Магнитно-резонасная проекционная визуализация - RU2684531C2
Код документа: RU2684531C2
Чертежи









Описание
ЗАЯВЛЕНИЕ ОБ УСТАНОВЛЕНИИ ПРИОРИТЕТА
Эта патентная заявка испрашивает приоритет относительно предварительной патентной заявки США, автор Lachaine и др., Серийный номер 62/090,115, озаглавленной "МАГНИТНО-РЕЗОНАНСНАЯ ПРОЕКЦИОННАЯ ВИЗУАЛИЗАЦИЯ", поданной 10 декабря 2014 (Номер дела Патентного Поверенного 4186.006PRV), которая тем самым целиком включена в настоящий документ по ссылке.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Лучевая терапия или "радиотерапия" может быть использована для лечения раковых образований или других болезней ткани млекопитающих (например, для человека и животного). Одна из таких методик радиотерапии упоминается как "гамма нож", которым пациента облучают с использованием множества гамма-лучей пониженной интенсивности и которые сходятся с большей интенсивностью и высокой точностью в целевой области (например, на опухоли). В другом примере, радиотерапия предоставляется с использованием линейного ускорителя ("linac"), посредством которого целевая область облучается высокоэнергетическими частицами (например, электронами, протонами, ионами, высокоэнергетическими фотонами, и т.п.). Местонахождение пучка и доза пучка излучения тщательно контролируется для подачи предписанной дозы излучения на целевую область. Пучок излучения также обычно контролируется для уменьшения или минимизации повреждения окружающей здоровой ткани, такой, которая может обозначаться "как орган(-ы) риска" (OAR). Излучение может обозначаться как "предписанное", поскольку обычно врач предписывает заранее заданную дозу излучения, поставляемую на целевую область, например, на опухоль.
Обычно, ионизирующее излучение в форме коллимированного пучка направляется от внешнего источника излучения к пациенту. Модуляция пучка излучения может быть обеспечена одним или более аттенюаторами или коллиматорами (например, многолепестковым коллиматором). Интенсивность и форма пучка излучения могут быть отрегулированы коллимацией, избегая повреждения здоровой ткани (например, OAR), смежной с целевой тканью, приспосабливая проектируемый пучок к профилю целевой ткани.
Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации целевой области (например, опухоли), а также для идентификации критических органов вблизи опухоли. Создание плана лечения может быть трудоемким процессом, при котором планировщик пытается привести в соответствие различные показатели лечения или ограничения (например, показатели по гистограмме доза-объем (DVH) или другие ограничения), например, учет важности (например, взвешивание) соответствующих ограничений для выработки клинически приемлемого плана лечения. Эта задача может оказаться отнимающим много времени процессом проб и ошибок, который усложняется различными органами риска (OAR), поскольку с увеличением числа OAR (например, приблизительно тринадцать при лечении головы и шеи), увеличивается и сложность процесса. Отдаленные от опухоли OAR можно легче уберечь от излучения, но OAR близкие или перекрывающиеся с целевой опухолью, может оказаться труднее защитить от лучевого воздействия во время лечения.
Обычно, для каждого пациента, изначальный план лечения может быть создан "автономным" образом. План лечения может быть разработан задолго до доставки лучевой терапии, например, с использованием одной или более медицинских методик визуализации. Информация о визуализации может включать в себя, например, изображения, полученные с помощью рентгеновских лучей, компьютерной томографии (CT), ядерного магнитного резонанса (MR), позитронно-эмиссионной томографии (PET), одно-фотонной эмиссионной компьютерной томографии (SPECT) или ультразвука. Поставщик медицинских услуг, например, врач, может использовать информацию о трехмерной визуализации, указывающей на анатомию пациента, для идентификации одной или более целевых опухолей, наряду с органами риска вблизи опухоли. Поставщик медицинских услуг может обозначить целевую опухоль, которая должна получить предписанную лучевую дозу, используя ручную методику, и поставщик медицинских услуг может подобным же образом обозначить соседнюю ткань, такую как органы, из-за опасности повреждения от лечения облучением.
Альтернативно или дополнительно, автоматизированный инструмент (например, ABAS, предоставляемый фирмой Elekta AB, Швеция) может быть использован для помощи в идентификации или для обозначения целевой опухоли и органов риска. Затем может быть создан план лечения лучевой терапией ("план лечения"), используя методику оптимизации, основанную на клинических и дозиметрических показаниях и ограничениях (например, максимальной, минимальной и средней дозах излучения для опухоли и критических органов).
Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации целевой области (например, опухоли), а также для идентификации критических органов вблизи опухоли. Создание плана лечения может быть трудоемким процессом, при котором планировщик пытается привести в соответствие различные показания лечения или ограничения (например, показания по гистограмме доза-объем (DVH)), например, учет их индивидуальной важности (например, взвешивание) для выработки клинически приемлемого плана лечения. Эта задача может оказаться отнимающим много времени процессом проб и ошибок, который усложняется различными органами риска (OAR), поскольку с увеличением числа OAR (например, приблизительно тринадцать для лечения головы и шеи), увеличивается и сложность процесса. Отдаленные от опухоли OAR можно легче уберечь от излучения, но может оказаться труднее защитить OAR близкие, или перекрывающиеся с целевой опухолью.
План лечения может выполняться позднее посредством помещения пациента на место и поставляя предписанную лучевую терапию. План лучевой терапии может включать в себя "фракционирование" дозы, в соответствии с чем, последовательность сеансов лучевой терапии предоставляется в течение заданного промежутка времени (например, 45 фракций или некоторый другой полный отсчет фракций), например, с каждой доставкой терапии, включающей в себя заданную фракцию полной предписанной дозы. Во время лечения, положение пациента или положение целевой области относительно облучающего пучка оказывается важным, поскольку такое позиционирование частично определяет то, что облучается целевая область или здоровая ткань.
КРАТКОЕ ОПИСАНИЕ
В одном подходе ядерно-магнитно-резонансная (MR) визуализация может быть объединена с системой лучевой терапии так, чтобы обеспечить информацию о визуализации для адаптации или наведения лучевой терапии. Пример такой объединенной системы в целом может быть обозначен как "MRI-linac", содержащий систему MR визуализации наряду с линейным ускорителем в качестве источника энергии для лучевой терапии. В иллюстративном примере получение изображений может быть выполнено именно перед инициированием доставки заданной фракции лучевой терапии. Такая визуализация может обеспечить информацию, полезную для идентификации положения целевой области или для идентификации движения целевой области. Такая одновременная визуализация в целом может быть обозначена как визуализация в "режиме реального времени", но обычно имеется время запаздывания или время задержки между получением изображения и доставкой лучевой терапии.
Изобретатели обнаружили, что, помимо прочего, имеется проблема в использовании 3D MR визуализации для планирования или адаптации лучевой терапии. Например, реконструкция изображения визуализируемой объемной области может подвергнуться нежелательному воздействию, когда целевая область находится под влиянием дыхательного движения или другого движения, поскольку продолжительность визуализации ("время визуализации") обычно достаточно велика, что делает существенным влияние такого движения. Кроме того, время запаздывания при получении изображения или большая продолжительность получения изображения могут быть проблематичными, поскольку целевая область может быть значительно деформирована или может быть перемещена между получением 3D MR изображения и последующей доставкой лучевой терапии.
В одном из подходов, когда движение целевой области является периодическим, может быть использована методика четырехмерной MR визуализации, например, перед лучевым лечением. Например, получение изображений может быть синхронизировано с физиологическим циклом, например, посредством считывания суррогатной информации. Примеры суррогатов включают в себя сигнал, считываемый с использованием респиратора или одномерного (1D) эхо-навигатора, указываемого MR визуализацией. Элементы MR визуализации, такие как получаемые срезы визуализации, могут быть отсортированы в бины, используя информацию, указывающую на фазу или амплитуду физиологического цикла или суррогата, коррелированного с таким циклом. Однако такой подход также может иметь ограничения. Например, обычно доступная методика 4D визуализации на основе срезов (такая как непроекционная MR визуализация) не включает в себя использование анатомического ориентира, такого как местоположение диафрагмы, для сортировки или биннинга получаемых трехмерных изображений относительно физиологического цикла. Вместо этого, обычно доступная методика 4D визуализации получает изображения последовательно, и полученные изображения содержат различные участки тела и имеют недостаток общих анатомических особенностей по каждому изображению. И напротив, подход с проекционной визуализацией может включать в себя выбор или создание проекционных изображений, имеющих общую анатомическую особенность в каждом изображении, так что общая особенность может быть использована для облегчения биннинга. Даже если другое перспективное изображение особенности присутствует в каждом из проекционных изображений (например, различные виды особенности), такое отслеживание особенности для биннинга может все же использоваться в подходе с проекционными изображениями. Таким образом, в отличие от обычно доступной методики 4D MR визуализации суррогат (такой как внешний суррогат) не требуется.
Обычно-используемый протокол 4D MR визуализации также включает в себя относительно большие времена сбора информации и может создавать временные препятствия в таких применениях, где обновление визуализации выполняется перед каждой фракцией лечения лучевой терапией. Кроме того, методики 4D MR визуализации не обязательно могут отображать или спрогнозировать анатомическое состояние визуализируемого субъекта в течение последующей доставки лучевой терапии. Например, дрейф базовой линии, деформации или изменения частоты или фазы физиологического цикла могут произойти между временем, при котором получается информация о 4D MR визуализации, и более поздней доставкой лучевой терапии.
В другом подходе информация о визуализации, указывающая на внутри фракционное движение целевой области или других участков визуализируемого субъекта, может включать в себя визуализацию только участка визуализируемого субъекта, не требуя полной объемной визуализации, такого как получение двумерных (2D) срезов визуализации, например, через целевую область вдоль различных направлений (например, содержащая в себя получения последовательности ортогональных срезов). Такие срезы могут быть использованы, чтобы способствовать локализации целевой области или другой части тела обычно для доставки лучевой терапии. Такой локализации можно частично способствовать, используя одну или более сегментаций изображения или методик регистрации изображения. Однако такой подход также может иметь ограничения. Например, MR визуализация последовательностей импульсов, используемых для получения 2D срезов, может быть отличной от используемой для получения при предварительном лечении внутри фракционной объемной 3D или 4D "опорной" визуализации. Такие различные последовательности импульсов могут осуществлять регистрацию между получением изображения 2D срезов и ранее полученным объемным опорным изображением. Другое ограничение заключается в том, что информация вне срезов теряется, так как в примере, где имеются множественные органы риска (OAR) или если ретроспективные вычисления дозы должны быть выполнены посредством получения информации о визуализации во время лечения. Еще одно ограничение использования 2D срезов визуализации заключается в том, что может оказаться затруднительным ориентировать срезы при движении мишени, в частности, если движение изменяется между физиологическими циклами, например, между циклами дыхания. Маленькие мишени, такие как опухоли, могут быть искажены или могут полностью исчезнуть из конкретного получаемого среза визуализации.
Авторы заявки нашли решение упомянутых выше ограничений. Такое решение может включать в себя использование подхода с MR проекционной визуализацией. Такой подход с проекционной визуализацией может быть использован между фракциями. Альтернативно или дополнительно, MR проекционная визуализация может быть использована подобным образом для моделирования визуализации, используемой для планирования лечения или для визуализации предварительного лечения (например, "опорной"), выполняемого между фракциями для сдвига пациента или для адаптации плана лечения до доставки лечения. Использование MR проекционной визуализации для модельной визуализации, опорной визуализации предварительного лечения и более поздней визуализации внутри фракций может обеспечить последовательность и легкость регистрации или другой обработки. MR проекционная визуализация также может предоставить информацию о визуализации таким образом, который лучше коррелирует с проекцией со стороны пучка (BEV) портальной визуализации или рентгеновской методикой, не подвергая визуализируемый субъект ионизирующему излучению во время визуализации. Получение 2D MR проекционных изображений может значительно уменьшить время запаздывания при получении визуализации по сравнению с другими подходами, такими как полная трехмерная объемная MR визуализация, а 2D проекционные изображения могут быть сгруппированы для предоставления информации об объемной визуализации, используя томографическую методику или методику Фурье пространства (k-пространство), например. Информация из полученных 2D MR проекционных изображениях или от 3D или 4D визуализации, созданной из 2D MR проекционных изображений, может сравниваться с информацией об опорной визуализации, так чтобы локализовать целевую область или анатомические ориентиры, или чтобы прогнозировать более позднее местоположение целевой области. Таким образом, информация, указывающая на целевую область, может быть использована для адаптации лучевой терапии.
В соответствии с различными примерами описанные здесь устройство и методики могут быть использованы для контроля доставки лучевой терапии к субъекту, используя методику проекционной визуализации. Например, может быть принята опорная визуализация, например, включающая в себя информацию о визуализации, полученную ранее в связи с планированием лечения лучевой терапией. Двумерное (2D) проекционное изображение может быть создано, используя информацию о визуализации, полученную с помощью ядерной магнитно-резонансной (MR) визуализации, причем 2D проекционное изображение соответствует заданному проекционному направлению, включающему в себя траекторию, пересекающую по меньшей мере участок визуализируемого субъекта. Может быть определено изменение между создаваемым 2D проекционным изображением и информацией об опорной визуализации. Доставка лучевой терапии может контролироваться, по меньшей мере частично (например, адаптивным образом) используя определенное изменение между полученным 2D проекционным изображением и информацией об опорной визуализации.
Изобретатели также обнаружили, что информация об опорной визуализации может быть получена, используя методику проекционной визуализации, например, как для использования в пространственно-регистрируемых получаемых позднее проекционных изображениях с полученной ранее информацией о визуализации. В соответствии с различными примерами описанные здесь устройство и методики могут быть использованы для создания информации о четырехмерной (4D) или другой визуализации, например, во время получения одного или более опорных изображений перед лучевой терапией (например, опорной визуализации), или позднее, например, непосредственно перед или во время доставки лучевой терапии (например, визуализации внутри фракций). Создание информации о 4D визуализации может включать в себя создание двух или более двумерных (2D) изображений, содержащих проекционные изображения, представляющие различные проекционные углы, где 2D изображения создаются с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации. Конкретные 2D изображения могут быть назначены бинам, по меньшей мере частично используя информацию, указывающую на временные положения в пределах физиологического цикла, соответствующего конкретным 2D изображениям. Трехмерные (3D) изображения могут быть построены, используя отсортированные по бинам 2D изображения. Группа трехмерных изображений может быть объединена, так чтобы обеспечить информацию о 4D визуализации.
Этот обзор предназначен для предоставления общего рассмотрения объекта изобретения данной патентной заявки. Он не предназначен для предоставления исключительного или исчерпывающего объяснения изобретения. Подробное описание включено для предоставления дополнительной информации о данной патентной заявке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1A иллюстрирует в общих чертах пример системы лучевой терапии, которая может включать в себя вывод лучевой терапии, выполненный с возможностью подачи терапевтического пучка.
Фиг.1B иллюстрирует общий вид с частичным разрезом примера системы, которая включает в себя объединенную систему лучевой терапии и ядерную магнитно-резонансную (MR) систему визуализации.
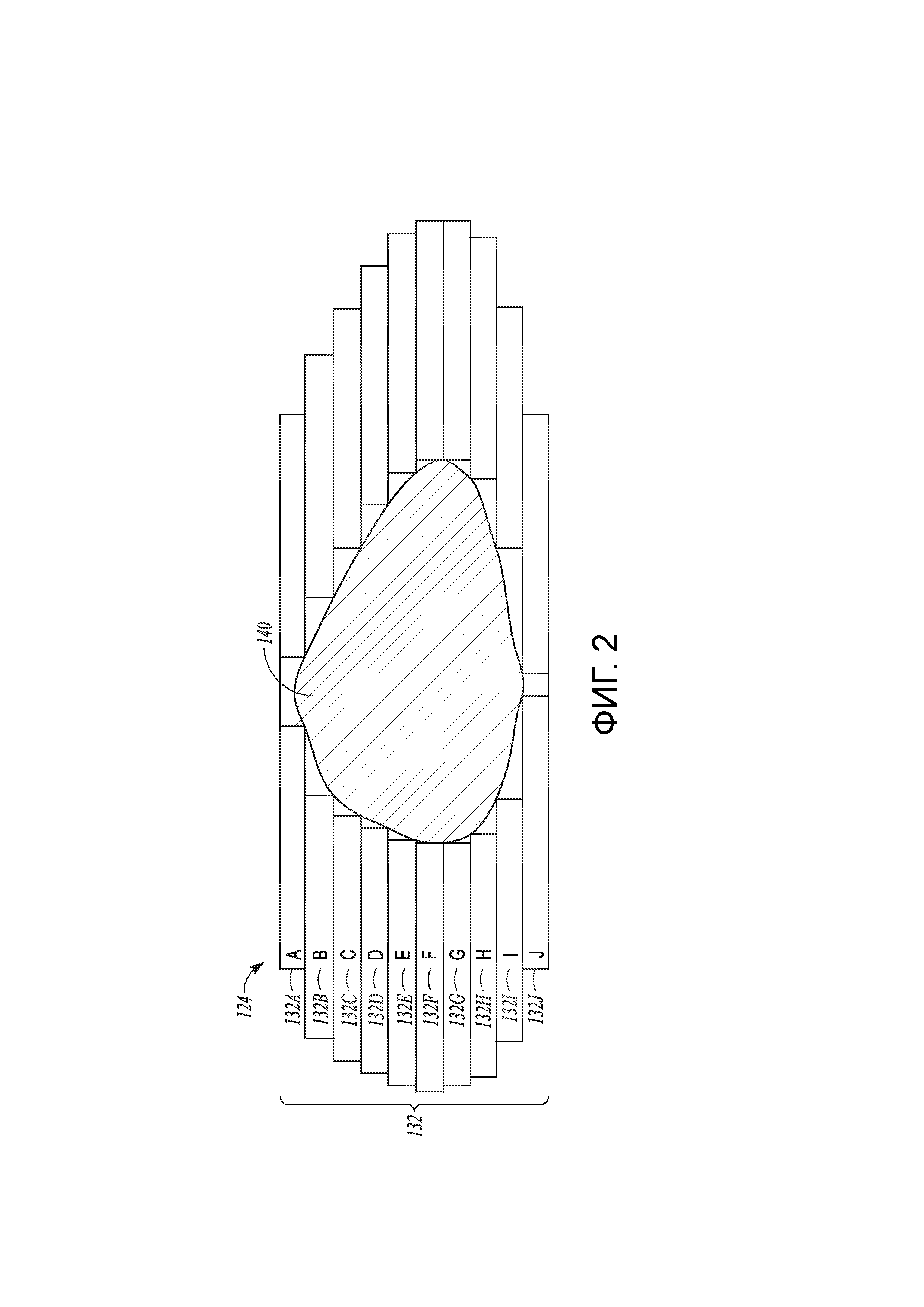
Фиг.2 иллюстрирует общий вид примера конфигурации коллиматора, например такой, которая частично может быть использована для формирования или коллимации пучка лучевой терапии.
Фиг.3 иллюстрирует общий вид примера системы лучевой терапии, например такой, которая может включать в себя устройство лучевой терапии и устройство сбора данных о визуализации.
Фиг.4 иллюстрирует общий вид примера системы, которая может быть использована для одного или более сборов данных о визуализации, сегментации изображения, целевого прогнозирования, контроля терапии или регулирования терапии.
Фиг.5 иллюстрирует общий вид примера системы, которая может включать в себя контроллер лучевой терапии, имеющий ввод визуализации, генератор лучевой терапии и вывод лучевой терапии.
Фиг.6 иллюстрирует общий вид методики, такой как способ, который может включать в себя использование MR визуализации для возбуждения области визуализируемого субъекта, задающей срез визуализации, и получения значения пикселя, соответствующего одномерной проекционной линии через срез.
Фиг.7A иллюстрирует общий вид методики, такой как способ, который может включать в себя возбуждение области визуализируемого субъекта, используя возбуждающую последовательность двумерной (2D) MR визуализации.
Фиг.7B иллюстрирует общий вид другой методики, такой как способ, который может включать в себя возбуждение области визуализируемого субъекта, используя возбуждающую последовательность двумерной (2D) MR визуализации.
Фиг.8A и 8B иллюстрируют общий вид методики, такой как способ, который может включать в себя создание двумерных (2D) MR проекционных изображений, представляющих различные проекционные углы, и использование таких 2D проекционных изображений для создания трехмерных (3D) изображений.
Фиг.9 иллюстрирует общий вид методики, такой как способ, который может включать в себя создание двумерного (2D) проекционного изображения, используя MR визуализацию и определение изменения между созданным 2D проекционным изображением и информацией об опорной визуализации.
Фиг.10A иллюстрирует общую пространственную конфигурацию ориентации пучка лучевой терапии относительно одного или более проекционных направлений, которая может включать в себя два проекционных направления, ориентированных ортогонально друг к другу.
Фиг.10B иллюстрирует общую пространственную конфигурацию проекционных направлений MR визуализации, которая соответствует проекционным углам, охватывающим дугу или окружность вокруг заданной области, такой как изоцентр лечения лучевой терапией.
Фиг.10C иллюстрирует общую пространственную конфигурацию проекционного направления MR визуализации, например, ориентированную под заданным углом относительно направления пучка лучевой терапии
Фиг.10D иллюстрирует общую пространственную конфигурацию проекционных направлений MR визуализации, которая может быть задана для предоставления MR проекционных изображений подобно стереоскопической рентгеновской визуализации.
На чертежах, которые не обязательно приведены в масштабе, подобные цифровые обозначения могут обозначать подобные компоненты на различных видах. Подобные цифровые обозначения, имеющие различные буквенные символы, могут представлять различные варианты подобных компонентов. На чертежах показаны в целом и посредством примера, но не для ограничения, различные варианты осуществления, обсуждаемые в данном документе.
ПОДРОБНОЕ ОПИСАНИЕ
На Фиг.1A показан общий вид примера системы 102 лучевой терапии, которая может включать в себя вывод 104 лучевой терапии, выполненный с возможностью подачи терапевтического пучка 108. Вывод 104 лучевой терапии может включать в себя один или более аттенюаторов или коллиматоров, таких как многолепестковый коллиматор (MLC), как описано в иллюстративном примере с Фиг.2. Обращаясь снова к Фиг.1A, пациент может быть расположен в области 112, например, на платформе 116 (например, на столе или на кушетке) для приема предписанной дозы лучевой терапии в соответствии с планом лечения лучевой терапией.
Вывод 104 лучевой терапии может быть расположен на гентри 106 или на другой механической опоре, так чтобы вращать вывод 104 лучевой терапии вокруг оси ("A"). Одна или более платформ 116 или выводов 104 лучевой терапии могут быть перемещаемыми в другие местоположения, например, могут перемещаемыми в поперечном направлении ("T") или в боковом направлении ("L"). Другие степени свободы также возможны, например, вращение вокруг одной или более других осей, например, вращение вокруг поперечной оси (обозначенной как "R").
Система координат (включающая в себя оси A, T, и L), показанная на Фиг.1A, может иметь начало, расположенное в изоцентре 110. Изоцентр может быть задан как местоположение, где пучок 108 лучевой терапии пересекает начало координатной оси, чтобы поставить предписанную лучевую дозу в местонахождение пациента или в пределах пациента. Например, изоцентр 110 может быть задан как местоположение, где пучок 108 лучевой терапии пересекает пациента для различных поворотных положений вывода 104 лучевой терапии, который позиционируется посредством гентри 106 вокруг оси A.
В примере, детектор 114 может быть расположен в пределах поля терапевтического пучка 108, так чтобы включать в себя плоский панельный детектор (например, прямой детектор или сцинтилляционный детектор). Детектор 114 может быть установлен на гентри 106 напротив вывода 104 лучевой терапии, так чтобы поддерживать ориентацию с терапевтическим пучком 108, когда гентри 106 поворачивается. Таким образом, детектор 114 может быть использован для контроля терапевтического пучка 108 или детектор 114 может быть использован для визуализации, например, для портальной визуализации проекции пучка 108 через область 112. Область 112 может задавать плоскость, а проекция терапевтического пучка 108 в области 112 может обозначаться как проекция области 112 "со стороны пучка".
В иллюстративном примере одна или более платформ 116, вывод 104 для терапии или гентри 106 могут быть позиционированы автоматически, а вывод 104 для терапии может устанавливать терапевтический пучок 108 в соответствии с заданной дозой для конкретного случая доставки терапии. Последовательность сеансов доставки терапии может быть задана в соответствии с планом лечения лучевой терапией, например, используя одну или более различных ориентаций или местоположений гентри 106, платформы 116 или вывода 104 для терапии. Терапевтические доставки дозы могут происходить последовательно, но могут перекрываться в требуемой целевой области на пациенте или в пределах пациента, например, в изоцентре 110. Предписанная совокупная доза лучевой терапии может быть, тем самым, поставлена к целевой области, тогда как повреждение ткани вблизи целевой области, например, у одного или более органов риска, уменьшается или исключается.
Как отмечено здесь относительно других примеров, система 102 лучевой терапии может включать в себя или может быть связана с системой сбора данных о визуализации, например, для предоставления одного или более из ядерной магнитно-резонансной (MR) визуализации или для рентгеновской визуализации, например, может включать в себя визуализацию компьютерной томографией (CT). В примере, информация o MR визуализации или другая информация о визуализации может быть использована для создания информации о визуализации или визуализаций, эквивалентных CT визуализации, не требуя фактической CT визуализации. Такая визуализация может обозначаться как "псевдо-CT" визуализация.
На Фиг.1B показан общий вид примера системы с частичным разрезом, которая включает в себя объединенную систему 102 лучевой терапии и систему 130 ядерной магнитно-резонансной (MR) визуализации. Система 130 MR визуализации может быть выполнена с возможностью задавать "тоннель" вокруг оси ("A"), и система лучевой терапии может включать в себя вывод 104 лучевой терапии, так чтобы обеспечить пучок 108 лучевой терапии, направленный к изоцентру 110 в пределах тоннеля вдоль оси A. Вывод 104 лучевой терапии может включать в себя коллиматор 124, так чтобы направлять один или более контролируемых или формируемых пучков 108 лучевой терапии к целевой области в пределах пациента. Пациент может поддерживаться платформой, например, платформой, позиционируемой вдоль одного или более направлений: осевого направления A, бокового направления, L, или поперечного направления T. Один или более участков системы 102 лучевой терапии могут быть установлены на гентри 106, так чтобы вращать вывод 104 лучевой терапии вокруг оси A.
На Фиг.1A и Фиг.1B показаны общие примеры, включающие в себя такую конфигурацию, когда вывод терапии может поворачиваться вокруг центральной оси (например, оси "А"). Могут быть использованы другие конфигурации вывода лучевой терапии. Например, вывод лучевой терапии может быть установлен на робототехнической руке или на манипуляторе, которые имеют множественные степени свободы. В еще одном примере, вывод терапии может быть зафиксирован, например, может быть расположен в области, отделенной в сторону от пациента, а платформа, поддерживающая пациента, может быть использована для ориентации изоцентра лучевой терапии относительно заданной целевой области в пределах пациента.
На Фиг.2 показан общий вид примера конфигурации 132 многолепесткового коллиматора (MLC), который может быть использован частично для формирования или для коллимации пучка лучевой терапии. На Фиг.2, лепестки 132A-132J могут быть автоматически установлены для задания апертуры, аппроксимирующей сечение или проекцию опухоли 140. Лепестки 132A-132J могут быть выполнены из материала, пригодного для поглощения или блокировки радиационного пучка в областях, отличных от апертуры, в соответствии с планом лучевого лечения. Например, лепестки 132A-132J могут включать в себя металлические пластины, например, содержащие вольфрам, с длинной осью пластин, ориентированной параллельно направлению пучка, и имеющие концы, ориентированные ортогонально к направлению пучка (как показано в плоскости иллюстрации на Фиг.2).
"Состояние" MLC 132 может быть отрегулировано адаптивно в течение курса лучевой терапии, так чтобы установить терапевтический пучок, который лучше приближает форму или местоположение опухоли 140 или другой целевой области по сравнению с использованием конфигурации статического коллиматора или по сравнению с использованием конфигурации MLC 132, определяемой исключительно с использованием методики планирования "автономной" терапии. Методика лучевой терапии, включающая в себя использование MLC 132 для получения заданного распределения лучевой дозы для опухоли или для определенных областей в пределах опухоли, может обозначаться как лучевая терапия с модулированной интенсивностью (IMRT). Как описано здесь относительно других примеров, визуализация может быть выполнена для локализации целевой области или для определения или прогнозирования перспективного изображения целевой области из позиции пучка лучевой терапии для адаптивного наведения терапии.
На Фиг.3 показан общий вид примера системы 300 лучевой терапии, которая может включать в себя устройство 330 лучевой терапии и устройство сбора данных о визуализации. Система 300 лучевой терапии может включать в себя обучающий модуль 312, прогнозирующий модуль 314, обучающую базу данных 322, тестирующую базу данных 324, устройство 330 лучевой терапии и устройство 350 сбора данных о визуализации. Система 300 лучевой терапии также может быть соединена с системой (TPS) 342 планирования лечения и системой онкологической информации (OI) 344, которые могут предоставить информацию о пациенте. Кроме того, система 300 лучевой терапии может включать в себя устройство отображения и пользовательский интерфейс.
На Фиг.4 показан общий вид примера системы 400, которая может быть использована для одной или более визуализаций, сегментации изображения, целевого прогнозирования, контроля терапии или регулирования терапии. В соответствии с некоторыми вариантами осуществления система 400 может быть одной или более из высокоэффективных вычислительных устройств, пригодными для идентификации, анализа, поддержания, создания или предоставления больших количеств данных, согласующихся с раскрытыми вариантами осуществления. Система 400 может быть автономной или она может быть частью подсистемы, которая в свою очередь может быть частью большей системы. Например, система 400 может представлять собой распределенные высокоэффективные серверы, которые удаленно расположены и обмениваются информацией по сети, например, по Интернету, или по специализированной сети, например, по локальной сети (LAN) или глобальной сети (WAN). В некоторых вариантах осуществления система 400 может включать в себя встроенную систему, визуализирующий сканер (например, ядерный магнитно-резонансный (MR) сканер или другой сканер, например, сканер компьютерной томографии (CT)) и/или устройство отображения с сенсорным экраном в связи с одним или более удаленно расположенными высокоэффективными вычислительными устройствами.
В одном варианте осуществления система 400 может включать в себя один или более процессоров 414, одно или более устройств памяти 410 и один или более интерфейсов 415 связи. Процессор 414 может быть схемой процессора, включающей в себя одно или более универсальных устройств обработки, например, микропроцессор, центральный процессор (CPU), процессор графических символов (GPU) или нечто подобное. В частности, процессор 414 может быть микропроцессором со сложным набором системных команд (CISC), микропроцессором с сокращенным набором системных команд (RISC), микропроцессором с очень длинным командным словом (VLIW), процессором, осуществляющим другие системы команд, или процессором, осуществляющим комбинацию систем команд.
Процессор 414 также может быть одним или более устройств обработки специального назначения, например, специальной прикладной интегральной схемой (ASIC), полевой программируемой вентильной матрицей (FPGA), процессором цифровых сигналов (DSP), "системой на кристалле" (SoC) или чем-то подобным. Как должно быть ясно специалистам в области техники, в некоторых вариантах осуществления процессор 414 может быть процессором специального назначения, а не универсальным процессором. Процессор 414 может включать в себя одно или более известных устройств обработки, например, микропроцессор из семейства Pentium™ или Xeon™, изготавливаемого фирмой Intel™, семейства Turion™, изготавливаемого AMD™, или любым из различных процессоров, изготавливаемых другими фирмами, например, Oracle™ (например, процессор архитектуры SPARC™). Процессор 414 также может включать в себя графические процессоры, изготовленные фирмой Nvidia ™. Раскрытые варианты осуществления не ограничиваются каким-либо типом процессора(-ов), выполненных другим образом для удовлетворения вычислительных требований идентификации, анализа, поддержания, создания и/или обеспечения больших количеств данных о визуализации или данных любого другого типа, согласующихся с раскрытыми вариантами осуществления.
Память 410 может включать в себя одно или более запоминающих устройств, выполненных с возможностью хранения машиноисполняемых команд, используемых процессором 414 для выполнения функций, относящихся к раскрытым вариантам осуществления. Например, память 410 может хранить машиноисполняемые программные команды для программного обеспечения 411 планирования лечения, программного обеспечения операционной системы 412 и программного обеспечения обучения/прогнозирования 413. Процессор 414 может быть соединен с возможностью связи с устройством памяти/запоминающим устройством 410 и процессор 414 может быть предназначен для исполнения машиноисполняемых команд, сохраняемых на них для выполнения одной или более операций, согласующихся с раскрытыми вариантами осуществления. Например, процессор 414 может выполнить программное обеспечение обучения/прогнозирования 413 для осуществления функциональных возможностей обучающего модуля 312 и прогнозирующего модуля 314. Кроме того, процессорное устройство 414 может выполнять программное обеспечение 411 планирования лечения (например, такое как Monaco®, предоставленное Elekta), которое может взаимодействовать с программным обеспечением 413 обучения/ прогнозирования.
Раскрытые варианты осуществления не ограничиваются разделением программ или компьютеров, предназначенных для выполнения специализированных задач. Например, память 410 может включать в себя единственную программу, которая выполняет функции системы 400, или множественные программы (например, программное обеспечение 411 планирования лечения и/или программное обеспечение 413 обучения/прогнозирования). Кроме того, процессор 414 может выполнять одну или более программ, расположенных удаленно от системы 400, например, программы, сохраняемые в базе данных 420, и такие удаленные программы могут включать в себя системное программное обеспечение онкологической информации или программное обеспечение планирования лечения. Память 410 также может хранить данные изображения или любой другой тип данных/информации в любом формате, который система может использовать для выполнения операций, согласованных с раскрытыми вариантами осуществления.
Интерфейс 415 связи может быть одним или более устройствами, выполненными с возможностью приема и/или передачи данных системой 400. Интерфейс 415 связи может включать в себя одно или более цифровых и/или аналоговых устройств связи, которые позволяют системе 400 обмениваться данными с другими машинами и устройствами, например, с удаленно расположенными компонентами системы 400, базой данных 420, или базой данных 430 больницы. Например, процессор 414 может быть соединен с возможностью связи с базой(-ами) данных 420 или базой(-ми) данных 430 больницы через интерфейс связи 415. Например, интерфейс 415 связи может быть компьютерной сетью, например, Интернетом, или специализированной сетью, например, LAN или глобальной сетью. Альтернативно, интерфейс 415 связи может быть спутниковой линией связи или любой формы цифровой или аналоговой линией связи, которая позволяет процессору 414 посылать/принимать данные на/от любой базы(-аз) данных 420, 430.
База(-ы) данных 420 и база(-ы) данных 430 больницы могут включать в себя одно или более устройств памяти, которые хранят информацию и предоставляют доступ и управляются через систему 400. Посредством примера, база(-ы) данных 420, база(-ы) данных 530 больницы или обе, могут включать в себя соответственные базы данных, например, базы данных Oracle™, базы данных Sybase ™ или другие, и могут включать в себя несоответственные базы данных, например, файловые последовательности Hadoop, HBase, Cassandra или другие. Базы данных или другие файлы могут включать в себя, например, одно или более из первичных данных от MR сканов или CT сканов, связанных с визуализируемым субъектом, например, для обучения или для предоставления опорного изображения, MR характеристических векторов, информации о MR проекционной визуализации, CT значений, характеристических векторов пониженной размерности, модель(-ей) прогнозирования псевдо-CT, значения(-й) псевдо-CT, изображений псевдо-CT, данных DICOM, и т.д. Однако системы и способы по раскрытым вариантам осуществления не ограничиваются отделением баз данных. В одном аспекте система 400 может включать в себя базу(-ы) данных 420 или базу(-ы) данных 430 больницы. Альтернативно, база(-ы) данных 420 и/или база(-ы) данных 430 больницы может быть расположена удаленно от системы 400. База(-ы) данных 420 и база(-ы) данных 430 больницы могут включать в себя вычислительные компоненты (например, систему управления базой данных, сервер базы данных, и т.д.), выполненные с возможностью приема и обработки запросов для данных, сохраняемых в устройствах памяти базы(-аз) данных 420 или базы(-аз) данных 430 больницы и для предоставления данных из базы(-аз) данных 420 или базы(-аз) данных 430 больницы.
Система 400 может обмениваться данными с другими устройствами и компонентами системы 400 по сети (не показано). Сеть может быть сетью любого типа (включая в себя инфраструктуру), которая обеспечивает связи, обмены информацией или облегчает обмен информацией и допускает посылку и прием информации между другими устройствами и/или компонентами системы 400 по сети (не показано). В других вариантах осуществления один или более компонентов системы 400 могут обмениваться данными непосредственно через специализированный канал(-ы) связи, например, канал (например, аппаратной связи, беспроводной связи, или спутниковой связи, или другой канал связи) между системой 400 и базой(-ами) данных 420 и базой(-ами) данных 430 больницы.
Конфигурация и границы функциональных структурных элементов системы 400 были заданы здесь для удобства описания. Могут быть заданы альтернативные границы, если их указанные функции и соотношения соответственно выполнены. Альтернативы (включающие в себя эквиваленты, расширения, вариации, отклонения, и т.д., описанного здесь) будут очевидны специалистам в области техники(-ик) на основании содержащегося здесь раскрытия.
На Фиг.5 показан общий вид примера системы 500, которая может включать в себя систему 554 контроллера лучевой терапии, имеющего ввод 560 визуализации, генератор 556 лучевой терапии, и вывод 504 лучевой терапии. Генератор 556 терапии может включать в себя ускоритель, например, линейный ускоритель, или другой источник излучения, а вывод 504 терапии может быть связан с генератором 556 терапии для обработки пучка энергичных фотонов или частиц, обеспечиваемых генератором 556 терапии. Например, вывод 504 терапии может включать в себя или может быть связан с приводом 566 вывода для одного или более из поворота или поступательного перемещения вывода 504 терапии для обеспечения пучка лучевой терапии, направленного на требуемую целевую область. Вывод 504 терапии может включать в себя коллиматор 564, например, многолепестковый коллиматор, как отмечено выше относительно Фиг.2. Обращаясь снова к Фиг.5, система 554 контроллера терапии может быть выполнена с возможностью контроля одного или более из генератора 556 терапии, вывода 504 терапии или привода 516 положения пациента (например, подвижной платформы, включающей в себя кушетку или стол), используя адаптивную методику лучевого лечения, как описано здесь в других примерах.
Система 554 контроллера терапии может быть связана с одним или более датчиками, например, с использованием ввода 562 датчика. Например, датчик 558 пациента может выдавать физиологическую информацию на систему контроллера терапии, например, информацию, указывающую на одно или более из дыхания (например, используя плетизмографический датчик или респиратор), сердечной механической или электрической деятельности пациента, периферийной циркулирующей деятельности, положения пациента или движения пациента. Такая информация может обеспечивать "суррогат", коррелированный с движением одного или более органов или других областей, на которые должен нацеливаться вывод 504 терапии. Такая информация может быть использована для контроля терапии, например, для синхронизации терапии или содействия "биннингу" получаемой информации о визуализации в соответствии с одним или более из определенного фазового или амплитудного диапазона физиологического цикла, как указывается получаемой информацией от датчика 558.
Ввод визуализации 560 может быть связан с системой 550 визуализации (например, включающей в себя компьютерную томографическую систему визуализации или ядерную магнитно-резонансную (MR) систему визуализации в качестве иллюстративных примеров). Альтернативно или дополнительно, система 554 контроллера терапии может принимать информацию о визуализации от накопителя 552 данных о визуализации, например, от централизованной базы данных о визуализации или от сервера визуализации. Одно или более из системы 554 контроллера терапии или системы 550 визуализации могут включать в себя элементы, показанные и описанные относительно системы 400, показанной на Фиг.4.
Обычно доступное оборудование лучевой терапии может быть использовано для получения проекционных изображений, используя методики рентгеновской визуализации. Например, системы с линейным ускорителем (linac) могут получать рентгеновские проекционные изображения, используя один или более мегавольтных (МВ) лечебных пучков, объединенных с портальным устройством визуализации (таким, как показан для иллюстрации на Фиг.1A) или используя один или более отдельных киловольтных (кВ) рентгеновских источников. В примере киловаттный рентгеновский источник может быть установлен на гентри, например, ориентированным под углом 90 градусов относительно ориентации пучка для лечения. В другом примере два независимых рентгеновских источника/пара устройств формирования изображения могут быть расположены для обеспечения стереоскопической рентгеновской визуализации. Проекционные изображения, полученные с использованием рентгеновской визуализации, предоставляют расходящийся рентгеновский пучок из источника визуализации, который может быть обозначен как "точечный источник" или фокальная точка.
До доставки лучевой терапии, например, до конкретной фракции лечения лучевой терапией, могут быть получены изображения рентгеновской компьютерной томографии (CT). Например, методика CT визуализации с коническим пучком (CBCT) может быть использована для получения проекционных изображений под различными проекционными углами во время вращения вокруг визуализируемого субъекта установленного на гентри рентгеновского источника. Трехмерное (3D) изображение может быть реконструировано из таких проекций с коническим пучком. Для визуализации субъектов, которые проявляют существенное движение, например, дыхательное движение, трехмерные CBCT изображения могут быть размыты, поскольку каждая проекция может фиксировать снимок пациента в различной точке в цикле дыхания или другом физиологическом цикле. Чтобы уменьшить размытие из-за движения, может быть использована четырехмерная (4D) CBCT визуализация, например, посредством проекций биннинга, в соответствии с фазой или амплитудой физиологического цикла, соответствующего времени, в котором было получено проекционное изображение.
Помимо прочего изобретатели обнаружили, что ядерные магнитно-резонансные (MR) визуализирующие проекции могут быть получены подобным образом и обработаны так, что сокращается воздействие на визуализируемого субъекта ионизирующим излучением и обеспечивается улучшенный контраст мягкой ткани по сравнению с рентгеновскими методиками визуализации. Помимо прочего изобретатели также обнаружили, что MR проекционные изображения не ухудшаются рассеянным излучением, а направление проекционной визуализации не ограничивается физическими ограничениями, например, необходимостью ориентации под 90 градусов относительно лечебного пучка. Проекционная MR визуализация может быть использована для получения единственной перспективы изображения (например, 2D проекционное изображение) по всей информации, содержащейся в пределах всей глубины возбуждаемой области визуализации, в противоположность использованию относительно тонких срезов 2D MR визуализации, которые захватывают только участок информации в направлении глубины. Проекционная MR визуализация имеет ограничения, например, в том, что информация в получаемом 2D проекционном изображении не локализована в направлении глубины, ортогональном к плоскости проекционного изображения, и структуры, окружающие целевую область, могут казаться частично ее маскирующими.
MR проекционная визуализация с использованием 1D проекционных линий
На Фиг.6 показан общий вид методики 600, такой как способ, которая может включать в себя этап 602 использования MR визуализации для возбуждения области визуализируемого субъекта. Например, может быть использована двумерная (2D) возбуждающая последовательность. На этапе 604, градиент считывания может быть применен к визуализируемому субъекту, и может быть получена одномерная (1D) проекционная линия (например, "луч") через 2D возбуждаемую область. На этапе 606, может быть выбрана другая ось проекционных линий, и 2D область снова возбуждается на этапе 602, и градиент считывания применяется на этапе 604, соответствуя обновленной оси проекционных линий. Что касается вставленных диаграмм на этапе 606, то проекционные линии могут быть установлены как расходящиеся или как параллельные. Например, если используются расходящиеся ориентации проекционных линий, получающееся проекционное изображение, заданное в плоскости 670A, может обеспечить представление проекции, которое подобно проекционным изображениям, произведенным методиками с расходящейся рентгеновской визуализацией, или подобно проекционному изображению, произведенному выходным пучком лучевой терапии во время портальной визуализации. Таким образом, MR проекционная визуализация может быть использована для моделирования рентгеновской визуализации, но с усиленным контрастом и без нежелательного рассеяния, например.
В примере расходящейся MR проекционной визуализации, использующей 1D проекционные линии, 1D проекционные линии могут быть заданы как сходящиеся в местоположении 650, например, как соответствующие местоположению источника пучка лучевой терапии, или как соответствующие местоположению, где обычно постоянно находится источник рентгеновской визуализации. Масштабная и пространственная разрешающая способность информации, заданной в получающемся 2D проекционном изображении, установленном в плоскости 670A, может быть определена расстоянием между местоположением 650 источника и выбранным местоположением плоскости 670A визуализации. Например, первая ориентация 660A проекционной линии может быть ортогональна к плоскости 670A проекционной визуализации, и соответствующая полученная 1D проекционная линия может быть использована для установления значения пикселя в местоположении 680A. Вся информация, полученная вдоль первой проекционной линии, обычно включена и сжата в значение пикселя, таким образом, селективность глубины теряется в направлении вдоль проекционной линии.
Ориентация 660A линии, ортогональная к плоскости 670A проекционной визуализации, обычно обозначается как проекционное "направление" или "угол" даже при том, что в расходящихся примерах, другие ориентации проекционных линий не параллельны. Вторая ориентация 662A проекционных линий может подобным образом установить второе значение пикселя в местоположении 682A, и третья ориентация 664A проекционных линий может подобным образом установить третье значение пикселя в местоположении 684A. В реконструированном изображении местоположения 680A, 682B, и 684B пикселей определяются по меньшей мере частично заданным разделением между местоположением плоскости 670A и местоположением 650 источника. Для достижения большей пространственной разрешающей способности в боковом направлении в плоскости 670A большее число отдельных направлений 1D проекционных линий могут быть получены за счет полной продолжительности получения 2D проекционных изображений, поскольку конкретные полученные 1D проекции группируются для создания полной 2D проекции в плоскости 670A.
В примере с параллельной 1D проекционной линией, как на этапе 606, первая ориентация 660B проекционных линий может быть установлена для выдачи первого значения пикселя в местоположении 680B в получающемся проекционном изображении, заданном в плоскости 670B. Другие параллельные линии 662B и 664B могут быть использованы для выдачи информации для соответствующего местоположения 682B и 684B в проекционном изображении. Как практическое соображение, если исключительно параллельные 1D проекционные линии используются для создания конкретного 2D проекционного изображения, методики на Фиг.7A или Фиг.7B могут обеспечить повышенную эффективность по сравнению с примером с Фиг.6, поскольку 2D проекционное изображение может быть реконструировано непосредственно подавлением срез-селектирующего градиента или посредством использования большой толщины среза (относительно представляющей интерес протяженности по глубине), не требуя возбуждения и считывания конкретных 1D проекционных линий.
Параллельная проекция может обеспечить одно или более из упрощенной геометрии по сравнению с расходящимся вариантом, взаимно-однозначного соответствия между пикселями проекционных изображений и плоскостью, задающей "проекцию со стороны пучка", или более простой томографической реконструкции из множественных проекций. При сравнении рентгеновская CBCT томографическая реконструкция обычно только приблизительна из-за расхождения полученных проекционных изображений с коническим пучком. В примерах или с расходящейся или с параллельной 1D проекционной линией интервал или ориентация проекционных линий не обязательно должны быть однородными и могут быть заданы в зависимости от множества факторов. Например, пространственная разрешающая способность в направлении спрогнозированного движения мишени в пределах поля обзора проекционного изображения и параллельно плоскости проекционного изображения может быть усилена посредством увеличения пространственной частоты проекционных линий в направлении спрогнозированного движения. Аналогично, более кратковременные полные сборы данных могут быть предоставлены при использовании более разреженного набора расходящихся проекционных линий.
Проекционная MR визуализация, использующая 2D возбуждение, не требуя срез- селектирующего градиента, или использующая большую глубину греза, охватывающую представляющую интерес глубину
На Фиг.7A показан общий вид методики 700A, такой как способ, которая может включать в себя возбуждение области визуализируемого субъекта с использованием возбуждающей последовательности двумерной (2D) MR визуализации на этапе 702. На Фиг.7B показан общий вид другой методики 700B, такой как способ, которая также может включать в себя возбуждение области визуализируемого субъекта с использованием возбуждающей последовательности двумерной (2D) MR визуализации на этапе 702.
В примере с Фиг.7A 2D MR проекционное изображение может быть получено на этапе 704A при использовании 2D визуализирующей последовательности, не требуя использования срез-селектирующего градиента (например, импульсная последовательность срез-селектирующего градиента может быть подавлена или исключена) так, чтобы информация в направлении глубины (например, в направлении проекционного изображения и перпендикулярно плоскости образующегося проекционного изображения) была получена на всех глубинах в пределах возбуждаемой области. Такой подход не требует возбуждения и считывания градиентом 1D проекционных линий и может, поэтому, уменьшить продолжительность получения изображений по сравнению с подходом с 1D проекцией в случае, когда желательны параллельные 1D проекционные линии.
В примере с Фиг.7B 2D MR проекционное изображение может быть получено на этапе 704B при использовании 2D визуализирующей последовательности с использованием срез-селектирующего градиента, задающего срез достаточно большой по глубине для охвата по глубине исследуемой области, такой как соответствующая участку или всей протяженности мишени для лучевой терапии в измерении, параллельном проекционному углу. Поскольку толщина среза увеличивается, вертикальный размер среза включает в себя все больший вклад анатомической информации, которая до этого была вне поля по вертикали. Такая информация по глубине сжимается в единственную точку или местоположение пикселя в получающемся 2D проекционном изображении. Методика 700B с Фиг.7B подобным образом предлагает уменьшенную продолжительность получения изображений по сравнению с подходом с 1D проекцией и может обозначаться как подход с проекцией "очень толстого среза".
Данные MR визуализации также могут быть получены в "k-пространстве", отображающем координатное пространство, соответствующее пространственному Фурье преобразованию информации о визуализации. Например, данные о MR визуализации могут быть естественно собраны в k-пространстве, изменяя градиенты изображения; конкретная комбинация x, y и z градиентов обычно соответствует единственной точке в k-пространстве. Последовательно заполняя точки в k-пространстве, тогда может быть применено обратное Фурье Преобразование к представлению k-пространства для создания изображения. Плоскость 2D в k-пространстве соответствует 2D проекции в пространстве изображений. Соответственно, 2D проекция также может быть получена путем сбора точек k-пространства, которые лежат в плоскости в k-пространстве, и создания 2D обратного Фурье Преобразования на плоскости в k-пространстве (срез k-пространства) для получения 2D проекции в пространстве изображений.
Трехмерная (3D) и четырехмерная (4D) визуализация, использующая MR проекционную визуализацию, такую как коррелированную с физиологическим циклом
На Фиг.8A показан общий вид методики 800A, такой как способ, которая может включать в себя создание двумерных (2D) MR проекционных изображений, таких как представляющие различные проекционные углы, и использование таких 2D проекционных изображений для построения трехмерных (3D) изображений. Соответствующая методика 800B показана схематично на Фиг.8B.
На этапе 802A, может быть создан ряд 2D MR проекционных изображений, например, используя одну или более методик, упомянутых в другом месте в настоящем документе, как показано, например, на Фиг.6 (группированием 1D проекционных линий), или как показано на Фиг.7A или Фиг.7B. Что касается Фиг.8B, на этапе 802B, 2D проекционные изображения P1, P2, P3, …, PN могут быть получены под различными проекционными углами. Например, проекционные углы могут быть заданы для фиксации проекционных направлений вокруг визуализируемого субъекта. Затем может быть выполнена томографическая реконструкция для получения трехмерного изображения. Поскольку проекционное направление поворачивается вокруг пациента, методики томографической реконструкции, например, подобные рентгеновским методикам, включающим в себя CT или CBCT реконструкцию, могут быть использованы или для создания нового трехмерного изображения, или для обновления предыдущего трехмерного изображения новой информацией.
Однако движение может вызвать размытие в реконструированных трехмерных изображениях. Соответственно, на Фиг.8A на этапе 804A конкретные полученные 2D проекционные изображения могут быть назначены бинам, используя информацию, указывающую на временное положение в пределах физиологического цикла, например, дыхания. Такой биннинг может быть достигнут, используя информацию, полученную от одного или более из суррогата, внешнего маркера или внутреннего маркера или особенности. Например, для получения информации, указывающей на цикл дыхания, респиратор может быть использован для предоставления сигнала суррогата или может быть прослежено движение диафрагмы в получаемой информации о визуализации.
Что касается Фиг.8B, на этапе 804B f(t) может представлять собой график сигнала, представляющий участок физиологического цикла, например, дыхания. Различные бины, например, фазовые бины φ1, φ2, φ3,..., φn могут быть установлены, как соответствующие участкам (например, интервалу Δt) вдоль f(t). Получаемые 2D проекционные изображения могут быть назначены для бинов φ1, φ2, φ3,..., φn, например, определением участка f(t), на который попадает конкретное получаемое изображение. Использование бинов на основе фазы является только иллюстративным, и амплитудные бины могут быть использованы подобным же образом, например, соответствующими амплитудным интервалам (например, интервал Δf) вдоль f(t).
Что касается Фиг.8A, на этапе 806A трехмерное изображение может быть построено, используя отсортированные в бины последовательности 2D проекционных изображений, соответствующих различным проекционным углам. В контексте Фиг.8B на этапе 806B трехмерные изображения I1, I2, I3, …, In могут соответствовать каждому из бинов φ1, φ2, φ3,..., φn,. Что касается Фиг.8A, на этапе 808A информация о 4D визуализации может быть построена группированием трехмерных изображений, построенных на этапе 806A. В контексте Фиг.8B последовательности трехмерных изображений могут предоставить 4D визуальное представление области субъекта всюду по физиологическому циклу. Движение, вызванное физиологическим циклом, например, дыхание, обычно бывает достаточно периодичным и воспроизводимым.
MR проекционная визуализация для контроля лучевой терапии
На Фиг.9 показан общий вид методики, такой как способ, которая может включать в себя создание двумерного (2D) проекционного изображения, используя MR визуализацию и определение изменения между созданным 2D проекционным изображением и информацией об опорной визуализации. На этапе 902 может быть принята информация об опорной визуализации. Например, методики 800A или 800B на Фиг.8A или Фиг.8B могут быть использованы для получения информации об опорной визуализации, например, до лечения. В другом примере, конкретное трехмерное опорное изображение также может быть создано, не требуя создания других трехмерных изображений или группирования полученных трехмерных изображений в информацию о 4D визуализации. Например, если синхронизованную с дыханием терапию нужно поставить в течение конкретной фазы или амплитуды цикла дыхания, то одно или более трехмерных изображений могут быть построены, соответствуя участку исследуемого цикла дыхания, или в течение планирования предварительного лечения, или внутри фракционно.
На этапе 904 2D проекционное изображение может быть создано, используя методики, показанные и описанные в настоящем документе в другом месте (например, используя последовательность 2D MR визуализации с большим срез-селектирующим градиентом или без срез-селектирующего градиента или группируя информацию, полученную в соответствии с множественными 1D проекционными линиями). На этапе 906 может быть определено изменение между созданным 2D проекционным изображением и информацией об опорной визуализации. На этапе 908 доставка лучевой терапии может контролироваться, по меньшей мере частично используя информацию, указывающую на определенное изменение.
Определенное изменение может обеспечить информацию, указывающую на одного или более из обновленного местоположения целевой области, анатомической особенности или ориентира, или движение целевой области, анатомической особенности или ориентира, как иллюстративных примеров. В примере, 2D MR проекционное изображение, созданное на этапе 904, может включать в себя или может быть связано с движением мишени от перспективного изображения плоскости лучевой терапии" в проекции со стороны пучка" (BEV). Имеются различные варианты, которыми движение мишени в плоскости BEV может быть извлечено из 2D MR проекционного изображения.
В одном подходе 2D/3D регистрация может быть выполнена между 2D MR проекционным изображением и информацией о трехмерной MR визуализации, например, подобно методикам, используемым для регистрации между рентгеновским проекционным изображением и опорным CTОМ или CBCT изображением. Такой подход может быть использован, например, для идентификации одной или более трансляций, которые обеспечивают согласование между 2D проекционным изображением и сдвинутой информацией о трехмерной MR визуализации, и идентифицированная трансляция может быть использована как "изменение" в контексте Фиг.9 на этапе 906 и 908 для контроля поставки лучевой дозы, например, снова устанавливая одно или более из выхода терапевтического пучка или пациента или модифицируя апертуру терапевтического пучка. Качество согласования может быть задано, например, используя один или более показателей, например, может включать в себя определение нормализованной кросс-корреляции или взаимной информации. Повороты и деформации могут быть включены в регистрационную методику благодаря простоте и вычислительной эффективности.
В другом подходе может быть выполнено сокращение размерности, например, преобразуя 2D/3D проблему регистрации в 2D/2D проблему регистрации. В одном подходе опорные проекции могут быть извлечены из информации о трехмерной опорной MR визуализации подобно реконструкции рентгенограмм в цифровой форме (DRR) в рентгеновской визуализирующей радиотерапии. Может быть использована сегментация, например, для идентификации мишени или окружающих структур, например, OAR, хотя еще одна из мишеней для лучевой терапии, или OAR, может быть замаскирована структурами, которые лежат на пути проекционного направления. Как только мишень или другая структура были сегментированы, может быть идентифицировано движение мишени или другой структуры. Такое движение также используется для прогнозирования будущего местоположения мишени.
Может существовать задача, состоящая в том, чтобы попытаться зарегистрировать или иначе сравнить полученные позднее MR проекционные изображения с информацией об опорной трехмерной или 4D MR визуализации. Полученные позднее MR проекционные изображения могут иметь качество, отличающееся от информации об опорной визуализации, в частности, когда информация об опорной визуализации была получена без использования проекционной визуализации. Методики регистрации обычно более эффективны в сравнении изображений, имеющих подобное качество изображения или подобные характеристики. Авторы заявки обнаружили, между прочим, что информация об опорной визуализации (например, полученная на этапе 902 на Фиг.9) может быть получена, используя MR проекционную визуализацию, например, используя набор поворотных проекций.
Как отмечено относительно Фиг.8A и Фиг.8B, такие MR проекции могут быть использованы для реконструкции трехмерного MR изображения, например, используя методику томографической реконструкции. Таким образом, опорное трехмерное MR изображение будет иметь подобное качество изображения, как и полученные позднее MR проекционные изображения. В примере полученное позднее MR проекционное изображение может быть сравнено непосредственно с получаемым опорным MR проекционным изображением, не требуя использования информации о трехмерной или 4D опорной визуализации.
Как отмечено выше, если проекционные направления поворачиваются вокруг визуализируемого субъекта, информация о 4D MR опорной визуализации может быть скомпилирована подобно 4D-CBCT, поскольку конкретные проекции будут обычно содержать различные виды анатомии визуализируемого субъекта. Такая анатомия может включать в себя ориентиры, например, показывающие местоположение диафрагмы, или область, которая предназначена для облучения. Общие анатомические ориентиры могут затем использоваться для биннинга проекций для формирования 4D MRI последовательности вместо использования независимого суррогата.
Продолжительность сбора данных для получения информации о трехмерной или 4D визуализации может контролироваться с использованием методик MR проекционной визуализации. Например, продолжительность сбора данных может быть значительно сокращена, например, получением более ограниченного числа томографических проекций и используя методики разреженной томографической реконструкции, например, сжатое считывание, или сжатое считывание предшествующего изображения (PICCS). Продолжительность сбора данных также может быть улучшена, например, использованием стратегий параллельной визуализации, включающих в себя одну или более из множественных передающих или приемных катушек с различными профилями чувствительности.
В описанных здесь примерах MR проекции не обязательно должны включать в себя профили проекций, которые охватывают пациента целиком по вертикальному размеру вдоль проекционного направления. Например, конкретное MR проекционное изображение может использовать конечную толщину срезов, охватывающую целиком исследуемую область по вертикальному размеру. Сокращение протяженности вертикального размера может способствовать уменьшению затемнения исследуемой области (например, затенения) наложением сверху или снизу анатомии по вертикальному размеру, но за счет сокращения или исключения возможности предоставления полной томографической реконструкции.
Пространственные конфигурации MR проекционной визуализации, например, относительно ориентации пучка лучевой терапии
На Фиг.10A показана общая пространственная конфигурация ориентации 1090 пучка лучевой терапии относительно одного или более проекционных направлений, которые могут включать в себя два проекционных направления, ориентированных ортогонально друг к другу. В самом простом подходе MR проекционное изображение может быть получено с использованием ориентации 1060A проекционных линий, которая совпадает с ориентацией 1090 терапевтического пучка в первом угловом положении θA. Как отмечено относительно других примеров, плоскость 1070A проекционной визуализации может включать в себя информацию, полученную с использованием параллельной проекции (например, соответствующей линиям 1064A и 1062A) или с использованием расходящейся ориентации проекционных линий, сходящихся в местоположении 1050. Проекционное MR изображение может получить информацию вдоль линиям проекции для охвата исследуемой области 1012, например, включающей в себя изоцентр 1010 лечения. Таким образом, плоскость 1070A проекционной визуализации может обеспечить визуальное представление, подобное проекции со стороны пучка (BEV) или портальное изображение.
Конфигурация, показанная на Фиг.10A, может быть статической, или ориентация пучка и ориентация проекционной линии могут поворачиваться вместе вокруг пациента (как в примере с установленным на гентри выводом лечебного пучка, обеспечивающим портальную визуализацию). Ориентация для MR проекционной визуализации, выставленной с BEV - это обычно полезное направление, поскольку апертура терапевтического пучка обычно имеет форму для обеспечения заданного профиля в плоскости, параллельной плоскости 1070A проекционной визуализации. Без визуализации из других направлений движение мишени или особенности визуализации не могут быть явно определены в направлении глубины (например, направление Y), но существуют подходы для оценки такого движения, если доступна информация в плоскости, указывающей на движение мишени. В другом случае могут быть получены дополнительные проекции, имеющие другие проекционные направления.
В примере одна или более MR проекций, перпендикулярных плоскости BEV могут быть получены, например, в различные времена. Такие ортогональные изображения могут способствовать получению информации, отсутствующей в направлении глубины (например, направление Y) вдоль первой ориентации 1060A проекционных линий. Например, как показано иллюстративно на Фиг.10A, вторая ориентация 1060B проекционных линий может быть использована в ортогональном угловом положении θB, задавая плоскость 1070B проекционной визуализации, ортогональную к первой плоскости 1070A проекционной визуализации. И опять параллельные или расходящиеся проекционные линии могут быть установлены, например, как параллельные линии 1064B и 1062B, показанные на Фиг.10A.
Чередование или иное структурирование между проекциями, параллельными и перпендикулярными к плоскости BEV, может обеспечить полную информацию по глубине, за счет уменьшенной частоты получения проекций, параллельных к BEV. Ортогональная конфигурация, показанная на Фиг.10A, может моделировать рентгеновскую стереоскопическую визуализацию с установкой на гентри. Как иллюстративный пример перпендикулярные проекции не обязательно должны быть получены поочередно для каждого получения проекции BEV. Например, ортогональная проекционная ориентация может быть использована для получения данных только иногда, для установления или обновления корреляции между движением мишени в BEV и движением в направлении глубины.
На Фиг.10B показана общая пространственная конфигурация проекционных направлений 1060A, 1060B и 106°C MR визуализации, которые соответствуют положениям θA, θB, θC проекционных углов, перекрывающих дугу или круг вокруг заданной области, например, вокруг изоцентра 1010 лечения лучевой терапией. Соответственные проекционные направления 1060A, 1060B, и 106°C могут предоставить конкретные ориентации 1070A, 1070B, и 107°C плоскости проекционной визуализации. Для доставки лечения поворотной лучевой терапией BEV естественно поворачивается вокруг пациента, например, когда источник лучевой терапии установлен на гентри. Полученные проекционные изображения могут иметь больше чем одну задачу. Например, как отмечено выше, конкретное проекционное изображение BEV может предоставить информацию, указывающую на положение мишени для лучевой терапии, или формы, из перспективного изображения источника пучка лучевой терапии. Кроме того, если получен ряд проекционных изображений, может быть реконструировано трехмерное томографическое MR изображение. MR проекционные ориентации, показанные на Фиг.10B, не ограничиваются примерами, где источник пучка лучевой терапии поворачивается. Например, для лучевой терапии, предполагающей одно или более статических полей терапии, поворотные MR проекции могут быть получены отдельно от проекций BEV, например, переменным образом или в соответствии с другой заданной последовательностью визуализации.
На Фиг.10C показана общая пространственная конфигурация проекционного направления 1060D MR визуализации, например, ориентированного под заданным углом, α, относительно направления пучка лучевой терапии. Пучок 1090 лучевой терапии может расходиться от местоположения 1050 источника, и плоскость 1092 может задавать BEV. В отличие от других примеров, проекционное направление 1060D MR визуализации может быть задано для фиксации перспективного изображения визуализации, несколько отличной от проекции BEV, например, для получения информации о визуализации, соответствующей опережаемому по времени смещению BEV от текущего BEV. Такая опережаемая по времени MR проекционная визуализация может включать в себя угол α, задаваемый для учета задержки по времени, связанной с одним или более из получения MR проекционной визуализации, коррекций протокола доставки лучевой терапии или обновления протокола доставки лучевой терапии в ответ на полученную MR проекционную визуализацию. Как и в других примерах могут быть использованы схемы параллельной или расходящейся MR проекционной визуализации, и также как и в других примерах, ориентация 1060D проекционных линий может быть повернута относительно ориентации пучка лучевой терапии, поскольку пучок лучевой терапии поворачивается вокруг пациента.
Угол опережения α может быть определен, используя информацию об одном или более из известной продолжительности задержки или угловой скорости позиционирующей пучок гентри, как иллюстративный пример. Методика прогнозирования может быть применена к информации, получаемой от "опережающей плоскости BEV" 1070D, например, для прогнозирования наиболее вероятного положения мишени, которое возникнет к тому времени, когда положение вывода пучка терапии пересечется с ориентацией опережающей плоскости BEV 1070D. Примеры методик прогнозирования могут включать в себя одно или более из ядерной оценки плотности, методик на основе вейвлет-преобразования или методик с соответствующей векторной вычислительной машиной (RVM). Размерность проблемы прогнозирования может быть понижена от трех измерений до двух измерений, поскольку проекционное движение может быть ограниченным перспективном изображением опережающей плоскости BEV 1070D, вместо необходимости прогнозирования движения мишени в трехмерном координатном пространстве.
На Фиг.10D показана общая пространственная конфигурация проекционных направлений 1060E и 1060F MR визуализации, которые могут быть заданы для предоставления MR проекционных изображений в проекционных плоскостях 1070E и 1070F подобно стереоскопической рентгеновской визуализации. В примере на Фиг.10D, проекционное изображение не обязательно должно быть получено в направлении BEV, но может быть получено с использованием фиксированных ориентаций, например, с моделированием установленных в помещении методик стереоскопической рентгеновской визуализации. Как иллюстративный пример, чередующиеся MR проекции в переднезаднем и боковом направлениях могут быть получены, так, чтобы способствовать определению местонахождения мишени для лучевой терапии или других анатомических признаков. В примере, может быть использована комбинация MR проекционных направлений, например, фиксированных ориентаций и поворотных ориентаций, соответствующих положению гентри. Как иллюстративный пример, могут быть получены три или более проекций, например, чередующимся образом, включая в себя проекцию, ориентированную для совпадения с BEV; переднезадняя проекция; и боковая проекция. Каждая из проекций может быть выбрана так, чтобы включать в себя траекторию, пересекающую заданную область визуализируемого субъекта, например, как изоцентр 1010 лечения. Такие проекции не нуждаются в получении при той же самой скорости визуализации.
Различные примечания и примеры
Пример 1 может включать в себя или использовать объект изобретения (например, устройство, способ, средство для выполнения действий или устройство со считываемой средой, включающее в себя команды, которые, при выполнении устройством, могут заставить устройство выполнять действия), например, может включать в себя способ для создания информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, способ, содержащий: создание двух или более двумерных (2D) изображений, содержащих проекционные изображения, представляющие различные проекционные углы, и причем 2D изображения созданы с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации; назначение конкретных 2D изображений бинам, по меньшей мере частично используя информацию, указывающую на временные положения в пределах физиологического цикла, соответствующего конкретным 2D изображениям; построение трехмерных (3D) изображений, используя отсортированные по бинам 2D изображения; и построение информации о 4D визуализации, содержащей группирование трехмерных изображений.
В Примере 2 объект изобретения из Примера 1 необязательно включает в себя: физиологический цикл, содержащий цикл дыхания; и получение двух или более 2D изображений, содержащих получение 2D изображений, представляющих различные проекционные углы при продолжительности, охватывающей множественные циклы дыхания.
В Примере 3 объект изобретения по любому одному или более из Примеров 1-2 необязательно включает в себя создание двух или более 2D проекционных изображений, включающих в себя группирование полученных одномерных (1D) проекционных линий в конкретное 2D изображение, причем 1D проекционные линии пространственно ориентированы параллельно друг другу.
В Примере 4 объект изобретения по любому одному или более из Примеров 1-3 необязательно включает в себя создание двух или более 2D проекционных изображений, включающих в себя группирование полученных одномерных (1D) проекционных линий в конкретное 2D изображение, причем 1D проекционные линии ориентированных так, чтобы пространственно расходиться друг от друга.
В Примере 5 объект изобретения по любому одному или более из Примеров 1-4 необязательно включает в себя создание двух или более 2D проекционных изображений, включающих в себя получение среза 2D MR визуализации, перпендикулярного к проекционному углу, не требуя срез-селектирующего градиента.
В Примере 6 объект изобретения по любому одному или более из Примеров 1-5 необязательно включает в себя создание двух или более 2D проекционных изображений, включающих в себя получение среза 2D MR визуализации, перпендикулярного к проекционному углу с использованием срез-селектирующего градиента, задающего срез, достаточно большой по глубине для полного охвата протяженности мишени для лучевой терапии в измерении, параллельном проекционному углу.
В Примере 7 объект изобретения по любому одному или более из Примеров 1-6 необязательно включает в себя проекционные углы, охватывающие дугу поворота заданной центральной оси.
В Примере 8 объект изобретения по любому одному или более из Примеров 1-7 необязательно включает в себя определение фазы участка физиологического цикла, соответствующего конкретным 2D изображениям; и назначение конкретных 2D изображений бинам, используя информацию, указывающую на определенную фазу.
В Примере 9 объект изобретения по любому одному или более из Примеров 1-8 необязательно включает в себя определение амплитуды участка физиологического цикла, соответствующего конкретным 2D изображениям; и назначение конкретных 2D изображений бинам, используя информацию, указывающую на определенную амплитуду.
В Примере 10 объект изобретения по любому одному или более из Примеров 1-9 необязательно включает в себя одно или более из фазы или амплитуды участка физиологического цикла, соответствующего конкретным 2D изображениям, определенным с использованием особенности, извлеченной из конкретных 2D изображений.
В Примере 11 объект изобретения по Примеру 10 необязательно включает в себя извлеченную особенность, соответствующую диафрагме визуализируемого субъекта.
В Примере 12 объект изобретения по любому одному или более из Примеров 1-11 необязательно включает в себя назначение конкретных 2D изображений бинам, используя понижение размерности получаемой информации о визуализации.
В Примере 13 объект изобретения по любому одному или более из Примеров 1-12 необязательно включает в себя назначение конкретных 2D изображений бинам, используя Фурье Преобразование конкретных 2D изображений.
В Примере 14 объект изобретения по любому одному или более из Примеров 1-13 необязательно включает в себя построение 3D изображения из полученных 2D проекционных изображений, используя методику реконструкции томографического изображения.
В Примере 15 объект изобретения по любому одному или более из Примеров 1-14 необязательно включает в себя построение 3D изображения из полученных 2D проекционных изображений, включающих в себя выполнение построения 3D изображения, используя преобразованную информацию о визуализации, представленную в Фурье пространстве.
В Примере 16 объект изобретения по любому одному или более из Примеров 1-15 необязательно включает в себя построение 3D изображения из полученных 2D проекционных изображений, включающих в себя выполнение конструкции 3D изображения, используя методику фильтрации обратной проекции.
В Примере 17 объект изобретения по любому одному или более из Примеров 1-16 необязательно включает в себя построение 3D изображения из полученных 2D проекционных изображений, включающих в себя выполнение конструкции 3D изображения, используя методику сжатого считывания.
В Примере 18 объект изобретения по любому одному или более из Примеров 1-17, необязательно включает в себя построение 3D изображения из полученных 2D проекционных изображений, включающего в себя выполнение конструкции 3D изображения, используя конструкцию Feldman-Davis-Kress.
В Примере 19 объект изобретения по любому одному или более из Примеров 1-18 необязательно включает в себя построение трехмерного изображения из полученных 2D проекционных изображений, включающих в себя выполнение конструкции трехмерного изображения, используя итерационный подход.
В Примере 20 объект изобретения по любому одному или более из Примеров 1-19 необязательно включает в себя предоставление информации о 4D визуализации для использования в создании или адаптации плана лечения лучевой терапией.
В Примере 21 объект изобретения по любому одному или более из Примеров 1-20 необязательно включает в себя использование информации о 4D визуализации для назначения или определения положения пациента до доставки фракции лечения лучевой терапией.
Пример 22 может включать в себя, или необязательно может быть объединен с объектом изобретения по одному или любой комбинации Примеров 1-21 для включения в себя объекта изобретения (например, устройство, способ, средство для выполнения действия или машиночитаемая среда, включающая в себя команды, которые, когда выполняются вычислительной машиной, могут заставить машину выполнять действия), например, может включать в себя способ для контроля доставки лучевой терапии к субъекту с использованием проекционной визуализации, содержащий: прием информации об опорной визуализации; создание двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации, причем 2D проекционное изображение соответствует заданному проекционному направлению, включающему в себя траекторию, пересекающую по меньшей мере участок визуализируемого субъекта; определение изменения между созданным 2D проекционным изображением и информацией об опорной визуализации; контроль доставки лучевой терапии по меньшей мере с частичным использованием определенного изменения между полученным 2D проекционным изображением и информацией об опорной визуализации.
В Примере 23 объект изобретения по Примеру 22 необязательно включает в себя создание 2D проекционного изображения, содержащего группирование полученных одномерных (1D) проекционных линий.
В Примере 24 объект изобретения по Примеру 23 необязательно включает в себя то, что заданное проекционное направление определено по меньшей мере частично для обеспечения 1D проекционных линий, заданных соответствующими траекториями, пересекающими изоцентр лечения лучевой терапией.
В Примере 25 объект изобретения по любому одному или более из Примеров 23-24 необязательно включает в себя то, что 1D проекционные линии ориентированы так, чтобы пространственно расходиться друг от друга.
В Примере 26 объект изобретения по любому одному или более из Примеров 23-25 необязательно включает в себя то, что направления, соответствующие конкретным 1D, проекционным линиям заданы так, чтобы сходиться в местоположении, соответствующем доступному положению вывода пучка лучевой терапии.
В Примере 27 объект изобретения по любому одному или более из Примеров 22-26 необязательно включает в себя то, что создание 2D проекционного изображения содержит получение среза 2D MR визуализации, перпендикулярного к проекционному углу, не требуя срез-селектирующего градиента.
В Примере 28 объект изобретения по любому одному или более из Примеров 22-27 необязательно включает в себя то, что создание 2D проекционных изображений содержит получение среза 2D MR визуализации, перпендикулярного к проекционному углу, с использованием срез-селектирующего градиента, задающего срез, достаточно большой по глубине для полного охвата протяженности мишени для лучевой терапии в измерении, параллельном проекционному углу.
В Примере 29 объект изобретения по любому одному или более из Примеров 22-28 необязательно включает в себя то, что заданное проекционное направление соответствует настоящему или будущему направлению пучка лучевой терапии.
В Примере 30 объект изобретения по любому одному или более из Примеров 22-29 необязательно включает в себя то, что заданное проекционное направление ортогонально к настоящему или будущему направлению пучка лучевой терапии.
В Примере 31 объект изобретения по любому одному или более из Примеров 22-30 необязательно включает в себя то, что заданное проекционное направление устанавливается, не требуя направления пучка лучевой терапии.
В Примере 32 объект изобретения по любому одному или более из Примеров 22-31 необязательно включает в себя то, что опорное изображение содержит второе 2D проекционное изображение, созданное с использованием полученной ранее информации о визуализации.
В Примере 33, объект изобретения по Примеру 32 необязательно включает в себя то, что второе 2D проекционное изображение создано с использованием информации о четырехмерной (4D) визуализации, собранной из полученной ранее информации о визуализации.
В Примере 34 объект изобретения по любому одному или более из Примеров 22-33 необязательно включает в себя то, что опорное изображение содержит информацию о трехмерной (3D) визуализации, соответствующую полученной ранее информации о визуализации.
В Примере 35 объект изобретения по любому одному или более из Примеров 22-34 необязательно включает в себя то, что опорное изображение содержит информацию о 4D визуализации, собранную из полученной ранее информации о визуализации.
В Примере 36 объект изобретения по любому одному или более из Примеров 22-35 необязательно включает в себя то, что опорное изображение содержит 3D изображение, извлеченное из участка информации о 4D визуализации, собранной из полученной ранее информации о визуализации.
В Примере 37, объект изобретения по Примеру 36 необязательно включает в себя то, что выбранный участок информации о 4D визуализации содержит заданный участок физиологического цикла.
В Примере 38 объект изобретения по любому одному или более из Примеров 22-37 необязательно включает в себя то, что определение изменения включает в себя использование последовательностей из двух или более 2D проекционных изображений, созданных с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации.
В Примере 39 объект изобретения по любому одному или более из Примеров 22-38 необязательно включает в себя то, что определение изменения включает в себя регистрацию по меньшей мере участка 2D проекционных изображений с опорным изображением.
В Примере 40 объект изобретения по любому одному или более из Примеров 22-39 необязательно включает в себя то, что определение изменения содержит извлечение особенности из 2D проекционного изображения.
В Примере 41 объект изобретения по любому одному или более из Примеров 22-40 необязательно включает в себя то, что определение изменения включает в себя сегментацию участка 2D проекционного изображения.
В Примере 42 объект изобретения по Примеру 41 необязательно включает в себя то, что сегментированный участок 2D проекционного изображения содержит перспективное изображение мишени для лучевой терапии.
В Примере 43 объект изобретения по любому одному или более из Примеров 22-42 необязательно включает в себя то, что определение изменения содержит разбиение на треугольники между определенными перспективными изображениями мишени для лучевой терапии, сегментированной из двух или более 2D проекционных изображений.
В Примере 44 объект изобретения по любому одному любому одному или более из Примеров 22-43 необязательно включает в себя прогнозирование местоположения мишени для лучевой терапии, используя определенное изменения и прогнозирующую модель.
В Примере 45 объект изобретения по Примеру 44 необязательно включает в себя то, что прогнозирующая модель включает в себя использование информации, указывающей на движение мишени, установленное по меньшей мере частично с использованием извлеченных перспективных изображений мишени для лучевой терапии из последовательностей полученных 2D проекционных изображений и определенного изменения между по меньшей мере одним 2D проекционным изображением и опорным изображением.
Пример 46 может включать в себя или может необязательно быть объединен с объектом изобретения по одной или любой комбинации Примеров 1-45 для включения в себя объекта изобретения (например, устройство, способ, средство для выполнения действия или машиночитаемая среда, включающая в себя команды, которые, когда будучи выполняемыми вычислительной машиной, могут заставить машину выполнять действия), который может включать в себя систему визуализации, содержащую: по меньшей мере одну схему процессора и читаемый процессором носитель данных, включающий в себя команды, которые, будучи исполняемыми схемой процессора, заставляют схему процессора создавать информацию о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, включая: создание двух или более двумерных (2D) изображений, причем 2D изображения содержат проекционные изображения, представляющие различные проекционные углы, и причем 2D изображения созданы с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации; назначение конкретных 2D изображений бинам по меньшей мере с частичным использованием информации, указывающей на временные положения в пределах физиологического цикла, соответствующего конкретным 2D изображениям; построение трехмерных (3D) изображений с использованием отсортированных по бинам 2D изображений; и построение информации о 4D визуализации, содержащей группирование трехмерных изображений.
Пример 47 может включать в себя или может необязательно быть объединен с объектом изобретения по одной или любой комбинации Примеров 1-46 для включения в себя предмета (например, устройство, способ, средство для выполнения действий или машиночитаемая среда, включающая в себя команды, которые, будучи выполняемыми вычислительной машиной, могут заставить машину выполнять действия), который может включать в себя систему лечения лучевой терапией, содержащую: генератор терапии; и вывод терапии; систему контроллера терапии, связанную с генератором лучевой терапии и вывод лучевой терапии, причем система контроллера лучевой терапии содержит ввод визуализации, выполненный с возможностью приема информации об опорной визуализации, система контроллера терапии выполнена с возможностью: создания двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) визуализации, 2D проекционное изображение соответствует заданному проекционному направлению, включающему в себя траекторию, пересекающую по меньшей мере участок визуализируемого субъекта; определение изменения между созданным 2D проекционным изображением и информацией об опорной визуализации; и контроль доставки лучевой терапии на выводе лучевой терапии по меньшей мере с частичным использованием определенного изменения между полученным 2D проекционным изображением и информацией об опорной визуализации.
Каждый из не ограничивающих примеров, описанных в этом документе, может быть использован сам по себе или может быть объединен в различных перестановках или комбинациях с одним или более других примеров.
Приведенное выше подробное описание включает в себя ссылки на сопровождающие чертежи, которые являются частью подробного описания. Чертежи показывают, посредством иллюстрации, конкретные варианты осуществления, в которых может быть осуществлено изобретение. Эти варианты осуществления также упомянуты здесь как "примеры". Такие примеры могут включать в себя элементы в дополнение к тем, которые показаны или описаны. Однако изобретатели также рассматривают примеры, в которых предоставляются только те элементы, которые показаны или описаны. Кроме того, изобреталели также рассматривают примеры, используя любую комбинацию или перестановку тех элементов, которые показаны или описаны (или один или более их аспектов) или относительно конкретного примера (или один или более их объектов), или относительно других примеров (или один или более их объектов), показанных или описанных здесь.
В случае использований, несовместимых между этим документом и любыми документами, включенными в настоящий документ по ссылке, использование в этом документе контролируется.
В этом документе используемые выражения в единственном числе, как обычно в патентных документах, включают в себя одно или более, чем одно, независимо от любых других случаев или использований "по меньшей мере одно" или "одно или более ". В этом документе термин "или" используется для обозначения не исключительности или так, что "A или B" включают в себя "A, но не B", "B, но не A", и "A и B," если не указано иное. В этом документе выражения "включающий в себя" и "в котором" используются просто как английские эквиваленты соответственных терминов "содержащий" и "причем". Кроме того, в нижеследующей формуле, выражения "включающий в себя" и "содержащий" открыты, то есть, система, устройство, изделие, состав, формулировка или процесс, которые включают в себя элементы в дополнение к таковым, перечисленным после такого выражения в формуле, считаются находящимися в пределах объема притязаний данного пункта формулы. Кроме того, в нижеследующей формуле выражения "первый", "второй" и "третий" и т.д. используются просто как метки и не предназначены для наложения числовых требований на эти объекты.
Примеры способа, описанного здесь, могут быть осуществляемыми машиной или компьютером по меньшей мере частично. Некоторые примеры могут включать в себя читаемый компьютером носитель данных или машиночитаемый носитель данных, закодированный командами, действующими для конфигурации электронного устройства для выполнения способов, как описано в вышеприведенных примерах. Выполнение таких способов может включать в себя код, например, микрокод, код ассемблера, код высокоуровневого языка, или подобное. Такой код может включать в себя читаемые компьютером команды для выполнения различных способов. Код может формировать участки продуктов компьютерной программы. Дополнительно, в примере, код может быть реально сохранен на одном или более энергозависимых, энергонезависимых или энергонезависимых читаемых компьютером реальных носителях данных, например, во время выполнения или в другие моменты времени. Примеры этих читаемых компьютером реальных носителей данных могут включать в себя, но без ограничения, жесткие диски, сменные магнитные диски, сменные оптические диски (например, компакт-диски и цифровые видео диски), магнитные кассеты, карточки или стикеры с памятью, устройства оперативной памяти (RAM), постоянные запоминающие устройства (ROM), и т.п.
Вышеприведенное описание предназначено для иллюстрации, и не является ограничительным. Например, вышеописанные примеры (или один или более их аспектов) могут быть использованы в комбинации друг с другом. Другие варианты осуществления могут быть использованы, например, специалистом в данной области техники после рассмотрения вышеприведенного описания. Реферат предоставляется для возможности читателя быстро понять характер технического раскрытия. Он представлен с пониманием того, что он не будет использован для интерпретации или ограничения объема притязаний или смысла формулы. Кроме того, в вышеприведенном подробном описании, различные признаки могут быть сгруппированы для упрощения раскрытия. Это не следует интерпретировать как намерение сделать незаявленный раскрытый признак существенным для какого-либо пункта формулы. В действительности, объект изобретения может находиться не во всех признаках конкретного раскрытого варианта осуществления. Таким образом, нижеследующие пункты формулы оказываются включенными в подробное описание как примеры или варианты осуществления с помощью каждого пункта формулы, устанавливающего самостоятельно отдельный вариант осуществления, и предполагается, что такие варианты осуществления могут быть объединены друг с другом в различных комбинациях или перестановках. Объем притязаний изобретения должен быть определен в связи с приложенными пунктами формулы наряду с полным объемом притязаний эквивалентов, к которым относятся такие пункты формулы.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам контроля доставки лучевой терапии к субъекту с использованием проекционной визуализации. Осуществляемый компьютером способ контроля адаптивной системы доставки лучевой терапии содержит прием информации об опорной визуализации, создание двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) проекционной визуализации, причем 2D проекционное изображение соответствует заданному проекционному направлению, включающему в себя траекторию, пересекающую по меньшей мере участок визуализируемого субъекта, определение изменения между созданным 2D проекционным изображением и информацией об опорной визуализации для прогнозирования местоположения мишени для лучевой терапии на основании прогнозирующей модели, и создание обновленного протокола для терапии для доставки лучевой терапии по меньшей мере с частичным использованием определенного изменения между полученным 2D проекционным изображением и информацией об опорной визуализации. Осуществляемый компьютером способ контроля доставки лучевой терапии к субъекту с использованием проекционной визуализации содержит дополнительно создание обновленного протокола терапии для доставки лучевой терапии по меньшей мере с частичным использованием определенного изменения между полученным 2D проекционным изображением и информацией об опорной визуализации, причем опорное изображение содержит изображение, извлеченное из выбранного участка информации о 4D визуализации, собранной из полученной ранее информации о визуализации, и причем выбранный участок информации о 4D визуализации содержит заданный участок физиологического цикла. Система лечения лучевой терапией содержит генератор для терапии, и вывод терапии, систему контроллера терапии, связанную с генератором лучевой терапии и выводом лучевой терапии, причем система контроллера лучевой терапии содержит ввод визуализации, который выполнен с возможностью приема информации об опорной визуализации, причем система контроллера терапии выполнена с возможностью создания двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной с помощью ядерной магнитно-резонансной (MR) проекционной визуализации, определения изменения между созданным 2D проекционным изображением и информацией об опорной визуализации для прогнозирования местоположения мишени для лучевой терапии на основании прогнозирующей модели, и контроля доставки лучевой терапии на выводе лучевой терапии по меньшей мере с частичным использованием определенного изменения между полученным 2D проекционным изображением и информацией об опорной визуализации. Использование изобретений позволяет уменьшить время запаздывания при получении визуализации. 3 н. и 15 з.п. ф-лы, 10 ил.
Комментарии