Способы для лазерного зажигания и измерения - RU2628107C2
Код документа: RU2628107C2
Чертежи







Описание
УРОВЕНЬ ТЕХНИКИ
На транспортных средствах с электрическим гибридным приводом (HEV) и транспортных средствах с пуском-остановом двигатель внутреннего сгорания (ICE) может останавливаться или выводиться из работы во время выбранных условий. Остановка двигателя может сберегать топливо посредством избегания определенных условий, например, таких как условия холостого хода. Когда это происходит, коленчатый вал и распределительные валы двигателя могут останавливаться в неизвестных положениях цикла двигателя. Для того, чтобы перезапускать двигатель, положение кулачков/поршней может определяться, так чтобы последовательное и точное топливоснабжение и установка момента зажигания могли обеспечиваться для получения надежных запусков с низкими выбросами. По существу, точное и своевременное узнавание положений поршней и кулачков двигателя во время запуска может давать возможность координации установки момента зажигания и подачи топлива в двигателе.
Некоторые способы определения положения поршней или двигателя полагаются на колесо синхронизации коленчатого вала с конечным числом зубьев и промежутков для обеспечения синхронизации в координации с измерениями распределительных валов. Так как информация о положении коленчатого вала типично вырабатывается с использованием зубчатого колеса с отсутствующим зубцом, модуль управления двигателем может определять относительное положение двигателя для каждого цилиндра. Коленчатый вал поворачивается дважды за цикл двигателя, таким образом, чтобы однозначно идентифицировать положение двигателя, информация для коленчатого вала комбинируется с идентификацией цилиндра (CID). При перезапуске двигателя модуль управления двигателем, поэтому, типично ожидает определения положения двигателя до начала последовательного впрыска топлива, что навлекает время задержки в процессе возобновления работы. Один из примеров показан US 7 765 980, где положение двигателя идентифицируется посредством датчика угла поворота коленчатого вала.
Изобретатели в материалах настоящей заявки осознали проблемы у таких подходов. Например, в зависимости от температуры двигателя может меняться время для идентификации положения коленчатого вала относительно положения распределительного вала. Такое непостоянство определения относительного положения между распределительным валом и коленчатым валом (для того чтобы идентифицировать положения двигателя и поршней) может приводить к уменьшенной способности достижения и поддержания быстрой синхронизации, надежного сгорания и сниженных выбросов. Кроме того, любые задержки при идентификации положения двигателя также могут задерживать запуск двигателя. При запуске двигателя в ответ на запрос пуска в ход транспортного средства, такие задержки затем воплощаются в задержках реакции транспортного средства, снижая удовлетворенность потребителя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном из примерных подходов некоторые из вышеприведенных проблем могут быть препоручены способу, содержащему приведение в действие лазерного устройства зажигания в цилиндре двигателя и синхронизацию подачи топлива на основании считанного лазером положения двигателя, и воспламенение смеси воздуха и топлива в цилиндре с помощью лазерного устройства зажигания. Таким образом, может быть возможным использовать преимущества лазерной системы зажигания для повышения точности идентификации положения двигателя (посредством измерений положения кулачков и поршней), такой как во время запуска двигателя. Например, такой подход может давать более быструю и более точную информацию о положении, скорости двигателя/поршня и т.д. Посредством более ранней идентификации такой информации во время проворачивания коленчатого вала двигателя (или даже до проворачивания коленчатого вала), может достигаться более быстрая синхронизация с распределительным валом, приводя к более ранней подаче топлива и сгоранию в двигателе. Преимуществом вышеприведенного аспекта изобретения является более быстрое среднее время запуска двигателя, а также улучшенная удовлетворенность потребителя, улучшенная экономия топлива и пониженные выбросы.
Более конкретно, в настоящей заявке раскрыт способ, состоящий в том, что приводят в действие лазерное устройство зажигания в цилиндре двигателя; синхронизируют подачу топлива на основании считанного лазером положения двигателя и воспламеняют смесь воздуха и топлива в цилиндре с помощью лазерного устройства зажигания.
В дополнительном аспекте синхронизация подачи топлива заключается в том, что однозначно идентифицируют положение двигателя на основании работы лазера.
В другом дополнительном аспекте однозначная идентификация положения двигателя заключается в том, что определяют положение поршней двигателя и положение клапанов цилиндра, чтобы идентифицировать такт цилиндра двигателя.
В еще одном дополнительном аспекте идентификация положения поршней двигателя и положения клапанов цилиндра заключается в том, что приводят в действие лазер в режиме работы с более низкой мощностью, а воспламенение смеси топлива и воздуха заключается в том, что приводят в действие лазер в режиме работы с более высокой мощностью.
В еще одном дополнительном аспекте лазерное устройство зажигания действует в режиме более низкой мощности для выявления положения поршня двигателя на основании лазерного сигнала, отраженного от поршня.
В еще одном дополнительном аспекте лазерное устройство зажигания действует в режиме более низкой мощности для выявления положения клапанов цилиндра на основании лазерного сигнала, отраженного от клапана цилиндра.
В еще одном дополнительном аспекте определение положения клапанов основано на по существу блокировании клапаном цилиндра лазерного сигнала низкой мощности.
В еще одном дополнительном аспекте определение положения двигателя основано на детектировании каждого из отраженных световых импульсов и ослабленных сигналов из по существу блокированных лазерных импульсов внутри цилиндра.
Еще один дополнительный аспект дополнительно состоит в том, что определяют число оборотов двигателя в ответ на приведение в действие лазера и настраивают впрыск топлива на основании определенного положения двигателя и числа оборотов двигателя.
В еще одном дополнительном аспекте установка момента и величина впрыска топлива основаны на идентифицированных положении двигателя и числе оборотов двигателя.
В еще одном дополнительном аспекте выбор цилиндра для первого впрыска топлива основан на положении двигателя.
В еще одном дополнительном аспекте однозначная идентификация положения двигателя включает в себя по меньшей мере одно из импульсного измерения лазером в режиме низкой мощности; и частотной модуляции лазера с периодически повторяющимся линейным изменением частоты; и определения положения поршня на основании расстояния, указанного сдвигом частоты, измеренным посредством считанных отражений лазера поршнем; и определения положения клапана на основании света в цилиндре.
В еще одном дополнительном аспекте однозначная идентификация положения двигателя заключается в том, что идентифицируют доплеровский сдвиг частоты, отраженной поршнем и измеренной датчиком, присоединенным к цилиндру.
Еще один дополнительный аспект дополнительно состоит в том, что указывают число оборотов двигателя на основании множества идентифицированных положений двигателя посредством лазерного устройства зажигания.
Также раскрыт способ, состоящий в том, что синхронизируют первое событие сгорания от состояния покоя при запуске двигателя посредством того, что приводят в действие лазерное устройство зажигания, присоединенное к цилиндру двигателя, чтобы идентифицировать положение двигателя, в ответ на считанный свет в цилиндре; и воспламеняют смесь воздуха и топлива в цилиндре с помощью лазерного устройства зажигания с установкой момента воспламенения, основанной на идентифицированном положении двигателя.
Дополнительный аспект дополнительно состоит в том, что впрыскивают топливо в ответ на идентифицированное положение двигателя, чтобы сформировать смесь.
В другом дополнительном аспекте топливо впрыскивается непосредственно в цилиндр.
В еще одном дополнительном аспекте топливо впрыскивается во впускной коллектор для формирования смеси перед поступлением в цилиндр двигателя.
В еще одном дополнительном аспекте положение двигателя дополнительно идентифицируется на основании положения распределительного вала и коленчатого вала.
Кроме того, раскрыт способ, состоящий в том, что останавливают двигатель в ответ на условия выключения холостого хода; синхронизируют первое событие сгорания от остановки при перезапуске двигателя, приводят в действие лазерное устройство зажигания в цилиндре двигателя; и идентифицируют положение двигателя в ответ на считанный свет в цилиндре; и воспламеняют смесь воздуха и топлива в цилиндре с помощью лазерного устройства зажигания с установкой момента воспламенения, основанной на идентифицированном положении двигателя.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного объекта патентования, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный объект патентования не ограничен реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает схематическое изображение примерного транспортного средства с гибридным приводом.
Фиг. 2 показывает принципиальную схему примерного двигателя внутреннего сгорания.
Фиг. 3а и 3b показывают принципиальные схемы примерного цилиндра двигателя.
Фиг. 4 показывает примерный четырехцилиндровый двигатель, остановленный в произвольном положении в своем ездовом цикле.
Фиг. 5 показывает два режима работы лазерной системы во время примерного цикла двигателя и примерные данные для однозначной идентификации положения двигателя с использованием лазерной системы.
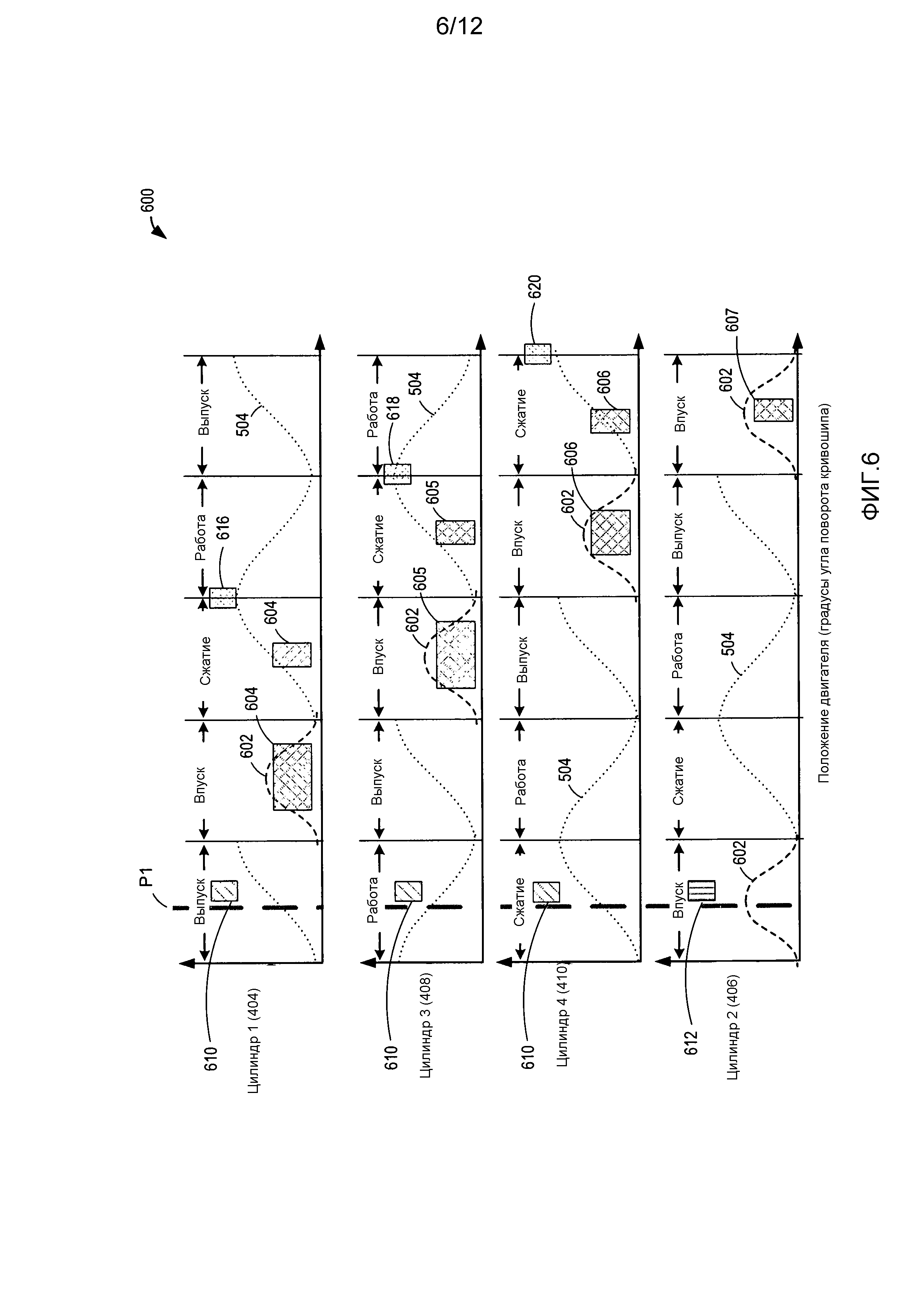
Фиг. 6 показывает примерную многомерную характеристику установки фаз газораспределения и положения поршня относительно положения двигателя во время примерного цикла двигателя для двигателя с непосредственным впрыском.
Фиг. 7 показывает примерную многомерную характеристику установки фаз газораспределения и положения поршня относительно положения двигателя во время примерного цикла двигателя для двигателя с впрыском топлива во впускные каналы.
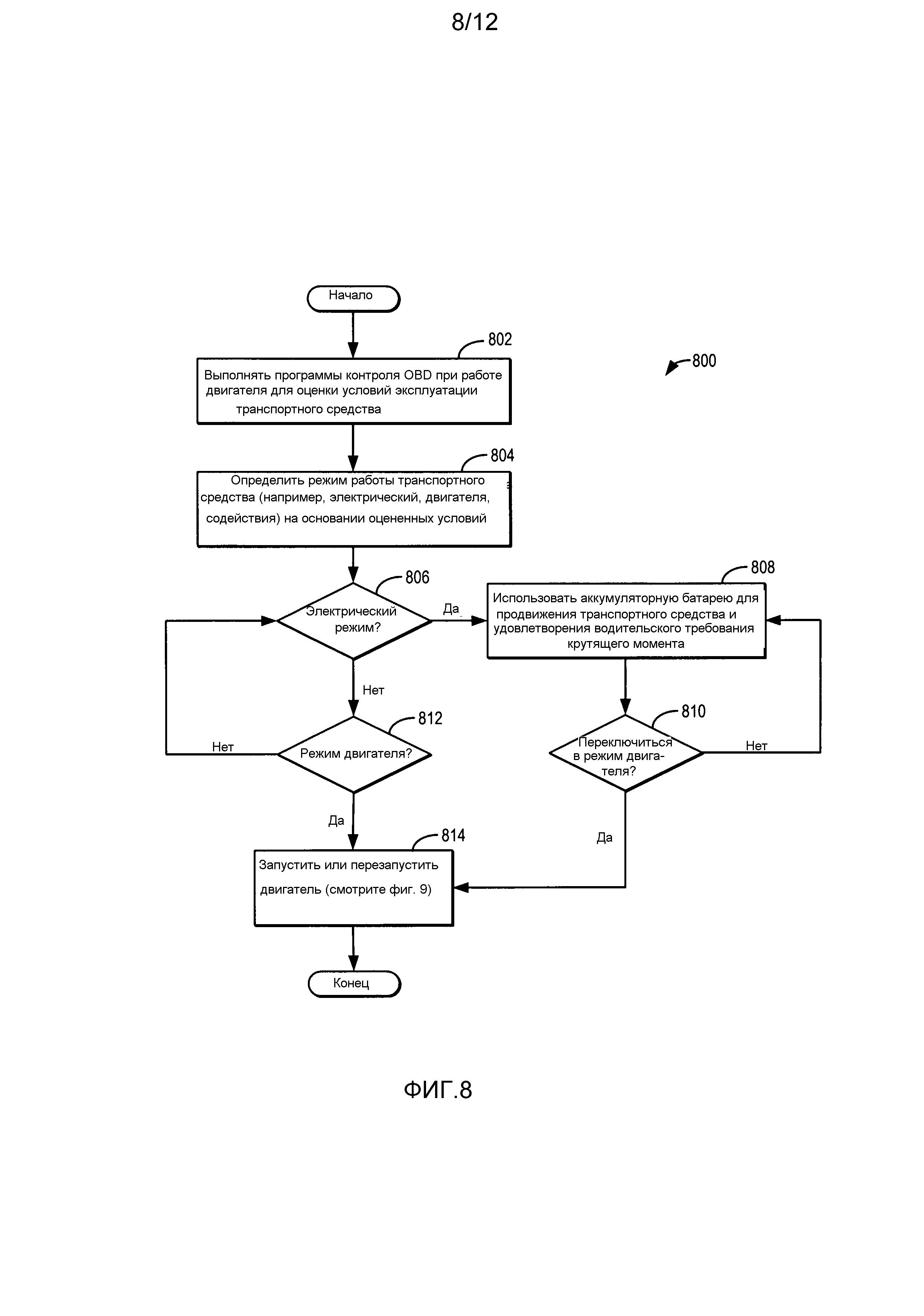
Фиг. 8 показывает примерный способ для выполнения различных бортовых диагностических программ во время работы двигателя при ездовом цикле транспортного средства.
Фиг. 9 показывает примерный способ для запуска или перезапуска двигателя во время действия примерного ездового цикла транспортного средства.
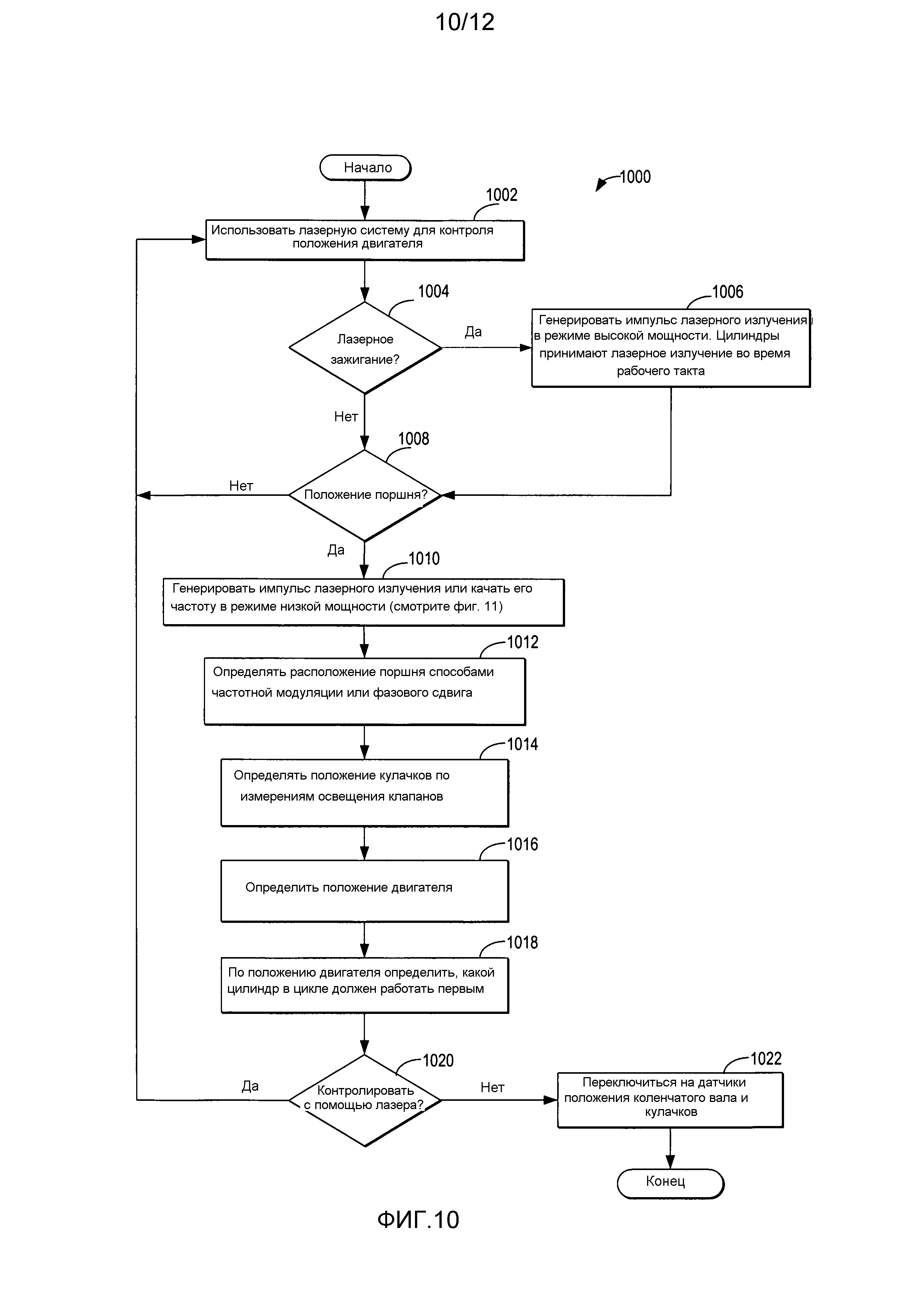
Фиг. 10 показывает примерный способ для эксплуатации лазерной системы в двух режимах на основании рабочего состояния двигателя внутреннего сгорания.
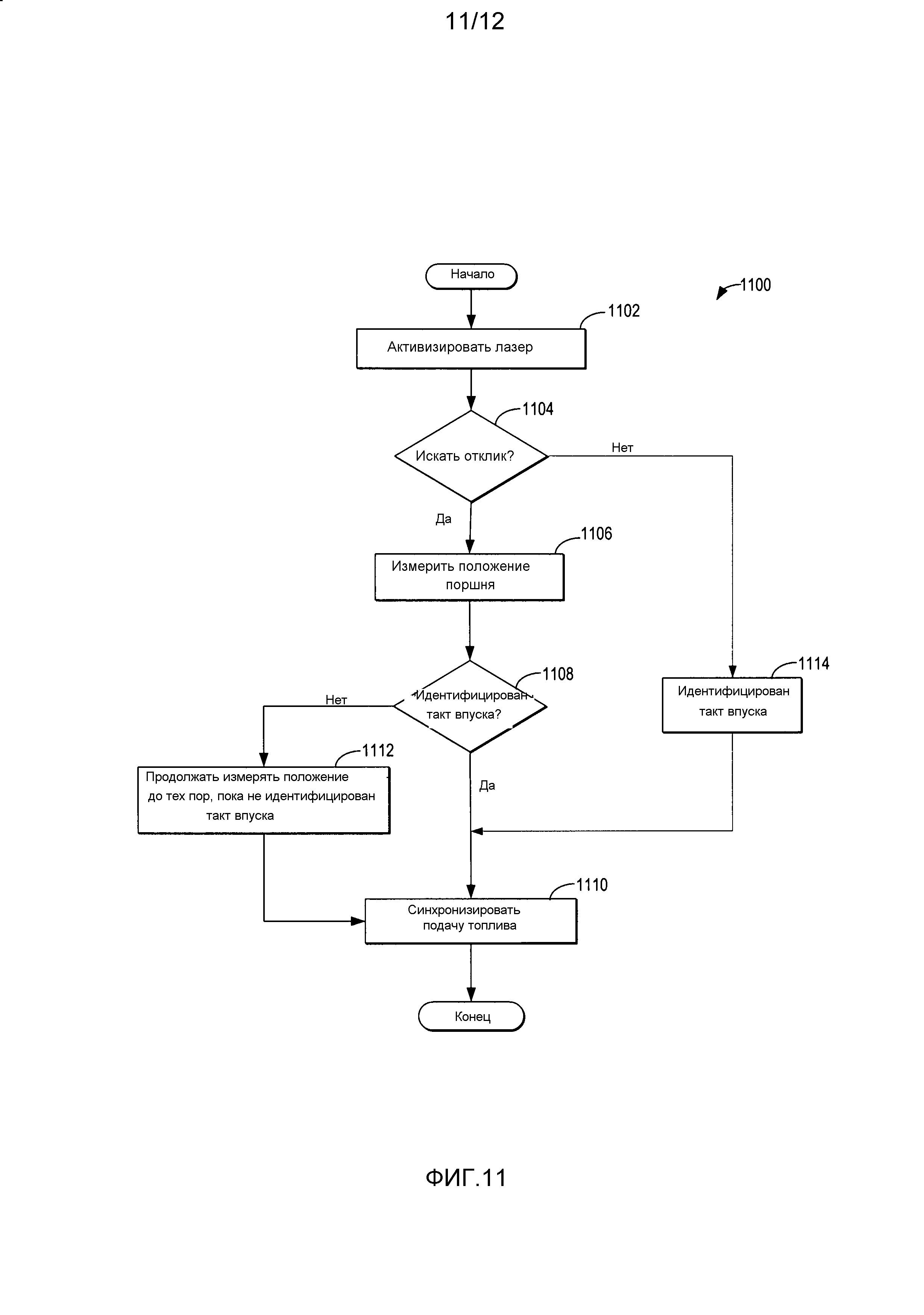
Фиг. 11 показывает примерный способ для синхронизации подачи топлива на основании двух режимов детектирования лазера.
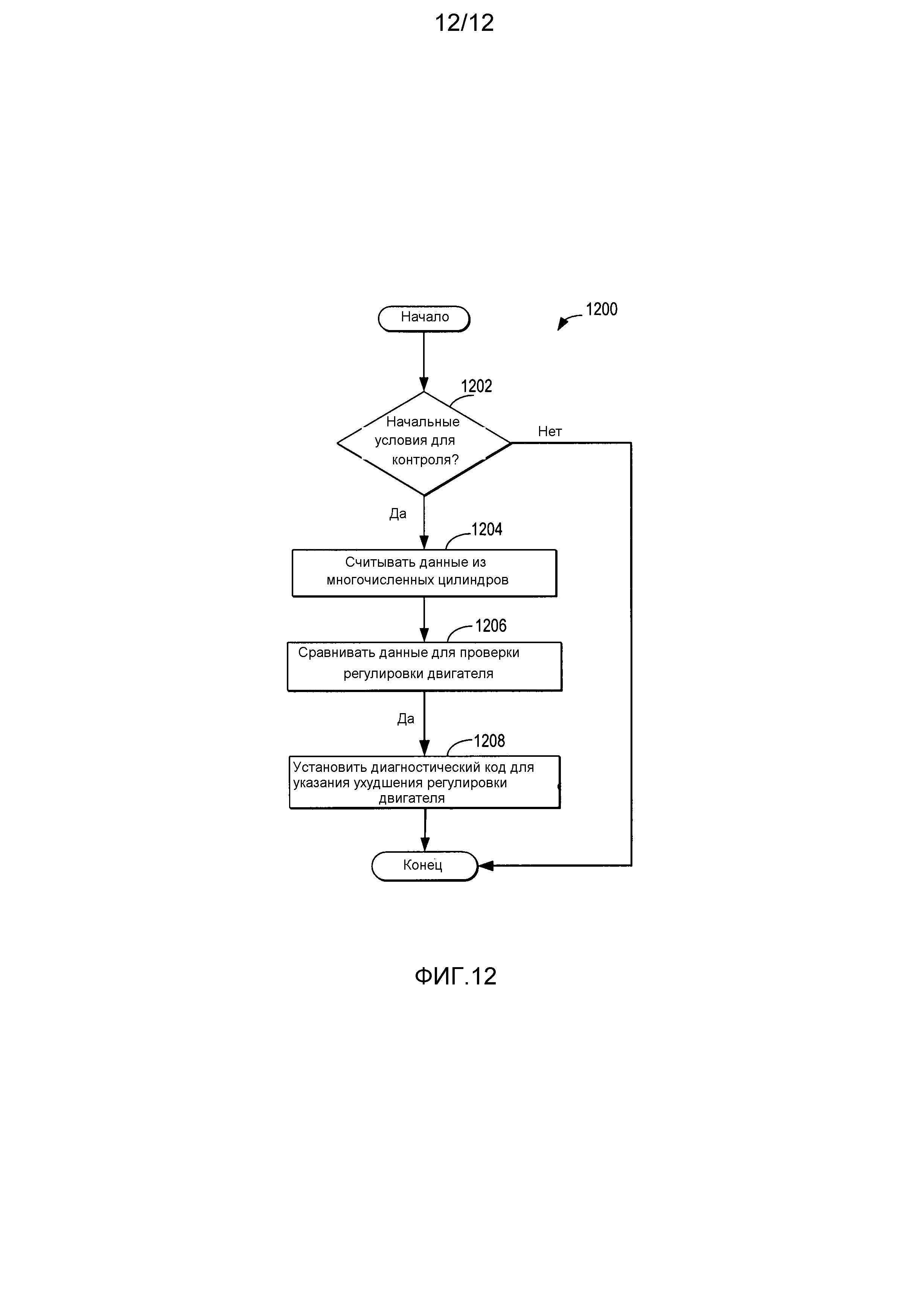
Фиг. 12 показывает примерный способ для идентификации ухудшения характеристик двигателя в соответствии с раскрытием.
ПОДРОБНОЕ ОПИСАНИЕ
Предусмотрены способы и системы для повышения эффективности запуска двигателя транспортного средства с гибридным приводом, такого как показанное на фиг. 1. В одном из примеров определение и точность положения поршней и кулачков может достигаться раньше и быстрее в последовательности запуска двигателя с использованием лазерной системы зажигания, присоединенной к системе двигателя, такой как показанная на фиг. 2-4. Например, для повышения скорости сбора данных информации считывания установки фаз кулачкового распределения, настройки управления с обратной связью могут быть основаны на лазерных импульсах внутри цилиндра двигателя в качестве средства определения положения кулачков и поршня при оптимизации подачи топлива. Контроллер затем поддерживает установку фаз газораспределения на требуемом значении на основании обратной связи по положению кулачков относительно положения коленчатого вала. Фиг. 5 показывает два режима детектирования лазерной системы во время примерного цикла двигателя и примерные данные для однозначной идентификации положения двигателя с использованием лазерной системы. Фиг. 6-7 показывают многомерные характеристики положения поршня и установки фаз газораспределения для двигателей с непосредственным впрыском и впрыском во впускные каналы, непосредственно. Для образцового положения двигателя по фиг. 4, эти многомерные характеристики иллюстрируют, каким образом лазерная система, присоединенная к контроллеру, может работать в двух режимах мощности во время ездового цикла двигателя. Например, режим низкой мощности может использоваться для определения положения двигателя наряду с тем, что режим высокой мощности может использоваться для воспламенения топливовоздушной смеси. Система управляется контроллером согласно различным программам, проиллюстрированным на фиг. 8-12. Эти фигуры иллюстрируют различные программы управления для повышения эффективности запуска двигателя, которые могут выполняться системой управления двигателя по фиг. 1-2.
Со ссылкой на фиг. 1, эта фигура схематически изображает транспортное средство с гибридной силовой установкой 10. Гибридная силовая установка 10 включает в себя двигатель 20 внутреннего сгорания, присоединенный к трансмиссии 16. Трансмиссия 16 может быть ручной трансмиссией, автоматической трансмиссией или их комбинацией. Кроме того, могут быть включены в состав различные дополнительные компоненты, такие как гидротрансформатор, и/или другие зубчатые передачи, такие как звено главной передачи и т.д. Трансмиссия 16 показана присоединенной к ведущему колесу 14, которое может контактировать с поверхностью дороги.
В этом примерном варианте осуществления, гибридная силовая установка также включает в себя устройство 18 преобразования энергии, которое, среди прочего, может включать в себя электродвигатель, генератор и их комбинации. Устройство 18 преобразования энергии дополнительно показано присоединенным к устройству 22 накопления энергии, которое может включать в себя аккумуляторную батарею, конденсатор, маховик, баллон высокого давления и т.д. Устройство преобразования энергии может приводиться в действие, чтобы поглощать энергию от движения транспортного средства и/или двигателя и преобразовывать поглощенную энергию в форму энергии, пригодную для хранения устройством накопления энергии (другими словами, обеспечивать работу генератора). Устройство преобразования энергии также может приводиться в действие, чтобы подавать выходную мощность (мощность, работу крутящий момент, скорость, и т.д.) на ведущее колесо 14 и/или двигатель 20 (другими словами, обеспечивать работу электродвигателя). Должно быть принято во внимание, что устройство преобразования энергии, в некоторых вариантах осуществления, может включать в себя электродвигатель, генератор или оба, электродвигатель и генератор, в числе различных других компонентов, используемых для обеспечения надлежащего преобразования энергии между устройством накопления энергии и ведущими колесами и/или двигателем транспортного средства.
Изображенные соединения между двигателем 20, устройством 18 преобразования энергии, трансмиссией 16 и ведущим колесом 14, могут указывать передачу механической энергии с одного компонента на другой, тогда как соединения между устройством 18 преобразования энергии и устройством 22 накопления энергии могут указывать передачу многообразия форм энергии, таких как электрическая, механическая и т.д. Например, крутящий момент может передаваться с двигателя 20, чтобы приводить в движение ведущее колесо 14 транспортного средства, через трансмиссию 16. Как описано выше, устройство 22 накопления энергии может быть выполнено с возможностью работать в режиме генератора и/или режиме электродвигателя. В режиме генератора, система 10 может поглощать некоторую или всю выходную мощность из двигателя 20 и/или трансмиссии 16, что может уменьшать величину приводной выходной мощности, подаваемой на ведущее колесо 14. Кроме того, выходная мощность, принимаемая устройством преобразования энергии, может использоваться для зарядки устройства 22 накопления энергии. В качестве альтернативы, устройство 22 накопления энергии может принимать электрический заряд из внешнего источника 24 энергии, такого как штепсельное соединение для источника сетевого питания. В режиме электродвигателя, устройство преобразования энергии может подавать механическую выходную мощность на двигатель 20 и/или трансмиссию 16, например, используя электрическую энергию, накопленную в электрической аккумуляторной батарее.
Варианты осуществления с гибридной силовой установкой могут включать в себя полностью гибридные системы, в которых транспортное средство может передвигаться только на двигателе, только на устройстве преобразования энергии (например, электродвигателе) или комбинации того и другого. Также могут применяться вспомогательные или умеренные гибридные конфигурации, в которых двигатель является основным источником крутящего момента с гибридной силовой установкой, действующей, чтобы избирательно выдавать добавочный крутящий момент, например, во время увеличения нагрузки на двигатель при постоянном числе оборотов или других условий. Кроме того еще, также могут использоваться системы стартера/генератора и/или генератора переменного тока с развитой логикой.
Из вышеприведенного должно быть понятно, что примерная гибридная силовая установка способна на различные режимы работы. Например, в первом режиме, двигатель 20 включен и действует в качестве источника крутящего момента, приводящего в движение ведущее колесо 14. В этом случае, транспортное средство эксплуатируется в режиме «включенного двигателя», и топливо подается в двигатель 20 (изображено подробнее на фиг. 2) из топливной системы 100. Топливная система 100 включает в себя систему 110 восстановления паров топлива для накопления паров топлива и снижения выбросов из силовой установки 10 транспортного средства с гибридным приводом.
В другом режиме силовая установка может действовать с использованием устройства 18 преобразования энергии (например, электрического двигателя) в качестве источника крутящего момента, приводящего в движение транспортное средство. Этот режим «отключенного двигателя» может применяться во время торможения, низких скоростей, в то время как останавливается на светофорах и т.д. В еще одном другом режиме, который может называться режим «содействия», альтернативный источник крутящего момента может дополнять и действовать совместно с крутящим моментом, выдаваемым двигателем 20. Как указано выше, устройство 18 преобразования энергии также может работать в режиме генератора, в котором крутящий момент поглощается из двигателя 20 и/или трансмиссии 16. Более того, устройство 18 преобразования энергии может действовать для усиления или поглощения крутящего момента во время переходов двигателя 20 между разными режимами сгорания (например, во время переходов между режимом искрового зажигания и режимом воспламенения от сжатия).
Различные компоненты, описанные выше со ссылкой на фиг. 1, могут управляться системой 41 управления транспортным средством, которая включает в себя контроллер 12 с машинно-читаемыми командами для выполнения программ и подпрограмм для регулирования систем транспортного средства, множество датчиков 42 и множество исполнительных механизмов 44.
Фиг. 2 показывает принципиальную схему примерного цилиндра многоцилиндрового двигателя 20 внутреннего сгорания. Двигатель 20 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала РР положения педали.
Цилиндр 30 сгорания двигателя 20 может включать в себя стенки 32 цилиндра сгорания с поршнем 36, расположенным в них. Поршень 36 может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Цилиндр 30 сгорания может принимать всасываемый воздух из впускного коллектора 45 через впускной канал 43 и может выпускать газообразные продукты сгорания отработавших газов через выпускной канал 48. Впускной коллектор 45 и выпускной канал 48 могут избирательно сообщаться с цилиндром 30 сгорания через соответственные впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления цилиндр 30 сгорания может включать в себя два или более впускных клапана и/или два или более выпускных клапана.
Двигатель 20 опционально может включать в себя датчики 55 и 57 положения кулачков. Однако в показанном примере впускной клапан 52 и выпускной клапан 54 могут управляться посредством приведения в действие кулачков через соответственные системы 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из систем переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), изменения фаз газораспределения (VVT) и/или изменения подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Чтобы давать возможность выявления положения кулачков, системы 51 и 53 кулачкового привода могут иметь зубчатые колеса. Положение впускного клапана 52 и выпускного клапана 54 может определяться датчиками 55 и 57 положения, соответственно. В альтернативных вариантах осуществления, впускной клапан 52 и/или выпускной клапан 54 могут управляться посредством возбуждения клапанного распределителя с электромагнитным управлением. Например, цилиндр 30, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством возбуждения клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT.
Топливная форсунка 66 показана присоединенной непосредственно к цилиндру 30 сгорания для впрыска топлива непосредственно в него пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно в качестве непосредственного впрыска топлива в цилиндр 30 сгорания. Топливная форсунка, например, может быть установлена сбоку цилиндра сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель топлива. В некоторых вариантах осуществления цилиндр 30 сгорания, в качестве альтернативы или дополнительно, может включать в себя топливную форсунку, скомпонованную во впускном канале 43, в конфигурации, которая обеспечивает то, что известно как впрыск топлива во впускной канал, выше по потоку от цилиндра 30 сгорания.
Впускной канал 43 может включать в себя клапан 74 управления движением заряда (CMCV) и заслонку 72 CMCV, также может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, включенный дросселем 62, конфигурацией, которая может называться электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие, чтобы регулировать всасываемый воздух, выдаваемый в цилиндр 30 сгорания, среди других цилиндров сгорания двигателя. Впускной канал 43 может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответственных сигналов MAF и MAP в контроллер 12.
Датчик 126 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. Датчик 126 может быть любым подходящим датчиком для выдачи показания топливовоздушного соотношения в отработавших газах, таким как линейный датчик содержания кислорода или UEGO (универсальный или широкодиапазонный датчик содержания кислорода в отработавших газах), двухрежимный датчик содержания кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, НС или СО. Система выпуска может включать в себя розжиговые каталитические нейтрализаторы и каталитические нейтрализаторы низа кузова, а также выпускной коллектор, расположенные выше по потоку и/или ниже по потоку датчики топливовоздушного соотношения. Каталитический нейтрализатор 70 отработавших газов может включать в себя многочисленные блоки нейтрализатора в одном из примеров. В еще одном примере могут использоваться многочисленные устройства снижения токсичности выбросов, каждое с многочисленными брикетами. Каталитический нейтрализатор 70 отработавших газов, в одном из примеров, может быть каталитическим нейтрализатором трехкомпонентного типа.
Контроллер 12 показан на фиг. 2 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 109 и шину данных. Контроллер 12 может принимать различные сигналы и информацию с датчиков, присоединенных к двигателю 20, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ЕСТ) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; в некоторых примерах сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40, может быть опционально включен в состав; положение дросселя (TP) с датчика положения дросселя; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122. Датчик 118 на эффекте Холла опционально может быть включен в двигатель 20, так как он действует в рабочем объеме, подобном лазерной системе двигателя, описанной в материалах настоящей заявки. Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими собой команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также их вариантов.
Лазерная система 92 включает в себя задающий генератор 88 лазерного излучения и блок 90 управления лазером (LCU). LCU 90 побуждает задающий генератор 88 лазерного излучения вырабатывать энергию лазерного излучения. LCU 90 может принимать операционные команды из контроллера 12. Задающий генератор 88 лазерного излучения включает в себя часть 86 лазерной накачки и часть 84 сведения излучения. Часть 84 ведения излучения сводит лазерное излучение, выработанное частью 86 накачки лазера, в фокусной точке 82 лазера цилиндра 30 сгорания.
Лазерная система 92 выполнена с возможностью работать в большем, чем один рабочий объем, с синхронизацией каждой операции на основании положения двигателя по четырехтактному циклу сгорания. Например, энергия лазерного излучения может использоваться для воспламенения топливовоздушной смеси во время рабочего такта двигателя, в том числе, во время проворачивания коленчатого вала двигателя, операции прогрева двигателя и работы прогретого двигателя. Топливо, впрыскиваемое топливной форсункой 66, может формировать топливовоздушную смесь во время по меньшей мере части такта впуска, где воспламенение топливовоздушной смеси энергией лазерного излучения, вырабатываемой задающим генератором 88 лазерного излучения, начинает сгорание негорючей в ином случае топливовоздушной смеси и вытесняет поршень 36 вниз. При второй работоспособности LCU 90 может подавать импульсы с низкой мощностью для определения положения поршня и клапанов во время четырехтактного цикла сгорания. Например, по возобновлению работы двигателя из условий останова двигателя при холостом ходе, энергия лазерного излучения может использоваться для контроля положения, скорости, и т.д., двигателя, для того чтобы синхронизировать подачу топлива и установку фаз газораспределения.
LCU 90 может управлять задающим генератором 88 лазерного излучения, чтобы фокусировать энергию лазерного излучения в разных местоположениях в зависимости от условий эксплуатации. Например, энергия лазерного излучения может фокусироваться в первом местоположении в стороне от стенки 32 цилиндра в пределах внутренней области цилиндра 30, для того чтобы воспламенять топливовоздушную смесь. В одном из вариантов осуществления первое местоположение может находиться возле верхней мертвой точки (ВМТ, TDC) рабочего такта. Кроме того, LCU 90 может направлять задающий генератор 88 лазерного излучения, чтобы вырабатывать первое множество импульсов лазерного излучения, направленных в первое местоположение, и первое сгорание от состояния покоя может принимать энергию лазерного излучения из задающего генератора 88 лазерного излучения, которая является большей, чем энергия лазерного излучения, выдаваемая в первое местоположение для более поздних сгораний.
Контроллер 12 управляет LCU 90 и имеет несъемный машинно-читаемый запоминающий носитель, включающий в себя машинную программу для настройки местоположения подачи энергии лазерного излучения на основании температуры, например ЕСТ. Энергия лазерного излучения может направляться в разные местоположения внутри цилиндра 30. Контроллер 12 также может заключать в себе дополнительные или альтернативные датчики для определения режима работы двигателя 20, в том числе дополнительные датчики температуры, датчики давления, датчики крутящего момента, а также датчики, которые выявляют частоту вращения двигателя, количество воздуха и величину впрыска топлива. Дополнительно или в качестве альтернативы, LCU 90 может поддерживать прямую связь с различными датчикам, такими как датчики температуры для выявления ЕСТ, для определения режима работы двигателя 20.
Как описано выше, фиг. 2 показывает один цилиндр многоцилиндрового двигателя, и каждый цилиндр может подобным образом включать в себя свой собственный набор впускных/выпускных клапанов, топливную форсунку, лазерную систему зажигания и т.д.
При отсутствии воспламенения топливовоздушной смеси на высокой мощности лазерная система 92 может испускать импульсы низкой мощности для точного измерения расстояния от верхней части цилиндра до поршня или, что касается CID, для определения, находятся ли впускные и/или выпускные клапаны в открытом или закрытом положении. Например два имеющихся в готовом виде лазерных изделия массового производства точно измеряют расстояния от 2 дюймов до более чем 100 футов с точностью в пределах 1/8 дюйма (Johnson Level & Tool Mfg. Col, Inc., Mequon, WI; and DeWalt Industrial Tool Col, Baltimore, MD). Фиг. 3а и 3b показывают примерные операции лазерной системы 92, которая включает в себя задающий генератор 88 лазерного излучения, систему 94 обнаружения и LCU 90. LCU 90 побуждает задающий генератор 88 лазерного излучения вырабатывать лазерный импульс низкой энергии, показанный под 302, который может направляться в направлении верхней поверхности 313 поршня 36. После испускания световая энергия может отражаться от поршня и детектироваться датчиком 94. LCU 90 может принимать операционные команды, такие как режим мощности, из контроллера 12. Например, во время воспламенения используемый лазерный импульс может подвергаться быстрой пульсации с высокой энергоемкостью, чтобы воспламенять топливовоздушную смесь. Наоборот, для определения положения двигателя, контроллер может управлять лазерной системой, чтобы раскачивать частоту с низкой энергоемкостью, чтобы определять положение поршня и идентифицировать одно или более положений клапана. Например, частотная модуляция лазера с периодически повторяющимся линейным изменением частоты может предоставлять возможность определения одного или более положений поршня в двигателе. Датчик 94 обнаружения может быть расположен в верхней части цилиндра в качестве части лазерной системы и может быть калиброван, чтобы принимать обратный импульс 304, отраженный от верхней поверхности 313 поршня 36.
Фиг. 3а и 3b иллюстрируют, каким образом лазерная система 92 может испускать импульсы в направлении поршня 36 в цилиндре 30, описанном выше со ссылкой на фиг. 2. Импульсы, испускаемые лазерной системой 92, например импульс 302, показанный на фиг. 3а, могут направляться в направлении верхней поверхности 313 поршня 36. Импульс 302 может отражаться от верхней поверхности поршня и обратный импульс, например импульс 304, может приниматься лазерной системой 92, который может использоваться для определения положения поршня 36 внутри цилиндра 30.
В некоторых примерах расположение поршня может определяться способами модуляции частоты f c использованием частотно модулированных лазерных пучков с периодически повторяющимся линейным изменением частоты. В качестве альтернативы, способы фазового сдвига могут использоваться для определения расстояния. Посредством обнаружения доплеровского сдвига или посредством сравнения образцовых положений в два разных момента времени, может логически выводиться информация о положении, скорости поршня и числе оборотов двигателя (измерение RPM). Положения впускного клапана 352 и/или выпускного клапана 354 также могут определяться с использованием лазерной системы. Когда CID комбинируется с положением поршня, положение двигателя может определяться и использоваться для синхронизации подачи топлива и установки фаз газораспределения. Такие позиционные состояния двигателя могут быть основаны на положениях поршней и CID, определенных посредством лазеров.
Контроллер 12, кроме того, может управлять LCU 90 и включать в себя постоянный машинно-читаемый запоминающий носитель, включающий в себя управляющую программу для настройки местоположения подачи энергии лазерного излучения на основании условий эксплуатации, например на основании положения поршня 36 относительно ВМТ. Контроллер 12 также может заключать в себе дополнительные или альтернативные датчики для определения режима работы двигателя 20, в том числе дополнительные датчики температуры, датчики давления, датчики крутящего момента, а также датчики, которые выявляют частоту вращения двигателя, количество воздуха и величину впрыска топлива, как описано выше со ссылкой на фиг. 2. Дополнительно или в качестве альтернативы, LCU 90 может непосредственно поддерживать связь с различными датчикам, такими как датчики 118 на эффекте Холла, чье включение в состав может быть необязательным, для определения режима работы двигателя 20.
Лазерная система может использоваться для измерения положения кулачков, например, посредством блокирования испускаемых импульсов во время определенных тактов цикла двигателя. Например, в одном из вариантов осуществления лазерная система 92 может быть расположена возле впускного клапана 352, таким образом, измерение положения поршня внутри цилиндра предотвращается во время такта впуска ездового цикла. Во время такта впуска клапан 352 открывается в камеру и блокирует испускаемые лазерные импульсы от отражения от верхней поверхности поршня 313. Например, на фиг. 3b, так как лазерная система 92 размещена в непосредственной близости от впускного клапана 352, когда цилиндр 30 находится в своем такте впуска, клапан 352 открывается в камеру и блокирует лазерный импульс, например лазерный импульс 306, от достижения верхней поверхности поршня 313. Контроллер 12 еще может быть запрограммирован для интерпретации детектированного сигнала, для того чтобы определять положения кулачков. Например, в этом примере контроллер может обрабатывать отсутствие сигнала, принятого датчиком 94, чтобы указывать, что впускной клапан 352 находится в открытом положении. Эта информация и геометрия двигателя могут дополнительно обрабатываться контроллером для определения положения двигателя в пределах его ездового цикла. Хотя фиг. 3b приводит пример того, каким образом испускаемый импульс может блокироваться впускным клапаном 352, возможны другие конфигурации. Например, лазерная система может быть расположена в непосредственной близости от выпускного клапана вместо впускного клапана. Когда размещена в этом местоположении, испускаемые импульсы, взамен, могут блокироваться во время такта выпуска ездового цикла. Контроллер может быть калиброван, чтобы учитывать такие различия. Как подробно описано ниже, контроллер 12 может обрабатывать данные, собранные во время ездового цикла, чтобы определять положение двигателя.
Разность по времени между испусканием светового импульса 302 и обнаружением отраженного светового импульса 304 детекторным датчиком 94 дополнительно может сравниваться с временным пороговым значением в качестве средства определения, произошло ли ухудшение характеристик лазерного устройства. Например, в двигателе внутреннего сгорания камера сгорания может быть в от трех до четырех дюймов в длину. На основании этой оценки и скорости света в вакууме (с=3,0×08 м/с), импульс света, испущенный лазерной системой 92, отраженный от верхней поверхности поршня 313, может детектироваться в пикосекундном временном диапазоне. Временное пороговое значение основательно за пределами пикосекундного временного диапазона (например, 1 наносекунды), поэтому может быть принято в качестве опорного значения для указания ухудшения характеристик лазерной системы. Например, импульс, испускаемый лазерной системой 92, чье обнаружение датчиком 94 занимает больше, чем 1 наносекунду, может указывать лазерную систему, потерявшую геометрическую точность.
В некоторых примерах система 20 двигателя может быть включена в транспортное средство, разработанное для выполнения останова двигателя при холостом ходе, когда удовлетворены условия останова двигателя при холостом ходе, и автоматического перезапуска двигателя, когда удовлетворены условия перезапуска. Такие системы останова двигателя при холостом ходе могут повышать экономию топлива, снижать выбросы в отработавших газах, шум и тому подобное. В таких двигателях работа двигателя может прекращаться в произвольном положении в пределах ездового цикла. По началу процесса для возобновления работы двигателя, лазерная система может использоваться для определения специфичного положения двигателя. На основании этой оценки лазерная система может производить определение в отношении того, какой цилиндр должен снабжаться топливом первым, для того чтобы начинать процесс возобновления работы двигателя из состояния покоя. В транспортных средствах, выполненных с возможностью выполнять операции останова двигателя при холостом ходе, в которых остановки и перезапуски двигателя повторяются много раз во время операции вождения, остановка двигателя в требуемом положении может предусматривать запуски с более высокой повторяемостью, и таким образом, лазерная система может использоваться для измерения положения двигателя во время выключения (после выведения из работы впрыска топлива, искрового зажигания и т.д.), в то время как двигатель прекращает вращение до состояния покоя, так что крутящий момент электродвигателя или другой момент сопротивления могут переменно прикладываться к двигателю в ответ на управление положением останова двигателя в требуемое положение останова.
В еще одном варианте осуществления, когда транспортное средство глушит свой двигатель, так как электродвигатель выключается, или так как транспортное средство решает работать в электрическом режиме, цилиндры двигателя могут в конечном счете останавливаться неуправляемым образом в отношении положения поршня 36 в цилиндре 30 сгорания и положений впускного клапана 352 и выпускного клапана 354. Для двигателя с четырьмя или более цилиндрами всегда может быть цилиндр, расположенный между закрыванием выпускного клапана (EVC) и закрыванием впускного клапана (IVC), когда коленчатый вал находится в состоянии покоя. Фиг. 4 показывает пример рядного четырехцилиндрового двигателя, способного к непосредственному впрыску топлива в камеру, остановленного в произвольном положении в своем ездовом цикле, и каким образом лазерная система зажигания может выдавать измерения, которые могут сравниваться между цилиндрами для идентификации потенциально возможного ухудшения характеристик. Будет принято во внимание, что примерное положение двигателя, показанное на фиг. 4, является примерным по природе, и что возможны другие положения двигателя.
Врезка на фигуре под 412 является схемой примерного блока 402 цилиндров рядного двигателя. В пределах блока находятся четыре отдельных цилиндра, где цилиндры 1-4 помечены 404, 406, 408 и 410 соответственно. Виды в поперечном разрезе цилиндров показаны скомпонованными согласно своему порядку работы цилиндров в примерном ездовом цикле, показанном на 415. В этом примере положение двигателя является таким, что цилиндр 404 находится в такте выпуска ездового цикла. Выпускной клапан 413, поэтому, находится в открытом положении, а впускной клапан 414 закрыт. Так как цилиндр 408 работает последним в цикле, он находится в своем рабочем такте и, таким образом, выпускной клапан 416 и впускной клапан 418 находятся в закрытом положении. Поршень в цилиндре 408 расположен около НМТ. Цилиндр 410 находится в такте сжатия и, таким образом, выпускной клапан 420 и впускной клапан 422 также оба находятся в закрытом положении. В этом примере цилиндр 406 работает последним, поэтому находится в положении такта впуска. Соответственно, выпускной клапан 424 закрыт наряду с тем, что впускной клапан 426 открыт.
Каждый отдельный цилиндр в двигателе может включать в себя лазерную систему, присоединенную к нему, как показано на фиг. 2, описанной выше, на которой лазерная система 92 присоединена к цилиндру 30. Эти лазерные системы могут использоваться как для зажигания в цилиндре, так и определения положения поршней и кулачков в пределах цилиндра, как описано в материалах настоящей заявки. Например, фиг. 4 показывает лазерную систему 451, присоединенную к цилиндру 404, лазерную систему 453, присоединенную к цилиндру 408, лазерную систему 457, присоединенную к цилиндру 410, и лазерную систему 461, присоединенную к цилиндру 406.
Как описано выше, лазерная система может использоваться для измерения положений клапанов, а также положения поршня внутри камеры цилиндра. Например, в положении двигателя, показанном на фиг. 3b, свет из лазерной системы 92 может по меньшей мере частично блокироваться от достижения верхней части поршня 313 в цилиндре 30. Так как количество отраженного света уменьшено по сравнению с количеством света, отраженного от верхней поверхности поршня, когда испускаемые импульсы не блокируются, контроллер 12 может быть запрограммирован учитывать такие отличия и использовать информацию для определения, что впускной клапан 352 открыт. На основании очередности действий клапанов в пределах ездового цикла, контроллер 12 дополнительно определяет, что выпускной клапан 354 закрыт. Так как приведенный пример основан на четырехцилиндровом двигателе, один из цилиндров всегда будет находиться в такте впуска. По существу, контроллер может быть запрограммирован обрабатывать данные из всех лазерных систем, для того чтобы идентифицировать цилиндр в его такте впуска. На основании этого определения и использования геометрии двигателя положение двигателя может идентифицироваться с использованием лазерных систем. В качестве альтернативы, как будет подробнее описано ниже, контроллер также может быть запрограммирован обрабатывать последовательность измерений из одиночного лазерного детектора, присоединенного к цилиндру, в качестве средства идентификации положения двигателя.
Положения поршней в цилиндре могут измеряться относительно любых пригодных опорных точек и могут использовать любые пригодные масштабные коэффициенты. Например, положение цилиндра может измеряться относительно положения ВМТ цилиндра и/или положения НМТ цилиндра. Например, фиг. 4 показывает линию 428 через поперечные сечения цилиндров в положении НМТ и линию 430 через поперечные сечения цилиндров в положении ВМТ. Хотя множество опорных точек и масштабов могут быть возможными во время определения положения поршня, примеры, показанные здесь, основаны на расположении поршня внутри камеры. Например, может использоваться масштаб, используемый в измеренном смещении, сравниваемом с известными положениями внутри камеры. Другими словами, расстояние от верхней поверхности поршня, показанного под 432 на фиг. 4, относительно положения ВМТ, показанного под 428, и положения НМТ, показанного под 430, может использоваться для определения относительного положения поршня в цилиндре. Ради простоты показан образцовый масштаб, калиброванный для расстояния от лазерной системы до поршня. В этом масштабе, начало 428 отсчета представлено в качестве X (причем, Х=0 соответствует ВМТ), а расположение 430 поршня, самое дальнее от лазерной системы, соответствующее максимальному линейному расстоянию, пройденному поршнем, представлено в качестве xmax (причем, Х=xmax соответствует НМТ). Например, на фиг. 4, расстояние 471 от ВМТ 428 (которая может быть взята в качестве начала отсчета) до верхней поверхности 432 поршня в цилиндре 404 может быть по существу таким же, как расстояние 432 от ВМТ 428 до верхней поверхности 432 поршня в цилиндре 410. Расстояния 471 и 432 могут быть меньшими (относительно ВМТ 428), чем расстояния 473 и 477 от ВМТ 428 до верхних поверхностей поршней в цилиндрах 408 и 406, соответственно.
Поршни могут работать циклически, и таким образом, их положения внутри камеры могут быть связаны через единый показатель относительно ВМТ и/или НМТ. В целом, это расстояние, 432 на фигуре, может быть представлено в качестве ΔХ. Лазерная система может измерять эту переменную для каждого поршня в пределах его цилиндра, а затем, использовать информацию для определения, должно ли выполняться дополнительное действие. Например, лазерная система могла бы отправлять сигнал в контроллер, указывающий ухудшение характеристик двигателя сверх допустимого порогового значения, если переменная отличается на пороговую величину среди двух или более цилиндров. В этом примере контроллер может интерпретировать управляющую программу в качестве диагностического сигнала и вырабатывать сообщение, указывающее, что произошло ухудшение характеристик. Понятно, что переменная X должна представлять множество показателей, которые могут измеряться системой, один из примеров которых описан выше. Приведенный пример основан на расстоянии, измеренном лазерной системой, которое может использоваться для идентификации расположения поршня внутри его цилиндра.
Со ссылкой на фиг. 4, контроллер может быть запрограммирован определять положение двигателя с использованием различных способов. Например, контроллер может быть запрограммирован обрабатывать последовательность данных, собранных из одиночной лазерной системы, например лазерной системы 461 в цилиндре 406, чтобы определять положение двигателя. Примерная многомерная характеристика лазерной системы, работающей в двух режимах низкой мощности для определения установки фаз газораспределения и положения поршня в отношении положения двигателя во время примерного цикла двигателя, показана на фиг. 5 и описана ниже. В качестве альтернативы, контроллер может быть запрограммирован обрабатывать данные, собранные из двух или более лазерных систем, для определения положения двигателя. Фиг. 6-7 показывают примерные многомерные характеристики установки фаз газораспределения и положения поршня относительно положения двигателя во время примерного цикла двигателя для обоих двигателей, с непосредственным впрыском топлива во впускные каналы.
Фиг. 5 показывает график 500 примерные установку фаз газораспределения и положение поршня в отношении положения двигателя (градусов угла поворота кривошипа) в пределах четырех тактов (впуска, сжатия, рабочего и выпуска) цикла двигателя для четырехцилиндрового двигателя с порядком работы цилиндров 1-3-4-2. На основании критериев для выбора первого работающего цилиндра, контроллер двигателя может быть выполнен с возможностью идентифицировать области, в которых может быть расположен первый рабочий цилиндр, на основании положения двигателя, измеренного отраженными лазерными импульсами с помощью поршня, как описано в материалах настоящей заявки.
На фиг. 5 график 500 показывает кривые установки фаз распределения впускных клапанов и положения поршней наряду с двумя примерными режимами детектирования лазерной системы. Для определения положения двигателя лазерная система, например лазерная система 461, присоединенная к цилиндру 406 на фиг. 4, может испускать последовательность импульсов низкой мощности на всем протяжении цикла двигателя, но детектировать два разных световых сигнала на основании положения клапанов и поршня внутри цилиндра. Со ссылкой на пример, показанный на фиг. 4, лазерная система 461 может детектировать световую энергию, отраженную от верхней поверхности поршня во время тактов сжатия, рабочего и выпуска ездового цикла, когда впускной клапан закрыт. В дальнейшем, этот режим детектирования, показанный под 506 на фиг. 5, называется режим 1 детектирования низкой мощности (или LD1). Несмотря на то что лазерный детектор считывает световую энергию, отраженную от верхней части поршня в LD1, он может не считывать положение впускного клапана 426 относительно выпускного клапана 424. Наоборот, когда цилиндр двигателя входит в такт впуска ездового цикла, лазерный детектор 461 может детектировать ослабленный сигнал, поскольку его испускание по меньшей мере частично блокируется открытым впускным клапаном. Этот режим детектирования показан на 508 и называется режим 2 детектирования низкой мощности (или LD2). В то время как в LD2, лазерный детектор, например, может считывать положение впускного клапана, но не положение поршня внутри камеры цилиндра. Поскольку определение положения двигателя производится как по CID, так и положению поршней, во время этого режима, контроллер может обрабатывать информацию из второй лазерной системы, например лазерной системы 457, присоединенной к цилиндру 410, чтобы измерять положение поршня внутри цилиндра. Контроллер затем может использовать эту информацию и геометрию двигателя для идентификации положения двигателя.
На 502 профиль подъема клапана показан для впускного клапана 426. В начале такта впуска профиль показывает, что клапан открывается, а затем закрывается, в то время как поршень перемещается из ВМТ в НМТ. Хотя профиль подъема клапана не показан для выпускного клапана, например выпускного клапана 424, подобный профиль опционально может быть включен в состав, чтобы показать, что выпускной клапан открывается, а затем закрывается, в то время как поршень перемещается из НМТ в ВМТ во время такта выпуска ездового цикла двигателя.
На 504 циклическая природа поршня показана для четырех тактов ездового цикла. Например, поршень постепенно перемещается вниз от ВМТ, доходя до низшей точки в НМТ к концу такта впуска. Поршень затем возвращается вверх, в ВМТ, к концу такта сжатия. Поршень затем вновь перемещается обратно вниз, по направлению к НМТ, в течение рабочего такта, возвращаясь в свое исходное верхнее положение в ВМТ к концу такта выпуска. Как изображено, многомерная характеристика иллюстрирует положение двигателя по оси х в градусах угла поворота коленчатого вала (CAD). Для приведенной примерной кривой, положение поршня не показано во время такта впуска, чтобы проиллюстрировать сигнал, ослабляемый вследствие существенно блокированных лазерных импульсов (например, блокированных на более чем 90%).
Последовательность данных, собранных лазерной системой 461, может использоваться для идентификации положения двигателя. Например, рассмотрим двигатель, остановленный с цилиндром 406, расположенным в положении Р1. Это, например, может происходить, когда транспортное средство с остановом двигателя при холостом ходе переключает режимы двигателя в электрический режим работы или режим работы содействия транспортному средству. После того, как контроллер отправляет сигнал для останова двигателя, например, отправляя электрический сигнал на дроссельный клапан, указывая, чтобы он закрывался, поток воздуха в цилиндр может ограничиваться, для того чтобы останавливать двигатель. В ответ, двигатель может осуществлять зажигание в еще нескольких циклах до прихода к остановке в Р1. Чтобы синхронизировать подачу топлива и установку фаз газораспределения перед повторным включением двигателя во время процесса возобновления работы двигателя, контроллер 12 затем может определять положение двигателя.
Образцовые наборы данных показаны на 510 и 512, чтобы иллюстрировать, каким образом разные наборы данных могут собираться лазерной системой и использоваться для идентификации положения двигателя в пределах ездового цикла. Например, лазерная система 461 может начинать сбор данных в ответ на команду остановки двигателя, по мере того как двигатель завершает свои последние несколько циклов перед приходом в состояние покоя в положении Р1. Так как Р1 расположено в такте впуска, 510 показывает, что сигнал, собранный лазерным детектором, может нарушаться впускным клапаном. По мере того, как клапан открывается, испускаемый импульс по меньшей мере частично блокируется, что может давать в результате существенно ослабленный сигнал. Контроллер 12 может обрабатывать этот сигнал, чтобы идентифицировать открытый впускной клапан и использовать лазерную систему, присоединенную к другому цилиндру, например лазерную систему 457, для измерения положения ее поршня. Геометрия двигателя в таком случае может использоваться для связывания всех из переменных в качестве средства идентификации положения двигателя.
Так как действие ездового цикла двигателя является циклическим по природе, во время определенных частей ездового цикла, второй набор данных может быть по существу идентичным показанному на 510. Чтобы отличать эти две области друг от друга и однозначно идентифицировать положение двигателя, контроллер может быть запрограммирован для обработки последовательности данных, чтобы определять положение двигателя по форме кривой. На 512 показана вторая кривая, по мере того как поршень в цилиндре 406 приближается к ВМТ во время такта сжатия ездового цикла. Однако, так как впускной клапан остается закрытым во время обоих тактов, сжатия и рабочего, никакого блокирования лазерного сигнала не происходит, и детектируется гладкий набор данных. Контроллер может быть запрограммирован обрабатывать такие данные и использовать форму кривой наряду с геометрией двигателя, чтобы идентифицировать положение двигателя. Как только определено положение двигателя, может идентифицироваться следующий работающий цилиндр и планироваться синхронизация подачи топлива и установка фаз газораспределения.
В качестве альтернативы, контроллер может быть запрограммирован обрабатывать информацию из многочисленных лазерных систем, для того чтобы определять положение двигателя. Например, на фиг. 6 показаны профили установки фаз газораспределения и положения поршня в отношении положения двигателя, показанного на фиг. 4. Два рабочих состояния лазера также показаны со ссылкой на фиг. 5, чтобы проиллюстрировать, каким образом многочисленные лазерные системы могут использоваться для определения положения двигателя.
На 602 показаны профили подъема впускных клапанов во время нормальной работы двигателя. Впускной клапан может открываться в или раньше начала такта впуска и может оставаться открытым по меньшей мере до тех пор, пока не начался следующий такт сжатия. Как описано выше со ссылкой на фиг. 2-5, контроллер 12 двигателя может быть выполнен с возможностью идентифицировать первый работающий цилиндр, в котором следует инициировать сгорание во время возобновления работы двигателя из условий останова двигателя при холостом ходе. Например, как описано выше на фиг. 4, первый работающий цилиндр может определяться с использованием лазерной системы, чтобы измерять положение клапанов и расположение поршня в цилиндре в качестве средства определения положения двигателя. Пример, показанный на фиг. 6, относится к двигателю с непосредственным впрыском (DI), при этом первый работающий цилиндр может выбираться расположенным после EVC, но до последующего открывания выпускного клапана (EVO) (как только идентифицировано положение двигателя, и идентифицировано, что положение поршня синхронизировано с распределительным валом). Для сравнения, фиг. 7 показывает первый работающий цилиндр двигателя с впрыском топлива во впускные каналы (PFI), при этом первый работающий цилиндр может выбираться расположенным до IVC.
Фиг. 6 в материалах настоящей заявки ссылается на фиг. 4, чтобы дополнительно конкретизировать, каким образом производится определение в отношении того, какой цилиндр работает первым при возобновлении работы двигателя, и каким образом лазер может координировать временные характеристики разных режимов мощности в пределах четырех тактов ездового цикла. Для примерной конфигурации, показанной на фиг. 4, положение двигателя может выявляться лазерной системой на линии Р1, показанной на фиг. 6. В этом примере на Р1, цилиндр 404 находится в такте выпуска. Соответственно, для этой примерной системы двигателя, цилиндр 408 находится в рабочем такте, цилиндр 410 находится в такте сжатия, а цилиндр 406 находится в такте впуска. Вообще, до того, как двигатель начинает процесс возобновления работы, одна или более лазерных систем могут зажигать импульсы низкой мощности, показанные под 610 и 612 на фиг. 6, чтобы определять положение двигателя. Например, лазерные импульсы 610 могут зажигаться на верхней поверхности поршней внутри их цилиндров. Так как оба клапана закрыты в цилиндрах, где указан импульс 610, лазерные системы выявляют положение поршня внутри камеры цилиндра (LD1 на фиг. 5). Наоборот, так как впускной клапан 426 открыт в цилиндре 406, испускание лазерного импульса 612 по меньшей мере частично блокируется открытым клапаном. Лазерный детектор в этом цилиндре, таким образом, может обрабатывать существенно ослабленный сигнал, для того чтобы распознавать открытый впускной клапан внутри цилиндра (LD2 на фиг. 5). Контроллер 12 затем может использовать эту информацию и данные положения поршней из других лазерных систем детектирования, например лазерных систем 451, 453 и 457 на фиг. 4, присоединенных к цилиндрам 404, 408 и 410, соответственно, чтобы определять положение двигателя. Кроме того, поскольку в этом примере используется двигатель с DI, топливо может впрыскиваться в камеру цилиндра после открывания впускного клапана (IVO). Профиль впрыска задан посредством 604-607. Например, прямоугольники под 604 на фиг. 6 показывают, когда топливо впрыскивается в цилиндр 404, прямоугольники 605 показывают, когда топливо впрыскивается в цилиндр 408, прямоугольники 606 показывают, когда топливо впрыскивается в цилиндр 410, и прямоугольник 607 показывает, когда топливо впрыскивается в цилиндр 406, во время примерного цикла двигателя, показанного на фиг. 6.
Когда цилиндр был идентифицирован в качестве следующего работающего цилиндра, после того, как топливовоздушная смесь была введена в цилиндр, и ассоциативно связанный поршень испытал сжатие, лазер, присоединенный к идентифицированному следующему работающему цилиндру, может формировать импульс высокой мощности, чтобы воспламенять топливовоздушную смесь в цилиндре для вызова рабочего такта. Например, на фиг. 6, после впрыска 604 топлива в цилиндр 404 лазерная система, например лазерная система 451, вырабатывает импульс высокой мощности на 616, чтобы воспламенять топливо в цилиндре. Подобным образом, цилиндр 408, который является следующим в последовательности работы цилиндров после цилиндра 404, принимает импульс 618 высокой мощности из лазерной системы, например лазерной системы 453, чтобы воспламенять топливо, впрыснутое на 605 в цилиндр 408. Следующий работающий цилиндр после цилиндра 408 является цилиндром 410, который принимает последующий импульс 620 высокой мощности из лазерной системы, например, лазерной системы 457, чтобы воспламенять топливо, впрыснутое на 606 в цилиндр 410, и так далее.
На фиг. 7 примерный профиль двигателя с PFI, подобный показанному на фиг. 6 для двигателя с DI, предоставлен для сравнения. Одно из различий между двигателем с DI и двигателем с PFI относится к тому, впрыскивается ли топливо непосредственно в камеру или впрыскивается ли топливо во впускной коллектор для предварительного смешивания с воздухом перед поступлением в камеру сгорания. В системе с DI, показанной на фиг. 2-4, воздух вводится непосредственно в камеру и, таким образом, смешивается с воздухом во время такта впуска двигателя. Система с PFI, в качестве альтернативы, впрыскивает топливо во впускной коллектор во время такта выпуска, поэтому воздух и топливо предварительно смешиваются перед впрыском в камеру цилиндра. Вследствие этого различия контроллер двигателя может отправлять разный набор команд в зависимости от типа системы впрыска топлива, представленной в системе.
В профиле двигателя с PFI, показанном на фиг. 7, перед моментом Р1 времени, одна или более лазерных систем могут зажигать импульсы 610 и 612 низкой мощности для определения положения двигателя. Так как двигатель представляет собой PFI, топливо может впрыскиваться во впускной коллектор до IVO. В момент Р1 времени, контроллер идентифицировал положение поршней двигателя посредством лазерных измерений и идентифицировал положение распределительного вала, так что может планироваться синхронизированная подача топлива. На основании количества топлива, которое должно подаваться, контроллер может идентифицировать следующий цилиндр, который должен снабжаться топливом до IVO, так чтобы мог обеспечиваться впрыск топлива с впрыском во впускные каналы при закрытом клапане. Профили впрыска показаны под 702-704 на фиг. 7.
Например, со ссылкой на фиг. 4, но в отношении двигателя с PFI вместо двигателя с DI, прямоугольник под 702 показывает, когда топливо может впрыскиваться во впускной коллектор (в целом показанный как 45 на фиг. 2 и 3) первого работающего цилиндра после возобновления работы двигателя. Как показано посредством фиг. 7, цилиндр 408 является следующим цилиндром, который может снабжаться топливом, и таким образом, впрыск 702 топлива планируется, из условия чтобы цилиндр 408 был первым цилиндром для работы от состояния покоя, когда подвергается воспламенению посредством импульса 706 лазерного зажигания. При возобновлении работы, поскольку цилиндр 410 является следующим в последовательности работы цилиндров, впрыск 703 топлива может происходить согласно последовательности до IVO. До EVO, импульс 708 высокой мощности может подаваться из лазерной системы 457 для воспламенения смеси. Следующий работающий цилиндр в последовательности является цилиндром 406, который впоследствии впрыскивает топливо 704 до IVO. Хотя не показано, лазерный импульс с высокой мощностью из лазерной системы 461 может использоваться для воспламенения этой топливовоздушной смеси. Величина впрыска топлива может постепенно уменьшаться на основании счета сгораний от первого события сгорания в цилиндре.
Далее, с обращением к фиг. 8, показан примерный способ 800 для выполнения различных бортовых диагностических программ во время работы двигателя при ездовом цикле транспортного средства.
На 802 условия эксплуатации транспортного средства могут оцениваться и/или логически выводиться. Как описано выше, система 12 управления может принимать обратную связь датчика с одного или более датчиков, ассоциативно связанных с компонентами силовой установки транспортного средства, например, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха, температуры охлаждающей жидкости двигателя (ЕСТ), положения дросселя (TP) и т.д. Оцениваемые условия эксплуатации, например, могут включать в себя указание запрошенных водителем транспортного средства выходной мощности или крутящего момента (например, на основании положения педали), уровня топлива в топливном баке, нормы потребления топлива двигателя, температуры двигателя, состояния заряда (SOC) бортового устройства накопления энергии, условий окружающей среды, в том числе, влажности и температуры, температуры охлаждающей жидкости двигателя, запроса автоматического управления климатом (например, запросов кондиционирования воздуха или отопления).
На 804, на основании оцененных условий эксплуатации транспортного средства, может выбираться режим работы транспортного средства. Например, может определяться, следует ли эксплуатировать транспортное средство в электрическом режиме (с транспортным средством, перемещаемым с использованием энергии из бортового устройства накопления энергии системы, такого как аккумуляторная батарея), или режиме двигателя (с транспортным средством, перемещаемым с использованием энергии из двигателя), либо режиме содействия (с транспортным средством, перемещаемым с использованием по меньшей мере некоторой энергии из аккумуляторной батареи и по меньшей мере некоторой энергии из двигателя).
На 806 способ 800 включает в себя определение, следует или нет эксплуатировать транспортное средство в электрическом режиме. Например, если период времени, который двигатель работал на холостом ходу, является большим, чем пороговое значение, контроллер может опционально определять, что транспортное средство должно эксплуатироваться в электрическом режиме. В качестве альтернативы, если запрос крутящего момента двигателя является меньшим, чем пороговое значение, транспортное средство может переключаться на электрический режим работы.
Если способ 800 определяет, что транспортное средство должно эксплуатироваться в электрическом режиме на 806, то способ 800 переходит на 808. На 808 способ 800 включает в себя эксплуатацию транспортного средства в электрическом режиме с аккумуляторной батареей системы, используемой для приведения в движение транспортного средства и удовлетворения водительских требований крутящего момента. В некоторых примерах, даже если электрический режим выбран на 808, программа может продолжать контролировать требование крутящего момента транспортного средства и другие условия эксплуатации транспортного средства, чтобы выяснять, должно ли выполняться быстрое переключение в режим двигателя (или режим содействия двигателя). Более точно, в то время как в электрическом режиме, на 810, контроллер может определять, запрошено ли переключение в режим двигателя.
Однако, если на 806 определено, что транспортное средство не должно эксплуатироваться в электрическом режиме, то способ 800 переходит на 812. На 812 транспортное средство может эксплуатироваться в режиме двигателя с двигателем, используемым для приведения в движение транспортного средства и удовлетворения водительских требований крутящего момента. В качестве альтернативы, транспортное средство может работать в режиме содействия (непоказанном) с приведением в движение транспортного средства вследствие по меньшей мере некоторого количества энергии из аккумуляторной батареи и некоторого количества энергии из двигателя.
Если режим двигателя запрошен на 812 или если переключение с электрического режима на режим двигателя происходит на 810, 814 показывает, что транспортное средство может запускать или перезапускать двигатель. Примерный способ 900 для запуска или перезапуска двигателя во время действия ездового цикла транспортного средства показан на фиг. 9.
На 902 способ 900 включает в себя определение, должен ли выполняться холодный запуск двигателя. Например, холодный запуск двигателя может подтверждаться в ответ на запуск двигателя из состояния покоя, когда розжиговый каталитический нейтрализатор отработавших газов находится ниже пороговой температуры (например, температуры розжига), или в то время как температура двигателя (в качестве логически выведенной из температуры охлаждающей жидкости двигателя) находится ниже пороговой температуры. В одном из примеров первый запуск двигателя во время ездового цикла может быть холодным запуском. То есть, когда двигатель запускается, чтобы инициировать работу транспортного средства в режиме двигателя, первое количество событий сгорания двигателя от состояния покоя до проворачивания коленчатого вала может происходить при более низкой температуре и может составлять холодный запуск. В еще одном примере транспортное средство может запускаться в электрическом режиме, а затем переключается в режим двигателя. В материалах настоящей заявки первый запуск двигателя во время перехода из электрического режима в режим двигателя, в данном ездовом цикле транспортного средства, может быть холодным запуском.
Если холодный запуск двигателя подтвержден на 902, способ 900 переходит на 908 для включения стартера двигателя. Например, контроллер двигателя может отправлять сигнал на стартер в качестве средства начинания пусковых действий. В некоторых вариантах осуществления стартер двигателя может быть включен в состав опционально, поскольку по меньшей мере один поршень всегда расположен в начале рабочего такта в ездовом цикле. В отношении этих транспортных средств, контроллер может использовать лазерную систему, присоединенную к цилиндру, для идентификации следующего работающего цилиндра и начинать возобновление работы двигателя посредством впрыска топлива непосредственно в цилиндр для воспламенения.
На 910 способ 900 включает в себя определение положения двигателя. Например, на основании выбранных критериев контроллер двигателя может быть выполнен с возможностью определять положение двигателя, для того чтобы идентифицировать положение первого работающего цилиндра, чтобы инициировать сгорание во время ввода в действие двигателя. Например, как описано выше, каждый цилиндр может быть присоединен к лазерной системе, способной к выработке оптического сигнала высокой или низкой энергии. При работе в режиме высокой энергии лазер может использоваться в качестве системы зажигания, чтобы воспламенять топливовоздушную смесь. В некоторых примерах режим высокой энергии также может использоваться для подогрева цилиндра, для того чтобы снижать трение в цилиндре. При работе в режиме низкой энергии лазерная система, которая также содержит в себе устройство обнаружения, способное к захвату отраженного света, может использоваться для определения положений клапанов в пределах цилиндра в дополнение к положению поршня. Например, положение впускного клапана 352 и выпускного клапана 354 может определяться лазерной системой 92. В некоторых вариантах осуществления каждый цилиндр двигателя 20 может включать в себя по меньшей мере два впускных тарельчатых клапана и по меньшей мере два выпускных тарельчатых клапана, расположенных в верхней области цилиндра. Двигатель дополнительно может включать в себя датчик положения кулачка, чьи данные могут объединяться с датчиком лазерной системы для определения положения двигателя и установки фаз кулачкового распределения. Во время некоторых режимов работы, например, когда двигатель является работающим, отраженный свет может создавать другие полезные оптические сигналы. Например, когда свет из лазерной системы отражается от движущегося поршня, он будет иметь иную частоту относительно исходного испускаемого света. Этот обнаруживаемый частотный сдвиг известен как эффект Доплера и имеет известную зависимость от скорости поршня. Положение и скорость поршня могут использоваться для координации установки момента событий зажигания и впрыска топливовоздушной смеси. Информация о положении также может использоваться для определения, какой цилиндр работает первым во время пусковых действий.
На 912 способ 900 включает в себя идентификацию, какой цилиндр в цикле должен работать первым. Например, информация о положении поршня и клапанов может обрабатываться контроллером, для того чтобы определять, где двигатель находится в своем ездовом цикле. Как только положение двигателя было определено, контроллер может идентифицировать, какой цилиндр должен первым осуществлять зажигание при возобновлении работы.
На 914 способ 900 включает в себя планирование впрыска топлива и настройку впрыска топлива на основании определенного положения двигателя. Например, контроллер может обрабатывать информацию о положении двигателя и установке фаз кулачкового распределения для планирования, чтобы следующий цилиндр подвергался впрыску топлива в ездовом цикле. На 916 способ 900 включает в себя планирование воспламенения топлива. Например, как только впрыск топлива был запланирован для следующего цилиндра в последовательности зажигания, контроллер впоследствии может планировать воспламенение топливовоздушной смеси лазерной системой, присоединенной к следующему работающему цилиндру, для того чтобы начинать работу двигателя.
Возвращаясь на 902, если холодный запуск двигателя не подтвержден, программа переходит на 904, чтобы определять, присутствует ли горячий запуск двигателя. Например, горячий запуск двигателя может подтверждаться в ответ на запуск двигателя из состояния покоя, когда розжиговый каталитический нейтрализатор отработавших газов находится на или выше пороговой температуры (например, температуры розжига), или в то время как температура двигателя (в качестве логически выведенной из температуры охлаждающей жидкости двигателя) находится на или выше пороговой температуры. В одном из примеров, двигатель может запускаться, чтобы инициировать эксплуатацию транспортного средства в режиме двигателя, а через некоторую длительность работы транспортного средства двигатель может временно останавливаться, чтобы выполнять останов двигателя при холостом ходе или продолжать эксплуатацию транспортного средства в электрическом режиме. Затем, через некоторую длительность работы в электрическом режиме, или когда удовлетворены условия перезапуска из останова двигателя при холостом ходе, двигатель может перезапускаться (например, из состояния покоя), чтобы повторно инициировать работу транспортного средства в режиме двигателя. Во время этих условий, первое количество событий сгорания двигателя от состояния покоя до проворачивания коленчатого вала может происходить при более высокой температуре (вследствие предшествующей работы двигателя) и может составлять горячий запуск.
Если горячий запуск не подтвержден на 904 на основании информации, принятой из систем управления, способ 900 переходит на 906, чтобы продолжать эксплуатацию двигателя. Например, в ответ на определение, что силовая установка транспортного средства является функционирующей в режиме двигателя, эксплуатация двигателя может продолжать контролироваться во время ездового цикла транспортного средства.
Фиг. 10 показывает примерный способ 1000 для эксплуатации лазерной системы 92 в двух режимах мощности на основании рабочего состояния двигателя 20 внутреннего сгорания. Как показано в примерном способе по фиг. 10, лазерная система может работать в двух режимах мощности. Например, лазерная система зажигания, присоединенная к цилиндру, может работать в режиме низкой мощности, чтобы измерять CID и положение, скорость поршня и т.д., и режиме высокой мощности, чтобы воспламенять топливовоздушную смесь, впрыснутую в камеру 30 сгорания. В показанном варианте осуществления контроллер может использоваться для определения, где двигатель находится в своем ездовом цикле. После обработки информации о положении двигателя, сигнал может отправляться в лазерную систему, для того чтобы сообщать эту информацию. Сигнал может быть электрическим по природе, или он может отправляться с помощью оптического, механического или некоторого другого средства.
На 1002 способ 1000 включает в себя использование по меньшей мере одной лазерной системы для контроля положения двигателя. Например, на фиг. 4 лазерная система 451 может использоваться для определения положения впускного клапана 414 и/или положения выпускного клапана 412 в дополнение к положению поршня в цилиндре 404.
На 1004 способ 1000 включает в себя определение, должно ли выполняться лазерное зажигание. Например, лазерная система 92 может принимать информацию из контроллера и использовать ее для определения, какой режим работы следует использовать.
Если на 1004 определено, что должно выполняться лазерное зажигание, то способ 1000 переходит на 1006. На 1006 способ 1000 включает в себя генерирование импульсов лазерного излучения в режиме высокой мощности в цилиндре двигателя. Как описано выше со ссылкой на фиг. 2-4, контроллер двигателя может быть выполнен с возможностью идентифицировать первый работающий цилиндр, в котором следует инициировать сгорание во время возобновления работы двигателя из условий останова двигателя при холостом ходе. Например, если контроллер 12 определяет, что импульс с высокой мощностью должен подаваться в камеру 404 цилиндра, на 1006, лазерная система 88 может вырабатывать импульс высокой энергии, чтобы воспламенять топливовоздушную смесь в такой камере. После возобновления работы двигателя лазерная система затем может использоваться для контроля положения двигателя.
Однако, если определено, что лазерное зажигание не должно выполняться на 1004, то способ 1000 переходит на 1008. На 1008 способ 1000 включает в себя определение, запрошено ли положение поршня. Например, если контроллер 12 определяет, что импульс высокой энергии необязателен, на 1008, он может опционально решать, должна ли лазерная система вырабатывать импульсы низкой энергии для измерения, например, положения двигателя перед возобновлением работы из условий холодного запуска.
Если запрошено измерение положения двигателя на 1008, то способ 1000 переходит на 1010. Например, на 1010, импульс низкого давления может подаваться лазерной системой 451 для определения положений кулачков и поршня в пределах цилиндра 404. Подобным образом, лазерные системы 453, 457 и 461 также могут подавать импульсы с низкой мощностью для определения положений кулачков и поршней в пределах цилиндров 408, 410 и 406, соответственно.
На 1012 способ 1000 включает в себя использование лазерной системы для определения информации о положении для поршня внутри его цилиндра. Например, расположение поршня может определяться способами модуляции частоты f c использованием частотно модулированных лазерных пучков с периодически повторяющимся линейным изменением частоты.
На 1014 способ 1000 включает в себя использование лазерной системы для определения информации о положении для впускного и выпускного клапанов с использованием измерений освещения клапанов. Например, в примере, показанном на фиг. 5, контроллер 12 обрабатывал данные, собранные лазерной системой 461 во время ездового цикла двигателя, чтобы определять, чтобы впускной клапан 424 был открыт. Контроллер дополнительно определял, что выпускной клапан 426 был закрыт, например, на основании операций двигателя во время ездового цикла. То есть, если впускной клапан открыт, выпускной клапан закрыт.
На 1016 способ 1000 включает в себя использование информации о положении кулачков и поршней для определения положения двигателя. Например, на фиг. 6, контроллер 12 двигателя выполнял последовательность вычислений для расчета положения двигателя на основании данных, принятых из многочисленных лазерных систем. Собранные данные дополнительно могут обрабатываться для расчета другой информации о системе, например, угла поворота кривошипа коленчатого вала 40. В качестве альтернативы, контроллер может использовать положение двигателя, чтобы гарантировать, что подача топлива в пределах двигателя синхронизирована.
На 1018 способ 1000 включает в себя идентификацию, какой цилиндр в цикле должен работать первым. Например, в описании по фиг. 6-7, контроллер использовал лазерные системы для измерения положений кулачков и поршней в пределах их цилиндров. Эта информация затем использовалась для определения положения двигателя. По идентифицированному положению двигателя, контроллер был способен идентифицировать и планировать, чтобы работал следующий цилиндр в ездовом цикле.
На 1020 способ 1000 включает в себя определение, должен ли продолжаться контроль двигателя с помощью лазера. Как только следующий работающий цилиндр был идентифицирован, контроллер может определять, контролируются ли характеристики двигателя лазерными системами. Если контроллер решает не использовать лазерные системы для контроля положения двигателя, на 1022, контроллер, например, опционально может использовать датчики 118 положения коленчатого вала или датчики 55 и 57 положения кулачков, для того чтобы контролировать положение двигателя.
Фиг. 11 показывает примерный способ 1100 для синхронизации подачи топлива на основании детектирования разных сигналов в пределах ездового цикла. Способ 1100, например, может выполняться системой 41 управления. Способ включает в себя использование лазерной системы в режиме низкой мощности, чтобы контролировать положение двигателя. Лазерная система дополнительно может включать в себя датчики для определения положения поршня в цилиндре и/или датчики для идентификации положений клапанов в ездовом цикле двигателя. Данные, собранные во время различных тактов цикла двигателя, затем могут обрабатываться контроллером и использоваться для синхронизации и планирования подачи топлива.
На 1102 контроллер может вводить в действие лазерную систему, для того чтобы контролировать положение двигателя. Например, если период времени, который двигатель работал на холостом ходу, является большим, чем пороговое значение, контроллер может опционально определять, что транспортное средство должно эксплуатироваться в электрическом режиме. Двигатель впоследствии может прекращать работу и выполнять несколько следующих друг за другом циклов до прибытия в заключительное нерабочее положение покоя. В течение этого периода, контроллер может быть выполнен с возможностью вводить в действие лазерную систему, для того чтобы контролировать положение двигателя в качестве средства идентификации заключительного нерабочего положения покоя двигателя. Может идентифицироваться первый работающий цилиндр, в котором следует инициировать сгорание во время возобновления работы двигателя из условий останова двигателя при холостом ходе.
На 1104 контроллер может быть запрограммирован для использования введенной в действие лазерной системы для выполнения сканирования с низкой мощностью, для того чтобы определять положение двигателя на основании световых откликов, считанных внутри цилиндра. Если должно определяться положение двигателя, на 1106, лазерная система может работать в режиме низкой мощности, чтобы испускать импульсы низкой энергии, которые могут детектироваться лазерным детектором. Например, на фиг. 5, последовательность импульсов низкой энергии испускалась лазерной системой и впоследствии отражалась от верхней части поршня внутри цилиндра. Лазерный детектор затем детектировал отраженные импульсы в LD1, чтобы определять расположение поршня относительно ВМТ.
После того, как определено положение поршня, на 1108 контроллер дополнительно может использовать лазерную систему для определения, должна ли собираться информация об установке фаз газораспределения. Возвращаясь к примеру, показанному на фиг. 5, лазерная система в LD2, например, контролировала положение впускного клапана 426. Когда комбинировался с информацией о положении поршня, определенной из первого режима работы, контроллер затем был способен идентифицировать положение двигателя. На 1108, если выборка данных, собранных лазерной системой, не способна определять такт впуска или положение двигателя, то 1112 показывает, что система может продолжать собирать данные в режиме низкой мощности до тех пор, пока не идентифицированы такт впуска или положение двигателя.
Как только положение двигателя было определено, на 1110 контроллер может использовать положение двигателя для синхронизации подачи топлива. Это может делаться в ответ на оцененные условия эксплуатации, которые, например, могут включать в себя указание запрошенных водителем транспортного средства выходной мощности или крутящего момента (например, на основании положения педали), уровня топлива в топливном баке, нормы потребления топлива двигателя, температуры двигателя, состояния заряда (SOC) бортового устройства накопления энергии, условий окружающей среды, в том числе, влажности и температуры, температуры охлаждающей жидкости двигателя, запроса автоматического управления климатом (например, запросов кондиционирования воздуха или отопления) и т.д.
Возвращаясь на 1104, если контроллер решает, что лазерная система не должна использоваться для поиска положения двигателя, 1114 указывает, что мог быть идентифицирован такт впуска. Например, при запуске из условий останова двигателя при холостом ходе, положение двигателя может сохраняться в ЦПУ 102 в пределах системы 41 управления. В этом примере система 41 управления может полагаться на данные, хранимые в ЦПУ, для определения первого работающего цилиндра и переходить на 1110, для того чтобы синхронизировать подачу топлива.
Фиг. 12 - блок-схема последовательности операций способа, иллюстрирующая примерный способ 1200 для контроля двигателя с использованием одной или более лазерных систем, как описано выше. Способ 1200, например, может выполняться системой 41 управления. Способ включает в себя примерные действия для диагностирования двигателя на основании подхода лазерных измерений в комбинации с другой приобретенной информацией о системе. Например, в одном из вариантов осуществления, если двигатель содержит в себе по меньшей мере два цилиндра, чьи поршни связаны через коленчатый вал, по меньшей мере одна лазерная система может использоваться для измерения положения по меньшей мере одного цилиндра для определения положения поршня в его камере 30 цилиндра. Так как положение поршня внутри его камеры 30 цилиндра может быть связано с положением по меньшей мере одного другого поршня, измерение положения может использоваться для оценки, является ли набор поршней работающим в пределах, например приемлемых допустимых пределах регулировок во время ездового цикла двигателя. Кроме того, измерения из первой лазерной системы в первом цилиндре могут использоваться для идентификации ухудшения характеристик в основанном на применении лазера измерении других цилиндров. Кроме того еще, измерения из первой лазерной системы в первом цилиндре могут использоваться для идентификации ухудшения характеристик положения коленчатого вала двигателя, определенного посредством датчика 118.
На 1202 система управления может использовать информацию о системе, собранную для определения, существует ли набор условий, которые дают возможность контроля. В одном из вариантов осуществления набор условий может быть предопределенным и, например, храниться в справочных таблицах. В еще одном примере набор условий может включать в себя, является ли двигатель вращающимся, но до сгорания, а каждый из множества цилиндров включает в себя лазерную систему зажигания и (инфракрасный, IR) ИК-датчик.
Если контроллер определяет, что диагностическая процедура оправданна, на 1204, контроллер может собирать данные из цилиндра, для того чтобы идентифицировать, что произошло ухудшение характеристик. Если, при выборке условий системы, диагностическая процедура не инициирована, программа заканчивается.
На 1206 система управления сравнивает специфичные показатели с данными из других цилиндров двигателя, для того чтобы оценивать общие характеристики двигателя во время ездового цикла. В одном из вариантов осуществления сравниваемые данные могут собираться каждой лазерной системой во время, управляемое лазерной системой, или, во втором варианте осуществления, специфичные справочные данные могут храниться в справочных таблицах, чтобы сравниваться непосредственно с измеренными данными. Диагностические сравнения предпринимаются для определения текущего состояния системы двигателя. В одном из примеров программа может сравнивать множество измерений положения поршня из множества цилиндров, подвергнутых выборке в общий момент времени или в пределах порогового времени друг от друга. Например, основанное на применении лазера измерение из первого цилиндра (Δx1) может сравниваться с основанным на применении лазера измерением второго цилиндра (Δх2), взятым одновременно, где известно, что первый и второй цилиндры должны иметь заданное взаимное расположение между двумя поршнями, такое как проиллюстрированное на фиг. 4. Таким образом, положения поршней могут сравниваться друг с другом, и если они отличаются на более, чем пороговую величину, то ухудшение характеристик может указываться на 1208, как обсуждено ниже. В еще одном примере множество основанных на применении лазера измерений положения может формироваться по первому цилиндру во время вращения двигателя и сравниваться с изменениями положения двигателя, указанными с датчика 118 положения коленчатого вала. Если изменение положения поршня посредством основанного на применении лазера измерения не совпадает с изменением положения, указанным с датчика положения коленчатого вала, вновь может быть указано ухудшение характеристик. В еще одном другом примере три или более основанных на применении лазера измерений положения могут формироваться по трем разным цилиндрам двигателя и сравниваться друг с другом, чтобы идентифицировать, измерение какого цилиндра, если это имеет место, расходится с другими двумя или более измерениями на пороговое значение. Кроме того еще, основанные на применении лазера измерения положения могут сравниваться с положениями распределительного вала, указанными посредством датчика распределительного вала, чтобы идентифицировать расхождения и, таким образом, потенциально возможное ухудшение характеристик.
Если принято решение, что регулировка поршней больше, чем пороговое значение, 1208 показывает, что в контроллер может быть отправлен сигнал, направляющий его, чтобы устанавливал диагностический код, указывающий, что произошло ухудшение регулировки двигателя.
Следует принять во внимание, что конфигурации и способы, раскрытые в материалах настоящей заявки, являются примерными по сути и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенный способ может быть применен к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Объект патентования настоящего раскрытия включает в себя все новейшие и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут ссылаться на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в объект патентования настоящего раскрытия.
Реферат
Изобретение относится к системам зажигания в двигателях внутреннего сгорания. Техническим результатом является повышение эффективности запуска двигателя транспортного средства с гибридным приводом. Результат достигается тем, что способ содержит приведение в действие лазерного устройства зажигания в цилиндре двигателя и идентификацию положения двигателя в ответ на это; и воспламенение смеси воздуха и топлива в цилиндре с помощью лазерного устройства зажигания. 3 н. и 16 з.п. ф-лы, 13 ил.