Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов - RU2661357C1
Код документа: RU2661357C1
Чертежи
Описание
Изобретение относится к области радиотехники и может использоваться в системах обзорной пассивной радиолокации и радиотехнического наблюдения для однопозиционного высокоточного определения скоростей, координат и траекторий перемещающихся в пространстве радиоизлучающих объектов (РИО).
Перемещающиеся объекты различного назначения - искусственные спутники Земли, корабли, самолеты, беспилотные летательные аппараты - оснащаются радиопередающими устройствами для обмена служебной информацией между собой и с командными пунктами, поэтому по излучениям бортовых радиопередающих устройств этих объектов их можно обнаружить, а также определить их угловые координаты (УК). Для этого применяются методы пассивной радиолокации [1 - Пассивная радиолокация: методы обнаружения объектов / Под ред. проф. Р.П. Быстрова и проф. А.В. Соколова. М.: Радиотехника. 2008. 320 с].
Пассивные радиолокационные системы (РЛС), в отличие от активных, обладают скрытностью, что существенно затрудняет определение их дислокации и характеристик, а также менее сложны и имеют меньшую стоимость из-за отсутствия радиопередающей части. Направление на РИО с их помощью определяется достаточно просто (путем пеленгования), однако прямое однопозиционное измерение дальности в пассивной радиолокации невозможно, так как зондирующие излучения не используются. Для определения местоположений и траекторий движения РИО пассивными методами обычно применяют несколько разнесенных станций, объединенных с помощью ретрансляторов данных в многопозиционную систему. Но такая система, по сравнению с однопозиционной, имеет больший объем аппаратуры, повышенную сложность и стоимость. Поэтому однопозиционные системы более предпочтительны.
РЛС должны определять УК целей с высокой точностью за достаточно малое время, так как современные цели могут перемещаться с большими (в том числе гиперзвуковыми) скоростями и двигаться по сложным непредсказуемым траекториям, причем закон движения целей может содержать знакопеременные производные высоких порядков. Лучшей основой для достижения высокой точности определения УК считается широко применяемый в радиолокации и радиопеленгации моноимпульсный метод. Он используется и в обзорных РЛС, которые одновременно определяют УК всех целей, находящихся в пределах диаграммы направленности (ДН) и разрешаемых по дальности [2 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984. 312 с, стр. 6]. При этом УК цели определяют как направление прихода принимаемых сигналов относительно известного равносигнального направления (РСН).
Если для следящих систем принципиально важными являются крутизна пеленгационной характеристики (ПХ) углового дискриминатора и смена знака сигнала рассогласования в нуле, то для обзорной РЛС важны дополнительно величина рабочей зоны (то есть области углов внутри моноимпульсной группы лучей, в которой ошибка пеленгования не превышает заданной) и степень линейности ПХ в рабочей зоне; они определяют точностные характеристики и быстродействие обзорной системы. Пути достижения высоких точностей и быстродействия обзорного амплитудного моноимпульсного пеленгатора обоснованы в работах [3 - Джиоев А.Л., Яковленко В.В. Улучшение характеристик обзорного суммарно-разностного пеленгатора с ФАР на основе оптимизации пеленгационной характеристики // Общие вопросы радиоэлектроники. Ростов-на-Дону: ФГУП «РНИИРС» ФНПЦ. 2014. Вып. 1. С. 105-117] и [4 - Патент 2583849, РФ. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов / Джиоев А.Л., Омельчук И.С., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявлен 13.04.2015, опубликован 10.05.2016], в которых с помощью выбора вида весовой функции (ВФ) и оптимизации угла разноса ДН получена ПХ, практически линейная на всей ширине моноимпульсной группы лучей (МГЛ). Это позволяет после приема и аналого-цифрового преобразования (АЦП) сигналов РИО использовать прямо-отсчетный подход и обеспечить быстрый прямой (без использования итераций и повторного зондирования) и легко реализуемый (решение линейного уравнения) расчет УК с ошибкой не более 1/100 ширины ДН по уровню половинной мощности при низком уровне боковых лепестков (ниже минус 40 дБ) и приемлемом использовании поверхности антенны. Высокая линейность ПХ на всей ширине МГЛ, обеспечивающая быстрое и точное определение УК объекта без использования итерационного алгоритма, значительно сокращает время обзора пространства и увеличивает число объектов, контролируемых без перемещения РСН. Однако при этом не определяются траектории движения объектов в пространстве, а также не производится их селекция по скорости движения.
Так как в общем случае (без использования дополнительных данных) однопозиционная локация не обеспечивает эффективное определение наклонных дальностей, скоростей и траекторий движения перемещающихся по произвольным траекториям РИО, то поиск способов и создание устройств обзорной пассивной однопозиционной моноимпульсной локации, обеспечивающих высокоточное определение скоростей, координат и траекторий перемещающихся в пространстве объектов, являются актуальными.
Известен способ определения из одной точки наклонной дальности до движущейся цели [5 - Патент 2557808, РФ. Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором / Борисов Е.Г., Мартемьянов И.С. Заявлен 9.04.2014, опубликован 27.07.2015]. В нем совместно обрабатывают два последовательных во времени измерения пеленгов (углов азимута β1 и β2) и мощностей РС1 и РС2 сигналов для моментов измерений t1 и t2. Учитывая, что базовая точка измерения соответствует геометрическому центру угломерной системы, а линия Ц1ЦN (траектория движения цели) соответствует точкам Ц1 и Ц2 измерения пеленга цели в моменты времени t1 и t2, в предположении, что цель движется прямолинейно, на основании полученных значений РС1 и РС2 вычисляют величину

где с - скорость света;
T=Δt12.
Точностные характеристики способа [5] определяются, в частности, ошибками измерения угловых координат РИО и несущих частот излучаемых им сигналов. При возможных точностях измерений указанных первичных параметров погрешность определения наклонной дальности зависит от ее значения и находится в пределах 5-35%. Кроме того, в реальных условиях объекты наблюдения обычно излучают модулированные сигналы с подавленной несущей, что не позволяет применять способ [5].
Наконец, при использовании способа [5] измеряют мощность принимаемых сигналов, а она подвержена флюктуациям, которые вызываются интерференцией колебаний, переотраженных элементами конструкции объекта, изменениями условий распространения и переотражениями от местных предметов. Величина этих флюктуаций может достигать 10-15 дБ; погрешность измерения дальности по способу [5] при коэффициенте флюктуаций, равном 6 дБ, составляет 5%, а при коэффициенте флюктуаций, равном 12 дБ, достигает 250%, то есть способ становится неработоспособным.
Таким образом, недостатками способа [5] являются большая погрешность измерения дальности из-за флюктуаций уровня сигнала и невозможность измерения дальности в случае использования в качестве сигналов сложных модулированных излучений.
Наиболее близким по технической сущности к заявляемому способу является способ, предложенный в [6 - Патент 2617830, РФ. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа / Джиоев А.Л., Омельчук И.С., Тюрин Д.А., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявлен 11.04.2016, опубликован 28.04.2017], принятый за прототип.
При использовании способа [6] во время приема констатируют обнаружение сигнала РИО и определяют его параметры - ширину спектра, среднюю частоту спектра сигнала и вид модуляции. Осуществляют автосопровождение выбранного объекта по угловым координатам, измеряют и запоминают значения отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам. Затем восстанавливают, зная вид модуляции, несущую частоту ƒH принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов. Далее вычисляют приращения УК и доплеровских сдвигов частоты принимаемых сигналов на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте Н.
После этого определяют горизонтальные составляющие приращений доплеровских сдвигов частоты, находят эти приращения и вычисляют величину их отношения
для нахождения величины угла α между вектором скорости и горизонтальной дальностью. Далее определяют текущее значение курсового угла qk=βk+α и модуль горизонтальной скорости Vг=V, а затем - расстояние S4,0, пройденное объектом за интервал времени Δt4,0. Затем находят радиус R окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр О' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4, используя соотношение
Наконец, вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта на постоянной высоте и осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение.
Таким образом, в прототипе [6] инверсным кинематическим угломерно-разностно-доплеровским способом определяются (в режимах автосопровождения по УК и частоте) параметры движения одиночного РИО, перемещающегося в пространстве равномерно и прямолинейно на постоянной высоте.
К числу недостатков прототипа [6] следует отнести:
1. Невозможность измерения дальностей, направлений и скоростей перемещения в пространстве, а также траекторий РИО в случаях их движения с переменной высотой полета, то есть с произвольными углами пикирования (кабрирования).
2. Необходимость использования двух алгоритмов функционирования с ограниченной областью применимости каждого из них:
- первого, применимого в случае изменений азимута и угла места РИО при его приближении (удалении) относительно РЛС,
- второго, применимого только при постоянном азимуте объекта.
3. Использование следящего режима работы РЛС, что, по сравнению с обзорным режимом, снижает ее производительность и число контролируемых объектов.
Изобретений, решающих упомянутые проблемы путем пассивной однопозиционной локации перемещающегося в пространстве РИО, авторы заявляемого способа в технической литературе не обнаружили.
Задачей, на решение которой направлен предлагаемый способ, является определение координат, направлений и скоростей движения, а также построение траекторий всей совокупности РИО, движущихся в пространстве в пределах контролируемого сектора по произвольным направлениям равномерно и прямолинейно со всеми возможными курсовыми углами и углами пикирования (кабрирования).
Для решения этой задачи предлагается способ обзорной пассивной однопозиционной моноимпульсной трехкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов, при котором:
- используют цифровую антенную решетку или антенную решетку с цифровой обработкой сигналов, формируют в пространстве, применяя на раскрыве антенной решетки весовую функцию Хэмминга, моноимпульсную группу лучей с общим фазовым центром и пеленгационные характеристики с рабочими зонами ΔβПХ по азимуту и ΔεПХ по углу места, линейные на всей ширине моноимпульсной группы лучей за счет специально выбранных углов смещения лучей βсм и εсм;
- разбивают заданную область обзора пространства (телесный угол) на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равно-сигнальное направление моноимпульсной группы лучей в центры этих участков, осуществляют обзор упомянутой области;
- принимают сигналы РИО в течение интервала наблюдения на каждом участке разбиения, анализируют заданный диапазон частот, при наличии сигналов радиоизлучающих объектов констатируют обнаружение всей совокупности
- измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов угловых координат, вычисляемых относительно равносигнальных направлений путем решения линейных уравнений

и
где


- селектируют, используя данные об измеренных параметрах и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения;
- сглаживают значения измеренных угловых координат каждого объекта, представляя их в виде усредненных зависимостей


- формируют для приема сигналов избранных объектов дополнительно N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об УК сопровождаемых РИО;
- параллельно принимают и обрабатывают сигналы РИО по N лучам, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей
- интерполируют усредненные угловые зависимости

Согласно изобретению, в заявленном способе:
- построение траектории движения каждого объекта производят на вспомогательной наклонной плоскости 0А1АК, проходящей через прямолинейный участок траектории в пространстве (точки A1…AК) и лежащую вне траектории точку наблюдения;
- вычисляют на упомянутой плоскости, для произвольно выбранных точек участка траектории, обозначенных как A1, A2, … Ak, где

где
Δβk,1=(βk-β1)⋅cos[min(εk,ε1)];
Δεk,1=εk-ε1;
βk=β(tk);
εk=ε(tk),
- извлекают из зависимости ƒH(t) объекта значения ƒHk в моменты времени t1, t2, …, tk, вследствие эффекта Доплера равные

где ƒH0 - значение несущей частоты сигнала наблюдаемого объекта;
ƒДk - доплеровский сдвиг несущей частоты;
V - скорость радиоизлучающего объекта;
γk - курсовой угол объекта в момент времени tk;
λ - длина волны сигнала объекта,
и определяют их приращения на интервалах Δt2,1 и Δt3,1 как


- вычисляют величину отношения приращений несущей
а затем, вводя обозначение
получают уравнение относительно курсового угла γ1, решая которое, определяют курсовой угол наблюдаемого объекта на вспомогательной плоскости как
и вычисляют значение модуля вектора скорости объекта
где с=299792458 м/с - скорость распространения электромагнитных волн,
- определяют расстояние, пройденное РИО за интервал времени Δt3,1 под углом c3,1, как
S3,1=VΔt3,1,
- определяют наклонные дальности до точек А3 и А1 как

- аналогично определяют углы и расстояния для последующих точек Ak (при k>3) начального участка кусочно-линейной аппроксимации траектории объекта, а также наклонную дальность
- вычисляют величину модуля разности дальностей
значения γ1, V, Dk для построения траектории движения радиоизлучающего объекта на участке А1-АК, а для случая
принимают решение о начале маневра объекта и для дальнейшего построения его траектории на следующем участке кусочно-линейной аппроксимации повторяют аналогичные расчеты.
Техническим результатом предлагаемого изобретения является возможность однопозиционного измерения по единому алгоритму направлений и скоростей движения РИО, перемещающихся в пространстве в произвольных направлениях и с переменной высотой полета, а также построение траекторий совокупности РИО, движущихся в пределах контролируемого сектора со всеми возможными курсовыми углами и углами пикирования (кабрирования).
Предлагаемое изобретение не известно в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с признаками, отличающими заявляемое решение от прототипа, а также имеющих свойства, совпадающие со свойствами заявляемого решения, поэтому можно считать, что оно обладает существенными отличиями, вытекает из них неочевидным образом и, следовательно, соответствует критериям «новизна» и «изобретательский уровень».
Сущность изобретения поясняется следующими чертежами:
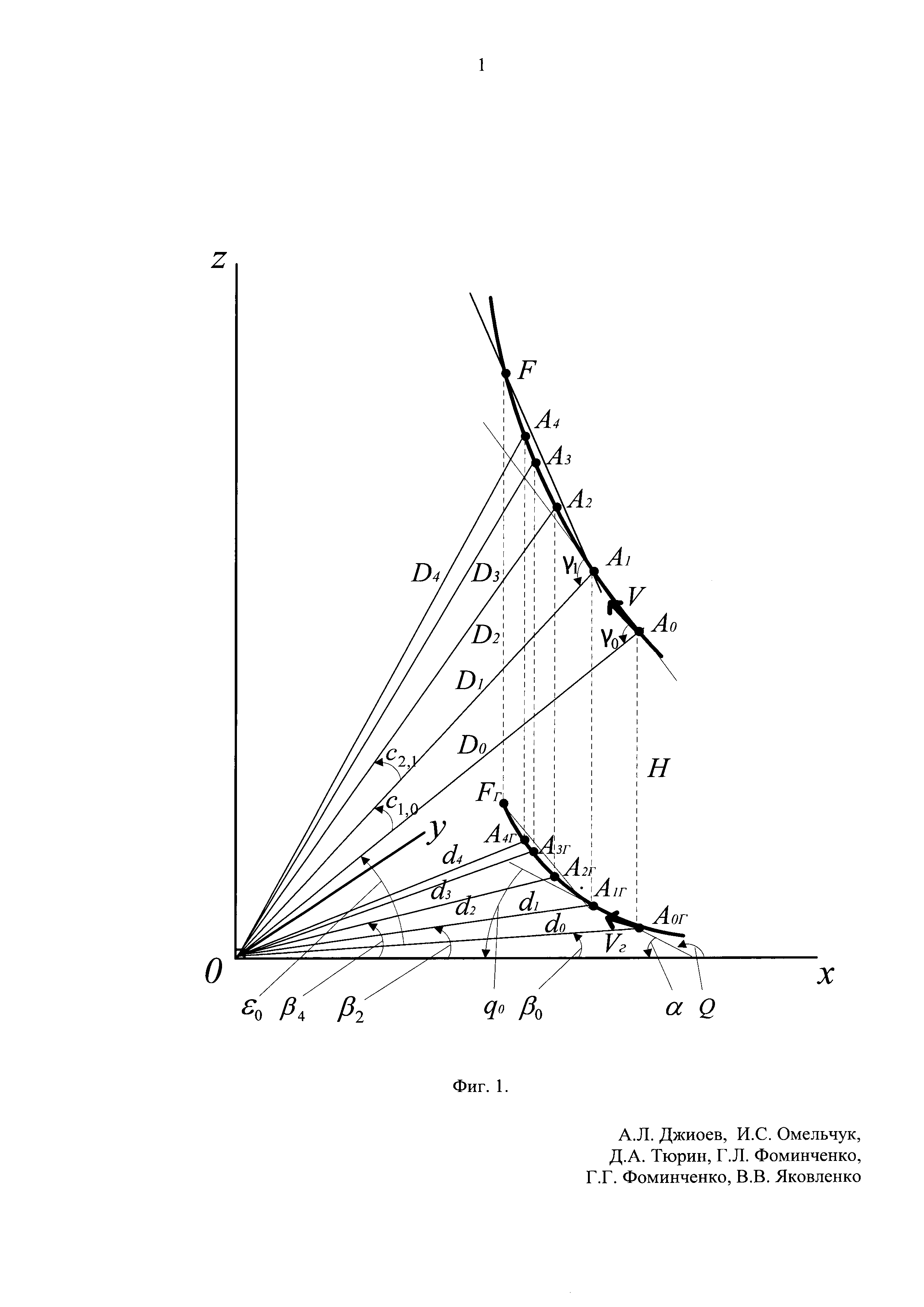
фигура 1 - траектория объекта и ее проекция на горизонтальную плоскость х0у в декартовой системе координат;
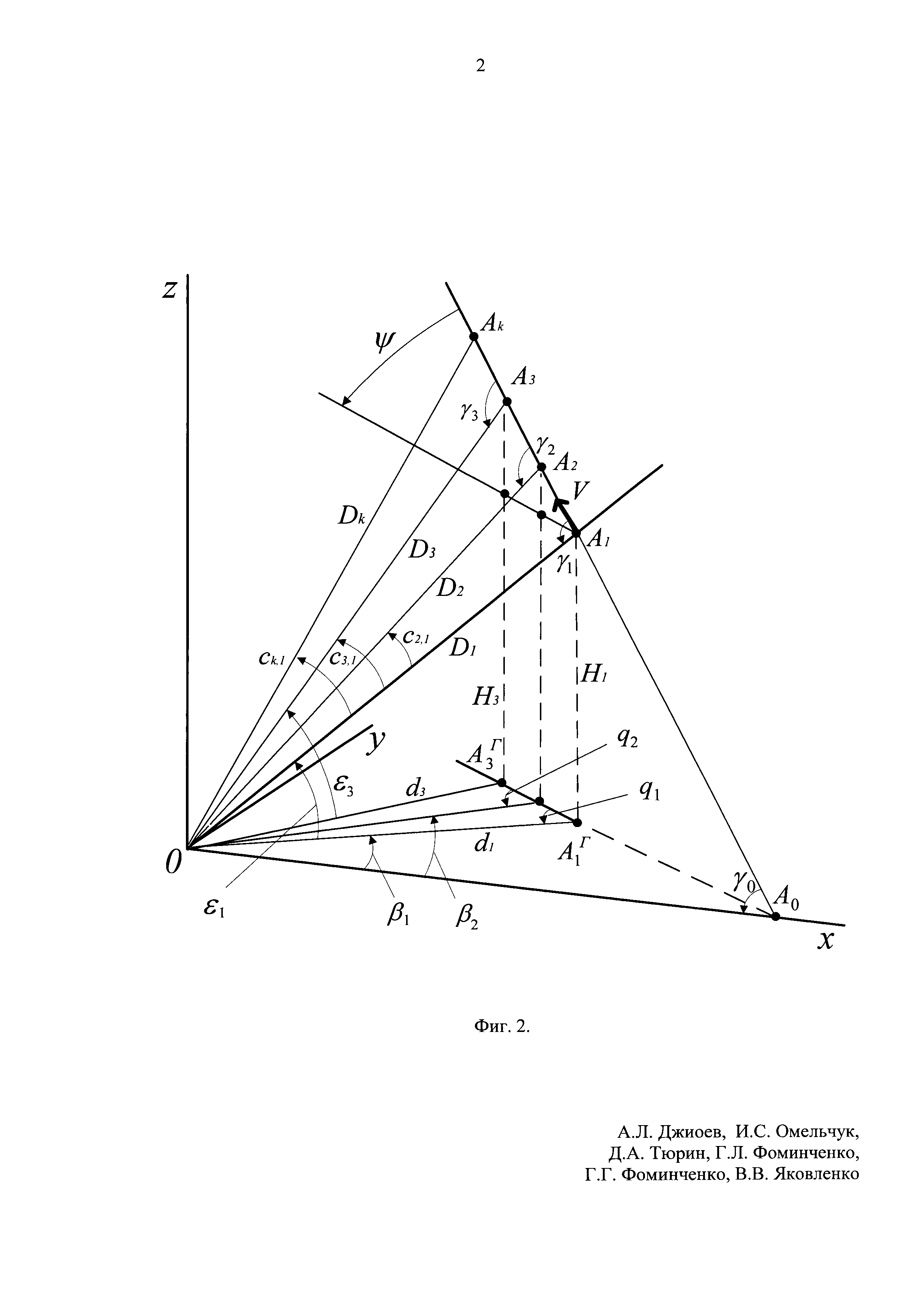
фигура 2 - геометрии задачи в сферической системе координат с использованием наклонной плоскости;
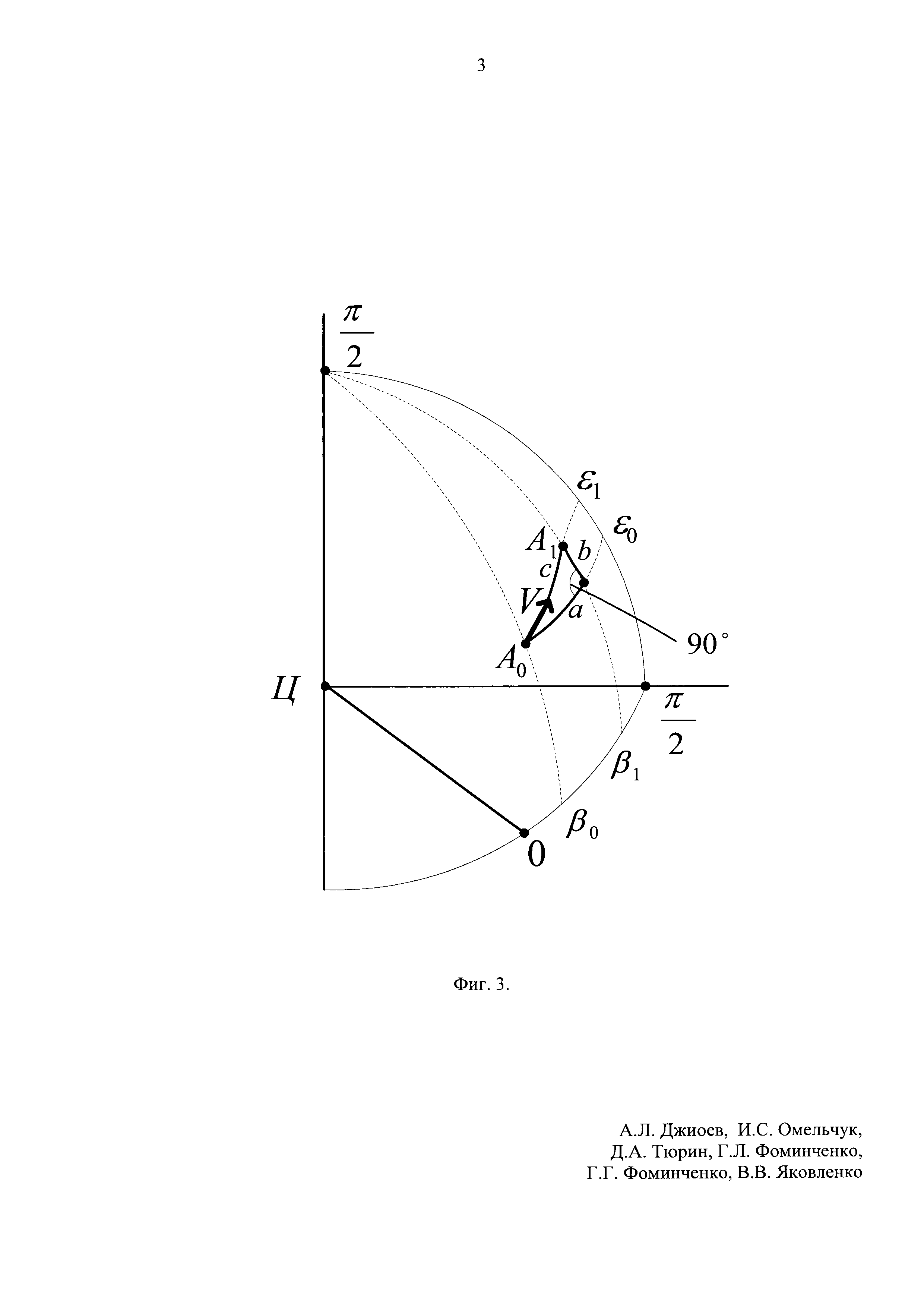
фигура 3 - сферический прямоугольный треугольник на небесной сфере;
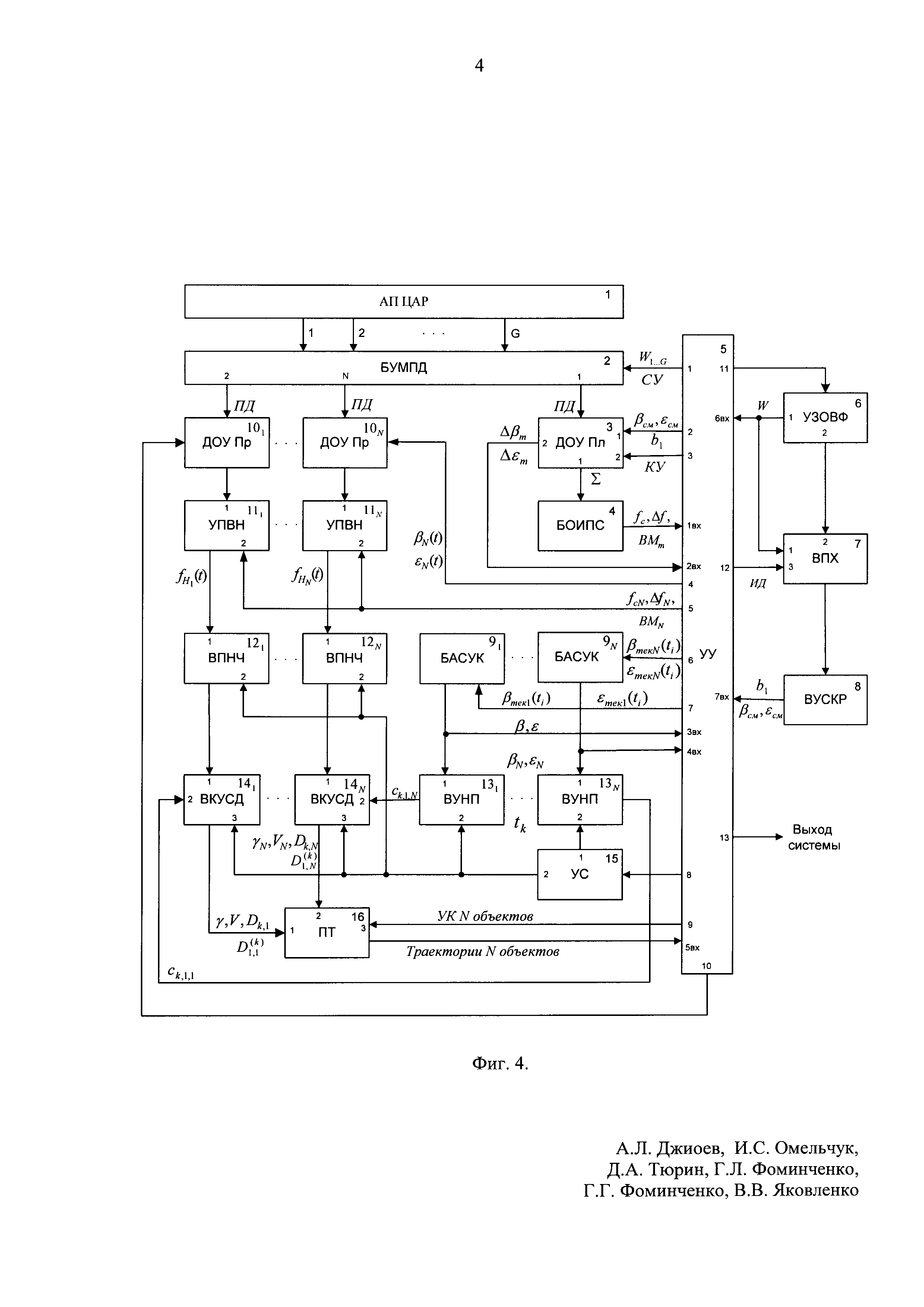
фигура 4 - схема электрической структурной системы, реализующей предложенный способ.
При реализации предложенного способа выполняется следующая последовательность операций.
1. Используют цифровую антенную решетку (ЦАР) или антенную решетку с цифровой обработкой сигналов, в каналы антенного полотна (АП) которой входят антенные элементы, малошумящие усилители (МШУ) и АЦП. Формируют в заданной области пространства, применяя на раскрыве антенной решетки весовую функцию W(x, у) Хэмминга, моноимпульсную группу лучей с общим фазовым центром, смещенных на оптимальные углы


2. Разбивают заданную область обзора пространства (телесный угол) на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая РСН моноимпульсной группы лучей в центры этих участков, осуществляют обзор упомянутой области.
3. Принимают сигналы РИО в течение интервала наблюдения на каждом участке разбиения (фиг. 1), где объект движется равномерно и прямолинейно (в случае движения РИО по криволинейной траектории осуществляют, как представлено на фиг. 1, ее кусочно-линейную аппроксимацию), анализируют заданный диапазон частот, при наличии сигналов РИО констатируют обнаружение всей совокупности

4. Измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов угловых координат, вычисляемых относительно равносигнальных направлений путем решения линейных уравнений
и
где


5. Селектируют, используя данные об измеренных параметрах и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения.
6. Сглаживают значения измеренных УК каждого объекта с помощью фильтров автосопровождения, представляя их в виде усредненных зависимостей

7. Формируют для приема сигналов избранных объектов дополнительно N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об УК сопровождаемых РИО.
8. Параллельно принимают и обрабатывают сигналы РИО по N лучам, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей
9. Интерполируют усредненные угловые зависимости
10. Построение траектории движения каждого объекта производят на вспомогательной наклонной плоскости 0А1АК, проходящей через прямолинейный участок траектории в пространстве (точки А1…АК) и лежащую вне траектории точку наблюдения. Считают, что положение РИО в сферической системе координат (фиг. 2) определяется текущими значениями:
- наклонной дальности Dk, проекцией которой на горизонтальную плоскость является горизонтальная дальность dk;
- азимута βk, отсчитываемого против часовой стрелки (при наблюдении сверху) от основного направления, совпадающего с направлением оси 0х, до линии горизонтальной дальности dk;
- угла места εk между наклонной и горизонтальной дальностями;
- пространственного курсового угла γk, отсчитываемого на наклонной плоскости A00Ak против часовой стрелки от вектора скорости до наклонной дальности Dk;
- угла Ψ пикирования (кабрирования) между вектором скорости V и ее горизонтальной проекцией VГ.
11. Вычисляют на упомянутой наклонной плоскости, для произвольно выбранных точек участка траектории, обозначенных как А1, А2, … Ak, где

где
Δβk,1=(βk-β1)⋅cos[min(εk, ε1)];
Δεk,1=εk-ε1;
βk=β(tk);
εk=ε(tk);
12. Извлекают из зависимости ƒH(t) объекта значения ƒHk в моменты времени t1, t2, … tk, равные вследствие эффекта Доплера

где ƒH0 - значение несущей частоты сигнала наблюдаемого объекта;
ƒДk - доплеровский сдвиг несущей частоты;
V - скорость радиоизлучающего объекта;
γk - курсовой угол объекта в момент времени tk;
λ - длина волны сигнала объекта,
и определяют их приращения на интервалах Δt2,1 и Δt3,1 как

13. Вычисляют величину отношения приращений несущей

а затем, вводя обозначение
получают уравнение относительно курсового угла γ1, решая которое, определяют курсовой угол наблюдаемого объекта на вспомогательной плоскости как

и вычисляют значение модуля вектора скорости объекта

где с=299792458 м/с - скорость распространения электромагнитных волн.
14. Определяют расстояние, пройденное РИО за интервал времени Δt3,1 под углом с3,1, как

15. Определяют наклонные дальности до точек А3 и А1 как


16. Аналогично определяют углы и расстояния для последующих точек Ak (при k>3) начального участка кусочно-линейной аппроксимации траектории объекта, а также наклонную дальность

17. Вычисляют величину модуля разности дальностей

значения γ1, V, Dk для построения траектории движения РИО на участке А1-АК, а для случая

констатируют начало маневра объекта и для дальнейшего построения его траектории на следующем участке кусочно-линейной аппроксимации повторяют аналогичные расчеты по формулам (1)-(13).
После этого осуществляют построение траектории РИО в пространстве на всем интервале наблюдения, используя измеренные и рассчитанные значения УК, дальности, скорости и курсовых углов, при необходимости осуществляя пересчет координат в цилиндрическую или декартовую систему.
Примером реализации предложенного способа является обзорная пассивная однопозиционная моноимпульсная трехкоординатная угломерно-разностно-доплеровская РЛС, структурная схема которой приведена на фиг. 4, где приняты следующие обозначения:
1 - антенное полотно цифровой антенной решетки (АП ЦАР), каналы которого содержат антенные элементы, МШУ и АЦП;
2 - блок умножителей и маршрутизатор потока данных (БУМПД);
3 - диаграммообразующее устройство пеленгатора (ДОУ Пл);
4 - блок обнаружения и измерения параметров сигналов (БОИПС);
5 - устройство управления (УУ);
6 - устройство запоминания отсчетов весовой функции (УЗОВФ);
7 - вычислитель пеленгационной характеристики (ВПХ);
8 - вычислитель оптимального угла смещения максимумов ДН МГЛ от РСН и коэффициентов разложения функции, описывающей ПХ (ВУСКР);
91, …, 9N - блоки автосопровождения по угловым координатам (БАСУК);
101, …, 10N - диаграммообразующие устройства каналов приема сигналов (ДОУ Пр);
111, …, 11N - устройства приема и восстановления несущих частот (УПВН);
121, …, 12N - вычислители приращений несущих частот (ВПНЧ);
131, …, 13N - вычислители углов на наклонных плоскостях (ВУНП);
141, …, 14N - вычислители курсовых углов, скоростей и наклонных дальностей (ВКУСД);
15 - устройство синхронизации (УС);
16 - построитель траекторий (ПТ) РИО.
Использованы сокращения: СУ - сигналы управления, КУ - команды управления МГЛ, ВМ - вид модуляции, ИД - исходные данные, УК - угловые координаты.
Обзорная пассивная однопозиционная моноимпульсная трехкоординатная угломерно-разностно-доплеровская РЛС содержит (фиг. 4) антенное полотно цифровой антенной решетки АП ЦАР 1, в которое входят антенные элементы, МШУ и АЦП, и последовательно соединенный с ним линиями 1…G блок умножителей и маршрутизатор потока данных БУМПД 2. Первый выход БУМПД 2 подключен ко входу потока данных (ПД) диаграммообразующего устройства пеленгатора ДОУ Пл 3, первый (суммарный) выход которого соединен со входом БОИПС 4, выход которого подключен к первому входу УУ 5, к шестому входу которого подключен первый выход УЗОВФ 6, подключенный также к первому входу ВПХ 7. Второй выход УЗОВФ 6 соединен со вторым входом ВПХ 7, выход которого соединен со входом ВУСКР 8, а выход ВУСКР 8 подключен к седьмому входу УУ 5. Второй выход ДОУ Пл 3 (разностный) соединен со вторым входом УУ 5, шестой и седьмой выходы которого подключены ко входам соответственно БАСУК 9N и БАСУК 91.
Второй…N-й выходы БУМПД 2 подключены ко входам ПД соответственно ДОУ Пр 101 и ДОУ Пр 10N, выходы которых соединены с первыми входами УПВН 111 и УПВН 11N.
Первый выход УУ 5 соединен с отдельным управляющим входом БУМПД 2, а второй и третий выходы УУ 5 - соответственно с первым и вторым отдельными входами ДОУ Пл 3. Четвертый выход УУ 5 подключен к отдельному входу ДОУ Пр 10N, а десятый выход УУ 5 - к отдельному входу ДОУ Пр 101, причем выходы ДОУ Пр 101 и ДОУ Пр 10N соединены с первыми входами соответственно УПВН 111 и УПВН 11N, ко вторым входам которых подключен пятый выход УУ 5.
В состав РЛС вновь введены блоки ВПНЧ 121 … ВПНЧ 12N, ВУНП 131 … ВУНП 13NВКУСД 141 … ВКУСД 14N, УС 15 и ПТ 16. При этом к первым входам ВПНЧ 121 и ВПНЧ 12N подключены выходы соответственно УПВН 111 и УПВН 11N, а ко вторым входам ВПНЧ 121 и ВПНЧ 12N подключен второй выход УС 15. Выход БАСУК 91 подключен к первому входу ВУНП 131 и третьему входу УУ 5, а выход БАСУК 9N - к первому входу ВУНП 13N и четвертому входу УУ 5. Выходы ВПНЧ 121 и ВПНЧ 12N подключены к первым входам соответственно ВКУСД 141 и ВКУСД 14N, ко второму входу ВКУСД 141 подключен выход ВУНП 13N, а ко второму входу ВКУСД 14N - выход ВУНП 131. Восьмой выход УУ 5 соединен со входом УС 15, первый выход которого подключен ко второму входу ВУНП 13N, а второй выход УС 15 - дополнительно ко второму входу ВУНП 131 и к третьим входам ВКУСД 141 и ВКУСД 14N.
Выходы ВКУСД 141 и ВКУСД 14N подключены соответственно к первому и второму входам ПТ 16, к третьему входу которого подключен девятый выход УУ 5. Выход ПТ 16 подключен к пятому входу УУ 5, одиннадцатый выход которого соединен со входом УЗОВФ 6, а двенадцатый выход - с третьим входом ВПХ 7. Тринадцатый выход УУ 5 является выходом системы.
РЛС работает следующим образом. После включения электропитания антенные элементы цифровой антенной решетки из состава АП ЦАР 1 принимают радиосигналы РИО, приходящие из заданной области обзора пространства (телесного угла), которые далее усиливаются, преобразуются на промежуточную частоту и подвергаются аналого-цифровому преобразованию. С выходов АП ЦАР 1 отсчеты смеси сигналов РИО и шумов поступают на входы блока умножителей и маршрутизатор потока данных БУМПД 2, где осуществляется их весовая обработка путем умножения на отсчеты функции W(x,y) Хэмминга, которые поступают в БУМПД 2 с первого выхода устройства управления УУ 5. Эти отсчеты извлекаются из устройства запоминания отсчетов весовой функции УЗОВФ 6 (выход 1) по команде, поступающей в УЗОВФ 6 из устройства УУ 5 (выход 11).
С выходов шины БУМПД 2 потоки данных поступают на диаграммообразующее устройство пеленгатора ДОУ Пл 3 и на диаграммообразующие устройства каналов приема сигналов ДОУ Пр 101 … ДОУ Пр 10N. В ДОУ Пл 3 формируют моноимпульсную группу лучей с общим фазовым центром, состоящую из двух пар смещенных на углы βсм и εсм парциальных лучей в азимутальной и угломестной плоскостях и суммарного луча. Углы βсм и εсм определяются путем предварительного моделирования процесса приема и обработки сигналов амплитудного суммарно-разностного пеленгатора, с использованием задаваемых параметров ЦАР, в вычислителях ВПХ 7 и ВУСКР 8, откуда они поступают на седьмой вход УУ 5. После этого в вычислителях ВПХ 7 и ВУСКР 8 производится расчет рабочих зон ΔβПХ по азимуту и ΔεПХ по углу места, в пределах которых обеспечивается линейность пеленгационных характеристик с ошибкой, не превышающей 0,01 ширины ДН по уровню половинной мощности, и коэффициентов
Далее в устройстве управления УУ 5 формируются сигналы управления СУ и наборы фазовых распределений W, использование которых позволяет с помощью ДОУ Пл 3 осуществить обзор заданной области пространства за счет последовательной установки РСН МГЛ в центры рабочих зон ΔβПХ и ΔεПХ. В процессе обзора принимают сигналы РИО по суммарному каналу, и в БОИПС 4 производят спектральный анализ заданного диапазона частот, обнаружение всей совокупности М сигналов РИО и измерение в течение интервала наблюдения на каждом участке разбиения их параметров: значений средних частот спектра, ширины спектров и видов модуляции сигналов. В ДОУ Пл 3 для каждого из обнаруженных сигналов осуществляют определение значений отсчетов относительно РСН угловых координат Δβm и Δεm путем решения линейных уравнений
и
где


Полученные данные передают в УУ 5, где на их основе селектируют N объектов (из совокупности М), избранных для автосопровождения, и вычисляют значения их УК в виде сумм
βтек n(ti)=βРСН n+Δβn,
εтек n(ti)=εPCH n+Δεn,
где
Полученные значения угловых координат сглаживаются в блоках автосопровождения по угловым координатам БАСУК 91 и БАСУК 9N, а затем вновь поступают в УУ 5, где по их усредненным значениям

Далее, считая движение сопровождаемых объектов на интервале времени Δtk,1=tk-t1 равномерно-прямолинейным со всеми возможными курсовыми углами и углами пикирования (кабрирования), для каждого РИО в вычислителях углов на наклонных плоскостях ВУНП 131 … ВУНП 13N определяются, под управлением устройства синхронизации УС 15, с использованием формулы (1), углы ck,1, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβk,1 и Δεk,1 и равен угловому размеру проекции на небесную сферу пути объекта за время Δtk,1=tk-t1, а в вычислителях приращений несущих частот ВПНЧ 121 … ВПНЧ 12N - значения на тех же интервалах времени приращений несущих ΔƒHk,1 по формуле (3), обусловленные эффектом Доплера.
Результаты расчетов величин углов ck,1 и приращений несущих ΔƒHk,1 поступают в вычислители курсовых углов, скоростей и наклонных дальностей ВКУСД 141 … ВКУСД 14N, в которых осуществляются в соответствии с формулами (4), (6-10) расчеты курсовых углов γ1,1, γ1,N, модулей векторов скорости V1,N объектов и наклонных дальностей D1,1, D1,N-Dk,1, Dk,N.
Значения углов γ1,N, скоростей V1,N и текущих дальностей Dk,N, а также значения угловых координат βN(t), εN(t) используются в построителе траекторий ПТ 16 для отображения траекторий движения РИО в пространстве на участках ее кусочно-линейной аппроксимации.
Одновременно с расчетами текущих значений дальностей Dk,N в ВКУСД 141 … ВКУСД 14N производится расчет по формуле (11) наклонной дальности до начальной точки участка аппроксимации
В построителе траекторий ПТ 16 вычисляются величины модулей разностей дальностей
В процессе сеанса наблюдения осуществляется построение траекторий РИО в пространстве в течение всего времени наблюдения их сигналов и выдача данных потребителям о параметрах сигналов и параметрах движения РИО.
Для оценки точностных характеристик предложенного способа в зависимости от точностей измерений совокупности первичных параметров сигналов РИО и параметров движения объектов (несущих частот и их доплеровских приращений, УК и их приращений, времени) в Ростовском-на-Дону НИИ радиосвязи проведено математическое моделирование процессов, обеспечивающих достижение конечного результата. Этим результатом является измерение направлений и скоростей РИО, а также их наклонных дальностей и траекторий движения предложенным способом обзорной пассивной однопозиционной моноимпульсной трехкоординатной угломерно-разностно-доплеровской локации. При этом предполагалось, что:
- объекты движутся в контролируемой области пространства по произвольным направлениям равномерно и прямолинейно (в случае движения РИО по криволинейным траекториям осуществляется их кусочно-линейная аппроксимация) с любыми курсовыми углами и углами пикирования (кабрирования);
- энергии излучаемых РИО сигналов достаточно для решения задач обнаружения и измерения их параметров, а также УК объектов с малыми ошибками;
- пересчет параметров движения РИО в угловые координаты на наклонной плоскости и обратно не вносит дополнительных ошибок;
- оценка точности способа производится на основе статистического анализа ансамбля траекторий, совпадающих с прямолинейной траекторией, но в каждой точке мгновенные курсы и скорости, определяющие значения сдвигов несущих частот, распределены по нормальному закону.
В процессе моделирования сначала производился расчет точных (модельных) значений параметров движения РИО в сферической системе координат. Затем рассчитывались параметры движения объекта по формулам предложенного способа, производилось их усреднение по ансамблю траекторий и определялись среднеквадратические значения ошибок измерений курсовых углов, скорости и наклонных дальностей до объекта путем сравнения их модельных и рассчитанных значений.
В результате моделирования установлено, что при ошибках измерения:
- угловых координат, равных 2 угловым минутам,
- частоты, равных 1,0 Гц,
- времени, равных 10-6 с,
относительные величины ошибок измерений курсового угла γ, скорости движения V и наклонной дальности D соответственно равны
Предложенный способ локации и реализующая его однопозиционная пассивная РЛС надежно функционируют в условиях приема флюктуирующих сигналов при достаточном отношении сигнал/шум (порядка 12-15 дБ), так как флюктуации влияют лишь на характеристики обнаружения и точность измерения энергетических параметров.
Реализация способа и устройства на его основе не встречает затруднений при современном уровне развития радиотехники и устройств цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость».
Таким образом, использование предложенного способа обеспечивает, по сравнению с прототипом, следующие технико-экономические эффекты:
- обеспечена возможность измерения по единому алгоритму направлений движения, скоростей и траекторий РИО, перемещающихся в пространстве в произвольных направлениях с переменной высотой полета;
- достигнута возможность селекции объектов по совокупности параметров «скорость - угловые координаты»;
- обеспечена работоспособность способа и устройства при приеме сложных частотно-фазо-модулированных сигналов;
- при ошибках измерения УК, равных 2 угловым минутам, и частоты, равных 1,0 Гц, а также времени, равных 10-6 с, относительные величины ошибок измерений курсового угла γ, скорости движения V и наклонной дальности D составляют
Реферат
Изобретение относится к области радиотехники и может использоваться в системах обзорной пассивной радиолокации и радиотехнического наблюдения для однопозиционного высокоточного определения скоростей, координат и траекторий перемещающихся в пространстве радиоизлучающих объектов (РИО). Достигаемый технический результат - возможность измерения по единому алгоритму направлений и скоростей движения РИО, перемещающихся в пространстве в произвольных направлениях и с переменной высотой полета, а также построение их траекторий. Для достижения технического результата построение траектории движения каждого объекта производят на вспомогательной наклонной плоскости, проходящей через прямолинейный участок траектории в пространстве и лежащую вне траектории точку наблюдения, причем на этой плоскости вычисляют, как указано в заявке, углы c, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβи Δε, лежащими на линиях координат азимута и угла места, и равен угловому размеру проекции на небесную сферу пути объекта за время Δt=t-t. На соседних участках траектории вычисляют величину отношения приращений несущей с учетом эффекта Доплера и определяют курсовой угол РИО на вспомогательной плоскости, а затем вычисляют значение модуля вектора скорости объекта, расстояние, пройденное РИО за интервал времени Δtпод углом с, и наклонные дальности до точек Аи A, затем определяют углы и расстояния для последующих точек A, при k>3, а также наклонную дальностьдо точки Ас использованием величин Sи cдля обнаружения начала маневра РИО, а для дальнейшего построения его траектории на следующем участке кусочно-линейной аппроксимации повторяют аналогичные расчеты. 4 ил.
Формула










Комментарии