Система и способ для обнаружения опасных объектов и веществ - RU2415402C1
Код документа: RU2415402C1
Чертежи








Описание
Область техники
Область изобретения относится в общем к системам контроля и обнаружения и более конкретно относится к системе и способу для обнаружения опасных объектов и веществ.
Уровень техники
В сегодняшнем мире задача обнаружения замаскированных бомб и оружия становится все более и более важной. Чем выше разрешение радиоизображения, тем выше вероятность обнаружения замаскированного опасного объекта и тем ниже частота ложных тревог. Однако в настоящее время доступные системы не обеспечивают мобильное и все же экономичное решение для обнаружения опасных объектов посредством реконструкции различимых изображений сканируемых объектов.
Большинство из современных систем для обнаружения взрывных устройств и оружия основаны на технологии электромагнитного поля. Такие системы требуют, чтобы индивидуальные объекты проходили через фиксированный проход. При прохождении металлических объектов через этот проход активируется предупреждающий сигнал, указывающий изменение в магнитном потоке. Этот тип системы просто обнаруживает металлические объекты без определения количества присутствующего металла. Ключи, драгоценности, часы и очки с металлической оправой могут запускать такую систему.
Другой тип системы обнаружения генерирует микроволновое изображение объекта в дополнение к информации оптического изображения. В то время как микроволновое изображение может обеспечить дополнительную информацию по замаскированным объектам при использовании в сочетании с оптическим изображением, микроволновое изображение все же не дает точности, необходимой для точного распознавания оружия.
Сущность изобретения
Описаны система и способ для обнаружения опасных объектов и веществ. Согласно одному варианту осуществления способ предусматривает генерацию микроволнового сигнала, который отражается мишенью для воспроизведения одного или нескольких отраженных сигналов. Этот один или несколько отраженных сигналов принимаются в антенной решетке. Этот один или несколько отраженных сигналов преобразуются в цифровые отраженные сигналы. Микроволновый сигнал преобразуется в цифровой сигнал. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для определения трехмерного положения мишени. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для идентификации мишени. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для определения состояния мишени; и определения того, является ли мишень опасным объектом.
Краткое описание чертежей
Сопутствующие чертежи, которые включены как часть данного описания, иллюстрируют предпочтительный в настоящее время вариант осуществления данного изобретения и вместе с общим описанием, данным выше, и подробным описанием предпочтительного варианта осуществления, данным ниже, служат для объяснения принципов данного изобретения и обучения этим принципам.
Фиг.1 иллюстрирует блок-схему примерного радиоскопического устройства (RSD) согласно одному варианту осуществления;
фиг.2А иллюстрирует примерную антенную решетку согласно одному варианту осуществления;
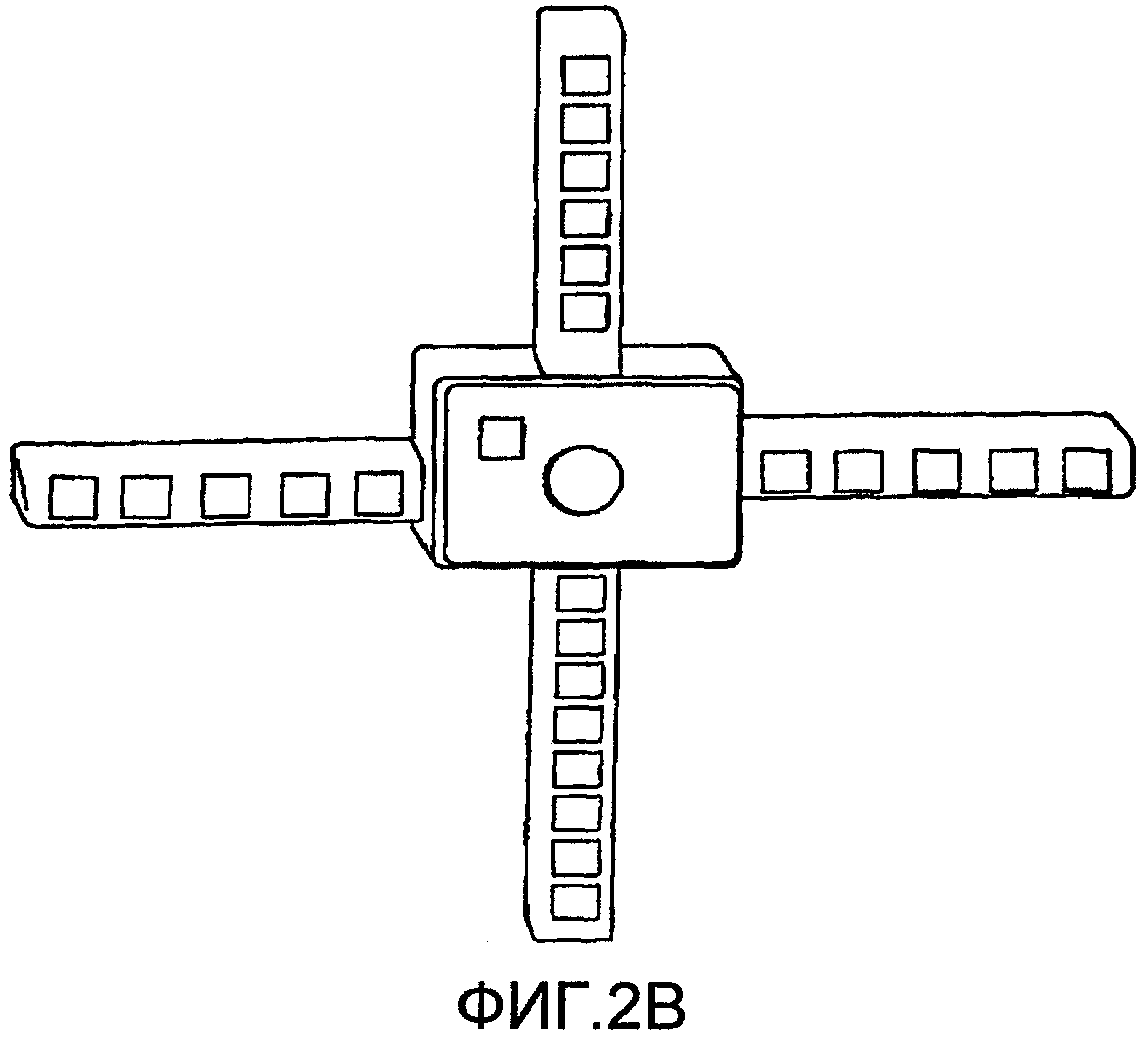
фиг.2В иллюстрирует примерную антенную решетку согласно другому варианту осуществления;
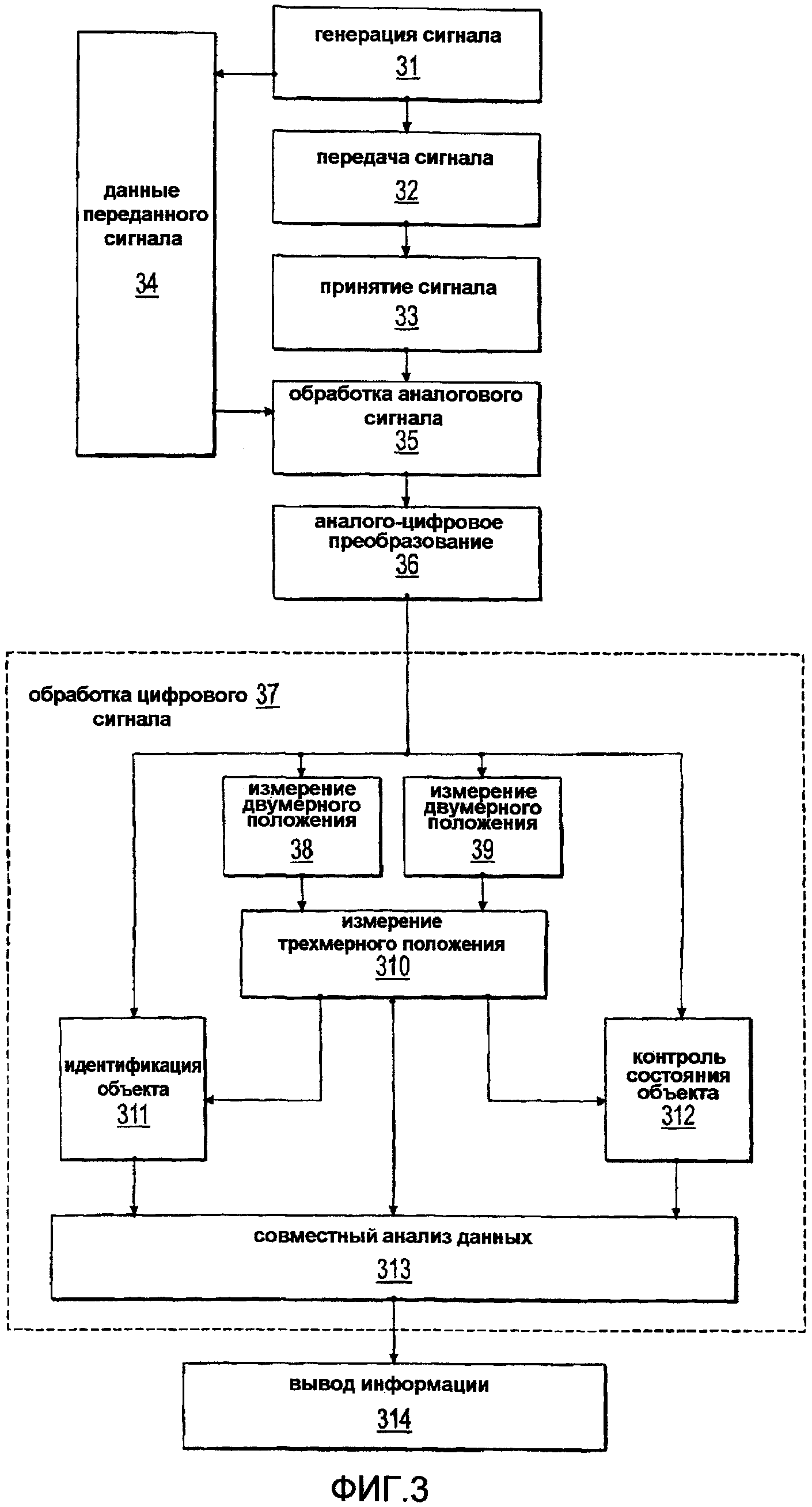
фиг.3 иллюстрирует примерный процесс для обнаружения объекта и получения радиолокационного изображения согласно одному варианту осуществления;
фиг.4 иллюстрирует примерный процесс для определения расстояния до мишени согласно одному варианту осуществления;
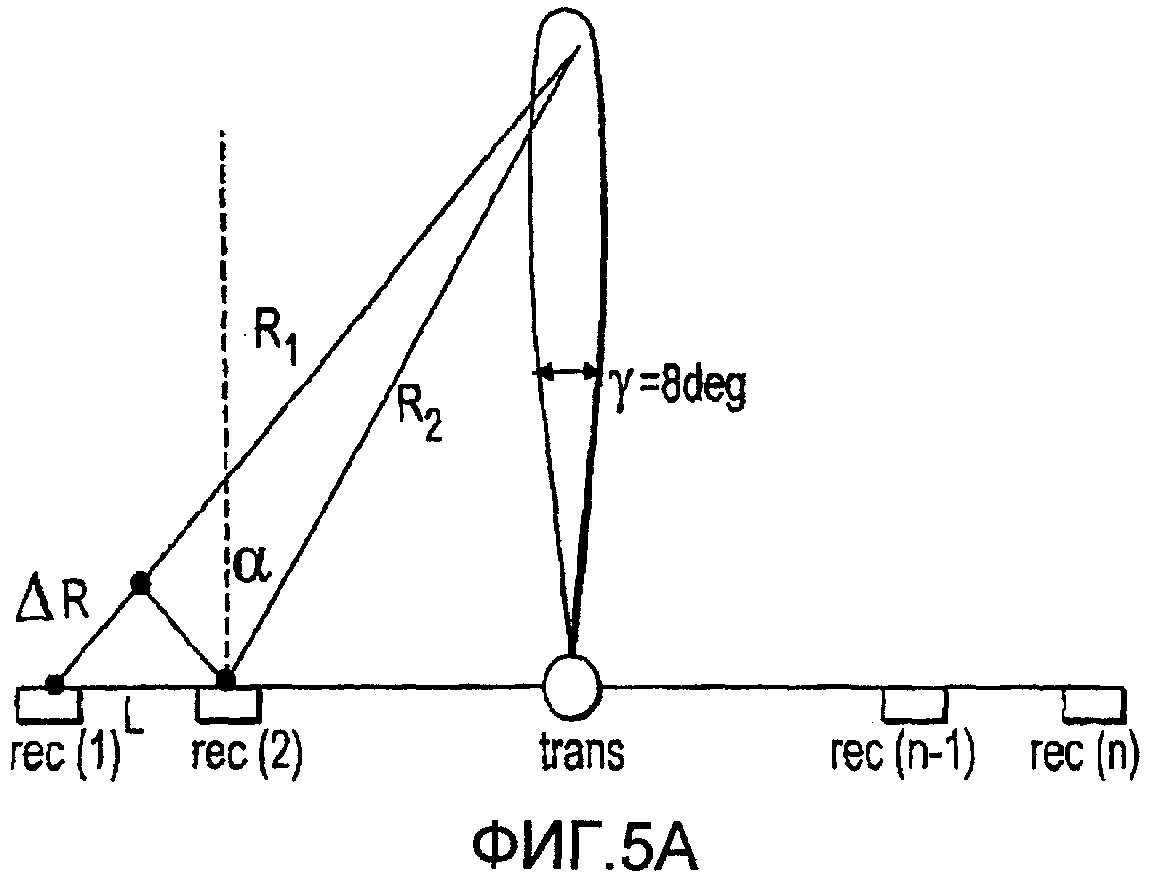
фиг.5А иллюстрирует примерный процесс для определения азимута объекта согласно одному варианту осуществления;
фиг.5В иллюстрирует примерный процесс для определения трехмерных координат объекта согласно одному варианту осуществления;
фиг.6 иллюстрирует блок-схему примерного процесса для идентификации мишени согласно одному варианту осуществления;
фиг.7 иллюстрирует блок-схему для примерного процесса обнаружения оружия согласно одному варианту осуществления;
фиг.8 иллюстрирует примерное радиоскопическое изображение обнаруженного огнестрельного оружия согласно одному варианту осуществления;
фиг.9 иллюстрирует примерный спектр сигнала с частотами поглощения согласно одному варианту осуществления;
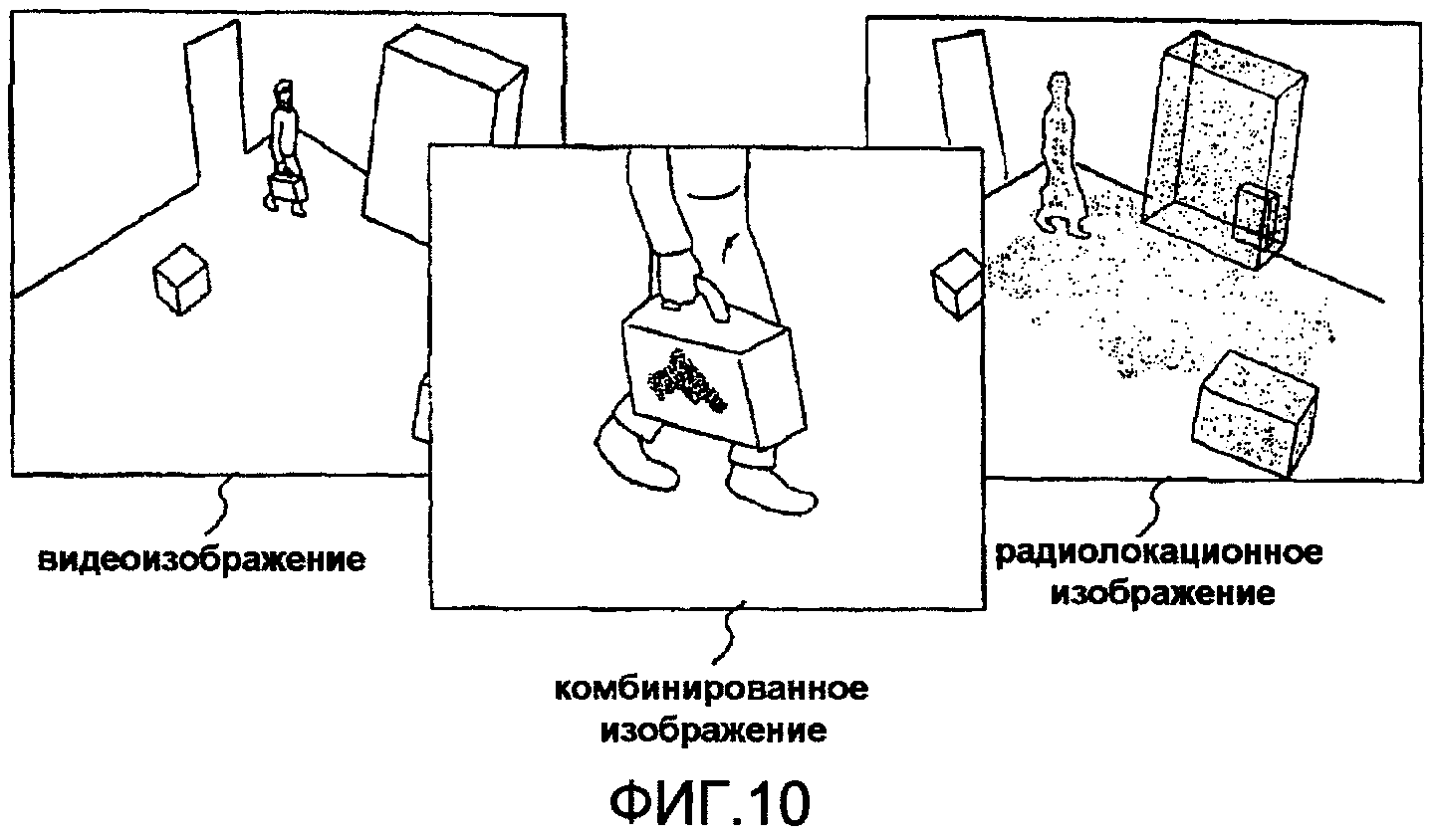
фиг.10 иллюстрирует примерное комбинированное изображение согласно одному варианту осуществления;
фиг.11 иллюстрирует блок-схему примерного процесса для определения психофизиологических параметров согласно одному варианту осуществления; и
фиг.12 иллюстрирует примерную форму волны, описывающую работу сердечной мышцы согласно одному варианту осуществления.
Подробное описание
Описаны система и способ для обнаружения опасных объектов и веществ. Согласно одному варианту осуществления способ содержит генерацию микроволнового сигнала, который отражается мишенью для воспроизведения одного или нескольких отраженных сигналов. Один или несколько отраженных сигналов принимаются в антенной решетке. Один или несколько отраженных сигналов преобразуются в цифровые отраженные сигналы. Микроволновый сигнал преобразуется в цифровой сигнал. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для определения трехмерного положения мишени. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для идентификации мишени. Цифровые отраженные сигналы и цифровой сигнал обрабатываются для определения состояния мишени; и определения того, является ли мишень опасным объектом.
Данный способ и система обнаруживают и идентифицируют опасные объекты, скрытые под одеждой или в багаже на расстоянии, например, 7 метров. Объекты большего размера, такие как пояс смертника, с металлическими частями могут быть обнаружены на расстояниях вплоть до 50 метров согласно одному варианту осуществления. Устройство также представляет радиоизображение высокого разрешения мишени, представляющей интерес для учебного исследования.
Данный способ и система дают возможность осуществления дистанционного измерения физиологических параметров и получения психофизиологической информации мишени посредством дистанционного обнаружения враждебных намерений.
В следующем описании, с целями объяснения, изложена конкретная номенклатура для облегчения понимания различных идей изобретения, описанных здесь. Однако специалисту в данной области техники будет ясно, что эти конкретные подробности не требуются для применения различных идей изобретения, описанных здесь.
Данное изобретение также относится к аппарату для выполнения операций, описанных здесь. Этот аппарат может быть специально сконструирован для требуемых целей, или он может содержать универсальный компьютер, избирательно активируемый или реконфигурируемый посредством компьютерной программы, хранимой в компьютере. Такая компьютерная программа может храниться в считываемом компьютером носителе данных, таком как, но не ограниченном этим, любой тип диска, включающий в себя флоппи-диски, оптические диски, компакт-диски и магнитно-оптические диски, ПЗУ, ЗУПВ, ЭППЗУ, ЭСППЗУ, магнитные или оптические карты, или любой тип носителя, подходящий для хранения электронных команд, и каждый из которых связан с компьютерной системной шиной.
Способы, представленные здесь, не являются свойственными какому-либо конкретному компьютеру или другому аппарату. Могут использоваться различные универсальные системы с программами в соответствии с доктринами, описанными здесь, или может оказаться удобным сконструировать более специализированный аппарат для выполнения требуемых этапов способа. Требуемая структура для разнообразия этих систем появится из описания, приведенного ниже. Кроме того, данное изобретение не описано со ссылкой на какой-либо конкретный язык программирования. Будет ясно, что может использоваться разнообразие языков программирования для реализации доктрин изобретения, описанных здесь.
Фиг.1 является блок-схемой примерного радиоскопического устройства (RSD) согласно одному варианту осуществления. RSD 100 содержит передатчик 12, передающую антенну 11, решетку из принимающих антенн 16 с отдельными каналами данных для каждой антенны, датчик 18 для приема ориентации антенн, понижающие преобразователи 17, с одним понижающим преобразователем для каждого принимающего канала данных, низкочастотные фильтры 19, с одним низкочастотным фильтром для каждого принимающего канала данных, аналого-цифровой преобразователь 110, вычислительный блок 111, схему 13 управления отклонениями частоты, схему 112 управления для поляризации антенны, возможную видеокамеру 15 и монитор 113.
Передатчик 12 генерирует сигнал, подлежащий передаче передающей антенной 11. Этот сигнал также посылается к понижающим преобразователям 17 для обработки сигнала. Сигналы, передаваемые передающей антенной 11, отражаются подвергаемым воздействию объектом 14. Отраженные сигналы принимаются решеткой из принимающих антенн 16. Отраженные сигналы, принятые антеннами 16, передаются к понижающим преобразователям 17 через индивидуальные каналы. Каждый понижающий преобразователь 17 перемножает сигналы, которые переданы передатчиком 12 и приняты антеннами 16. После преобразования преобразованные с понижением частоты сигналы обрабатываются в низкочастотных фильтрах 19, где низкочастотные составляющие преобразованных с понижением частоты сигналов отделяются в каждом канале, а затем обрабатываются аналого-цифровым (A/D) преобразователем 110. Данные цифровых сигналов, обеспеченные A/D преобразователем 110, доставляются к вычислительному блоку 111, где радиолокационное изображение подвергаемого воздействию объекта 14 конструируется и отображается на экране 113 монитора.
При оборудовании возможной видеокамерой 15, RSD 100 нацелено на объект 14 с использованием видеоизображения, формируемого видеокамерой 15 перед передачей сигнала передающей антенной 11. Видеоизображение может быть дополнительно обработано вычислительным блоком 111 и использовано для конструирования комбинированного изображения подвергаемого воздействию объекта 14 в комбинации с радиолокационным изображением подвергаемого воздействию объекта 14, обсуждаемым выше.
Для обнаружения опасных объектов, RSD 100 включает в себя схему 112 управления для поляризации антенны для формирования и передачи сигналов с различными поляризациями. Передающие и принимающие антенны RSD также поляризованы. Плоскость поляризации переданного сигнала может быть параллельной или ортогональной к плоскостям поляризации принимающих антенн. Эта особенность облегчает обнаружение опасных объектов посредством анализа деполяризации принятых сигналов.
Фиг.2А иллюстрирует примерную антенную решетку согласно одному варианту осуществления. Фиг.2В иллюстрирует примерную антенную решетку согласно другому варианту осуществления. Стратегическое размещение принимающих антенн 16 в решетках из двух ортогональных рядов дает возможность определения пространственных координат подвергаемого воздействию объекта 14. Если используется единственный ряд принимающих антенн, как показано на фиг.2А, вместо двух ортогональных рядов, как показано на фиг.2В, то используется силовой привод для поворота этого ряда. Полное изображение конструируется посредством совместной обработки сигналов, принятых, по меньшей мере, в двух положениях рядов. Для получения лучшего качества изображения эти два положения могут быть ортогональными друг к другу. Дополнительное совершенствование радиолокационного изображения может быть получено посредством принятия сигналов в промежуточных положениях. В таком случае привод оборудован датчиком положения, который обеспечивает вычислительный блок 111 данными положения для конструирования радиолокационного изображения.
Фиг.3 иллюстрирует примерный процесс для обнаружения объекта и получения радиолокационного изображения согласно одному варианту осуществления. Когда RSD 100 включено, сигнал генерируется (31), передается (32) и принимается (33). Обработка (35) аналоговых сигналов принимает сигналы от каждой из принимающих антенн и данные 34 переданных сигналов от передатчика 12 к понижающим преобразователям 17.
После завершения обработки аналоговых сигналов в низкочастотных фильтрах 19 и оцифровки (36) этих сигналов, имеет место обработка цифровых сигналов (37). Обработка сигналов включает в себя вычисления, которые: (а) определяют положение объекта в трехмерном пространстве (310) на основе двумерных координат (38 и 39); (b) завершают идентификацию (311) мишени; и (с) определяют психофизиологические свойства живых людей (312). Результаты вычислений совместно анализируются (313), и радиолокационное изображение конструируется и отображается на экране (314).
Для измерения положения объекта в двумерных координатах, вычисляется как расстояние до объекта 14, так и азимут объекта.
Для вычисления расстояния до объекта 14 высокочастотные сигналы, принимаемые антеннами 16, сравниваются с переданными сигналами с непрерывной модуляцией изменения частоты. Фиг.4 иллюстрирует примерный процесс для определения расстояния до мишени согласно одному варианту осуществления. Передающая антенна 11 излучает сигнал F'. Принятый аналоговый сигнал преобразуется понижающими преобразователями 17. Низкочастотный фильтр отделяет низкочастотную составляющую аналогового сигнала, несущую данные о расстоянии до мишени. Аналого-цифровой преобразователь 110 дискретизирует входной сигнал для формирования набора из N точек. Набор из N точек вычисляется посредством следующего равенства,

где ТМ/2 - период качания частоты от F1 до F2, τ - временной интервал между передачей сигнала и принятием сигнала, а Fd - частота дискретизации аналогового входного сигнала.
Расстояние и азимут вычисляются посредством быстрого двухмерного преобразования Фурье массива данных с размерностью nN, где n - число элементов антенны в ряду. Это приводит к функции двух переменных f (u, v). Аргумент u соответствует частоте принятого сигнала, что позволяет определить расстояние до мишени. Аргумент v соответствует разности фаз между сигналами, принятыми соседними антеннами, что позволяет вычислить азимут мишени.
Приведено примерное вычисление расстояния до объекта 14. Излученный сигнал F', после достижения мишени 14 на расстоянии R от RSD 100, отражается и впоследствии принимается принимающей антенной 16 при частоте F. Излученный сигнал принимается с временной задержкой τ=2R/c, где с - скорость света в воздухе. Принятый аналоговый сигнал преобразуется понижающими преобразователями 17. Низкочастотный фильтр 19 отделяет низкочастотную составляющую аналогового сигнала, которая после оцифровки сигнала может использоваться для вывода частоты FR, которая равна разности частот F' и F в момент времени τ1. Таким образом, расстояние R до мишени вычисляется следующим образом:


Следовательно,

Фиг.5А иллюстрирует примерный процесс для определения азимута объекта согласно одному варианту осуществления. Используются первая принимающая антенна, rec(1), антенной решетки 16 и вторая принимающая антенна, rec(2), антенной решетки.
Вычисляется разность расстояний, ΔR, от rec(1) и rec(2) до А. Фаза сигнала, принятого rec(1), задерживается по сравнению с фазой сигнала, принятого rec(2), на:

где k=2π/λ и λ - длина волны излученного (принятого) сигнала. Азимут α мишени получается посредством вычисления значений Δφ и λ.
Измерение трехмерного положения использует, по меньшей мере, два набора двумерных данных. Два набора двумерных данных получаются принимающими антеннами, расположенными в различных местах. Первый набор данных получается, когда принимающая антенная решетка расположена горизонтально. При обработке первого набора данных получается расстояние R1 до мишени и азимут α1 в горизонтальной плоскости. Второй набор данных получается, когда принимающая антенная решетка расположена вертикально, например после поворота антенной решетки на 90 градусов, или когда перпендикулярная антенная решетка используется, как показано на фиг.2В. Во время обработки второго набора данных определяются расстояние R2 до мишени и азимут α2 в вертикальной плоскости. Расстояния R1 и R2 до мишени равны, как показано на фиг.5В. Следовательно, для определения трехмерных координат мишени получаются значения трех параметров: расстояние R до мишени и два угла, α1 и α2.
Фиг.6 иллюстрирует блок-схему примерного процесса для идентификации мишени согласно одному варианту осуществления. Идентификация мишени 14 и идентификация оружия, взрывчатого или опасного вещества выполняются посредством совместного анализа данных (613), включающего в себя «портрет мишени» (62), коэффициент поляризации возвращенного сигнала (63), элементы резонансной частоты возвращенного сигнала, которые ассоциированы с наблюдаемым объектом, (64) и частоту (65) поглощения.
Если RSD 100 имеет блок поляризации со схемой управления поляризации антенн, то перевозка замаскированного оружия и шрапнели определяется через анализ деполяризации сигнала, отраженного от объекта 14.
Эхо-сигнал, отраженный от мишени 14, имеет два компонента, которые объясняются в представлении мишени как объекта с диффузным фоном и некоторыми яркими точками. Фон может казаться диффузным из-за неточности представления объекта. Вклад ярких точек является большим, чем вклад диффузных компонентов в отраженном деполяризованном сигнале. Максимальная деполяризация имеет место, когда размер наблюдаемых малых элементов составляет половину длины волны. Малыми элементами, например, могут быть шрапнель в поясе смертника, или болты, шарикоподшипники, гайки, гвозди, фрагменты металлических кусков. В качестве примера, если частота равна 50 ГГц (гигагерц), то длина волны равна около 6 мм (миллиметров), и половина длины волны равна около 3 мм. Малые элементы размера 3 мм проявляли бы максимальный эффект деполяризации.
Многочастотное излучение и анализ поляризационных характеристик применяются для улучшения качества изображения (например, коррекции эффекта ярких пятен). Из-за дискретного фазирования применяется нелинейный когерентный алгоритм. Последующая обработка разрешает любые проблемы идентификации. Нелинейный цифровой алгоритм применяется для улучшения разрешения и идентификации объекта. Обработка выполняется во временной области. В одном варианте осуществления применяется нелинейный итеративный алгоритм реконструкции пространства изображения (ISRA). ISRA имеет несколько преимуществ для текущего применения. (1) Гауссовский шум допускается, что является хорошим приближением для приложений радиометрии. (2) Решение уравнения основано на хорошей сходимости алгоритма. (3) Функция приближения является неотрицательной для соответствующего диапазона. (4) Для передаточной функции не нужны никакие дополнительные предположения, такие как инвариантность, симметрия и т.д. (5) Хотя ISRA является вычислительно интенсивным по сравнению с другими алгоритмами, он характеризуется хорошей надежностью и приводит к значительному улучшению разрешения.
Поляризация фона является случайной и слабо зависит от поляризации зондирующего сигнала. Диффузный фон создает вклад в отраженный (диффузный) сигнал. В противоположность этому, яркие точки мишени 14 создают значительный вклад в диффузный сигнал. Они вызываются тем фактом, что мишень имеет малые зеркала, ортогонально сфокусированные на линии взгляда. Если размер этих зеркал равен половине длины волны (полуволновый симметричный вибратор), то вклад в диффузный сигнал будет максимальным. Поскольку яркие точки наблюдаемого объекта являются заметными из-за их сравнительно большего коэффициента отражения относительно других точек общего фона объекта (соседних точек) - наблюдается эффект малого зеркала. Наличие таких малых зеркал (ярких пятен) позволяет осуществить идентификацию типичных угроз (оружия и т.д.) посредством их относительного положения по отношению к друг другу и фону. Поворот плоскости поляризации диффузного излучения зависит от ориентации этого симметричного вибратора. Следовательно, если зондирующее излучение поляризовано либо вертикально, либо горизонтально и симметричный вибратор сфокусирован под 45°, то диффузный сигнал содержит как вертикальную, так и горизонтальную поляризацию. Кросс-поляризация оценивается коэффициентом поляризации:
где Ai и Ak - амплитуды принятых сигналов, вычисленные при вертикальной и горизонтальной поляризации передающей антенны.
Если мишень является полуволновым симметричным вибратором, повернутым на 45° к горизонту, то коэффициент В деполяризации будет равен нулю. Поскольку действительная мишень 14 имеет случайно ориентированные симметричные вибраторы, коэффициент поляризации имеет диапазон между 0 и 1. Чем ниже коэффициент поляризации, тем больше вероятность того, что существует оружие или взрывной пояс.
Малые части огнестрельного и холодного оружия в определенной перспективе также имеют способность деполяризации. Поскольку оружие имеет меньше малых частей, чем взрывной пояс, коэффициент деполяризации взрывного пояса и оружия значительно отличается из-за разницы в количестве «малых частей», что выражается отношением:
Bweapon>Bexplosive_belt.
Поскольку RSD 100 обнаруживает движущихся и живых людей, обнаружение оружия и взрывных поясов может быть осуществлено избирательно для каждого облучаемого человека. Это позволяет отделять вооруженных людей и отобразить их на экране.
Фиг.7 иллюстрирует блок-схему для примерного процесса обнаружения оружия согласно одному варианту осуществления. Когда коэффициент поляризации отраженного сигнала был вычислен (71), коэффициент В поляризации проверяется (72) относительно экспериментально определенного порога Bthreshold. Если В≤Bthreshold, то коэффициент В поляризации анализируемого сигнала проверяется (73) относительно заданного значения Bexplosive_belt. Если Bthreshold>B>Bexplosive_belt, то принимается решение (74), что объект несет огнестрельное или холодное оружие. Если В
Если сигнал отражается объектом неоднородной структуры, то RSD 100 формирует массив радиолокационных поперечных сечений точек объекта в исследуемом пространстве. С использованием возвращенного сигнала и координат объекта в трехмерном пространстве, вычисленных из отраженного сигнала, RSD 100 конструирует радиолокационное изображение («портрет мишени» 62). Оружие обнаруживается (69) посредством соответствия «портрета мишени» с библиотекой (66) изображений образцов.
Фиг.8 иллюстрирует примерное радиоскопическое изображение обнаруженного огнестрельного оружия согласно одному варианту осуществления. Большинство оружия имеет высокую способность отражения, и части оружия, которые имеют их индивидуальные частотные характеристики, могут резонировать при подвергании воздействию микроволновых сигналов. Возвращаясь к фиг.6, RSD 100 отделяет резонансные частоты (64). Отделенные резонансные частоты согласовываются (67) с экспериментально полученной библиотекой изображений образцов. RSD 100 определяет, переносится ли оружие или взрывной пояс (611).
Для создания радиоскопического изображения вычислительный блок 111 обрабатывает возвращенный сигнал. Для каждой точки в пространстве, наблюдаемом RSD 100, определяются координаты точки изображения и параметры возвращенного сигнала (например, интенсивность сигнала и степень поляризации). Контраст (например, яркость) каждой точки изображения, отображаемой на мониторе, вычисляется на основе интенсивности сигнала: чем сильнее сигнал, тем темнее (оттенок серого) точка изображения.
Взрывчатые и другие опасные вещества, подвергнутые воздействию микроволновых сигналов, могут поглощать излучение в определенных полосах частот. Фиг.9 иллюстрирует примерный спектр сигнала с частотами поглощения согласно одному варианту осуществления. RSD 100 определяет (65) эти частоты поглощения. Радиосигнал отражается наблюдаемым объектом не только посредством его передней поверхности (относительно устройства), но также посредством его задней поверхности. При прохождении модулированного по частоте сигнала через объект к его задней поверхности, его амплитуда изменяется. В зависимости от химического состава вещества, сильное поглощение сигнала может наблюдаться при специфических частотах, характеризующихся этим химическим составом. Отраженный сигнал проявляет наличие полосы частот поглощения, амплитуда которого значительно уменьшена по сравнению с излученным модулированным по частоте сигналом. Отделенные частоты поглощения согласуются (68) с экспериментально полученной библиотекой изображений образцов. Определяется (612) наличие взрывчатого или другого опасного вещества.
При получении всей информации об анализируемой мишени, RSD 100 создает комбинированное видеорадиолокационное изображение исследуемой мишени 14. Эта картинка может очень помочь оператору дифференцировать подозрительные мишени от обычных мишеней. Фиг.10 иллюстрирует примерное комбинированное изображение согласно одному варианту осуществления.
Фиг.11 иллюстрирует блок-схему примерного процесса для определения психофизиологических параметров согласно одному варианту осуществления. Анализ изменений в эффективном радиолокационном поперечном сечении (ERCS) определяет изменения в потении. Флуктуации в ERCS дают информацию о плетизмограмме, дыхании, вазомоторных функциях и мышечном тонусе. Каждый физиологический параметр имеет свою собственную частоту флуктуаций. Типичные вазомоторные сигналы имеют диапазон 0,0017-0,017 Гц, сигналы мышечного тонуса - 0,017-0,17 Гц, сигналы дыхания - 0,08-0,5 Гц и сигналы сердечных сокращений - 0,67-4 Гц.
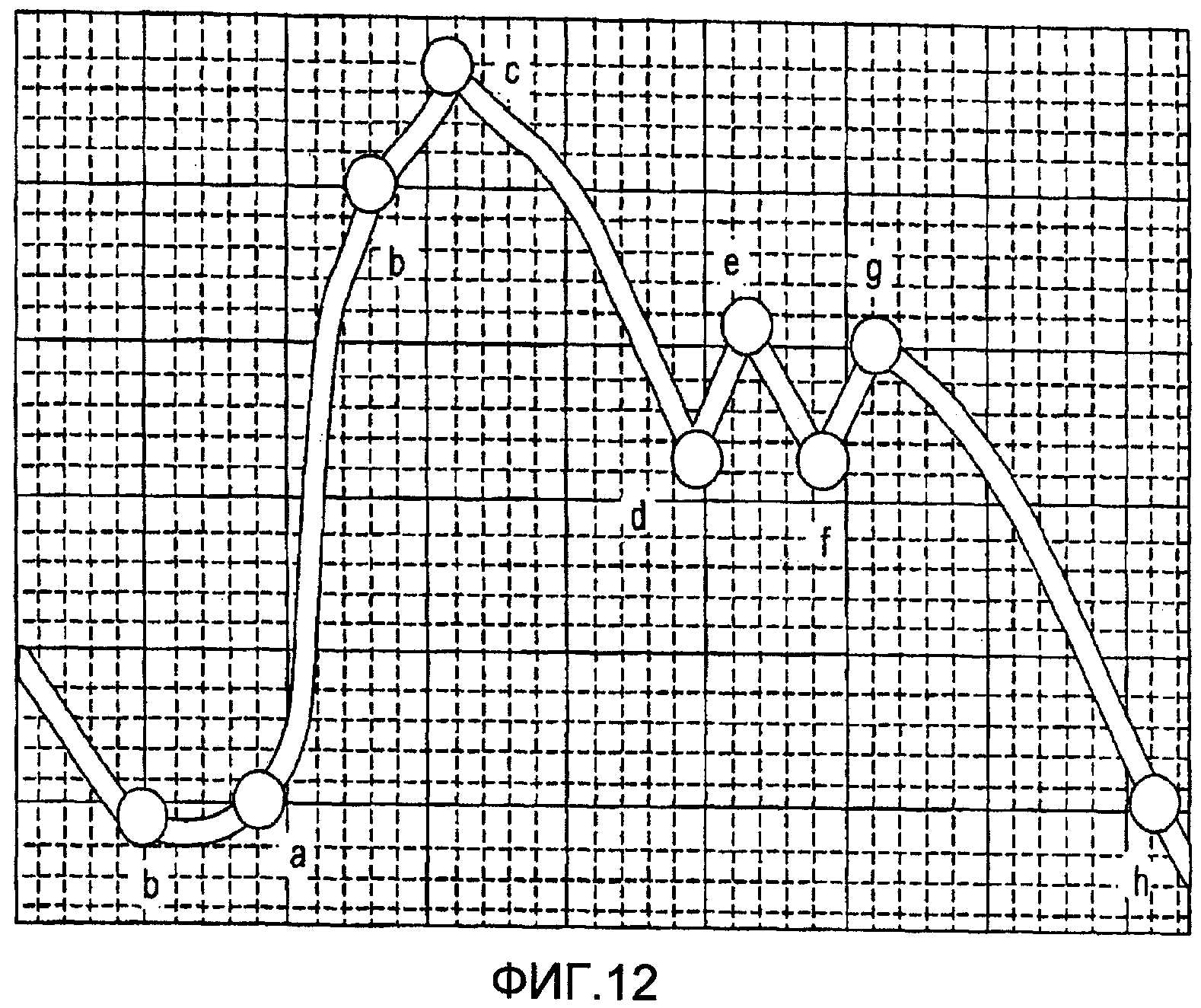
Фиг.12 иллюстрирует примерную форму волны, описывающую работу сердечной мышцы согласно одному варианту осуществления. Из формы волны, построенной RSD, можно определить время выброса крови левого желудочка (LVET) и пульс. LVET является параметром сердца (скорость сокращения левого желудочка), который, как известно, связан с «враждебными намерениями». Левый желудочек является, в сущности, «насосом», который толкает кровь на «большом круге кровообращения». Правый желудочек качает кровь на меньшем дыхательном/легочном круге кровообращения.
RSD 100 обнаруживает плетизмограмму в реальном времени. Плетизмограмма является выведенным «измерением» сердечной деятельности. Плетизмограмма может использоваться для оценки сердечной деятельности и вычисления LVET на основе анализа флуктуаций в амплитуде отраженного сигнала и относительного положения характеристических точек на плетизмограмме.
Фиг.12 показывает типичный сердечный цикл (плетизмограмму), имеющий следующие фазы, представляющие интерес: a-b-c - фаза систолы (сердца) с увеличенным давлением во время сокращения сердечной мышцы; с-d - фаза уменьшения давления в заключительной части систолы; е - фаза закрытия полулунных клапанов; и f-g-h - фаза уменьшения кровяного давления во время диастолы.
Фаза a-b-c, изометрическое сокращение систолы желудочка, имеет место с закрытыми сердечными клапанами. Начало этой фазы совпадает с фазой резкого увеличения во внутреннем к желудочкам давлении. Производная в точке «а» может использоваться для анализа интенсивности и скорости работы желудочка. Амплитуда а-b-c коррелирует с артериальным давлением; одним из основных параметров работы сердца. Измеренное периферическое кровяное давление может анализироваться как отфильтрованное фильтром нижних частот артериальное давление.
Следовательно, работа левого желудочка может характеризоваться (а) частотой сердечных сокращений; (b) скоростью, с которой мышечная ткань левого желудочка изменяет ее тон, например переходы от расслабленного состояния в сжатое состояние; и (с) кровяное давление, созданное левым желудочком для открытия клапана (мгновенная мощность насоса относительно одного выброса крови из желудочка).
Поскольку правый желудочек работает с мощностью, на порядок меньшей, плетизмограмма периферического пульса обеспечивает богатый источник информации о физиологии левого желудочка. Обработка физиологических параметров дает возможность определить враждебные намерения анализируемой мишени.
Психологическое состояние человека может характеризоваться значениями физиологических параметров, показанных на фиг.11. В зависимости от психологического состояния, например уровней стресса, человек может испытывать потение, изменения в частоте дыхания и пульсе, изменения в мышечном тоне и т.д. Следовательно, изменения в физиологических параметрах тела человека могут наблюдаться. Эти изменения в основном коррелируют с различными гемодинамическими изменениями (например, изменениями в количестве/объеме/наличии крови в различных человеческих органах, сосудах и мышцах). Гемодинамические изменения (глобально для всего тела человека или локально для каждой части тела) могут быть измерены посредством наблюдения этих изменений в общем ERCS наблюдаемого человека и ERCS каждой части тела отдельно. Сигналы, относящиеся к этим психологическим параметрам, сравниваются с критическими порогами и порогами базовой линии, определяемыми экспериментально. Относительные изменения значений всех важных наблюдаемых физиологических параметров могут учитываться и сравниваться с использованием заданных шаблонов или правил. Осуществляется сравнение между наблюдаемыми значениями и библиотекой значений, определяющих типичные различные психологические состояния. Различия между наблюдаемыми значениями и значениями из этой библиотеки могут использоваться в определении психологического состояния наблюдаемого человека и в последующих заключениях о возможных враждебных намерениях наблюдаемого человека.
Описаны система и способ для обнаружения опасных объектов и веществ. Ясно, что варианты осуществления, описанные здесь, даны с целью разъяснения и не должны считаться ограничивающими предмет рассмотрения данного патента. Различные модификации, использования, подстановки, комбинации, усовершенствования, способы изготовления, не выходящие за рамки объема и сущности данного изобретения, будут очевидны для специалиста в данной области техники.
Реферат
Использование: для обнаружения опасных объектов и веществ. Сущность: заключается в том, что генерируют микроволновый сигнал, который отражается мишенью для воспроизведения одного или нескольких отраженных сигналов; принимают один или несколько отраженных сигналов на антенной решетке; преобразуют один или несколько отраженных сигналов в цифровые отраженные сигналы; преобразуют микроволновый сигнал в цифровой микроволновый сигнал; обрабатывают цифровые отраженные сигналы и цифровой микроволновый сигнал для определения трехмерного положения мишени; обрабатывают цифровые отраженные сигналы и цифровой микроволновый сигнал для идентификации мишени. Технический результат: обеспечение мобильного и точного распознавания опасных объектов с возможностью определения их трехмерного положения посредством микроволнового излучения. 2 н. и 9 з.п. ф-лы, 12 ил.
Формула
генерируют микроволновый сигнал, который отражается мишенью для воспроизведения одного или нескольких отраженных сигналов;
принимают один или несколько отраженных сигналов на антенной решетке;
преобразуют один или несколько отраженных сигналов в цифровые отраженные сигналы;
преобразуют микроволновый сигнал в цифровой микроволновый сигнал;
обрабатывают цифровые отраженные сигналы и цифровой микроволновый сигнал для определения трехмерного положения мишени;
обрабатывают цифровые отраженные сигналы и цифровой микроволновый сигнал для идентификации мишени.
сравнивают цифровое представление мишени с одной или несколькими мишенями, хранимыми в цифровой библиотеке.
передатчик в мобильном устройстве, включающий в себя передающую антенну, вибратор, схему управления поляризацией антенны и генератор с управляемым напряжением;
одну или несколько принимающих схем радиоканалов в мобильном устройстве, причем один или несколько радиоканалов включают в себя принимающую антенну, понижающий преобразователь, низкочастотный фильтр;
модуль обработки цифровых сигналов в мобильном устройстве и видеодисплей,
при этом принимающая антенна одного или нескольких принимающих радиоканалов принимает отраженные сигналы от сканируемого объекта.
принимающая антенна одного или нескольких принимающих радиоканалов принимает отраженные сигналы, отраженные от сканируемого объекта, на плоскости поляризации; и
угол поляризации передатчика является параллельным или ортогональным к плоскости поляризации принимающей антенны одного или нескольких принимающих радиоканалов.
Документы, цитированные в отчёте о поиске
Устройство для измерения концентрации двух веществ
Комментарии