Наземная обзорная радиолокационная станция аэропорта и радиолокационная установка - RU2115141C1
Код документа: RU2115141C1
Чертежи



















Описание
Изобретение относится к технике, охватывающей радиолокационные станции обзора зоны, в частности, на земной поверхности и касается такой радиолокационной стации обзора, используемой в аэропортах, где необходимо вести наблюдение за летательными аппаратами, наземными транспортными средствами и вообще за объектами в зоне маневрирования аэропорта.
Известны обзорные радиолокационные станции панорамного типа, в которых используется равномерно вращающаяся антенна, совершающая круговое движение относительно вертикальной оси и облучающая в каждый данный момент узкую зону пространства в виде двугранного угла с вертикально расположенным ребром, то есть узкую зону по азимуту вокруг антенны. Это позволяет определить азимут обнаруженных летательных аппаратов, причем определяется также и радиальная дальность до этих летательных аппаратов, что в совокупности позволяет определить горизонтальное положение данного летательного аппарата. При этом изображения летательных аппаратов визуализируются на круглом экране индикатора типа телевизионного экрана в виде светящихся точек, местоположение которых соответствует горизонтальному положению летательных аппаратов.
Известны также радиолокационные станции обзора воздушного пространства, в которых для анализа пространства по углу места дополнительно используется мозаичная антенна с множеством фазосдвигающих устройств, в которых мгновенно и по произвольному закону управляют сдвигом фазы для того, чтобы мгновенно изменять направление излучения.
Недостатком двух этих типов радиолокационных станций с механически движущимися антеннами является, в частности, непроизводительное расходование энергии излучения, посылаемой в не являющихся важными и требующими контроля направлениях.
Кроме того, такие радиолокационные станции весьма дороги в эксплуатации, что ограничивает их применение лишь на наиболее крупных аэропортах.
Изобретение предлагает способ решения этих упомянутых выше проблем.
В основу изобретения легла задача создания наземной обзорной радиолокационной станции для аэропорта с неподвижной антенной, отличающейся относительной простотой и умеренной стоимостью эксплуатации и благодаря выполнению основных образующих элементов по модульному принципу позволяющей охватить широкий диапазон аэропортов различного масштаба от самых крупных до аэропортов местного значения.
Изобретение основывается на обзорной радиолокационной станции для зоны поверхности земли, в частности зоны аэропорта, предназначенной для размещения в соответствии с предварительно выполненной геометрической увязкой с данной контролируемой зоной.
В
соответствии с общим определением изобретения такая обзорная радиолокационная станция содержит в соответствующей комбинации
по меньшей мере одну неподвижную антенну, представляющую собой
решетку излучающих элементов, выстроенных вертикальными колонками и связанных с системой фазосдвигающих элементов, причем все излучающие элементы различных вертикальных колонок подчиняются одному и
тому же закону изменения фазы, тогда как регулировка фазосдвигающих устройств может изменяться по соответствующей команде от одной вертикальной колонки к другой для обеспечения электронного
сканирования контролируемого пространства по азимуту в горизонтальной плоскости;
источник излучения, способный выдавать сверхвысокочастотный сигнал предварительно определенной мощности на по
меньшей мере одной предварительно определенной частоте;
средства сверхвысокочастотной передачи и приема, имеющие в своем составе
по меньшей мере один циркулятор, имеющий один вход,
связанный с источником СВЧ-излучения, один вход/выход, связанный с системой фазосдвигающих элементов, и один выход;
по меньшей мере один канал передачи, способный подать сигнал излучения к
системе фазосдвигающих элементов через вход циркулятора;
по меньшей мере один канал приема, способный передать высокочастотный сигнал, полученный от системы фазосдвигающих элементов через
выход циркулятора;
средства для подразделения канала приема на один сигнал суммы и по меньшей мере один сигнал разности;
первый и второй приемные элементы с изменением частоты,
получающие соответственно сигналы суммы и разности и выдающие выходные сигналы в цифровом коде;
средства обработки цифровых сигналов, поступающих от первого и второго приемных элементов,
предназначенные для радиолокационного обнаружения объектов в контролируемой зоне;
средства управления системой фазосдвигающих элементов.
В предпочтительном варианте упомянутый выше фазовый закон реализуется при помощи специальной конструкции вертикальных колонок излучающих элементов.
В соответствии с первым возможным способом практической реализации
изобретения каждая колонка излучающих элементов данной антенны связана с одним управляемым фазосдвигающим элементом, а средства приемопередачи на сверхвысокой частоте имеют в своем составе
m
распределителей прием/передача, которые подразделяют данную антенну на m групп из n колонок излучающих элементов, причем эти m соответствуют m группам фазосдвигающих элементов;
m
приемопередающих модулей, каждый из которых имеет вход/выход, соединенный с одним из распределителей прием/передача, один вход сигнала передачи и один выход приема;
средства для соединения
входов передачи упомянутых выше модулей приема/передачи с источником излучения;
средства для формирования сигнала суммы и по меньшей мере одного сигнала разности на основе сигналов с выходов
приема упомянутых m модулей приема-передачи.
В первом из рассматриваемых способов практической реализации изобретения каждый приемопередающий модуль содержит твердотельный усилитель мощности для передачи.
В соответствии с вторым возможным способом практической реализации устройства в соответствии с изобретением каждая колонка излучающих элементов антенны связана с
одним управляемым фазосдвигающим элементом, и средства сверхвысокочастотной передачи и приема содержат
два распределителя приема/передачи, которые подразделяют на антенну и фазосдвигающие
устройства на левую и правую половины;
средства для формирования сигнала суммы и по меньшей мере одного сигнала разности на основе двух входов/выходов простого характера двух распределителей;
циркулятор, вход/выход которого получает сигнал суммы, тогда как его вход соединен с источником излучения, а его выходной сигнал и сигнал разности подводятся соответственно к первому и
второму приемным элементам.
В указанном втором способе практической реализации устройства в соответствии с изобретением источник излучения содержит передатчик на генераторной лампе.
На практике обычно источник излучения содержит СВЧ-генератор, способный выдавать сигнал заданной частоты и с заданной шириной полосы, и синтезатор частоты, способный выдавать локальные сигналы, а также взаимодействовать с СВЧ-генератором для того, чтобы обеспечить возможность дискретной линейной модуляции частоты излучения последовательно импульс за импульсом, воздействуя последовательно на локальные сигналы, причем упомянутая линейная модуляция сохраняет соотношение фаз между различными частотами излучаемого сигнала.
В предпочтительном варианте практической реализации изобретения колонка излучающих элементов антенны образована волноводом с излучающими щелями, запитываемыми переходом волновод-коаксиальный кабель.
На практике упомянутые фазосдвигающие устройства представляют собой устройства типа обратного или взаимного фазосдвигающего устройства, управляемого сигналами в цифровой форме.
В соответствии с еще одной характеристикой изобретения каждый приемный элемент содержит по меньшей мере одно преобразование частоты, следующее за амплитудно-фазовой демодуляцией и цифровым кодированием, в виде сложных комплексных сигналов.
На практике для каждой наводки антенны цикл излучения или передачи содержит излучение каждой из различных частот и это многократно повторяется.
В предпочтительном варианте практической реализации устройства в соответствии с изобретением частоты излучения используются в порядке, отличном от точного порядка расположения их номинальных значений.
Упомянутый выше цикл в предпочтительном варианте повторяется для значения частоты, отличающегося от частоты повторения или повторяемости импульсов излучения.
В соответствии с еще одним аспектом изобретения средства обработки полученного сигнала представляют собой средства, действующие по принципу сжатия импульса по дальности при помощи одноимпульсного измерения отклонений по азимуту и доплеровской обработки по скорости.
В практическом применении средства обработки сигнала содержат средства осуществления преобразования Фурье для сжатия импульса и/или когерентного интегрирования.
Определенными преимуществами обладают средства, которые позволяют реализовать:
выявление и фильтрацию радиолокационных
контактов на основе полученных сигналов;
определение угловых отклонений;
уточнение параметров по скорости;
уточнение по дальности.
В предпочтительном варианте уточнение по скорости сопровождается устранением неоднозначности по скорости с использованием второй частоты повторения.
На практике электронное сканирование антенны радиолокационной станции в соответствии с изобретением адаптируется соответствующим образом в зависимости от выявляемых объектов и контролируемых зон земной поверхности, в частности зон маневрирования аэропорта.
В конкретном примере практической реализации устройства в соответствии с изобретением анализирующий пучок решетки излучающих элементов антенны радиолокационной станции имеет раскрытие по азимуту в оси порядка 1,5o при общем угле сканирования по азимуту порядка 150o с лепестком диаграммы направленности по углу места типа обратного квадратного косеканса.
Объектом изобретения является также радиолокационная станция, предназначенная для обзорного контроля некоторой зоны земной поверхности.
В соответствии с
общим определением такая радиолокационная станция содержит
по меньшей мере один радиолокатор описанного выше типа;
средства обработки информации, связанные со средствами обработки
сигнала и предназначенные для радиолокационного наблюдения за упомянутой выше зоной поверхности земли в функции выявления упомянутых выше объектов.
В предпочтительном варианте практической реализации радиолокационной станции в соответствии с изобретением по меньшей мере часть средств обработки сигнала распределена между несколькими радиолокаторами.
На фиг. 1
изображена схема радиолокационной станции с неподвижной антенной и распределенными твердотельными усилителями в соответствии с изобретением;
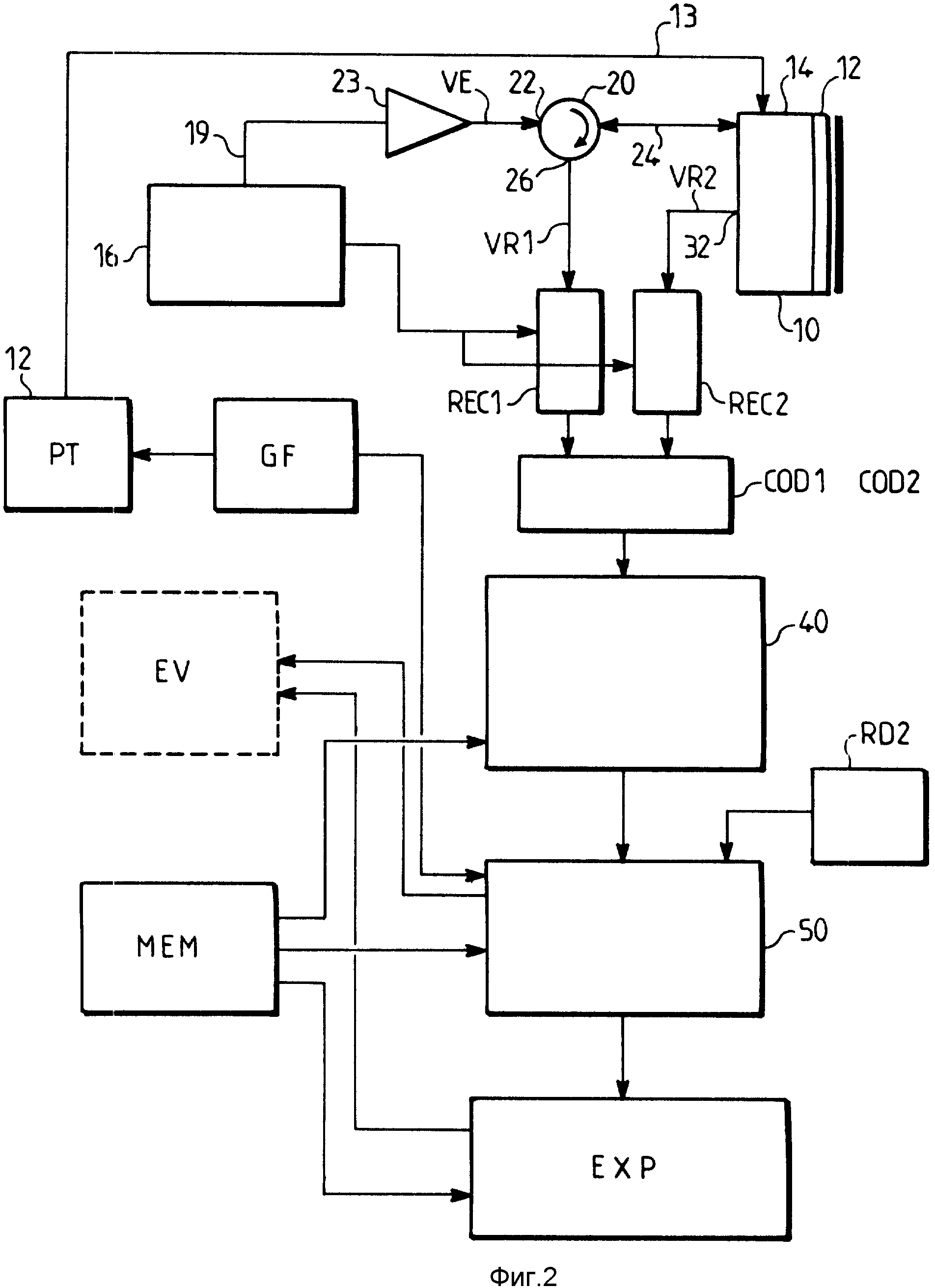
на фиг. 2 - схема радиолокационной станции,
показанная на фиг. 1;
на фиг. 3 - схема радиолокационной станции с неподвижной антенной и централизованным передатчиком в соответствии с изобретением;
на фиг. 4, 5 и 6
- соответственно укрупненная функциональная схема радиолокационной станции с неподвижной антенной в соответствии с изобретением, схема расположения указанной неподвижной антенны по отношению к
контролируемой зоне земной поверхности и способ размещения неподвижной антенны на здании или сооружении;
на фиг. 7 и 8 - соответственно укрупненная функциональная схема радиолокационной
установки с двумя неподвижными антеннами в соответствии с изобретением и схема расположения двух этих неподвижных антенн относительно контролируемого пространства;
на фиг. 9 - один из
возможных способов размещения на здании или сооружении трех неподвижных антенн радиолокационной установки;
на фиг. 10a, b -две другие схемы расположения нескольких неподвижных
радиолокационных антенн в соответствии с изобретением;
на фиг. 11 - установка, содержащая основную радиолокационную станцию и одну дистанцированную радиолокационную станцию в соответствии с
изобретением;
на фиг. 12 - схема пространственного расположения основной и дистанцированной радиолокационных станций, соответствующих установке на фиг.11;
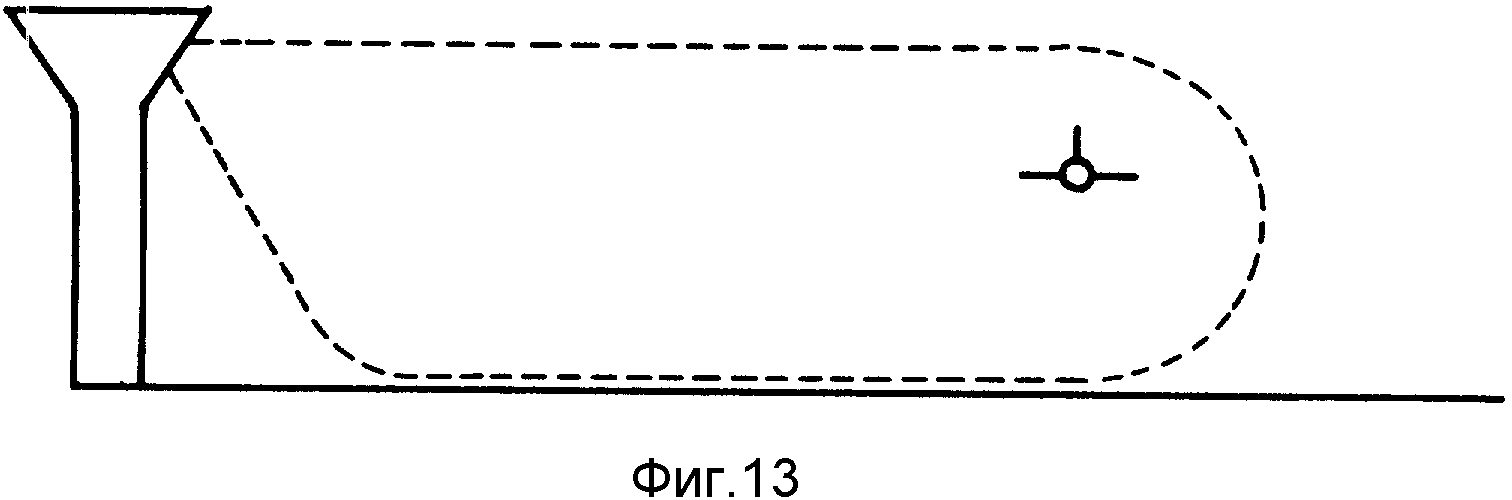
на фиг. 13 - диаграмма
обзора по углу места радиолокационной станции в соответствии с изобретением;
на фиг. 14 - перспективный вид спереди неподвижной радиолокационной антенны в соответствии с изобретением;
на фиг. 15 - перспективный вид части неподвижной радиолокационной антенны, целиком изображенной на фиг. 14, демонстрирующий конструктивное решение подключения кабелей питания антенны;
на
фиг. 16 - фрагмент фиг. 15 в увеличенном масштабе;
на фиг. 17 - излучающая панель неподвижной радиолокационной антенны в соответствии с изобретением, показанной на фиг. 15, вид сзади;
на фиг. 18 и 19 - диаграммы обзора по азимуту, полученные с помощью радиолокационной станции в соответствии с изобретением;
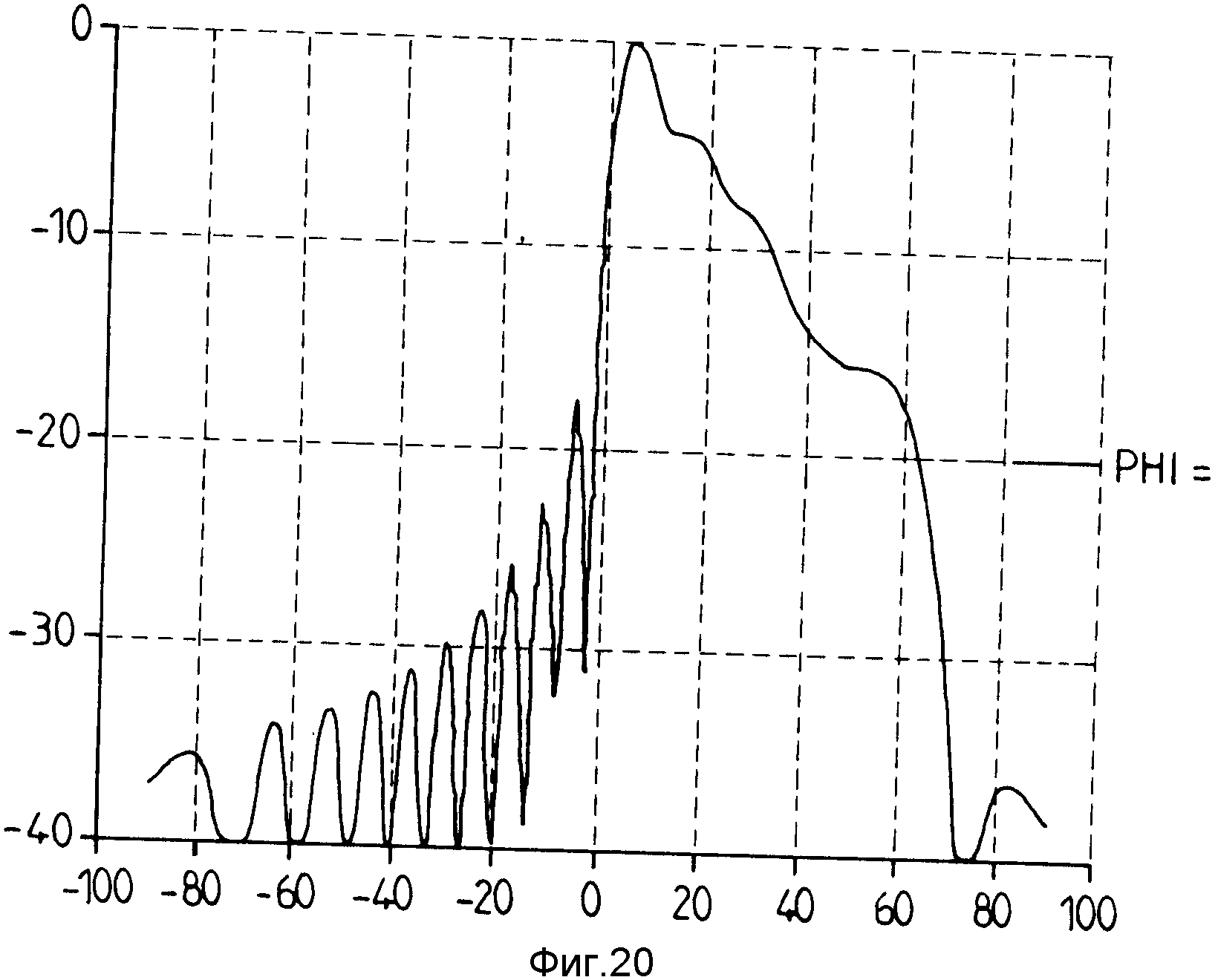
на фиг. 20 и 21 - диаграммы обзора по углу места, полученные с
помощью радиолокационной станции в соответствии с изобретением;
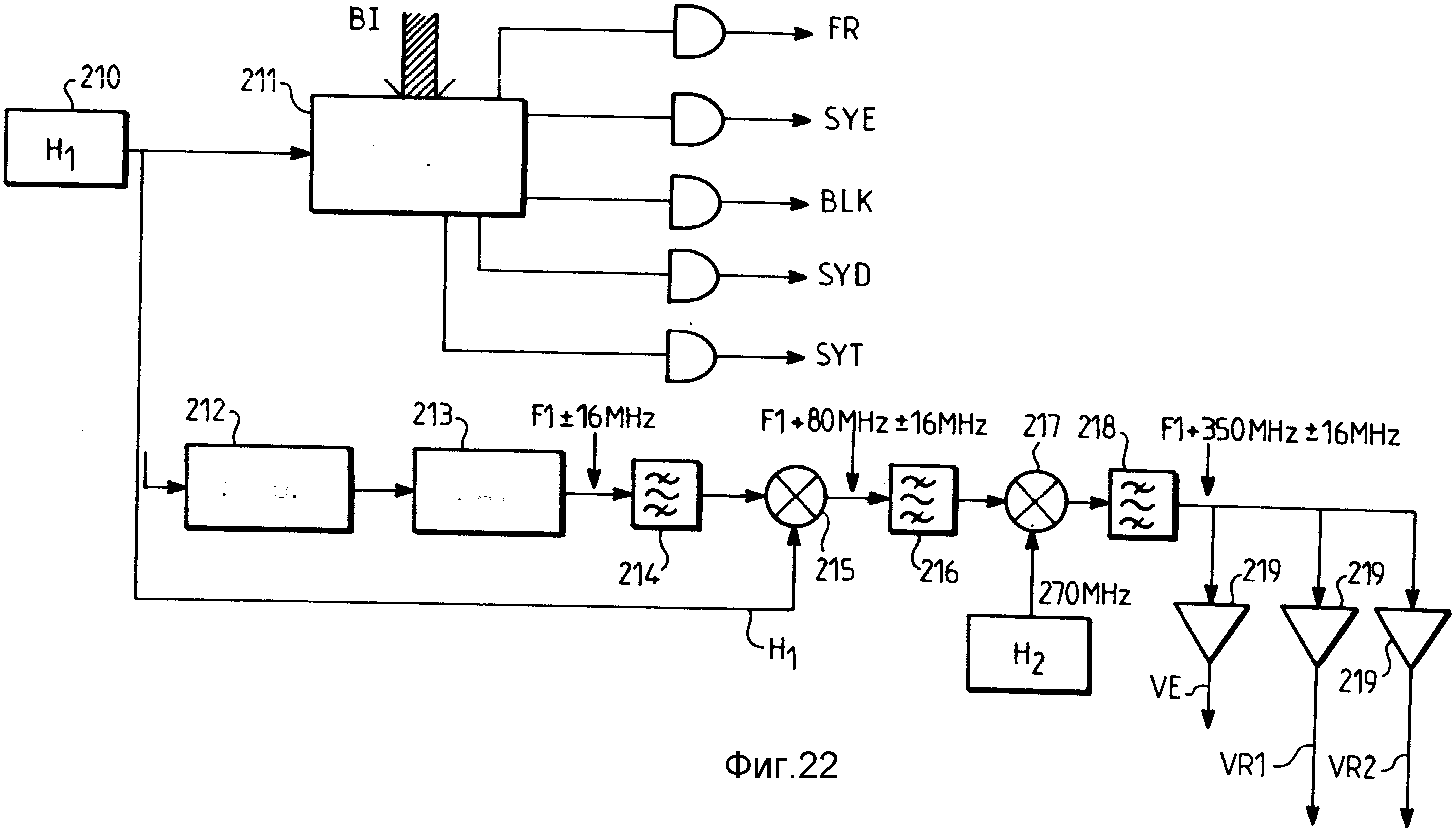
на фиг. 22 - функциональная схема средств синтезирования частот в соответствии с изобретением;
на фиг. 23 - схема
источника передачи в соответствии с изобретением;
на фиг. 24 - схема лампы бегущей волны, используемой в качестве централизованного передатчика в соответствии с одним из возможных вариантов
практической реализации изобретения;
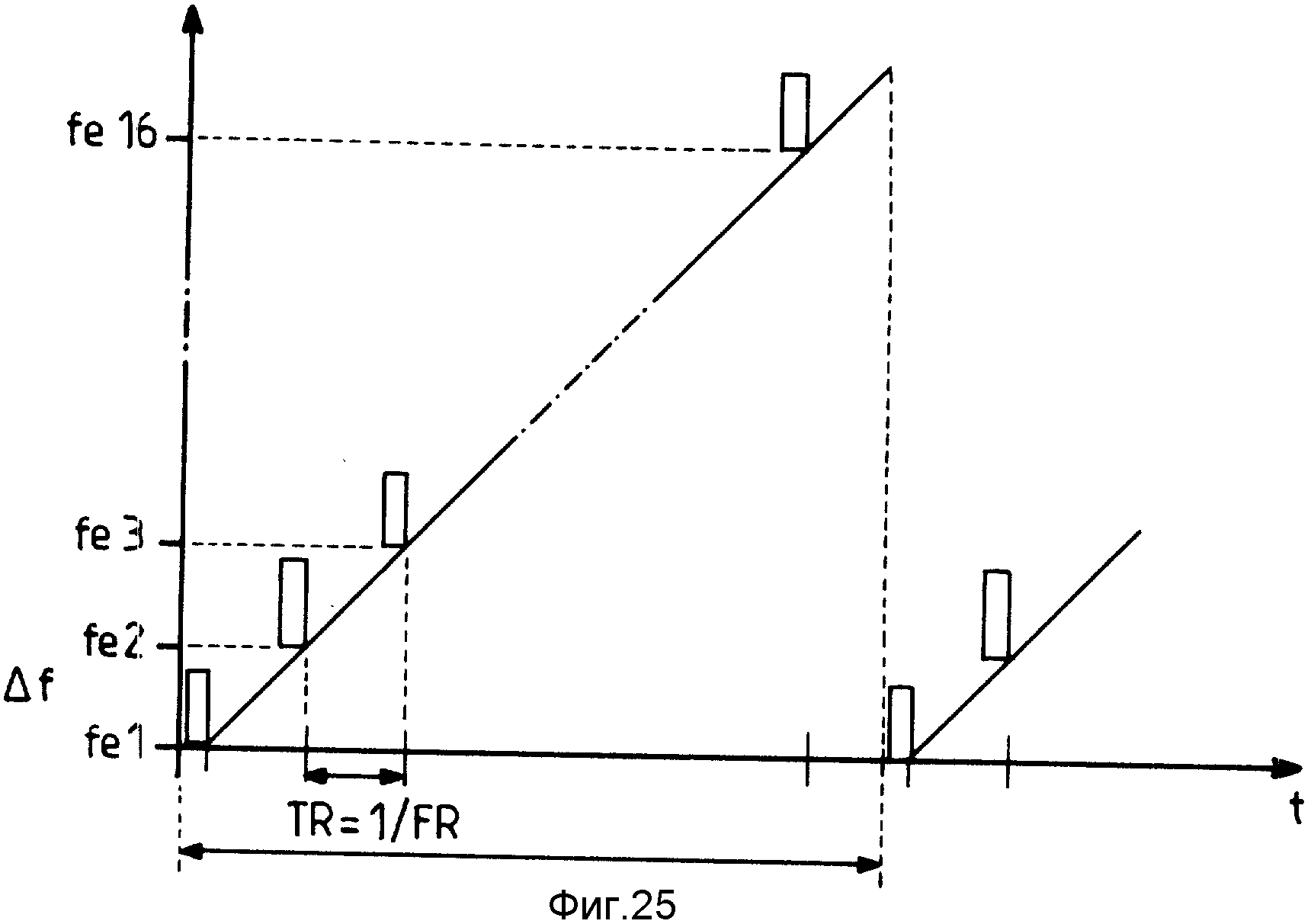
на фиг. 25 - диаграмма, иллюстрирующая линейную модуляцию частоты в соответствии с изобретением;
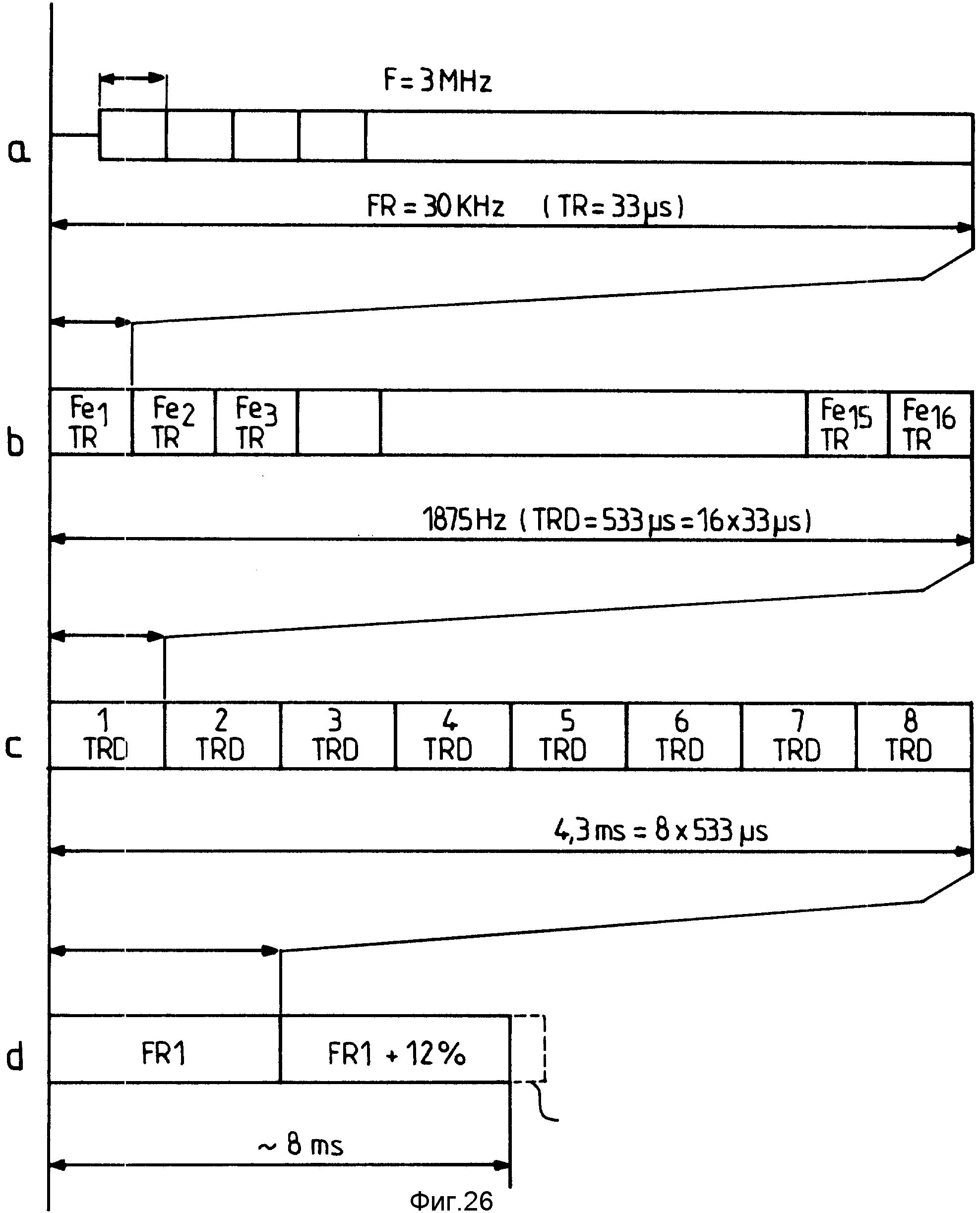
на фиг. 26, a, b, c, d - временные диаграммы,
иллюстрирующие цикл передачи;
на фиг. 27 и 28 - схема обработки информации от радиолокатора и обработки принятого радиолокационного сигнала для выдачи информации в соответствии с изобретением;
на фиг. 29 и 30 - в различных вариантах изменение частоты, демодуляция и кодирование сигнала в приемном элементе;
на фиг. 31 - схема твердотельного модуля приемопередатчика
радиолокационной станции в соответствии с изобретением.
Приведенные в приложении к данному описанию фиг.1 - 31 в основном носят вполне определенный характер. Вследствие этого они представляют собой неотъемлемую часть приведенного ниже описания. Таким образом, они могут служить не только для лучшего понимания содержания этого описания, но также и способствовать в случае необходимости более точному определению изобретения.
В общем случае обзорная радиолокационная станция контроля за земной поверхностью обеспечивает наблюдение за передвижениями в зоне контролируемого участка земной поверхности и управление этими перемещениями. В случае использования такой радиолокационной станции в условиях аэропорта зоной контроля является обычно зона маневрирования летательных аппаратов и других транспортных средств в этом аэропорту.
Радиолокационная станция в соответствии с изобретением, схематично представленная в различных аспектах на фиг. 1, 2 и 3, имеет в своем составе неподвижную антенну 10, представляющую собой достаточно плотную решетку излучающих элементов, сгруппированных в вертикальные колонки и соединенных с системой фазосдвигающих элементов 14. Излучающие элементы каждой из вертикальных колонок в полном составе подчиняются одному и тому же закону изменения фазы. Регулировка фазосдвигающих устройств может быть модифицирована по команде со стороны при переходе от одной вертикальной колонки излучающих элементов антенны к другой. Это необходимо для того, чтобы обеспечить электронное сканирование контролируемого пространства при помощи данного радиолокатора по азимуту в горизонтальной плоскости.
То обстоятельство, что найдена возможность построить данный тип радиолокационной
станции с использованием неподвижной антенной решетки, обеспечивает многочисленные преимущества по сравнению с известными до настоящего времени большими радиолокационными антеннами с механическим
сканированием. Эти преимущества кратко можно сформулировать следующим образом:
- использование неподвижной антенны позволяет отказаться от механических систем, обеспечивающих вращение антенны,
необходимое для осуществления механического сканирования. Это обстоятельство повышает общую надежность и снижает стоимость эксплуатации радиолокационной станции (позволяет исключить, например,
подвижные вращающиеся соединения);
антенная решетка имеет еще и то преимущество, что для нее свойственно относительно медленное и достаточно длительное и постепенное, хотя и неизбежное,
ухудшение характеристик с течением времени, что позволяет успешно разрешить определенную часть проблем готовности к эксплуатации как функции времени, а также в определенной степени решить проблемы
технического обслуживания радиолокационной станции;
радиолокационная станция с неподвижной антенной представляет собой оборудование, которое несравненно проще установить на любом здании или
сооружении.
На практике упомянутый выше единый для всех элементов излучения одной и той же колонки антенной решетки радиолокационной антенны закон изменения фазы реализуется путем специального конструктивного решения вертикальных колонок излучающих элементов, как будет более подробно описано ниже со ссылками на фиг. 1 - 31.
Каждая вертикальная колонка излучающих элементов 10A1-10A16 неподвижной антенны радиолокационной станции в соответствии с изобретением соединена с одним управляемым фазосдвигающим элементом 14A1-14A16 (вместо использования индивидуального фазосдвигающего элемента на каждый излучающий элемент антенной решетки).
Передаваемый на излучение в пространство сверхвысокочастотный сигнал 19 генерируется передатчиком GEN, имеющим возможность выдавать СВЧ-сигнал HF заданной мощности, составляющей порядка 100 Вт, на по меньшей мере одной заданной частоте, которая может располагаться в полосе X (диапазон рентгеновского излучения) или в полосе KU.
Изобретение предлагает две структуры сверхвысокочастотных средств приема/передачи (HFA представлена на фиг. 1 или HFB представлена на фиг. 3).
В обоих
случаях упомянутые выше структуры содержат следующие функциональные элементы (фиг. 2):
по меньшей мере один циркулятор 20, имеющий вход 22 для передачи, вход/выход 24, соединенный с системой
фазосдвигающих элементов 14 и выходом 26;
по меньшей мере один канал передачи VE, который обеспечивает подачу сигнала передачи HF на вход 22 циркулятора;
по меньшей мере один канал
приема VR или VR1 (сумма), который подает сигнал высокой частоты, приходящий из системы фазосдвигающих элементов 14 и проходящий через вход/выход 24 и выход 26 циркулятора;
по меньшей мере
один другой канал приема VR2 (разность), который не проходит через циркулятор;
первый и второй средства с изменением частоты REC1 и REC2, получающие соответственно сигналы суммы и разности и
выдающие выходные сигналы в цифровом коде;
средства обработки 40 сигналов в цифровой форме, поступающих из первого и второго приемных элементов REC1 и REC2, предназначенные для обеспечения
радиолокационного выявления объектов в контролируемой зоне;
средства управления 12, предназначенные для упорядочения работы системы фазосдвигающих устройств 14.
В
предпочтительном варианте выполнения изобретения, представленном схематически на фиг. 1, приемопередающие средства, работающие на сверхвысокой частоте (HFA), имеют в своем составе
распределители приема/передачи в количестве m единиц (при этом количество упомянутых распределителей может составлять, например, m=6), которые подразделяют неподвижную антенную решетку радиолокатора в
соответствии с изобретением на m групп, в каждой из которых содержится по n вертикальных колонок излучающих элементов (число вертикальных колонок излучающих элементов в одной группе может составлять,
например, n = 16), обозначенных на фиг. 1 позициями 10A-10F, причем числу этих групп излучающих элементов, выстроенных в вертикальные колонки, соответствует такое же число m групп упомянутых выше
фазосдвигающих элементов, обозначенных на фиг. 1 позициями 14A-14F;
каждый из модулей, имеющих вход/выход, в количестве m единиц имеет связь с одним из распределителей приема/передачи, одним
входом передаваемого сигнала и одним выходом приема;
средства 25 для связи входов передачи упомянутых выше m модулей приема-передачи с упомянутым выше передатчиком GEN;
специальные
средства для формирования сигнала суммы VRI и по меньшей мере одного сигнала разности VR2 на основе выходных сигналов приема m модулей приема/передачи (позиции 28G, 28D и 29 на фиг. 1).
В рассматриваемом варианте практической реализации изобретения каждый модуль приема-передачи содержит твердотельный усилитель мощности, каждый из которых может обладать собственной мощностью, составляющей, например, 16 Вт.
В другом варианте практической реализации радиолокационной станции в соответствии с изобретением, представленным на фиг. 3, приемопередающие средства,
работающие на сверхвысокой частоте HFB, содержат
два распределителя приема/передачи 15L и 15R, которые подразделяют антенную решетку радиолокационной антенны устройства в соответствии с
изобретением и систему фазосдвигающих устройств на левую и правую половины;
специальные средства 29 для формирования сигнала суммы VRI и по меньшей мере одного сигнала разности VR2 на основе
двух входов/выходов простейшего характера этих двух распределителей;
циркулятор 20, совмещенный вход/выход которого принимает сигнал суммы, тогда как его вход связан с передатчиком, и его
выход, а также сигнал разности, подаются соответственно на первый и второй приемные элементы.
В этом втором способе практической реализации устройства в соответствии с изобретением ламповый излучатель мощности встроен в источник передачи (излучения).
В общем виде источник передачи GEN содержит СВЧ-генератор 16, работающий на одной заданной частоте и одной заданной ширине полосы. К этому генератору добавляется синтезатор частоты 21, способный выдавать локальные сигналы. В предпочтительном варианте синтезатор взаимодействует также с СВЧ-генератором для того, чтобы обеспечить возможность дискретной линейной модуляции частоты излучения от одного импульса к другому, что более подробно будет описано в последующих разделах описания, и воздействует вследствие этого на локальные сигналы. Таким образом, упомянутая выше линейная модуляция может быть обеспечена при сохранении фазового соотношения между различными частотами излучения.
Как видно на фиг. 2, управление GF наводкой луча PT адресует запоминающее устройство направлений наводки, заданных заранее или рассчитанных снова, причем структура этого запоминающего устройства позволяет обеспечить управления фазосдвигающими элементами 14 неподвижной антенны 10. Управление наводкой луча основано, в частности, на информации географического запоминающего устройства МЕМ. В случае применения радиолокационного устройства в соответствии с изобретением для обзора и контроля наземной зоны маневрирования аэропорта предусматривается использование специальных средств эксплуатации EXP обработанной таким образом информации.
Как видно на фиг. 4, 5 и 6, неподвижная антенна 10 и приемопередающие модули 17 размещены в блоке ЕЕ, располагающемся снаружи, например на крыше башки командно-диспетчерского пункта TR данного аэропорта (фиг. 6), в соответствии с заданными геометрическими соотношениями, касающимися фактического расположения площадки маневрирования данного аэропорта. На фиг. 5 видно, что радиолокационная установка RD с одной неподвижной антенной 10 обеспечивает перекрытие угла А, имеющего величину порядка 150o, по азимуту.
Генераторные средства GEN, а также средства обработки сигнала 40 и информации 50 размещены во внутреннем блоке или стойке обработки BT. В случае необходимости радиолокационная установка может иметь в своем составе, кроме того, отдельную систему визуализации EV.
Конфигурация радиолокационной установки в соответствии с изобретением, содержащая три основных блока EE, BT и в случае необходимости EV, находит предпочтительное применение для аэропортов, оборудованных лишь одной взлетно-посадочной полосой и соответствующей системой рулежных дорожек.
На фиг. 7, 8 и 9 радиолокационная установка в соответствии с изобретением содержит две или три неподвижных антенны 10-1, 10-2 и 10-3, каждая из которых связана со своей наружной системой EE1, EE2 и EE3, и одну общую стойку обработки BT. Такая конфигурация, включающая пять блоков EE1, EE2, EE3, BT и в случае необходимости EV, находит применение преимущественно для аэропортов, оборудованных по меньшей мере двумя перекрещивающимися взлетно-посадочными полосами PT1 и PT2.
Как видно на фиг. 10, a, b, многочисленные антенны позволяют обеспечить перекрытие по азимуту значительно большего угла, достигающего, например, 300o при использовании двух неподвижных антенн 10-1 и 10-2 или составляющего все 360o при использовании трех таких антенн 10-1, 10-2 и 10-3.
В то же время (фиг. 11 и 12) для аэропортов больших размеров, располагающих, например, двумя взлетно-посадочными полосами PT1 и PT2, идущими параллельно, и третьей взлетно-посадочной полосой PT3, перпендикулярной первым двум, следует использовать основную радиолокационную станцию RD1, содержащую блоки EE1, BT и EV, упомянутые выше (фиг. 3), и, кроме того, отнесенную или дистанцированную радиолокационную станцию RD2, имеющую в своем составе систему предварительной обработки EP, соединенную с общей стойкой обработки BT и предназначенную для передачи на эту стойку данных, получаемых от наружной системы EE2. При этом по меньшей мере часть обработки сигнала удаленной радиолокационной станции сосредоточена в общей стойке BT.
Разумеется, основная радиолокационная станция RD1 и периферийная радиолокационная станция RD2 могут в случае необходимости содержать несколько неподвижных антенн.
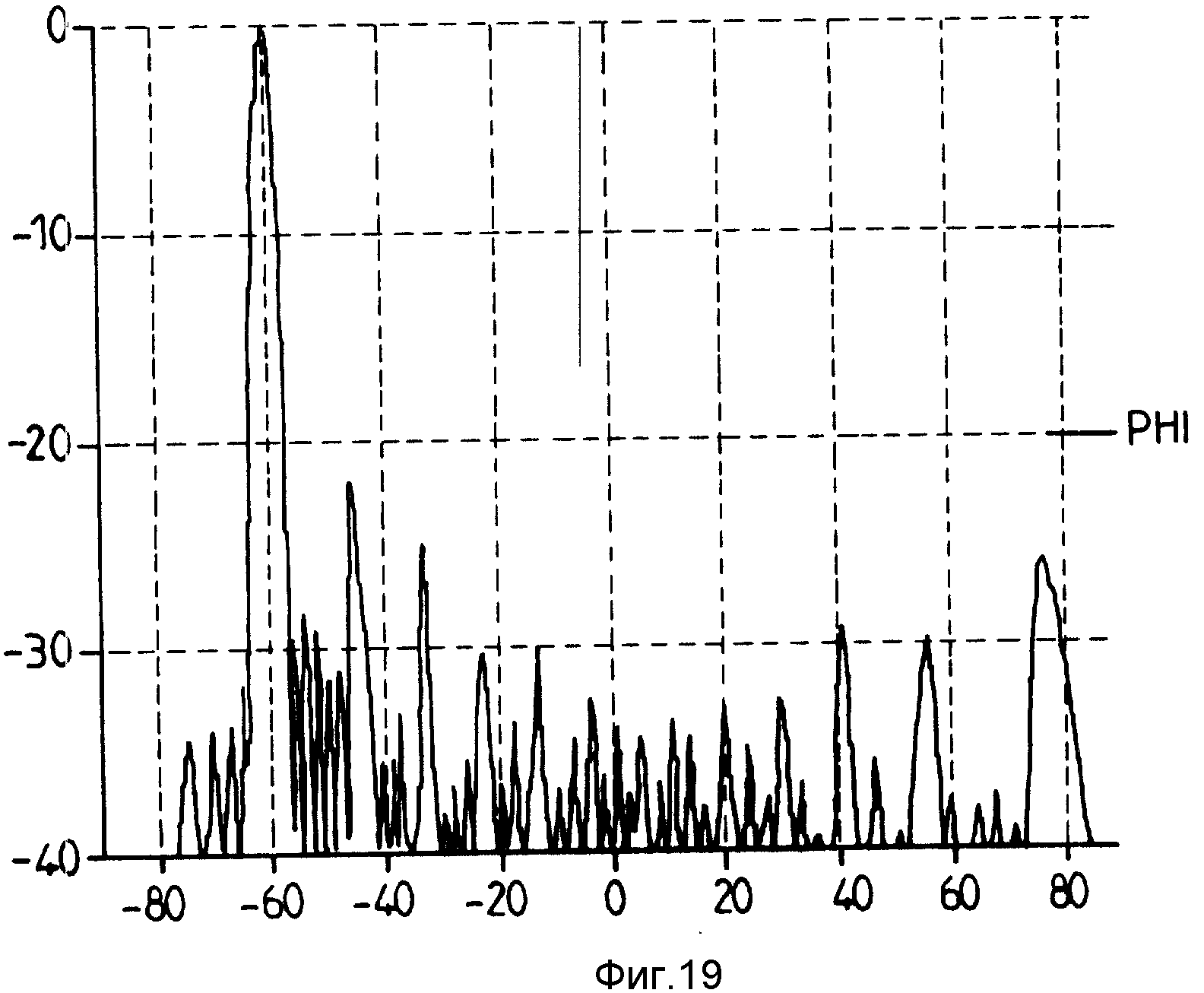
Диаграмма коэффициента направленности предлагаемой антенны характеризуется пиком, имеющим раскрытие порядка 1,5o, по азимуту в оси (при 0o, фиг. 18) и порядка 3o для отклонения от линии визирования на 60o (фиг. 19).
Диаграмма направленности по углу места представляет собой лепесток типа обратного квадратного косеканса, то есть касательный к горизонтальной плоскости, что позволяет обеспечить выявление летательных аппаратов в воздухе (фиг. 13, 20 и 21).
Коэффициент усиления данной антенны составляет примерно 30 дБ при обнаружении объектов с площадью эквивалентной радиолокационной поверхности в 1 м2.
Уровень вторичных лепестков позволяет исключить обнаружение препятствий с большой эквивалентной радиолокационной поверхностью (SER) по азимуту и облаков по положительному углу места. Уровень первых вторичных или побочных лепестков составляет примерно -25 дБ по отношению к главному лепестку по азимуту и -20 дБ по углу места.
Геометрические размеры предлагаемой неподвижной антенны составляют примерно 1,5 м х 0,6 м. На фиг. 14 показана неподвижная антенна 10, оборудованная своим собственным радиопрозрачным обтекателем RAD. Речь идет о плоской прямоугольной излучающей поверхности, образованной, например, 96 излучающими элементами типа целевых волноводов.
Как видно из фиг. 15, каждый волновод запитывается со своего нижнего конца 11 при помощи соединительного элемента 9 типа коаксиального кабеля, за исключением оконечного волновода 10 - 0, который не запитывается. Переходное устройство от волновода к продольному кабелю 9B запитывает каждую колонку (фиг. 16) кроме крайних.
Каждый запитанный волновод функционирует в резонансном режиме. Излучаемая мощность отбирается через равномерные интервалы при помощи щелей, вырезанных на малой стороне волновода, для обеспечения требуемого закона изменения фазы.
На фиг. 17 показано как распределители 15, описанные со ссылками на фиг. 1, располагаются на задней стороне излучающей поверхности и разделены на шесть подсистем по 16 волноводов в каждой. Каждый волновод имеет свой собственный управляемый фазосдвигающий элемент 14. Каждый модуль, обозначенный на фиг. 17 позициями от 17A до 17F, связан с одной из шести упомянутых выше подсистем.
По симметричной схеме блок DIR обеспечивает первый и второй каналы приема VR1 и VR2 (принимаемый СВЧ-сигнал).
Плоский радиопрозрачный обтекатель RAD с малыми потерями выполнен, например, по типу "сэндвич" и образован четвертьволновым слоем вспененного диэлектрического материала, помещенного между двумя тонкими стеклообразными слоями смолы. Упомянутый радиопрозрачный обтекатель удерживается на расстоянии в несколько сантиметров от излучающей панели с таким расчетом, чтобы его присутствие не вносило непосредственно искажений в радиоэлектронные характеристики излучающих элементов.
Для поддержания приемлемой температуры внутри образованного таким образом замкнутого пространства достаточно обычного кондиционера, обеспечивающего циркуляцию воздуха внутри антенны. В некоторых случаях может быть использована специальная противообледенительная система для обтекателя антенны, не показанная на приведенных в фигурах.
Агрегат, представляющий собой неподвижную антенну в сборе в соответствии с изобретением, закрепляется на механической опорной конструкции.
Предлагаемая антенна спроектирована таким образом, чтобы обеспечивать диаграмму направленности типа квадратного косеканса в плоскости угла места и типа узкого луча, ориентируемого электронным образом в диапазоне ± 75o, в азимутальной плоскости.
Делитель излучения 25 может представлять собой делитель низкого уровня, построенный по трехпластинной технологии и образованный одним гибридным каскадом, обеспечивающим хорошее распределение первоначальной мощности между шестью группами, каждая из которых состоит из 16 излучающих волноводов.
Распределитель 15 образован отрезком излучающего волновода, запитанного в центре при помощи перекрещивающихся соединительных элементов. Излучаемая мощность отбирается при помощи электрических зондов переменной глубины. Такой распределитель 15 имеет преимущество, заключающееся в относительно малых потерях.
Разумеется, в конструкции предлагаемой антенны могут быть использованы и другие типы распределителей, фазосдвигающих элементов и излучающих элементов.
В том, что касается приемного сумматора DIR, речь идет о распределителе того же типа, что и делитель передачи 15. Он образован двумя сумматорами коэффициента 3, связанными с двумя боковыми ветвями гибридного соединения ("магическое Т"), выдающими сигналы суммы VR1 и VR2.
Предусмотрено использование линий связи из гибких или полужестких коаксиальных кабелей. Хотя электронные фазосдвигающие устройства 14 могут быть использованы для восполнения погрешностей дифференциальных фаз между каналами, представляется желательным, чтобы кабели одного типа имели одну и ту же электрическую длину с тем, чтобы упростить операции калибровки при изготовлении данной антенны. Представляется также желательным обеспечить синфазное распределение на входе фазосдвигающих элементов по половине LSB (младший бит) этих элементов.
Вид диаграммы направленности в плоскости угла места (фиг. 13) зависит от закона облучения (L1 в приложении), выстроенного вдоль каждого волновода его излучающими щелями. В формуле L1 y представляет собой ординату вдоль колонки излучающих элементов, A является параметром амплитуды и Ф представляет собой фазу.
Во внутренней полости волновода возбуждается стационарная волна. Все излучающие щели локализованы на полудлинах волны, на максимумах напряженности внутреннего электрического поля.
Геометрические характеристики, приданные каждой излучающей щели (наклон по отношению к оси волновода, собственная длина), сообщают этой излучающей щели специальные характеристики переноса по амплитуде и по фазе изнутри волновода наружу, позволяя таким образом, представить желаемый закон излучения, заданный формулой L2, приведенной в приложении, где f представляет собой индекс или показатель данной щели, Ei обозначает напряженность электрического поля внутри волновода и T(f) является функцией переноса данной щели, тогда как Er(f) обозначает электромагнитное поле, излученное данной щелью.
Образование узкого луча по амплитуде обеспечивается путем наложения на упомянутый выше закон L2 классического закона облучения при одинаковой фазе и уравновешенной амплитуде. Такое формирование узкого луча обеспечивается, например, делителем в цепи передачи 25 и шестью распределителями 15 волноводов, расположенными на задней стороне данной антенны.
И наконец, ориентация радиолокационного луча в азимутальной плоскости обеспечивается путем наложения на упомянутые выше законы еще одного закона линейно изменяющейся фазы, заданного формулой L3, также приведенной в приложении, где x представляет собой абсциссу вдоль данной антенны, θ представляет собой желаемый угол отклонения и K представляет собой некоторый параметр, который специалист в данной области техники может определить.
Этот закон изменения фазы L3 реализуется при помощи 96 фазосдвигающих элементов, располагающихся на входах 96 излучающих элементов.
Дуплексирование приема/передачи осуществляется в шести модулях приема/передачи, описанных выше со ссылками на фиг. 1 и 2.
Частота функционирования радиолокационной антенны в предпочтительном варианте располагается в диапазоне X (рентгеновский диапазон) с изменениями в диапазоне ± 75 МГц относительно выбранной центральной частоты.
Коэффициент усиления антенны составляет примерно 30 дБ при нулевом отклонении от линии визирования за радиопрозрачным обтекателем и превышает 26 дБ при отклонении от линии визирования на величину ± 60o также вне от обтекателя. Потери на радиопрозрачном обтекателе RAD составляют менее 1 дБ.
На фиг. 18 и 19 представлена диаграмма направленности антенны в азимутальной плоскости при нулевом отклонении от линии визирования (фиг. 18) и при отклонении от линии визирования на 60o (фиг. 19).
Отклонение в азимутальной плоскости в предпочтительном варианте выполнения управляется фазосдвигающими устройствами на 4 бита. Подъем вторичных лепестков диаграммы направленности при отклонении от линии визирования связан главным образом с квантованием фазы, которое приводит к ухудшению характеристик на линейных системах.
На фиг. 20 представлена диаграмма направленности в плоскости угла места, а на фиг. 21 представлен частичный вид этой же диаграммы в увеличенном масштабе.
Как видно на фиг. 22, совокупность элементов, образующих синтезатор частоты, сгруппирована на плате, структурная схема которой имеет в своем
составе:
базовый тактовый генератор 210 или H1, работающий на частоте 80 МГц;
программируемый делитель DIVP или 211, который выдает синхронные сигналы частоты
повторяемости FR, сигнал синхронизации передачи SYE, сигнал управления бланкингом приемников BLK, сигнал синхронизации обработки SYT и сигнал синхронизации фазосдвигающего устройства SYD.
Программируемый делитель частоты DIVP управляется при помощи центрального вычислителя (не представленного на фиг. 22) через внутреннюю шину BI.
Элементы, образующие синтезирующие частоту средства, выполнены на общедоступных интегральных схемах.
Например, речь идет об элементе 212 или NCO типа STEL, продаваемом под индексом 1176 фирмой ФРИКАНСИ СИНТЕЗАЙС ПРОДАКТ. Выходной сигнал этого элемента подается на аналого-цифровой преобразователь 213 или DAC типа AD9712B, продаваемый фирмой АНАЛОГ ДИВАЙС. Выходной сигнал этого элемента представляет собой FI±16 МГц. После фильтрации в блоке 214 смешивания в блоке 215 с частотой тактового генератора H1 получают частоту FI±16 МГц+80 МГц. Новая фильтрация в блоке 216 предшествует смешиванию в блоке 217 с тактовой частотой H2, составляющей 270 МГц, после чего происходит еще одна последняя фильтрация в блоке 218, на выходе которого получается сигнал FI±16 МГц+350 МГц. Три выхода 219 выдают эту частоту в качестве частоты когерентной демодуляции в два канала приема и, соответственно, как модуляцию источника СВЧ-излучения 16 (фиг. 1).
Указанный цифровой синтезатор частоты выдает с частотой тактового генератора H1 выборки синусоидального сигнала с разрешением 12 бит.
Такой синтезатор частоты позволяет выдавать необходимые сигналы с большой точностью по частоте, составляющей единицы герц, и со спектральной частотой порядка -80 дБ на герц в диапазоне от 0 до 32 МГц.
Средства синтезирования частоты выполнены таким образом, чтобы иметь возможность выдавать 16 частот передачи при сохранении синхронности по фазе. Они выдают также сигналы демодуляции на промежуточной частоте.
Частота сигналов управляется при помощи центрального вычислителя через внутреннюю шину BI и цифровой интерфейс (на фиг. 22 не представлены).
Сигналы, поступающие из блока DAC, представляет собой последовательности из 16 частот с шагом в 2 МГц, причем каждая из этих частот располагается в полосе F1±16 МГц.
Частота F1 изменяется с доплеровским периодом фильтрации, в течение которого частота повторяемости FR остается постоянной. Когда частота повторяемости FR изменяется, предусмотрено уточнение частоты F1 с тем, чтобы промежуточная частота FI оставалась целым кратным по отношению к частоте FR. Это позволяет освободиться от некоторых паразитных сигналов.
Наконец, смесители или контура преобразования частоты реализованы путем двойного изменения частоты для того, чтобы быть связанными с аналоговыми фильтрующими устройствами в полосе 32 МГц.
Промежуточная частота F1 выбирается на уровне порядка 400 МГц для того, чтобы исключить помехи от эфирных УКВ-излучений.
Как видно из фиг. 23, источник СВЧ-излучения 16 вырабатывает когерентные сигналы передачи на основе единственного опорного генератора 160 или ORD в рентгеновском диапазоне (полоса X), регулируемого в пределах 50 МГц.
Делитель мощности 161 распределяет сигнал генератора в канал передачи и параллельно в два приемника RECI и RKC2 для демодуляции СВЧ-сигнала.
В канале передачи VE СВЧ-сигнал проходит через противовозвратное устройство 162 и смешивается в блоке 164 с сигналом промежуточной частоты F1±16 МГц, поступающим из синтезатора частоты. После прохождения через другое противовозвратное устройство 166 сигнал подвергается адаптированной фильтрации в блоке 167, где устраняется зеркальная частота и паразитные полосы за пределами используемого диапазона.
Наконец, усилитель 168 средней мощности доводит сигнал до уровня порядка 30 дБ (1 Вт).
Таким образом, формируется пилотный сигнал непосредственно в рентгеновском диапазоне частот на основе одного генератора с диэлектрическим резонансом, характеристики которого как по стабильности частоты, так и по спектральной частоте сигнала являются приемлемыми для рассматриваемого в данном случае практического применения.
В описываемом здесь способе практической реализации изобретения генератор сверхвысокочастотных колебаний с диэлектрическим резонатором имеет следующие основные характеристики и
параметры:
частота функционирования в рентгеновском диапазоне излучения (полоса X) c механической регулировкой частоты на ±25 МГц;
выходная мощность примерно от 20 дБм до 100
МВт;
максимальная точность частоты при любых условиях составляет порядка ±1 МГц;
уровень гармонических линий порядка -20 дБс;
уровень паразитных линий порядка -60 дБс;
шум по фазе в простой полосе на 10 кГц несущей частоты порядка -90 дБс на герц и на 100 кГц несущей частоты порядка -115 дБс на герц.
Некоторые технические решения могут быть рассмотрены на уровне передачи, принимая во внимание требования по надежности и по стоимости. Попытки обеспечить высокий уровень MTBF (среднее время наработки на отказ) на уровне передатчика приводят к поиску относительно малой пиковой мощности. Действительно, среднее время наработки на отказ для ламп малой мощности является более высоким при меньшем напряжении питания, что выражается в более высоком уровне надежности.
Принимая во внимание возможные обработки сигнала и необходимый уровень соотношения сигнал/шум пиковая мощность фиксируется на уровне примерно 100 Вт при обеспечении средней мощности в диапазоне от 1 до 2 Вт.
На этом уровне излучаемой мощности преимущество предлагаемой радиолокационной станции состоит в малой восприимчивости к помехам от других излучающих систем.
В соответствии с фиг. 1 усиление передаваемого или излучаемого сигнала выполнено на твердотельных элементах.
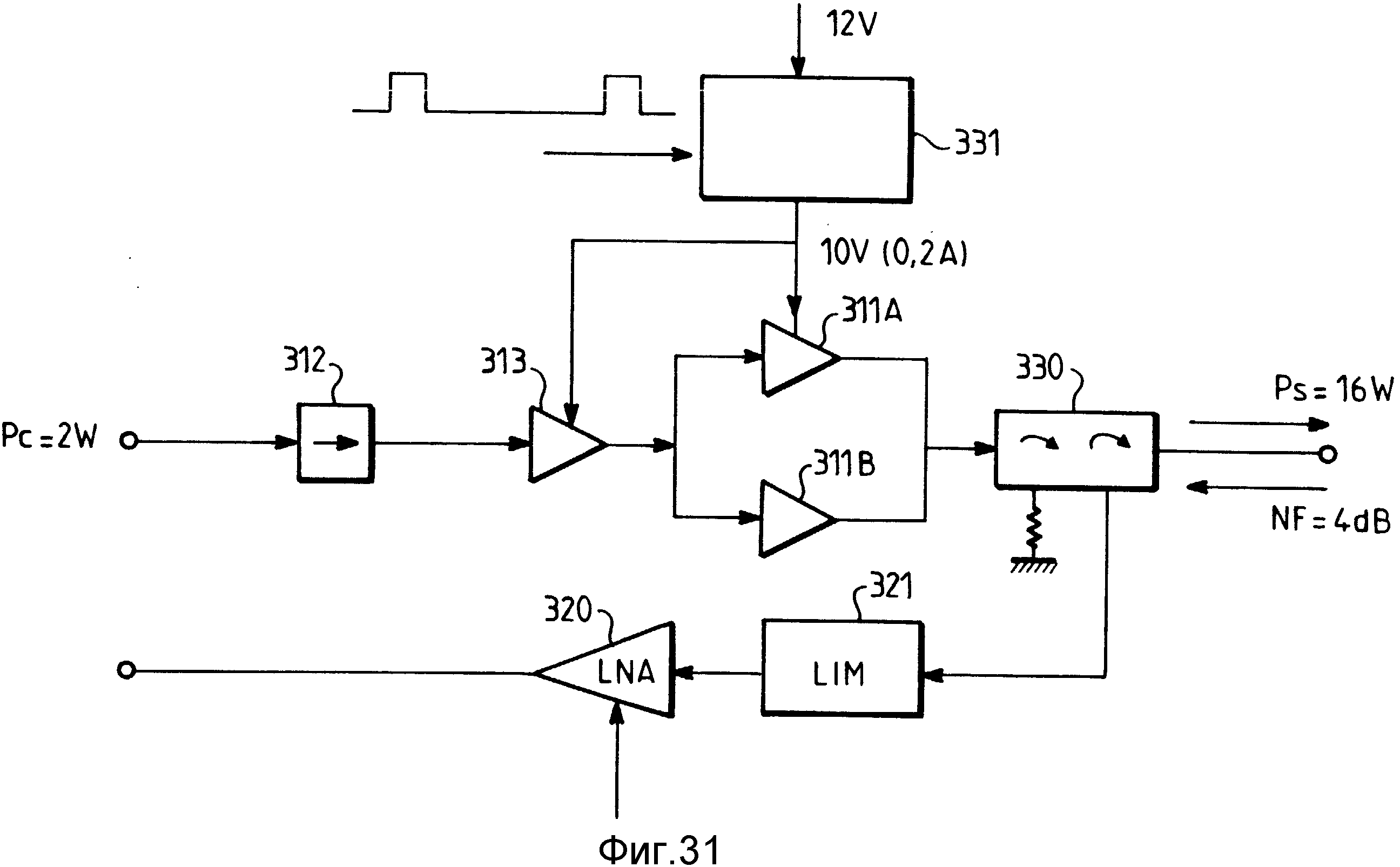
В этом случае (фиг. 31) каждый модуль содержит усилитель мощности в канале передачи 311A и 311B. Этот усилитель мощности получает сигнал мощностью порядка 3 дБ (2 Вт), подаваемый на его вход через противовозвратное устройство 312 и предварительный усилитель 313 (элементы 311, 312 и 313 представляет собой составные части блока 3, представленного на фиг. 1). На своем выходе усилитель выдает сигнал мощностью 12 дБ (16 Вт), проходящий через циркулятор 330 (обозначенный позицией 20 на фиг. 1). В данном усилителе мощности используются два каскада на транзисторах TEC из арсенида галлия. Последний каскад усиления требует параллельного включения двух транзисторов. Напряжение питания двух каскадов усиления модулировано импульсами 331 таким образом, чтобы уменьшить тепловое рассеяние транзисторов и повысить надежность всей системы.
Выход циркулятора соединен через ограничитель 321, предназначенный для защиты от паразитных сигналов высокого уровня и различного происхождения, с усилителем с малым уровнем шума 320 (на фиг. 1 обозначен позицией 5), отключенным во время передачи выходного сигнала.
Роль этого усилителя с малым уровнем собственного шума состоит в том, чтобы с учетом его коэффициента усиления и коэффициента собственного шума оптимизировать чувствительность по приему, делая пренебрежимо малым вклад потерь, которые вводятся позади него. Коэффициент шума, измеренный на входе модуля приема/передачи включая потери ограничителя и циркулятора, составляют примерно 4 дБ.
Как уже было сказано выше со ссылками на фиг. 3, модуль приема/передачи может быть рассмотрен в классе передатчиков на централизованной лампе типа бегущей волны (фиг. 24), магнетрона и т.д., либо в классе передатчиков на твердотельных элементах или передатчиков твердого состояния.
Как видно из фиг. 24, лампа бегущей волны T100 снабжена на своем входе блоком T101 с переменным коэффициентом усиления и обычными элементами питания T110-T114. Блок управления T120 и управления модуляцией воздействует на цепи питания сетки T111 и T112 и блок очень высокого напряжения T113. Предусмотрено использование специального тестового блока T125, соединенного с выходом лампы бегущей волны TOP.
В этом случае централизованный передатчик может использовать лампу бегущей волны, синхронизированный магнетрон или лампу, снабженную CFA, то есть Cross Field Amplifier.
В каждом из этих вариантов используется усилительная лампа того или иного типа, откуда возникают условия определенного времени предварительного прогрева, проблемы уязвимости пары катод-нить накала лампы и использования очень высокого анодного напряжения, сопряженные с определенным риском пониженной надежности упомянутых выше компонентов системы.
В случае использования передатчика на лампе бегущей волны необходима лампа с сеткой с тем, чтобы реализовать желаемую форму электромагнитной волны.
Спектральное качество выходного сигнала непосредственно связано со спектральным качеством входного сигнала, с качеством питания цепей накала сеток катода и коллектора. Отсюда вытекает необходимость обеспечения весьма низкого уровня шума и паразитных линий в этих параметрах.
Совокупность указанных средств питания контролируется по напряжению и по току с тем, чтобы поддерживать данную лампу бегущей волны в ее нормальном эксплуатационном режиме, нарушение которого грозит повреждением лампы.
В случае использования передатчика на синхронизированном магнетроне или CFA диапазон сверхвысоких частот оказывается более узким, тогда как общая надежность системы и эксплуатационные ограничения остаются на том же уровне.
В общем случае источник сверхвысокочастотного излучения в рентгеновском диапазоне (в полосе X) является механически согласуемым, например, в диапазоне 50 МГц, что обеспечивает возможность использования отнесенной или удаленной радиолокационной станции на других частотах с тем, чтобы исключить всякие взаимные помехи.
В дальнейшем приводится описание приема по двум каналам со ссылками на фиг. 29, на которой представлен один приемный канал, и на фиг. 30, где показаны оба канала.
После каскада усиления 30 и/или противовозвратного устройства 310 первая фильтрация по сверхвысокой частоте 32 обеспечивает защиту от внешних помех и паразитных линий локального генератора. Этот фильтр перекрывает полосу примерно в 150 МГц.
В предпочтительном варианте новая блокировка в течение передачи осуществляется в блоке 330 вместе с противовозвратным устройством 33.
Смеситель 34 вместе с локальным сигналом OL1 предшествует каскаду усиления 35 и блоку фильтрации 36 (или инверсору 360, 362).
Фильтрация по промежуточной частоте (395 МГц) адаптирована к общей полосе, излучаемой данной радиолокационной станцией (эта полоса составляет 32 МГц).
При демодуляции по фазе (371, 381, 391) при совпадении фаз и при сдвиге по фазе в 90o (37Q, 38Q, 39Q) адаптированная фильтрация в импульсе осуществляется на видеосигнале.
Результирующие реальные и воображаемые или зеркальные сигналы преобразуются затем в цифровую форму. Это цифровое кодирование COD1 и COD2 осуществляется на частоте квантования 3 МГц на 12 бит, что соответствует динамике, превышающей 60 дБ.
Роль полосового фильтра 32 состоит в том, чтобы ограничить полезную полосу частот приемника и обеспечить ослабление порядка 20 дБ по зеркальной частоте, устраняя таким образом шум, введенный сверхвысокочастотным усилителем.
Таким образом, описанный выше приемник реализует демодуляцию принимаемых сигналов радиолокационной станции при помощи двойного преобразования частоты.
Рассмотрим теперь проблемы, связанные с обработкой принимаемого радиолокационной станцией сигнала.
Длительность импульса составляет примерно 0,5 мкс, что соответствует относительно узкой полосе, составляющей примерно 2 МГц на уровне передатчика.
Такая форма волны позволяет сохранить достаточную чувствительность на уровне приемника с тем, чтобы иметь возможность выявлять летательные аппараты с относительно небольшой эквивалентной радиолокационной поверхностью SEP.
Соответствующая разрешающая способность составляет примерно 75 м. Разрешающая способность данной радиолокационной станции по дальности обеспечивается путем соответствующей обработки принятого сигнала. Сжатие по дальности использует линейную модуляцию частоты передачи. Например, шестнадцать частот используются с отклонением Δ F между ними, составляющим 2 МГц. Результирующая полоса составляет 32 МГц, что соответствует разрешающей способности по дальности порядка 5 м.
Частота повторяемости FR зафиксирована на уровне 30 кГц таким образом, чтобы предложить полосу обрабатываемой дальности, составляющую примерно 5 км.
Изменение частоты передачи от импульса к импульсу позволяет освободиться от проблем выявления отраженных сигналов второго повторения.
При осуществлении цикла сжатия дальности когерентное доплеровское интегрирование позволяет получить в результате радиальную скорость зафиксированного летательного аппарата. Это интегрирование осуществляется по восьми выборкам, полученным из предыдущей обработки, и обеспечивает разрешающую способность по радиальной скорости порядка 3,75 м/с. Действительно доплеровская частота повторяемости составляет 1875 Гц (30 кГц делить на 16). Неопределенность по радиальной скорости составляет 28 м/с или 14 м/с, что является недостаточным.
Для того чтобы устранить этот недостаток, в предпочтительном варианте проводят второй цикл полной обработки в соответствии с изобретением (сжатие плюс доплеровское интегрирование) с использованием смещенной частоты повторения.
Форма волны и когерентная обработка в соответствии с фиг.25 и фиг. 26 представляют следующие характеристики:
а)
на базовой частоте повторения (FR = 30 кГц или TR =33 мкс) квантование по дальности осуществляется с частотой 3 МГц;
б) эта операция повторяется для шестнадцати различных значений частоты
передачи от FE1 до FE16 (фиг. 25), из этого следует темп FRD, составляющий 1875 Гц (для TRD = 16 х 33 мкс = 533 мкс);
с) цикл обработки содержит восемь периодов TRD и длится, таким образом, 4,
3 мс.
д) все это повторяется для второго значения частоты повторения базовой системы, оцениваемой, например, как FR + 12%.
e) до этого момента фазосдвигающие устройства по азимуту сохраняют ту же самую регулировку. Это регулировка после этого меняется и все повторяется сначала.
Обработка сигнала, относящаяся к этапу б), содержит быстрое фурье-преобразование (FFT) по 16 точкам, которое выдает 16 подъячеек на ячейку дальности.
Обработка, относящаяся к этапу c), содержит быстрое фурье-преобразование по 8 точкам, которое обеспечивает традиционное интегрирование. В качестве варианта можно использовать, например, 16 периодов TRD и быстрое фурье-преобразование по 16 точкам.
Обработка дальности и два быстрых фурье-преобразования реализуются в блоках 410 и 420 (фиг.280 соответственно для двух частот повторения. Эти блоки представляют собой процессоры обработки цифровых сигналов.
В блоках 411 и 421 осуществляется выявление и фильтрация полученных радиолокационных контактов по каналу суммы.
Выявление или детектирование осуществляется по контрасту с общим фоном земной поверхности. Детектирование по контрасту осуществляется при помощи переменного порога, величина которого запоминается в функции дальности и азимута. Запоминание фона земной поверхности регулярно обновляется для соответствующего учета метеорологических условий наблюдения.
Детектирование сигнала осуществляется только на требуемых для контроля зонах. Информация о важности тех или иных направлений хранится в географическом запоминающем устройстве 400, которое содержит статические данные, относящиеся к конкретной зоне маневрировании данного аэропорта.
Требуемая угловая точность выявления объектов контроля достигается путем использования техники одноимпульсного амплитудного определения отклонения (блоки 412 и 422), которая реализует угловую очистку или рафинирование по азимуту. Степень рафинирования представляет собой функцию соотношения сигнал/шум и, следовательно, является более значительной для больших летательных аппаратов. Она не должна быть менее 10, что позволяет обеспечить точность порядка 0,15o по оси луча и порядка 0,3o при отклонении луча на 60o от линии визирования.
После рафинирования скорости (в частности, интерполяции между двумя соседними контактами по скорости) в блоках 413 и 423 неопределенность скорости снимается при помощи ответных сигналов двух циклов (415). Обработанный таким образом диапазон представляет неопределенность по скорости существенно за пределами величины ± 100 м/с, что позволяет перекрыть весь диапазон практически используемых скоростей захода на посадку и приземления летательных аппаратов.
В целом рафинирование радиальной скорости включает снятие неопределенности по данным, поступающим от двух циклов обработки с различными частотами повторяемости и рафинирование радиальной скорости при помощи уравновешивания между доплеровскими фильтрами. Точность по радиальной скорости обеспечивается на уровне порядка 1 м/с.
После этого приступают к рафинированию по дальности в блоке 416, в частности, путем интерполяции между соседними контактами по дальности и скорости. Рафинирование по дальности позволяет повысить, если это необходимо, точность определения дальности и получить истинную дальность путем проекции косой дальности или наклонной дальности.
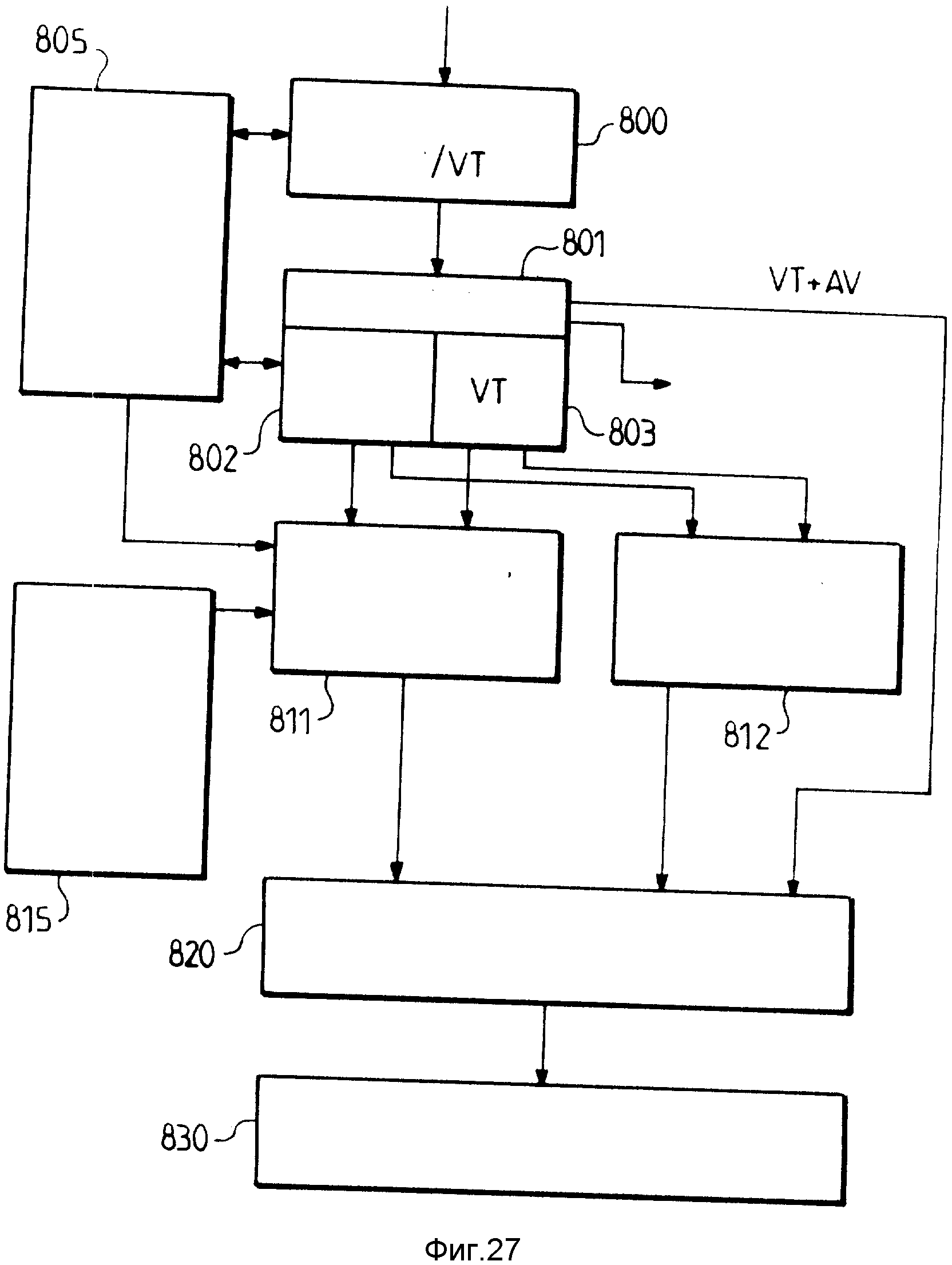
В том, что касается обработки полученных данных, она группирует все виды этой обработки, начиная с окончательно запомненных элементарных контактов (800 на фиг.27) и до генерирования собственно радиолокационной информации.
Система обработки данных получает радиолокационные контакты, выдаваемые блоками обработки сверхвысокочастотных сигналов, упомянутыми выше, и, в случае необходимости, радиолокационные контакты, принимаемые от блоков предварительной обработки вынесенной радиолокационной станции.
Группирование элементарных радиолокационных контактов с объектом (800) осуществляется при помощи проверки близости и непрерывности или неразрывности между контактами трех параметров (дальность, скорость и угловое положение), на основании чего каждый выявленный объект отслеживается или трассируется в блоке 801.
В зависимости от размеров объекта осуществляется его классификация (самолет 802, наземное транспортное средство 803). Эта классификация основывается главным образом на количестве выявленных контактов и распределении этих контактов с привязкой к базе "мобильных" данных 805.
Вычисление вектора скорости выявленного объекта осуществляется путем проектирования радиальной скорости данного объекта на линию его перемещения, получаемую из географического запоминающего устройства 815 (взлетно-посадочная полоса, рулежные дорожки).
При трассировке используется экстраполяция положения данного объекта с использованием мгновенного вектора скорости. Будущее положение объекта предсказывается с использованием фильтра Калмана.
Устранение фантомных изображений осуществляется посредством специального алгоритма, который опирается на
знание зон риска и
существование явлений мультитраекторности, эти данные запоминаются в географическом запоминающем устройстве;
корреляцию с наличием других объектов в зоне контроля;
вероятность
присутствия данного радиолокационного контакта в рассматриваемой зоне (понятие зон появления вероятных объектов).
Частота обновления этой информации адаптируется в зависимости от рассматриваемой зоны. Действительно, если вполне разумно и полезно обновлять информацию с частотой в 1 Гц в зонах, где объекты или цели перемещаются быстро и где они могут появиться в поле зрения радиолокационной станции, то такое обновление информации необходимо проводить.
Однако такой необходимости не возникает в тех случаях, когда объекты или цели имеют относительно малые скорости передвижения в пространстве.
Следует отметить, что электронное сканирование, не имея никаких инерционных ограничений по определению, обладает несомненным преимуществом полной адаптации сканирования радиолокатора к контролируемой зоне пространства.
Наконец, предусматривается эксплуатационная обработка, которая группирует операции обработки, осуществляемые над данными, получаемыми при наводке и юстировке радиолокатора. Эта обработка также опирается на информацию, содержащуюся в географическом запоминающем устройстве.
Может быть предусмотрена, например, специальная функция предупреждения столкновений между объектами или между объектами и неподвижными сооружениями. Эта функция предупреждения столкновений 811 реализуется путем экстраполяции пространственных положений и скоростей этих объектов на несколько секунд вперед.
На выходе блока функции предупреждения столкновений выдается информации об опасности столкновения.
Может быть предусмотрена также функция предупреждения о вторжении 812. Она касается контроля за заранее определенными опасными зонами или зонами риска, а также контроля за периметром зоны маневров аэропорта.
В предпочтительном варианте практической реализации радиолокационной станции в соответствии с изобретением может быть реализована функция ненормального поведения объекта, предназначенная для уведомления пользователя об аномалиях, относящихся к траектории "радиолокационной ВПП", например, о самолете, выкатывающемся с взлетно-посадочной полосы на грунт.
Функция пролета данного аэропорта позволяет указать любую ВПП или любой летательный аппарат, имеющий траекторию и скорость, не соответствующие нормальным зонам и траекториям (случай вертолетов и пролетов на малой высоте).
Информация 820 на выходе радиолокатора представляется в форме элементарных контактов, объектов или трасс, снабженных такими необходимыми атрибутами, как скорость, размеры, риск столкновения. Эти данные представлены в цифровой форме и пригодны, таким образом, для внешней визуализации в системе.
Характер выдаваемой информации обеспечивает возможность последующего ее объединения с данными, поступающими от других источников. Таким образом, легко могут быть реализованы различные функции корреляции. Вся информация выдается в соответствующее устройство связи 830 с оператором и/или с машиной.
В случае необходимости радиолокационная станции в соответствии с изобретением может быть оснащена специальным графическим процессором и цветной системой визуализации. В этом случае соответствующее радиолокационное изобретение рассчитывается в процессоре и передается уже в видеостандарте на монитор оператора-контролера.
Связи между основным радиолокатором и отнесенным или удаленным радиолокатором данной установки представляют собой связи последовательного серийного стандартного типа, которые позволяют обеспечить взаимосвязь на расстоянии при помощи, например, радиорелейной линии.
Теперь будут более подробно рассмотрены используемые в изобретении фазосдвигающие устройства.
Для реализации необходимого закона изменения фазы выбранный принцип функционирования элементов фазосдвигающих устройств состоит в коммутации ячеек сдвига фазы битов и соединении их для обеспечения желаемой величины. Ячейки сдвига фазы представляют собой длины линий передачи и для их коммутации используются диоды PIN. Потери от введения фазосдвигающего элемента составляют величину порядка 2,5 дБ. Эти устройства являются взаимозаменяемыми в предпочтительном варианте их практической реализации. Они работают одновременно и на прием, и на передачу в случае фазосдвигающих устройств на диодах.
Элементы фазосдвигающих устройств обладают следующими электрическими характеристиками:
рабочая частота функционирования
располагается в рентгеновском диапазоне излучения (полоса X);
ширина полосы составляет величину порядка 150 МГц;
показатель или индекс в стационарной волне на приеме/передаче
составляет порядка 2:1 по максимуму;
допустимая пиковая мощность составляет примерно 3 Вт;
максимальные потери составляют не более 2,5 дБ;
сдвиг фазы осуществляется в
пределах от 0 до 337,5o;
элементарный шаг сдвига фазы составляет 22,5o;
точность фазы составляет 10o RMS;
команды наводки используются в
цифровой форме, например, в виде двоичных слов в 4 бита;
габаритные размеры устройства составляют 90 х 60 х 13 мм.
Элементарный модуль фазосдвигающего устройства включает кроме фазовращателя цифровые регистры, необходимые для запоминания величин, присылаемых в результате наводки.
Центральный вычислитель определяет величину углового значения по азимуту, нужную в данный момент времени. Это значение разлагается на 96 элементарных функций, перекрывающих желаемую область пространства. Каждой из этих 96 элементарных функций соответствуют 96 двоичных слов по 12 бит каждое. Из этих 12 бит 7 представляют собой адрес и 4 бита соответствуют информации (4 бита информации соответствуют значениям сдвига фазы), запасенной в программируемом запоминающем устройстве PROM.
Затем процессор управления выдает команду на специальную шину, которая запитывает фазосдвигающие устройства при помощи небольшого интерфейса. Адрес каждого фазосдвигающего устройства подключается при помощи внешнего устройства, доступного снаружи.
Обработка данных в реальном времени имеет целью придать радиолокационной станции в соответствии с изобретением такие характеристики по точности, области неопределенности и различимости отдельных объектов, которые бы приближались к теоретическим характеристикам, связанным с облучением и с формой волны.
Например, шаг фильтрации при квантовании по дальности составляет порядка 50 м для больших аэропортов и порядка 5 м для аэропортов малых размеров.
Шаг фильтрации по скорости составляет примерно 3,75 м/с, тогда как ширина луча в оси составляет примерно 1,5o.
При таких характеристиках диапазон работы данной радиолокационной станции по дальности составляет примерно от 100 до 4500 м с диапазоном определенности по дальности от 0 до 36 м. Снятие неопределенности по скорости составляет ± 100 м/с с диапазоном определенности порядка ± 14 м/с.
Число первичных фильтров по квантовой дальности с шагом по дальности 50 м для 90 больших портов содержит каждый 16 фильтров, по скорости 8 фильтров, по направлению 90 фильтров или в целом порядка одного миллиона фильтров.
Этот миллион фильтров рассчитывается два раза по каждому направлению (использование двух различных частот повторения необходимо для снятия неопределенности скорости). Анализ зоны пространства в 120o по азимуту соответствует 72 обрабатываемым направлениям или максимальному времени обновления информации 0,56 с.
Производительность расчетов определяется из условия обеспечения случая работы нескольких антенн.
Один из вариантов антенны будет состоять в использовании рефлектора, адаптированного для формирования лепестка диаграммы направленности в форме обратного квадратного косеканса и снабженного сотней источников излучения, располагающихся продольно перед этим рефлектором для его питания.
В другом варианте антенна может представлять собой излучающее мозаичное панно, в котором волноводы заменены на диэлектрическую пластину, на которую нанесены печатные плоские излучающие пластинки, функционально эквивалентные излучающим щелям антенны с волноводами.
Основные преимущества изобретения могут быть пояснены следующим образом.
В известных обзорных радиолокационных станциях для контроля зон аэропортов стремятся использовать возможно более высокую угловую разрешающую способность при помощи весьма тонкого по азимуту луча (с раствором обычно от 0,2 до 0,4o) с применением механического сканирования антенны по азимуту. Для достижения нужной разрешающей способности на целях основываются главным образом на высоком разрешении по дальности. Таким образом, длительность импульса выбирается очень короткой, что подразумевает высокую мощность излучения.
В изобретении использован радикально противоположный подход, совершенно необычный для таких радиолокационных станций.
Заявитель обратил внимание на то
обстоятельство, что радиолокатор с антенной-решеткой, которому можно придать угловое раскрытие луча по азимуту порядка 1,5o, может быть использован при следующих условиях:
снабжая
локатор каналами приема суммарного и разностного сигналов, обеспечивает возможность локализации цели в излучаемом пучке с точностью, доходящей до примерно 1/15 величины углового раскрытия этого пучка,
что является вполне достаточным для получения удовлетворительного разрешения;
такой луч или пучок имеет базовую разделительную способность по углу, меньшую, чем разделительная способность
радиолокационных станций известного типа.
Однако заявитель обратил внимание также на то, что реальная разделительная способность предлагаемой радиолокационной станции является функцией дальности, азимута и скорости. Совершенствуя использование трех этих параметров, в частности, путем увеличения частоты повторения, изобретение позволяет достичь эффективной разделительной способности, вполне достаточной для намечаемого применения данной радиолокационной станции.
Кроме того, применение множества частот передачи ("гребенки") частот и, в случае необходимости, множества различных частот повторения позволяет в значительной степени повысить точность по дальности, которая может достигать 5 м, допуская при этом ширину импульса передачи значительно большую, чем для известных радиолокационных станций.
В то же время многочисленные преимущества предлагаемой радиолокационной станции вытекают из модульного принципа ее построения. Действительно, известно, что радиолокатор контроля аэропорта должен быть постоянно в рабочем состоянии. При использовании радиолокационных станций обычного типа это обстоятельство предлагает дублирование всего или почти всего оборудования, обеспечивающего соответствующий радиолокационный контроль.
Радиолокатор же в соответствии в изобретением вследствие модульного принципа построения и своей существенно меньшей мощности характеризуется значительно менее жесткими требованиями к различному вспомогательному оборудованию (для него достаточно, например, обычного кондиционирования) и, что особенно важно, способен функционировать в режиме наличия определенных повреждений и отказов без существенной потери своих эксплуатационных характеристик, например, во многих случаях локализованных или точечных отказов, в частности отказа одной колонки излучающих элементов антенны или связанных с ней приемопередающих элементов.
И хотя предлагаемая радиолокационная станция особенно отчетливо обнаруживает свои преимущества именно в описанном выше случае применения, она может также найти и другие варианты использования, где возникают аналогичные проблемы.
Прилагаемые формулы
E(y) = A(y) х exp[j.Ф(y) [L 1]
Er(f) = Ei х T(f) [L 2]
Ф(х) = K( θ ), х [L 3]
Реферат
Обзорная радиолокационная станция содержит в комбинации одну неподвижную антенну для обеспечения электронного сканирования контролируемого пространства по азимуту в горизонтальной плоскости, источник излучения и средства приема передачи сверхвысокочастотного сигнала с циркулятором, канал передачи, канал приема и средства для подразделения упомянутого выше канала приема на сигнал сумки и по меньшей мере один сигнал разности. Первый и второй приемные элементы с изменением частоты принимают соответственно сигнал суммы и сигнал разности и выдают свои выходные сигналы, закодированные в цифровой форме. Средства обработки обрабатывают цифровые сигналы, поступающие из первого и второго приемных элементов, для радиолокационного выявления объектов или целей в контролируемой зоне. Технический результат заключается в простоте и уменьшенной стоимости эксплуатации. 1 с. и 19 з.п. ф-лы, 31 ил.

Комментарии