Отслеживание движения челюсти - RU2691320C2
Код документа: RU2691320C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройствам и способам для отслеживания и генерирования цифровой модели, визуализирующей движение твердой ткани челюсти человека.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные системы, например системы, использующие механические, электронные, ультразвуковые, электромагнитные и оптические способы, использовались применительно к записи движений челюсти человека. Одним из типичных решений является прикрепление физических маркеров как к верхней челюсти, так и к нижней челюсти и запись их соответствующего относительного движения. Известно, что такие системы предусматривают визуализацию измеренного или обнаруженного движения на дисплее, возможно, применительно, например, к цифровой поверхностной модели краниальной твердой ткани.
Независимо от технологий, рабочий процесс, задействованный в этих процедурах, часто является времязатратным и трудоемким, поскольку он может включать в себя использование оборудования и операций, выполняемых индивидуально и отдельно друг от друга. Эти операции могут включать в себя прикрепление маркеров к анатомической структуре, выполнение движений челюсти и обнаружение и запись движений маркеров, а также генерирование модели, визуализирующей движения челюсти, которые могут затем быть показаны на дисплее. Например, в случае, когда моделирование движений челюсти визуализируется позже как отдельный процесс, и только тогда осознается, что дополнительная информация о движении будет необходима или желательна, чтобы улучшить цифровую модель движения, это будет невозможно до тех пор, пока в следующий раз можно будет обложить пациента маркерами, и обнаружить и записать движение челюсти заново.
Примеры предшествующего уровня техники по отслеживанию движений челюсти представляют собой системы, описанные в патентных публикациях US 4,836,778, US 4,859,181, US 2013/0157218 и WO 2013/0175018.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение и его предпочтительные варианты осуществления включают в себя устройство и способ, в которых цифровая модель, показывающая движения челюсти человека, генерируется в случае использования медицинского аппарата для формирования рентгеновских изображений, например, аппарата КТ (компьютерной томографии), выполненного с возможностью получения информации об изображении для генерирования поверхностных моделей анатомических структур краниальных твердых тканей. Это позволяет получать как данные рентгеновского изображения, так и данные о движениях челюсти с помощью одного и того же устройства. Оборудуя устройство средствами обработки изображений и дисплеем, на котором моделируемое движение твердой ткани может быть визуализировано в том же самом контексте, в каком осуществляется фотографирование движения реперных объектов, прикрепленных к краниальной структуре, варианты осуществления изобретения дают возможность следить за движениями твердой ткани в реальном времени, в то время как присутствующий пациент производит любое желаемое жевательное или иное движение челюстью, подлежащее моделированию.
В соответствии с одним вариантом осуществления способ в соответствии с изобретением включает в себя обеспечение наличия по меньшей мере одной камеры, установленной в физическом контакте с аппаратом КТ-визуализации. Способ включает в себя прикрепление первого элемента отслеживания к челюсти человека и прикрепление второго элемента отслеживания к верхней челюсти человека или к какой-либо части анатомической структуры человека, которая находится в неподвижном соединении с верхней челюстью. Генерируют КТ-реконструкцию твердой ткани анатомической структуры человека и идентифицируют местоположения элементов отслеживания относительно анатомической структуры твердой ткани. В одном варианте осуществления, используя по меньшей мере одну камеру, захватывают серию изображений элементов отслеживания, в то время когда пациент производит движение челюстью, и определяют местоположения элементов отслеживания. Затем определяют позиции анатомической структуры твердой ткани, используя знание взаимосвязи между элементами отслеживания и анатомической структурой, и позиции анатомических структур твердых тканей передают на визуальную систему для отображения на цифровой модели жевательного движения челюсти.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Последующие чертежи используются для представления некоторых аспектов различных вариантов осуществления изобретения.
Фиг. 1 представляет основные части одного предпочтительного устройства в соответствии с изобретением.
Фиг. 2 представляет принципиальную схему устройства для обнаружения движения челюсти в соответствии с одной системой, применимой для использования в контексте изобретения.
Фиг. 3 представляет детекторный модуль, прикрепленный к медицинскому рентгеновскому аппарату, содержащий компоненты, применимые для использования в контексте изобретения.
Фиг. 4 представляет устройство для визуализации отслеживания движения, в котором элемент отслеживания прикрепляют к нижней челюсти, в поле зрения двух камер.
Фиг. 5 представляет устройство для визуализации отслеживания движения, как на фиг. 4, но в котором только часть реперных объектов элемента отслеживания находится в поле зрения любой из двух камер.
Фиг. 6 и 7 представляют (с помощью блок-схем) процедуры, применимые для использования в изобретении для генерирования цифровой модели, визуализирующей движение челюсти.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 показаны основные части одного предпочтительного устройства в соответствии с изобретением. Устройство на фиг. 1 содержит медицинский аппарат (10) для формирования рентгеновских изображений, состоящий из вертикальной опорной структуры (11), от которой горизонтально отходит консоль (12), поддерживающая приспособление (17) для опоры пациента, и консольного элемента (13), который поддерживает консольный элемент (14), к которому крепятся средства формирования изображения. Консольный элемент (14), к которому крепятся средства формирования изображения, выполнен поворотным. Средства формирования изображения включают в себя рентгеновский источник (15) и приемник (21) информации рентгеновского изображения, расположенные на расстоянии друг от друга. Средства формирования изображения расположены по отношению к приспособлению (17) для опоры пациента таким образом, что пункт (18) формирования изображения создается внутри области между рентгеновским источником (15) и приемником (21) информации рентгеновского изображения, так что луч, генерируемый рентгеновским источником (15), может быть направлен через упомянутый пункт (18) формирования изображения по направлению к приемнику (21) информации рентгеновского изображения. Аппарат содержит средство управления, в качестве которого на фиг. 1 представлен пользовательский интерфейс (16), расположенный на консоли (12), поддерживающей приспособление (17) для опоры пациента, и средство (19) выбора режима работы, расположенное в нем. В аппарате в соответствии с фиг. 1 приемник (21) информации рентгеновского изображения выполнен как часть приемного модуля (20) визуальной информации, детекторный модуль выполнен в функциональной связи с компьютером (30). Средство для обработки визуальной информации расположено рядом с компьютером (30), а компьютер также выполнен в функциональной связи с дисплеем (31). Пользовательский интерфейс (16) может быть также оборудован дисплеем, также может быть использован дисплей, расположенный на другой конструкции аппарата для формирования рентгеновских изображений. Аппаратные компоненты и подсистемы системы управления (СУ) могут быть расположены в разных местах устройства, некоторые могут быть установлены в компьютере (30), а некоторые могут быть установлены, например, в вертикальной опорной структуры (11) или в непосредственной близости от компонента устройства, подлежащего управлению, или объединены с ним.
На фиг. 2 показана принципиальная схема устройства для обнаружения движения челюсти в соответствии с одной системой, применимой для использования в контексте изобретения. Устройство включает в себя две камеры (22), расположенные на расстоянии друг от друга и предназначенные для фотографирования головы человека, с которой соединены средства (50) отслеживания. В устройстве в соответствии с фиг. 2 средства (50) отслеживания состоят из двух отдельных опорных структур (51) для реперных объектов, таких как светоотражающие объекты (52). Одна из опорных структур (51) соединена со лбом человека, другая - с нижней челюстью человека. Устройство на фиг. 2 также содержит источники (23) света, установленные в непосредственной близости от камер (22). Источник (23) света выполнен с возможностью испускать свет по существу в том направлении, в котором нацелена ближайшая камера (22).
На фиг. 3 показан детекторный модуль (20), прикрепленный к медицинскому рентгеновскому аппарату, содержащий компоненты, применимые для использования в контексте изобретения. В отличие от того, что было представлено на фиг. 2, камеры расположены не на вертикальном, а на горизонтальном расстоянии друг от друга, и имеются источники (23) света выше и ниже камер (22). В модуле также расположен детектор (21) рентгеновского изображения. Прикрепление модуля (20) к медицинскому рентгеновскому аппарату должно быть осуществлено таким образом, что детектор (21) рентгеновского изображения является или может быть выровненным с пунктом (18) визуализации устройства.
На фиг. 4 показано устройство для визуализации отслеживания движения, в котором средство отслеживания прикреплено к нижней челюсти и находится в поле зрения двух камер. Средство (50) отслеживания на фиг. 4 содержит опорную структуру (51) для пяти светоотражающих реперных объектов (52). Две камеры (22) устройства расположены и направлены таким образом по отношению к светоотражающим реперным объектам (52), что все пять объектов находятся в прямой видимости обеих камер (22). Устройство включает в себя источник (23) света в непосредственной близости от обеих камер (22), причем источники (23) света расположены с возможностью испускать свет по существу в том направлении, в котором нацелена ближайшая камера.
На фиг. 5 показано устройство для визуализации отслеживания движения, как на фиг. 4, но в котором камеры (22) расположены на большем расстоянии друг от друга. Такое устройство может быть применено, например, применительно к устройству, подобному показанному на фиг. 3, в котором камеры (22) расположены на противоположных сторонах детектора (21) рентгеновского изображения детекторного модуля (20).
В устройстве на фиг. 5 только часть реперных объектов (52) средства (50) отслеживания находится в поле зрения любой из двух камер (22), но определение позиции средства (50) отслеживания также возможно в контексте такого устройства, до тех пор, пока по меньшей мере один из реперных объектов (52) находится в поле зрения обеих камер (22). Это может быть выполнено путем, например, триангулирования позиции с использованием информации о калибровке камеры и обнаруженных местоположений реперных объектов (52), после чего соответствующая точка в модели отслеживающего устройства преобразуется в найденную позицию. Модель элемента отслеживания затем вращается вокруг этой точки, так что при проецировании в поле зрения обеих камер квадрат расстояния между положением проецируемой точки и соответствующим положением обнаруженного реперного объекта минимизируется. Вращение и параллельный перенос определяют позицию модели отслеживания.
Устройства для получения информации с целью генерирования цифровой модели, демонстрирующей движение краниальной структуры твердой ткани, которые обсуждались выше, базируются на использовании двух камер, но изобретение может быть осуществлено с использованием устройств, имеющих любое количество камер.
Фиг. 6 представляет одну процедуру, применимую для использования в устройстве согласно изобретению с целью визуализации движения челюсти. Когда человек, размещенный для визуализации с помощью по меньшей мере одной камеры, которая расположена на медицинском аппарате для формирования рентгеновских изображений, начинает движение челюстью, инициируют отслеживание движения путем фотографирования по меньшей мере одного элемента отслеживания (как было сказано выше, средство отслеживание челюсти включает в себя светоотражающий реперный объект). Система управления устройством затем обнаруживает на фотографии по меньшей мере один элемент отслеживания и определяет его положение на основе эталонной модели элемента отслеживания и информации о калибровке камеры. Моделируемое движение челюсти может затем быть визуализировано на дисплее даже в реальном времени путем многократного преобразования найденной позиции элемента отслеживания в цифровую модель анатомической структуры.
Один способ создания эталонной модели средства отслеживания включает в себя, в первую очередь, использование медицинского аппарата для формирования рентгеновских изображений для генерирования КТ-реконструкции нижней челюсти и использование средства отслеживания, включающего в себя реперные объекты, а затем визуализация этой реконструкции представляется на дисплее. Когда пользовательский интерфейс устройства содержит средство для указания местоположений реперных объектов на отображаемой визуализации, программное обеспечение для обработки изображений устройства способно генерировать эталонную модель, определяющую пространственную взаимосвязь между реперными объектами и реконструкцией анатомической структуры.
Информация о калибровке камеры, указанная на фиг. 6, включает в себя внутренние и внешние параметры одной или более камер устройства. Такая информация о калибровке может быть получена с использованием стандартных способов калибровки компьютерных видеокамер, известных специалистам в этой области техники.
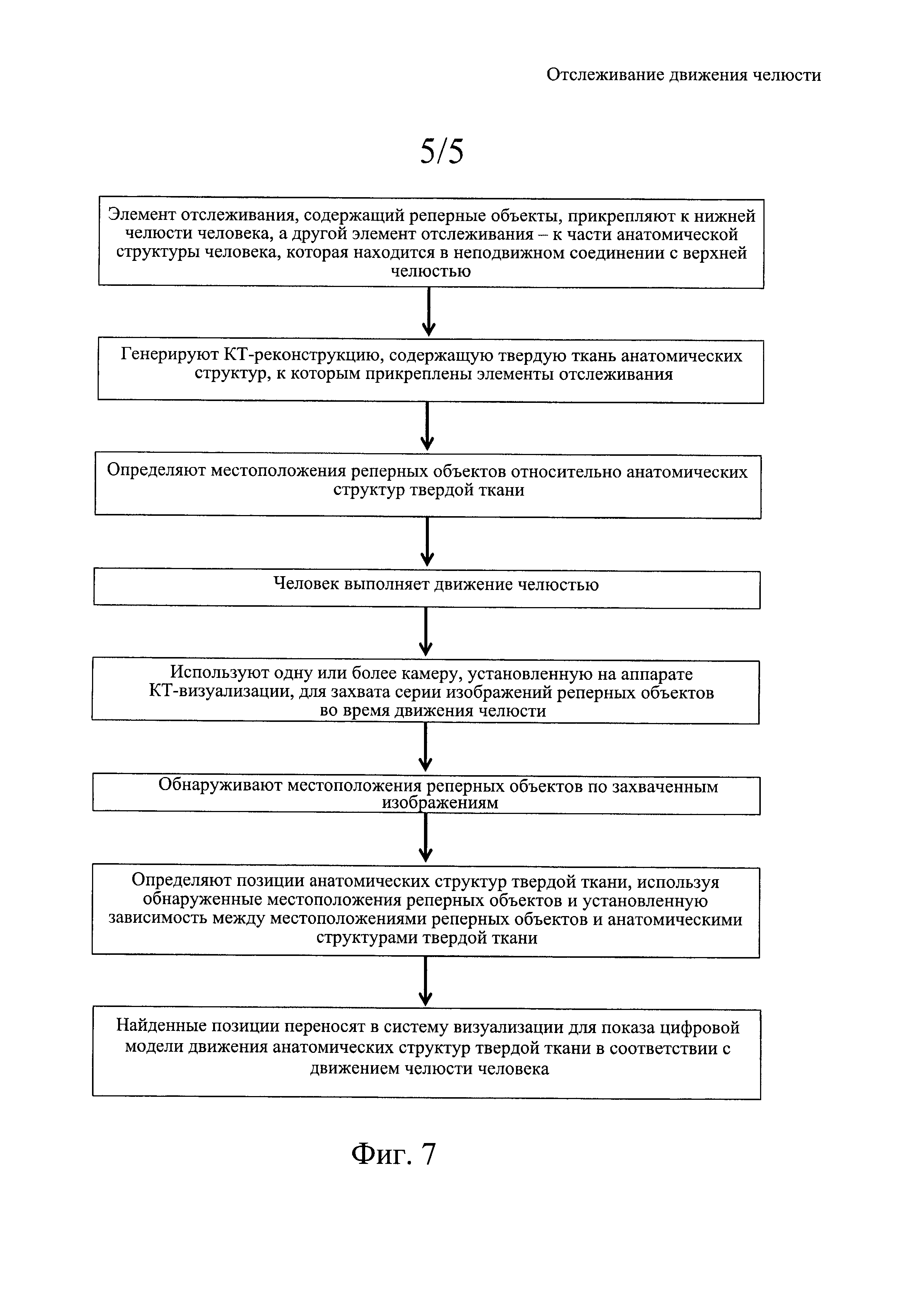
Фиг. 7 представляет другой способ представления варианта осуществления в соответствии с изобретением. В соответствии с фиг. 7, элемент отслеживания, содержащий реперные объекты, прикрепляют к нижней челюсти человека, а другой элемент отслеживания - к какой-либо части анатомической структуры человека, которая находится в неподвижном соединении с верхней челюстью человека. Затем генерируют КТ-реконструкцию, охватывающую твердую ткань анатомических структур, к которым прикреплены элементы отслеживания, и определяют реперные объекты относительно анатомических структур твердой ткани. Когда человек производит движение челюстью, одну или более камер, установленных на устройстве КТ-визуализации, используют для захвата серии изображений реперных объектов во время движения челюсти и обнаруживают местоположения реперных объектов по захваченным изображениям. Позиции анатомических структур твердой ткани затем определяют, используя обнаруженные местоположения реперных объектов, а установленную связь между местоположениями реперных объектов и анатомическими структурами твердой ткани, а также найденные позиции, переносят в систему визуализации для показа цифровой модели движения анатомических структур твердой ткани в соответствии с движением челюсти человека.
Для специалиста в данной области техники очевидно, что в том, что касается деталей, настоящее изобретение может быть реализовано также другими способами, чем в соответствии с вариантами осуществления изобретения, описанными выше, и что различные детали вариантов осуществления могут быть реализованы в других комбинациях, чем буквально описанные выше. В качестве примера, медицинский аппарат для формирования рентгеновских изображений не обязательно должен быть подобен устройству, показанному на фиг. 1. Средства для формирования рентгеновских изображений медицинского аппарата для формирования рентгеновских изображений могут быть установлены вместо опорной консоли, например, внутри кольцеобразного гентри.
Подводя итоги, различные аспекты изобретения включают отслеживание движения челюсти человека с помощью по меньшей мере одной камеры, выполненной с возможностью фотографировать движение элементов отслеживания, причем элементы отслеживания представляют собой реперные объекты и прикрепляются к нижней челюсти человека и верхней челюсти человека или к какой-либо части анатомической структуры человека, которая находится в неподвижном соединении с нижней челюстью. Может быть использовано устройство, содержащее систему управления, включающую в себя первую подсистему для управления операциями по меньшей мере одной камеры с целью фотографирования движения элементов отслеживания, и вторую подсистему, содержащую средство обработки визуальной информации, для обнаружения проекций и определения позиций элемента отслеживания на изображениях, захваченных по меньшей мере одной камерой, и для использования этой информации применительно к цифровой модели, изображающей твердую ткань по меньшей мере нижней челюсти, а также для генерирования динамической цифровой модели, подлежащей показу на дисплее, которая визуализирует движение твердой ткани нижней челюсти в соответствии со сфотографированным движением реперных объектов. Устройство может дополнительно содержать медицинский аппарат для формирования рентгеновских изображений, включающий в себя рентгеновский источник и детектор (21) рентгеновского изображения, при этом система управления устройства дополнительно содержит третью подсистему, которая включает в себя функции управления, относящиеся к управлению операциями медицинского аппарата для формирования рентгеновских изображений, для формирования информации о краниальном рентгеновском снимке и для генерирования КТ-реконструкции краниальной анатомической структуры. Упомянутая по меньшей мере одна камера для фотографирования движения элементов отслеживания может быть выполнена таким образом, что она является физической частью медицинского аппарата для формирования рентгеновских изображений.
Что касается медицинского рентгеновского аппарата, он может содержать первую структуру, несущую рентгеновский источник и детектор рентгеновского изображения, и вторую структуру, поддерживающую первую структуру. Упомянутая по меньшей мере одна камера может быть соединена либо с первой структурой, либо со второй структурой. Предпочтительно, устройство содержит две камеры, расположенные на расстоянии друг от друга на первой структуре, несущей упомянутые рентгеновский источник и детектор рентгеновского изображения. Кроме того, медицинский прибор для формирования рентгеновских изображений может содержать источник света, расположенный в непосредственной близости от упомянутой по меньшей мере одной камеры, а источник (23) света способен излучать свет по существу в том направлении, в котором нацелена по меньшей мере одна камера.
Дисплей устройства может быть соединен со структурами медицинского аппарата для формирования рентгеновских изображений, а система управления выполнена с возможностью визуализировать на дисплее цифровую модель, показывающую движение твердой ткани, в соответствии с упомянутым сфотографированным движением, обнаруженным по меньшей мере одной камерой. Предпочтительно, система управления выполнена с возможностью визуализировать движение цифровой модели, генерируемой второй подсистемой, по существу в то же самое время, когда первая подсистема управляет упомянутой по меньшей мере одной камерой для фотографирования движения реперных объектов. Цифровая модель, изображающая твердую ткань, может быть визуализацией КТ-реконструкции челюсти или челюстей человека, генерированной на основе данных об изображении, которые обнаруживаются детектором рентгеновского изображения медицинского аппарата для формирования рентгеновских изображений.
В соответствии с одним вариантом осуществления пользовательский интерфейс, установленный вместе с системой управления, выполнен с возможностью осуществлять маркировку интересующего признака на цифровой модели, изображающей твердую ткань, и включать эту маркировку в упомянутую динамическую цифровую модель. Система управления может быть выполнена с возможностью представлять на дисплее изображение, которое является визуализацией КТ-реконструкции по меньшей мере какой-либо части краниальной анатомической структуры человека, вместе с элементом отслеживания, включающим в себя реперные объекты, прикрепленные к человеку, когда визуальная информация для упомянутой визуализации была получена, и, в ответ на входную информацию пользователя, указывающую местоположения реперных объектов упомянутого элемента отслеживания на упомянутом изображении, генерировать эталонную модель, определяющую пространственную взаимосвязь между упомянутыми реперными объектами и КТ-реконструкцией.
Настоящее изобретение обеспечивает преимущество, состоящее в том, что оно объединяет аппарат для формирования рентгеновских изображений с системой камеры слежения за движением челюсти, физически расположенной на нем. Это улучшает рабочий процесс формирования изображений и позволяет управлять КТ-аппаратом и системой камеры слежения за движением с помощью одной и той же системы управления.
Благодаря размещению системы камеры слежения за движением челюсти на самом аппарате для формирования рентгеновских изображений, настоящий процесс создает возможность как для генерирования КТ-реконструкции, которая включает в себя анатомическую структуру и элементы отслеживания (т.е. сканирования анатомической структуры, когда элементы отслеживания прикреплены к человеку), так и для отслеживания движения челюсти в течение той же процедуры, пока человек присутствует и доступен для формирования изображений на аппарате для формирования рентгеновских изображений. Следовательно, например, нет необходимости вызова человека для визуализации и повторного прикрепления элементов отслеживания в случае, когда кто-либо обращает внимание на любую ошибку в процессе или проблемы в качестве изображения, так как человек по-прежнему присутствует для любой повторной съемки или выполнения дополнительных движений челюсти.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам отслеживания движения челюсти пациента. Устройство для отслеживания движения челюсти человека содержит по меньшей мере одну камеру, выполненную с возможностью фотографировать движение элементов отслеживания, содержащих реперные объекты и прикрепленных к нижней челюсти человека и к верхней челюсти человека или к части анатомической структуры человека, которая находится в неподвижном соединении с верхней челюстью, систему управления, включающую в себя первую подсистему для управления операциями по меньшей мере одной камеры, и вторую подсистему, содержащую средства обработки визуальной информации для обнаружения проекций и определения позиций элемента отслеживания на изображениях, захваченных по меньшей мере одной камерой, и для использования этой информации применительно к цифровой модели, изображающей твердую ткань по меньшей мере нижней челюсти, а также для генерирования динамической цифровой модели, подлежащей показу на дисплее, который визуализирует движение твердой ткани нижней челюсти в соответствии со сфотографированным движением реперных объектов, при этом устройство дополнительно содержит медицинский аппарат для формирования рентгеновских изображений, имеющий рентгеновский источник и детектор рентгеновского изображения, а система управления дополнительно содержит третью подсистему, которая включает в себя функции управления, относящиеся к управлению операциями аппарата для формирования рентгеновских изображений для получения информации краниального рентгеновского снимка и для генерирования КТ-реконструкции краниальной анатомической структуры, при этом по меньшей мере одна камера, предназначенная для фотографирования движения элементов отслеживания, является физической частью медицинского аппарата для формирования рентгеновских изображений. Способ отслеживания движения челюсти человека включает прикрепление первого элемента отслеживания, содержащего реперные объекты, к нижней челюсти человека, и второго элемента отслеживания, содержащего реперные объекты, к части анатомической структуры человека, которая находится в неподвижном соединении с верхней челюстью человека, генерирование КТ-реконструкции, включающей в себя твердую ткань анатомических структур, к которым прикреплены элементы отслеживания, определение местоположений реперных объектов по отношению к анатомическим структурам твердой ткани, захват серии изображений реперных объектов в то время, когда человек выполняет движение челюсти, обнаружение местоположений реперных объектов по захваченным изображениям, определение позиций анатомических структур твердой ткани с использованием обнаруженных местоположений реперных объектов и установленной взаимосвязи между местоположениями реперных объектов и анатомическими структурами твердой ткани и перенос найденных позиций в систему визуализации для показа цифровой модели движения анатомических структур твердой ткани в соответствии с движением челюсти человека, при этом упомянутую серию изображений захватывают по меньшей мере одной камерой, расположенной на аппарате КТ-визуализации. Использование изобретений позволяет улучшить цифровую модель челюсти. 2 н. и 17 з.п. ф-лы, 7 ил.
Комментарии