Устройство оптического определения положения и(или) ориентации объектов и соответствующие способы определения - RU2428709C2
Код документа: RU2428709C2
Чертежи
Описание
Настоящее изобретение относится к устройствам оптического определения положения и ориентации объектов в пространстве. Оно применяется, в частности, в области авиации, в которой в данном случае определяемым объектом является авиашлем.
Определение местоположения точки в пространстве и определение пространственного положения любого объекта осуществляется независимо от проблем, которые затрагивают многочисленные области технического применения.
Применяемые различные решения, как правило, должны устранить всю неопределенность положения или пространственного положения, более или менее соответствовать суровому динамическому режиму систем и обеспечить повышенную точность, в частности, в области авиационной техники.
Системы определения положения и пространственного положения объектов в пространстве, обеспечивающие точность в несколько миллиметров по положению и в один градус по пространственному положению, находят многочисленное применение в различных областях.
Эти системы используются в авиации для определения положения головы, в частности шлемов, используемых в боевых самолетах, военных, гражданских вертолетах и вертолетах специального назначения. В случае, в частности, специального назначения, речь может идти, например, о спасательных операциях на море. Они также применяются для определения положения имитационных шлемов; при этом такое определение может осуществляться вместе с устройством окулометрии, которое также называется следящим за глазом устройством, для определения положения взгляда. Также существует много вариантов применения этих систем в области виртуальной реальности и игр.
В более общем плане в области определения типового положения существует множество применений, в частности в области медицины при проведении операций на удалении и обеспечении контроля над инструментами; в области контроля положения для станков с полуавтоматическим регулированием и дистанционным управлением; и, наконец, в кинематографе для воспроизводства движений в виде компьютерной графики.
В этих различных вариантах применения используются технические решения, более или менее отвечающие жестким требованиям.
В случае, если при применении выдвигаются незначительные ограничения, в частности по точности, существуют различные системы определения положения и (или) ориентации объектов.
Например, устройства распознавания участков поверхности или форм при помощи камер используют рисунки, отпечатанные на объекте. Множество камер ведут наблюдение за картинкой и определяют пространственную конфигурацию наблюдаемого рисунка.
Существуют также устройства распознавания сферических поверхностей при помощи камер, используемых, например, в кинематографе для воспроизводства движений человека. В устройстве применяется множество камер, которые следят за отражающими сферическими поверхностями и определяют их траекторию.
И, наконец, существуют ультразвуковые устройства определения местоположения, которые используют метод триангуляции между ультразвуковыми передатчиками и приемниками.
Касательно более совершенных форм применения, в частности, в области авиации, в устройствах определения положения шлемов в летательных аппаратах используются две основных технологии, которые заключаются в определении электромагнитного положения и определении электрооптического положения.
При определении электромагнитного положения необходимо наличие устройств, содержащих средства излучения электромагнитного поля и расположенные на шлеме приемные датчики, позволяющие определять его положение относительно передатчика.
При определении электрооптического положения необходимо наличие, как правило, размещаемых на шлеме структурных групп светоизлучающих диодов, называемых также LED, и множества датчиков, типа камер, устанавливаемых в кабине, которые позволяют определять пространственную конфигурацию структурной группы LED.
Для улучшения характеристик часто необходимо осуществлять комбинирование с другими устройствами, содержащими датчики гироскопического, акселерометрического или магнитометрического типа. Такое сочетание датчиков позволяет улучшить динамические характеристики или устранить неопределенность ориентации. Эти датчики не изменяют статические характеристики местоположения вышеупомянутых устройств определения.
Однако эти решения содержат определенные неудобства и ограничения, в частности в авиационной области.
Что касается электрооптических устройств, то в этом случае необходимо знать картографию кабины или в целом топологическую схему зоны, в которой находится объект. В авиации такая топологическая схема может подвергаться деформации или быть трудной для картографирования.
Кроме того, эти же устройств нуждаются в наличии множества камер и датчиков. При расчете положения необходимо задействовать несколько источников, а анализ трудно осуществить в реальном масштабе времени.
Более того, рассеяние света светоизлучающих диодов в зоне определения не позволяет полностью исключить искажений, вызванных освещением кабины извне, которые связаны с солнечным светом или мешающими отражениями на фонаре.
Что касается устройств определения электромагнитного положения, то представляется сложным реализовать простые решения.
В частности, в авиационной области мешающие излучения и электромагнитные помехи могут ухудшить характеристики существующих систем.
Устройство согласно изобретению позволяет, в частности, устранить вышеупомянутые недостатки. Действительно, оно относится к устройствам электрооптического типа. Оно позволяет устранить недостатки, присущие электромагнитным устройствам.
С другой стороны, оно использует, предпочтительно, средства проецирования изображений типа голографического видеопроектора.
В частности, к преимуществам монохроматических голографических видеопроекторов относятся осуществление передачи в очень узкой полосе частот, четкость изображения в широком поле и возможность концентрации сильной энергии в очень небольшой зоне. Представляется возможным очень легко различать сигналы, поступающие из голографического видеопроектора, от паразитного света.
В частности, устройство согласно изобретению содержит электрооптические датчики, располагаемые на объекте и распределенные по группам, называемым кластерами, средства анализа и вычисления, позволяющие определять положение и (или) пространственное положение объекта, электронные средства формирования изображения и оптические средства проецирования, содержащие дисплей и проекционную оптику.
Оптические средства проецирования передают в проекционном конусе изображение, четкое во всех точках зоны свободного пространства для перемещения, в которой может перемещаться объект. Анализ частей изображений, принимаемых датчиками, по меньшей мере, одного кластера, позволяет определять положение и (или) пространственное положение объекта в системе отсчета, устанавливаемой проекционными средствами; при этом система отсчета образована плоскостью, перпендикулярной оси проецирования, так называемой плоскости изображения, и осью проецирования.
Предпочтительно, средства проецирования представлены голографическим видеопроектором. Он содержит источник когерентного света, дисплей, позволяющий создавать фазовое изображение, проекционную оптику, устанавливаемую таким образом, чтобы она обеспечивала формирование посредством дисплея из волны, излучаемой источником света, первую опорную волну и вторую модулированную волну, и содержала средства, позволяющие интерферировать эти две волны.
Кроме того, этот голографический видеопроектор может проецировать изображение в телесном угле в диапазоне минимум 10° и максимум 120° и обеспечивать скорость проецирования, по меньшей мере, 24 изображения в секунду.
Источник света данного голографического видеопроектора может быть монохроматическим и производить излучение в инфракрасной или близкой к инфракрасной полосе частот, при этом чувствительность датчиков приведена в соответствие с испускаемым излучением.
Предпочтительно, проецируемые изображения могут быть поляризованными. Кроме того, любой тип изображения может формироваться голографическим видеопроектором, включая визирные марки, занимающие все или часть изображения и содержащие светлый рисунок постоянной силы света.
Например, эти визирные марки состоят из светлых рисунков, которые могут иметь форму горизонтальных и (или) вертикальных черточек, или кругов, или концентрических колец; при этом каждое кольцо может состоять из чередующихся темных и светлых угловых частей; при этом количество кольцевых участков в одном кольце и следующем за ним кольце различны.
Возможен любой тип сочетания визирных марок в изображении, формируемом голографическим видеопроектором.
В устройстве согласно изобретению используются матричные или линейные фотодатчики. Они могут располагаться по группам, называемым также кластерами, которые имеют геометрическую форму, позволяющую улучшить характеристики устройства и сократить время расчетов.
Например, группы, состоящие из трех датчиков, в устройстве согласно изобретению могут располагаться в форме звезды или параллелограмма.
Электрооптические датчики и средства анализа способны, предпочтительно, интерпретировать и (или) распознавать поляризацию принимаемых сигналов.
Предпочтительно, первый способ оптического определения положения и ориентации объекта в пространстве посредством устройства определения согласно изобретению включает в себя:
- первый этап формирования голографическим видеопроектором непрерывного ряда изображений, отличающихся друг от друга, при этом каждое изображение выдает различный сигнал, по меньшей мере, на один кластер;
- второй этап анализа принимаемых датчиками кластера сигналов, позволяющий определить без априорной индикации положение и (или) пространственное положение датчиков в пространстве.
Предпочтительно, второй способ оптического определения положения и ориентации объекта в пространстве посредством устройства определения согласно изобретению включает в себя:
- первый этап формирования изображения, содержащего светлые рисунки, при этом данные рисунки формируются таким образом, чтобы они освещали кластеры;
- второй этап анализа принимаемых датчиками сигналов, позволяющий определить положение датчиков в пространстве;
- и, наконец, третий этап автоматического регулирования, позволяющий менять положение рисунков изображения, формируемого на кластере.
Предпочтительно, последний способ, представляющий собой сочетание двух предыдущих вышеупомянутых способов, содержит этап инициализации, осуществляемый согласно первому способу, и этап функционирования, соответствующий второму способу.
Другие отличительные признаки и преимущества предлагаемого изобретения станут видны из приводимого ниже описания со ссылкой на прилагаемые чертежи, на которых:
- фиг.1 изображает общий вид устройства согласно изобретению, выполненный в трехмерном измерении;
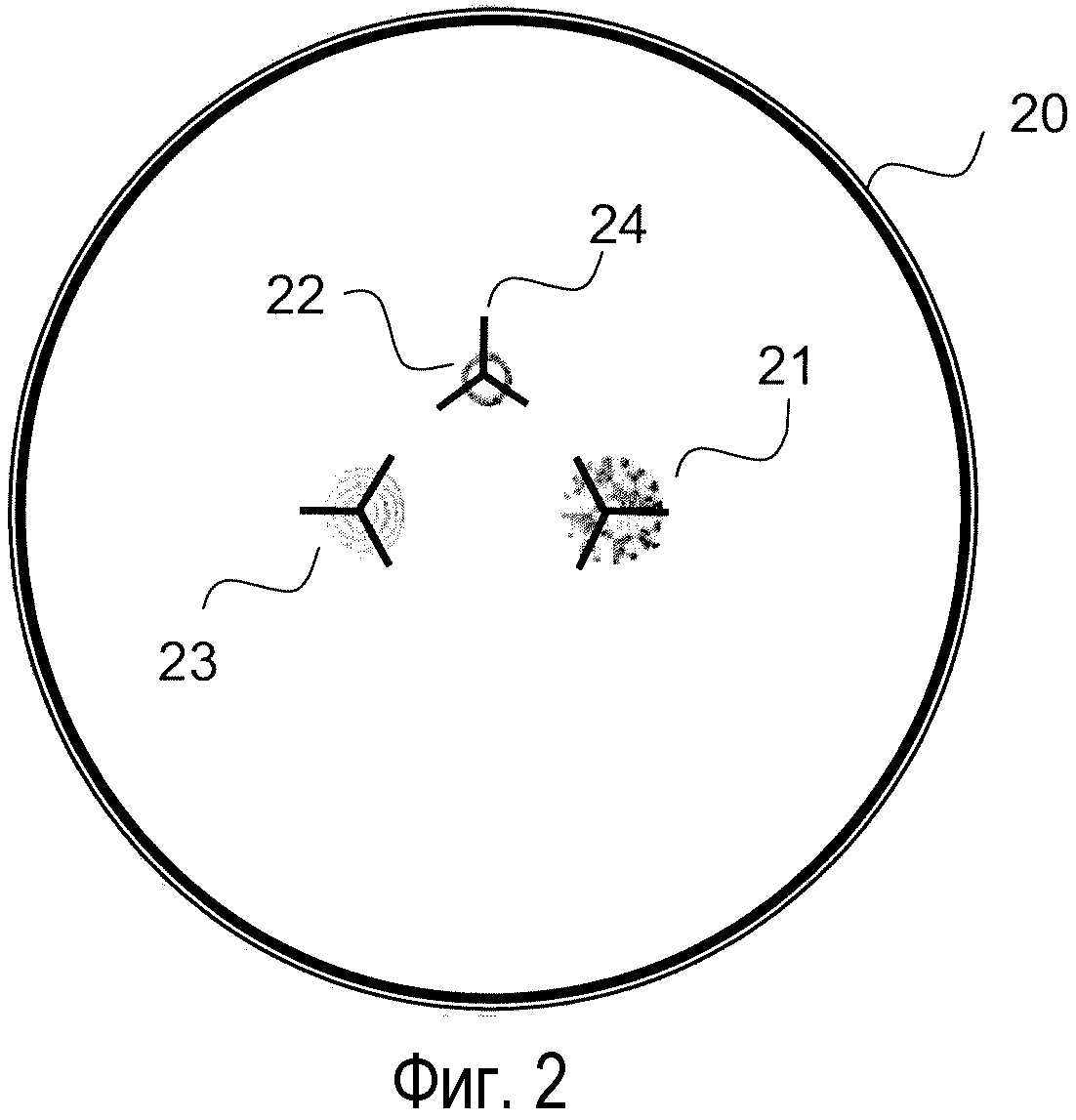
- фиг.2 изображает две визирных марки положения и одну визирную марку крена;
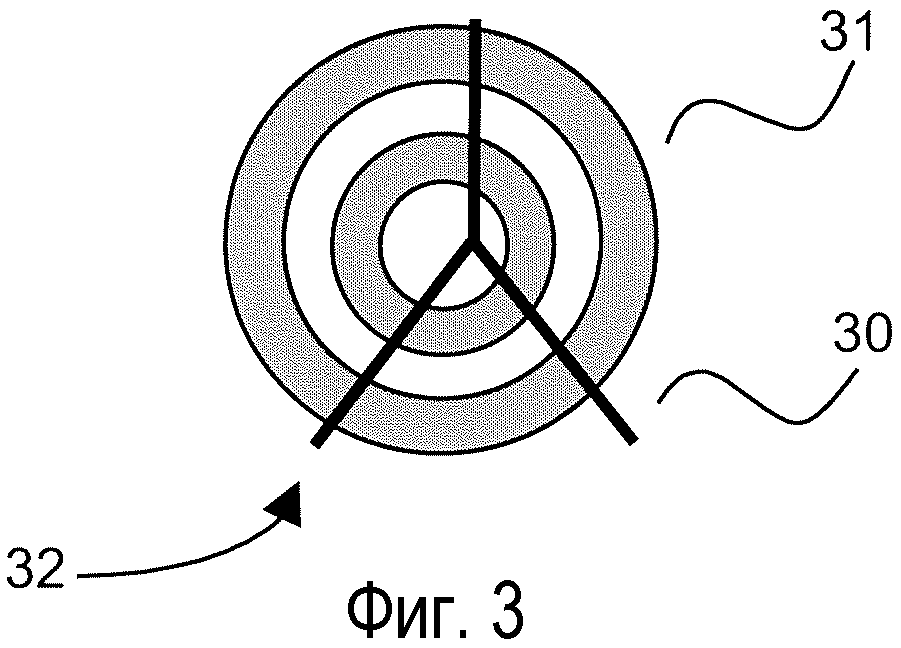
- фиг.3 изображает проекцию визирной марки положения на кластере;
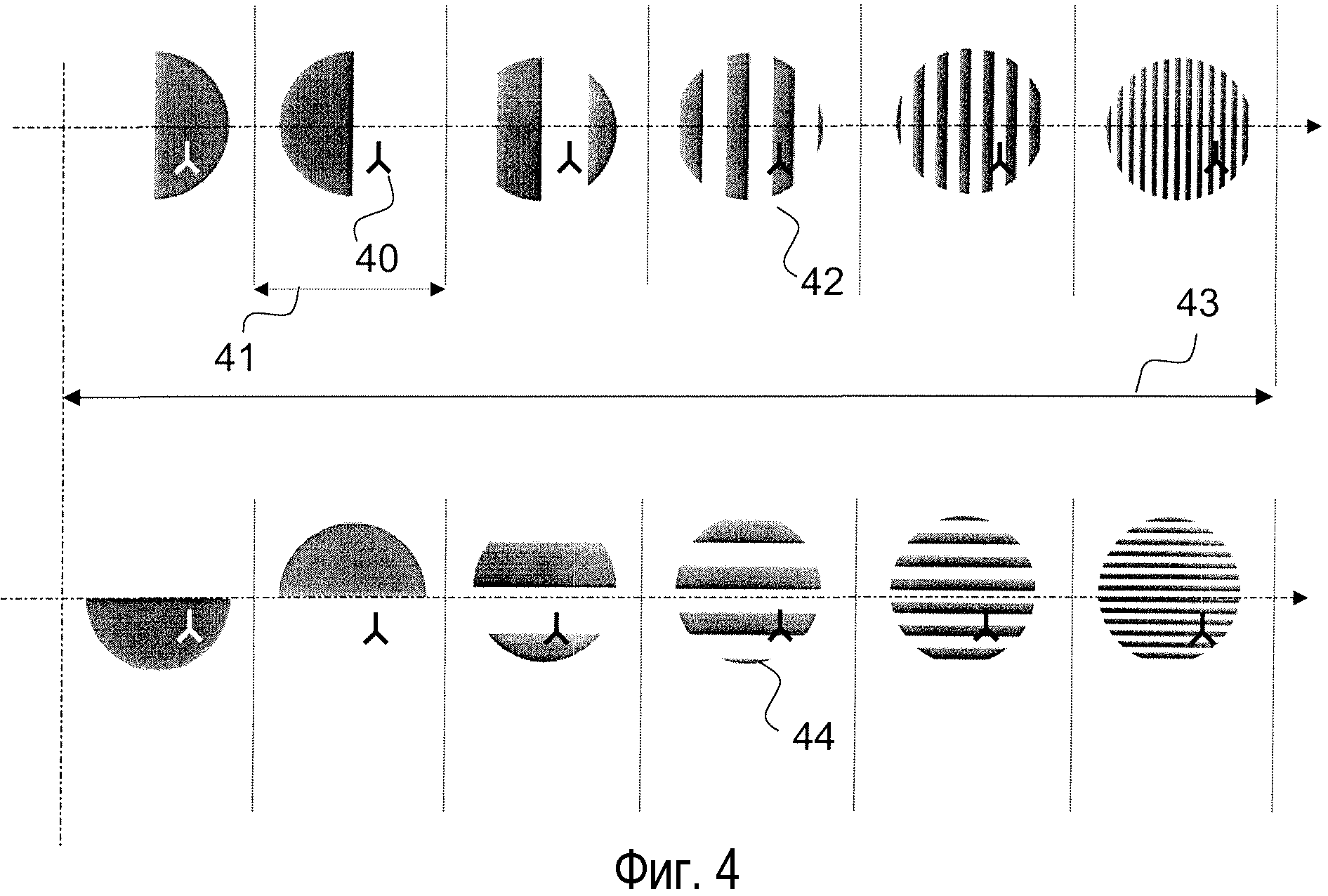
- фиг.4 изображает пример чередования визирных марок, проецируемых на кластер в виде звезды;
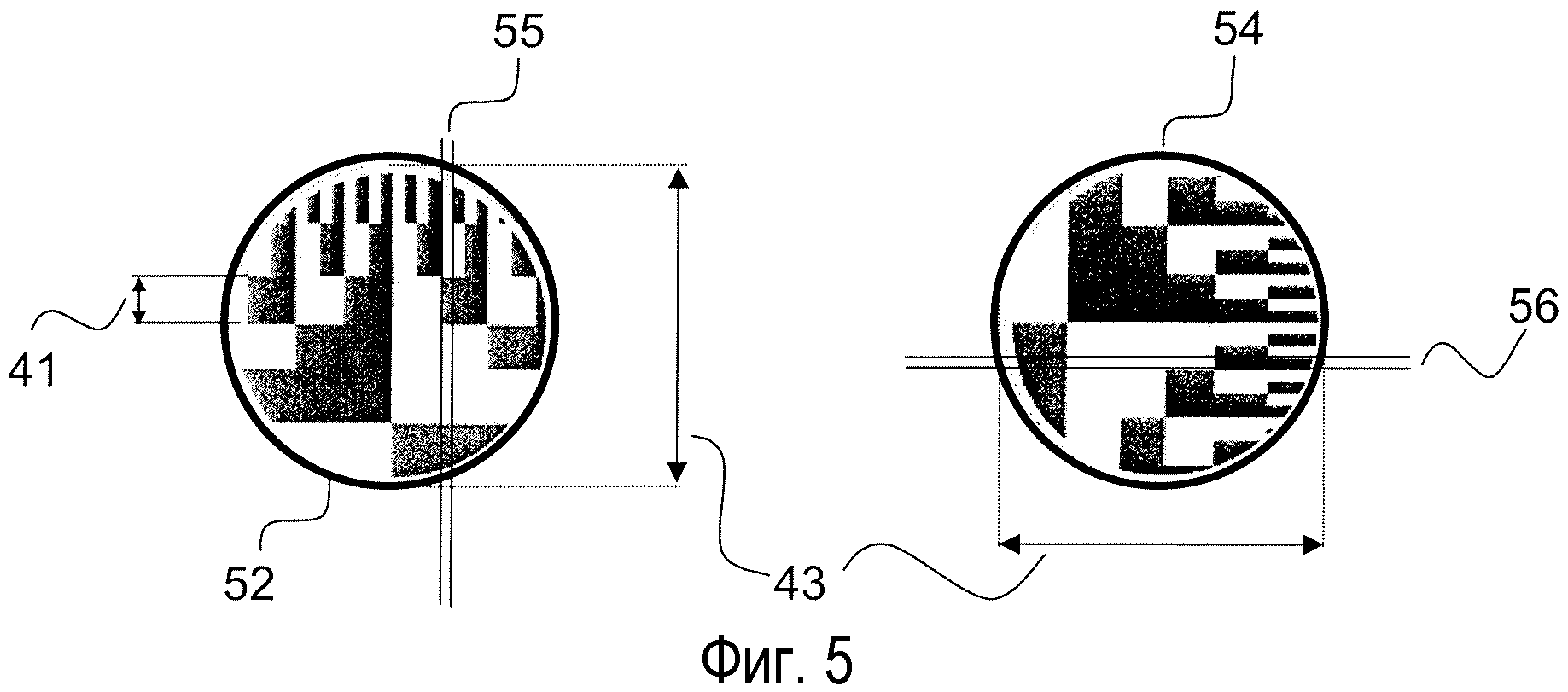
- фиг.5 изображает сочетание поочередно проецируемых визирных марок, представленных на фиг.4.
Описываемое в последующем устройство применяется в авиационной области, где объект является авиашлемом. Безусловно, представляется возможным приспособить устройство (без внесения существенных усовершенствований) для определения других объектов.
Как это показано на фиг.1, устройство согласно изобретению содержит проектор изображений 1. Данный проектор изображений передает изображение 3, в плоскости во всей зоне 4, содержащее совокупность визирных марок 7. Визирные марки проецируются на совокупность электрооптических датчиков 6, расположенных на объекте 5. Визирная марка представляет собой совокупность светлых геометрических рисунков на черном фоне. Эти визирные марки могут быть кругами, кольцами, черточками или иметь особую геометрическую форму. Совокупность датчиков называется кластером. Эти датчики могут быть сгруппированы таким образом, чтобы кластер имел геометрические характеристики, обеспечивающие определение. Устройство согласно изобретению для определения положения и ориентации в пространстве кластеров содержит средства анализа данных, поступающих от датчиков. После определения положения и ориентации, по меньшей мере, одного кластера становятся известными положение и ориентация объекта.
Для того чтобы устройство могло функционировать правильно, необходимо, чтобы рисунки визирных марок были четкими во всех точках датчиков. Существуют различные оптические средства, позволяющие обеспечить такую четкость.
С этой целью в соответствии с одним вариантом осуществления изобретения в качестве средства проецирования используется голографический видеопроектор 1. Такие голографические видеопроекторы изготавливаются и продаются, например, компанией Light Blue Optics и известны под торговой маркой PVPro. К преимущественным свойствам данного голографического видеопроектора относится возможность передавать четкое изображение во всех точках зоны свободного пространства для перемещения 8.
Этот голографический видеопроектор содержит источник когерентного света, который, как правило, представляет собой лазерный диод, дисплей, позволяющий воспроизводить фазовое изображение, оптические средства, расположенные таким образом, чтобы могли формировать из волны, поступающей от источника света, первую опорную волну и вторую волну, модулированную дисплеем, и средства, позволяющие интерферировать эти две волны. Получаемое в конечном итоге изображение является голограммой Фраунгофера фазового изображения, воспроизводимого на дисплее. Посредством этого средства представляется возможным создавать различного типа изображения. Дисплей может быть жидкокристаллическим дисплеем, например типа жидких кристаллов на кремнии.
Изображение 3, образуемое голографическим видеопроектором, состоит из визирных марок 7, которые могут быть сосредоточенными на датчике визирными марками, называемыми также визирными марками положений или визирными марками крена, или визирными марками, которые могут покрывать совокупность поля, занимая, таким образом, все изображение или его большую часть. Визирные марки передаются в определенной последовательности по времени, при этом рисунки, составляющие визирную марку, могут изменяться или оставаться одинаковыми между двумя последовательными передачами.
Устройство, изображенное на фиг.1, представляет собой пример кластера 6, состоящий из трех датчиков, каждый из которых располагается в форме звезды. Каждый из кластеров заключен в плоскости на поверхности объекта 5. Датчики могут быть, например, матричными линейными датчиками.
Таким образом, визирные марки, созданные при помощи голографического видеопроектора, проецируются частями на плоскости некоторого достаточного количества кластеров объекта. Каждый элемент каждого электрооптического датчика, входящего в состав кластера, определяет наличие световых сигналов, исходящих от визирных марок. Эти сигналы подаются на вычислительное устройство для осуществления анализа.
Размеры визирных марок, а также форма и количество датчиков представляют собой оптимальные параметры, которые зависят от свободного пространства для перемещения, формы и объема объекта, а также от заданной точности. Количество кластеров, а также расположение и количество визирных марок должны быть достаточными для того, чтобы проецирование визирных марок достигло достаточного количества кластеров, которые позволили бы определить положение объекта при помощи средств анализа 2. Средствами анализа, как правило, являются электронные вычислительные устройства.
Существуют различные способы функционирования устройства. Первым способом функционирования является способ автоматического регулирования. Определение положения и ориентации в пространстве кластеров или объекта зависит от априорно известного в непосредственно близком прошлом и рассчитанного на момент проецирования положения и ориентации сформированных визирных марок, которые переданы в направлении данных кластеров.
В соответствии с данным способом вычислительное устройство 2 анализирует положение и ориентацию одного или нескольких кластеров. Данное вычислительное устройство с учетом этих данных производит автоматическое регулирование положения визирных марок, проецируемых голографическим видеопроектором. В связи с этим рассчитанные положение и ориентация в пространстве кластеров используются для определения следующего положения визирных марок, проецируемых в плоскости изображения.
На фиг.2 изображен пример визирных марок, применяемых в первом способе функционирования. Две визирных марки положения 22 и 23 и одна визирная марка 21 крена изображены внутри зоны 20, которая ограничена частью видимого из проектора объекта; при этом данная зона представляет собой круг. Эти три визирных марки являются локальными, т.е. они центрированы вокруг одного кластера.
Визирная марка положения 22 является примером визирной марки, обладающей одним светлым кольцом. Некоторые элементы датчика кластера 24 принимают свет и выдают на вычислительное устройство данные, которые позволяют легко рассчитать, путем моделирования, положение кластеров в светлом кольце.
Визирная марка положения 23 является другим примером визирной марки, обладающей несколькими светлыми кольцами. Аналогичным образом вычислительное устройство способно на основании данных, поступающих от каждого элемента каждого датчика, воспроизвести положение кластеров в светлых кольцах.
Визирная марка 21 является примером визирной марки крена. Она содержит различные концентрические кольца, при этом каждое кольцо имеет светлые и темные угловые участки постоянной ширины, располагаемые таким образом, что по ширине участка группа полос, образованная совокупностью участков на одном радиусе, являлась единой. Угловое положение, т.е. ориентация, выводится путем анализа данных, поступивших от каждого датчика кластера.
На фиг.3 изображен пример визирной марки положения и кластера на той же плоскости. Автоматическое регулирование визирных марок, проецируемых видеопроектором, позволяет располагать визирную марку 31 локально вокруг кластера 32.
Каждый элемент каждого датчика 30 воссоздает в вычислительном устройстве информацию сигнала, принимаемого вычислительным устройством. Вычислительное устройство на основании распределения света на датчике может путем моделирования приблизительно рассчитать положение кластера в плоскости изображения. На практике при образовании визирных марок, а также при проведении расчета параметров положения и (или) пространственного положения учитываются поправки на деформацию, связанную с проецированием.
Скорость проецирования изображений, воспроизводимых голографическим видеопроектором, должна быть больше, чем скорость перемещения объекта.
С этой целью голографический видеопроектор способен передавать непрерывный ряд изображений со скоростью 24 изображения в секунду. Такая скорость является достаточной для передачи двух последовательных визирных марок, по меньшей мере, на один кластер.
Согласно другому способу функционирования представляется необходимым определить положение и ориентацию объекта, т.е. априори не зная первоначального положения и ориентации объекта.
Средством, при помощи голографического видеопроектора, расчета положения объекта в зоне пространства для свободного перемещения является возможность передать чередование визирных марок в достаточно короткий промежуток времени. При каждом проецировании одна визирная марка занимает полностью или большую часть образуемого изображения. Кроме того, между двумя проецированиями, которые следуют друг за другом, светлые рисунки этих визирных марок отличаются друг от друга.
Анализ сигналов, принимаемых от каждого элемента каждого датчика в течение всего чередования, позволяет рассчитать положение датчиков в пространстве.
На фиг.4 изображен пример круглых визирных марок 42 и 44, рисунки которых являются светлыми полосами, разделенными между собой темными полосами, соответственно вертикальными или горизонтальными.
Первый ряд визирных марок представляет собой особое чередование визирных марок, рисунками которых являются прямые вертикальные полосы. Это чередование изображений сформировано в отрезок времени 43. Анализ чередования сигналов, принимаемых элементом, позволяет рассчитать вертикальное положение каждого элемента в визирной марке.
Второй ряд визирных марок представляет собой другое чередование визирных марок, рисунками которых являются прямые горизонтальные полосы. Это чередование изображений сформировано во второй отрезок времени 43. Анализ чередования сигналов, принимаемых элементом, позволяет рассчитать горизонтальное положение каждого элемента в визирной марке.
Общее чередование изображений состоит из двух предыдущих чередований. Эти чередования изображений способны, например, формироваться последовательно. Каждое изображение может содержать визирную марку с горизонтальными полосами, за которой следует визирная марка с вертикальными полосами.
Кластер 40 изображен в плоскости визирной марки, так называемой плоскости изображения, при этом данный кластер подвергается воздействию световых сигналов рисунков каждой визирной марки. Принцип заключается в передаче в отрезок времени 43 очередности визирных марок 42, каждая из которых подвергается воздействию в период времени 41. Ширина полос и шаг между полосами, которые составляют каждую визирную марку, становятся все меньше и меньше. Они могут уменьшаться, например, на множитель, равный двум, между каждым проецированием.
На фиг.5 изображен пример компиляции 52 визирных марок 42, содержащих светлые вертикальные полосы, и другой компиляции 54 визирных марок 44, содержащих светлые горизонтальные полосы. Компиляция визирных марок, содержащих вертикальные полосы, представляет собой чередование светлых или темных сигналов, принимаемых элементом датчика, когда он находится в полосе 55 во временном шаге 41. Непрерывный ряд сигналов, принимаемых в промежуток времени 43, подвергается анализу. Путем моделирования выводится горизонтальное положение элемента в визирной марке.
Аналогичным образом на основании компиляции визирных марок 54 выводится вертикальное положение элемента, когда он находится в полосе 56.
Для устранения всей неопределенности положения во время проецирования на датчики первого изображения, т.е. различить случай принимаемого элементом сигнала, поступающего от темной полосы, и случай, когда никакой сигнал не принимается, необходимо, чтобы светлые полосы двух первых проецируемых визирных марок чередовались и имели одинаковые размеры.
Предпочтительно, для анализа этих сигналов может использоваться двоичное кодирование. В том случае, если сигнал поступает от светлой полосы, элемент вырабатывает двоичный разряд значения, равный 1, в обратном случае - вырабатывает двоичный разряд значения, равный 0.
Полосы, уменьшающиеся в рамках одного чередования от одного проецирования к другому, старшие двоичные разряды вырабатываются в начале чередования. Информация о точности вертикального и (или) горизонтального положения вырабатывается в конце чередования младшими двоичными разрядами.
Такие чередования визирных марок, соответствующие данному типу двоичного кодирования принимаемого сигнала, позволяют непосредственно определить вертикальное и соответственно горизонтальное положение элемента датчика в визирной марке.
Точность положения элемента датчика определяется с ошибкой, равной приблизительно ширине светлой или темной полосы последней проецируемой визирной марки чередования.
Как правило, все изображение или ряд изображений, которые не являются неопределенными, могут использоваться в качестве средств определения первоначального положения.
Два способа функционирования - автоматически регулируемый и категоричный - могут комбинироваться. Во время инициализации или повторной инициализации определения объекта, т.е. когда положение объекта неизвестно, положение и ориентация объекта могут быть установлены при помощи второго способа определения. Затем в течение второго периода времени, после определения на этапе инициализации положения и ориентации начинается этап определения способом автоматического регулирования. Второй этап длится в независимом режиме до тех пор, пока произвольно не будет прервано определение или пока не будет потеряно местоположение объекта. В этом последнем случае первый этап, т.е. второй способ функционирования, может быть возобновлен в автоматическом или ручном режиме для повторного определения положения объекта.
Использование способа автоматического регулирования представляет интерес ввиду того, что он позволяет формировать очень ограниченное количество визирных марок между двумя измерениями. Как следствие, могут использоваться очень быстрые темпы измерений.
Реферат
Настоящее изобретение относится к устройству оптического определения положения и (или) пространственного положения объекта (5), перемещающегося в заданной зоне свободного пространства для перемещения (4); при этом данное устройство содержит электрооптические датчики, располагаемые на данном объекте, которые распределены по группам, называемым кластерами (6), средства анализа и вычисления (2), позволяющие определить положение и (или) пространственное положение данного предмета, электронные средства формирования изображения (1) и оптические средства проецирования (1), содержащие устройство визуального вывода и проекционную оптику. Устройство отличается тем, что оптические средства проецирования передают в рамках проекционного конуса четкое изображение (3) в любой точке зоны свободного пространства для перемещения, анализ сигналов, принимаемых датчиками, по меньшей мере, одного кластера, позволяет определять положение и (или) пространственное положение объекта в системе отсчета, установленной средствами проецирования, при этом система отсчета сформирована плоскостью, перпендикулярной оси проецирования. 4 н. и 19 з.п. ф-лы, 5 ил.
Комментарии