Способ и система определения траектории сверхзвукового снаряда - RU2358275C2
Код документа: RU2358275C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к техническим решениям для правоохранительных органов и служб безопасности и более конкретно к способам и системам для определения положения начальной точки сверхзвукового снаряда и направления его полета. Способы и системы обеспечивают определение и устранение неоднозначности положения точки выстрела даже для больших расстояний между точкой выстрела и датчиком, и когда отсутствует сигнал дульной волны, или этот сигнал очень слаб.
ПРЕДПОСЫЛКИ ДЛЯ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Известны системы и способы, с помощью которых можно определить обобщенное направление и траекторию пущенного сверхзвукового объекта, например пули или артиллерийского снаряда (далее "снаряд"), измеряя параметры ударной волны, создаваемой таким пущенным объектом. Одна из таких систем, описанная в патенте США №5241518 содержит по меньшей мере три разнесенных датчика, каждый из которых содержит три акустических преобразователя, лежащих в некоторой плоскости. Приняв ударную волну, датчики вырабатывают сигналы, содержащие информацию, относящуюся к азимуту и углу возвышения точки возникновения ударной волны. Измерения параметров только ударной волны не позволяют определить расстояние между датчиком(ами) и точкой возникновения ударной волны. Информацию о дальности до точки выстрела обычно получают по вспышке на дульном срезе или по сигналу дульной волны.
Азимут и угол возвышения точки выстрела по отношению к положению датчика в большинстве случаев определяют, измеряя каждым датчиком время прихода дульной волны и ударной волны. Волны приходят в каждый датчик в разное время, и датчики вырабатывают сигналы, соответствующие давлению ударной и дульной волн. Обрабатывая сигналы от разных датчиков, можно определить направление (азимут и угол возвышения) от датчика на точку возникновения дульной и ударной волн и, соответственно, траекторию полета снаряда.
В известных системах используются микрофоны, которые могут быть размещены сравнительно близко друг от друга (например, на расстоянии 1 м) или же удалены друг от друга (например, могут быть смонтированы на транспортных средствах или могут носиться солдатами на поле боя), причем каждый микрофон, имеющий ненаправленную диаграмму направленности, измеряет давление дульной и ударной волн в точке его нахождения. Однако в тех случаях, когда датчики разнесены на достаточно большие расстояния и/или траектория снаряда проходит через антенну, точность измерения времени, необходимая для точного решения задачи на основании информации только об ударной волне, должна быть очень высокой, и для ее получения требуются специальные технические средства.
Большие размеры антенны могут представлять серьезный недостаток для систем, размещаемых на транспортных средствах. Кроме того, в системах, имеющих недостаточное разрешение по времени, могут возникать неоднозначные решения, в которых времена прихода ударной волны к заданному набору датчиков почти тождественны для двух зеркально симметричных точек выстрела.
Для использования известных алгоритмов требуется по меньшей мере 4 набора данных по ударной и дульной волнам, чтобы можно было преобразовать матрицу 4×4 для отображения плоской волны по временам прихода ударной волны. Небольшие ошибки в определении времени прихода ударной и дульной волн могут приводить к существенным ошибкам в оценке дальности. Кроме того, в традиционных алгоритмах принимается предположение о постоянной скорости движения снаряда по траектории, что приводит к неточностям оценок дальностей для выстрелов с достаточно большого расстояния, более 300 м.
Соответственно, существует потребность в быстросходящихся алгоритмах, способных обеспечивать точную оценку дальности для выстрелов, сделанных с достаточно большого расстояния. Также существует потребность в устранении неоднозначности определения направления на точку выстрела для решений, полученных на основании информации только об ударной волне. Также существует потребность в извлечении сигналов дульной волны, которые могут быть замаскированы различными акустическими сигналами, не имеющими отношения к выстрелу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является устранение недостатков технических решений предшествующего уровня, и в нем предлагаются способы и системы (в различных вариантах) для оценки дальности до точки выстрела для удаленных выстрелов, в особенности когда сигналы дульной волны слабы или же обнаруживаются недостаточным числом каналов обнаружения. Описанные в заявке способы и системы также улучшают возможности устранения неоднозначности решений, получаемых на основании только информации об ударной волне, с дополнительным улучшением, достигаемым в результате включения в процесс оптимизации слабых и/или обнаруженных с невысокой надежностью сигналов дульной волны.
В соответствии с одним из вариантов осуществления изобретения способ устранения неоднозначности определения траектории снаряда на основе информации только об ударной волне содержит следующие стадии: измерение по меньшей мере начальной части сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну; оценка распределения ошибок измерения времени для акустических датчиков; определение по измеренной начальной части сигналов, содержащих информацию только об ударной волне, разностей времен прихода для пар датчиков с разрешением по времени, которое больше, чем оцененное распределение ошибок измерения времени; и выбор правильной траектории на основании определенного уровня доверительной вероятности для устранения неоднозначности и величины невязки разности времен прихода для акустических датчиков.
В соответствии с другим вариантом осуществления изобретения способ устранения неоднозначности определения траектории снаряда на основе информации только об ударной волне содержит следующие стадии: измерение по меньшей мере начальной части сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну; определение по измеренной начальной части сигналов, содержащих информацию только об ударной волне, разностей времен прихода для пар датчиков; применение генетического алгоритма к начальной хромосоме, которая содержит начальные предполагаемые параметры траектории снаряда, для заданного числа поколений; вычисление невязок для решений, полученных с хромосомами из генетического алгоритма; выполнение градиентного поиска по решению, имеющему наименьшее значение невязки и по соответствующему ему неоднозначному решению; и в случае, если отношение решения, имеющего наименьшее значение невязки, к соответствующему ему неоднозначному решению больше, чем заданное значение, то выбор решения, имеющего наименьшее значение невязки, в качестве правильной траектории снаряда.
В соответствии еще с одним вариантом осуществления изобретения в способе оценки дальности до точки выстрела путем обнаружения ударной волны и дульной волны измеряются сигналы, содержащие информацию только об ударной волне, а также сигналы, содержащие информацию о дульной волне. Начальная дальность до точки выстрела оценивается по измеренным сигналам ударной и дульной волны и принятым начальным значениям скорости снаряда и коэффициента его лобового сопротивления. Мгновенная скорость снаряда вдоль его траектории вычисляется итеративно для получения обновленных значений дальности до точки выстрела. Число каналов обнаружения дульной волны обычно меньше числа каналов обнаружения ударной волны.
Предпочтительные варианты осуществления изобретения могут содержать один или несколько следующих признаков. Вычисляются значения разности времени прихода между сигналами, содержащими информацию только об ударной волне, и сигналами, содержащими информацию о дульной волне, и угла прихода для определения начальной дальности до точки выстрела. Должно быть выполнено заданное количество итераций, или же обновленное значение дальности до точки выстрела будет считаться окончательной дальностью, если соотношение между последовательными обновленными значениями дальности удовлетворяет критерию сходимости. Например, критерий сходимости может быть выбран таким образом, чтобы разница между последовательными обновленными значениями дальности до точки выстрела или относительное изменение этих значений в процентах было меньше заданной величины. Для получения действительных решений вычисленная скорость снаряда ограничивается нижним предельным значением, скоростью звука. Решения проверяются на непротиворечивость. Например, обновленное значение дальности до точки выстрела считаются недействительными, если угол траектории снаряда и угол прихода, которые были определены, превышают заданное значение.
Даже если вычисленная дальность до точки выстрела признана недействительной, решение все-таки может быть получено с использованием генетического алгоритма. Например, в этом алгоритме может быть определена начальная популяция с заранее заданным числом особей, причем каждая особь представлена трехмерной строкой, которая содержит предполагаемые значения дальности до точки выстрела, углов азимута и возвышения расхождения (с направлением на систему датчиков) траектории снаряда. Генетический алгоритм выполняется для заданного числа поколений, и в каждом поколении для особей вычисляются невязки. В каждом поколении решение, имеющее наименьшее значение невязки, выбирается в качестве особи, которая остается неизмененной (без мутаций). Решение, имеющее наименьшее значение невязки, выбирается в качестве обновленного значения дальности до точки выстрела. Решение может быть уточнено выполнением для каждой трехмерной строки в поколении заданного числа итераций для вычисления уточненного значения дальности до точки выстрела, причем невязки для особей в каждом поколении вычисляются с использованием уточненного значения дальности.
Генетический алгоритм включает операторы кроссовера (скрещивания) и мутации. Оператор кроссовера осуществляет обмен азимутов расхождения и/или углов возвышения расхождения между двумя особями популяции в поколении, в то время как оператор мутации может осуществлять мутацию поля (замена значения трехмерной строки случайно выбранным значением), последовательную мутацию (введении небольшого изменения во всех полях трехмерной строки) и нулевую мутацию (особь остается неизмененной).
В соответствии еще с одним вариантом осуществления изобретения способ устранения неоднозначности решения траектории снаряда, полученного на основании сигналов ударной волны и ограниченного числа сигналов дульной волны, содержит следующие стадии: измерение сигналов, содержащих информацию только об ударной волне, пятью или более разнесенными в пространстве акустическими датчиками; измерение сигналов, содержащих информацию о дульной волне, по меньшей мере четырьмя датчиками; и определение по сигналам, содержащим информацию только об ударной волне, разностей времен прихода для пар датчиков. Способ содержит также стадии: осуществление заранее определенного числа поколений генетического алгоритма из начальной популяции, содержащей заданное число особей, представленных четырехмерными строками, которые включают азимут и угол возвышения точки выстрела, азимут и угол возвышения расхождения; и вычисление для особей каждого поколения невязок, которые содержат подбор методом наименьших квадратов комбинации разностей времен прихода для сигналов ударной и дульной волн. Если отношение решения, имеющего наименьшее значение невязки, к соответствующему ему неоднозначному решению больше, чем заданное значение, например больше 2, то решение, имеющее наименьшее значение вычисленной невязки, выбирается в качестве правильной траектории снаряда.
В соответствии с другим вариантом осуществления изобретения способ извлечения сигнала дульной волны из суммарного сигнала, содержащего также сигналы ударной волны, содержит определение временного окна, имеющего ширину, соответствующую времени, которое необходимо дульной волне для прохождения системы датчиков, и обнаружение сигнала ударной волны. После обнаружения сигнала ударной волны окно смещается по времени, и суммарная энергия, полученная в окне, измеряется как функция величины смещения. Максимум измеренной суммарной энергии связывается с сигналом дульной волны.
Для предотвращения восприятия сигналов помех как сигналов ударной волны, траектория снаряда может отбрасываться как ложная, если акустическая энергия измеренного сигнала ударной волны меньше заданного порогового значения в заданной полосе частот, например в полосе частот от примерно 700 Гц до примерно 10 кГц. В качестве альтернативного или дополнительного варианта траектория снаряда может отбрасываться как ложная, если временной интервал, на котором измеренный сигнал ударной волны имеет положительное значение, меньше минимального заданного значения или больше максимального заданного значения, например меньше, чем примерно 70 мкс или больше, чем примерно 300 мкс.
В предпочтительных вариантах осуществления изобретения суммарная энергия может быть определена интегрированием измеренной энергии по временному окну, при этом части обнаруженного сигнала, связанные с отражениями ударной волны, предпочтительно отбрасываются. Пиковое значение сигнала может быть определено в окне, в котором получено максимальное значение суммарной энергии, и если пиковое значение сигнала превышает измеренное значение суммарной энергии в окне в заданное число раз, то может быть принято решение, что пиковое значение сигнала относится к сигналу дульной волны.
Варианты осуществления изобретения могут содержать один или несколько следующих признаков. Распределение ошибок измерения времени антенны и/или акустических датчиков может быть результатом изменений усиления, ошибок дискретизации и изменений положений датчиков антенны. Уровень доверительной вероятности для устранения неоднозначности зависит от размера антенны, причем для антенны меньших размеров требуется большая точность измерений. Если получены два неоднозначных решения, то правильная траектория снаряда выбирается на основании отношения невязок этих двух решений.
В других предпочтительных вариантах осуществления изобретения разности времен прихода для пар датчиков могут быть определены путем назначения датчика, который первым принимает ударную волну, в качестве опорного датчика, и установкой первого триггера схемы синхронизации, когда амплитуда, например, начальной части сигнала, содержащего информацию только об ударной волне, на опорном датчике превысит пороговое значение. Первый триггер запускает счетчики для всех других датчиков, и каждый из этих счетчиков работает до тех пор, пока соответствующий ему датчик не примет сигнал ударной волны. Когда один из остальных датчиков принимает, например, начальную часть сигнала, содержащего информацию только об ударной волне, он устанавливает второй триггер для этого датчика, который останавливает счетчик для этого датчика. Затем записываются значения разностей времен прихода для всех других датчиков по отношению к опорному датчику.
Другие особенности и преимущества настоящего изобретения станут ясными из нижеприведенного описания предпочтительных вариантов осуществления изобретения и из его формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие признаки и достоинства настоящего изобретения станут более понятными после детального ознакомления с описанием и прилагаемыми чертежами, на которых одинаковые элементы указаны одинаковыми ссылочными обозначениями и которые могут быть выполнены не в масштабе.
Фигура 1 - схематический вид сечения волнового конуса, пересекающегося с антенной.
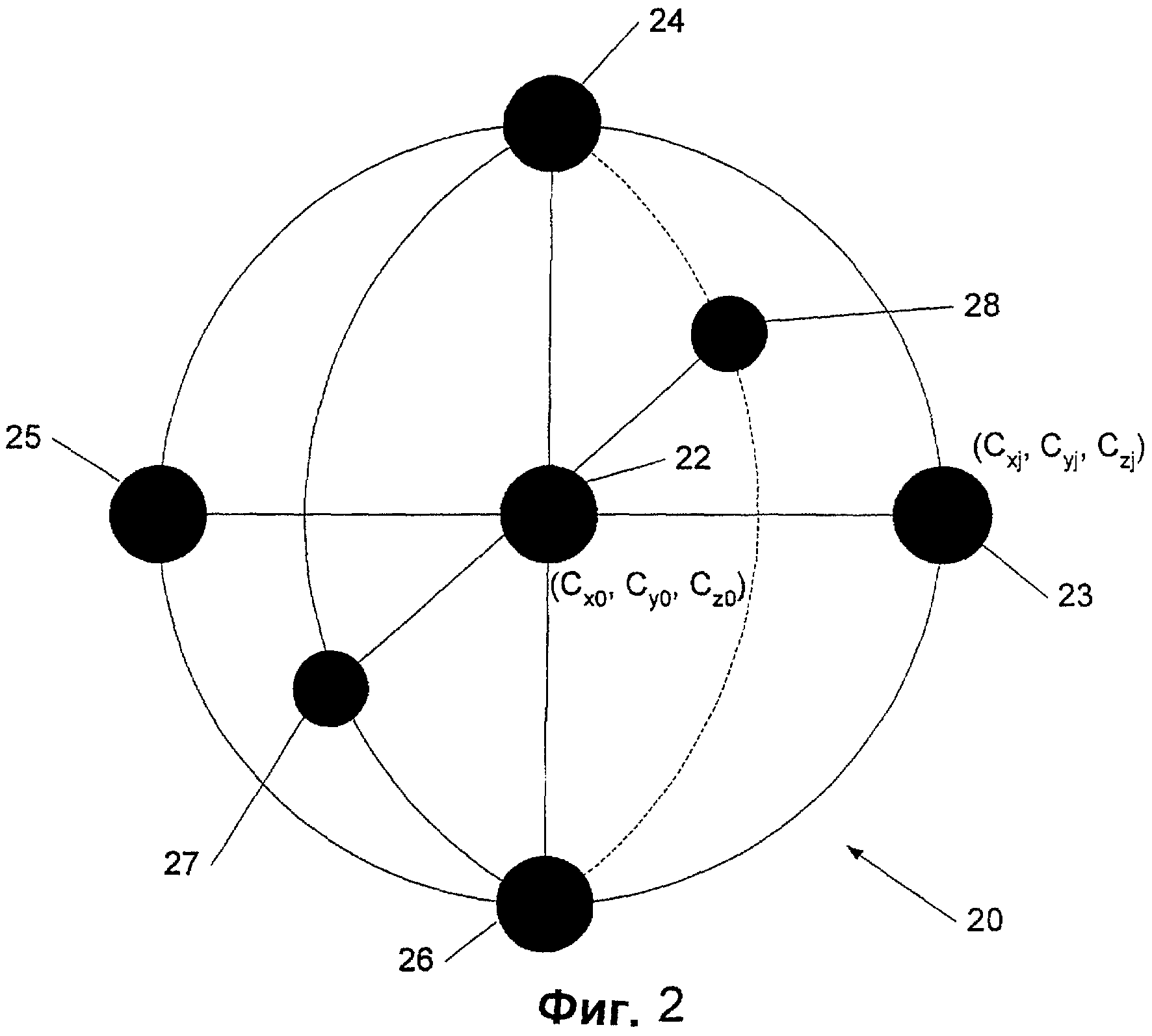
Фигура 2 - схематический вид типичной конфигурации датчиков, содержащей семь ненаправленных акустических датчиков.
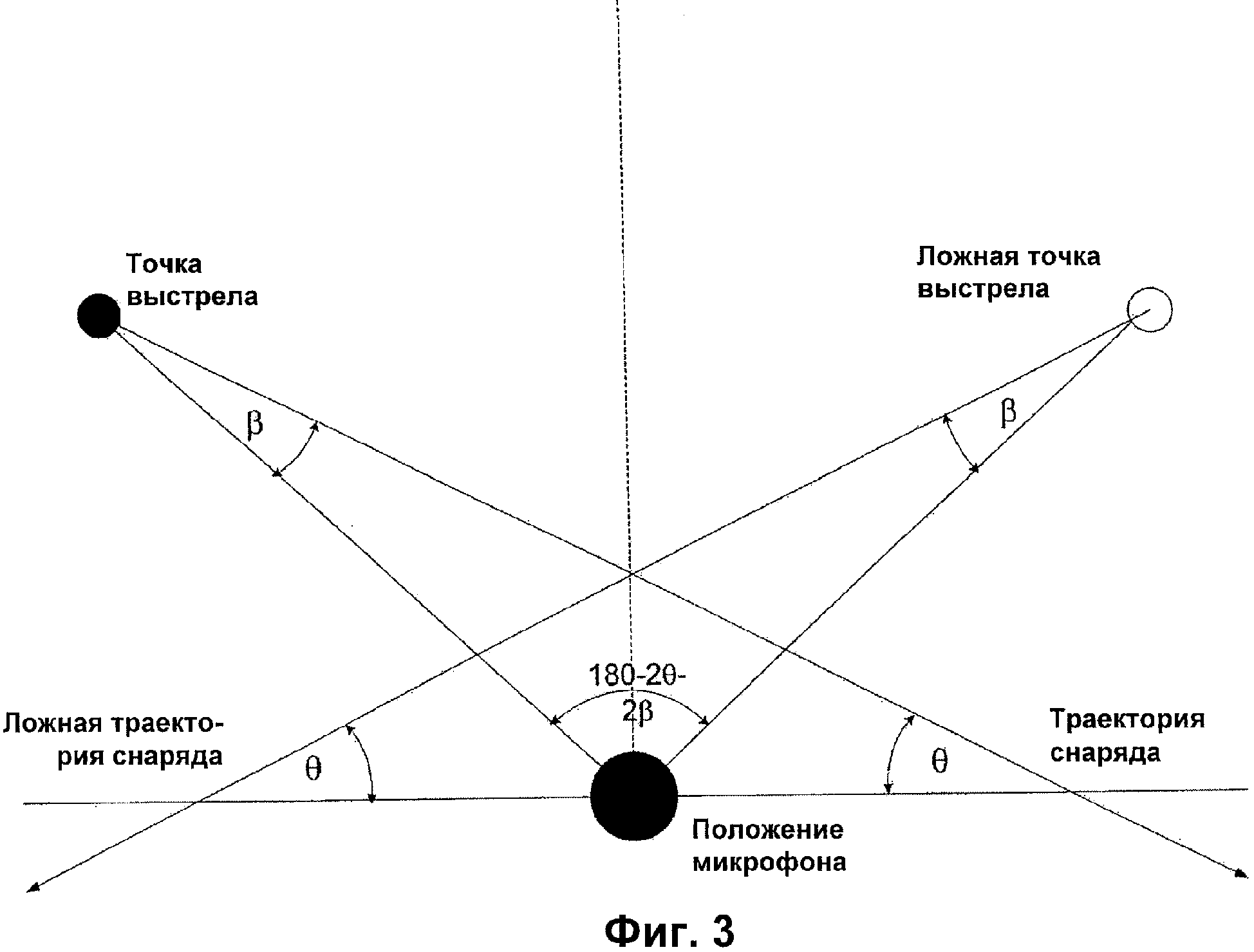
Фигура 3 - схема неоднозначности решения, присущей определению траектории на основании информации только об ударной волне.
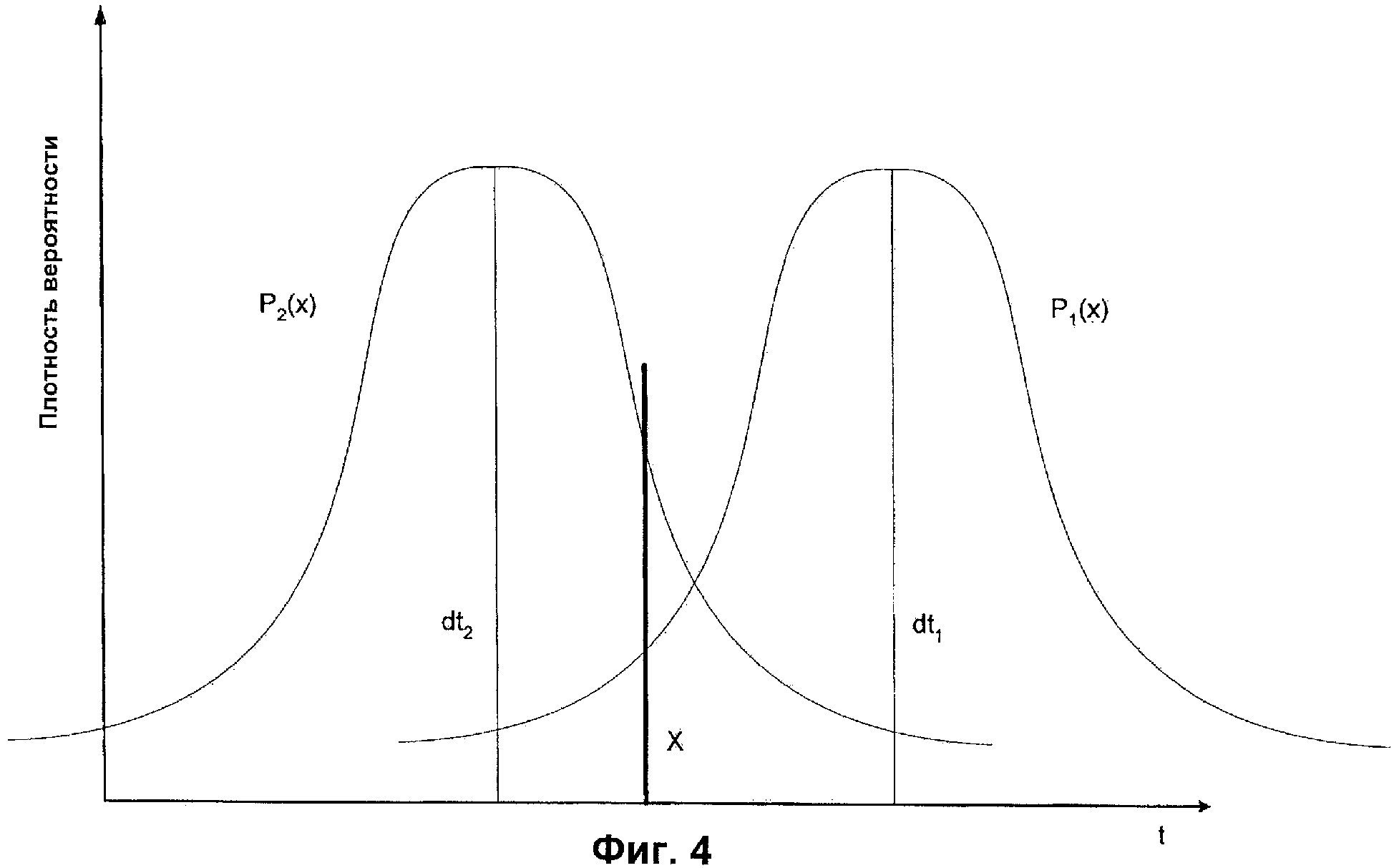
Фигура 4 - вид плотности вероятности для измерений разности времен прихода для определения окружности на поверхности волнового конуса.
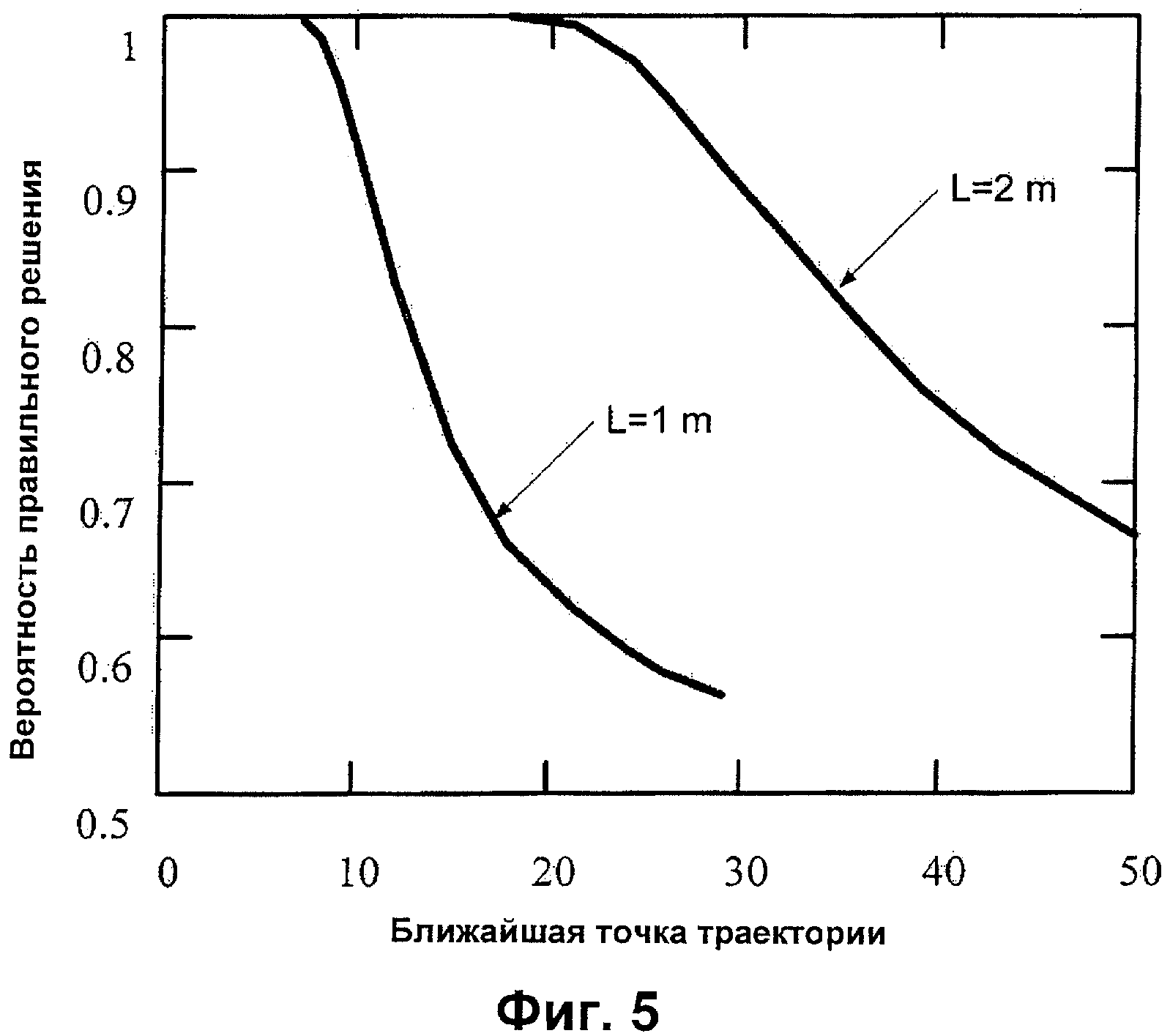
Фигура 5 - график вероятности правильного разрешения неоднозначности траекторий снаряда.
Фигура 6 - блок-схема осуществления корреляционного процесса.
Фигура 7 - блок-схема генетического алгоритма, используемого для правильного разрешения неоднозначности траекторий снаряда.
Фигура 8 - блок-схема алгоритма выделения сигналов, не имеющих отношения к ударной волне.
Фигура 9 - схематический вид модели времен прихода ударной волны.
Фигура 10 - блок-схема алгоритма оценки дальности.
Фигура 11 - блок-схема генетического алгоритма для выполнения оценки дальности.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Как указано выше в кратком описании изобретения, предлагаются способы и системы (в различных вариантах) для оценки дальности до точки выстрела и устранения неоднозначности в определении траектории снаряда. Эти системы и способ особенно целесообразно применять в тех случаях, когда определено недостаточное количество параметров, необходимых для точного решения, или когда параметры не могут быть надежно определены.
Траектории сверхзвуковых снарядов оцениваются только по временам прихода волны, создаваемой снарядом, которые измерены несколькими близко расположенными датчиками, распределенными в "небольшом" измерительном объеме, который далее называется антенной. Измерительный объем можно считать небольшим, если расстояния между датчиками не превышают 2 метров. Как только определена траектория снаряда, становится известным и положение точки выстрела, кроме дальности до нее вдоль по траектории. Эту дальность можно найти, если антенна также измеряет время прихода дульной волны. Однако не всегда имеется возможность измерения дульной волны, так что точное решение на основе информации только об ударной волне особенно важно для определения траектории.
Как можно видеть на фигуре 1, принимается, что поверхность ударной волны представляет собой расширяющуюся коническую поверхность, ось которой совпадает с траекторией снаряда. Поверхность ударной волны также называется волновым конусом. Для того чтобы получить решение на основе информации только об ударной волне, необходимо определить по временам прихода волны, измеренным пятью или более датчиками, три величины: угол прихода волны, радиус окружности на поверхности конуса и пространственный градиент радиуса окружности на расширяющейся поверхности конуса.
Угол прихода конической поверхности, которая первой достигает антенны, определяет два возможных угла (часто называемых "неоднозначными" углами) траектории снаряда относительно угла прихода волны к антенне. "Неоднозначные" углы будут более подробно описаны ниже в связи с фигурой 3. Радиус окружности на поверхности конуса в месте нахождения антенны определяет расстояние до траектории и направление на нее. Градиент радиуса окружности вдоль генерирующей поверхности определяет направление движения снаряда, и если он известен, то это позволяет устранить неоднозначность двух возможных направлений. Точное определение этих трех величин ударной волны, требующее выполнения очень точных измерений, позволяет осуществить выбор между двумя возможными "неоднозначными" углами траектории. Например, случайные ошибки не должны превышать примерно 1 мкс для правильного выбора между двумя альтернативными углами точки выстрела.
Требуемая точность может быть определена с учетом характеристик распространения ударной волны, схема которой приведена на фигуре 1. Антенна 20, схема которой представлена на фигуре 2, содержит N датчиков (N=7), способных определять времена прихода распространяющейся конической ударной волны. Поскольку в большинстве случаев траектории снарядов могут проходить в любом направлении, то элементы 23-28 антенны распределяются однородно по поверхности сферы в точках С (Cxj, Cyj, Czj), и один элемент 22 располагается в центре сферы (Сx0,
Сy0, Cz0), так что антенна имеет одинаковые характеристики для любого направления прихода волны. Время обнаружения распространяющейся конической поверхности первым датчиком, назначаемым в качестве опорного, обозначено t0. Другие датчики обнаруживают распространяющуюся коническую поверхность в последующие моменты времени, обозначенные tj. Расстояния, которые проходит звук в направлении распространяющейся конической поверхности, получают, умножая разности времен на местную скорость звука с, то есть dj=с·(tj-t0). Если ошибки измерений отсутствуют, то коническая поверхность, проходящая через опорный датчик, также определяется другими (N-1) датчиками с трехмерными координатами N точек, что обеспечивает идеальное определение всех параметров конуса ударной волны. Однако, как отмечалось выше, ошибки измерения времен прихода и координат датчиков могут приводить к определению параметров для конуса ударной волны с ошибками и, соответственно, к ошибкам определения траектории снаряда. Ниже будет рассмотрена точность определения разности времен, необходимая для правильного выбора между двумя неоднозначными углами траектории.
Система обладает особенностями, которые позволяют отбрасывать сигналы, не связанные с выстрелом, например шумы транспортного средства, вибрацию, шум ветра и электромагнитные импульсы. Например, мачта датчиков может быть установлена на транспортном средстве (не показано) с использованием эластомерных манжет в местах соединений для предотвращения дребезжания. Для крепления датчиков на окончаниях антенны могут использоваться эластомерные муфты, имеющие резонансные частоты порядка 1 Гц, для изоляции датчиков от вибрации антенны. Окончания, на которых размещаются датчики, могут быть прикреплены к общему корпусу антенны, который может содержать аналоговые электронные схемы, с помощью эластомерных амортизаторов для изоляции от вибрации мачты антенны.
Кроме того, может использоваться нижеприведенный алгоритм фильтрации сигналов, которые не обладают признаками, характерными для сигналов, связанных с ударной волной. Все величины записываются в параметрической (относительной) форме с возможностью их настройки. Указанные величины приведены лишь с целью иллюстрации.
На фигуре 8 приведена блок-схема алгоритма 800 определения связи обнаруженного сигнала с ударной волной. Алгоритм 800 начинается на стадии 802, затем на стадии 804 проверяется, достаточен ли пиковый уровень сигнала, чтобы считать его относящимся к ударной волне, например, превышает ли уровень сигнала заданное параметризованное пороговое значение, например 500. Если превышает, то выполняется стадия 806, на которой проверяется наличие резкого перехода от нулевого значения к пиковому значению сигнала, при этом проверяется также, что перед этим переходом к пиковому значению не было другого сигнала, имеющего достаточную величину, например 1/16 от пикового значения сигнала.
Если условия выполняются, то следует переход на стадию 808, на которой проверяется, что время между минимумом и максимумом ударной волны имеет достаточно большую величину, например 200-400 мкс. Если это условие выполняется, то следует переход на стадию 810, на которой проверяется, что минимальная и максимальная пиковые амплитуды сигнала достаточно близки, например первая величина составляет не меньше 35% от второй величины. Если это условие выполняется, то следует переход на стадию 812, на которой проверяется, что переход к пиковому значению давления от минимального пикового сигнала является достаточно резким; в этом случае используется тот же критерий, что и на стадии 806. Если это условие выполняется, то следует переход на стадию 814, на которой проверяется, что времена между максимальным значением сигнала и нулевым значением и между нулевым значением и минимальным значением сигнала являются сравнимыми, например, их разница находится в пределах порядка 180 мкс. Если на всех указанных стадиях получен утвердительный ответ, то принимается решение о том, что сигнал может относиться к ударной волне, и сигнал обрабатывается (стадия 816). В противном случае, если на одной из стадий алгоритма получен отрицательный ответ, то принимается решение о том, что обнаруженный сигнал не относится к ударной волне (стадия 818).
На схеме фигуры 1 принято, что траектория снаряда совпадает с осью X. Угол волнового конуса определяется выражением Θ=arcsin(1/M), где М - число Маха, определяемое как скорость V снаряда, деленная на скорость звука, с. L относится к характеристической длине антенны. Радиусы окружностей на поверхности конуса на двух концах антенны 20 равны r1 и r2. На схеме в левой части фигуры показано, как определяется радиус r1 окружности. Расстояние d определяется по формуле d=r1·cos(φ). Угол φ определяется по формуле sin(φ)=L/2r1, так что для малых значений φ можно принять φ~L/2r1. Величина разности времен для окружности между точками на поверхности антенны, пересекающейся с поверхностью конуса по окружности радиуса r1, равна dt1=Δd/c=(r1-d)/c~r1·φ2/2c=L2/(8·r1·c). Величина разности времен для окружности радиуса r2=r1-L·sin(Θ) определяется тем же выражением, в котором r1 заменяется на r2. Соответственно, dt2=dt1+L3·sin(Θ)/8r12·c.
Принимая допущение о случайных ошибках измерения, то есть предполагая, что разности времен измерения dt1 и dt2 являются случайными величинами, имеющими разные средние значения, но одно и то же статистическое стандартное отклонение σ, средние величины измерений на двух концах конфигурации датчиков обеспечивают правильное определение местной окружности. Типичные распределения величин измерений для разностей времен dt1 и dt2 представлены на фигуре 4.
Выборочное измерение, сделанное на краю 2, обозначено X. Радиус окружности на краю 2 (радиус r2) меньше радиуса на краю 1 (радиус r1). Поэтому все измерения, сделанные на краю 1, которые имеют значения, превышающие X, будут приводить к правильному решению о том, что радиус окружности на краю 1 больше, чем радиус окружности на краю 2. Вероятность того, что будет принято правильное решение в случае, если измерение на краю 2 дает значение X, определяется следующим образом:
где
и
После интегрирования по x и подстановки переменных получается следующее выражение для вероятности принятия правильного решения:
где
На фигуре 5 приведены кривые вероятности правильного решения, или уровень доверительной вероятности для устранения неоднозначности, для двух типичных размеров антенны, L=1 м и L=2 м, в зависимости от расстояния r между ближайшей точкой траектории снаряда и антенной 20. Скорость звука с была принята равной 340 м/с. Ясно, что антенна с бóльшими размерами имеет существенно расширенные возможности для однозначного определения точки выстрела по информации только об ударной волне. Для больших расстояний до ближайшей точки траектории разница радиусов окружностей на двух краях антенны (r1 и r2) слишком мала, чтобы ее можно было обнаружить, так что вероятность принятия правильного решения в этом случае достигает 50%, то есть значения полной неопределенности. Соответственно, уровень доверительной вероятности зависит от размера, а именно от диаметра антенны или ее протяженности в пространстве.
Как указывалось выше, источниками ошибок являются ошибки измерения времени и неопределенности координат датчика. Неопределенность координат датчика вносит систематические ошибки, которые существенно зависят от угла прихода ударной волны. Однако для случайно распределенных углов прихода ошибки координат датчика проявляются как случайные ошибки разностей времен.
Ошибки измерения времени определяются изменениями усиления и интенсивности сигнала от канала к каналу. Времена прихода определяют, когда выходные сигналы датчиков увеличиваются до заданного порогового значения V0. Ошибка dt измерения времени, связанная с изменениями усиления dg, зависит от скорости нарастания напряжения в канале следующим образом:
Ошибки измерения времени также возникают при изменениях уровня сигнала в пределах апертуры антенны. Для апертуры, имеющей длину L, и для цилиндрического источника звука на расстоянии r, максимальное изменение уровня сигнала в пределах апертуры равно p0 (L/2r), где p0 - звуковое давление по центру апертуры. Вышеприведенное уравнение для ошибки измерения времени также справедливо и для этого типа ошибки,


Распределение амплитудных ошибок среди датчиков не является случайным, а постепенно изменяется от максимума на краях апертуры до нуля в ее центре. На расстояниях, превышающих 10 м, и для апертуры, равной 1 м, максимальный коэффициент амплитуды не превышает 0,05, что существенно меньше параметра изменения усиления канала, равного 0,2, так что влиянием амплитудных ошибок можно пренебречь. С другой стороны, как указывалось выше, на дальностях, не превышающих 10 м, радиус волнового конуса достаточно мал по сравнению с длиной апертуры, равной 1 м, так ошибки измерений не имеют большого значения.
Практические оценки ошибок измерения времени, вызванных неопределенностью координат датчика, при допущении, что величины векторов ошибок статистически независимы и равномерно распределены между 0 и 1 мм, и что угловые ошибки статистически независимы, и стандартное отклонение имеет равномерное распределение, позволяют получить, что случайные ошибки разностей времен будут равны 0,85 мкс. Стандартное отклонение для случайных ошибок дискретизации времени, имеющих биномиальное распределение, для частоты выборки 1 МГц равно 0,25 мкс. Оценка ошибок измерения времени, вызываемых изменениями усиления, дает примерно 0,75 мкс для типичной системы с шириной полосы пропускания канала, равной 18 кГц, что соответствует скорости изменения напряжения порядка 0,02 В/мкс. Используемые акустические датчики для каждой антенной системы выбирались таким образом, чтобы их чувствительности находились в пределах ±1,5 дБ. Таким образом, изменения относительного усиления каналов примерно равномерно распределены между 0,84 и 1,19, так что стандартное отклонение относительного усиления приблизительно равно

Пороговое значение напряжения V0 равно 0,15 В, что дает величину стандартной ошибки измерения времени, равной 0,75 мкс.
Суммарные ошибки измерения времени оцениваются при допущении, что изменения усиления канала, изменения времени дискретизации и изменения положения датчиков являются статистически независимыми. В этом случае стандартное отклонение ошибки измерения времени можно оценить как √(0,852+0,752+0,252)=1,1 мкс.
Такую точность трудно получить с использованием аналого-цифрового преобразования, причем такая система будет стоить гораздо больше, поскольку в этом случае требуются высокие частоты выборки с последующей интерполяцией. В предлагаемой в изобретении системе для точного измерения разностей времен прихода используются две различные схемы.
В одном из вариантов осуществления изобретения в системе используется аналоговая схема измерения разности времен прихода, в которой в каждом канале используется тактовый генератор с частотой 1 МГц. Генераторы запускаются, когда выходной сигнал датчика превысит пороговое значение на опорном датчике, который был определен выше как первый датчик, в который приходит ударная волна. Как указывалось выше, тактовая частота 1 МГц достаточна на практике для того, чтобы можно было пренебречь ошибками дискретизации. Система работает в аналоговом режиме, опираясь на обнаружение пороговых значений, и при этом цифровые схемы выполняют следующие функции:
1. Первый триггер устанавливается в тот момент, когда амплитуда сигнала в канале опорного датчика, то есть первого датчика, в который приходит ударная волна, достигает порогового значения.
2. Первый триггер устанавливает в нуль счетчики каналов, которые отсчитывают импульсы тактового генератора. В процессор передается предупредительный сигнал.
3. Счетчик в каждом канале работает до момента, когда в соответствующий датчик поступит ударная волна. В этом момент устанавливается второй триггер в канале, который останавливает счетчик данного канала. Если второй триггер не будет установлен, то соответствующий счетчик будет работать, пока не будет достигнуто заданное верхнее предельное значение.
4. Конечное число отсчетов в каждом счетчике запоминается в цифровом регистре разностей времен прихода.
5. Процессор считывает информацию из регистра разностей времен прихода.
6. Процессор сбрасывает счетчики для получения информации о следующей ударной волне.
В другом варианте осуществления изобретения вычисляют корреляцию для каждого канала с каждым другим каналом, для интервала времени с центром возле времени обнаружения аппаратными средствами разности времен прихода. Корреляция двух функций, обозначаемая Corr(g,h), определяется следующим образом:
Корреляция является функцией, которую часто называют "временной сдвиг". Поэтому она относится к временным характеристикам и обладает следующим свойством:

когда g и h являются действительными функциями времени. G(f) является преобразованием Фурье g(t), a H(f) - преобразование Фурье h(t).
Суммарная энергия сигнала равна:
Сигнал времени прихода имеет конечную продолжительность, так что интегрирование (или суммирование для дискретных данных) должно быть выполнено только на ограниченном временном интервале вокруг времени прихода, причем, как это обычно используется в технике, продолжительность данных в одном или обоих каналах может быть расширена дополнением нулевыми значениями для того, чтобы продолжительности обоих сигналов были одинаковыми,
В нижеследующем рассмотрении для упрощения используются интегралы непрерывных функций, хотя реальные данные преобразованы в цифровую форму и являются дискретными. Специалисты в данной области техники легко смогут заменить интегралы суммированием.
На фигуре 6 приведена блок-схема алгоритма 60, в котором на стадиях 601, 602 в каналах i, j получают сигналы gi(t), gj(t), соответствующие ударной волне, и записывают их как функции от времени. На стадиях 603, 604 вычисляется суммарная энергия сигнала в канале i для последующей нормализации корреляции:
Суммарная энергия в канале

На стадии 605 вычисляется преобразование Фурьеi временной функции gi(t), соответствующей ударной волне, в канале i и формируется функция транспонирования Gi(-f). Аналогично, на стадии 606 вычисляется преобразование Фурье Gj(f) для временной функции gj(t) для всех других j-х каналов. Затем на шаге 608 формируется кросс-корреляция Gi(-f)•Gj(f) для каждой пары каналов (i, j), которая является функцией "временного сдвига" t. Разность времен прихода (для каждой пары каналов является временем tmax, где f(t) имеет свою максимальную величину, стадия 610. Корреляция между каналами i и j может быть определена как

Невязка для канала i определяется вычислением среднего значения для датчика i по всем датчикам

как указано на стадии 612. На стадии 614 разности времен прихода и корреляции для этого канала с наилучшей (то есть с наименьшей) суммарной невязкой выбираются в качестве "лучшего" решения.
Как было указано выше, данные сигнала канала выбираются с дискретными временными интервалами на заданной частоте, например 41666,66 выборок/сек. Это соответствует ширине элемента дискретизации, равной 24 мкс, отражающей разрешение по времени для принятого сигнала. Корреляционная обработка выполняется с разрешением по времени, которое уменьшается в 8 раз до 3 мкс, то есть 333333 выборок/сек.
После того как определены разности времен прихода для всех датчиков с использованием информации только об ударной волне, могут быть определены азимут и угол возвышения точки выстрела и траектория снаряда. Положение точки выстрела, то есть ее расстояние от антенны, может быть определено, если дополнительно принят сигнал дульной волны.
В декартовой системе координат, центр которой находится в центре антенны (см. фигуру 2), то есть {(Сx0, Сy0, Cz0)=(0, 0, 0)}, время прихода ударной волны к j-му датчику (Cxj, Cyj, Cyj) определяется выражением:

где


где с - скорость звука, М - число Маха, β представляет "угол расхождения" между направлением на точку выстрела и траекторией снаряда, который характеризуется азимутом и углом возвышения. Точному попаданию соответствует значение β=0. Угол Θ волнового конуса определяется выражением 1/М=sin(Θ).
Как было указано выше и показано на фигуре 3 для заданного положения точки выстрела и траектории снаряда, имеется и другое положение точки выстрела и траектория снаряда, для которой времена прихода ударной волны для заданной конфигурации датчиков практически одинаковы. Эти два неоднозначных решения будут тождественны, если в упрощенной модели принимается допущение, что ударная волна распространяется через конфигурацию датчиков как плоская волна. Если разрешение разностей времен прихода достаточно высокое для определения окружности на волновом конусе ударной волны, то из двух почти тождественных решений может быть выбрано правильное. Схема неоднозначности решений на основе информации только об ударной волне представлена на фигуре 3.
Если измерения времени прихода являются достаточно точными, то правильное решение для точки выстрела и траектории снаряда может быть получено вычислением, в котором минимизируется среднеквадратичная невязка измеренных и расчетных разностей времен прихода ударной волны:

где сумма берется по всем датчикам.
Одним из подходов, который позволяет решить эту проблему, является LI-алгоритм Левенберга-Маркара, который подробно описан в патенте США №5930202. Во многих классических алгоритмах последовательного приближения используется детерминистская процедура приближения к оптимальному решению, которая начинается с решения, выбранного наугад, и затем задается направление поиска, основанное на заданном правиле переходов, например на прямых методах, в которых используется целевая функция и стоимости ограничений, и на градиентных способах, в которых используются производные первого и второго порядков. Однако эти способы имеют ряд недостатков, например, оптимальное решение зависит от выбранного начального решения, и большинство алгоритмов могут "застревать" на субоптимальном решении, например, это может быть локальный минимум, или же поверхность функции стоимости имеет плоскую область минимума, так что дальнейшие итерации результат не улучшат.
Было найдено, что глобальный минимум для направления на точку выстрела и для траектории снаряда может быть вычислен быстро и более надежно (с устранением неоднозначности) с использованием эволюционного генетического алгоритма. Генетический алгоритм воспроизводит природные эволюционные процессы и применяет их для выполнения исследований и оптимизации.
Блок-схема генетического алгоритма представлена на фигуре 7. Вместо принятия вначале в качестве решения одного приближения процесс 70 генетического алгоритма начинается с инициализации случайной популяции решений на стадии 71, при этом на стадии 72 устанавливается в нуль счетчик поколений, что соответствует исходному набору решений. После создания случайной популяции решений каждое из таких решений оценивается на стадии 73 как задача нелинейного программирования, и каждому решению на стадии 74 присваивается коэффициент приспособленности (относительное достоинство). Приспособленность может быть представлена эвклидовым кодовым расстоянием Δτm между расчетным решением и решением, полученным в результате измерения.
Интуитивно чувствуется, что лучше тот алгоритм, который обеспечивает меньшее значение Δτmin.
Например, при применении генетического алгоритма для разрешения неоднозначности определения направления на точку выстрела и траектории снаряда обычный генетический алгоритм использует в качестве исходной популяции 200 наборов, содержащих следующие параметры:
[AzimuthShooter, ElevationShooter, AzimuthMissed, ElevationMissed].
Параметры [AzimuthShooter, ElevationShooter] определяются углом (Θ+β), в то время как параметры [AzimuthMissed, ElevationMissed] определяются углом β (см. фигуру 3). Поскольку в вышеописанном способе используется информация только об ударной волне, а информация о дульной волне не используется, то расстояние между системой датчиков и точкой выстрела принимается равным примерно 100 метрам.
Исходная популяция создается случайным выбором наборов 4 параметров в разумном диапазоне значений (все величины в градусах).
AzimuthShooter= {0, …, 360} (азимут точки выстрела)
ElevationShooter = {-10, …, 30} (возвышение точки выстрела)
AzimuthMissed = {-20, …, 20} (азимут расхождения)
ElevationMissed={-20, …, 20} (возвышение расхождения)
На стадии 75 осуществляется проверка достижения максимального числа итераций работы генетического алгоритма, которое может быть установлено, например, равным 25. Если достигнуто максимальное число итераций, процесс 70 прекращается на стадии 80, и полученный результат может быть принят, или же выполняется его дальнейшая оценка. В противном случае на стадии 76 проверяется соответствие заданному критерию приспособленности (пригодности).
В качестве критерия приспособленности может быть задан, например, расчетный азимут расхождения <15° и/или отношение невязок двух неоднозначных решений. Если критерий приспособленности выполняется, то процесс 70 прекращается на стадии 80; в противном случае создается новая популяция с использованием операторов кроссовера, стадия 77, и мутации, стадия 78, и счетчик поколений увеличивается на единицу, стадия 79.
"Лучшей" особи в каждом поколении разрешается выжить без мутации, в то время как 100 особей, имеющие лучшие значения приспособленности, также выживают, однако используются для создания следующих 100 особей из пар выживших с использованием операторов кроссовера/мутации, указанных в Таблице 1.
Следующие типичные операторы кроссовера и мутации использовались для демонстрационного выполнения процесса 70.
Неоднозначность устраняется и/или улучшаются возможности по выбору правильного решения путем выполнения градиентного поиска по лучшему решению и по соответствующему альтернативному решению. Вычисляются невязки и отношения невязок для обоих неоднозначных решений. Если вычисленный азимут расхождения меньше 15°, что означает "близкие" выстрелы, и если отношение невязок больше 2, то выбирается решение с меньшей невязкой. В противном случае выбор не производится, и решение с меньшей невязкой обозначается как "первичное" решение, а другое решение обозначается как "альтернативное" решение.
При использовании информации только об ударной волне генетический алгоритм вырабатывал решение на компьютере с частотой процессора 1 ГГц и операционной системой Linux в течение 0,15 секунды на широком спектре моделируемых выстрелов. Азимут расхождения 97% моделируемых выстрелов находился в пределах 15°, и азимут расхождения 86% моделируемых выстрелов находился в пределах 5°. Используемый алгоритм устранения неоднозначности обеспечил устранение неоднозначности для 95% близких выстрелов, то есть выстрелов с азимутами расхождения, не превышающими 15°. Алгоритм устранения неоднозначности вырабатывал правильные решения для более удаленных выстрелов в 70% всех случаев. Можно ожидать, что точность устранения неоднозначности будет изменяться в зависимости от геометрии системы датчиков и предполагаемого распределения выстрелов, причем для выстрелов с малыми углами возвышения задача устранения неоднозначности решается проще.
Вышеописанные решения для траектории снаряда были получены без использования информации о дульной волне. Однако было найдено, что даже слабый сигнал дульной волны или же сигнал дульной волны, полученный только несколькими каналами, может быть успешно использован для улучшения характеристик определения дальности и устранения неоднозначности решений.
На фигуре 9 представлена схема модели времени прихода, которая более подробно описана в патенте США №6178141. Эта модель может быть использована для оценки траектории снаряда и направления на точку выстрела относительно положения датчика. Модель времени прихода построена на баллистической модели, учитывающей определенные физические характеристики, относящиеся к траектории снаряда, в частности плотность воздуха (зависит от температуры); декартовы координаты (Px, Рy, Pz) точки

Как показано на схеме фигуры 9, точка





Время прихода равно времени





где t0 - это точка отсчета времени (момент выстрела) и с0 - скорость звука. На фигуре 9 также показан угол Θ волнового конуса.
В данном случае вполне можно допустить, что скорость V снаряда остается постоянной на отрезке траектории, соответствующем расстоянию между датчиками, поскольку между моментами времени, в которые происходит излучение волны, принимаемой разными датчиками, происходит лишь незначительное уменьшение скорости. Однако на бóльших отрезках траектории скорость снаряда уменьшается из-за сопротивления воздуха. Сопротивление воздуха определяется коэффициентом Сb лобового сопротивления, который зависит от формы и калибра снаряда. С помощью математической баллистической модели можно определить время прихода ударной волны в любую заданную точку пространства как функцию полного набора параметров, описывающих снаряд (например коэффициент Сb лобового сопротивления), причем начальная скорость и плотность окружающего воздуха заранее известны.
Параметры, необходимые для получения точного решения, как правило, неизвестны в реальной обстановке, например на поле боя. Однако оценка дальности может быть существенно улучшена с помощью итеративного процесса 200, блок-схема которого представлена на фигуре 10 и в котором учитывается замедление снаряда при его движении по траектории. Процесс 200 начинается на стадии 202 принятием следующих допущений:
с0 - скорость звука, пересчитанная для температуры и давления внешней среды (=340 m/s);
Сb - номинальный коэффициент лобового сопротивления, усредненный для предполагаемых видов оружия;
V0 - начальная скорость снаряда, в момент выстрела, усредненная для предполагаемых видов оружия;
М0=V0/c - начальное число Маха снаряда.
Первая оценка дальности D0 до точки выстрела вычисляется на стадии 204 с использованием измеренной разности τms времени прихода и угла α между направлениями от точек излучения дульной и ударной волн на систему датчиков и для начальных значений скорости V и числа Маха М по нижеприведенной формуле
Для указанных допущений скорость снаряда на расстоянии а от точки
так что время прохождения снарядом расстояния а вдоль траектории может быть вычислено на стадии 208 по формуле:
Угол Θ связан с числом Маха Ма в соответствии со следующим уравнением:
где начальное значение числа Маха Ма устанавливается равным М0. Необходимо отметить, что мгновенная скорость снаряда принимается равной скорости звука (то есть Ма=1), если вычисленная скорость снаряда становится меньше скорости звука. На стадии 210 расстояние


Углы α, β и Θ связаны соотношением (α+β+Θ)=90°. Затем осуществляется цикл, начиная со стадии 206, подстановкой вычисленного значения расстояния а в вышеприведенные уравнения для Ма и Та, в результате чего вычисляется уточненное значение числа Маха Ма и уточненное значение времени Та прохождения снарядом расстояния а. Затем измеренная разность τms времени прихода и вычисленные обновленные значения Та и а используются для последовательного обновления величины D дальности до точки выстрела:

Цикл выполняется до тех пор, пока не будет достигнуто максимальное количество итераций или не будет получено схождение значения дальности D (определяется на стадии 212).
Также на стадии 214 проверяется, является ли пересчитанное значение дальности

Как указывалось выше, для вычисления дальности D0 до точки выстрела в нулевой аппроксимации используется исходная пара чисел (τms, α) без учета изменения скорости снаряда в процессе полета. Если вышеописанный процесс 200 возвращает решение, геометрия которого не согласуется с этой парой чисел (τms, а), то такое решение отбрасывается.
Даже если точное решение не может быть получено, ставится задача нахождения значений для дальности D0 до точки выстрела и углов азимута и возвышения расхождения, связанных с β, которые наилучшим образом соответствуют измеренным разностям времен прихода ударной и дульной волн. Как указывалось выше, разности времен прихода к разным датчикам ударной волны в большинстве случаев могут быть надежно измерены. Азимут и угол возвышения точки выстрела могут быть определены из информации только об ударной волне с использованием известных координат датчиков (Sxj, Syj, Szj), при этом дальность до точки выстрела не определяется. Далее предполагается, что могут быть также измерены разности τms времен прихода ударной и дульной волн, причем дульная волна может обнаруживаться не всеми датчиками.
Если на стадии 214 определяется, что итерационный процесс 200 не возвращает приемлемый результат, то процесс пытается вычислить дальность до точки выстрела, запустив эволюционный генетический алгоритм. Генетический алгоритм воспроизводит природные эволюционные процессы и применяет их для выполнения исследований и оптимизации. Поиск в генетическом алгоритме начинается со случайного набора решений вместо использования всего лишь одного решения. После выбора случайной популяции решений каждое из таких решений оценивается как задача нелинейного программирования, и каждому решению присваивается коэффициент "приспособленности" (относительное достоинство). В одном варианте осуществления изобретения приспособленность может быть представлена эвклидовым кодовым расстоянием между вычисленным решением и решением, полученным в результате измерения, например, с помощью уравнения:

Интуитивно чувствуется, что лучше тот алгоритм, который обеспечивает меньшее значение Δτmin.
Блок-схема генетического алгоритма 300 представлена на фигуре 11. В процессе 300 на стадии 302 используется разность τms времени прихода и угол прихода α, измеренные ранее в процессе 200. Примерное число трехмерных строк, содержащих величины {RANGE, MA, ME}, определяется в качестве начальной популяции на стадии 304, где RANGE - дальность

RangeShooter={1000, …, 3000} [метры] - дальность до точки выстрела.
AzimuthMissed - {-20, …, 20} [градусы] - азимут расхождения.
ElevationMissed={-20, …, 20} [градусы] - возвышение расхождения.
Вычислительный процесс осуществляется аналогично описанному выше для случая использования только информации об ударной волне. Вначале на стадии 306 для нулевого поколения (Gen=0) вычисляется вектор положения точки

Pz) для каждой трехмерной строки с предварительно определенными углами азимута и возвышения и предполагаемой величиной RANGE для определенной трехмерной строки.
Принимая М0 в качестве начального значения числа Маха, вектор

между точкой выстрела и j-м датчиком, который обнаруживает ударную волну.
Для каждой трехмерной строки вычисляется угол β по формуле
где символ "•" означает скалярное произведение двух векторов. Обновленные значения расстояния а, времени Та прохождения снарядом расстояния а и числа Маха Ма вычисляются на стадии 312 подстановкой вычисленного значения β и первоначально принятых значений Мa=М0 и а в вышеприведенные уравнения для Ма, Та, а и D. Процесс выполняется итеративно несколько раз для каждой из трехмерных строк, например 3 раза, после проверки условия перехода на стадии 312, после чего на стадии 314 для каждой трехмерной строки вычисляется невязка Δτmin, которая была определена выше и которая включает сигнал дульной волны.
На стадии 316 осуществляется проверка достижения максимального числа итераций работы генетического алгоритма, которое может быть установлено, например, равным 25. Если достигнуто максимальное число итераций, процесс 300 прекращается на стадии 320, возвращая трехмерную строку, для которой получено наименьшее значение невязки. В противном случае процесс 300 создает новую популяцию с использованием кроссовера и мутации, стадия 318, и счетчик поколений увеличивается на единицу, стадия 322.
"Лучшей" особи в каждом поколении разрешается выжить без мутации, в то время как 100 особей, имеющие лучшие значения приспособленности, также выживают, однако используются для создания следующих 100 особей из пар выживших с использованием операторов кроссовера/мутации, указанных в нижеприведенной Таблице 2.
Следующие типичные операторы кроссовера и мутации использовались для демонстрационного выполнения процесса 300.
Генетический алгоритм 300 выполняется для начальной популяции из 200 различных трехмерных строк, с коэффициентом пополнения 50, всего для 25 поколений. Генетический алгоритм решается 5 раз параллельно с различными наборами начальных трехмерных строк, и решение, имеющее наименьшее значение невязки, выбирается в качестве окончательного решения для параметра RANGE, для углов азимута и возвышения расхождения точки выстрела, в результате чего обеспечивается вычисление вектора

Недавние экспериментальные работы показали уменьшение выстрелов, для которых были получены неоднозначные решения, с 95 до 8% на том же наборе данных за счет использования по меньшей мере одного канала информации о дульной волне в дополнение к пяти или более каналам информации об ударной волне, что является значительным улучшением по сравнению с решениями, основанными на информации только об ударной волне.
Вычисления, в которых не учитывалось замедление снаряда из-за сопротивления воздуха в процессе его движения по траектории, имеют тенденцию к увеличенной оценке дальности. Для некоторых вариантов взаимного расположения точки выстрела, антенны и направления выстрела и для достаточно удаленных точек выстрела такое увеличение оценки дальности может превышать 20%. Вышеописанный процесс устраняет эту неточность оценки дальности для случаев обнаружения удаленных точек выстрела.
Как указано выше, при получении неоднозначных решений на основании информации только об ударной волне часто можно выбрать правильное решение путем сравнения невязок различных траекторий и выбора траектории, имеющей меньшую невязку.
Если сигналы дульной волны обнаруживаются в четырех или более каналах датчиков, то для однозначного определения координат точки выстрела могут быть использованы вышеописанные алгоритмы, предназначенные для обработки информации об ударной и дульной волнах, независимо от числа каналов, из которых выдается информация об ударной волне. Если сигналы дульной волны обнаруживаются не более чем четырьмя датчиками, а сигналы ударной волны обнаруживаются более чем в пяти каналах, то может быть использован описанный генетический алгоритм с модифицированной функцией стоимостей или невязок, в котором независимо от того, какие сигналы дульной волны получены, они используются ("подмешиваются") в функции оптимизации для устранения неоднозначности решения, полученного на основе информации только об ударной волне, и/или для улучшения оценки дальности до точки выстрела. Однако если дульная волна обнаружена менее чем тремя каналами И, ударная волна обнаружена менее чем пятью каналами, то может вырабатываться предупредительный сигнал без попытки определения положения точки выстрела.
Возможность надежного обнаружения сигнала дульной волны всеми каналами может отсутствовать по следующим причинам:
1. Уровень обнаружения в одном или нескольких каналах слишком низок, чтобы обеспечить уверенное обнаружение.
2. Сигнал ударной волны не может быть выделен в общем сигнале, что вызывает корреляцию с "шумом", приводящую к ненадежным оценкам разностей времен прихода.
3. Отраженные сигналы ударной волны могут быть сильнее, чем сигнал дульной волны, и могут приходить раньше, чем сигнал дульной волны, в результате чего ударная волна ошибочно может быть воспринята как дульная волна.
Если в каких-то каналах обнаружен только сигнал дульной волны, то невязка в этом случае может быть определена по формуле:

где в первом члене, относящемся к дульной волне, осуществляется суммирование по уменьшенному числу датчиков (<4), которые обнаружили дульную волну, а во втором члене осуществляется суммирование по датчикам, которые обнаружили ударную волну (обычно все датчики).
Вышеописанные примеры показывают, что сигналы дульной волны обеспечивают важную дополнительную информацию об азимуте точки выстрела и, соответственно, о траектории снаряда, так что расчетное решение траектории в большей степени согласуется с одним из неоднозначных решений, то есть обеспечивается устранение неоднозначности полученных решений.
В отсутствие по меньшей мере нескольких сигналов дульной волны может быть получено много неоднозначных решений, в особенности для больших дальностей до точки выстрела, что менее желательно, чем меньшее число однозначных решений, хотя и менее точных.
В случае потенциально ненадежного обнаружения дульной волны вначале все-таки может быть сделана попытка обнаружить сигналы дульной волны, например, выделить признаки дульной волны на фоне шумов и в результате вычислить разности времен прихода. Обнаружение дульной волны может считаться надежным, если сигналы дульной волны поступают из достаточного числа датчиков с достаточной перекрестной корреляцией между каналами, и если имеется достаточно сильная корреляция между сигналом дульной волны и соответствующей необработанной полосой в каждом канале (смещенной на какое-то число элементов дискретизации для компенсации задержек фильтра).
В противном случае отбрасываются по меньшей мере те сигналы дульной волны, для которых получена недостаточная корреляция, и запускается следующая логика приближенного обнаружения сигнала дульной волны:
- Поиск энергетических пиков в сигнале ударной волны после прихода фронта ударной волны. Отметка этих пиков в качестве возможных отраженных сигналов ударной волны, в результате чего они могут быть исключены из рассмотрения в качестве сигналов дульной волны.
- Определение максимального времени, которое требуется дульной волне для пересечения системы датчиков, и определение "окна", имеющего соответствующую продолжительность. Поиск энергетических пиков дульной волны путем перемещения указанного окна во всех каналах датчиков после обнаружения ударной волны, пропуская участки сигнала, которые были отмечены как отражения ударной волны. Интегрирование энергии по окну, то есть поиск максимума функции:
где вторая степень

Для выделения на фоне шумов проверяется пиковая энергия в окне, в котором получен максимум функции fmax(i), для определения того, что энергетический пик на этом максимуме выше, чем энергетический уровень в окне в заданное число раз. Если это условие выполняется, то сигнал в окне определяется как обнаружение дульной волны и выполняется перекрестная корреляция по всем каналам в полосе дульной волны mb для определения разностей времен прихода дульной волны.
Затем обнаруженный сигнал дульной волны может использоваться для определения дальности до точки выстрела и/или устранения неоднозначности сигнала ударной волны, как описано выше.
Таким образом, описанная система способна точно, быстро и во многих случаях однозначно определять направление на точку выстрела и траекторию движения снаряда на основании информации только об ударной волне. Процент однозначных решений может быть увеличен, и может оцениваться дальность до точки выстрела, если также обнаруживается хотя бы слабый сигнал дульной волны. Система относительно имеет низкий уровень ложных срабатываний, которые могут вызываться вибрацией или шумом транспортного средства, порывами ветра, фейерверками или близкими выстрелами в сторону от системы.
Необходимо упомянуть, что система, обнаруживающая сигналы ударной волны, выполняет две проверки принятых сигналов с тем, чтобы определить, могут ли они быть отнесены к ударным волнам. Во-первых, суммарная измеренная энергия в полосе частот между примерно 700 Гц и 10 кГц сравнивается с эмпирическим пороговым значением. Только в том случае, когда это пороговое значение превышается, сигнал может рассматриваться как относящийся к ударной волне. Во-вторых, временной интервал обнаруженного исходного положительного пика давления должен быть больше, чем примерно 70 мкс и меньше, чем примерно 300 мкс. Эти условия обеспечивают нечувствительность системы к импульсным шумам, например к фейерверкам и к выстрелам, не представляющим угрозы. Если указанные условия не выполняются, то обнаруженный сигнал не считается ударной волной, и расчет точки выстрела не выполняется.
В то время как изобретение подробно описано в отношении предпочтительных вариантов его осуществления, необходимо иметь в виду, что без отклонения от сущности и объема изобретения могут быть выполнены различные изменения и улучшения описанных вариантов. Хотя в иллюстративных вариантах осуществления изобретения в качестве акустических датчиков указаны микрофоны, однако их использование не является обязательным. Вместо микрофонов могут использоваться и другие виды механических или электрических датчиков, чувствительных к давлению. Кроме того, значения, приведенные в Таблицах 1 и 2 для различных операторов, должны рассматриваться только как примеры, то есть в зависимости от реальных условий работы могут быть выбраны и другие значения. Соответственно, сущность и объем настоящего изобретения ограничивается только его формулой.
Реферат
Использование: для определения траектории сверхзвукового снаряда. Сущность: заключается в том, что осуществляют измерение, по меньшей мере, начальной части сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну, определяют по измеренной начальной части сигналов, содержащих информацию только об ударной волне, разности времен прихода для пар датчиков, применяют генетический алгоритм к начальной хромосоме, которая содержит начальные предполагаемые параметры траектории снаряда, для заданного числа поколений, вычисляют невязки для решений, полученных с хромосомами из генетического алгоритма, вычисляют отношение решения, имеющего наименьшее значение невязки, к соответствующему ему неоднозначному решению, и если это отношение больше, чем заданное значение, то выбирают решение, имеющее наименьшее значение вычисленной невязки, в качестве правильной траектории снаряда. Технический результат: обеспечение точной оценки положения точки выстрела сверхзвукового снаряда, сделанного с достаточно большого расстояния. 4 н. и 27 з.п. ф-лы, 11 ил.
Формула
измерение по меньшей мере начальной части сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну;
определение по измеренной начальной части сигналов, содержащих информацию только об ударной волне, разностей времен прихода для пар датчиков;
применение генетического алгоритма к начальной хромосоме, которая содержит начальные предполагаемые параметры траектории снаряда, для заданного числа поколений;
вычисление невязок для решений, полученных с хромосомами из генетического алгоритма;
вычисление отношения решения, имеющего наименьшее значение невязки, к соответствующему ему неоднозначному решению; и
если это отношение больше, чем заданное значение, то выбор решения, имеющего наименьшее значение вычисленной невязки, в качестве правильной траектории снаряда.
вычисление новых решений путем выполнения градиентного поиска по решению, полученному из генетического алгоритма и имеющему наименьшее значение невязки, и по соответствующему ему неоднозначному решению;
вычисление отношения по новым решениям; и
если это отношение больше, чем заданное значение, то выбор нового решения, имеющего наименьшее значение вычисленной невязки, в качестве правильной траектории снаряда.
измерение по меньшей мере начальной части сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну;
оценку распределения ошибок измерения времени для акустических датчиков;
определение по измеренной начальной части сигналов, содержащих информацию только об ударной волне, разностей времен прихода для пар датчиков с разрешением по времени, которое больше, чем оцененное распределение ошибок измерения времени; и
выбор правильной траектории снаряда на основании заданного уровня доверительной вероятности для устранения неоднозначности и на основании величины невязки разности времен прихода для акустических датчиков.
назначение датчика, который первым принимает ударную волну, в качестве опорного датчика;
установку первого триггера схемы синхронизации, когда амплитуда начальной части сигнала, содержащего информацию только об ударной волне, на опорном датчике превысит пороговое значение, причем первый триггер запускает счетчики всех других датчиков, и каждый из этих счетчиков работает до тех пор, пока соответствующий ему датчик не примет сигнал ударной волны;
установку для других датчиков второго триггера, который останавливает их счетчики, когда эти датчики принимают начальную часть сигнала, содержащего информацию только об ударной волне;
запись значений разностей времен прихода для других датчиков по отношению к опорному датчику.
измерение сигналов, содержащих информацию только об ударной волне, пятью или более акустическими датчиками, разнесенными в пространстве так, что они формируют антенну;
измерение сигналов, содержащих информацию о дульной волне, по меньшей мере четырьмя датчиками;
определение по сигналам, содержащим информацию об ударной волне, разностей времен прихода для пар датчиков;
осуществление заданного числа поколений генетического алгоритма с использованием начальной популяции, которая содержит заданное число особей, представленных четырехмерными строками, которые включают азимут и угол возвышения точки выстрела, азимут и угол возвышения расхождения;
вычисление для особей каждого поколения невязок, которые содержат подбор методом наименьших квадратов комбинации разностей времен прихода сигналов ударной волны и дульной волны; и
если отношение решения, имеющего наименьшее значение невязки к соответствующему ему неоднозначному решению больше, чем заданное значение, то выбор решения, имеющего наименьшее значение невязки, в качестве правильной траектории снаряда.
определение временного окна, имеющего ширину, соответствующую времени, которое необходимо дульной волне для прохождения системы датчиков;
обнаружение сигнала ударной волны;
смещение окна по времени и определение как функции времени суммарной энергии, полученной в окне, после обнаружения сигнала ударной волны;
связывание максимума измеренной суммарной энергии с сигналом дульной волны.
Комментарии