Способ определения ориентации и положения объекта в пространстве - RU2431863C2
Код документа: RU2431863C2
Чертежи
Описание
Изобретение относится к способу оптического определения положения и ориентации объекта в пространстве. Говоря более конкретно, этот способ применяется в авиационной области. В этом случае упомянутый объект представляет собой шлем пилота, содержащий систему визуализации на этом шлеме.
Определение положения и ориентации объекта в пространстве представляет собой проблему, касающуюся многих технических областей. Обычно предлагаемые различные технические решения в качестве основных характеристик должны обладать способностью устранить всякую неоднозначность положения или ориентации, способностью соответствовать более или менее жесткой динамике систем и обеспечивать высокую точность определения.
Эти системы используются в авиации для определения положения головы, в частности, для шлемов пилотов военных самолетов, а также пилотов военных, гражданских или полугражданских вертолетов. Такие системы используются также для определения положения и ориентации шлемов симуляторов, причем в этом случае такое определение может использоваться в сочетании с окулометрическим устройством, также называемым эйтрекером (еуеtrаскеr) для определения направления взгляда человека. В области виртуальной реальности и компьютерных игр также существуют многочисленные применения подобных систем.
В настоящее время оптические системы определения позы основываются на двух главных принципах. В первую очередь имеется возможность идентифицировать на изображении, реализуемом, например, при помощи матричного датчика, положение точечных световых излучателей. При этом в качестве таких световых излучателей могут быть использованы электролюминисцентные диоды, называемые светоизлучающими диодами (LЕD). В то же время другое техническое решение состоит в наблюдении недвусмысленного рисунка, отпечатанного на объекте, положение и ориентация которого подлежат определению. С этой целью используют одну или несколько видеокамер, предназначенных для наблюдения этого рисунка и его анализа на основе полученных изображений.
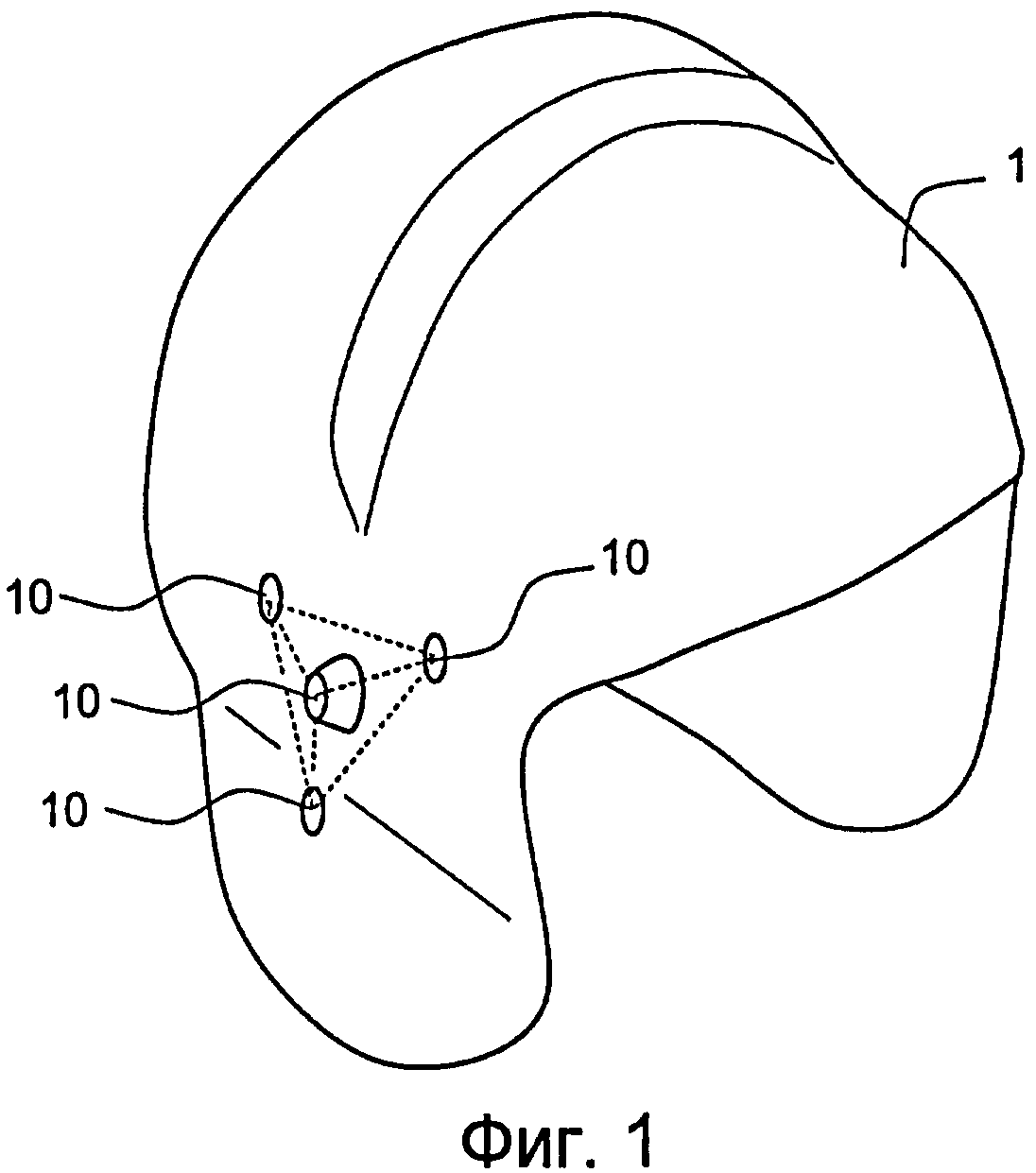
В случае использования световых источников типа светодиодов LЕD эти источники располагаются группами. Эти группы светодиодов LЕD также называют кластерами (сlustеr). В случае применения в области авиации эти кластеры, размещаемые на шлеме, обычно не располагаются в одной плоскости и представлены во многих случаях в форме тетраэдра на шлеме.
На Фиг.1 представлен шлем 1, используемый в авиации для систем определения положения и ориентации объекта в пространстве. Светодиоды 10, размещенные на шлеме, образуют кластер в форме тетраэдра. Этот тетраэдр на Фиг.1 показан пунктирными линиями. Система такого типа требует использования датчиков, обычно видеокамер, размещаемых в кабине пилотов. Здесь речь идет об устройстве, содержащем множество излучателей и множество приемников, в котором излучатели представляют собой светодиоды и приемники представляют собой видеокамеры.
Анализ информации, поступающей от датчиков, является сложным, принимая во внимание пространственную геометрию, которая требует большого объема вычислений. В то же время приведение в действие системы этого типа может представлять определенные ограничительные аспекты с точки зрения быстроты выполнения вычислений и может, таким образом, затрагивать точность работы подобных систем. При этом для достижения требуемой точности датчик типа видеокамеры должен иметь высокую разрешающую способность и обработка информации датчика предлагает предсказание положения светодиодов LЕD и анализ интересующих зон.
Существуют различные варианты систем этого типа, в частности устройства определения тени от решетки, освещенной при помощи источника света, установленного на шлеме. Эти системы представляют ограничение на определение, с требуемой точностью, ориентации объекта, подлежащего идентификации.
Способ определения положения и ориентации объекта путем наблюдения рисунка на объекте при помощи видеокамер является менее точным. Этот способ требует выполнения большого объема вычислений и ставит проблемы использования в возмущенной окружающей среде. Способ улучшения характеристик такой системы состоит в увеличении количества датчиков и размещении этих датчиков оптимальным образом. Тем не менее, это техническое решение остается достаточно сложным в реализации.
В целом современные технические решения, обеспечивающие определение положения и ориентации объекта в пространстве и используемые в области авиации, представляют некоторые ограничения, связанные с компромиссом между использованием технических решений, предельно тяжелых с точки зрения необходимых вычислений, и требованиями обеспечения заданной точности. В то же время специфические условия авиационной окружающей среды заставляют обеспечивать резервирование оптических средств или датчиков и не позволяют использовать достаточно простые технические решения.
Способ в соответствии с предлагаемым изобретением позволяет, в частности, устранить отмеченные выше недостатки. Действительно, предлагаемое устройство содержит датчики или излучатели, сгруппированные в кластер, имеющий форму параллелограмма. Способ определения положения датчиков вследствие этого является достаточно простым в использовании и требует весьма незначительных вычислений, причем этот способ является детерминистическим. Этот способ является весьма выгодным в случае следящих систем, где время между двумя измерениями уменьшено и точность определения возрастает.
Предпочтительным образом оптический способ определения положения и ориентации объекта в пространстве реализуется посредством оптического устройства, содержащего по меньшей мере один первый параллелограмм (А′В′C′D′), жестко связанный с упомянутым объектом, и имеющего в своем составе оптические средства и электронные средства анализа, позволяющие определить координаты четырех вершин первого параллелограмма (А′В′C′D′) в ортонормированной системе координат (Rо(О,


Предлагаемый способ содержит несколько этапов:
- первый этап определения второго опорного параллелограмма (АоВоСоDо), центр (О) которого представляет собой центр системы координат (Rо(О,
- второй этап определения преобразования, в результате которого первый параллелограмм (А′В′C′D′) будет представлять собой изображение второго параллелограмма (АоВоСоDо), причем это преобразование раскладывается на смещение

- третий этап определения при помощи оптических средств четырехугольника (АВСD), получаемого при помощи проекции параллелограмма (А′В′C′D′) в плоскость изображения (Рi) с ненулевой абсциссой Хi в системе координат (RО) с центром в О вдоль направления (


- четвертый этап определения:
а) первой точки (Е), принадлежащей плоскости изображения (Рi), когда она существует, такой, чтобы первая точка (Е) представляла собой пересечение прямых, образованных двумя противоположными сторонами (АВ, СD) четырехугольника;
б) второй точки (F), принадлежащей плоскости изображения (Рi), когда она существует, такой, чтобы вторая точка (F) представляла собой пересечение прямых, образованных двумя другими сторонами (АС, ВD) этого четырехугольника;
в) первого вектора

г) второго вектора

- пятый этап определения соответствующих изображений единичных векторов

- шестой этап определения смещения


- и наконец, седьмой этап может быть реализован для того, чтобы определить координаты вершин (А′, В′, C′, D′) первого параллелограмма в системе координат Rо на основе известных координат вершин (Ао, Во, Со, Dо) второго параллелограмма, а также преобразования, состоящего из смещения u и поворота r.
Предпочтительным образом способ определения может содержать специфические формы параллелограммов, такие, например, как ромбы, прямоугольники или квадраты.
Предпочтительным образом предлагаемый способ оптического определения может содержать оптические средства, имеющие в своем составе голографический видеопроектор, излучающий в изображение отчетливые световые рисунки в любой точке зоны отклонения упомянутого объекта, и по меньшей мере два идентичных линейных матричных датчика, параллельных между собой и размещенных на данном объекте, причем четыре конца двух этих датчиков образуют параллелограмм.
Предпочтительным образом способ оптического определения может содержать оптические средства, имеющие в своем составе видеокамеру и по меньшей мере четыре излучающих светодиода, располагающихся на данном объекте, каждый из которых представляет концы параллелограмма.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания примера его реализации, где даются ссылки на приведенные в приложении чертежи, на которых:
- Фиг.1 представляет шлем пилота в соответствии с предшествующим уровнем техники;
- Фиг.2 представляет характеристики опорного параллелограмма;
- Фиг.3 представляет трехмерный (3D) вид рисунка параллелограмма, полученного из его проекции на плоскость изображения;
- Фиг.4 представляет точки схождения чертежа, показанного на Фиг.3, в том случае, когда эти точки существуют;
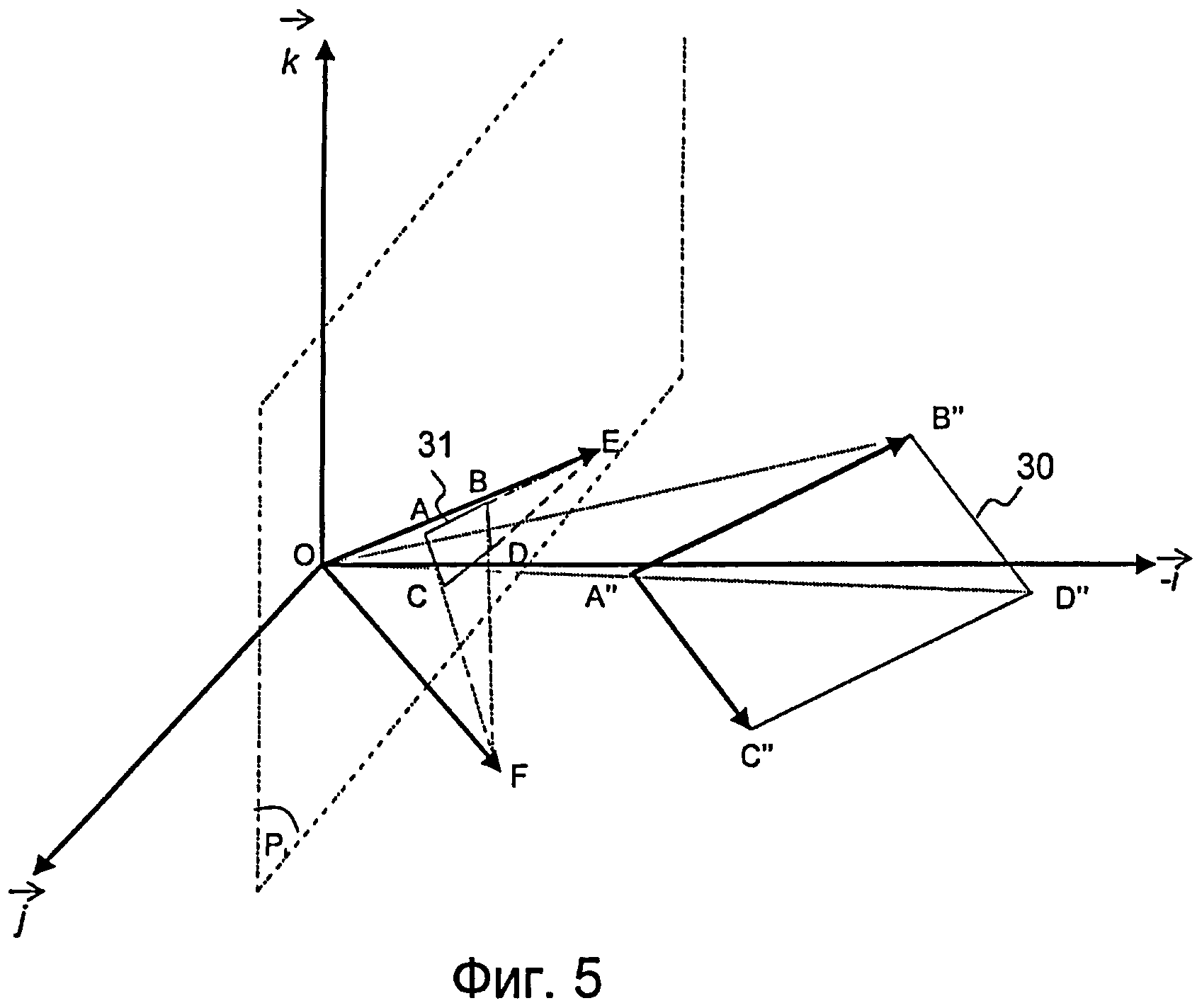
- Фиг.5 представляет векторы, известные в системе координат Rо, точек схождения чертежа, показанного на Фиг.3;
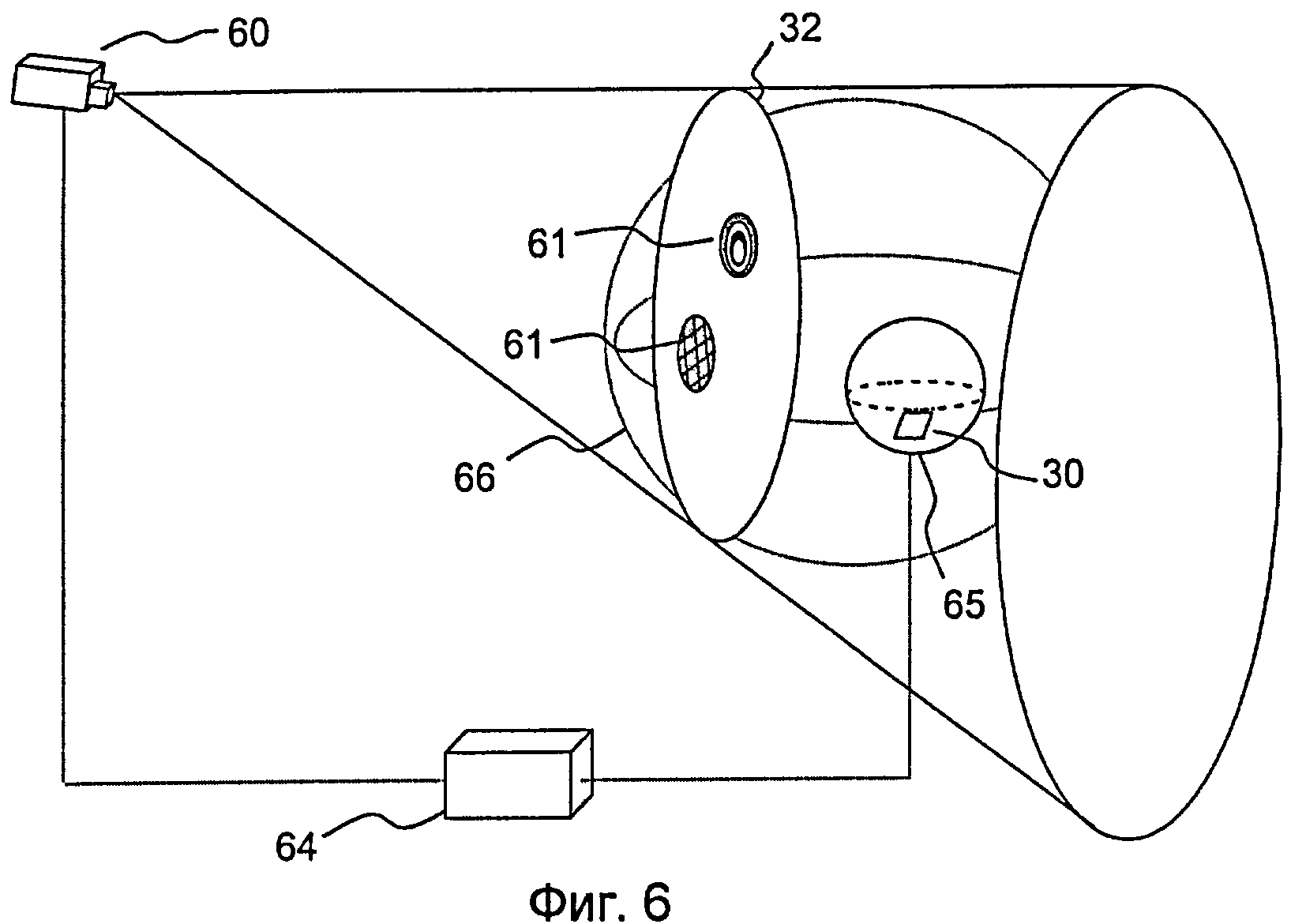
- Фиг.6 представляет пример оптического устройства в соответствии с предлагаемым изобретением.
Способ оптического определения в соответствии с предлагаемым изобретением состоит в определении вершин параллелограмма А′В′С′D′, располагающегося в пространственной системе координат Rо, обозначенной как Rо
Характеристиками параллелограмма А′В′С′D′ могут быть, например, его высота, его ширина и координаты одной из его точек в системе координат Rо. Разумеется, может оказаться подходящим и любой другой способ представления.
Это определение параллелограмма осуществляется посредством оптического устройства, позволяющего, когда этот параллелограмм закреплен на объекте, засечь положение и ориентацию этого объекта в системе координат Rо.
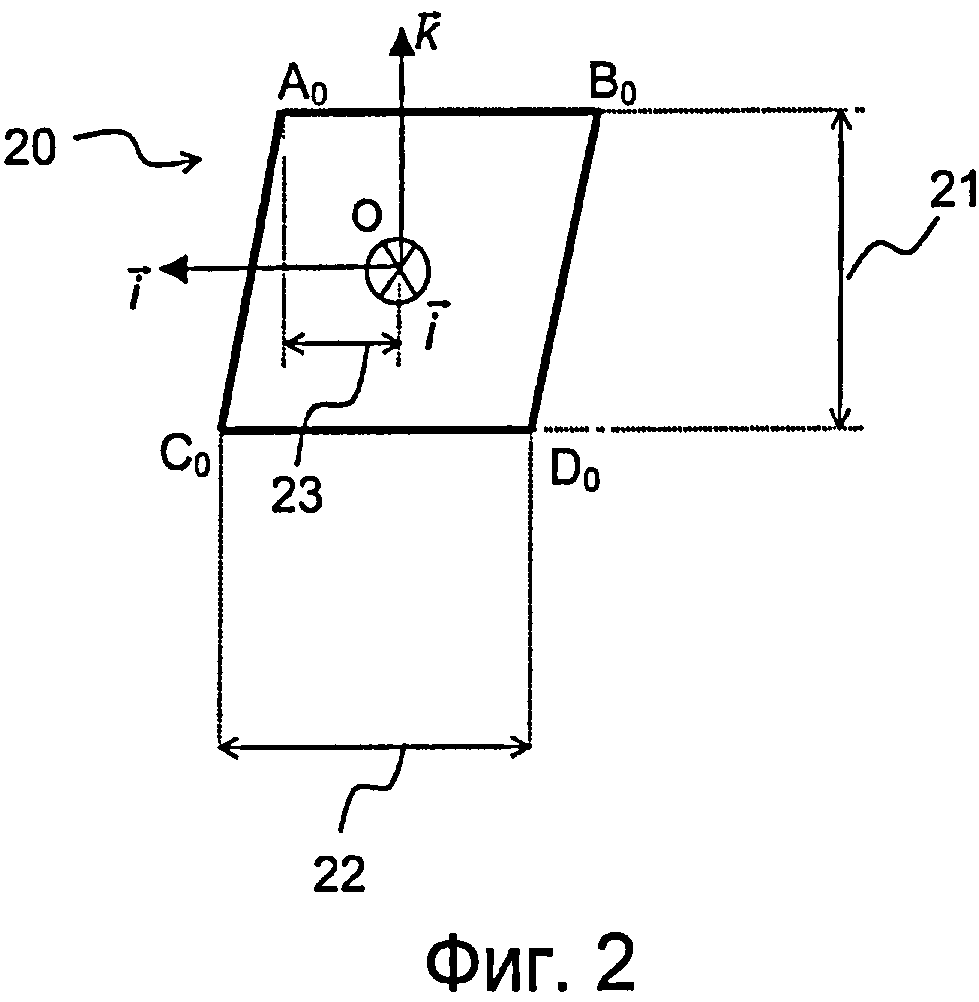
На Фиг.2 представлен пример параллелограмма 20 с вершинами Ао, Во, Со и Dо, характеристики которого являются такими же, как и характеристики параллелограмма А′В′С′D′, положение и ориентация которого в системе координат Rо подлежат определению. Параллелограмм 20 обладает четырьмя сторонами, обозначенными АоВо, СоDо, АоСо и ВоDо и попарно параллельными между собой. Высота 21 этого параллелограмма обозначена Н, его ширина 22 обозначена L и координата 23 вершины Ао в системе координат Rо вдоль оси

Четыре точки определяются в системе координат Rо при помощи следующих четырех уравнений:

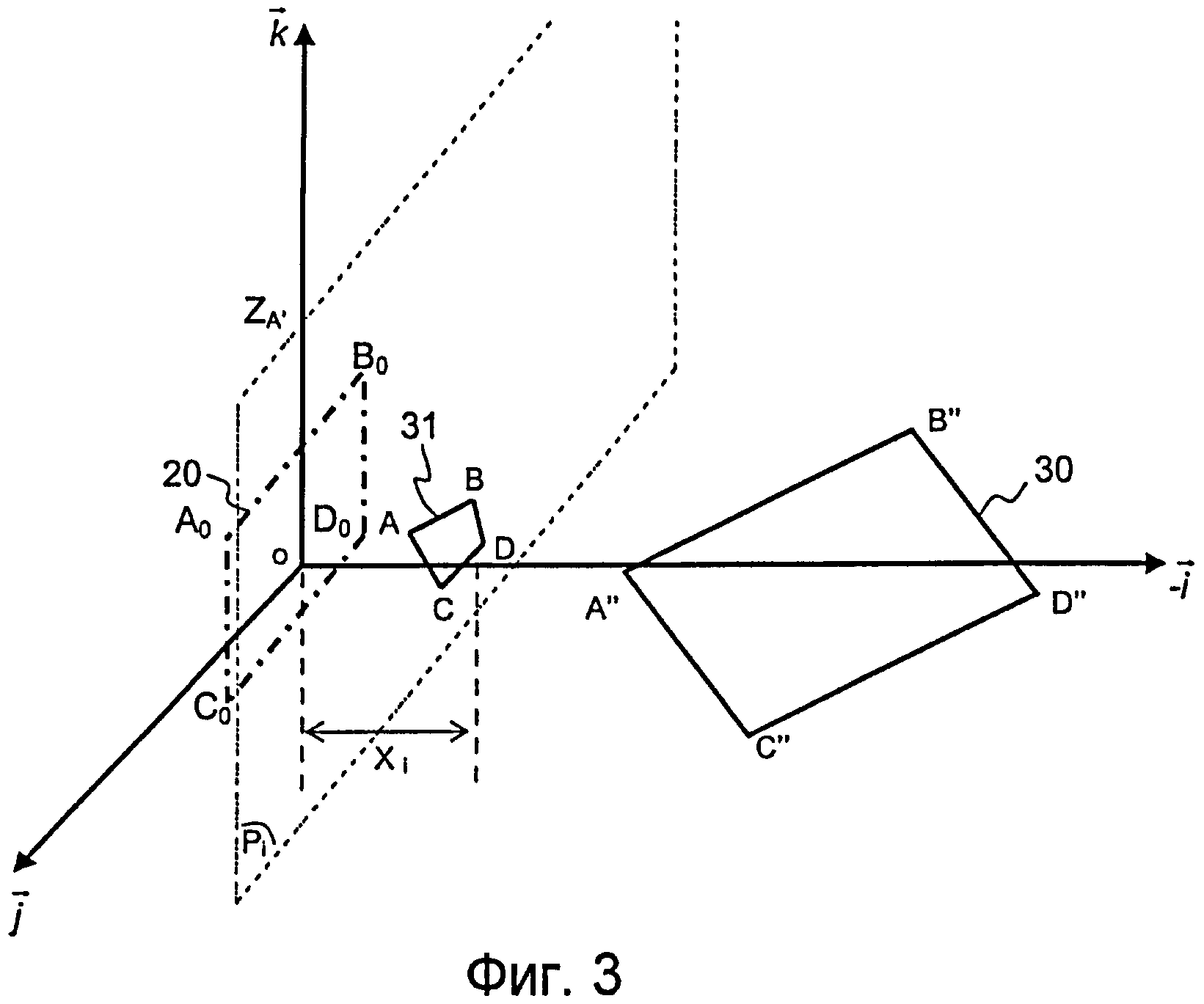
Как это показано на Фиг.3, этот опорный параллелограмм размещается в системе координат Rо таким образом, чтобы его центр был О. При этом плоскость (О,

При этом знание координат четырех вершин параллелограмма А′В′С′D′ в системе координат Rо эквивалентно знанию аналитического преобразования, которое позволяет получить параллелограмм А′В′С′D′ из параллелограмма 20.
Поскольку заданным является то обстоятельство, что два упомянутых параллелограмма имеют одни и те же характеристики, существует непосредственный векторный поворот r относительно оси, проходящей через О, и смещение

На Фиг.3 представлен параллелограмм 30, обозначенный А′В′C′D′ в системе координат Rо. Его рисунок 31, полученный в результате проекции А′В′C′D′ на плоскость Рi, представлен четырехугольником АВСD.
Поскольку координаты четырехугольника АВСD в системе координат Rо известны в результате использования предлагаемого способа оптического определения, алгоритм позволяет на основе рисунка 31 и опорного параллелограмма 20 знать преобразования r и


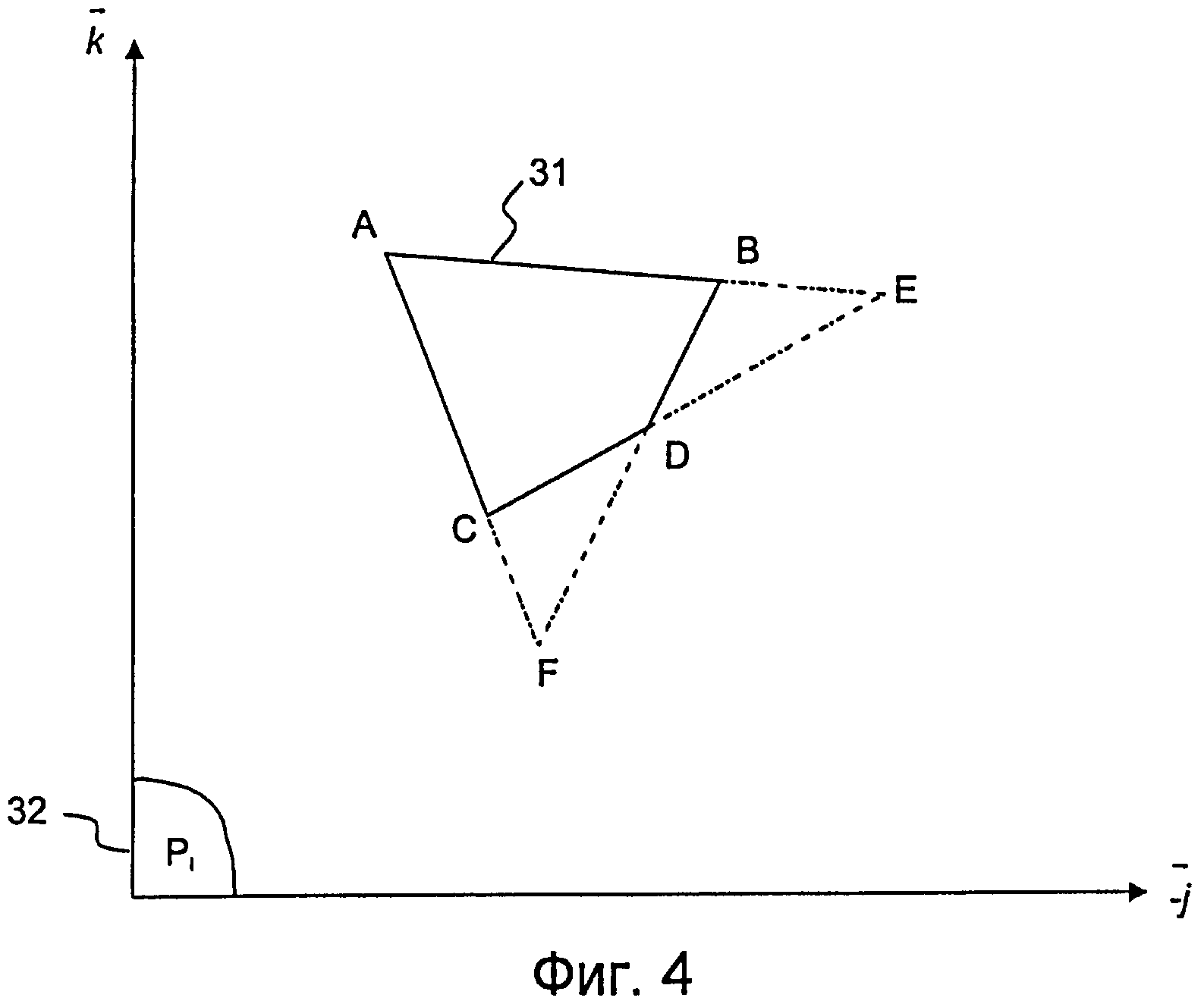
На Фиг.4 представлен в плоскости Рi четырехугольник АВСD. Координаты точек пересечения прямых (АВ) и (СD) и прямых (АD) и (ВС), когда они существуют, что соответствует наиболее часто встречающемуся случаю, определяются в результате знания координат точек А, В, С и D в системе координат Rо. При этом позицией Е обозначена точка пересечения прямых (АВ) и (СD), и позицией F обозначена точка пересечения прямых (АD) и (ВC). В этом случае позицией




Известно, что вектор




На Фиг.5 представлены, когда они существуют, векторы


Те случаи, когда точка Е не существует, или точка F не существует, или не существуют обе эти точки Е и F, отвечают соответственно следующим соотношениям, которые вытекают из геометрии четырехугольника АВСD:
- стороны АВ и СD являются параллельными друг другу. При этом четырехугольник АВСD представляет собой трапецию вдоль стороны АВ, то есть это означает что сторона А′В′ является параллельной плоскости изображения, а сторона А′С′ не является параллельной этой плоскости. При этом определяют следующие соотношения:



- стороны ВС и АD являются параллельными друг другу, и АВСD представляет собой трапецию вдоль ВС, то есть это означает, что сторона А′С′ является параллельной плоскости изображения, а сторона А′В′ не является параллельной этой плоскости. При этом определяют следующие соотношения:


- АВСD представляет собой параллелограмм, то есть это означает, что параллелограмм А′В′С′D′ является параллельным плоскости изображения. При этом получают два следующих соотношения:
В том случае, когда Е и F существуют, производятся следующие расчеты, причем естественным образом выполняются соответствующие упрощения для специфических случаев, когда одно определенное решение существует для каждого случая.
Из соотношения
откуда получается, что:
принимая во внимание, что:
Кроме того, из соотношения

Отсюда получается, что:
где q=L-2Т.
При этом, поскольку r представляет собой здесь непосредственный поворот, получают выражение:
Три изображения, соответствующие векторам



Из соотношения
Если обозначают как µЕ известную реальность, такую, что выполняется соотношение

Аналогичным образом имеют параметр µF в качестве реальности, определяемой соотношением


После этого получают аналитический результат искомого смещения в виде:

где величина k известна.
Параллелограмм А′В′C′D′ устанавливается путем определения преобразования, образованного известным векторным поворотом и известным смещением опорного параллелограмма АоВоCоDо.
В том случае, когда параллелограмм А′В′C′D′ представляет собой ромб, получают дополнительное соотношение:

В том случае, когда параллелограмм А′В′C′D′ представляет собой прямоугольник, получают дополнительное соотношение:
В том случае, когда параллелограмм А′В′C′D′ представляет собой квадрат, аналитические выражения преобразований векторов


Два этих дополнительных соотношения, соответствующих случаю ромба и прямоугольника, также пригодны, каждое из них, для случая квадрата.
На Фиг.6 представлен пример устройства в соответствии с предлагаемым изобретением. Объект 65 содержит электрооптические приемники типа линейных матричных датчиков и средство проецирования изображений, причем упомянутые изображения содержат световые рисунки 61.
Упомянутые датчики сгруппированы таким образом, чтобы они попарно формировали параллелограммы 30. Эти датчики попарно параллельны между собой и имеют одинаковые размеры.
В то же время пример средства проецирования изображения в соответствии с предлагаемым изобретением состоит в использовании оптического средства, излучающего в любой точке зоны 66 отклонения объекта 65 четкое изображение. Датчики, размещенные на шлеме, принимают недвусмысленные сигналы, поступающие от этого изображения.
Для этого в примере реализации предлагаемого изобретения в качестве проекционного средства используется голографический видеопроектор 60. Такие голографические видеопроекторы изготавливаются и поставляются на рынок фирмой Light Blue Optics и известны под торговой маркой PVPro. Этот голографический видеопроектор обладает весьма предпочтительным свойством излучать четкое изображение в любой точке зоны 66 отклонения объекта.
Этот голографический видеопроектор, в последующем изложении называемый проектором VPH, имеет в своем составе когерентный источник света, который обычно представляет собой лазерный диод, дисплей, позволяющий реализовать фазовое изображение, оптические средства, размещенные таким образом, чтобы создать на основе волны, излученной источником света, первую опорную волну и вторую волну, модулированную при помощи дисплея, и средства, позволяющие заставить интерферировать эти волны. Конечное полученное изображение представляет собой голограмму Фраунхофера (Fraunhofer) фазового изображения, создаваемого на дисплее. При этом имеется возможность создавать при помощи этого средства изображение любого типа. Дисплей может представлять собой жидкокристаллический дисплей, например, типа LCOS.
В этих условиях центр О системы координат Rо определяется как точка VРН и плоскость

Для того чтобы определить координаты объекта в пространстве, голографический видеопроектор VРН излучает изображения, содержащие световые рисунки 61, на датчики, располагающиеся на шлеме. Анализ информации, поступающей с этих датчиков, осуществляется при помощи цифрового вычислителя 64, установленного после датчиков в цепи обработки принятых сигналов.
Анализ сигналов, принятых каждой ячейкой, позволяет восстановить рисунок, получаемый при помощи проекции параллелограмма, позиционированного на объекте, в плоскости изображения. Рисунок определяется практически естественным образом при помощи фотографии деформированных рисунков в локальной плоскости параллелограмма. Зная оригинальные рисунки и их деформации, идентифицированные при помощи датчиков, знание априори характеристик параллелограмма дает его рисунок в обратном отображении. Этот рисунок представляет собой четырехугольник в плоскости изображения.
На основе этого рисунка и знания характеристик параллелограмма, известных априори, предлагаемый способ позволяет достаточно простым способом определить положение и ориентацию кластера в системе координат Rо.
Второй вариант реализации состоит в рассмотрении оптического устройства, содержащего, по меньшей мере, одну видеокамеру и шлем пилота, содержащий светоизлучающие диоды, сгруппированные в кластер. По меньшей мере, один кластер образует параллелограмм А′В′С′D′, вершины которого представляют собой светодиоды.
В этих условиях зона отклонения объекта представляет собой всю или некоторую часть кабины экипажа.
Центр системы координат Rо представляет собой видеокамеру, и плоскость
Таким образом, средства анализа имеют возможность на основе знания представления четырехугольника в известной плоскости изображения и характеристик параллелограмма, известных априори, определить положение и ориентацию кластера.
Реферат
Изобретение относится к способу оптического определения положения и ориентации некоторого объекта при помощи оптического устройства, содержащего по меньшей мере один параллелограмм, жестко связанный с упомянутым объектом, причем это оптическое устройство имеет в своем составе оптические средства и электронные средства анализа, дающие возможность определить координаты четырех вершин параллелограмма A'B'C'D' в ортонормированной системе координат с центром в точке О, обозначенной Ro(O, , , ). Принцип действия этого устройства состоит в определении вершин параллелограмма A'B'C'D' на основе знания характеристик параллелограмма и четырех известных точек четырехугольника ABCD. Этот четырехугольник представляет рисунок, полученный из проекции параллелограмма A'B'C'D' в известную плоскость изображения. Характеристиками параллелограмма A'B'C'D' могут быть, например, его высота, его ширина и координаты одной из его точек в упомянутой системе координат Ro. Достигаемый технический результат - устранение неоднозначности в определении положения или ориентации объекта. 7 з.п. ф-лы, 6 ил.
Формула



первый этап определения второго опорного параллелограмма (AoBoCoDo), центр (О) которого представляет собой центр системы координат (Ro(O,
- второй этап определения преобразования, в результате которого первый параллелограмм (A'B'C'D') представляет собой изображение второго параллелограмма (AoBoCoDo), причем это преобразование раскладывается на смещение

- третий этап определения при помощи оптических средств четырехугольника (ABCD), получаемого при помощи проекции первого параллелограмма (A'B'C'D') в плоскость изображения (Pi) с ненулевой абсциссой Xi в системе координат (RO) с центром О вдоль направления (
- четвертый этап определения:
* первой точки (Е), принадлежащей плоскости изображения (Pi), когда она существует, такой, чтобы первая точка (Е) представляла собой пересечение прямых, образованных двумя противоположными сторонами (АВ, CD) четырехугольника;
* второй точки (F), принадлежащей плоскости изображения (Pi), когда она существует, такой, чтобы вторая точка (F) представляла собой пересечение прямых, образованных двумя другими сторонами (AC, BD) четырехугольника;
* первого вектора (

* второго вектора (

- пятый этап определения соответствующих изображений единичных векторов

- шестой этап определения смещения (
Комментарии