Устройство обнаружения данных для использования в комбинации с устройством mri - RU2605525C2
Код документа: RU2605525C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству обнаружения данных для использования в комбинации с устройством магнитно-резонансной томографии (MRI), а также к соответствующему способу обнаружения данных и компьютерной программе обнаружения данных. Кроме того, изобретение имеет отношение к устройству формирования изображений, а также соответствующему способу формирования изображений и компьютерной программе формирования изображений.
УРОВЕНЬ ТЕХНИКИ
В последние годы имелась тенденция к комбинации различных медицинских методов обработки изображений для улучшения диагностики. Например, интеграция биохимического или метаболического формирования изображений, обеспеченного посредством позитронно-эмиссионной томографии (PET), и анатомического формирования изображений, обеспеченного посредством компьютерной томографии (CT), зарекомендовала себя как стандартный клинический инструмент. Однако использование СТ в комбинации с PET имеет свои ограничения, такие как заметная доза облучения (рентгеновские лучи) и уменьшенный контраст мягкой ткани по сравнению с магнитно-резонансной томографией (MRI). Поэтому MRI рассматривается теперь как улучшенная альтернатива СТ. Кроме того, комбинация PET и MRI имеет потенциал, чтобы предложить действительно одновременный сбор данных PET и MRI. Это дает возможность одновременных динамических исследований различных параметров, таких как диффузия и перфузия, для получения новой диагностической информации. Кроме того, это также дает возможность усовершенствованного воссоздания изображения PET, например, посредством корректировки собранных данных PET для эффектов движений пациента, поскольку общее и локальное движение тела может быть эффективно отслежено посредством MRI. Однако, чтобы извлечь выгоду из комбинации двух различных медицинских методов обработки изображений, таких как PET и MRI, требуется иметь возможность соотнесения во времени друг с другом собранных данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В качестве задачи настоящего изобретения рассматривается обеспечение устройства обнаружения данных для использования в комбинации с устройством магнитно-резонансной томографии (MRI), которое позволяет определять временное отношение с полученными данными MRI, а также соответствующий способ обнаружения данных и компьютерную программу обнаружения данных. В качестве дополнительной задачи настоящего изобретения рассматривается обеспечение устройства формирования изображений, а также соответствующего способа формирования изображений и компьютерной программы формирования изображений.
В первом аспекте настоящего изобретения представлено устройство обнаружения данных для использования в комбинации с магнитно-резонансной томографией (MRI), причем устройство обнаружения данных содержит:
блок обнаружения магнитного поля для обнаружения переменного во времени магнитного поля, сформированного устройством MRI, и
блок формирования меток времени для формирования меток времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля.
Как будет описано более подробно со ссылкой на варианты осуществления, магнитно-резонансная томография (MRI) основана на использовании трех видов магнитных полей с абсолютно различными частотами: (i) сильного однородного статического магнитного поля B0; (ii) переключаемых градиентов магнитного поля низких частот (которые обычно варьируют в диапазоне кГц), и; (iii) импульсного радиочастотного магнитного поля B1 (с типичной частотой в диапазоне приблизительно 100 МГц). Временные изменения двух последних магнитных полей по своей природе обеспечивают информацию о моментах времени, в которые устройство MRI собирает данные MRI (в дальнейшем также называемые "синхронизацией сбора данных MRI"). Посредством обнаружения такого переменного во времени магнитного поля, сформированного устройством MRI, и формирования меток времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля устройство обнаружения данных может относительно простым образом и в частности без необходимости специализированного интерфейса между устройством обнаружения данных и устройством MRI определять временное отношение с собранными данными MRI.
Предпочтительно блок обнаружения магнитного поля содержит, по меньшей мере, одну катушку для обеспечения электрических токов, индуцированных временными изменениями переменного во времени магнитного поля, и блок обеспечения сигналов для обеспечения сигналов в зависимости от обеспеченных электрических токов, причем блок формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля в зависимости от обеспеченных сигналов.
С использованием принципа электромагнитной индукции может быть легко и эффективно обнаружено переменное во времени магнитное поле, сформированное устройством MRI. Это также требует добавления лишь немногих дополнительных электронных компонентов к устройству обнаружения данных, и поэтому обеспечивает сравнительно дешевое решение. Кроме того, поскольку устройство обнаружения данных и устройство MRI могут быть гальваническим образом разделены, такое решение также является особенно безопасным. Кроме того, поскольку обеспеченные электрические токи индуцируются посредством временных изменений переменного во времени магнитного поля и поскольку обнаруживается синхронизация сбора данных MRI, в частности, во временных изменениях переменного во времени магнитного поля, сформированные метки времени обнаружения магнитного поля могут обеспечить значимое временное отношение с полученными данными MRI.
В предпочтительном варианте осуществления блок обнаружения магнитного поля дополнительно содержит блок сравнения сигналов для сравнения обеспеченных сигналов с заданным порогом сигнала, причем блок формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля, когда обеспеченные сигналы пересекают заданный порог сигнала.
Посредством сравнения обеспеченных сигналов, которые зависят от обеспеченных электрических токов, индуцированных временными изменениями переменного во времени магнитного поля, с заданным порогом сигнала и посредством формирования меток времени обнаружения магнитного поля, когда обеспеченные сигналы пересекают заданный порог сигнала, временные изменения переменного во времени магнитного поля могут быть легко определены.
Предпочтительно блок обнаружения магнитного поля выполнен с возможностью предоставлять возможность корректировки чувствительности обнаружения переменного во времени магнитного поля.
Как будет описано более подробно со ссылкой на варианты осуществления, переменное во времени магнитное поле, сформированное устройством MRI, изменяется не только во времени, но также может изменяться в зависимости от позиции в пространстве. Поэтому для надежного обнаружения предпочтительно, чтобы чувствительность обнаружения переменного во времени магнитного поля могла быть адаптирована в соответствии с обстоятельствами, например, с позицией и/или ориентацией устройства обнаружения данных относительно переменного во времени магнитного поля. В предпочтительном варианте осуществления это может быть реализовано посредством блока сравнения сигналов, выполненного с возможностью предоставлять возможность корректировки заданного порога сигнала.
Также предпочтительно устройство обнаружения данных дополнительно содержит печатную плату (PCB), причем, по меньшей мере, одна катушка сделана в значительной степени из дорожек печатной платы или содержит катушку индуктивности без сердечника.
В частности, если, по меньшей мере, одна катушка выполнена в значительной степени из дорожек на печатной плате, по меньшей мере, одна катушка может быть изготовлена особенно дешевым и простым образом.
Предпочтительно блок обнаружения магнитного поля содержит три катушки, которые расположены перпендикулярно по отношению друг к другу.
Посредством использования информации, обеспеченной тремя перпендикулярно расположенными катушками, может быть определена позиция и/или ориентация устройства обнаружения данных относительно переменного во времени магнитного поля.
Также предпочтительно переменное во времени магнитное поле, которое должно быть обнаружено, является переключаемым градиентом магнитного поля, сформированным устройством MRI.
Предпочтительно устройство обнаружения данных дополнительно содержит радиочастотный экран для экранирования блока обнаружения магнитного поля от импульсного радиочастотного магнитного поля B1, сформированного устройством MRI.
Эта конфигурация гарантирует, что импульсное радиочастотное магнитное поле B1 не оказывает влияния или возмущения на блок обнаружения магнитного поля.
Также предпочтительно, что блок формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля в соответствии с базой единого времени, которая также используется для формирования меток времени данных для данных, обнаруженных посредством устройства обнаружения данных.
Предпочтительно устройство обнаружения данных представляет собой устройство обнаружения ядерных данных, в частности устройство обнаружения данных позитронно-эмиссионной томографии (PET) или устройство обнаружения данных однофотонной эмиссионной компьютерной томографии (SPECT).
В дополнительном аспекте настоящего изобретения представлено устройство формирования изображений, причем устройство формирования изображений содержит:
- устройство магнитно-резонансной томографии (MRI), и
- устройство обнаружения данных по п. 1 формулы изобретения.
В дополнительном аспекте настоящего изобретения представлен способ обнаружения данных для использования в комбинации со способом магнитно-резонансной томографии (MRI), причем способ обнаружения данных содержит этапы, на которых:
- обнаруживают переменное во времени магнитное поле, сформированное способом MRI, посредством блока обнаружения магнитного поля, и
- формируют метки времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля посредством блока формирования меток времени.
В дополнительном аспекте настоящего изобретения представлен способ формирования изображений, причем способ формирования изображений содержит:
- магнитно-резонансную томографию (MRI), и
- обнаружение данных по п. 12 формулы изобретения.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа обнаружения данных, причем компьютерная программа обнаружения данных содержит средство программного кода для того, чтобы побудить устройство обнаружения данных по п. 1 формулы изобретения выполнять этапы способа обнаружения данных по п. 12 формулы изобретения, когда компьютерная программа обнаружения данных выполняется на компьютере, который управляет устройством обнаружения данных.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа формирования изображений, причем компьютерная программа формирования изображений содержит средство программного кода для того, чтобы побудить устройство формирования изображений по п. 11 формулы изобретения выполнять этапы способа формирования изображений по п. 13 формулы изобретения, когда компьютерная программа формирования изображений выполняется на компьютере, который управляет устройством формирования изображений.
Следует понимать, что устройство обнаружения данных по п. 1, устройство формирования изображений по п. 11, способ обнаружения данных по п. 12, способ формирования изображений по п. 13, компьютерная программа обнаружения данных по п. 14 и компьютерная программа формирования изображений по п. 15 имеют аналогичные и/или идентичные предпочтительные варианты осуществления, в частности определенные в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения также может являться любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения будут понятны и освещены со ссылкой на описанные далее варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематично и иллюстративно показывает вариант осуществления устройства формирования изображений,
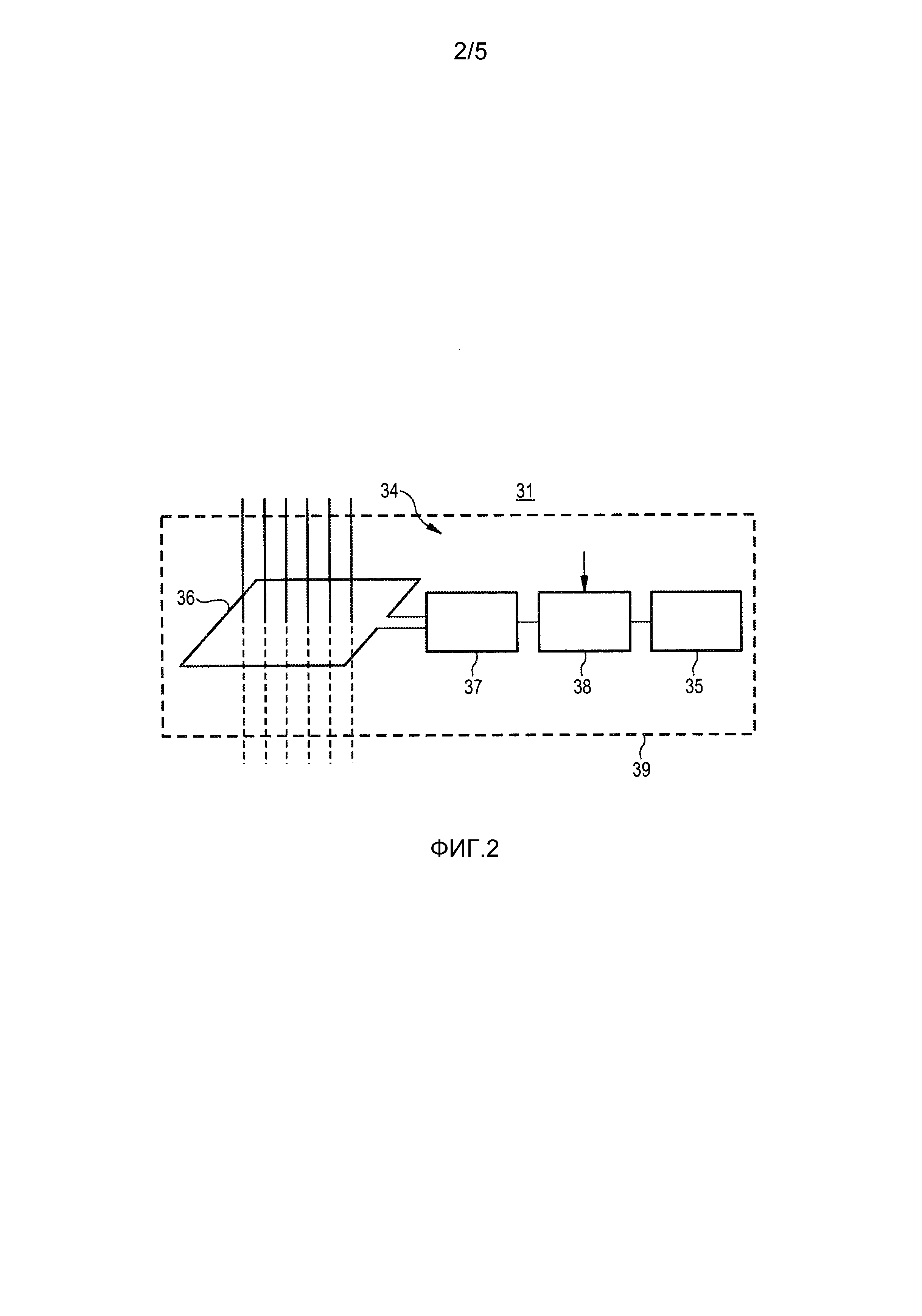
Фиг. 2 схематично и иллюстративно показывает компоненты устройства обнаружения данных PET,
Фиг. 3 схематично и иллюстративно показывает радиочастотное экранирование электроники устройства обнаружения данных PET,
Фиг. 4 схематично и иллюстративно показывает печатную плату (PCB), которую содержит устройство обнаружения данных PET, и
Фиг. 5 показывает блок-схему последовательности операций, иллюстрирующую вариант осуществления способа формирования изображений.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 схематично и иллюстративно показывает вариант осуществления устройства 10 формирования изображений, содержащего устройство 20 магнитно-резонансной томографии (MRI) и устройство 30 позитронно-эмиссионной томографии (PET). Устройство 10 формирования изображений способно собирать как данные MRI, так и данные PET, например, из пространственных областей участка 11 формирования изображения, которые, по меньшей мере, частично накладываются или являются пространственно смежными.
Устройство 20 MRI содержит основной магнит 21, который служит для формирования сильного однородного статического магнитного поля B0, проходящего через участок 11 формирования изображения (как принято, вдоль направления z). Основной магнит 21 может являться кольцевым магнитом или магнитом с цилиндрическим туннелем. Кроме того, основной магнит 21 может иметь сверхпроводящую или резистивную природу; в первом случае он обычно располагается в криогенном дюаре или в другой системе охлаждения (не показана). Устройство 20 MRI также содержит катушки 22 градиента магнитного поля, которые служат для наложения переключаемых градиентов магнитного поля в направлениях x, y и z на статическое магнитное поле B0. Кроме того, устройство 20 MRI содержит радиочастотную систему возбуждения и приема. Радиочастотная система возбуждения и приема включает в себя меньшей мере один компонент, такой как проиллюстрированная радиочастотная (RF) катушка 23, который может быть активизирован на подходящей радиочастоте для формирования импульсного радиочастотного магнитного поля B1, которое возбуждает магнитный резонанс (MR) в объекте 12 формирования изображения, например в человеке-пациенте, расположенном на столе 13, в участке 11 формирования изображения. Радиочастотная катушка 23 также может функционировать как радиочастотный приемник для приема или обнаружения сигналов MR, исходящих от участка 11 формирования изображения после радиочастотного возбуждения. В некоторых вариантах осуществления для операций возбуждения и приема используются разные катушки. Например, встроенная радиочастотная катушка 23 может использоваться для возбуждения магнитного резонанса, и другая локальная катушка или специализированная катушка (не показана) может быть расположена над объектом 12 формирования изображения, на нем или вблизи от него в участке 11 обработки изображений для обнаружения магнитного резонанса. Возможно, что устройство 20 MRI может быть по-разному сконфигурировано с использованием разных комбинаций встроенных катушек, локальных катушек или их вместе.
В магнитно-резонансной томографии спины ядер ткани объекта 12 построения изображения выравниваются статическим магнитным полем B0, сформированным основным магнитом 21, и возбуждаются импульсным радиочастотным магнитным полем B1, например, посредством радиочастотной катушки 23. Получающиеся в результате сигналы MR подвергаются воздействию переключаемых градиентов магнитного поля, сформированных катушками 22 градиента магнитного поля, для "пространственного кодирования" сигналов MR посредством создания специфической резонансной частоты в каждом местоположении в объекте 12 построения изображения. Относительный порядок и заданные временные изменения импульсного радиочастотного магнитного поля B1 переключаемых градиентов магнитного поля обычно могут быть выбраны в соответствии с потребностью из нескольких предопределенных "последовательностей импульсов MR", каждая из которых демонстрирует разные воздействия на характеристики получаемых в результате изображений MRI. Пространственно закодированные сигналы MRI, полученные, например, посредством радиочастотной катушки 23, временно сохраняются в устройстве хранения данных MRI (не показано) для более позднего использования, например, при воссоздании изображения MRI. С этой целью устройство 20 MRI содержит блок 24 воссоздания изображения MRI, который из данных MRI воссоздает изображение MRI с использованием алгоритма воссоздания изображения, который соответствующим образом выполнен с возможностью пространственного кодирования, используемого при получении данных MRI. Например, алгоритм воссоздания с преобразованием Фурье может соответствующим образом использоваться для воссоздания закодированных в декартовом пространстве данных MRI. Воссозданное изображение MRI соответствующим образом отображается в блоке 14 отображения, например, посредством подходящего способа двухмерного или трехмерного представления, или может быть обработано иным образом.
Устройство 30 PET содержит несколько устройств 31 обнаружения данных позитронно-эмиссионной томографии (PET), которые окружают участок 11 построения изображения. Здесь двенадцать устройств 31 обнаружения данных PET, проиллюстрированные как густо заштрихованные прямоугольники, расположены по кругу между катушками 22 градиента магнитного поля и радиочастотной катушкой 23. В некоторых вариантах осуществления устройства 31 обнаружения данных PET также могут быть расположены в соответствующих выемках в катушках 22 градиента магнитного поля, или они могут быть расположены иначе наиболее подходящим образом.
В позитронно-эмиссионной томографии к объекту 12 формирования изображения применяется радиоактивный медицинский препарат, в котором события радиоактивного распада радиоактивного медицинского препарата производят позитроны. Каждый позитрон взаимодействует с электроном, чтобы произвести событие позитронно-электронной аннигиляции, которое испускает два противоположно направленных гамма-луча с энергией 511 кэВ. Устройства 31 обнаружения данных PET выполнены с возможностью обнаруживать гамма-лучи с энергией 511 кэВ, которые испускаются посредством событий позитронно-электронной аннигиляции. Таким образом, предполагается, что два в значительной степени одновременных события обнаружения гамма-лучей с энергией 511 произошли вследствие одного и того же события позитронно-электронной аннигиляции, которое расположено где-либо на "линии отклика" (LOR), соединяющей два в значительной степени одновременных события обнаружения гамма-лучей с энергией 511 кэВ. Эту линию ответа иногда также называют проекцией или лучом, и полученные данные PET упоминаются как данные проекции.
Состав устройств 31 обнаружения данных PET подробно не показан на фиг. 1. Однако в варианте осуществления каждое из этих устройств может включать в себя пиксельный массив кристаллов сцинтилляции, оптически соединенный со световодом, который распространяет фотоны, испускаемые кристаллами сцинтилляции при падении гамма-лучей на массив элементов датчика. Каждый элемент датчика обычно включает в себя массив кремниевых фотоумножителей (SiPM), каждый из которых в свою очередь включает в себя массив лавинных фотодиодов (APD) режима счетчика Гейгера. Элементы датчика электронным образом соединены со специализированной интегральной схемой (ASIC), которая отвечает за преобразование в цифровую форму и предварительную обработку событий обнаружения фотонов. Схема может поддерживать такие функции, как идентификация пикселя, добавление метки времени, подсчет фотонов, цифровое смещение, цифровой триггерный запуск, считывание и другие функции, используемые в позитронно-эмиссионной томографии с информацией времени прохождения или глубины взаимодействия или без нее (см. ниже). Кристаллы сцинтиллятора выбираются для обеспечения высокой мощности торможения для падающего гамма-излучения с быстрым временным затуханием всплеска сцинтилляции. Некоторые подходящие материалы включают в себя LSO, LYSO, MLS, LGSO, LaBr, CsI(Ti) и их смеси. Однако следует отметить, что также могут использоваться другие материалы сцинтиллятора. Элементы датчика выбираются для обеспечения высокого коэффициента усиления, устойчивости, низкой стоимости и низкого рабочего напряжения. Подходящие элементы датчика включают в себя аналоговые и цифровые кремниевые фотоумножители (SiPM).
В традиционной позитронно-эмиссионной томографии в значительной степени одновременные события обнаружения гамма-лучей с энергией 511 кэВ определены как два события обнаружения гамма-лучей с энергией 511 кэВ, происходящие в пределах выбранного кратковременного окна, например в течение четырех наносекунд друг от друга. Это кратковременное окно учитывает, что любое событие позитронно-электронной аннигиляции, которое не происходит в центре участка 11 формирования изображения, приведет к небольшой разности во времени прибытия, пропорциональной времени прохождения двух испущенных гамма-лучей с энергией 511 кэВ, в противостоящих устройствах 31 обнаружения данных PET. Соответствующая методика, называемая позитронно-эмиссионной томографией с отслеживанием времени прохождения (TOF-PET), использует эту небольшую разность во времени, чтобы дополнительно локализовать событие позитронно-электронной аннигиляции вдоль линии ответа с точностью менее наносекунды. Другая соответствующая методика, называемая позитронно-эмиссионной томографией с отслеживанием глубины взаимодействия (DOI-PET), использует многослойные устройства обнаружения данных PET, чтобы иметь возможность определять глубину события сцинтилляции в пределах кристалла сцинтилляции.
Устройства 31 обнаружения данных PET из устройства 30 PET используются для сбора данных PET (в дальнейшем термин "данные PET" также может включать в себя данные TOF-PET и/или данные DOI-PET). Блок 32 обнаружения совпадения использует механизм временного окна для идентификации событий обнаружения гамма-лучей с энергией 511 кэВ, которые произошли в значительной степени одновременно и, таким образом, вероятно соответствуют одному и тому же событию позитронно-электронной аннигиляции, и, таким образом, задают линию проекции или линию отклика (LOR). Для обработки времени прохождения небольшая разность во времени между идентифицированными в значительной степени одновременными событиями обнаружения гамма-лучей с энергией 511 кэВ используется для пространственной оценки события позитронно-электронной аннигиляции вдоль линии ответа. Аналогичным образом, для обработки глубины взаимодействия извлекается необходимая информация глубины взаимодействия. Блок 33 воссоздания изображения PET затем воссоздает из данных PET воссозданное изображение PET с использованием подходящего алгоритма воссоздания изображения. Например, может использоваться алгоритм максимизации ожидания максимального правдоподобия (ML-EM), алгоритм фильтрованной обратной проекции (FB) или алгоритм итеративного воссоздания изображения, отличающийся от алгоритма ML-EM. Воссозданное изображение PET соответствующим образом отображено в блоке 14 отображения, например, посредством подходящего способа двухмерного или трехмерного представления, или может быть обработано иным образом.
В устройстве 10 формирования изображений этого варианта осуществления устройства 31 обнаружения данных PET не окружают непрерывно участок 11 формирования изображения. Такое неполное окружение может привести к артефактам формирования изображений вследствие "недостающих" проекций или линий ответа. Например, некоторые проекции могут быть пропущены, поскольку информация, обычно предоставляемая такими проекциями о соответствующих позициях, недоступна. Предпочтительно, если данные TOF-PET собраны и воспроизведены, то локализация с помощью времени прохождения обеспечивает дополнительную информацию, которая может использоваться для компенсации потерянной информации даже при наличии неполного окружения. Кроме того, другие методы компенсации неполного окружения известны специалистам в области техники при осуществлении заявленного изобретения. В других вариантах осуществления участок 11 формирования изображения также может быть непрерывно окружен устройствами 31 обнаружения данных PET, например посредством обеспечения большего количества этих устройств, посредством использования устройства, имеющего большую пространственную протяженность или посредством расположения устройств ближе к участку 11 формирования изображения.
Сбор данных MRI и PET может быть выполнен последовательно (например, сначала MRI, затем PET, или наоборот) или может быть чередован. Однако предпочтительно данные MRI и PET собираются одновременно. Это дает возможность одновременных динамических исследований различных параметров, таких как диффузия и перфузия, для получения новой диагностической информации. Кроме того, это также дает возможность усовершенствованного воссоздания изображения PET, например, посредством корректировки собранных данных PET для эффектов движения объекта 12 формирования изображения, например, пациента-человека, поскольку общее и локальное движение тела может быть эффективно отслежено посредством MRI. Однако, чтобы реализовать эти преимущества, должна иметься возможность соотнесения во времени данных, собранных посредством двух различных методов формирования изображений.
С этой целью, по меньшей мере, одно из устройств 31 обнаружения данных PET содержит блок обнаружения магнитного поля, который служит для обнаружения переменного во времени магнитного поля, которое сформировано устройством 20 MRI, и блок формирования меток времени, который формирует метки времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля (см. фиг. 2). Поскольку временные изменения переключаемых градиентов магнитного поля и импульсного радиочастотного магнитного поля B1 по своей природе обеспечивают информацию о времени, в которое устройство 20 MRI собирает данные MRI (то есть "синхронизацию сбора данных MRI"), для устройства 31 обнаружения данных PET посредством упомянутой выше конфигурации возможно относительно простым образом и, в частности, без необходимости специализированного интерфейса между устройством 31 обнаружения данных PET и устройством 20 MRI определять временное отношение с собранными данными MRI.
Подходящий блок 34 обнаружения магнитного поля и блок 35 формирования меток времени описаны более подробно со ссылкой на фиг. 2, которая схематично и иллюстративно показывает устройство 31 обнаружения данных PET, содержащее среди прочего эти два компонента.
Блок 34 обнаружения магнитного поля в этом варианте осуществления содержит катушку 36, которая служит для обеспечения электрических токов, которые индуцируются временными изменениями переменного во времени переменного магнитного поля. (Переменное во времени магнитное поле проиллюстрировано вертикальными линиями, которые проходят через катушку 36.) Как описано выше, переменное во времени магнитное поле, которое должно быть обнаружено блоком 34 обнаружения магнитного поля, может представлять собой импульсное радиочастотное магнитное поле B1, сформированное, например, радиочастотной катушкой 23 устройства 20 MRI, или оно может представлять собой переключаемый градиент магнитного поля, сформированный катушкой 22 градиента магнитного поля устройства 20 MRI. Здесь реализован последний вариант, и устройство 31 обнаружения данных PET дополнительно содержит радиочастотный экран 39, который служит для экранирования блока 34 обнаружения магнитного поля от импульсного радиочастотного магнитного поля B1, сформированного устройством 20 MRI (например, радиочастотной катушкой 23). В этом варианте осуществления радиочастотный экран 39 сделан из материала с подходящими характеристиками радиочастотного экранирования, такого как медь или углерод, и также содержит электронику устройства 31 обнаружения данных PET, как схематично и иллюстративно показано на фиг. 3. Эта конфигурация гарантирует, с одной стороны, что импульсное радиочастотное магнитное поле B1 не оказывает влияния или возмущения на электронику PET, включающую в себя блок 34 обнаружения магнитного поля, и, с другой стороны, что электронный шум от электроники PET также не оказывает влияния или возмущения на электронику устройства 20 MRI. Хотя высокочастотный экран 39 в значительной степени непроницаем для импульсного радиочастотного магнитного поля B1 (которое обычно находится в диапазоне приблизительно 100 МГц), переключаемые градиенты магнитного поля (которые обычно варьируют в диапазоне кГц) проникают через радиочастотный экран 39 вследствие их более низких частот и, поскольку их частоты не являются слишком низкими, индуцируют электрические токи в электронике PET. (Для сравнения, статическое магнитное поле B0 также проникает через радиочастотный экран 39, но вследствие своего однородного во времени характера не индуцирует электрические токи в электронике PET.)
Электрические токи, индуцированные переключаемыми градиентами магнитного поля в электронике PET, обычно рассматриваются как проблема в объединенных устройствах PET/MRI, и для уменьшения их влияния на сбор и обработку данных PET обычно применяются различные меры, такие как укорачивание линий передачи в максимально возможной степени или использование дифференциальных витых парных линий. С другой стороны, посредством обеспечения катушки 36 в блоке 34 обнаружения магнитного поля, как описано выше, электрические токи, индуцируемые в катушке 36 посредством переключаемого градиента магнитного поля, также могут использоваться с пользой в качестве основы для формирования метки времени обнаружения магнитного поля. С этой целью блок 34 обнаружения магнитного поля содержит блок 37 обеспечения сигналов в зависимости от обеспеченных электрических токов, причем блок 35 формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля в зависимости от обеспеченных сигналов. В этом варианте осуществления блок 34 обнаружения магнитного поля дополнительно содержит блок 38 сравнения сигнала, который служит для сравнения обеспеченных сигналов с заданным порогом сигнала, и блок 35 формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля, когда обеспеченные сигналы пересекают заданный порог сигнала. Следует отметить, что используемый здесь термин "пересекать" предназначен для широкой интерпретации, причем его значение зависит от характеристики обеспеченных сигналов, то есть от взаимоотношения между индуцированными электрическими токами в результате временных изменений переменного во времени магнитного поля и обеспеченными сигналами. Например, если "базовый" сигнал по умолчанию обеспечивается блоком 37 обеспечения сигнала в случае, когда индуцированные электрические токи не обеспечиваются катушкой 36, и если индуцированные электрические токи дают в результате уменьшение обеспеченного "базового" сигнала по умолчанию, значение слова "пересекать" также включает в себя случай, в котором обеспеченные сигналы падают ниже указанного порога сигнала, который является меньше "базового" сигнала по умолчанию.
Блок 34 обнаружения магнитного поля может быть реализован, например, посредством использования подходящей электроники аналогового и/или цифрового компаратора. В одной реализации блок 37 обеспечения сигнала в качестве сигналов обеспечивает электрические напряжения, которые зависят от индуцированных электрических токов, обеспеченных катушкой 36. Электрические напряжения могут быть получены из напряжения питания, которое "модулировано" с помощью электрического напряжения, полученного в результате падения напряжения на резисторе при прохождении электрического тока в катушке 36. Затем электрические напряжения обеспечиваются блоку 38 сравнения сигналов, который может содержать, например, специализированный компаратор или операционный усилитель, используемый в качестве компаратора, и т.п., где они сравниваются с заданным порогом сигнала, в этом случае с заданным электрическим напряжением. Если электрическое напряжение, обеспеченное 37 блоком обеспечения сигнала (то есть сигнал), больше заданного электрического напряжения (то есть заданного порога сигнала), формируется цифровой импульс, чтобы указать, что было идентифицировано временное изменение переключаемого градиента магнитного поля, и блок 35 формирования метки времени формирует метку времени обнаружения магнитного поля. Следует отметить, что другая реализация блока 37 обеспечения сигнала и/или блока 38 сравнения сигнала также возможна и может быть использована специалистом в области техники при осуществлении заявленного изобретения. Например, блок 37 обеспечения сигнала в качестве сигналов может обеспечить электрические токи или другие подходящие параметры, и обработка сигналов может являться либо аналоговой, либо цифровой, либо может быть основана на комбинации этих вариантов.
Переключаемые градиенты магнитного поля, формированные катушками 22 градиента магнитного поля устройства 20 MRI, меняются не только во времени, но также и в зависимости от позиции в пространстве. Кроме того, соответствующие последовательности импульсов MR могут отличаться по многим параметрам, таким как максимальная интенсивность и/или наклон переключения (то есть изменение интенсивности за интервал времени) переключаемых градиентов магнитного поля. Таким образом, для надежного обнаружения предпочтительно, чтобы чувствительность обнаружения переменного во времени магнитного поля, в данном случае переключаемого градиента магнитного поля, могла быть скорректирована в соответствии с обстоятельствами. В этом варианте осуществления это реализуется блоком 38 сравнения сигнала, который выполнен с возможностью предоставлять возможность корректировки заданного порога сигнала (проиллюстрировано стрелкой на фиг. 2), то есть заданный порог сигнала может быть соответствующим образом увеличен или уменьшен. Поскольку закон индукции устанавливает, что индукция пропорциональна частоте изменения магнитного поля, проходящего через область катушки, электрические токи, которые индуцированы переключаемым градиентом магнитного поля в катушке 36, зависят как от позиции, так и от ориентации устройства 31 обнаружения данных PET, в частности катушки 36 относительно переключаемого градиента магнитного поля и от параметров соответствующей последовательности импульсов MR. Посредством корректировки заданного порога сигнала согласно необходимости совместное воздействие этих различных параметров может быть соответствующим образом учтено.
Предпочтительно заданный порог сигнала будет скорректирован таким образом, что блок 34 обнаружения магнитного поля 34 не будет ложно реагировать на шум или любой другой нежелательный сигнал. Значение чуть выше уровня шума даст возможность обнаружения таких временных изменений переключаемого градиента магнитного поля, которые только возможны. В одном варианте осуществления устройство 31 обнаружения данных PET, содержащее блок 34 обнаружения магнитного поля, может быть расположено в пределах устройства 20 MRI в области, в которой переключаемый градиент магнитного поля в направлении x (как принято, обозначаемый "Gx") является особенно сильным, и блок 34 обнаружения магнитного поля может быть скорректирован таким образом, чтобы "срабатывать" при временных изменениях переключаемого градиента магнитного поля Gx. В другом варианте осуществления дополнительное или альтернативное устройство 31 обнаружения данных PET, содержащее блок 34 обнаружения магнитного поля, может быть расположено в пределах устройства 20 MRI в области, в которой переключаемый градиент магнитного поля в направлении y (как принято, обозначаемый "Gy") является особенно сильным, и блок 34 обнаружения магнитного поля может быть скорректирован таким образом, чтобы "срабатывать" при временных изменениях переключаемого градиента магнитного поля Gy. Безусловно, также возможны другие варианты осуществления. Например, в системе 10 формирования изображений, показанной на фиг. 1, каждое из двенадцати устройств 31 обнаружения данных может содержать блок 34 обнаружения магнитного поля, и соответствующие результаты обнаружения могут быть логически объединены самым подходящим образом, чтобы увеличить надежность обнаружения. Кроме того, блок 34 обнаружения магнитного поля может быть выполнен с возможностью "срабатывать" только при некоторых временных изменениях переключаемого градиента магнитного поля, например только при соответствующем возрастании переключаемого градиента магнитного поля.
Катушка 36 может быть реализована в блоке 34 обнаружения магнитного поля различными средствами. Например, устройство 31 обнаружения данных PET этого варианта осуществления содержит печатную плату (PCB) 40, как схематично и иллюстративно показано на фиг. 4. На печатной плате реализованы различные компоненты электроники PET. В этом варианте осуществления обеспечены две катушки 36, которые в значительной степени сделаны из дорожек 41 печатной платы, но катушка 36 также может содержать катушку индуктивности без сердечника, которая может быть, например, припаяна к печатной плате. Первая катушка 36, показанная на правой стороне рисунка на краю печатной платы, простирается и на передней стороне, и на задней стороне печатной платы, тем самым обеспечивая петлю, которая соответствующим образом ориентирована для обнаружения переключаемых градиентов магнитного поля, сформированных устройством 20 MRI, когда устройство 31 обнаружения данных PET расположено в пределах системы 10 формирования изображений, как показано на фиг. 1. (Переключаемые градиенты магнитного поля обычно выровнены со статическим магнитным полем B0, то есть они простираются в направлении z.) Вторая катушка 36, показанная на передней стороне печатной платы, расположена (в значительной степени) перпендикулярно по отношению к первой катушке 36 и может использоваться для обнаружения "паразитных" компонентов переключаемых градиентов магнитного поля, перпендикулярных по отношению к статическому магнитному полю B0. Такие "паразитные" компоненты обычно нежелательны, но могут возникать в устройстве 20 MRI, поскольку система градиента магнитного поля никогда не может быть 100% идеальной. Если третья катушка 36 (не показана) расположена (в значительной степени) перпендикулярно по отношению и к первой, и ко второй катушке 36, и если эта третья катушка 36 также используется для обнаружения таких "паразитных" компонентов, информация, предоставленная тремя (в значительной степени) перпендикулярно расположенными катушками 36, может использоваться для определения расположения и/или ориентации устройства обнаружения данных PET относительно переключаемых градиентов магнитного поля - при условии, что достаточное знание о характеристиках "паразитных" компонентов, формируемых устройством 20 MRI, является доступным, например, из более ранних измерений.
Блок 35 формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля в соответствии с базой единого времени, которая также используется для формирования меток времени данных для данных, обнаруженных посредством устройства 31 обнаружения данных PET. В этом варианте осуществления каждое из двенадцати устройств 31 обнаружения данных PET, показанных на фиг. 1, содержит интерфейс для приема информации синхронизации от общих системных часов устройства 30 PET (не показаны), чтобы обеспечить согласованное формирование меток времени событий обнаружения гамма-лучей с энергией 511 кэВ (то есть согласованно формировать метки времени данных для обнаруженных данных PET) в двенадцати устройствах 31 обнаружения данных PET. Блок 35 формирования меток времени использует одинаковую информацию синхронизации от общих системных часов для формирования меток времени обнаружения магнитного поля. Здесь сформированные метки времени обнаружения магнитного поля сохраняются с другими "метаданными" PET, такими как температура устройства и т.д.
Как описано выше, метки времени обнаружения магнитного поля, сформированные блоком обнаружения магнитного поля, обеспечивают временное отношение с собранными данными MRI, которые дают возможность усовершенствованного воссоздания изображения PET. Например, если сбор данных PET начат раньше, чем сбор данных MRI (что обычно имеет место из-за более длительного времени, требуемого для сбора данных PET), сформированные метки времени обнаружения магнитного поля обеспечивают необходимую информацию для определения, когда сбор данных MRI был начат относительно сбора данных PET. Кроме того, возможно соотнести во времени индивидуальные воссозданные изображения MRI с собранными данными PET.
Далее будет описан способ формирования изображений со ссылкой на блок-схему последовательности операций, показанную на фиг. 5.
На этапе 101 выполняется магнитно-резонансная томография (MRI). Кроме того, выполняется обнаружение данных - в этом варианте осуществления обнаружение данных PET - причем на этапе 102 обнаруживается переменное во времени магнитное поле, сформированное посредством способа MRI, и причем на этапе 103 в зависимости от обнаруженного переменного во времени магнитного поля формируются метки времени обнаружения магнитного поля. При этом переменное во времени магнитное поле обнаруживается блоком 34 обнаружения магнитного поля, и метки времени обнаружения магнитного поля формируются блоком 35 формирования меток времени. Вариант осуществления таких компонентов схематично и иллюстративно показан на фиг. 2.
Этапы 102 и 103 могут рассматриваться как этапы способа обнаружения данных для использования в комбинации со способом магнитно-резонансной томографии (MRI).
В описанных выше вариантах осуществления устройством обнаружения данных для использования в комбинации с устройством магнитно-резонансной томографии (MRI) является устройство обнаружения данных позитронно-эмиссионной томографии (PET), но им также может являться устройство обнаружения ядерных данных другого типа, такое как устройство обнаружения данных однофотонной эмиссионной компьютерной томографии (SPECT), или, например, им может являться устройство обнаружения ультразвуковых данных или любое другое устройство обнаружения данных, которое может соответствующим образом использоваться в комбинации с устройством MRI и которое может извлечь пользу из возможности определять временное отношение с собранными данными MRI. В частности, устройством обнаружения данных также может являться устройство, которое обеспечено в медицинских целях, отличающихся от формирования изображения, например им может являться устройство для обнаружения одного или нескольких жизненных параметров пациента.
Блок обнаружения магнитного поля также может в некоторых вариантах осуществления использовать датчик на эффекте Холла или сопоставимое устройство для обнаружения переменного во времени магнитного поля, сформированного устройством магнитно-резонансной томографии (MRI). Другие варианты осуществления могут быть даже основаны на использовании ориентации элементов, которые выравнивают себя вдоль магнитного поля, или на подобных эффектах компаса.
Возможно, что блок обнаружения магнитного поля скорректирован, например, посредством подходящей корректировки заданного порога (порогов) сигнала, в результате чего он обнаруживает только особенно сильные временные изменения переменного во времени магнитного поля, которые могут возникать в соответствующей последовательности импульсов МР только в заданных временных позициях. Это может минимизировать количество избыточных данных, которые будут обработаны. Также возможно, что такие особенно сильные временные изменения переменного во времени магнитного поля (которые не могут использоваться процессом MRI) явно включены в последовательность импульсов MR, например, в любой момент до снимка изображение MRI или до измерения навигатора с целью обнаружения блоком обнаружения магнитного поля.
Также возможно, что в блоке обнаружения магнитного поля катушка или другой компонент, который чувствителен к переменному во времени магнитному полю, расположен с возможностью ориентации. Это может позволить ориентировать катушку или другой компонент наиболее подходящим образом, например наиболее чувствительным образом к переменному во времени магнитному полю в зависимости от позиции и/или ориентации устройства обнаружения данных относительно переменного во времени магнитного поля. Например, катушка или другой компонент могут быть установлены на суставе или точке вращения, которые дают возможность изменения ориентации, по меньшей мере, в одном измерении, предпочтительно во всех трех измерениях.
Как описано выше, возможно, что переменное во времени магнитное поле, которое будет обнаружено блоком обнаружения магнитного поля, является импульсным радиочастотным магнитным полем B1. В случае, когда устройством обнаружения данных является устройство обнаружения данных PET или другое устройство с сопоставимой чувствительной электроникой, электроника может быть помещена в радиочастотный экранирующий корпус, выполненный из материала с подходящими характеристиками радиочастотного экранирования, такого как медь или углерод, а блок обнаружения магнитного поля, если таковой применяется, по меньшей мере, катушка или другой компонент, который чувствителен к импульсному радиочастотному магнитному полю B1, может предусматриваться вне радиочастотного экрана.
В некоторых вариантах осуществления блок обнаружения магнитного поля может содержать, например, по меньшей мере, три в значительной степени параллельно ориентированных катушки, которые расположены в треугольнике, простирающемся в каждом из направлений x, y и z. Используя знание о варьирующемся в пространстве характере переключаемых градиентов магнитного поля, сформированных устройством MRI, например зная их максимальную интенсивность и их наклон переключения, на основе упомянутых электрических токов, обеспеченных, по меньшей мере, тремя в значительной степени параллельно ориентированными катушками, возможно определить позицию и/или ориентацию устройства обнаружения данных.
В описанных выше вариантах осуществления переменное во времени магнитное поле, которое должно быть обнаружено блоком обнаружения магнитного поля, представляет собой переключаемый градиент магнитного поля, и электроника устройства обнаружения данных PET помещена в высокочастотный экранирующий корпус, выполненный из материала с подходящими характеристиками радиочастотного экранирования, такого как медь или углерод. Если такое радиочастотное экранирование не используется, можно уменьшить и/или компенсировать влияние импульсного радиочастотного магнитного поля B1 на обнаружение переключаемого градиента магнитного поля посредством подходящих методов фильтрации.
Другие изменения раскрытых вариантов осуществления могут быть понятны специалистам в рассматриваемой области техники и реализованы ими при осуществлении заявленного изобретения на основании изучения чертежей, раскрытия и приложенной формулы изобретения.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, а использование единственного числа не исключает множества.
Один блок или устройство может выполнять функции нескольких элементов, изложенных в формуле изобретения. Сам факт того, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может использоваться для достижения преимущества.
Такие операции, как обнаружение переменного во времени магнитного поля, формирование меток времени обнаружения магнитного поля и т.д., выполняемые одним или несколькими блоками или устройствами, могут быть выполнены посредством любого количества блоков или устройств. Например, такие этапы, как обеспечение электрических токов, индуцированных временными изменениями переменного во времени магнитного поля, и обеспечение сигналов в зависимости от обеспеченных электрических токов могут быть выполнены одним блоком, двумя разными блоками или любым другим количеством разных блоков. Эти операции и/или управление устройством обнаружения данных в соответствии со способом обнаружения данных и/или управления устройством формирования изображений в соответствии со способом формирования изображений могут быть реализованы как средство программного кода компьютерной программы и/или как специализированные аппаратные средства.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или полупроводниковый носитель, представленный вместе с другими аппаратными средствами или как их часть, но также может распространяться в другой форме, например через Интернет или другие проводные или беспроводные системы связи.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема.
Реферат
Использование: для обнаружения данных при использовании в комбинации с устройством магнитно-резонансной томографии (MRI). Сущность изобретения заключается в том, что блок обнаружения магнитного поля служит для обнаружения переменного во времени магнитного поля, сформированного устройством MRI, и блок формирования меток времени формирует метки времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля. Технический результат: обеспечение возможности определять временное соотношение с собранными данными MRI. 6 н. 9 з.п. ф-лы, 5 ил.
Формула
блок (34) обнаружения магнитного поля для обнаружения переменного во времени магнитного поля, сформированного устройством (20) MRI, и
блок (35) формирования меток времени для формирования меток времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля.
по меньшей мере, одну катушку (36) для обеспечения электрических токов, индуцированных временными изменениями переменного во времени магнитного поля, и
блок (37) обеспечения сигналов для обеспечения сигналов в зависимости от обеспеченных электрических токов,
причем блок (35) формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля в зависимости от обеспеченных сигналов.
блок (38) сравнения сигналов для сравнения обеспеченных сигналов с заданным порогом сигнала,
причем блок (35) формирования меток времени выполнен с возможностью формировать метки времени обнаружения магнитного поля, когда обеспеченные сигналы пересекают заданный порог сигнала.
устройство (20) магнитно-резонансной томографии (MRI), и
устройство (31) обнаружения данных по п. 1.
обнаруживают переменное во времени магнитное поле, сформированное способом MRI, посредством блока (34) обнаружения магнитного поля,
формируют метки времени обнаружения магнитного поля в зависимости от обнаруженного переменного во времени магнитного поля посредством блока (35) формирования меток времени.
магнитно-резонансную томографию (MRI), и
обнаружение данных по п. 12.
Комментарии