с цифровым выходом РПрК.0-РПрК.N, буферных запоминающих устройств БЗУ.0-БЗУ.N, блока вычисления весовых коэффициентов (БВВК), комплексных умножителей П.1-П.N и комплексного сумматора S.
Работа известного устройства происходит следующим образом.
Максимум ДНА основного (защищаемого) канала РЛС устанавливается в заданном угловом направлении путем механического поворота антенны либо заданием соответствующего амплитудно-фазового распределения на ее раскрыве. Максимумы ДНА компенсационных каналов аналогичными способами устанавливаются в направлениях прихода помех (в направлениях источников помех). Максимум диаграммы направленности передающей антенны устанавливается в том же направлении, что и диаграмма направленности приемной антенны основного канала. Производится зондирование углового направления серией импульсов с низкой частотой повторения (период повторения импульсов соответствует интервалу однозначного измерения дальности) с приемом эхо-сигналов и помех в интервалах между зондированиями. Принятые сигналы после аналого-цифрового преобразования помещаются в буферные запоминающие устройства (БЗУ) соответствующих каналов. Интервалы приема следуют за интервалами излучения импульсов. Число интервалов приема равно числу излученных импульсов.
Согласно [1], метод, использующийся для случая низкой частоты повторения импульсов РЛС, исключает влияние ближайших мешающих отражений на адаптивные весовые коэффициенты за счет простого выбора свободных от отражений элементов разрешения по дальности (обучающей выборки) в конце каждого интервала приема.
Обучающие выборки интервалов анализа поступают в БВВК, где для каждого из периодов повторения зондирующих импульсов производится оценка вектора весовых коэффициентов W. Оценка W производится по выражению

где µ - произвольная постоянная величина;
R=E(Y*YT) - N-мерная ковариационная матрица;
Е - операция нахождения математического ожидания;
* - операция комплексного сопряжения;
Т - операция транспонирования;
V=(Y1,Y1,…,YN) - N-мерный вектор, содержащий набор сигналов одного и того же элемента разрешения по дальности от N вспомогательных антенн;
N - количество компенсационных каналов;
Q=E(YMY*) - вектор ковариации;
YM - радиолокационный сигнал, принятый из элемента разрешения по дальности.
В соответствии с (1) производится расчет векторов весовых коэффициентов W для М периодов повторения зондирующих импульсов. Результатом расчетов является матрица U размера N на М элементов.
Далее происходит компенсация помех в основном канале путем суммирования его сигнала с сигналами компенсационных каналов, взвешенными вектором W. Взвешенное суммирование сигналов каждого периода производится с использованием своего вектора весовых коэффициентов W1, W2 … WM.
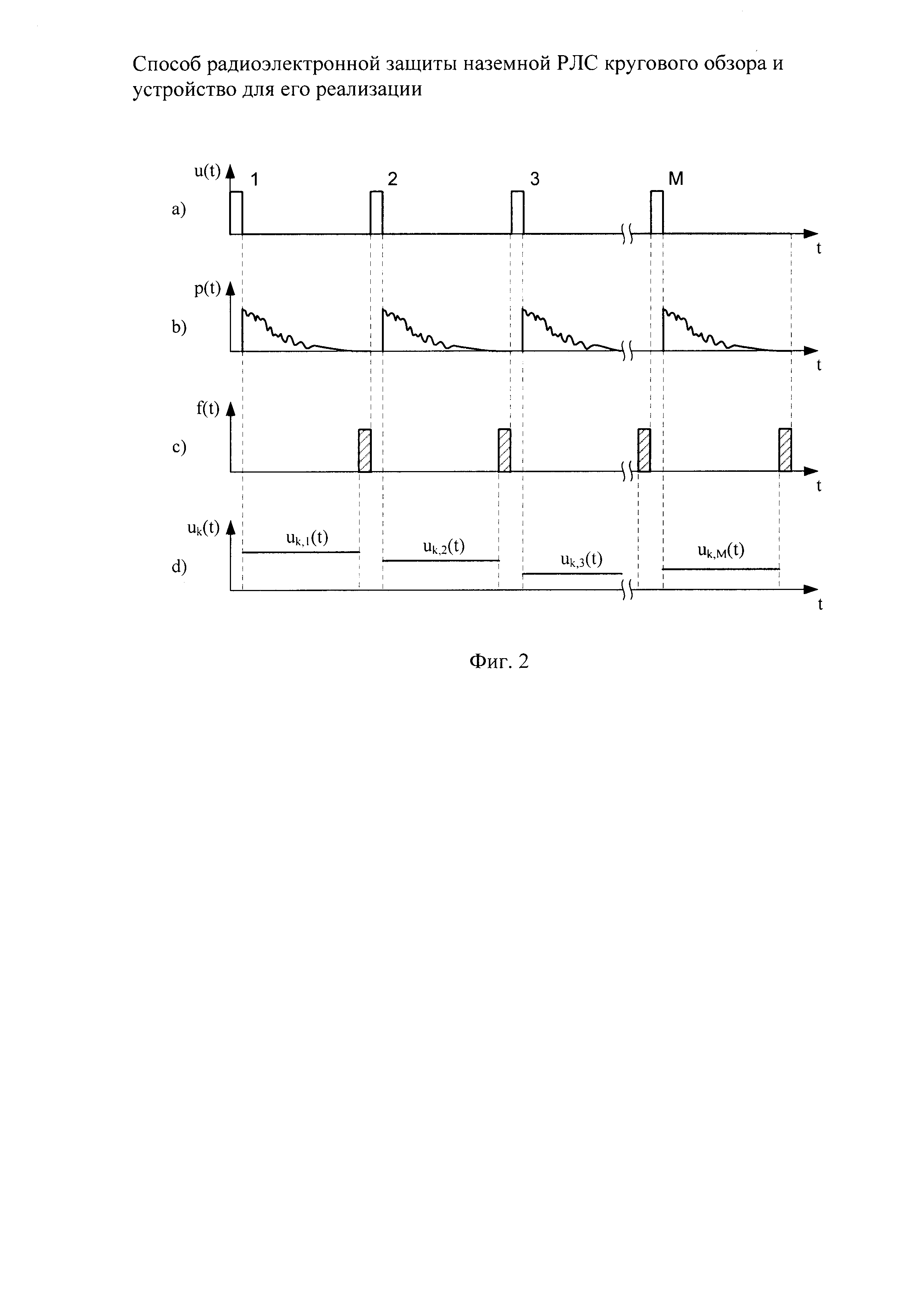
На фиг. 2 приведен пример временных диаграмм работы РЛС, поясняющий целесообразность выбора интервалов противопомеховой адаптации для системы компенсации помех. На фиг. 2а показаны зондирующие импульсы РЛС, на фиг. 2b показана зависимость интенсивности отражений от подстилающей поверхности и местных предметов от момента зондирования, на фиг. 2с показано расположение интервалов противопомеховой адаптации. На фиг. 2d качественно приведено изменение значения элемента весового вектора Wk k-го приемного канала.
Недостатком известных способа и устройства, препятствующим достижению потенциальной эффективности компенсации помех, является быстрое изменение мощности и направления прихода помехи, обусловленное вращением антенны [1, 3]. Физический смысл когерентной компенсации помех по боковым лепесткам заключается в формировании «провалов» в ДНА основного канала в направлениях прихода помех. При равномерном вращении антенной системы за время когерентного накопления сигнала РЛС происходит смещение сформированных «провалов» относительно направлений прихода помех, следствием чего является неполная их компенсация и рост мощности помех в основном канале РЛС.
В качестве наиболее близких аналогов выбраны рассмотренные способ радиоэлектронной защиты РЛС от АШП, воздействующих по боковым лепесткам ДНА путем их когерентной компенсации и устройство, реализующее данный способ [1].
Техническим результатом изобретения является повышение эффективности компенсации помех, воздействующих по боковым лепесткам ДНА РЛС кругового обзора с механическим вращением антенны.
Технический результат достигается использованием динамических весовых коэффициентов, получаемых интерполяцией ряда оценок весового вектора, полученных в свою очередь в различные моменты зондирования РЛС одного углового направления.
Реализация заявленного способа радиоэлектронной защиты наземной РЛС кругового обзора по азимуту требует М+1 интервалов противопомеховой адаптации, первые М из которых находятся непосредственно перед зондирующими импульсами, а последний - в конце последнего периода. Выбор числа интервалов противопомеховой адаптации обусловлен числом зондирующих импульсов и необходимостью знания значений функции на концах интерполируемого отрезка.
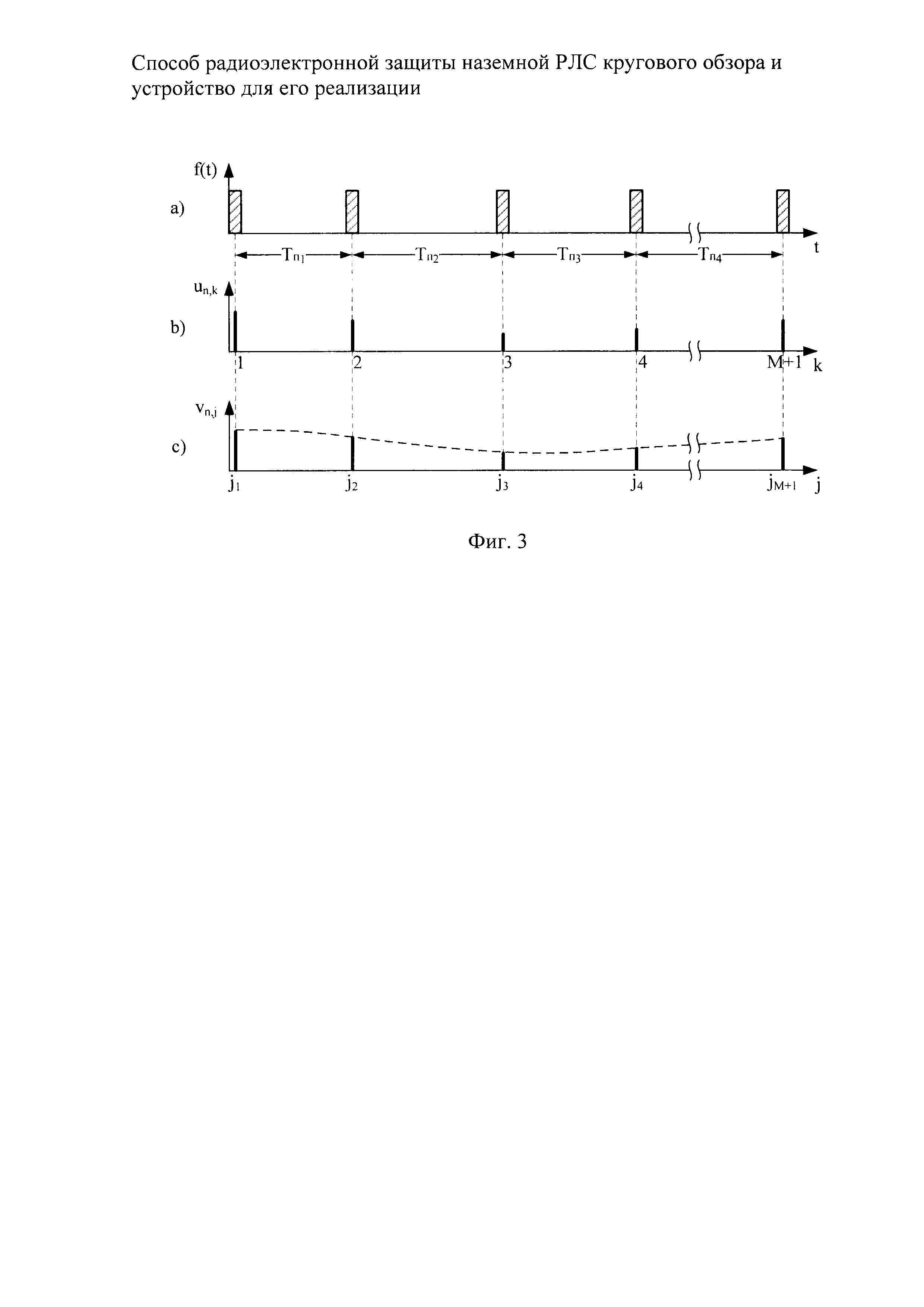
Суть заявленного способа радиоэлектронной защиты наземной РЛС кругового обзора состоит в интерполяции промежуточных значений элементов вектора весовых коэффициентов W, рассчитываемых непосредственно перед зондирующими импульсами и в конце последнего периода на весь обрабатываемый сигнал. Принцип использования динамического весового коэффициента для одного приемного канала показан на фиг. 3. На фиг. 3а показы интервалы противопомеховой адаптации, интервалы между центрами которых соответствуют периодам повторения зондирующих импульсов. Длительность периодов повторения зондирующих посылок в РЛС с низкой частотой повторения зондирующих импульсов, как правило, не является постоянной. На фиг. 3b показано расположение значений элементов n-й строки матрицы весовых коэффициентов U, соответствующих интервалам анализа. На фиг. 3с пунктиром показан динамический весовой коэффициент, являющийся интерполяционным полиномом Лагранжа, полученным интерполяцией значений элементов n-й строки матрицы весовых коэффициентов U в каждом дискретном отсчете массива динамического весового коэффициента v, число элементов которого соответствует суммарной длительности всех совместно обрабатываемых периодов принятого сигнала. Индекс j соответствует номеру дискретного отсчета принятого сигнала при сквозной нумерации по всей его длительности.
В способе радиоэлектронной защиты наземной РЛС кругового обзора применена интерполяция полиномами Лагранжа для случая произвольно заданных узлов [4]. Для каждого приемного канала массив значений динамического весового коэффициента рассчитывается по формуле

где


хс - номер интервала противопомеховой адаптации;
yr - значение весового коэффициента в r-м интервале противопомеховой адаптации;
М - число периодов зондирующего сигнала.
При квадратурной обработке сигналов расчет динамического весового коэффициента производится для каждой квадратуры.
При компенсации помех используются динамические весовые коэффициенты, позволяющие в каждый момент времени обеспечить более высокую ортогональность компенсируемых помех и, следовательно, более высокое их подавление.
Физический смысл использования динамических весовых коэффициентов объясняется электронным удержанием «провалов» в ДНА основного канала в направлениях прихода помех при перемещении ДНА синхронно механическому вращением антенной системы РЛС по азимуту.
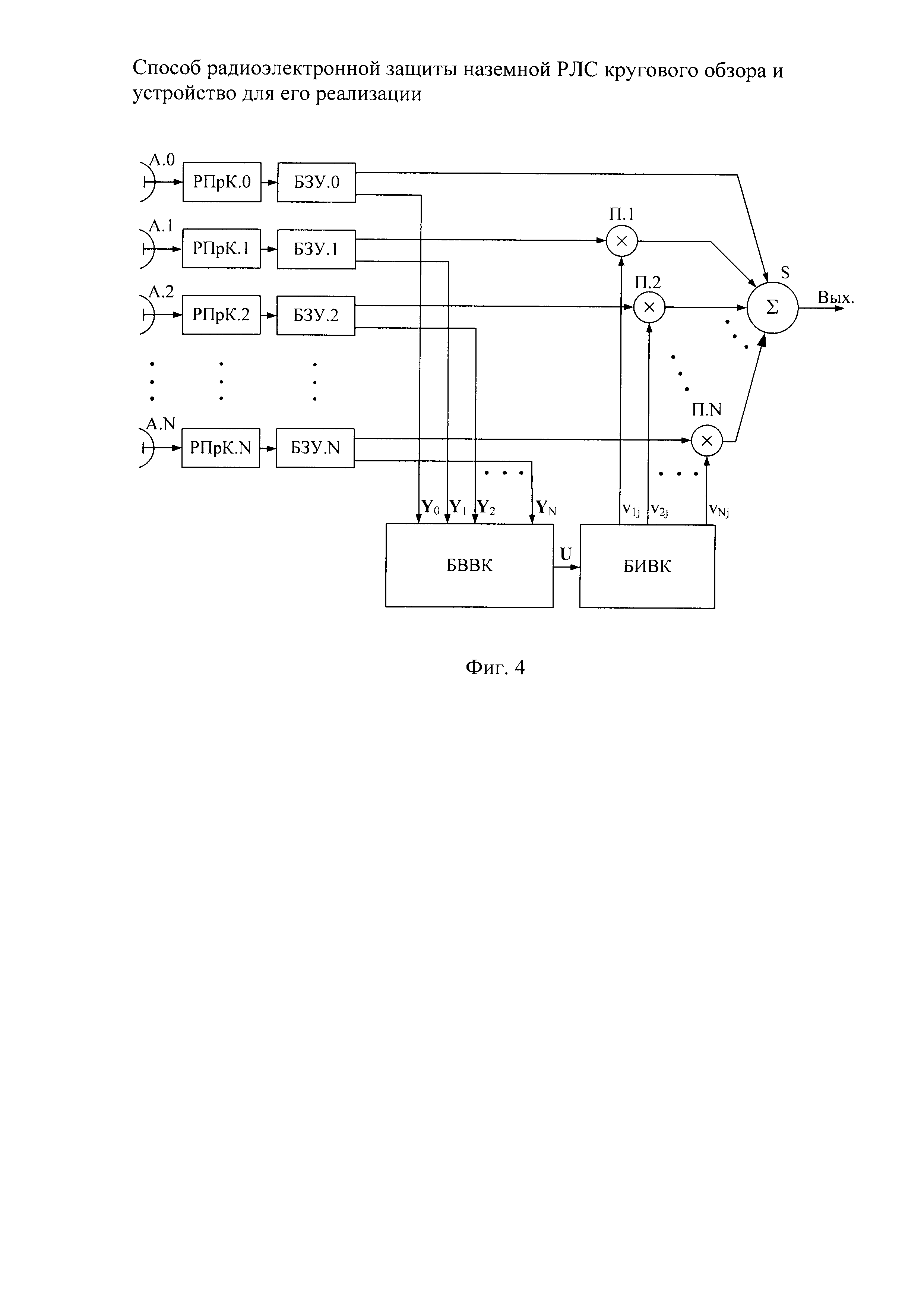
Заявленное устройство радиоэлектронной защиты наземной РЛС кругового обзора (фиг. 4), состоящее из: антенны основного канала А.0, антенн компенсационных каналов А.1-A.N, идентичных радиоприемных каналов с цифровым выходом РПрК.0-РПрК.N, буферных запоминающих устройств БЗУ.0-БЗУ.N, БВВК, блока интерполяции весовых коэффициентов (БИВК), комплексных умножителей П.1-П.N и комплексного сумматора S, отличается от известного наличием БИВК и применением динамических весовых коэффициентов, поступающих на комплексные умножители П.1-П.N из БИВК. Благодаря чему заявленное устройство обеспечивает более эффективное подавление АШП, воздействующих по боковым лепесткам ДНА основного канала при вращении антенны РЛС в азимутальной плоскости.
Изобретения иллюстрируются следующими чертежами:
Фиг. 1 - структурная схема известного устройство автоматической компенсации АШП по боковым лепесткам ДНА;
A.1-A.N - приемные антенны, из которых А.0 - антенна основного канала, a A.1-A.N - антенны компенсационных каналов;
РПрК.0-РПрК.N - радиоприемные каналы с цифровым выходом, реализующие классические функции обработки радиосигналов;
ВЗУ.0-ВЗУ.N - буферные запоминающие устройства;
П.1-П.N - комплексные умножители;
S - комплексный сумматор;
БВВК - вычислитель весовых коэффициентов.
Фиг. 2 - пример временных диаграмм работы РЛС, поясняющий целесообразность выбора интервалов противопомеховой адаптации для системы компенсации помех. На фиг. 2а показаны зондирующие импульсы РЛС, на фиг. 2b показана зависимость интенсивности отражений от подстилающей поверхности и местных предметов от момента зондирования, на фиг. 2с показан рациональный выбор интервалов противопомеховой адаптации. На фиг. 2d качественно приведено изменение значения одного из элементов Wk весового вектора W.
Фиг. 3 - принцип использования динамического весового коэффициента одного приемного канала. На фиг. 3а показа интервалы противопомеховой адаптации. На фиг. 3b показано расположение на оси времени значений n-й строки матрицы весовых коэффициентов U. На фиг. 3с пунктиром показан интерполяционный полином Лагранжа, полученный интерполяцией значений элементов n-ой строки матрицы весовых коэффициентов U в каждом дискретном отсчете массива динамического весового коэффициента v.
Фиг. 4 - структурная схема заявленного устройства радиоэлектронной защиты наземной РЛС кругового обзора;
A.1-A.N - приемные антенны, из которых А.0 - антенна основного канала, a A.1-A.N - антенны компенсационных каналов;
РПрК.0-РПрК.N - радиоприемные каналы с цифровым выходом, реализующие классические функции обработки радиосигналов;
БЗУ.0-БЗУ-N - буферные запоминающие устройства;
П.1-П.N - комплексные умножители;
S - комплексный сумматор;
БВВК - вычислитель весовых коэффициентов;
БИВК - блок интерполяции весовых коэффициентов.
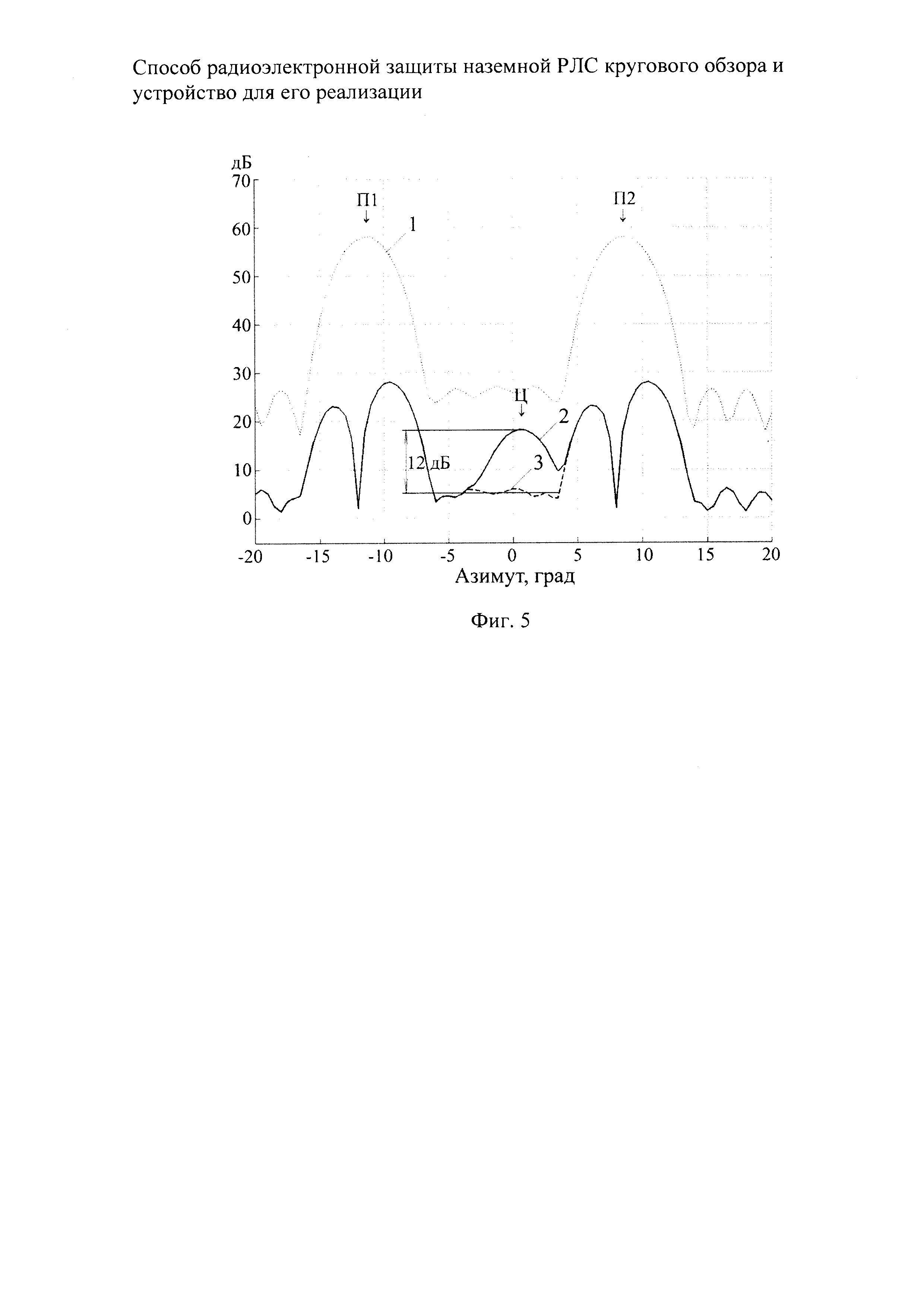
Фиг. 5 - зависимости суммарной мощности помех, сигнала цели и шумов приемника от азимутального положения антенны до компенсации (1), после компенсации при наличии цели (2) и после компенсации в отсутствие цели (3) при использовании известного способа радиоэлектронной защиты РЛС от АШП. На фиг. 4 условно обозначены П1, П2 и Ц - азимутальные направления на 2 источника помех и цель соответственно.
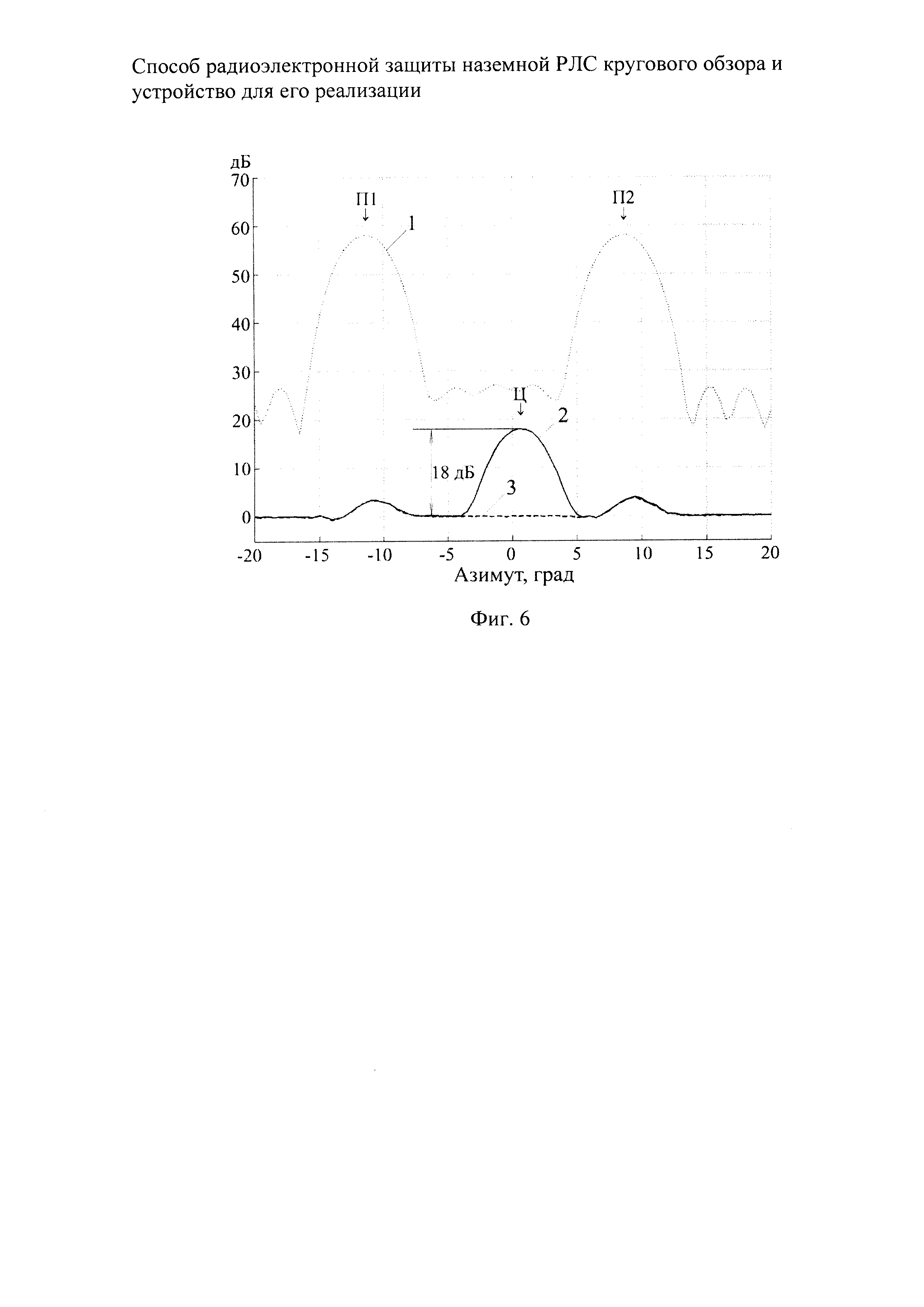
Фиг. 6 - зависимости суммарной мощности помех, сигнала цели и шумов приемника от азимутального положения антенны до компенсации (1), после компенсации при наличии цели (2) и после компенсации в отсутствие цели (3) при использовании заявленного способа радиоэлектронной защиты наземной РЛС кругового обзора. На фиг. 5 условно обозначены П1, П2 и Ц-азимутальные направления на 2 источника помех и цель соответственно.
Заявленный способ включает:
установку диаграмм направленности приемной и передающей антенн основного канала в заданном угловом направлении, установку ДНА компенсационных каналов в направлениях прихода помех, производство зондирования пространства серией импульсов с низкой частотой повторения, последующий прием, аналого-цифровое преобразование и сохранение в оперативной памяти сигналов каждого приемного канала;
расчет по (1) матрицы векторов весовых коэффициентов с последующей их интерполяцией полиномом Лагранжа по (2) по всей длительности хранящихся в оперативной памяти сигналов;
компенсацию помех в основном канале путем суммирования его сигнала с сигналами компенсационных каналов, взвешенными динамическими весовыми коэффициентами.
Заявленное устройство радиоэлектронной защиты наземной РЛС кругового обзора (фиг. 4), реализующее заявленный способ, состоит из: антенны основного канала А.0, антенн компенсационных каналов A.1-A.N по числу источников помех, идентичных радиоприемных каналов с цифровым выходом РПрК.0-РПрК.N, буферных запоминающих устройств БЗУ.0-БЗУ.N, БВВК, БИВК, комплексных умножителей П.1-П.N и комплексного сумматора S.
Работа заявленного устройства радиоэлектронной защиты наземной РЛС кругового обзора (фиг. 4) осуществляется в четыре этапа.
На первом этапе, максимум ДНА основного канала РЛС устанавливается в заданном угловом направлении путем механического поворота антенны либо заданием соответствующего амплитудно-фазового распределения на ее раскрыве. Максимумы ДНА компенсационных каналов аналогичными способами устанавливаются в направлениях прихода помех. Максимум диаграммы направленности передающей антенны устанавливается в том же направлении, что и диаграмма направленности приемной антенны основного канала. Производится зондирование углового направления серией импульсов с низкой частотой повторения с приемом сигналов в интервалах между зондированиями. Принятые сигналы, на выходе приемных каналов, преобразуются в цифровую форму и помещаются в БЗУ соответствующего приемного канала.
На втором этапе из БЗУ в БВВК поступают обучающие выборки интервалов анализа, на основе которых согласно (1) производится расчет векторов весовых коэффициентов для каждого интервала анализа. Всего производится расчет М+1 векторов весовых коэффициентов, где М - число зондирующих импульсов. Каждый интервал анализа содержит определенное число выборок сигнала (как правило от 20 до 200). М интервалов анализа расположены перед соответствующими зондирующими импульсами, один интервал анализа - в конце последнего периода. Результатом второго этапа является матрица U размера N на М+1 элементов, содержащая М+1 векторов весовых коэффициентов W размерностью N каждый.
На третьем этапе БИВК производит интерполяцию весовых коэффициентов полиномом Лагранжа. На вход БИВК поступает матрица U, на основе которой в соответствии с (2) производится расчет интерполированных значений динамических весовых коэффициентов. Результатом расчетов является двумерный массив динамических весовых коэффициентов, содержащий N динамических весовых коэффициентов объемом, соответствующим числу элементов принятого и хранящегося в БЗУ сигнала каждый.
На четвертом этапе производится когерентная компенсация помех в основном канале. При этом сигналы, хранящиеся в БЗУ, поэлементно перемножаются комплексными умножителями П.1-П.N с аналогичными по длительности соответствующими динамическими весовыми коэффициентами. Полученные в результате данной операции цифровые сигналы поэлементно суммируются комплексным сумматором S. С выхода комплексного сумматора S снимается цифровой сигнал основного канала, очищенный от помех, принятых компенсационными каналами. Далее сигнал основного канала подвергается дальнейшей обработке системами РЛС.
На всех этапах работы заявленного устройства сигнал представлен в цифровой квадратурной (комплексной) форме. Расчеты по (1) и (2) производятся по каждой из квадратур сигнала в отдельности.
Заявленный технический результат подтвержден результатами, полученными методом имитационного компьютерного моделирования радиолокационной системы со следующими техническими характеристиками.
Антенна основного канала - эквидистантная ФАР с цифровым диаграмообразованием, число приемных элементов (гориз.*верт.) 40*40, амплитудное распределение ханна на пьедестале 0.2 в обеих плоскостях, расстояние между приемными элементами 0.5λ по азимуту и 0.5λ по углу места. ДНА основного канала не отклонена от нормали. ДНА компенсационных каналов в начале каждого обзора углового направления ориентированы на соответствующие источники помех. ФАР расположена строго вертикально.
Антенны компенсационных каналов - подрешетки ФАР основного канала, расположенные в центре ФАР основного канала, число приемных элементов (гориз.*верт.) 10*40, амплитудное распределение равномерное.
Радиоприемные тракты основного и компенсационных каналов идентичны и имеют сквозную полосу пропускания 1,25 МГц.
Зондирующий сигнал - когерентная пачка из 5 импульсов, средний период повторения 1 мс, длительность импульса 0.2 мс. Объем интервала анализа - 128 выборок.
Скорость обзора пространства (вращения антенны по азимуту) 120%.
Исходные данные, использованные при моделировании, следующие.
Помехи - активные шумовые с постоянной спектральной плотностью мощности в полосе приемного устройства РЛС, воздействующие с направлений -11.5° и 8.5° по азимуту и 0° по углу места. Отношение помеха/шум приемника на его выходе (без компенсации) 58 дБ по уровню ДНА основного канала 0 дБ.
Цель - точечная, не флуктуирующая, азимут 0.5°, угол места 0°, отношение (сигнал цели)/шум, приведенное к входу приемника, 18 дБ.
На фиг. 5 приведены зависимости суммарной мощности помех, сигнала цели и шумов приемника от азимутального положения антенны до компенсации (1), после компенсации при наличии цели (2) и после компенсации в отсутствие цели (3) при использовании известного способа радиоэлектронной защиты РЛС от АШП.
На фиг. 6 приведены, аналогичные фиг. 5, зависимости при использовании заявленного способа радиоэлектронной защиты наземной РЛС кругового обзора для тех же условий.
Сравнение фиг. 5 и фиг. 6 показывает, что в первом случае имеет место превышение сигнала цели над уровнем аддитивной смеси помех и шумов приемных каналов на 12 дБ, против 18 дБ во втором случае.
Эффективность технического результата зависит от параметров антенной системы РЛС, скорости ее вращения, частоты повторения зондирующих импульсов и др. факторов. В рассмотренной ситуации повышение отношения мощности сигнала к мощности аддитивной смеси помехи и шумов приемных каналов, за счет повышения эффективности компенсации помех, составило 6 дБ, что подтверждает достижение заявленного технического результата. Потенциальная эффективность технического результата - полное устранение влияния вращения антенной системы РЛС на качество компенсации АШП.
Таким образом достигается заявляемый технический результат.
Литература
1. Справочник по радиолокации под ред. М.И. Сколника. Пер. с англ. Под общей ред. B.C. Вербы. Книга 2. М.: Техносфера, 2014.
2. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. - М.: Радио и связь, 2003.
3. A. Farina, P. Langsford, G.C. no, L. Timmoneri, and R. Tosini, «ЕССМ techniques for a rotating, multifunction, phased-array radar» Proc of the 25thEuropean Microwave Conf., Bologna (Italy), September 4-7, 1995, pp. 490-495.
4. Ващенко Г.В. Вычислительная математика: основы алгебраической и тригонометрической интерполяции. Красноярск: СибГТУ, 2008.
Реферат
Изобретения относятся к области радиолокации, и конкретно к способам и системам радиоэлектронной защиты активных радиолокационных станций (РЛС) от активных шумовых помех. Достигаемый технический результат - повышение эффективности компенсации активных шумовых помех, воздействующих по боковым лепесткам диаграммы направленности антенны РЛС кругового обзора с механическим вращением антенны. Указанный результат достигается применением динамических весовых коэффициентов при весовом суммировании сигнала основного канала с сигналами компенсационных каналов, позволяющим компенсировать быстрое изменение мощности помех в приемных каналах, обусловленное вращением антенны. 2 н.п. ф-лы, 6 ил.
Комментарии