Способ прямой идентификации воздушных целей - RU2701721C1
Код документа: RU2701721C1
Чертежи
Описание
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации воздушных целей, реализуемый в радиолокационной системе с активным ответом (автономной системе опознавания с активным ответом), основанный на последовательном обнаружении с использованием бортовой РЛС и измерении их угловых координат и дальностей до них, выборе цели для идентификации (идентифицируемой цели) с помощью оператора или в автоматическом режиме, формировании за-просчиком радиолокационной системы с активным ответом (РСАО) L кодированных запросных сигналов и последовательном излучении их в направлении идентифицируемой цели, приеме и обработке каждого



К недостаткам данного способа относится существенное снижение вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки. Одной из основных причин этого является обнаружение импульсов ответных сигналов других целей на временных позициях ответных сигналов идентифицируемой цели.
Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки.
Указанный результат достигается тем, что в известном способе идентификации после обнаружении запросчиком РСАО импульсов на частотах ответного сигнала определяют n-е цели, удовлетворяющие условию местонахождения в пространственном объеме неопределенности запросчика РСАО, для каждых


Сущность изобретения заключается в том, что формирование оценки идентификационного признака идентифицируемой воздушной цели осуществляется с учетом возможного обнаружения импульсов ответных сигналов других целей на временных позициях ее ответных сигналов, путем использования ожидаемых и характерных временных позиций, определяемых по всем целям, удовлетворяющим условию местонахождения в пространственном объеме неопределенности запросчика РСАО.
Данный способ включает в себя следующие этапы:
1. Последовательное обнаружение с использованием бортовой РЛС S воздушных целей и измерение их угловых координат в горизонтальной
2. Выбор цели для идентификации (идентифицируемой цели) с помощью оператора или в автоматическом режиме;
3. Формирование запросчиком РСАО L кодированных запросных сигналов и последовательное излучение их в направлении идентифицируемой цели;
4. Прием и обработка каждого l-го запросного сигнала ответчиками РСАО, находящимися в зоне действия запросного сигнала, где
5. Формирование и передача ответчиками РСАО, находящимися в зоне действия запросного сигнала, в ответ на каждый

6. Обнаружение запросчиком РСАО импульсов на частотах ответного сигнала с фиксацией соответствующих моментов времени обнаружения



7. Определение n-x целей, удовлетворяющих условию местонахождения в пространственном объеме неопределенности запросчика РСАО ΔVз1 в соответствии с пунктами 7.1-7.2:
7.1 Определение признаков ζs местонахождения целей в пространственном объеме неопределенности запросчика РСАО ΔVз1 в соответствии с выражением
где
7.2 Присвоение целям с признаками ζs=1 нумерации в порядке возрастания от n=1 до n=N, где N - число целей, удовлетворяющих условию местонахождения в пространственном объеме неопределенности запросчика РСАО ΔVз1;
8. Определение ожидаемых временных позиций (временных позиций, на которых ожидается обнаружение хотя бы одного импульса ответного сигнала n-й цели, излучаемого в ответ на


8.1. Определение начальных моментов времени ожидания синхроимпульса



где с - скорость распространения радиоволны;

8.2. Определение временных позиций

где

8.3 Определение временных позиций

где


8.4. Определение временных позиций


где



9. Определение характерных временных позиций


где






здесь t0 - начальный момент времени ожидания синхроимпульса идентифицируемой цели, определяемый в соответствии с выражением

где ΔtAЗ - длительность аппаратурной задержки (время, затрачиваемое на обработку запросного сигнала и на формирование ответного сигнала ответчиком РСАО);
10. Определение общего числа ложных импульсов Nли (импульсов, обнаруженных на не являющихся ожидаемыми временных позициях) в соответствии с выражением

где

11. Определение числа правильных импульсов

12. Определение допустимого числа ложных импульсов hли в соответствии с выражением

где
13. Определение необходимого числа правильных импульсов

где

14. Формирование решения об идентификационном признаке идентифицируемой цели в соответствии с выражением

где
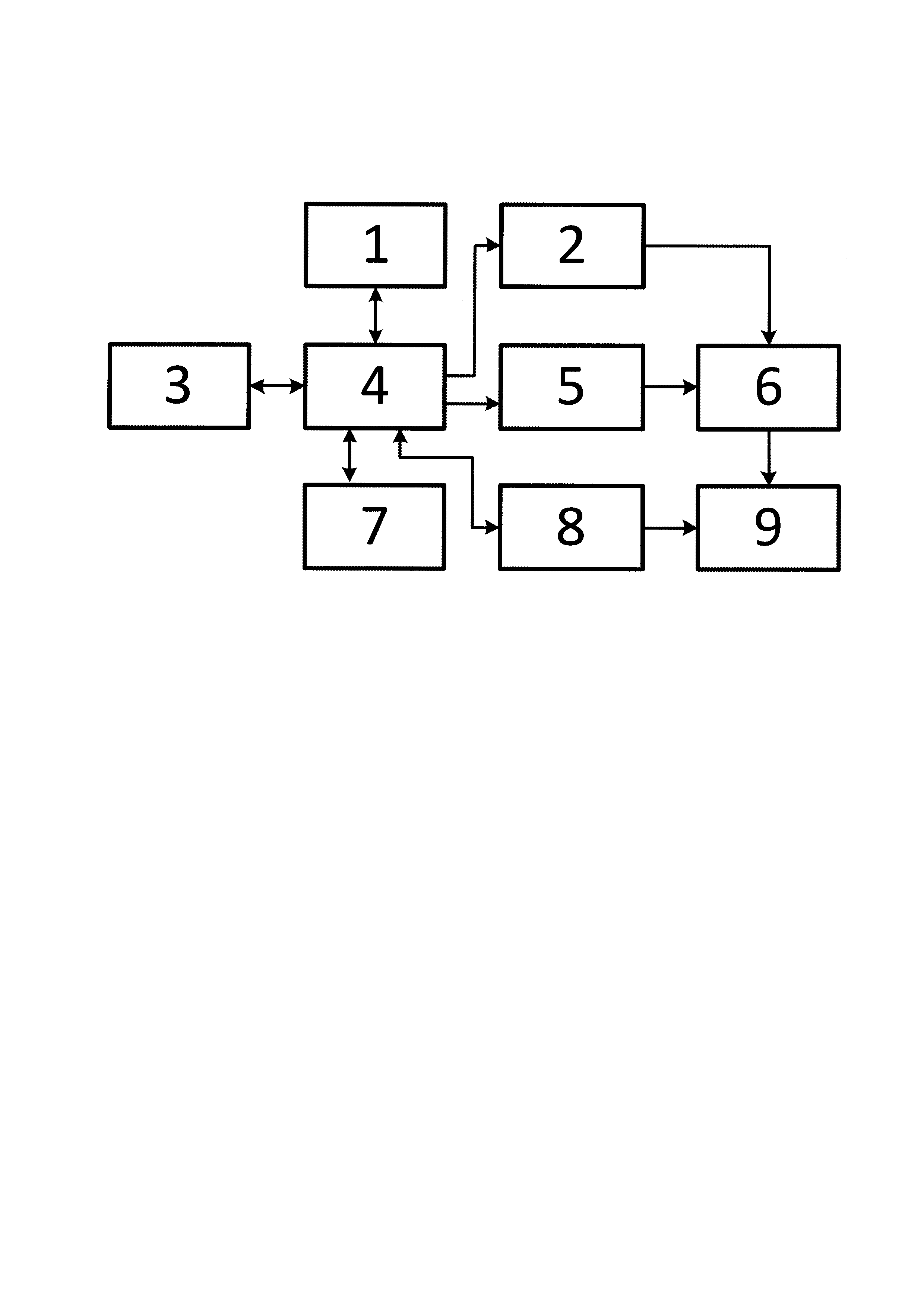
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре, где обозначено: 1 - запросчик РСАО, 2 - блок определения характерных временных позиций (БОХВП); 3 - бортовая РЛС; 4 - блок управления и хранения информации (БУХИ); 5 - блок определения ожидаемых временных позиций (БООВП); 6 -счетчик правильных и ложных импульсов (СПЛИ); 7 - блок выделения целей (БВЦ); 8 - блок определения пороговых значений (БОПЗ); 9 - блок формирования решения (БФР).
Запросчик РСАО 1 предназначен для формирования L кодированных запросных сигналов и последовательного излучения их в направлении идентифицируемой цели, а также обнаружения импульсов на частотах ответного сигнала, излучаемых ответчиками РСАО, расположенными в зоне действия запросного сигнала. БОХВП 2 предназначен для определения характерных временных позиций в соответствии с пунктом 9. Бортовая РЛС 3 предназначена для последовательного обнаружения воздушных целей и измерения их угловых координат и дальностей до них. БУХИ 4 предназначен для управления совместной работой запросчика РСАО 1, БОХВП 2, бортовой РЛС 3, БООВП 5, СПЛИ 6, БВЦ 7, БОПЗ 8 и БФР 9, а также для хранения и передачи текущей информации при необходимости соответствующим устройствам. БООВП 5 предназначен для определения ожидаемых временных позиций в соответствии с пунктом 8. СПЛИ 6 предназначен для определения общего числа ложных импульсов в соответствии с пунктом 10 и определения числа правильных импульсов для каждого n в соответствии с пунктом 11. БВЦ 7 предназначен для определения n-х целей, удовлетворяющих условию местонахождения в пространственном объеме неопределенности запросчика РСАО, в соответствии с пунктом 7. БОПЗ 8 предназначен для определения допустимого числа ложных импульсов в соответствии с пунктом 12 и для определения необходимого числа правильных импульсов в соответствии с пунктом 13. БФР 9 предназначен для формирования решения об идентификационном признаке идентифицируемой цели в соответствии с пунктом 14.
Устройство работает следующим образом. БУХИ 4 управляет совместной работой запросчика РСАО 1, БОХВП 2, бортовой РЛС 3, БООВП 5, СПЛИ 6, БВЦ 7, БОПЗ 8 и БФР 9, а также хранит и при необходимости передает текущую информацию соответствующим элементам устройства. Бортовая РЛС 3 последовательно обнаруживает воздушные цели и измеряет их угловые координаты и дальности до них. Запросчик РСАО 1 формирует L кодированных запросных сигналов и последовательно излучает их в направлении идентифицируемой цели, а также обнаруживает импульсы на частотах ответного сигнала, излучаемые ответчиками РСАО, расположенными в зоне действия запросного сигнала. БВЦ 7 определяет n-е цели, удовлетворяющие условию местонахождения в пространственном объеме неопределенности запросчика РСАО, в соответствии с пунктом 7. БООВП 5 определяет ожидаемые временные позиции для каждых


Для определения эффективности предлагаемого способа был оценен прирост вероятности правильной идентификации воздушных целей за счет применения предлагаемого способа по отношению к данному показателю с применением прототипа
где Р1 - вероятность правильной идентификации воздушной цели с применением предлагаемого способа, Р0 - вероятность правильной идентификации воздушной цели с применением прототипа. Величины Р0 и Р1 оценивались методом статистических испытаний с использованием имитационной модели РСАО, функционирующей в соответствии с прототипом и имитационной модели подсистемы прямой идентификации воздушных целей, функционирующей в соответствии с предлагаемым способом.
В зависимости от условий проводимых испытаний диапазон прироста вероятности правильной идентификации за счет применения предлагаемого способа составил 0≤ΔР≤20%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ прямой идентификации воздушных целей, в котором оценка идентификационного признака идентифицируемой воздушной цели формируется с учетом возможного обнаружения импульсов ответных сигналов других целей на временных позициях ее ответных сигналов, путем использования ожидаемых и характерных временных позиций, определяемых по всем целям, удовлетворяющим условию местонахождения в пространственном объеме неопределенности запросчика РСАО.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что формирование оценки идентификационного признака идентифицируемой воздушной цели с учетом возможного обнаружения импульсов ответных сигналов других целей на временных позициях ее ответных сигналов, путем использования ожидаемых и характерных временных позиций, определяемых по всем целям, удовлетворяющим условию местонахождения в пространственном объеме неопределенности запросчика РСАО, увеличивает вероятность правильной ее идентификации в условиях многоцелевой обстановки.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Реферат
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей. Достигаемым техническим результатом изобретения является повышение вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки. Сущность изобретения заключается в том, что формирование оценки идентификационного признака идентифицируемой воздушной цели осуществляется с учетом возможного обнаружения импульсов ответных сигналов других целей на временных позициях ее ответных сигналов путем использования ожидаемых и характерных временных позиций, определяемых по всем целям, удовлетворяющим условию местонахождения в пространственном объеме неопределенности запросчика радиолокационной системы с активным ответом.1 ил.
Формула




Комментарии