Способ определения координат источника радиоизлучения в трехмерном пространстве - RU2643360C1
Код документа: RU2643360C1
Чертежи


Описание
Изобретение относится к области радиотехники и может быть использовано в пассивных системах местоопределения (МО) источников радиоизлучения (ИРИ), размещенных на неровных участках местности.
Сущность изобретения заключается в расположении множества приемных пунктов (ПП) (не менее четырех), конструктивно размещенных на беспилотных летательных аппаратах (БЛА) типа "мультикоптер" (фиг.1, электронный ресурс - www.DJI.com/ru/mobile/spreading-wings-900 (дата обращения: 13.02.17 г.)) в районе предполагаемого нахождения ИРИ. В указанный район ПП доставляются посредством беспилотного или пилотируемого летательного аппарата среднего класса. В состав каждого ПП входят блок навигационно-временного обеспечения, ненаправленная антенна, панорамный приемник, приемопередатчик. В районе предполагаемого нахождения ИРИ приемные пункты распределяют в пространстве по команде с наземного пункта управления и обработки (НПУ и О), формируя, таким образом, разностно-дальномерную систему (РДС) МО. Если количество ПП равно четырем, то их располагают в вершинах тетраэдра: периферийные ПП - в вершинах его нижнего основания, а опорный в вершине над основанием. Если количество ПП больше четырех, то, в зависимости от условий и требований, их располагают в вершинах пирамиды или распределяют над несколькими ИРИ в вершинах соответствующих тетраэдров. В образованной РДС по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляется определение их координат в пространстве, высокоточная привязка к собственной системе координат РДС и передача координатной информации о периферийных ПП на опорный. По команде с него все ПП выполняют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ретранслируют его на опорный. Прием и ретрансляция сигнала ИРИ приемными пунктами осуществляются их панорамными приемниками и приемопередатчиками соответственно. На опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляются и отправляются на НПУ и О координаты обнаруженного ИРИ. На НПУ и О оценивается значение погрешности полученных координат и в случае превышения требуемого значения, установленного оператором, осуществляется пересчет собственных координат всех ПП для их перестроения. Такое перестроение ПП относительно ИРИ выполняется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения σтреб..
Достигаемым техническим результатом изобретения является снижение погрешности определения координат ИРИ, размещенных в пространстве на неровных участках местности. Технический результат достигается за счет расположения ПП в пространстве относительно ИРИ на рассчитанных высотах в вершинах тетраэдра, что позволяет определять координаты ИРИ в трехмерном пространстве (X, Y, Z).
Способ поясняется иллюстрациями, на которых представлены:
фиг. 1 - беспилотный летательный аппарат типа "мультикоптер";
фиг. 2 - линии равной погрешности на плоскости при размещении приемных пунктов на некоторой заданной высоте в вершинах квадрата;
фиг. 3 - геометрия расположении ПП в пространстве при определении координат ИРИ а) способом-прототипом и б) предложенным способом;
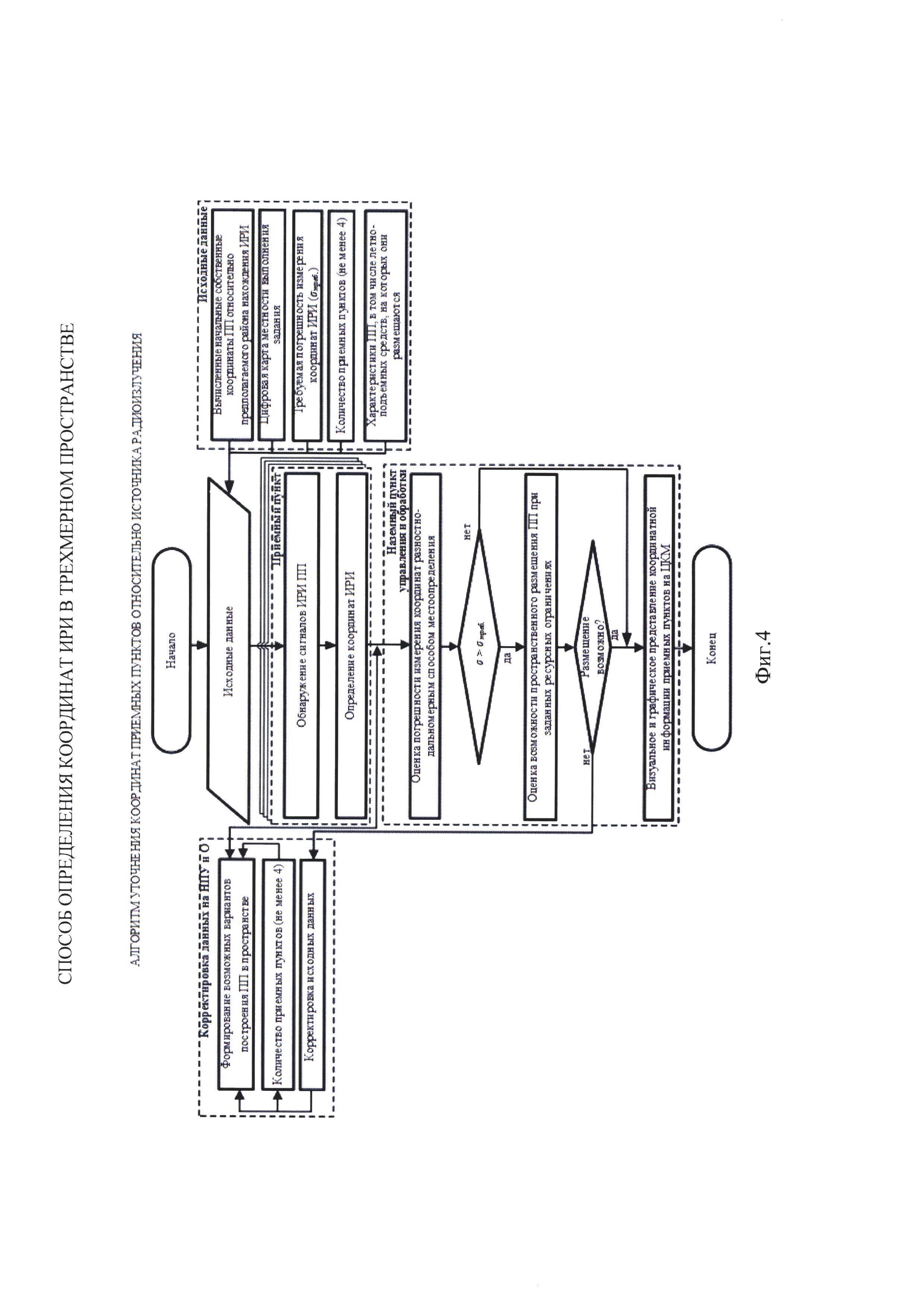
фиг. 4 - новый алгоритм уточнения координат ПП относительно ИРИ;
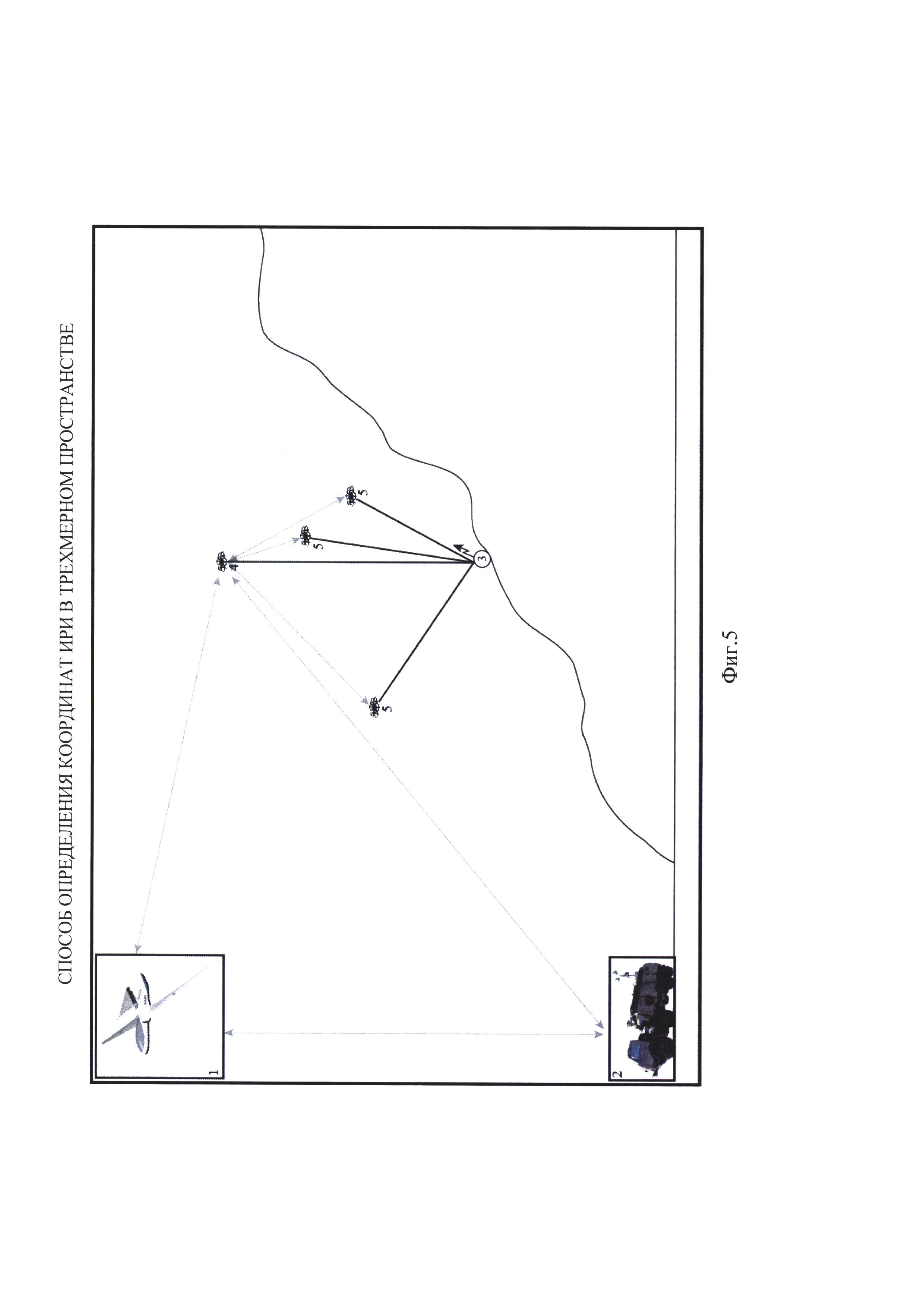
фиг. 5 - визуальное пояснение работы предложенного способа определения координат ИРИ в трехмерном пространстве;
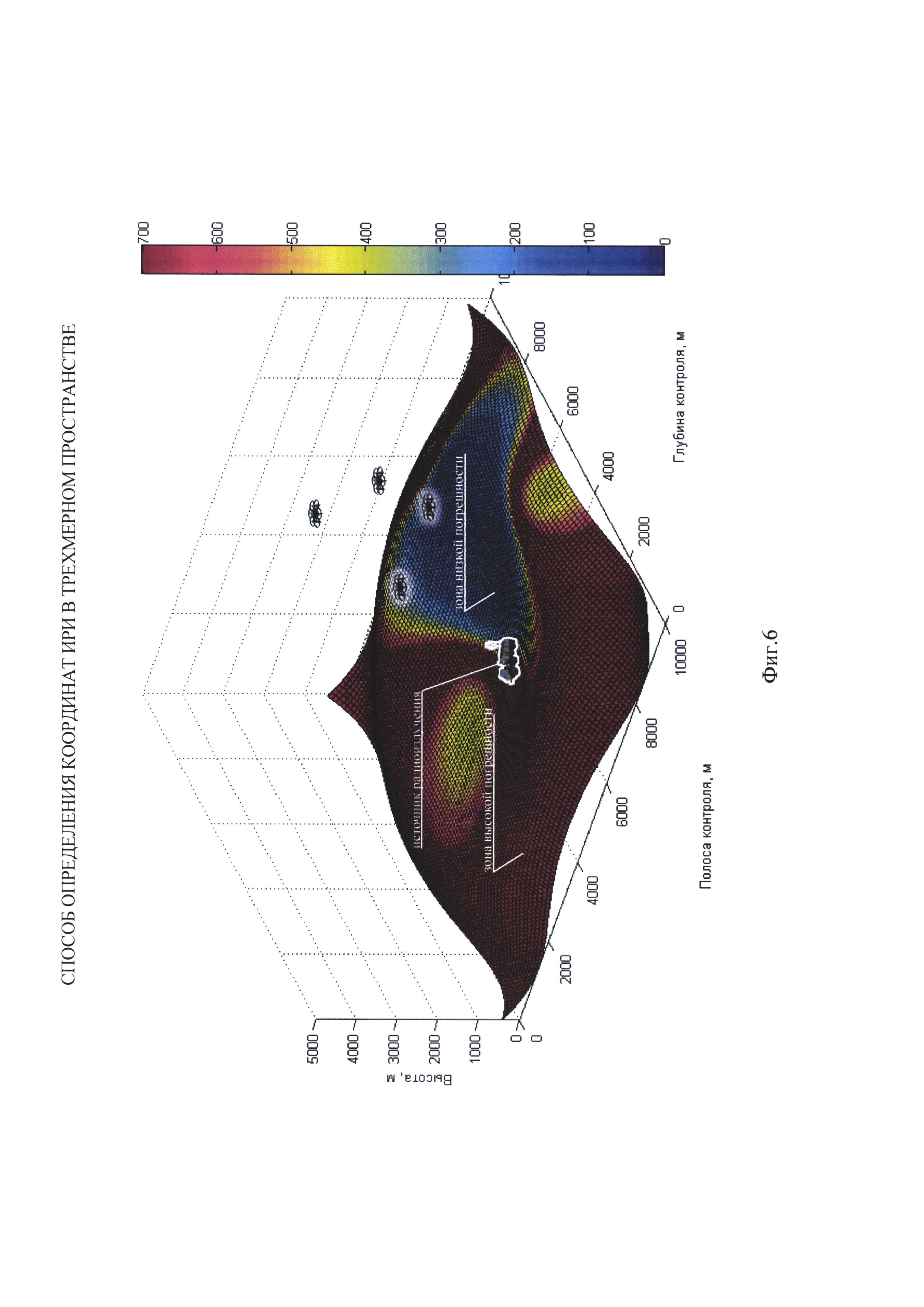
фиг. 6 - расположение ИРИ на границе предполагаемого района поиска;
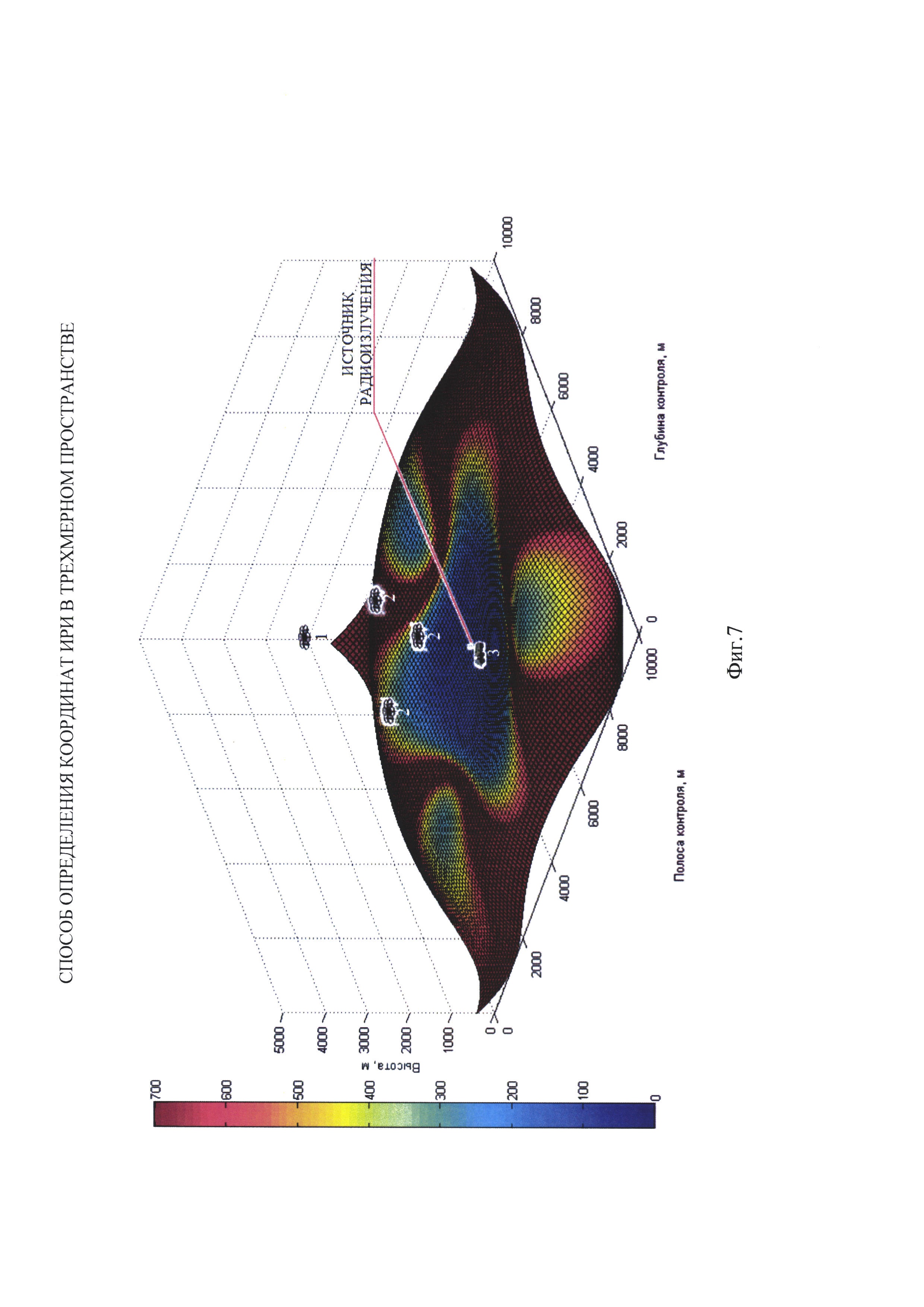
фиг. 7 - расположение ИРИ в центре предполагаемого района поиска;
фиг. 8 - линии равной погрешности при размещении приемных пунктов на рассчитанных высотах в вершинах тетраэдра.
Известен способ местоопределения ИРИ, близкий по технической сущности к заявляемому изобретению (см., например, Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы - М.: "Радио и связь", 1986. - 264 с), основанный на измерении корреляционным методом временных задержек приема сигнала ИРИ, относительно одного из N≥2 пространственно-разнесенных пунктов радиоконтроля. Недостатками указанного способа являются необходимость устойчивого приема пунктами радиоконтроля сигналов контролируемого ИРИ, что не всегда возможно в условиях сложного рельефа труднодоступной местности и недостаточная точность местоопределения ИРИ, связанная с большим удалением ИРИ от пунктов радиоконтроля.
Известен способ-прототип определения местоположения источника радиоизлучения (см. Пат. РФ 2 526 094, МПК GO IS 5/12 (2006.01), опубл. 20.04.2014 г.), сущность которого заключается в предварительной доставке в предполагаемый район нахождения ИРИ БЛА-датчиков (не менее четырех). Каждый из БЛА-датчиков состоит из блока навигационно-временного обеспечения, ненаправленной антенны, панорамного приемника и приемопередатчика. В качестве средства доставки и обслуживания БЛА-датчиков, а также для ретрансляции координатной информации, поступающей с них, и передачи команд управления с наземного пункта управления и обработки (НПУО), используется беспилотный или пилотируемый летательный аппарат (ЛА) среднего класса (ЛА-ретранслятор). После доставки в предполагаемый район нахождения источников радиоизлучения, по командам с наземного пункта управления и обработки, БЛА-датчики распределяют в пространстве. Совокупность БЛА-датчиков и ЛА-ретранслятор формально образуют в пространстве многопозиционную систему радиоконтроля. По сигналам блока навигационно-временного обеспечения определяются координаты в пространстве каждого БЛА-датчика и осуществляется их высокоточная привязка к собственной системе координат разностно-дальномерной системы и к единому времени, для этого информация о координатах периферийных БЛА-датчиков в сформированной РДС передается на центральный БЛА-датчик. Каждый БЛА-датчик, имеющий панорамный приемник, осуществляет поиск сигналов ИРИ в заданном частотном диапазоне. При обнаружении сигнала ИРИ осуществляется его оцифровка и передача с помощью передающего устройства приемопередатчика на центральный БЛА-датчик. На центральном БЛА-датчике по поступившим данным осуществляется определение местоположения ИРИ. Данный способ позволяет повысить точность местоопределения ИРИ, функционирующих в труднодоступной местности за счет возможности доставки туда мультикоптеров и использования их свойств маневренности и сохранения неподвижного состояния в пространстве. Недостатком данного способа-прототипа является определение координат ИРИ без учета высоты их размещения на местности, т.е. в случае нахождения ИРИ на неровном участке местности или в какой-либо точке пространства (горе, здании, углублении, под землей и т.д.) высота его размещения всегда будет равна нулю. Использование способа-прототипа для определения координат ИРИ в пространстве (с учетом высоты) приведет к высоким погрешностям, т.к. для пространства, в отличии от плоскости, точка, находящаяся под центром квадрата, в вершинах которого располагаются ПП, характеризуется самой большой погрешностью (фиг.2).
Для достижения технического результата изобретения предлагается в указанном способе-прототипе располагать ПП не в одной плоскости в вершинах квадрата, а на рассчитанных высотах в вершинах тетраэдра, что позволит вместе с координатами X и Y оценивать координату Z - высоту расположения ИРИ в пространстве (фиг.3). Это является основным преимуществом предложенного способа и позволяет снизить погрешность определения координат ИРИ, размещенных в пространстве на неровных участках местности.
Кроме того, использование в рамках предлагаемого способа нового алгоритма уточнения координат ПП относительно ИРИ (фиг.4) позволяет снизить погрешность определения его координат до минимально возможного значения, которое обеспечивается при размещении опорного ПП над ИРИ (см., например, Гайчук Ю.Н., Печурин В.В., Серебряков Ю.И. Исследование погрешности определения местоположения источников радиоизлучений группой беспилотных летательных аппаратов. Наукоемкие технологии, 2016, №12. - с. 34-38).
Предложенный способ поясняется иллюстрацией, представленной на фиг.5. На фиг.5 приняты следующие обозначения: 1 - беспилотный или пилотируемый летательный аппарат среднего класса; 2 - наземный пункт управления и обработки; 3 - источник радиоизлучения, координаты которого определяются; 4 - опорный ПП РДС МО; 5 - периферийные ПП РДС МО.
Множество ПП (не менее 4), конструктивно размещенных на БЛА типа "мультикоптер", доставляют посредством беспилотного или пилотируемого летательного аппарата среднего класса 1 в район предполагаемого нахождения ИРИ. Каждый ПП содержит блок навигационно-временного обеспечения, ненаправленную антенну, панорамный приемник и приемопередатчик. В районе расположения ИРИ 3, предположительно находящегося на неровном участке местности (горе, здании, углублении, под землей и т.д.), приемные пункты 4, 5 по команде с НПУ и О 2 распределяют в пространстве на рассчитанных высотах вокруг указанного района, формируя, таким образом, РДС МО. Если количество ПП равно четырем, то их располагают в вершинах тетраэдра: периферийные ПП - в вершинах его нижнего основания, а опорный в вершине над основанием. Если количество ПП больше четырех, то в зависимости от условий и требований их располагают в вершинах пирамиды или распределяют над несколькими ИРИ в вершинах соответствующих тетраэдров. В образованной РДС по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляется определение их координат в пространстве, высокоточная привязка к собственной системе координат РДС и передача координатной информации о периферийных ПП на опорный. По команде с него все ПП выполняют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ретранслируют его на опорный. Прием и ретрансляция сигнала ИРИ приемными пунктами осуществляются их панорамными приемниками и приемопередатчиками соответственно. На опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляются и отправляются на НПУ и О координаты обнаруженного ИРИ. На НПУ и О на основе расчета поверхностей равных погрешностей оценивается значение погрешности полученных координат и в случае превышения требуемого значения σтреб., установленного оператором, осуществляется пересчет собственных координат всех ПП для их перестроения. Это необходимо для снижения погрешности определения координат обнаруженного ИРИ, который изначально может находиться на границе предполагаемого района именно в зоне высокой погрешности (фиг.6). Пересчет координат ПП выполняется по новому алгоритму уточнения координат ПП относительно ИРИ (фиг.4) с выдачей оператору одного (четыре ПП) или нескольких (ПП больше четырех) вариантов расположения ПП уже с их новыми координатами. Такое уточнение координат ПП относительно ИРИ выполняется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения (фиг.7).
Новый алгоритм уточнения координат ПП относительно ИРИ предназначен для снижения погрешности определения координат ИРИ до минимально возможного значения. Для работы алгоритма требуются следующие исходные данные, которые вводятся (выбираются из возможных) оператором на НПУ и О перед началом выполнения задания.
1. Характеристики ПП (частота дискретизации, динамический диапазон, полоса приема и т.д.), в том числе характеристики БЛА, на которых они размещаются.
2. Количество ПП и соответственно БЛА, на которых они размещаются. Минимальное число ПП равно четырем.
3. Требуемая погрешность определения координат ИРИ σтреб.- задается исходя из условий функционирования и заданных требований.
4. Цифровая карта местности (ЦКМ) выполнения задания предназначена для оценки возможности пространственного перестроения ПП и графического отображения обстановки в исследуемом районе.
5. Вычисленные первоначальные собственные координаты ПП относительно предполагаемого района нахождения ИРИ. В эти координаты, как правило, позиции на границах указанного района, ПП распределяют в начале выполнения задания.
Работа алгоритма начинается с обнаружения сигнала ИРИ и определения его координат на опорном ПП. Вычисленные координаты обнаруженного ИРИ отправляются на НПУ и О, где на основе расчета поверхностей равных погрешностей оценивается значение погрешности полученных координат. Полученное значение сравнивается с требуемым σтреб. и в случае его превышения осуществляется оценка возможности пространственного перестроения ПП исходя из их характеристик (в том числе характеристик БЛА) и цифровой карты местности (различные неровности и препятствия, климатические условия, т.д.). При положительном результате выполняется формирование возможных вариантов построения ПП в пространстве и, при необходимости, увеличение их числа. Уточнение координат ПП для их перестроения относительно ИРИ осуществляется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения (в идеальном случае может быть получено минимально возможное значение погрешности, которое обеспечивается при размещении опорного ПП над ИРИ). В этом случае координатная информация с отображением на ЦКМ выдается оператору НПУ и О. В случае отрицательного результата возможности перестроения ПП в пространстве координатная информация также выдается оператору НПУ и О с отображением на ЦКМ, но с уведомлением о высокой погрешности измеренных координат обнаруженного ИРИ и отсутствия возможности ее снижения.
Расчет поверхностей равной погрешности в алгоритме уточнения координат ПП относительно ИРИ осуществляется на основе вычисления погрешности МО ИРИ в каждой точке исследуемого пространства. При этом основой разностно-дальномерного способа МО является измерение разности расстояний от ИРИ до размещенных в разных точках пространства опорного и периферийных ПП. Расстояние от ИРИ до i-го ПП в пространстве описывается выражением

где (x,y,z) - координаты ИРИ, (xi,yi,zi) - координаты i-го ПП в пространстве, i=1,...,N - номер ПП, N - количество ПП.
Погрешность МО ИРИ в пространстве рассчитывается в соответствии с выражением

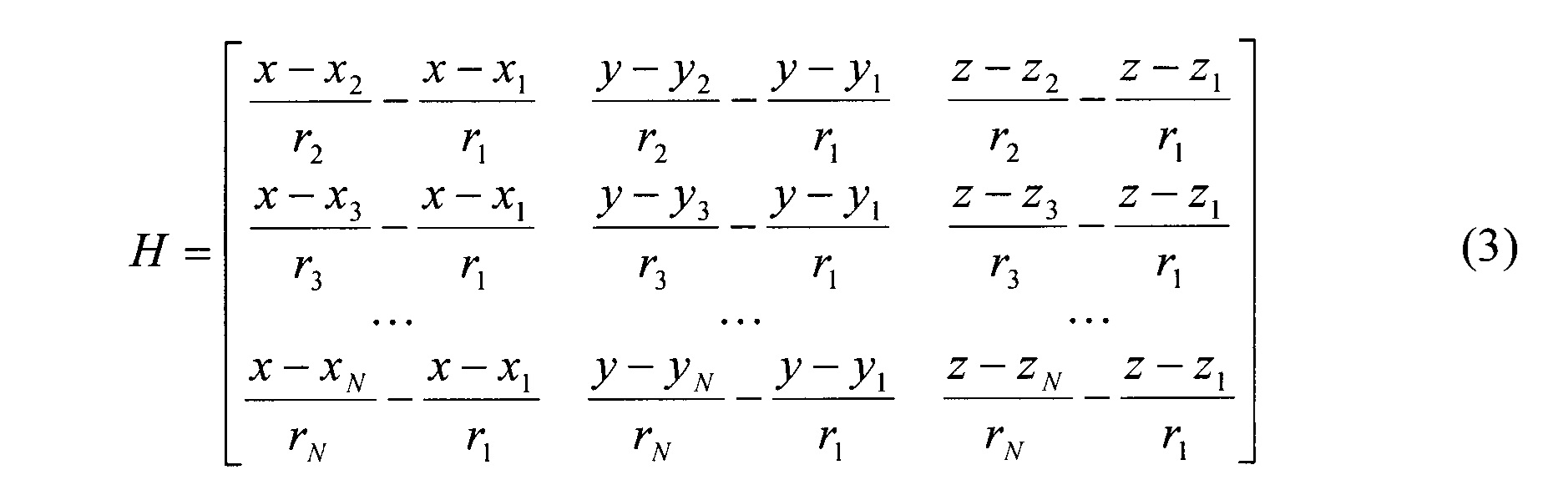
где σΔr- погрешность определения разности расстояний; tr() - след матрицы; Н - матрица частных производных от ri, ()Т - транспонированная матрица, ()-1 - обратная матрица.
Матрица (HTH)-1 является ковариационной матрицей погрешностей МО ИРИ, а элементы ее главной диагонали представляют собой дисперсии ошибок пространственных координат
Матрица частных производных по

В качестве примера на фиг. 8 показаны линии равной погрешности на поверхности исследуемого района размером 10 на 10 км. На фигуре расстояние между периферийными ПП составляет 6 км, высота их подъема - 2,2 км, высота подъема опорного ПП - 3,1 км. Минимальная погрешность МО ИРИ при таком расположении ПП обеспечивается под опорным. Поверхность равной погрешности при таком расположении ПП показана на фиг.3б.
Таким образом, предложенный способ может быть использован в пассивных системах местоопределения ИРИ и по сравнению со способом-прототипом обладает рядом преимуществ. Расположение ПП в пространстве на рассчитанных высотах в вершинах тетраэдра позволяет определять координаты ИРИ с учетом высоты его расположения и тем самым снизить погрешность определения координат ИРИ, находящихся на неровных участках местности. Применение в предложенном способе нового алгоритма уточнения координат ПП относительно ИРИ позволяет снизить погрешность определения координат ИРИ до минимально возможного значения, которое обеспечивается при размещении опорного ПП над ИРИ.
Реферат
Изобретение относится к области радиотехники и может быть использовано в пассивных системах местоопределения (МО) источников радиоизлучения (ИРИ), размещенных на неровных участках местности. Достигаемый технический результат – снижение погрешности определения координат ИРИ. Сущность изобретения заключается в расположении четырех приемных пунктов (ПП), размещенных на беспилотных летательных аппаратах (БЛА) типа "мультикоптер" в районе предполагаемого нахождения ИРИ. В указанный район ПП доставляются посредством беспилотного или пилотируемого летательного аппарата среднего класса. В состав каждого ПП входят блок навигационно-временного обеспечения, ненаправленная антенна, панорамный приемник, приемопередатчик. В районе предполагаемого нахождения ИРИ приемные пункты распределяют в пространстве по команде с наземного пункта управления и обработки (НПУО), формируя, таким образом, разностно-дальномерную систему (РДС) МО. Приемные пункты располагают в вершинах тетраэдра: периферийные ПП в вершинах его нижнего основания, а опорный в вершине над основанием. В образованной РДС по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляется определение их координат в пространстве, высокоточная привязка к собственной системе координат РДС и передача координатной информации о периферийных ПП на опорный. По команде с него все ПП выполняют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ретранслируют его на опорный. Прием и ретрансляция сигнала ИРИ приемными пунктами осуществляются их панорамными приемниками и приемопередатчиками соответственно. На опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляются и отправляются на НПУО координаты обнаруженного ИРИ. На НПУО оценивается значение погрешности полученных координат и в случае превышения требуемого значения, установленного оператором, осуществляется пересчет собственных координат всех ПП для их перестроения. Такое перестроение ПП относительно ИРИ выполняется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения. 8 ил.
Комментарии