Система и способ для визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, а также постоянный машиночитаемый носитель - RU2735068C1
Код документа: RU2735068C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к картированию полости тела.
УРОВЕНЬ ТЕХНИКИ
Медицинские изображения различных частей тела могут быть сформированы множеством способов, включая, помимо прочего, рентгеновскую рентгенографию, магнитно-резонансную томографию (МРТ), медицинскую ультрасонографию или ультразвуковое исследование, эндоскопию, эластографию, тактильную визуализацию, термографию, медицинскую фотографию и функциональные методики визуализации ядерной медицины.
Были разработаны методики объемной визуализации, позволяющие с помощью программного обеспечения для компьютерной томографии (КТ), МРТ и ультразвукового исследования создавать трехмерные (3D) изображения для врача. Традиционно КТ- и МРТ-сканирования создавали на пленке двухмерные (2D) статические выходные данные. Для получения 3D изображений выполняется множество сканирований, которые затем объединяются компьютерами для получения 3D модели, которой врач может манипулировать. 3D ультразвуковые исследования производятся с использованием сходной методики.
При попытке представления трехмерного (3D) изображения части тела, такой как камера сердца, на двумерном (2D) экране ручной поворот трехмерного (3D) изображения с помощью пользовательского интерфейса позволяет пользователю визуально осмотреть различные стороны 3D изображения.
В патентной публикации США № 2015/0049081 описан способ медицинской визуализации на основе программного обеспечения, включающий: определение трехмерной модели анатомического элемента конкретного млекопитающего; автоматическое выявление свободного прохода через анатомический элемент в трехмерном пространстве; аппроксимацию сглаженной кривой к свободному проходу; и отображение анатомического элемента и визуального представления сглаженной кривой пользователю в трехмерной системе визуализации.
В патенте США № 4630203 описан способ и устройство для восстановления трехмерных координат выявляемого контура на объекте без использования маркеров или уже существующей информации о геометрии объекта. Методика определяется как контурная рентгенография. В предпочтительном варианте осуществления два источника рентгеновского излучения облучают объект, обладающий рентгенографически определяемым контуром, а затем два изображения контура проецируются на рентгеновскую пленку в разнесенных друг от друга местоположениях на плоскости пленки. Эти изображения оцифровывают путем трассировки кривых изображения с помощью курсора или каких-либо других средств, таким образом устанавливая координаты произвольного числа точек изображения. Полученные таким образом цифровые данные обрабатываются в соответствии с алгоритмом контурной радиографии (CONRAD) для определения соответствующих точек на двух кривых, которые начинаются из одной и той же точке на физическом контуре. Пространственные координаты источников рентгеновского излучения определяют с использованием специальной системы калибровки. Затем координаты каждой соответствующей пары точек обрабатываются вместе с пространственными координатами источника рентгеновского излучения для определения трехмерных координат их исходных точек пространства на контуре. Таким образом, определяют трехмерные координаты контура. Затем трехмерные координаты обрабатывают в коммерчески доступной графической системе для визуального отображения реконструированного контура. Данная методика имеет конкретное применение в медицине для определения неискаженной формы, положения, размера и ориентации выбранных внутренних органов, таких как кость, которые имеют рентгенографически определяемый контур.
В патентной публикации США № 2002/0039400 описана система и способ создания трехмерной визуализации изображения объекта, такого как орган, с использованием методики визуализации объема и исследования изображения с использованием системы управляемой навигации, которая позволяет оператору перемещаться вдоль заданной траектории и настраивать вид на конкретную часть интересующего изображения для определения, например, полипов, кист или других патологических особенностей в визуализированном органе. Также можно выполнять электронную биопсию с выявленным ростом или массой в визуализированном объекте. Можно улучшить виртуальную колоноскопию за счет электронного удаления из изображения толстой кишки остаточного стула, жидкости и не относящейся к толстой кишке ткани посредством использования подготовки кишечника к операции с последующим проведением операций сегментирования изображения. Способы также используются для виртуально расширяющихся областей коллапса толстой кишки с использованием результатов сегментирования изображения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним вариантом осуществления настоящего изобретения предложена система визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, содержащая: дисплей и схему обработки, выполненную с возможностью получения трехмерной (3D) карты внутренней поверхности полости внутри тела живого субъекта, причем местоположения на внутренней поверхности определяются в сферической системе координат, в которой каждое местоположение определяется парой угловых координат и соответствующим радиальным расстоянием от начала сферической системы координат; проецирования пары угловых координат соответствующих местоположений с внутренней поверхности в соответствующие местоположения на двухмерной (2D) плоскости в соответствии с заданным преобразованием системы координат; вычисления соответствующих значений подъема от 2D плоскости в соответствующих местоположениях на основании по меньшей мере радиального расстояния, связанного с соответствующей проецируемой парой угловых координат; и визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, причем частично уплощенная поверхность приподнята от 2D плоскости в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью добавления на частично уплощенную поверхность различных цветов таким образом, что цвета указывают на вычисленные соответствующие значения подъема в соответствующих местоположениях.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью добавления контурных линий на частично уплощенную поверхность вычисленных значений подъема.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью преобразования для каждого местоположения декартовых координат внутренней поверхности в пару угловых координат и соответствующее радиальное расстояние.
Более того, в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью вычисления начала координат как центроида внутренней поверхности.
Кроме того, в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью приема пользовательского ввода, указывающего крайние точки для вычисления траектории по частично уплощенной поверхности внутренней поверхности полости, вычисления траектории между принятыми крайними точками в соответствии по меньшей мере с некоторыми из вычисленных значений подъема и визуализации траектории на частично уплощенной поверхности.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения система содержит медицинский инструмент, выполненный с возможностью введения в полость, и отслеживающий модуль, выполненный с возможностью отслеживания местоположения медицинского инструмента в полости, причем схема обработки выполнена с возможностью визуализации представления медицинского инструмента на частично уплощенной поверхности в соответствии с отслеживаемым положением.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения схема обработки выполнена с возможностью приема пользовательского ввода, указывающего новую ориентацию частично уплощенной поверхности, и визуализации на дисплее изображения частично уплощенной поверхности, причем частично уплощенная поверхность ориентирована в соответствии с новой ориентацией.
Кроме того, в соответствии с еще одним вариантом осуществления настоящего изобретения предложен способ для визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, включающий: получение трехмерной (3D) карты внутренней поверхности полости внутри тела живого субъекта, причем местоположения на внутренней поверхности определяются в сферической системе координат, в которой каждое местоположение определяется парой угловых координат и соответствующим радиальным расстоянием от начала сферической системы координат; проецирование пары угловых координат соответствующих местоположений с внутренней поверхности в соответствующие местоположения на двухмерной (2D) плоскости в соответствии с заданным преобразованием системы координат, вычисление соответствующих значений подъема от 2D плоскости в соответствующих местоположениях на основании по меньшей мере радиального расстояния, связанного с соответствующей проецируемой парой угловых координат; и визуализацию на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, причем частично уплощенная поверхность приподнята от 2D плоскости в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях.
Более того, в соответствии с одним вариантом осуществления настоящего изобретения способ включает добавление на частично уплощенную поверхность различных цветов таким образом, что цвета указывают на вычисленные соответствующие значения подъема в соответствующих местоположениях.
Кроме того, в соответствии с одним вариантом осуществления настоящего изобретения способ включает добавление контурных линий на частично уплощенную поверхность вычисленных значений подъема.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения способ включает преобразование для каждого местоположения декартовых координат внутренней поверхности в пару угловых координат и соответствующее радиальное расстояние.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения способ включает вычисление начала координат как центроида внутренней поверхности.
Более того, в соответствии с одним вариантом осуществления настоящего изобретения способ включает прием пользовательского ввода, указывающего крайние точки для вычисления траектории по частично уплощенной поверхности внутренней поверхности полости; вычисление траектории между принятыми крайними точками в соответствии по меньшей мере с некоторыми из вычисленных значений подъема; и визуализацию контура на частично уплощенной поверхности.
Кроме того, в соответствии с одним вариантом осуществления настоящего изобретения способ включает отслеживание местоположения медицинского инструмента, введенного в полость, и визуализацию представления медицинского инструмента на частично уплощенной поверхности в соответствии с отслеживаемым положением.
Дополнительно в соответствии с одним вариантом осуществления настоящего изобретения способ включает прием пользовательского ввода, указывающего новую ориентацию частично уплощенной поверхности, и визуализацию на дисплее изображения частично уплощенной поверхности, причем частично уплощенная поверхность ориентирована в соответствии с новой ориентацией.
Кроме того, в соответствии с еще одним вариантом осуществления настоящего изобретения предложен постоянный машиночитаемый носитель, в котором хранятся команды программы, причем команды при считывании центральным процессором (ЦП) обусловливают выполнение следующих функций с помощью ЦП: получение трехмерной (3D) карты внутренней поверхности полости внутри тела живого субъекта, причем местоположения на внутренней поверхности определяются в сферической системе координат, в которой каждое местоположение определяется парой угловых координат и соответствующим радиальным расстоянием от начала сферической системы координат; проецирование пары угловых координат соответствующих местоположений с внутренней поверхности в соответствующие местоположения на двухмерной (2D) плоскости в соответствии с заданным преобразованием системы координат; вычисление соответствующих значений подъема от 2D плоскости в соответствующих местоположениях на основании по меньшей мере радиального расстояния, связанного с соответствующей проецируемой парой угловых координат; и визуализацию на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, причем частично уплощенная поверхность приподнята от 2D плоскости в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение станет понятным на примере следующего подробного описания в сочетании с графическими материалами.
На Фиг 1 представлено схематическое изображение инвазивной медицинской процедуры с использованием устройства в соответствии с одним вариантом осуществления настоящего изобретения.
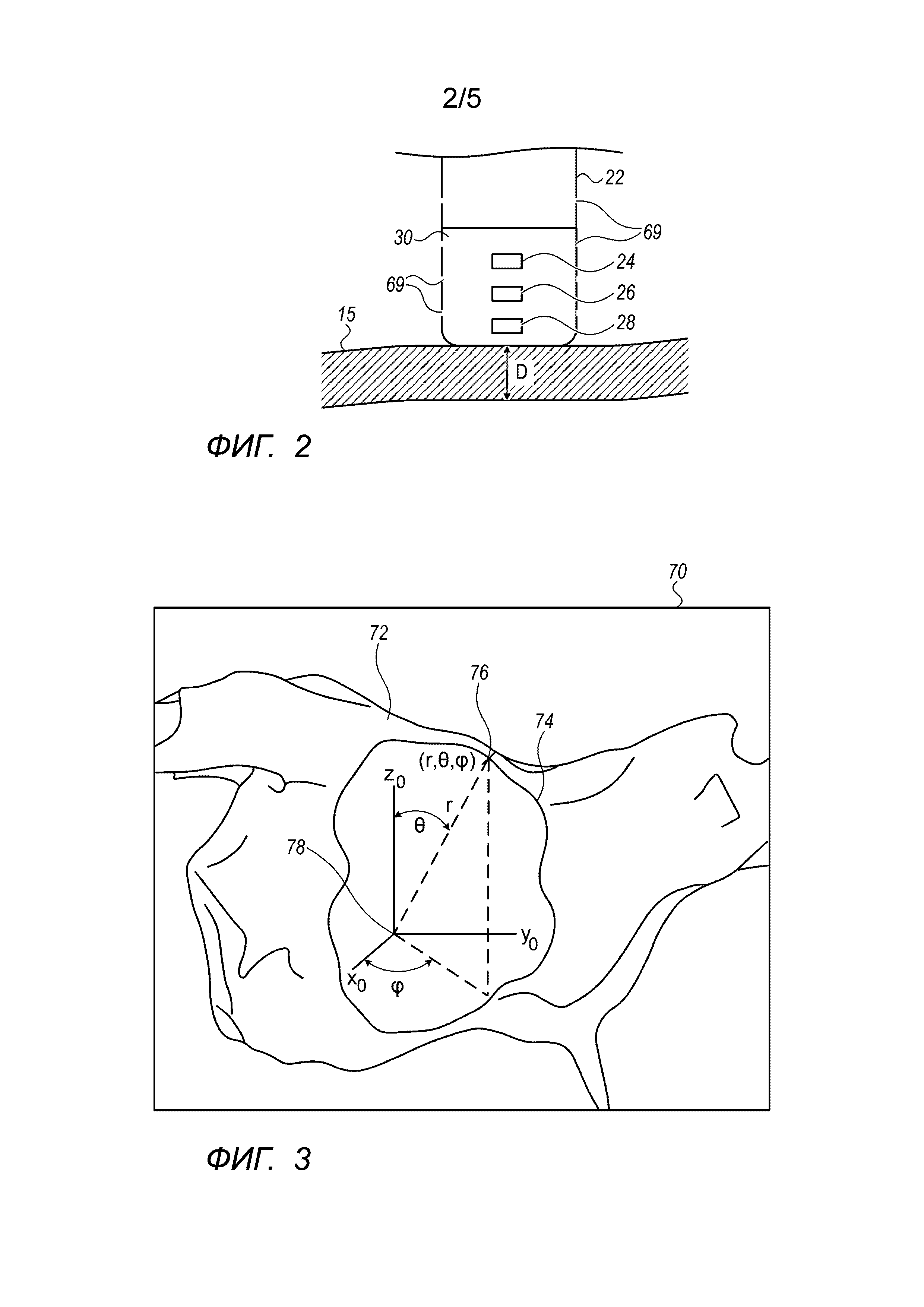
На Фиг. 2 представлено схематическое изображение дистального конца зонда, используемого в устройстве, показанном на Фиг. 1, в соответствии с одним вариантом осуществления настоящего изобретения.
На Фиг. 3 представлен вид в разрезе изображения внутренней поверхности полости внутри тела живого субъекта, принятого устройством, показанным на Фиг. 1.
На Фиг. 4 представлен вид сбоку частично уплощенной поверхности внутренней поверхности полости, показанной на Фиг. 3.
На Фиг. 5 представлен вид в горизонтальной проекции частично уплощенной поверхности, показанной на Фиг. 4.
На Фиг. 6 представлен вид в горизонтальной проекции частично уплощенной поверхности, показанной на Фиг. 4, содержащей крайние точки.
На Фиг. 7 представлен вид в горизонтальной проекции частично уплощенной поверхности, на которой показана траектория между крайними точками, показанными на фиг. 6.
На Фиг. 8 представлен вид в горизонтальной проекции частично уплощенной поверхности, на которой показано представление медицинского инструмента на траектории, показанной на Фиг. 7.
На Фиг. 9 представлена блок-схема, показывающая примеры этапов в первом способе работы устройства, показанного на Фиг. 1. и
На Фиг. 10 представлена блок-схема, показывающая примеры этапов во втором способе работы устройства, показанного на Фиг. 1.
ОПИСАНИЕ ПРИМЕРОВ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Общее описание
Как указано выше, при попытке представления трехмерного (3D) изображения части тела, такой как камера сердца, на двухмерном (2D) экране ручной поворот 3D изображения с помощью пользовательского интерфейса позволяет пользователю визуально осмотреть различные стороны 3D изображения. Такой вид осмотра ограничен, поскольку все поверхности камеры в целом не видны одновременно, что затрудняет обнаружение врачом элемента части тела, а также затрудняет для врача оценку всей части тела во взаимосвязи. Упомянутые выше недостатки могут привести к более медленным медицинским процедурам или даже медицинским ошибкам, которые в случае сердечной или аналогичной медицинских процедур могут быть фатальными.
В вариантах осуществления настоящего изобретения частично сплющена 3D карта внутренней поверхности 3D полости внутри тела живого субъекта с получением интуитивно понятной частично уплощенной поверхности. Частично уплощенная поверхность приблизительно соответствует плоскости с подъемами и понижениями, которые представляют собой различные выступы, углубления и общую форму внутренней поверхности полости. Частично уплощенная поверхность позволяет одновременно просматривать противоположные стороны внутренней поверхности полости без необходимости поворота изображения частично уплощенной поверхности. Таким образом, частично уплощенная поверхность позволяет врачу оценить всю полость во взаимосвязи без необходимости поворота частично уплощенной поверхности. Кроме того, частично уплощенная поверхность позволяет врачу легче находить элемент полости.
Местоположения внутренней поверхности полости 3D карты определяются в сферической системе координат. Каждое положение определяется парой угловых координат (θ, ϕ) и соответствующим радиальным расстоянием r от начала сферической системы координат. Начало сферической системы координат может быть вычислено как центроид полости или определено как какое-либо другое подходящее местоположение. В некоторых вариантах осуществления 3D карта может быть сначала определена с помощью декартовой или другой системы координат, которая затем преобразуется в сферическую систему координат.
Пара угловых координат (θ, ϕ) соответствующих местоположений с внутренней поверхности проецируется в соответствующие местоположения (x, y) на 2D плоскости в соответствии с заданным преобразованием системы координат. Таким образом, например, пара угловых координат (θ1, ϕ1) может быть сопоставлена с местоположением (x1, y1) на 2D плоскости. Проекции могут быть выполнены в соответствии с любым подходящим преобразованием системы координат. Проекции и подходящие преобразования системы координат более подробно описаны ниже в описании системы.
Соответствующие значения подъема от 2D плоскости в соответствующих местоположениях (x, y) вычисляются на основании по меньшей мере радиального расстояния r, связанного с соответствующей проецируемой парой угловых координат (θ, ϕ). Таким образом, например, значение подъема в местоположении x1,y1 на 2D плоскости вычисляется методом быстрого преобразования Фурье на основании радиального расстояния r1, связанного с соответствующей проецируемой парой угловых координат (θ1, ϕ1). Исключительно в качестве примера значение подъема в местоположении может быть вычислено путем умножения R на заданный коэффициент, где R равно соответствующему радиальному расстоянию r или соответствующему радиальному расстоянию r, которое меньше среднего радиального расстояния местоположений на внутренней поверхности полости, или соответствующему радиальному расстоянию r, которое меньше минимального радиального расстояния между местоположениями на внутренней поверхности полости. Подъемы могут проходить над и/или под 2D плоскостью (т.е. подъемы или впадины) в зависимости от того, как вычисляются соответствующие величины подъема на соответствующих радиальных расстояниях.
Изображение частично уплощенной поверхности внутренней поверхности полости визуализируется на дисплее, причем частично уплощенная поверхность поднимается от 2D плоскости (выше и/или ниже) в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях.
Дополнительно или альтернативно на частично уплощенную поверхность могут быть добавлены различные цвета таким образом, что цвета указывают на вычисленные соответствующие диапазоны значений подъема в соответствующих местоположениях. Цвета помогают врачу увидеть различные подъемы и впадины частично уплощенной поверхности, особенно когда частично уплощенная поверхность рассматривается непосредственно сверху (например, в горизонтальной проекции).
Дополнительно или альтернативно на частично уплощенную поверхность могут быть добавлены контурные линии в соответствии с вычисленными значениями подъема. Контурные линии также помогают врачу увидеть различные подъемы и впадины частично уплощенной поверхности, особенно когда частично уплощенная поверхность рассматривается непосредственно сверху (например, в горизонтальной проекции).
Врач может манипулировать частично уплощенной поверхностью таким образом, чтобы ее можно было видеть в различных ориентациях. В частности, некоторые ориентации позволяют врачу видеть на поверхности большую часть подъемов (и/или впадин). В связи с этим может быть принят пользовательский ввод, указывающий, что пользователь выбрал новую ориентацию частично уплощенной поверхности. Затем изображение частично уплощенной поверхности обрабатывают и визуализируют таким образом, чтобы частично уплощенная поверхность была ориентирована в соответствии с новой ориентацией.
Частично уплощенная поверхность может обеспечивать лучшее планирование маршрута для перемещения медицинского инструмента по внутренней поверхности и/или просмотра местоположения медицинского инструмента относительно внутренней поверхности.
Цвета и/или контурные линии также могут позволить врачу планировать траекторию между двумя крайними точками, избегая при этом подъемов и впадин.
Дополнительно или альтернативно от пользователя может приниматься пользовательский ввод, указывающий крайние точки для вычисления траектории по частично уплощенной поверхности внутренней поверхности полости. Затем может быть вычислена траектория между принятыми крайними точками в соответствии по меньшей мере с некоторыми из вычисленных значений подъема таким образом, чтобы вычисленная траектория избегала отклонений подъема выше заданного предела. Затем траектория может быть визуализирована на частично уплощенной поверхности.
В некоторых вариантах осуществления местоположение медицинского инструмента в полости может отслеживаться с использованием любой подходящей технологии отслеживания местоположения. Затем представление медицинского инструмента может быть визуализировано на частично уплощенной поверхности в соответствии с отслеживаемым положением.
Описание системы
Документы, включенные в настоящий документ путем ссылки, следует рассматривать как неотъемлемую часть заявки, за исключением того, что, если определения терминов в этих включенных документах противоречат определениям, данным явно или неявно в настоящем описании, следует учитывать только определения, приведенные в настоящем описании.
Обратимся теперь к Фиг. 1, на которой представлено схематическое изображение инвазивной медицинской процедуры с использованием устройства 12, содержащего медицинскую аналитическую подсистему в соответствии с одним вариантом осуществления настоящего изобретения. Также обратимся к Фиг. 2 на которой представлено схематическое изображение дистального конца 22 зонда 20, используемого в устройстве 12 в соответствии с одним вариантом осуществления настоящего изобретения. Процедуру выполняет врач 14, и в приведенном ниже описании, процедура предполагает выполнение абляции участка ткани 15 миокарда 16 сердца пациента-человека 18.
Для выполнения исследования врач 14 вводит зонд 20 в оболочку 21, которая ранее была предварительно расположена в полости пациента 18 таким образом, что зонд 20 вставляется в камеру сердца. Оболочка 21 расположена так, чтобы дистальный конец 22 зонда 20 входил в сердце пациента 18. Дистальный конец 22 содержит датчик 24 положения, который позволяет отслеживать местоположение и ориентацию дистального конца 22, датчик 26 усилия, который измеряет усилие, приложенное дистальным концом 22 при контакте с миокардом 16, а также один или более датчиков 28 температуры, которые измеряют температуру в соответствующих местах дистального конца 22. Дистальный конец 22 также содержит один или более электродов 30, которые используются для подачи радиочастотной энергии к миокарду 16 в камере сердца для абляции миокарда 16. Электрод(-ы) 30 также можно использовать для получения электрических потенциалов от миокарда 16.
Устройство 12 управляется системным процессором 46, который расположен в пульте 48 управления устройства. Пульт 48 управления содержит элементы управления по меньшей мере одного устройства 49 ввода пользователя, которые используются врачом 14 для взаимодействия с процессором 46. Программное обеспечение для процессора 46 можно загружать в процессор 46 в электронном виде, например, по сети. Альтернативно или дополнительно программное обеспечение может быть обеспечено на энергонезависимом материальном носителе, таком как оптический, магнитный или электронный накопитель.
Процессор 46 может содержать схему 45 подавления шума в режиме реального времени, обычно выполненную в виде программируемой пользователем вентильной матрицы (ППВМ), за которой следует интегральная схема 47 аналого-цифрового преобразователя (АЦП). Процессор 46 может передавать сигнал от интегральной схемы 47 аналого-цифрового преобразователя к другому процессору и/или он может быть запрограммирован на выполнение по меньшей мере одного алгоритма, описанного в настоящем документе, причем алгоритм включает этапы, описанные ниже в настоящем документе. Процессор 46 использует схему 45 подавления шума и интегральную схему 47 аналого-цифрового преобразователя, а также элементы модулей, которые более подробно описаны ниже, для выполнения алгоритма.
Для управления устройством 12 алгоритм процессора 46 взаимодействует с банком 50 модулей, который содержит ряд модулей, используемых процессором 46 для управления устройством 12. Таким образом, банк 50 модулей содержит модуль 56 электрокардиографа (ЭКГ), подсоединенный для приема сигналов от электродов 31 на поверхности тела и/или электродов 30, для подачи сигналов ЭКГ на процессор 46. Электроды 31 на поверхности тела и/или электрод(-ы) 30 выполнены с возможностью приложения к телу субъекта (например, пациенту 18) и выполнены с возможностью вывода сигналов в ответ на электрическую активность сердца субъекта. Электрод(-ы) 30 прикладывают к сердцу организма при помощи зонда 20. Также банк 50 модулей содержит отслеживающий модуль 58, который принимает и анализирует сигналы от датчика 24 положения и который использует анализ сигнала для генерации данных о местоположении и ориентации дистального конца 22. В некоторых вариантах осуществления датчик 24 положения содержит одну или более катушек, которые обеспечивают сигналы от датчика, реагируя на магнитные поля, проходящие через катушки. В этих вариантах осуществления в дополнение к приему и анализу сигналов от датчика 24 отслеживающий модуль 58 также управляет излучателями 32, 34 и 36, которые излучают магнитные поля, проходящие через датчик 24 положения. Излучатели 32, 34, 36 расположены рядом с миокардом 16 и выполнены с возможностью излучения переменных магнитных полей в область вблизи миокарда 16. Множество проводных соединений 35 соединяют пульт 48 управления с электродами 31 на поверхности тела и другими компонентами (такими как излучатели 32, 34, 36 и датчик 24), чтобы обеспечить измерение посредством отслеживающего модуля 58 координат местоположения и ориентации зонда 20. В некоторых вариантах осуществления отслеживающий модуль 58 выполнен с возможностью вычисления относительного местоположения и относительной ориентации зонда 20 относительно сердца. Магнитное отслеживание местоположения и ориентации описано в патентах США № 7756576 и 7536218, которые включены в настоящий документ посредством ссылки. Такую систему магнитного отслеживания используют в системе Carto, выпускаемой компанией Biosense Webster, 33 Technology Drive, г. Ирвайн, штат Калифорния, 92618, США. Отслеживающий модуль 58 не ограничивается использованием магнитного отслеживания местоположения и ориентации. Можно использовать любое подходящее отслеживание местоположения и ориентации, такое как отслеживание на основе импеданса или на основе изображения.
Устройство 12 может принимать данные изображения от внешнего устройства визуализации, например установки МРТ, установки КТ или т.п., и включает в себя процессоры обработки изображений, которые могут быть встроены в процессор 46 или могут запускаться им для создания и отображения изображений. Данные изображения могут регистрироваться с помощью отслеживающего модуля 58, при этом экран 70 пользовательского интерфейса, объединяющий принятые данные и положения зонда 20, может быть отображен врачу 14 на дисплее 61. Например, след дистального конца 22 зонда 20 может быть показан на трехмерном (3D) представлении сердца пациента 18, которое отображается на дисплее 61. В некоторых вариантах осуществления 3D представление сердца может быть по меньшей мере частично вычислено на основании картирования, выполняемого зондом 20.
Электрод(-ы) 30 и электроды 31 на поверхности тела могут применяться для измерения импеданса ткани на участке абляции, как указано в патенте США № 7536218, который включен в настоящий документ посредством ссылки.
Банк 50 модулей также содержит модуль 60 усилия, блок 62 питания, модуль 64 орошения и температурный модуль 66. Функции этих модулей описаны ниже. Модули в банке 50 модулей и процессор 46 в настоящем документе называются схемой 51 обработки.
Модуль 60 усилия принимает сигналы от датчика 26 усилия и из сигналов генерирует величину контактного усилия, которое, как предполагается в настоящем документе, измеряется в граммах, и прикладывается дистальным концом 22 к ткани 15. В некоторых вариантах осуществления датчик 26 усилия выполнен таким образом, что сигналы, которые он подает на модуль 60 усилия, позволяют модулю 60 усилия оценивать направление усилия, прикладываемого дистальным концом 22 к ткани 15.
Блок 62 питания содержит генератор 63 радиочастотного (РЧ) сигнала, который генерирует радиочастотную энергию, используемую электродом(-ами) 30 для абляции ткани 15 миокарда 16. Процессор 46 и блок 62 питания могут регулировать уровень мощности, который, как предполагается в настоящем документе, измеряется в Ваттах, подаваемой электродом(-ами) 30, а также период времени, измеренный в секундах, в течение которого подается мощность.
Модуль 64 орошения управляет скоростью потока, которая, как предполагается в настоящем документе, измеряется в мл/мин, орошающей жидкости, как правило, нормального физиологического раствора, подаваемого на дистальный конец 22 насосом 65, расположенным в пульте 48 управления. Зонд 20 содержит канал для орошения, через который происходит орошение миокарда 16. Орошающая жидкость вытесняется из орошающих отверстий 69 в дистальном конце 22. Насос 65 выполнен с возможностью селективного закачивания орошающей жидкости в канал для орошения со скоростью холостого хода и с одной или более скоростями без холостого хода (выше скорости холостого хода) в соответствии с состоянием процедуры абляции.
Температурный модуль 66 принимает сигнал температуры, подаваемый датчиком 28 температуры (или каждым датчиком 28 температуры). Температурный сигнал служит показателем температуры миокарда во множестве разных временных точек. Температурный модуль 66 определяет температуры, зарегистрированные каждым из датчиков 28. Обычно в случае множества датчиков 28 температурный модуль 66 определяет среднюю температуру дистального конца 22. Кроме того, в случае множества датчиков температурный модуль 66 может формировать карту распределения температуры дистального конца 22.
Обратимся теперь к Фиг. 3-10, на которых проиллюстрировано создание, манипуляция и использование частично уплощенной поверхности 80 (показана на Фиг. 4-8) внутренней поверхности 72 (показана на Фиг. 3) полости внутри тела живого субъекта. Полость может представлять собой любую подходящую полость внутри тела живого субъекта, например, помимо прочего, камеру сердца или полость синуса. Изображение частично уплощенной поверхности 80 может отображаться с помощью устройства 12 на дисплее 61 или с использованием любой подходящей системы обработки и отображения и не ограничивается отображением с помощью устройства 12 на дисплее 61.
Обратимся теперь к Фиг. 3, которая представляет собой вид в разрезе изображения 70 внутренней поверхности 72 полости внутри тела живого субъекта, принятого устройством 12, показанным на Фиг. 1. В некоторых вариантах осуществления изображение 70 может быть создано устройством 12. Срез 74 была срезан от внутренней поверхности 72 для того, чтобы показать, как определяются положения 76 (исключительно для простоты). Местоположения 76 на внутренней поверхности 72 могут быть определены в сферической системе координат, в которой каждое местоположение 76 определяется координатами (r, θ, ϕ), включая пару угловых координат (θ, ϕ) и соответствующее радиальное расстояние r от начала 78 сферической системы координат. Полярный угол θ измеряется от фиксированного зенитного направления (ось z0 на Фиг. 3), а азимутальный угол ϕ, измеряется на плоскости отсчета (определяемой осью x0 и осью y0), которая проходит через начало 78 системы координат и расположена перпендикулярно зенитному углу, измеренному при фиксированном направлении координатной оси (от оси x0) на этой плоскости. Для удобства полярный угол θ имеет значения от 0 до 180 градусов, а азимутальный угол, ϕ, имеет значения от 0 до 360 градусов. Определение диапазонов, охватываемых углами θ, ϕ, может быть изменено на любой подходящий диапазон. Например, θ может составлять от 0 до 360, а ϕ может составлять от -90 до +90 градусов. Углы также можно измерять в радианах или любых подходящих единицах. В других вариантах осуществления местоположения 76 могут быть определены в соответствии с любой подходящей системой координат.
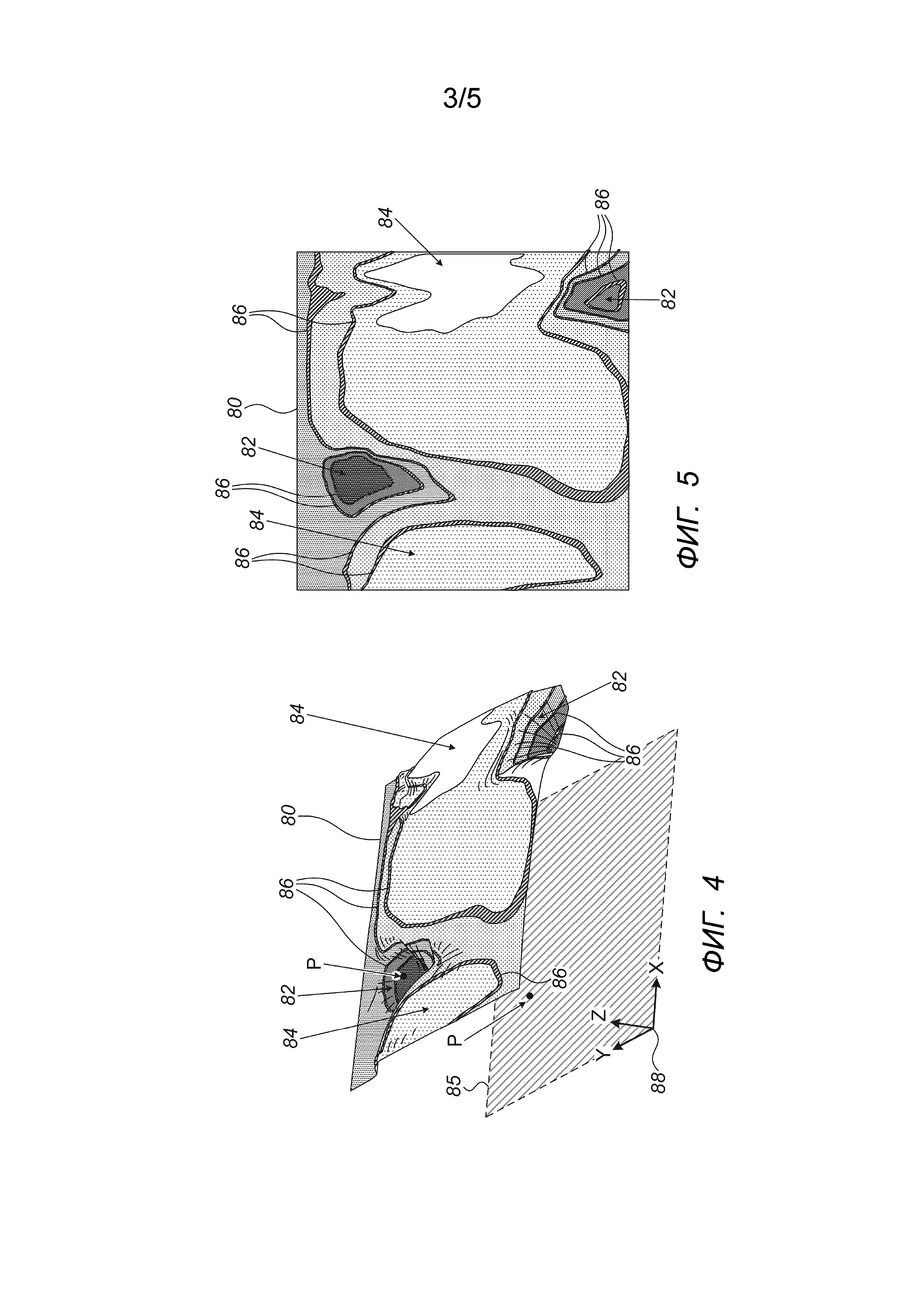
Обратимся теперь к Фиг. 4, которая представляет собой вид сбоку частично уплощенной поверхности 80 внутренней поверхности 72 полости, показанной на Фиг. 3. Частично уплощенная поверхность 80 содержит впадины 82 и подъемы 84. Вычисление впадин 82 и подъемов 84 более подробно описано ниже.
Пары угловых координат (θ, ϕ) соответствующих местоположений 76 (Фиг. 3) проецируются с внутренней поверхности 72 в соответствующие местоположения на 2D плоскости 85 в соответствии с заданным преобразованием системы координат. 2D плоскость 85 может быть образована осью x и осью y системы 88 координат, например, декартовой системы координат. Таким образом, например, пара угловых координат (θ1, ϕ1), имеющая радиальное расстояние, r1, может проецироваться в местоположение (x1, y1) (в соответствии с системой 88 координат, и также указанное как местоположение P на Фиг. 4) на 2D плоскости 85.
Проекции могут быть выполнены в соответствии с любым подходящим преобразованием системы координат. Например, когда полярный угол, θ, имеет значения от 0 до 180 градусов, при этом азимутальный угол, ϕ, имеет значения от 0 до 360 градусов, пара угловых координат может проецироваться на прямоугольную 2D плоскость, которая имеет значения оси x от 0 до 180, а оси y от 0 до 360. Масштаб осей x и/или y может быть линейным или нелинейным. Для каждой пары угловых координат (θ, ϕ) полярный угол, θ, можно проецировать на соответствующее значение оси x, а азимутальный угол, ϕ, можно проецировать на соответствующее значение оси y. Например, пара угловых координат (95°, 280°) проецируется на координаты (x=95, y=280) 2D плоскости 85.
Можно использовать и другие способы проецирования для проецирования местоположений 76 на внутренней поверхности 72 на 2D плоскость 85. Проекция может отличаться в зависимости от выбранной проекционной поверхности (например, проекция на цилиндр или конус), аспекта проекции (как внутренняя поверхность 72 ориентирована относительно выбранной проекционной поверхности), используемого масштабирования и выбора модели для формы внутренней поверхности 72 (например, сфера или эллипсоид). Другие возможные способы проецирования, исключительно в качестве примера, включают в себя равнопрямоугольную проекцию, проекцию Кассини, проекцию Меркатора, проекцию Миллера, проекцию Бермана, синусоидальную проекцию, проекцию Эккерта, проекцию Ван дер Гринтена.
Соответствующие значения подъема от 2D плоскости 85 в соответствующих местоположениях (x, y) вычисляются на основании по меньшей мере радиального расстояния r, связанного с соответствующей проецируемой парой угловых координат (θ, ϕ). Таким образом, например, значение подъема в местоположении P с координатами x1, y1 на 2D плоскости 85 вычисляется методом быстрого преобразования Фурье на основании радиального расстояния r1, связанного с соответствующей проецируемой парой угловых координат (θ1, ϕ1).
Значение подъема в местоположении может быть вычислено путем умножения R на заданный коэффициент масштабирования, где R равно одному из следующего: (a) соответствующее радиальное расстояние r; (b) соответствующее радиальное расстояние r, которое меньше среднего радиального расстояния между местоположениями на внутренней поверхности полости; или (c) соответствующее радиальное расстояние r, которое меньше минимального радиального расстояния между местоположениями на внутренней поверхности полости, только в качестве примера. В зависимости от способа вычисления величины подъема величина подъема может привести к положительному или отрицательному значению, соответствующему подъему выше или впадине ниже 2D плоскости 85 (параллельно оси z системы 88 координат), соответственно.
Например, если радиальное расстояние составляет r1, среднее радиальное расстояние составляет rav, минимальное радиальное расстояние составляет rmin, а коэффициент масштабирования равен 0,5, при этом значение подъема может быть вычислено любым из следующих способов:
1. 0,5 x r1;
2. 0,5 x (r1 - rav); или
3. 0,5 x (r1 - rmin).
Частично уплощенная поверхность 80 визуализируется с помощью впадин 82 и подъемов 84 в соответствии с вычисленными значениями подъема. В частности, частично уплощенная поверхность 80 визуализируется таким образом, чтобы местоположения на ее поверхности располагались на расстоянии (измеренном параллельно оси z системы 88 координат) от соответствующих местоположений на 2D плоскости 85, равном вычисленным соответствующим значениям подъема соответствующих местоположений. Таким образом, например, для пары угловых координат (θ1, ϕ1), имеющих радиальное расстояние, r1, сопоставленное с местоположением (x1, y1) в системе 88 координат и имеющее вычисленное значение подъема E1, координата соответствующего местоположения частично уплощенной поверхности 80 задается (x1, y1, E1) в системе 88 координат.
На частично уплощенную поверхность 86 также нанесены контурные линии 80 для выделения линий одинаковой высоты, а также для облегчения идентификации врачом 14 впадин 82 и подъемов 84, а также крутизны впадин 82 и подъемов 84. Детализация контурных линий может определяться пользователем. В некоторых вариантах осуществления детализация контурных линий может быть вычислена процессором 46 таким образом, что диапазон значений подъема делится на заданное число контурных линий. Например, если минимальное и максимальное значения подъема составляют 5 см и 8 см, соответственно, а заданное число контурных линий 6, контурные линии представляют собой переходы со значением подъема 0,5 см.
На частично уплощенную поверхность 80 также были добавлены цвета для указания разных диапазонов значений подъема с помощью различных цветов. Цвета также облегчают идентификацию врачом 14 впадин 82 и подъемов 84. Диапазоны значений подъема, связанные с различными цветами, могут настраиваться пользователем. В некоторых вариантах осуществления различным диапазонам значений подъема цвета могут присваиваться автоматически. Дополнительно или альтернативно число и/или размер диапазона значений подъема может настраиваться пользователем.
Врач 14 может манипулировать частично уплощенной поверхностью 80 таким образом, чтобы поверхность 80 можно было видеть в различных ориентациях. В частности, некоторые ориентации позволяют врачу видеть на поверхности большую часть подъемов (и/или впадин). Например, на виде частично уплощенной поверхности 80 на Фиг. 4 впадины 82 и подъемы 84 показаны более четко, чем в горизонтальной проекции частично уплощенной поверхности 80, показанной на Фиг. 5.
Обратимся теперь к Фиг. 5, которая представляет собой вид в горизонтальной проекции частично уплощенной поверхности 80, показанной на Фиг. 4. Если смотреть сверху, впадины 82 и подъемы 84 без использования цветов и/или контурных линий 86 могут быть не такими явными. Цвета и/или контурные линии 86 помогают врачу 14 увидеть различные подъемы частично уплощенной поверхности 80, особенно когда частично уплощенная поверхность рассматривается непосредственно сверху (например, в горизонтальной проекции).
Обратимся теперь к Фиг. 6, которая представляет собой вид в горизонтальной проекции частично уплощенной поверхности 80, показанной на Фиг. 4, содержащей крайние точки 90, 92. Крайние точки 90, 92 могут быть обозначены пользователем для определения начала и конца требуемой траектории по внутренней поверхности 72 полости. Пользователю может потребоваться увидеть вычисленную траекторию между крайними точками 90, 92 на основании поддержания значений подъема в том же диапазоне, который может включать в себя, например, одно или более из следующего: не пересекающий одну из контурных линий 86, не пересекающий две из контурных линий 86 и т.д., и/или не превышающий заданное положительное и/или отрицательное значение подъема во время вычисления траектории в целом или, даже, на данном участке или участках вычисленной траектории. Крайние точки 90, 92 могут вводится пользователем с помощью подходящего экрана пользовательского интерфейса, который отображает частично уплощенную поверхность 80 и позволяет пользователю добавлять крайние точки 90, 92 на частично уплощенную поверхность 80 с помощью подходящего указывающего устройства, исключительно для примера, такого как мышь или стилус. Крайние точки 90, 92 могут быть добавлены на частично уплощенную поверхность 80 пользователем в той ориентации, в которой в данный момент отображается частично уплощенная поверхность 80.
Обратимся теперь к Фиг. 7, которая представляет собой вид в горизонтальной проекции частично уплощенной поверхности 80, на которой показана траектория 94 между крайними точками 90, 92, показанными на Фиг. 6. Траектория 94 вычисляется между крайними точками 90, 92 на основании поддержания траектории 94 в том же диапазоне значений подъема, который может включать в себя, например, одно или более из следующего: не пересекающий одну из контурных линий 86, не пересекающий две из контурных линий 86 и т. д., и/или не превышающий заданное положительное и/или отрицательное значение подъема во время вычисления траектории в целом или, даже, на заданном участке или участках вычисленной траектории.
Обратимся теперь к Фиг. 8, которая представляет собой вид в горизонтальной проекции частично уплощенной поверхности 80, на которой показано представление 96 медицинского инструмента на траектории 94, показанной на Фиг. 7. Местоположение медицинского инструмента может отслеживаться, и отслеживаемое местоположение медицинского инструмента относительно частично уплощенной поверхности 80 может быть показано с помощью представления 96. Представление 96 в целом перемещается по мере перемещения отслеживаемого местоположения медицинского инструмента.
Примером медицинского инструмента является зонд 20, показанный на Фиг. 1 и 2. Однако медицинский инструмент может представлять собой любой подходящий медицинский инструмент, такой как, исключительно для примера, неабляционный зонд для введения в часть тела, эндоскоп и/или хирургический инструмент, такой как ЛОР-инструмент, аспирационный инструмент, микродебридер или шейвер.
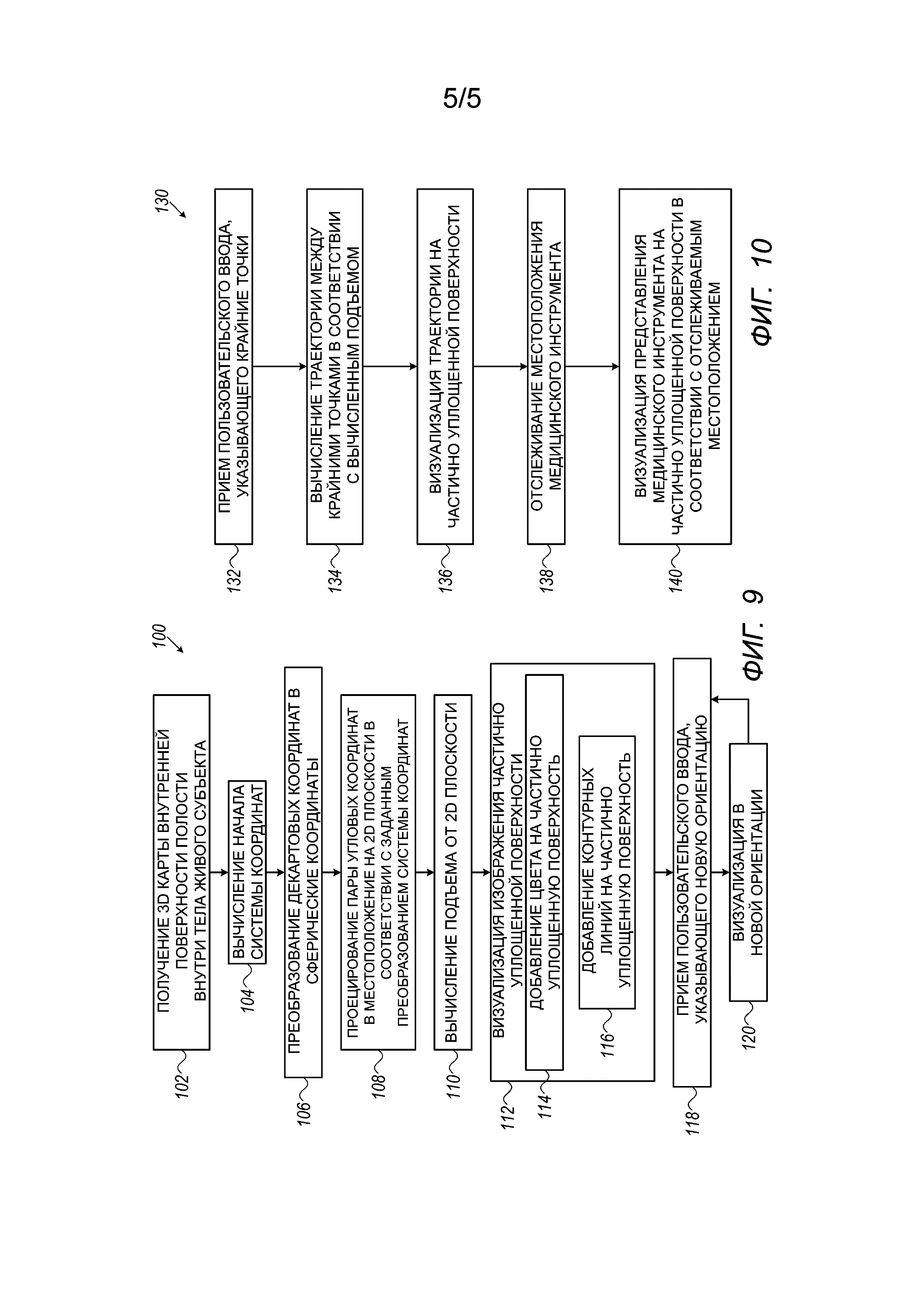
Обратимся теперь к Фиг. 9, которая представляет собой блок-схему 100, содержащую примеры этапов в первом способе работы устройства 12, показанного на Фиг. 1. Процессор 46 (Фиг. 1) выполнен с возможностью приема (блок 102) 3D карты внутренней поверхности 72 (Фиг. 3) полости внутри тела живого субъекта. Процессор 46 выполнен с возможностью вычисления (блок 104) начала 78 системы координат (Фиг. 3) как центроида внутренней поверхности 72. В некоторых вариантах осуществления начало 78 системы координат может представлять собой любую подходящую точку в или на или, даже, снаружи внутренней поверхности 72.
Если внутренняя поверхность 72 еще не определена сферической системой координат, процессор 46 выполнен с возможностью преобразования (блок 106) координат (например, декартовых координат) для местоположений 76 (Фиг. 3) на внутренней поверхности 72 в сферические координаты, причем каждое местоположение 76 определяется парой угловых координат (θ, ϕ) и соответствующим радиальным расстоянием r от начала 78 системы координат. Процессор 46 выполнен с возможностью проецирования (блок 108) пары угловых координат, (θ, ϕ), соответствующих местоположений 76 с внутренней поверхности 72 в соответствующие местоположения (x, y) на 2D плоскости 85 (Фиг. 4) в соответствии с заданным преобразованием системы координат. Процессор 46 выполнен с возможностью вычисления (блок 110) соответствующих значений подъема от 2D плоскости 85 в соответствующих местоположениях на основании по меньшей мере радиального расстояния, r, связанного с соответствующей проецируемой парой угловых координат, (θ, ϕ).
Процессор 46 выполнен с возможностью визуализации (блок 112) на дисплее 61 изображения частично уплощенной поверхности 80 (Фиг. 4, 5) внутренней поверхности полости 72, причем частично уплощенная поверхность 80 приподнята от 2D плоскости в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях. В качестве части этапа визуализации блока 112 могут выполняться промежуточные этапы блоков 114 и/или 116. Процессор 46 может быть выполнен с возможностью добавления (блок 114) контурных линий 86 (Фиг. 4 и 5) на частично уплощенную поверхность 80 в соответствии с вычисленными значениями подъема. Процессор 46 может быть выполнен с возможностью добавления (блок 116) различных цветов на частично уплощенную поверхность 80 таким образом, что цвета указывают на вычисленные соответствующие значения подъема в соответствующих местоположениях.
Процессор 46 выполнен с возможностью приема пользовательского ввода (блок 118), указывающего новую ориентацию частично уплощенной поверхности 80. Процессор 46 выполнен с возможностью визуализации (блок 120) на дисплее 61 изображения частично уплощенной поверхности 80, причем частично уплощенная поверхность 80 ориентирована в соответствии с новой ориентацией.
Обратимся теперь к Фиг. 10, которая представляет собой блок-схему 130, содержащую примеры этапов во втором способе работы устройства 12, показанного на Фиг. 1. Также обратимся к Фиг. 6-8.
Процессор 46 (Фиг. 1) выполнен с возможностью приема (блок 132) пользовательского ввода, указывающего крайние точки 90, 92 для вычисления траектории по частично уплощенной поверхности 80 внутренней поверхности 72 полости. Процессор 46 выполнен с возможностью вычисления (блок 134) траектории 94 между принятыми крайними точками 90, 92 в соответствии по меньшей мере с некоторыми из вычисленных значений подъема. В некоторых вариантах осуществления траектория 94 вычисляется между крайними точками 90, 92 на основании поддержания траектории 94 в том же диапазоне значений подъема, который может включать в себя, например, одно или более из следующего: не пересекающий одну из контурных линий 86, не пересекающий две из контурных линий 86 и т.д., и/или не превышающий заданное положительное и/или отрицательное значение подъема во время вычисления траектории в целом или, даже, на участке вычисленной траектории 94. Процессор 46 выполнен с возможностью визуализации (блок 136) траектории 94 на частично уплощенной поверхности 80.
Отслеживающий модуль 58 выполнен с возможностью отслеживания (блок 138) местоположения медицинского инструмента в полости в ответ на введение медицинского инструмента в полость. Процессор 46 выполнен с возможностью визуализации (блок 140) представления 96 медицинского инструмента на частично уплощенной поверхности 80 в ответ на отслеживаемое местоположение.
Различные признаки настоящего изобретения, которые для ясности описаны в контекстах разных примеров осуществления, также могут быть обеспечены в комбинации в одном варианте осуществления. С другой стороны, различные характеристики настоящего изобретения, которые для краткости описаны в тексте единственного варианта осуществления настоящего изобретения, могут также быть представлены отдельно или в любой приемлемой подкомбинации.
Описанные выше варианты осуществления приведены лишь в качестве примера, и настоящее изобретение не ограничено вариантами, показанными и подробно описанными выше в настоящем документе. Напротив, объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных элементов, описанных выше в настоящем документе, а также их варианты и модификации, которые могут быть доступны специалистам в данной области после прочтения приведенного выше описания и которые не были описаны на предшествующем уровне техники.
Реферат
Изобретение относится к области вычислительной техники, в частности к картированию полости тела. Технический результат заключается в обеспечении возможности визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости. Технический результат достигается за счет проецирования пары угловых координат соответствующих местоположений с внутренней поверхности на соответствующие местоположения в двухмерной (2D) плоскости в соответствии с заданным преобразованием системы координат; вычисления соответствующих значений подъема от 2D плоскости в соответствующих местоположениях на основании по меньшей мере радиального расстояния, связанного с соответствующей проецируемой парой угловых координат; и визуализации на дисплее изображения частично уплощенной поверхности внутренней поверхности полости, причем частично уплощенная поверхность приподнята от 2D плоскости в соответствии с вычисленными соответствующими значениями подъема в соответствующих местоположениях. 3 н. и 14 з.п. ф-лы, 10 ил.
Комментарии