Радар формирования подповерхностного изображения - RU2453864C2
Код документа: RU2453864C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству радара формирования подповерхностного изображения, содержащему узел передачи и узел приема, узел передачи является выполненным с обеспечением возможности передавать первый радиоволновый сигнал в лепестке на выбранный участок земли под выбранным углом θ места к участку земли. Изобретение также относится к способу для устройства радара формирования подповерхностного изображения.
УРОВЕНЬ ТЕХНИКИ
На сухих и открытых участках многих современных конфликтов погружение в землю объектов является обычным элементом военной тактики. Разумное объяснение заключается в том, что это является зачастую единственным способом их маскировки, и очень простым для осуществления, например в песчаном грунте. Этими объектами могут быть мины, замаскированное оружие или туннели и бункеры. Соответственно, есть большая потребность в эффективном средстве обнаружения этих типов погруженных в землю объектов.
Условия и цели для обнаружения погруженных в землю объектов меняются. Однако объем наблюдения, связанный с высокой вероятностью обнаружения, является основной заботой. Например, военный транспорт в пути по дороге должен давать возможность обнаруживать мины, которые могут нанести ему ущерб, при движении с некоторой приемлемой скоростью. В противоположность, после заключения мирного договора есть очень сильная потребность в эффективном разминировании, требующем, чтобы все мины были найдены и обезврежены. Они могут быть распределены по большим участкам и не всегда таким образом, который хорошо контролируется. В этом случае, нет требования реального времени, хотя задача наблюдения часто настолько велика, что объем наблюдения должен быть громадным. Поиск замаскированного оружия часто разграничен определенными участками и может не иметь никакого прямого требования реального времени. Однако может быть крайняя стесненность получать результаты в установленные предельные сроки, поэтому объем наблюдения также является заботой в этом случае.
Развивающейся прикладной областью является реконструкция бывших военных складских и учебно-тренировочных участков для гражданского землепользования. Эти участки могут быть серьезно загрязнены невзорвавшимися боеприпасами и вредными отходами. Местоположение залежей отходов может быть забыто по причине внезапных и существенных организационных изменений, например, в Восточной Европе.
Когда потребности в наблюдении велики, использование ручных устройств обнаружения мин может быть неэффективным. Также самоходные устройства обнаружения, зависящие от магнитостатических или электростатических явлений (таким образом, измеряющие магнитную проницаемость или диэлектрическую постоянную земли), обладают низким объемом наблюдения. Причина состоит в том, что статические поля ослабевают на коротких дальностях, требуя осторожных и медленных передвижений в процессе обнаружения. В противоположность, радар основан на электромагнитном излучении. Поскольку ослабление электромагнитного излучения дальностью является меньшим, чем у электростатических полей, радар представляется принципом, который должен быть предпочтительным для обнаружения подповерхностных объектов с большой зоной обзора.
Подповерхностные объекты могут быть небольшими, а их сигнатуры очень слабыми. Поэтому устройство обнаружения должно воспринимать только малый участок земли, где возмущение земли из-за присутствия объекта будет относительно заметным. Проблема с радаром, работающим на больших дальностях наблюдения, таким образом, состоит в том, как получать достаточную разрешающую способность, отделяя небольшие объемы земли. Принцип радара с синтезированной апертурой, SAR (Synthetic Aperture Radar), является широко известным способом для получения высокого 2-мерного разрешения земной поверхности.
Радар с синтезированной апертурой, SAR, может использоваться с земли и с воздуха. Бортовой авиационный SAR формирует двумерные изображения, перпендикулярные траектории полета летательного аппарата. Одно измерение в изображении называется дальностью (или поперечной проекцией курса) и является мерой расстояния «прямой видимости» от радара до цели. Измерение и разрешающая способность по дальности достигаются в радарах с синтезированной апертурой тем же способом, что и в большинстве других радаров. Дальность определяется точным измерением времени от передачи импульса до приема эхо-сигнала от цели и, в простейшем SAR, разрешающая способность по дальности определяется длительностью переданного импульса, то есть короткие импульсы дают высокую разрешающую способность по дальности.
Другое измерение называется азимутом (или продольной проекцией курса) и является перпендикулярным к дальности по земной поверхности. Способностью SAR является создание относительно высокой разрешающей способности по азимуту, что отличает его от других радаров. Чтобы получать высокую разрешающую способность по азимуту, требуется физически большая антенна для фокусирования переданной и принятой энергии в острый луч. Острота луча определяет разрешающую способность по азимуту. Подобным образом, оптические системы, такие как телескопы, требуют широких апертур (зеркал или линз, которые аналогичны антенне радара) для получения высокого разрешения формирования изображения. Поскольку SAR работают на гораздо меньших частотах, чем оптические системы, даже средние разрешающие способности SAR требуют физически большей антенны, чем практически может переноситься бортовой авиационной платформой: часто требуются длины антенн протяженностью в несколько сотен метров. Однако бортовой авиационный радар мог бы собирать данные при пролете этого расстояния, а затем обрабатывать данные, как если бы они приходили с физически длинной антенны. Расстояние, которое пролетает летательный аппарат при синтезе антенны, известно как синтезированная апертура. Узкая синтезированная ширина луча является следствием относительно длинной синтезированной апертуры, которая дает более высокую разрешающую способность, чем возможно с меньшей физической антенны.
Тогда как этот раздел пытается обеспечить интуитивное представление, SAR не так просты, как описано выше. Даже для средних разрешающих способностей по азимуту, дальность цели до каждого места на синтезированной апертуре меняется вдоль по синтезированной апертуре. В SAR, энергия, отраженная от цели, должна «математически фокусироваться», чтобы компенсировать зависимость дальности в поперечном направлении апертуры перед формированием изображения. Когда апертура велика, SAR может давать разрешающую способность, близкую к длине волны радара, которая дает чувствительный фокус, и объекты будут пропадать в изображении SAR, если не сфокусированы надлежащим образом.
Однако, ранее известный SAR не может использоваться для подземного обнаружения, поскольку электромагнитная энергия не может проникать в землю в достаточной мере, а отражается на поверхности.
Поэтому остается необходимость в усовершенствованном радаре, который может использоваться для формирования подземного изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к устройству радара формирования подповерхностного изображения, содержащему узел передачи и узел приема. Узел передачи является выполненным с возможностью передавать первый радиоволновый сигнал в лепестке на выбранный участок земли под выбранным углом θ места, близким к горизонтальной плоскости на участке земли, так что значительная часть энергии в вертикально поляризованном сигнале, относительно земли, улавливалась в поверхностном типе волны, которая последовательно отводится преломлением в участок земли. Здесь участок земли является настолько малым, что кривизной Земли можно пренебречь, так что участок земли может быть аппроксимирован горизонтальной плоскостью.
Предпочтительно, чтобы по меньшей мере 10% энергии первого сигнала преломляется на участок земли, поскольку было доказано, что устройство радара согласно изобретению демонстрирует хорошую эффективность для случая, когда по меньшей мере 10% энергии первого сигнал преломляется на участок земли. В качестве примера эксперименты показали, что устройство радара согласно изобретению с углом наклона θ=1 относительно участка земли имеет преломление энергии 25% в землю у первого сигнала.
Оптимальным углом θ является так называемый угол Брюстера, который будет дополнительно пояснен ниже. Согласно приведенному выше устройство радара не ограничено углом Брюстера, но устройство радара может использоваться в диапазоне, заключающем в себе угол Брюстера. Однако под углом Брюстера 100% энергии в первом сигнале преломляется в землю.
Узел передачи выполнен с возможностью передавать первый сигнал в виде сигнала, являющегося поляризованным, по отношению к земле, так что большая часть энергии первого сигнала преломляется в землю. Узел передачи выполнен с возможностью передавать первый сигнал с длиной волны, являющейся большей, чем размер выбранных объектов над поверхностью, но достаточно короткой для обнаружения выбранных объектов, являющихся подповерхностными. Узел передачи выполнен с возможностью передавать первый сигнал с большой относительной шириной полосы частот, являющейся большей, чем 10% центральной частоты первого сигнала, для высокой разрешающей способности по дальности. Устройство радара является ограниченным по разрешающей способности длиной волны радаром с синтезированной апертурой, обладающим разрешающей способностью по азимуту, близкой к или идентичной длине волны первого сигнала, для того чтобы получать высокое разрешение по азимуту.
В одном из вариантов осуществления изобретения полоса частот является большей, чем 10% центральной частоты первого сигнала для высокой разрешающей способности по дальности, когда частота выше 200 МГц.
В другом варианте осуществления изобретения полоса частот является большей, чем 25% центральной частоты первого сигнала для высокой разрешающей способности по дальности, когда частота находится между 50 МГц и 200 МГц.
Узел приема выполнен с возможностью принимать второй сигнал, являющийся первым сигналом, отраженным от выбранного участка земли.
Устройство радара преимущественно является радаром с синтезированной апертурой, SAR, но с отличием от предшествующего уровня техники в том, что SAR согласно настоящему изобретению является ограниченным по разрешающей способности длиной волны радаром с синтезированной апертурой для получения разных изображений на разной диэлектрической глубине под земной поверхностью, дающим формирование трехмерных изображений участка земли. SAR согласно изобретению работает на пределе длины волны, то есть на дифракционном пределе. Технология ограниченного по дифракции SAR для максимальной разрешающей способности по азимуту, то есть близкой к длине волны первого сигнала, известна по так называемым устройству и способу CARABAS, описанным в SE 456117, SE 468184 и SE 511952. Документы преподают, что, если устройство радара работает с разрешающей способностью по азимуту, близкой к длине волны, достигается малая глубина поля, которая может использоваться для формирования трехмерных изображений. Этот способ, используемый вместе с заявленными признаками, дает требуемое формирование подповерхностного изображения.
SAR согласно настоящему изобретению не использует горизонтально поляризованные сигналы, но узел передачи выполнен с возможностью передавать первый сигнал в виде сигнала, являющегося поляризованным по существу перпендикулярно участку земли, то есть поляризованного вертикально.
Вертикально поляризованный сигнал может достигаться использованием передающей антенны, монтируемой на наземном транспортном средстве или на летательном аппарате. В последнем случае летательный аппарат может лететь под углом к земле, то есть при взлете или посадке, который обеспечивает то, что передающая антенна будет передавать поляризованный сигнал, являющийся поляризованным не точно перпендикулярно земле, а плюс или минус несколько градусов от 90°. Функциональный показатель устройства радара, в таком случае, будет уменьшен, но устройство радара будет по-прежнему в действии.
Как упоминалось раньше, угол θ места относительно участка земли будет в угловом интервале, содержащем угол Брюстера, а наиболее предпочтительно, близким к или в точности углом Брюстера. Угол θ может до некоторой степени отклоняться от угла Брюстера, поскольку отличия между вертикальной и горизонтальной поляризацией, что касается преломления, присутствуют в довольно большом угловом интервале вокруг угла Брюстера. Наибольшее отличие между вертикальной и горизонтальной поляризацией предназначено для угла θ места в интервале между 0 и 40°, а наиболее очевидно для угла θ в интервале между 0 и 20°.
Использование SAR сопровождается низким уровнем полета, который дает малые углы наклона цели, то есть низкое наклонение, дающее небольшие углы места, использование вертикальной поляризации является требованием для достижения как подсветки на реальной поверхности земли (предпочтительнее, чем при некоторой доле длины волны над поверхностью), так и для получения преломления в землю. Падение под углом Брюстера является максимизирующим ответный сигнал поверхностной/подповерхностной цели по отношению к таковому от объектов, приподнятых от земли.
Как было изложено выше, устройство радара может устанавливаться на летательный аппарат. Устройство радара, в таком случае, может содержать приемопередатчик, содержащий передатчик и приемник. Передатчик может содержать передающую антенну с вертикальной протяженностью в менее чем половину длины волны передаваемого первого сигнала, поскольку обладающее признаками изобретения устройство радара предусматривает достаточно короткую дальность.
Касательно распространения поверхностной волны ранее делался вывод, что для конечной проводимости почвы, возбуждение вертикально поляризованного сигнала с электрическим полем, наклоненным под углом Брюстера, приводило к процессу преломления, создающему сигнал поверхностной волны, отводящийся непрерывным преломлением в землю, но без какой бы то ни было составляющей отражения. Этот вывод является существенным в отношении практической трудности размещения низкочастотной вертикально поляризованной антенны, расположенной на борту бортовой авиационной платформы SAR. Не требуется, чтобы передающая антенна имела вертикальную протяженность в более чем половину длины волны, которая в нашем случае составляет приблизительно 1 метр. Однако даже эта длина могла бы быть беспокойством для небольшой бортовой авиационной системы, смонтированной, например, на UAV (беспилотном воздушном судне). Тот факт, что сигнал радара может быть поверхностной волной после преломления, может использоваться для реализации радара формирования подповерхностного изображения компоновкой с разнесенными передатчиком и приемником. В такой компоновке передающая антенна может быть близкой к земле и возбуждать поверхностную волну.
В другом варианте осуществления передающая антенна монтируется на наземное транспортное средство, движущееся на средней скорости в направлении оси х. Будучи смонтированной на транспортном средстве, передающая антенна может быть наклонена под углом Брюстера и тянуться вертикально на несколько метров, чтобы сделать излученный луч вертикально узким и преобразование излученной энергии в поверхностную волну эффективным. Принимающая антенна может быть меньшей, чем передающая антенна, и может иметь вертикальную протяженность, меньшую чем половина длины волны и, таким образом, может легко устанавливаться на летательный аппарат, такой как беспилотное воздушное судно, UAV, или вертолет. Летательный аппарат и, соответственно, приемник, в таком случае, в типичном применении движется зигзагообразным образом над передающим наземным транспортным средством, охватывая синтезированную апертуру амплитудой зигзагообразного движения. Летательный аппарат имеет большую скорость, чем наземный, который допускает зигзагообразное движение. Летательный аппарат летает прямолинейно с как можно более резкими разворотами.
Настоящее изобретение может быть обобщено использованием ограниченного по дифракции SAR, дающим больший угол интегрирования и малую глубину поля, которые служат причиной того, что энергия от подземных целей фокусируется независимо на разных глубинах, чтобы дать возможность формирования (трехмерных) 3D-изображений. Устройство радара согласно изобретению должно реализовываться, учитывая следующие параметры:
1. Выбор надлежащей геометрии подсветки, то есть угла θ места.
2. Надлежащее использование обработки низкочастотного ограниченного по дифракции SAR, для получения формирования 3D-изображений.
3. Выбор уместно низкой частоты радара. Экспериментально было показано, что частоты в диапазонах 100-200 МГц демонстрируют хорошую эффективность.
Низкая частота служит причинной того, что земная поверхность становится сглаженной по сравнению с длиной волны. Часть сигнала, в таком случае, распространяется вдоль поверхности, а часть сигнала проникает в землю под крутым углом и с гораздо более короткой длиной волны, которая служит причиной того, что подземные, подповерхностные цели, в несколько раз меньшие, чем длина волны, могут обнаруживаться радаром.
Если бы должна была использоваться высокая частота, земная поверхность казалась бы хаотической в сравнении с длиной волны. Сигнал отражался бы от земной поверхности во всех направлениях. Эти сигналы имеют тенденцию ослеплять радар в отношении подземных ответных сигналов, а потому не должны использоваться.
Ниже приведена таблица для разных земных материалов. Таблица не является исчерпывающей, а просто предлагает разные примеры.
Показатель преломления для земли является важным, так как (длина волны) λ в пространстве делится на показатель преломления для расчета λ в земле. Типичным значением для показателя преломления для земли является 5.
Оптическая неравномерность: трава, небольшие валуны и т.п. служат причиной того, что среднеквадратическая, RMS, высота должна быть меньшей, чем например λ в пространстве/8. λ в пространстве является длиной волны в воздухе.
Чувствительность небольшой цели: λ в земле/2>0,2 м дает λ в пространстве с длиной волны в 2 м, которая предусматривает среднеквадратическую неровность земли в 0,25 м и подповерхностные цели >0,2 м. λ в земле является длиной волны в земле.
Подповерхностные объекты около 0,2 м являются сильными отражателями, поскольку они являются резонирующими с падающим излучением. Более того, подповерхностные цели часто являются металлическими объектами, являющимися лучшими отражателями, чем менее плотная среда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет описано ниже в связи с некоторым количеством чертежей, на которых:
Фиг.1 схематически иллюстрирует траекторию полета летающего объекта, содержащего устройство радара согласно изобретению;
Фиг.2а и 2b схематически иллюстрирует сравнение между горизонтально поляризованным лучом и вертикально поляризованным лучом;
Фиг.3 схематически иллюстрирует график коэффициента прохождения в качестве функции угла наклона цели для горизонтальной (сплошная линия) и вертикальной (пунктирная линия) поляризации;
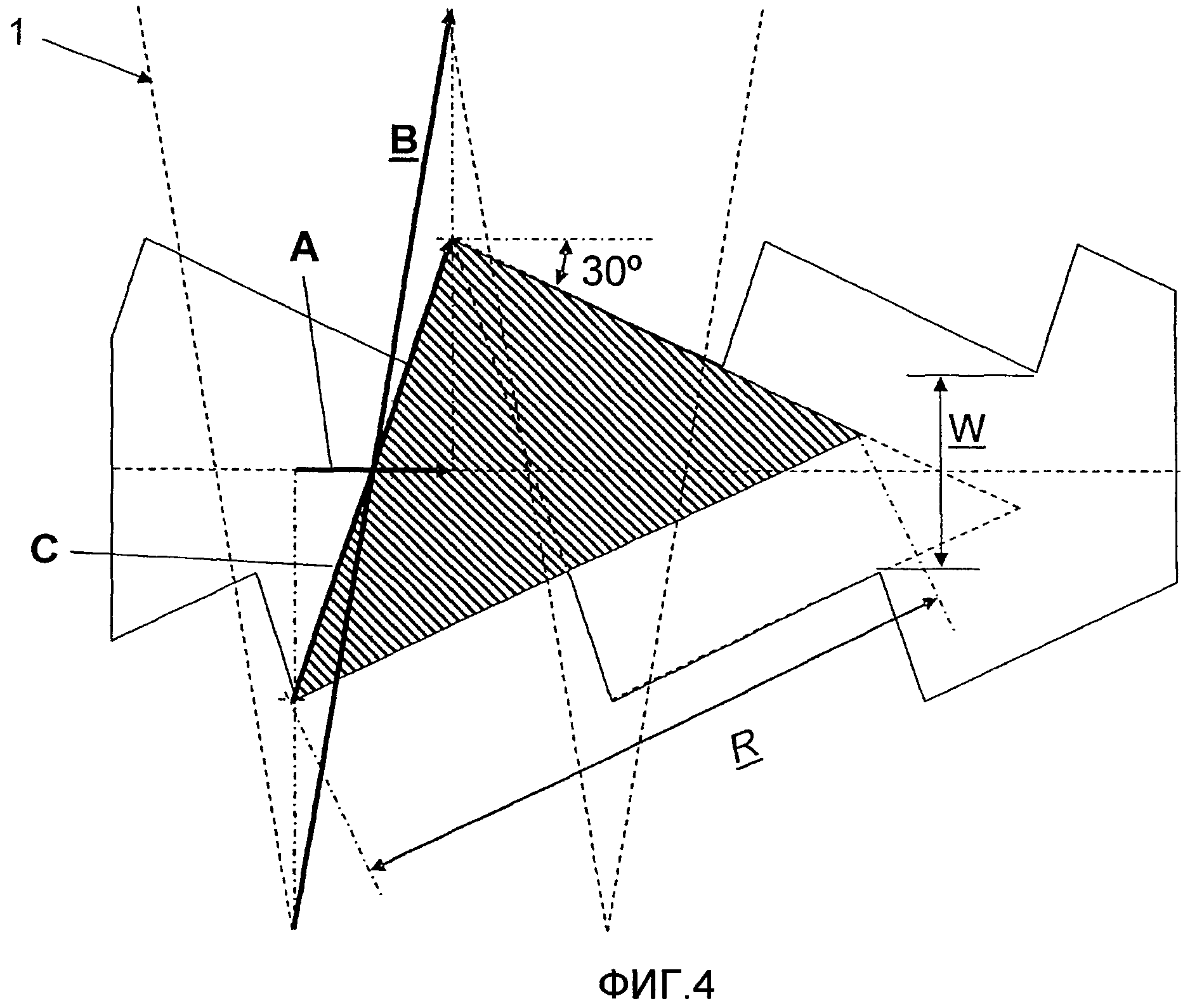
Фиг.4 схематически иллюстрирует поверхность (белый участок), покрываемую компоновкой с разнесенными передатчиком и приемником согласно изобретению;
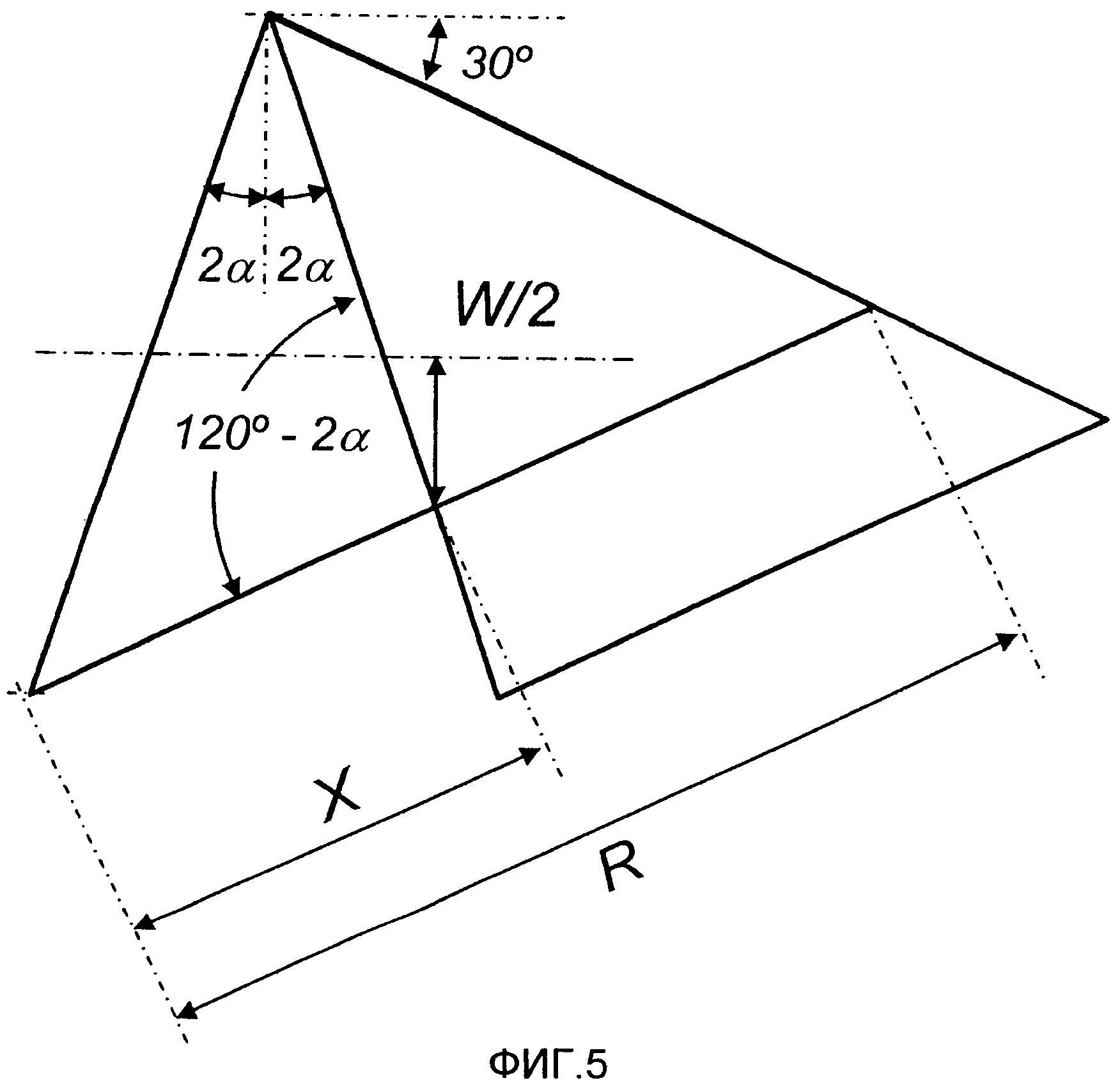
Фиг.5 схематически иллюстрирует геометрическое отображение хода событий, и на которых,
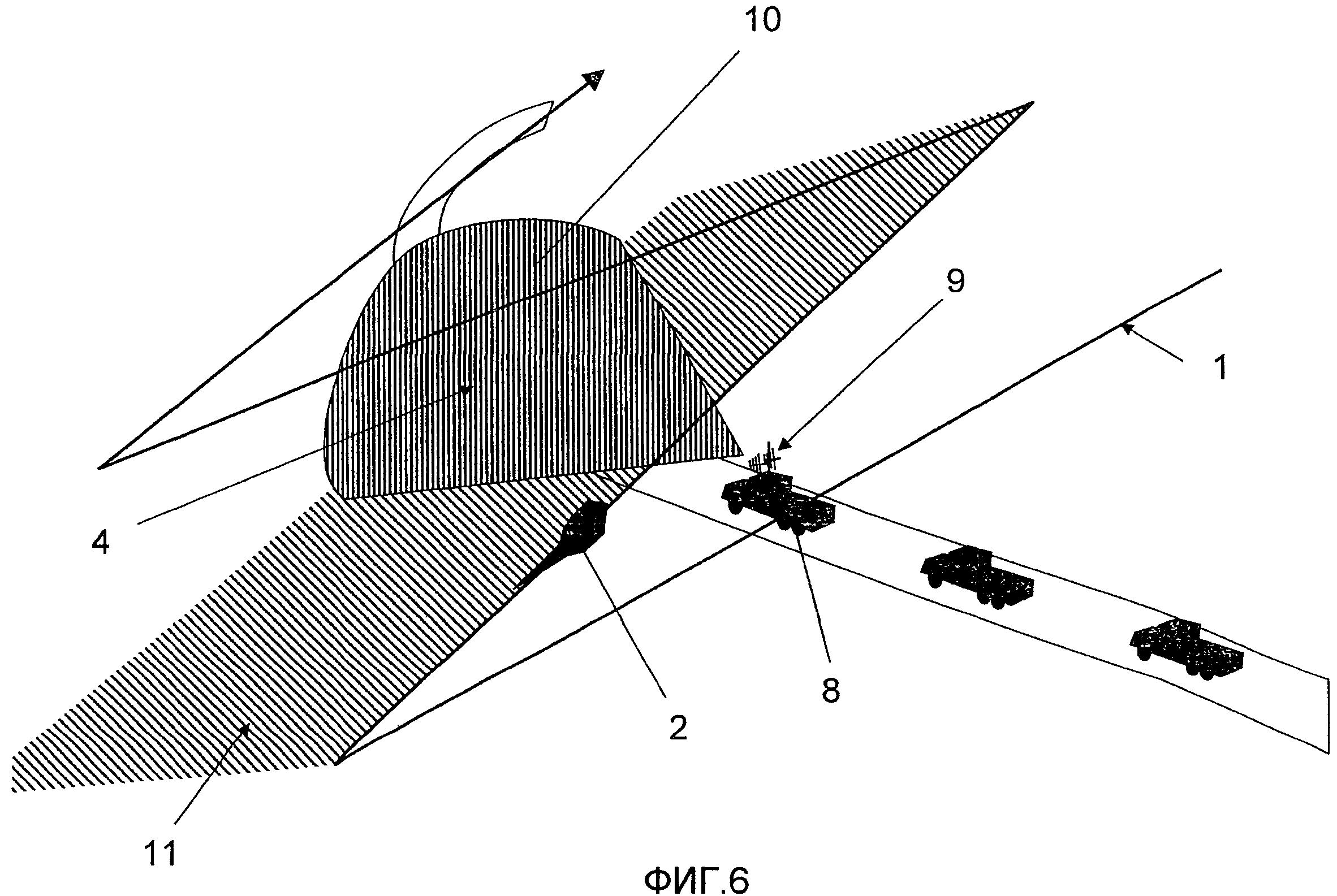
Фиг.6 схематически иллюстрирует радар согласно изобретению, используемый в сочетании наземного транспортного средства и воздушного транспортного средства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг.1 схематически иллюстрирует траекторию 1 полета летательного аппарата 2, содержащего устройство радара согласно изобретению. Летательный аппарат 2 может быть вертолетом или самолетом либо любым другим подходящим летающим объектом, который может нести оборудование радара согласно изобретению. Фиг.1 показывает, что передатчик радара передает вертикально поляризованный луч 3 на выбранный участок 4 земли при полете по зигзагообразной схеме.
Фиг.1 показывает основной принцип системы, где подземная цель 5 дает ответный сигнал цели на поверхности 6 участка 4 земли в виде полукруга 7. В каждый момент регистрации SAR ответный сигнал от цели смешивается с другими отражениями в том же самом диапазоне измерения электрической величины. Фиг.1 указывает, что вследствие большого угла интегрирования и пологого угла наклона цели энергия цели может перефокусироваться для предоставления возможности формирования 3D-изображений.
Фиг.2а и 2b схематически иллюстрируют сравнение между горизонтально поляризованным лучом H-pol и вертикально поляризованным лучом V-pol.
Фиг.2а иллюстрирует, что горизонтально поляризованный луч H-pol отражается по существу во всей своей полноте. Горизонтально поляризованный луч H-pol должен быть наклонен с углом θ места, являющимся более острым, чем 40°, или вся переданная энергия будет переходить в поверхностное отражение, смотрите фиг.3.
Фиг.2b показывает, что для вертикально поляризованного луча V-pol под углом θ места, являющимся углом Брюстера, геометрия подсветки может быть сконфигурирована так, что полный сигнал запускался в землю посредством преломления, смотрите фиг.3. Этот процесс поддерживается составляющей приземной волны, если поверхность является проводящей.
Фиг.3 схематически иллюстрирует график коэффициента прохождения как функцию угла наклона цели для горизонтальной поляризации (сплошная линия) и вертикальной поляризации (пунктирная линия). Строгое требование для вертикально поляризованного излучения, когда угол формирования изображения, то есть угол θ места становится пологим, очевидно в виду фиг.3. Фиг.3 показывает, что угол θ места может в некоторой степени отклоняться от угла Брюстера, поскольку различия между вертикальной и горизонтальной поляризацией в отношении преломления присутствуют в довольно большом угловом интервале вокруг угла Брюстера. Наибольшее отличие между вертикальной и горизонтальной поляризацией имеет место для угла θ в интервале между 0 и 40°, а наиболее очевидно для угла θ в интервале между 0 и 20°. Поэтому подходящий угол находится в диапазоне плюс минус 5-10° около угла Брюстера. Этот пологий угол наклона цели является признаком, что устройство радара должно быть помещено близко к земле для работы на ближней дальности.
Фиг.4 схематически иллюстрирует поверхность (белый участок), покрываемую компоновкой с разнесенными передатчиком и приемником, изображенной на фиг.6. Обсуждаемая область изображена одним отрезком В при зигзагообразном перемещении приемника. Во время движения приемника по В передатчик движется по А. Результирующее движение фазового центра происходит по С. R - средняя максимальная дальность для передатчика и приемника. Она будет задаваться максимальной дальностью, для которой распространение поверхностной волны может ожидаться для радарной подсветки.
Пример: В: 20 м/с; А: 4 м/с; С: 240 м; W: 107 м.
Фиг.5 схематически иллюстрирует геометрическое отображение хода событий. Доля прямоугольного наблюдения определяется «сужением», образуемым треугольными зонами покрытия от двух соседних плеч приемника. Действительно половиной ширины W/2 является расстояние от траектории передающего транспортного средства до точки сужения.
Фиг.6 схематически иллюстрирует устройство радара согласно изобретению, используемое в сочетании наземного транспортного средства 8 и летательного аппарата 2. На фиг.6 показано, что передатчик содержит передающую антенну 9, являющуюся смонтированной на наземном транспортном средстве 8. Передающая антенна 9 передает вертикально поляризованный первый сигнал (луч 3 на фиг.1) в виде лепестка 10 на выбранный участок 4 земли перед наземным транспортным средством 8. Передающая антенна 9 предпочтительно наклонена к земле под углом Брюстера, являющимся зависимым от показателя преломления земли. Летательный аппарат 2 летает по зигзагообразной схеме 1 для того, чтобы увеличить синтезированную апертуру ранее описанного SAR. Летательный аппарат 2 содержит приемник, содержащий приемную антенну (не показана) для приема информации во втором лепестке 11. Принимаемый лепесток 11 преобразуется во второй сигнал, являющийся используемым для дополнительной сигнальной обработки при формировании подповерхностного изображения.
Последующий текст должен читаться в связи со всеми фигурами 1-6.
Принцип ограниченного по дифракции радара с синтезированной апертурой является известным способом для получения высокого 2-мерного разрешения поверхности земли. Однако способ должен быть изменен согласно изобретению, чтобы он работал для формирования подповерхностного изображения. Для того чтобы сделать его полезным, он требует конфигурацию радара с направлением излучения, довольно близким к плоскости земли, с тем чтобы раскладывать поверхность земли. Глубина подповерхностного объекта будет выявляться малой глубиной фокуса ограниченного по дифракции SAR, прямо как в микроскопии.
Основой для преломления излучения в землю является закон преломления Снелля.

(где угол имеет значение относительно земли, которая предполагается горизонтальной). Закон Снелля является дополняемым уравнениями Френеля для коэффициента ρ преломления. Для вертикальной/горизонтальной поляризации (электрического поля) он соответственно составляет:


Суммой коэффициентов отражения и преломления является единица.
Типичный показатель преломления для земли может быть n = 5, по которому на фиг.3 показан коэффициент прохождения. Угол, для которого коэффициент прохождения является единицей для вертикально поляризованного сигнала, называется углом Брюстера. Для угла Брюстера таковой составляет согласно (1.1) и (1.2)
Из графика на фиг.3 очевидно, что для почти вертикального угла наклона коэффициенты пропускания и отражения имеют одинаковую величину. Таким образом, для излучения, вертикально падающего на землю, будет потеря мощности приблизительно 50%. Одинаково большая потеря будет для сигнала, отраженного подповерхностным объектом при повторном прохождении границы раздела земля-воздух, то есть будут общие потери в 75%. Для зондирующего землю радара с антенной прямо над землей эти фигуры могут быть приемлемыми, так как ответный сигнал земли может выделяться посредством сжатия импульсов. Для радара дальнего действия, смотрящего на землю с высоты, ответный сигнал земли не может быть выделен вследствие криволинейной природы волнового фронта, наталкивающегося на поверхность земли по краям в тот же самый момент времени, когда центр находится на требуемой глубине. Поэтому такая конфигурация радара будет не самой полезной.
Так как упомянутый SAR полагается на пологие углы наклона и, таким образом, будет весьма неэффективным для подповерхностного зондирования, если поляризован горизонтально. Как видно из графика, ситуация будет другой для вертикально поляризованного сигнала. Действительно, если угол Брюстера используется в качестве угла понижения, вся мощность будет преломляться в землю. Обратимость - применимая по меньшей мере до той степени, что земля не имеет потерь, будет гарантировать, что сигнал не будет преломляться земной поверхностью, когда он рассеивается обратно от подповерхностной цели.
Длина λ волны радара должна выбираться по двум условиям:
1. Она должна быть достаточно короткой, чтобы помещать подземные объекты, которые должны обнаруживаться, выше области рэлеевского рассеяния, что касается длины волны в земле (объекты, которые должны обнаруживаться, должны иметь линейный размер по меньшей мере λ/2n).
2. Она должна быть достаточно большой, чтобы не сильно ослаблять поле, падающее на верхние слои земли явлениями затенения, вызванными неровностями земли (неровность земли должна иметь характеристический линейный размер не более чем в λ/8).
Например, для плоских открытых полей λ≈2 м может быть пригодным выбором длины волны. Это предполагает, чтобы трава, небольшие булыжники и тому подобное, в целом, имели протяженность, меньшую чем 0,3 м.
С прохождением в поверхность длина волны укорачивается согласно показателю n преломления, то есть приблизительно в пять раз для n = 5. Таким образом, длина волны 2 м могла бы быть резонансной для подземных объектов протяженностью в 0,2 м.
Поверхностная волна Зенека:
Распространение волны вдоль земной поверхности под углом Брюстера является специфическим и заслуживает подробного рассмотрения для того, чтобы было дано более точное предложение по конструкции радара. Так как оказывается, что явления распространения являются близкими к электромагнитным поверхностным волнам в понимании Зенека. Коль скоро диэлектрик обладает некоторой степенью проводимости, распространение волны под углом Брюстера будет поддерживать поверхностную волну с определенным свойством, что она не вызывает никакой отраженной волны. В случае земной среды действительно без потерь поверхностная составляющая будет отсутствовать и будет происходить процесс безотражательного преломления.
Рассмотрим полупространство z≤0 с проводимостью k и диэлектрической проницаемостью ε и допустим, что z>0 будет вакуумом с нулевой проводимостью и диэлектрической проницаемостью ε0.
Допустим, что взятое в целом пространство является немагнитным с магнитной проницаемостью µ0. Вопрос, который будет здесь освещен, состоит в том, существует ли излучение, ограниченное плоскостью x-y, то есть без свободной составляющей излучения как в направлении z, так и в направлении -z.
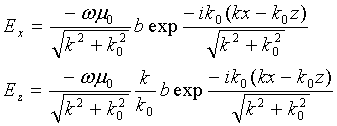
Будем предполагать распространение в плоскости x-z, то есть с магнитным полем с одной не обращающейся в нуль составляющей Hy(x,z). Могут быть две электрические составляющие Ex(x,z) и Ez(x,z). Не обращающиеся в нуль части разделенных по времени уравнений Максвелла показывают для z≤0.

каковое означает:

Это обеспечивает решение для z≤0.

Где:

Так как решение должно быть волной, ограниченной и распространяющейся вдоль плоскости z = 0, она должна затухать для z → -∞, поскольку

Отметим, что k0 является вещественным и фактически волновым числом разделенного по времени уравнения Максвелла. Однако мы не вольны ставить условие, что это волновое число представляет плоскую волну. Волна должна затухать для z→∞, значит,

Электрические поля определяются по (2.1). Для z≤0.
и, таким образом,

Для z>0.

Таким образом,

Граничные условия таковы, что тангенциальные составляющие поля должны быть непрерывными при переходе z→0. Таким образом,
составляющая Hy:

составляющая Ex:

Следует, что

Более того, следует, что:
поскольку противоположные знаки корня должны выбираться согласно (2.11). Подставляя (2.11), (2.12) в (2.3) и (2.5), получаем:

Когда k и k0 являются вещественными и положительными (что в действительности будет выглядеть приблизительно верным), (2.13) представляет распространение волны, направленной вдоль волнового вектора (k0, -k) для z ≤ 0 и волнового вектора (k, -k0) для z>0. Оба направления находятся в четвертом квадранте плоскости x-z.
Амплитуды электрического поля для z ≤ 0 становятся согласно (2.7),

Видно, что

Для z>0 (2.9) означает:
Вновь видно, что
Давайте подставим волновые числа для частоты и материальные константы. Получаем:

где были введены скорость света




Таким образом,

Амплитуды магнитного поля, таким образом, могут быть повторно выражены:

Из которых легко выводятся амплитуды электрического поля. Давайте рассмотрим случай, когда k= 0, то есть λс→ ∞.

Очевидно в этом случае,
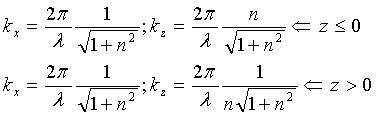
Обнаруживается, что над и под землей решение создает плоские волны с волновыми числами:
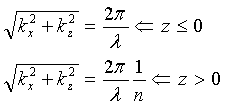
Распространение происходит под углом места θ = tan-1kz/kx, то есть под углом θ = tan-1 1/n для z>0 и под углом θ = tan-1n для z≤0. Закон дифракции Снелля удовлетворен, что очевидно из совпадения составляющих волнового числа kx над и под землей.
Материальные константы для некоторых типов земли
Поскольку n>>1 во всех случаях, можно приблизительно записать:
Обнаруживается, что до этого приближения волна Зенека не является затухающей в направлении оси x. Этот результат является зависимым не от проводимости, а от величины показателя преломления.
Для длин волн не более чем в несколько метров, λ/λс будет небольшим, в каковом случае, согласно разложению в ряд Тейлора, можно записать:

Снова видно, что волна Зенека должна иметь характер плоской волны, удовлетворяя закону преломления Снелля, несмотря на то, что она является затухающей в направлении оси z. Поскольку n >> 1, распространение происходит под пологими углами наклона цели над землей. Так называемый угол Брюстера является углом идеального диэлектрика, под которым совсем не происходит преломление на горизонтальной поверхности для вертикально поляризованного излучения. Он задан согласно:

Таким образом, видно, что по мере того как λ/λс→0, волна Зенека становится плоской волной, полностью преломляемой в землю, или (по теореме взаимности) плоской волной, выходящей из земли без преломления на границе.
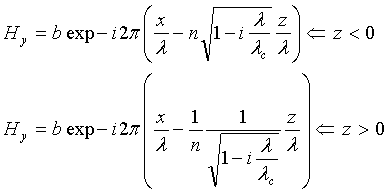
Полагая, что λ/λс≠0 и n<∞, видно, что волна Зенека будет затухать в направлении оси x. Обнаруживается мнимая составляющая самого малого порядка в знаменателе экспонент по (2.17).

Отсюда, вместо (2.21):

В силу этого получаем четыре интересующих параметра приземной волны Зенека, то есть наклон волны tan-1 1/n, характеристическую глубину λс/n проникновения, характеристическое удлинение nλc в вакууме и характеристическую дальность n2λc распространения. Для материалов, приведенных выше − кроме морской воды − приближение λ<<λс будет применимо, и мы получим:
Анализ делает очевидной физическую интерпретацию волны Зенека. Он может быть обобщен, как изложено ниже. Под углом Брюстера волна, падающая на землю по определенной линии распространения, не будет иметь никакой составляющей отражения, если есть идеальное согласование полных сопротивлений, значит, волна будет полностью преломляться в землю, с линией распространения, изгибающейся согласно закону преломления Снелля. Однако согласно граничным условиям составляющая электрического поля уменьшается в процессе преломления, смотрите уравнения (2.14) и (2.15). Поток электромагнитной энергии (вектор Пойнтинга), таким образом, будет резко снижаться вдоль электромагнитной линии распространения, когда он попадает в земную поверхность. Энергетическое равновесие не может быть сохранено, если оставшаяся мощность является источником для рассеяния падающей волны на большие значений x по земной поверхности. Мощность падающей волны, таким образом, будет уменьшаться экспоненциально с ростом значений x.
Конструкция радара формирования подповерхностного изображения
На основании предшествующих теоретических результатов могут быть даны общие аспекты конструкции радара для радара формирования подповерхностного изображения.
Возможная подповерхностная цель считается содержащей металл и с протяженностью по меньшей мере в λ/n≈0,2 м. Это будет обеспечивать полное, хотя, может быть, диффузное рассеяние падающего сигнала радара. Элементы естественных подповерхностных помех, таких как камни и корни деревьев, будут иметь свойства преломления, подобные самой почве. Природная земля в гомогенных структурах также - главным образом - будет встречаться с меньшими масштабами длин, чем таковые истинных целей. По этим причинам подповерхностная помеха должна давать более слабое обратное рассеяние, чем истинные цели. Чтобы этот эффект был полезен для подавления ложной тревоги, разрешающая способность радара должна быть высокой настолько, что отдельные рассеивающие элементы, будь они целями или помехами, обычно изолировались бы в пределах элементов разрешения, таким образом, избегая гранулярных шумов. Следовательно, должна достигаться разрешающая способность радара, близкая к длине волны радара.
Полагая неподвижность подповерхностных целей, принцип SAR пригоден для достижения этой высокой разрешающей способности. Согласно тому же объяснению, что и для обыкновенного SAR, взятый в целом подповерхностный объем может быть представлен в качестве отражающей непрерывной среды, для которой каждая точка Р рассеивает независимо, и во всех направлениях с интенсивностью f(P), определенной по величине процедурой формирования изображения SAR.
Здесь F(r,t) - импульсный сжатый сигнал радара, тогда как

Для подповерхностных рассеивателей только направления обратного рассеяния в пределах угла sin-1(1/n) вокруг нормали к земле будут преломляться по границе раздела земля/воздух и вызывать отраженный радиолокационный сигнал. К тому же, рассеянный сигнал из под земли снижается отражением, проходя через земную поверхность.
Как видно на фиг.3, потери на подповерхностное отражение очень сильно подавляются поляризацией. Это особенно важно в современных приложениях с большим коэффициентом наблюдения, где угол наклона цели должен быть небольшим. При углах наклона цели, типичных для SAR, использование вертикальной поляризации представляется требованием для достижения как подсветки по реальной земной поверхности (предпочтительнее, чем на некоторой доле длины волны над поверхностью), так и для получения преломления в землю. Падение под углом Брюстера является максимизирующим ответный сигнал поверхностной/подповерхностной цели по отношению к ответному сигналу от объектов, приподнятых от земли. Для горизонтальной поляризации считается, что потери на 2-проходное отражение приводят к ослаблению в 20 дБ обратно рассеянного поверхностного/подповерхностного сигнала при падении под углом Брюстера.
Как упоминалось, ложные сигналы тревоги от помех должны быть устранены в процессе радарного обнаружения. Это может быть сделано любой или комбинацией трех широкоизвестных стратегий для обнаружения цели SAR:
1) Пороговая обработка интенсивности изображения для выявления сигналов тревоги только определенной силы.
2) Групповое обнаружение, например, сканирование изображения на систематические или индикативные шаблоны сигналов тревоги. Минное поле может быть типичным случаем для группового обнаружения.
3) Обнаружение изменения, со сравнением изображений по одному и тому же участку, зарегистрированных порознь по времени. Наблюдение за дорогами является типичными применениями.
Проблема в формировании подповерхностного изображения SAR заключается в том, что область, которая должна подвергаться формированию изображения, является 3-мерной, тогда как селекция по дальности и фокусирование SAR обеспечивают подавление только 2-мерной помехи. Как будет проанализировано далее − SAR, формирующий изображение с дифракцией или разрешающей способностью в длину волны, имеет свойство сокращенной глубины поля, которая может разрешать 3-мерные неоднозначности.
Расфокусировка изображений SAR может достаточно хорошо моделироваться допущением бесконечного показателя преломления. Таким образом, SAR с пологим углом наклона цели распространяет сигналы радара в (по существу) горизонтальной плоскости относительно точки поверх подземной цели, в каковой точке распространение становится направленным вертикально вниз, на цель. Пусть подземная цель расположена в точке P=(x, y, -z) вдоль оси х, и пусть тракт SAR проходит по оси y, то есть Qt=(0, vt, 0). «Радарной» дальностью от любой точки y в тракте SAR до подповерхностной цели будет:

Для коротких апертур SAR, близких к y = 0, можно заместить (3.2) на его приближение первого порядка:

Таким образом, принцип формирования изображения SAR будет приписывать равную амплитуду изображения любой паре точек изображения P=(x, y, -z) и P=(x-nδz, y, -z+δz). Следовательно, не будет средства проведения различия между подповерхностными и поверхностными ответными сигналами. Чувствительность к параметру z, однако, будет иметь место для больших апертур SAR. Действительно, беря интеграл (3.1) для точки P=(x-nδz, y, -z+δz), смещенной от фактического положения цели P'=(x, y, -z), интеграл будет начинать декоррелировать, если разность радарной дальности


Поскольку формирование изображения с разрешением в длину волны требует x≈vT, обнаруживается, что глубина поля δz≈λ/n. С приведенными значениями λ≈2 м и n≈5, обнаруживается, что δz≈0,4 м. Соответствующие результаты для конечного показателя преломления дали бы более сложные формулы, но не значительные отличия в отношении глубины поля.
Возможность 3-мерного различения, в качестве альтернативы, могла бы быть получена по более многочисленному набору исходных данных, чем у традиционного SAR. Например, направленность, достигаемая вертикально протяженной антенной SAR, в принципе, может давать 3-мерную разрешающую способность и, таким образом, проведение различия между наземными и подповерхностными ответными сигналами. Неразрешимое 3-мерное окружение любой подповерхностной цели будет содержать слой растительности над землей и любые другие подповерхностные ответные сигналы, опускающиеся до глубины проникновения сигнала. Слой растительности и глубина проникновения, однако, нечасто являются большими, чем несколько метров. Ввиду требуемой длины волны метрового размаха и расстояний до базы, требуемых для обширного наблюдения, следовательно, необходимо сделать вывод, что это требование по разрешающей способности вертикальной антенны является слишком строгим, чтобы быть достижимым исключительно разрешающей способностью, на которой работает реальная антенна.
Для подведения итога представляется, что наиболее важными аспектами касательно успешного радара формирования подповерхностного изображения являются 1) вертикальная поляризация и 2) разрешающая способность в длину волны для получения малой глубины поля, а также 3) выбор надлежащей длины волны. Использование точного угла Брюстера не так важно, поскольку отличия между вертикальной и горизонтальной поляризацией присутствуют в довольно большом угловом интервале вокруг угла Брюстера.
Ранее делался вывод, что для конечной проводимости почвы испускание вертикально поляризованного сигнала с электрическим полем, наклоненным под углом Брюстера, приводило к процессу преломления, создающему сигнал поверхностной волны, отводящийся посредством непрерывного преломления в землю, но без какой бы то ни было составляющей отражения. Этот вывод является значимым для практической трудности размещения низкочастотной вертикально поляризованной антенны, расположенной на борту бортовой авиационной платформы SAR. Для рассмотренных коротких дальностей, мощность передачи будет довольно малой, значит, для бортового авиационного радара не требуется, чтобы передающая антенна имела вертикальную протяженность в более чем половину длины волны, то есть в нашем случае около 1 метра. Однако даже эта длина была бы беспокойством для небольших бортовых авиационных систем, установленных, например, на UAV. Тот факт, что сигнал радара может быть поверхностной волной, может использоваться для реализации радара формирования подповерхностного изображения посредством компоновки с разнесенными передатчиком и приемником. В такой компоновке передающая антенна может быть близкой к земле и возбуждать поверхностную волну.
Передающая антенна типично могла бы монтироваться на наземном транспортном средстве, движущемся со средней скоростью в направлении оси x. Будучи установленной на транспортном средстве передающая антенна может быть наклоненной под углом Брюстера и вертикально протяженной на несколько метров, чтобы сделать излучаемый луч вертикально узким, а преобразование излученной энергии в поверхностную волну эффективным. Приемная антенна может иметь вертикальную протяженность, меньшую чем в половину длины волны, и, таким образом, может легко устанавливаться на UAV или вертолет. Принимающая платформа могла бы двигаться зигзагообразным образом над передающим наземным транспортным средством, покрывая синтезированную апертуру амплитудой зигзагообразного движения.
Формулой поверхностной разрешающей способности SAR является:
Где ∆θ − угол интегрирования, а В − ширина полосы пропускания. При условии, что центральная длина волны λс≈2 м, полоса пропускания в 100 МГц, дающая разрешающую способность по дальности в 1,5 м, представляется достижимой. Эта разрешающая способность должна подбираться согласно подобной разрешающей способности ∆θλс/2 по азимуту. Таким образом, ∆θ ≈ 60°.
Длина апертуры SAR указывает ссылкой на изменение местоположения фазового центра, которое, для компоновки с разнесенными передатчиком и приемником, является половиной амплитуды фактического расстояния, пройденного принимающей платформой. При условии, что характеристические дальности поверхностного распространения могут изменяться от 100 до 1000 метров, можно было бы ожидать, что дальность действия радара в 200 м будет практичной в большинстве применений, то есть даже если характеристическая дальность для распространения поверхностной волны составляет 100 м.
Участок, покрываемый зигзагообразным движением приемника, изображен на фиг.2. Обозначим длину перемещения фазового центра для одиночного плеча согласно B, тогда как А является размахом плеча. Таким образом,
где vx − составляющая скорости приемника в направлении оси х, а также наземная скорость передатчика. Можно допустить, что vx<<vy. Для треугольного (обсуждаемого) участка, изображаемого одним плечом, получается следующее требование для амплитуды зигзага:
Прямоугольная полоса, которая может быть вписана в покрываемый (имеющий неправильную форму) участок, является собственно полезной частью изображаемого участка. Поэтому его ширина W представляет интерес. По фиг.3 получаем:
Снова, принимая во внимание приближение первого порядка по α

Таким образом,
Например, если vx = 20 м/с (крейсерская скорость вертолетного UAV), а vy=2 м/с, получается α=0,1. В таком случае А=297 м и W=154 м согласно (3.7) и (3.10), соответственно. Скорость покрытия участка составляет 2 м/с × 154 м = 307 м2/с.
При условии, что глубина поля - 0,4 м - высота подземных объемов минимальных элементов отображения не должна быть большей чем 0,2 м. Для глубины проникновения 5 м земля, таким образом, должна быть нарезана на 25 подповерхностных слоев, каждый из которых обрабатывается с параметрами, скорректированными для соответствующей электрической глубины nz. При поверхностной разрешающей способности в 1,5 м горизонтальные размеры минимального элемента отображения могут быть 0,5 × 0,5 м. Апертура одного плеча пролетается за 297 м/20 м/с = 15 с. В течение этого времени суммарным количеством обрабатываемых минимальных элементов отображения будет 25×297/2×154/4=1,3×106. Частота выдачи минимальных элементов отображения составляет приблизительно 150 килопикселей/с. При условии 64-битного формата комплексной амплитуды частота выдачи данных, соответственно, составляет 9,8 Мбит/с - приемлемо низкий показатель.
Есть некоторое количество важных практических вещей для этого типа радара. Прежде всего есть выбор формы сигнала, которая является критическим объектом вследствие большой требуемой полосы пропускания и малой дальности действия. Один из возможных режимов работы происходит посредством создания формы сигнала импульсным устройством (например, лавинным диодом), с длительностью передачи, равной обратной величине ширины полосы пропускания. Эти устройства типично выдают среднюю мощность в режиме, требуемом для зондирующего землю радара, GPR. Для SAR расширенное время интегрирования уравновешивает рассеяние излученной энергии по гораздо большему участку, поэтому потребляемая мощность могла бы быть подобной таковым у GPR. Таким образом, импульсные формы сигнала могут быть возможными кандидатами для формы сигнала. Однако импульсные формы сигнала требуют оцифровки по меньшей мере при 200 МГц, каковая частота по существу слишком высока для передачи данных ради последующей сигнальной обработки.
В качестве возмещения пригодны формы сигнала ступенчатой частоты. Они требуют ступенчатой полосы пропускания, широкой настолько, чтобы предоставить возможность коротких импульсов для малой дальности действия. Однако импульсы длиной в 15 м могут быть вполне приемлемыми с точки зрения работы, давая возможность ступенчатой полосы пропускания в 10 МГц, то есть 10 ступеней перестройки частоты по полосе пропускания радара. Импульсные устройства также могут использоваться для работы на ступенчатой частоте, но для 10 ступеней будут рассеивать 90% мощности вне принимаемой полосы. Для энергосберегающей работы должно достигаться быстрое переключение передачи/приема линейного передатчика, то есть переключение несущей 200 МГц с временами переключения порядка 50 нс.
Вторая практическая вещь состоит в снижении неопределенностей передвижения в конфигурации SAR. Должны быть известны как движение передающей наземной платформы относительно земли, так и относительное движение между авиационной принимающей и наземной передающей платформой. Для формирования изображения SAR точность осведомления о движении должна быть в пределах некоторой доли длины волны - скажем, среднеквадратического значения в 0,3 м.
Тот факт, что наземная платформа имеет контакт с землей, делает точное определение ее перемещения по земле возможным посредством нескольких способов, например, технологий лазерного детектирования перемещения. Относительное движение между наземной и авиационной платформами является более простым для оценки, чем абсолютное движение. Это, в частности, так, поскольку расстояние между платформами не очень велико. Одним из возможных вариантов является глобальная система определения местоположения (GPS) с перепадом по несущей, посредством которой, возможно, может быть достижимой требуемая высокая относительная точность. Также существуют другие варианты выбора, например устройства передвижения по лучу, где авиационная платформа может воспринимать отклонение от линейной траектории полета, проложенной лазерным лучом с наземной платформы.
Реферат
Настоящее изобретение может быть обобщено использованием ограниченного по дифракции радара с синтезированной апертурой (SAR), дающего большой угол интегрирования и малую глубину поля, которые служат причиной того, что энергия от подземных целей фокусируется независимо на разных глубинах, чтобы дать возможность формирования 3D-изображений. Устройство радара согласно изобретению должно реализовываться, учитывая следующие параметры: выбор подходящей геометрии подсветки, то есть угла и места, и подходящего использования обработки низкочастотного ограниченного по дифракции SAR для получения 3D-изображений, и выбор соответственной низкой частоты радара. Достигаемый технический результат изобретения - повышение точности формирования подземного изображения. 2 н. и 40 з.п. ф-лы, 6 ил., 1 табл.
Формула
Документы, цитированные в отчёте о поиске
Способ формирования радиолокационного изображения объекта и устройство формирования радиолокационного изображения
Комментарии