Исправление погрешностей, вызванных тропосферой, в глобальных системах определения местоположения - RU2348052C2
Код документа: RU2348052C2
Чертежи


Описание
Настоящее изобретение относится к разработкам, направленным на повышение точности, достижимой посредством глобальных навигационных спутниковых систем, ГНСС (GNSS).
В настоящее время существует две общедоступные системы глобальной системы определения местоположения (GPS), известные как "Навстар" (NAVSTAR), собственником которой являются США, и ГЛОНАСС (GLONASS), собственником которой является Российская Федерация. Они уже существуют, приблизительно, в течение двух десятилетий, но имеются надежды, что в ближайшем будущем предоставлять свои услуги начнет еще одно европейское региональное отделение глобальной системы определения местоположения (GPS) с последующим запуском в течение нескольких лет европейской системы, имеющей название "Галилео" (GALILEO).
Происходило постепенное усовершенствование существующих систем, в результате чего, при использовании варианта реализации на основе дифференциальной фазы, потенциально может быть достигнута точность определения местоположения менее 2 см на базе 1000 км, но за счет большого объема вычислений и времени, затрачиваемого на определение местоположения. Измерения в реальном масштабе времени или в масштабе времени, близком к реальному, имеют соответственно более низкое разрешение, и в настоящее время требования к обеспечению высокой точности означают, что необходимо использование еще и добавочных средств для дополнения информации, предоставляемой ГНСС. Кроме того, одним их этих средств может являться, в том числе, приемник, выполняющий измерения на основании данных от многих спутников, вплоть до всех спутников, находящихся в пределах его видимости, посредством чего вычисляют переопределенное решение относительно местоположения и не учитывают противоречивые данные для повышения точности решения относительно местоположения. В такой системе могут быть использованы данные более чем из одной группы спутников ГНСС, глобальной системы определения местоположения (GPS) и ГЛОНАСС (GLONASS).
Несмотря на то, что ГНСС используют, в основном, для установления местоположения пользователя, имеющего надлежащий, обычно подвижный, приемник, ее также используют для предоставления точных сигналов времени пользователям, местоположения которых или уже известны, или их не нужно знать. Комплекты аппаратуры для определения местоположения одиночного пользователя содержат простые приемники спутниковых передач и электронные схемы, производящие моделирование, по меньшей мере, некоторых атмосферных эффектов, влияющих на прием сигнала, для того, чтобы попробовать частично устранить погрешности в вычисленном местоположении.
Однако в любом случае: заинтересован ли пользователь в получении сведений о местоположении или в измерении времени, возникают существенные погрешности из-за неспособности точного моделирования задержки сигналов ГНСС, вызванной атмосферой, а именно ионосферой и тропосферой.
Пользователи спутниковых навигационных систем осуществляют генерацию решения относительно их трехмерного местоположения и времени путем обработки четырех (4) или более результатов измерения псевдодальности до четырех или более спутников. Результат измерения псевдодальности представляет собой разность между временем на часах спутника в момент широковещательной передачи радиосигнала и временем на часах приемника пользователя в момент приема. Следовательно, результаты наблюдения за псевдодальностью связаны с временем прохождения радиосигнала и, следовательно, с расстоянием между спутником и пользователем. Поскольку расчетные данные о местоположении спутников являются известными (их передает спутник), то пользователь может вычислить решение для четырех неизвестных (которыми являются трехмерное местоположение и время) с использованием четырех или более результатов наблюдения за псевдодальностью. В качестве части пользовательского фильтра для вычисления навигационных данных/времени производят корректировку результатов наблюдения за псевдодальностью с учетом изменений времени прохождения радиосигнала относительно времени его прохождения в свободном пространстве.
В пользовательском фильтре для вычисления навигационных данных/времени вводят несколько поправок, применяемых к исходным результатам измерения псевдодальности, в том числе, поправки на влияние тропосферы, поправки на влияние ионосферы и релятивистские поправки.
В публикации международной заявки WO-A1-03/069366 был предложен способ обеспечения учета задержек сигналов в ионосфере, и за счет использования так называемого серверного узла связи, который принимает сигналы со спутников ГНСС, вычисляет поправочные коэффициенты, которые могут быть применены в расположенных поблизости от него приемниках глобальной системы определения местоположения (GPS) перед их локальной передачей по радио для того, чтобы такой приемник глобальной системы определения местоположения (GPS) осуществлял их прием и использовал их для видоизменения встроенной модели, используемой для коррекции таких задержек. Для задержек сигналов в ионосфере, которые содержат малую степень рефракции пути прохождения сигнала и более существенное изменение скорости прохождения сигнала, задержки и поправки для них являются, по существу, постоянными в течение некоторого промежутка времени, вследствие чего обновление поправочных данных необходимо производить не чаще, чем несколько раз в день.
С другой стороны, тропосферные эффекты, возникающие главным образом, в результате погодных или метеорологических явлений, а не климатических явлений, являются относительно быстроизменяющимися (или кратковременными) и географически локализованными. Однако по воздействию, которое тропосфера оказывает на проходящие через нее сигналы, она является одним из наиболее сильных выявленных источников погрешностей. Тропосфера вносит искривление луча и, следовательно, увеличивает путь прохождения сигнала, что создает задержку сигнала, на которую влияют несколько метеорологических факторов, но, в особенности, содержание влаги. Задержки сигналов в тропосфере трудно поддаются моделированию простыми средствами.
Обработку задержек сигналов в тропосфере традиционно осуществляли с использованием глобальных моделей задержки сигналов в тропосфере, которые работают на основании так называемых параметров климата, которые являются относительно инвариантными и могут быть запомнены в приемнике пользователя, но эти параметры, в лучшем случае, создают усредненный или сезонный ожидаемый результат, но не результат, основанный на метеорологических данных, то есть основанный на текущих, недавних или спрогнозированных метеорологических условиях.
Одной из таких моделей, которую используют и которая может быть встроена в портативный приемник глобальной системы определения местоположения (GPS), является модель зенитной задержки сигналов в тропосфере, предложенная Радиотехнической комиссией по аэронавтике США (RTCA) для пользователей системы расширенного района приема дифференциальных поправок (WAAS), которая описана в документе "Minimum Operational Performance Standards for Global Positioning Systems/Wide Area Augmentation System Airborne Equipment" RTCA DO229C, ноябрь 2001 г.
Такая модель является полезной, поскольку она приводит задержки сигналов в тропосфере к более простым зенитным значениям (обозначенным здесь как DZ или ZTD), но по-прежнему требуется их преобразование с учетом эффектов, обусловленных высотой над горизонтом, которые вызваны малыми углами наклона орбиты спутника относительно пользователя. Одна из таких моделей преобразования отображения описана Ниеллом (Niell) в статье "Global mapping functions for the atmosphere delay at radio wavelengths", Journal of Geophysical Research Vol. 101, No B2, Pages 3227-3246, февраль 1996 г.
Однако, несмотря на то, что эти модели позволяют встраивать их в приемник пользователя, они, по существу, имеют ограниченную способность обеспечивать учет изменений тропосферных условий, которые оказывают воздействие на задержки сигнала, вызванные постоянно изменяющимися и локализованными погодными условиями.
Несмотря на то, что существуют модели для получения точных данных о тропосфере путем учета метеорологических условий в одном или в большем количестве регионов, например, путем численного прогнозирования погоды, ЧПП (NWP), локализованный характер и, следовательно, генерация большого объема данных воспринимались в качестве подтверждения того, что в настоящее время эти модели не могут быть использованы для заметного усовершенствования реальных устройств; то есть это обусловлено двумя факторами: слишком большим объемом этих данных для передачи через системы связи, доступные для мобильных пользователей, и ограниченной пропускной способностью для обработки в пределах приемлемого количества времени.
В документе D1 (US2002/0199196 (M.Rabinowitz, J.J.Spiker) 26.12.2002) описана система, предназначенная для определения местоположения терминала пользователя, в этом документе признают, что в некоторых местах, в особенности, в городских зонах, имеет место плохой прием сигналов со спутников по сравнению с приемом транслируемых наземных телевизионных сигналов, и в нем предложена система определения местоположения, содержащая приемник глобальной системы определения местоположения (GPS) или аналогичный приемник, в котором используют прием сигналов из группы близлежащих телевещательных передатчиков, расположенных в фиксированных местах, вместо или в дополнение к приему сигналов с находящихся на орбите спутников, в тех случаях, когда условия распространения сигнала благоприятствуют использованию первого варианта приема. Поскольку, по существу, известны такие терминалы, которые из сигналов, принятых из пространственно разделенных источников, определяют сигналы псевдодальности до источников, из которых они вычисляют местоположение, в документе D1 описано два новых их вида: первый вид, в котором местоположение терминала пользователя определяют в сервере, расположенном на удалении от пользователя, а данные о местоположении терминала пользователя передают в терминал пользователя, и второй вид, в котором местоположение терминала пользователя определяют в терминале пользователя с использованием данных, содержащихся в сигналах, принятых из спутников, находящихся на орбите, или в наземных телевизионных сигналах, а данные передают из сервера, расположенного в удаленном пункте.
Первый способ содержит операцию передачи значений псевдодальности, вычисленных в терминале пользователя из принятых сигналов, в сервер, расположенный в удаленном пункте, а сервер определения местоположения решает систему уравнений, в которой использованы значения псевдодальности, для определения местоположения терминала пользователя. Для обеспечения этого в документе D1 также раскрыто, что сервер определения местоположения получает метеорологическую информацию, относящуюся к местоположению (окрестностям) терминала пользователя, и из этой информации сервер определения местоположения определяет скорость распространения сигнала в тропосфере, подходящую для сигналов со спутников, принятых в терминале пользователя, до их отправки в сервер определения местоположения, и вносит поправки в значения псевдодальности для вычисления местоположение терминала пользователя для достижения более высокой точности определения местоположения.
Второй способ содержит операцию передачи данных в терминал пользователя из сервера определения местоположения для того, чтобы терминал пользователя мог определять свое собственное местоположение, причем одними из передаваемых данных является скорость распространения сигнала в тропосфере, вычисленная, в частности, из метеорологической информации, доступ к которой осуществляет сервер определения местоположения, для того, чтобы терминал пользователя мог лучше определить свое местоположение. В документе D1 не раскрыто то, каким образом терминал пользователя отличается по своему виду в том случае, когда он получает эти дополнительные данные, или то, каким образом используют эти данные.
Такие передачи данных между сервером определения местоположения и терминалом пользователя представляют собой локальные передачи через сеть телефонной связи. В каждом варианте имеется значительный объем данных для передачи, содержащий либо множество сигналов псевдодальности, либо результаты вычислений скорости распространения для любого из возможных местоположений терминала пользователя.
В настоящем изобретении предложен способ получения данных о задержке сигналов в тропосфере для использования в спутниковой системе определения местоположения или в ГНСС, заключающийся в том, что для местоположения пользователя осуществляют генерацию в месте, расположенном на удалении от местоположения пользователя, и из метеорологической информации, по меньшей мере, одного точного значения задержки сигналов в тропосфере, соответствующего местоположения пользователя, для передачи упомянутому пользователю в качестве поправки для задержки сигналов в тропосфере.
В предпочтительном варианте упомянутые точные значения задержки сигналов в тропосфере получают способом трассировки лучей. Точные значения задержки сигналов в тропосфере могут быть получены путем генерации трехмерного поля показателя преломления. Кроме того, также является предпочтительным, чтобы упомянутая метеорологическая информация была основана на данных численного прогнозирования погоды, ЧПП (NWP).
В одном из вариантов реализации настоящего изобретения, применимом для пользователя, местоположение которого не является точно известным, способ может содержать следующие операции, на которых из первой модели, которая, по существу, является известной, осуществляют генерацию первого набора приближенных значений задержки сигналов в тропосфере, соответствующих различным географическим местоположениям пользователя, из метеорологической модели, в которой использована метеорологическая информация, осуществляют генерацию второго набора значений задержки сигналов в тропосфере, которые являются точными и соответствующими упомянутым различным географическим местоположениям пользователя, создают набор изменений значения задержки для его использования в упомянутой первой модели для того, чтобы первая модель могла обеспечить получение набора значений задержки сигналов в тропосфере, по существу, согласованного со вторым набором, и выражают набор изменений в виде набора поправок для задержки сигналов в тропосфере для передачи упомянутому пользователю.
Первая модель основана на неметеорологических параметрах, причем эти параметры содержат, по меньшей мере, один из следующих параметров: время года, широту и высоту над уровнем моря. Неметеорологические параметры могут дополнительно содержать, по меньшей мере, один из следующих параметров: долготу и время суток.
Метеорологическая модель или каждая полученная из нее упомянутая поправка для значения задержки сигналов в тропосфере могут быть дополнены метеорологическими данными, полученными путем непосредственных наблюдений.
В способе из этого варианта осуществления изобретения первая модель и метеорологическая модель создают наборы значений задержки сигналов в тропосфере, содержащие зенитные задержки сигналов в тропосфере. Первая модель может содержать отображающую функцию, связывающую задержку сигналов в тропосфере при заданном угле возвышения c зенитной задержкой сигналов в тропосфере, а упомянутый набор изменений значения задержки может содержать набор изменений для использования в отображающей функции первой модели.
В предпочтительном варианте изменения значений задержки представляют собой разности между соответствующими значениями наборов, относящихся к первой модели и к метеорологической модели. Передаваемыми поправками могут являться непосредственно сами изменения или, в предпочтительном варианте, изменения, выраженные в виде относительного изменения значений из первого набора, например, в виде процентного отношения.
Таким образом, поправка может быть реализована в виде множителя или добавки к любому значению, генерация которого осуществлена посредством первой модели.
Получают точные значения задержки сигналов в тропосфере способом трассировки лучей для определения пути прохождения сигналов со спутников через тропосферу к пользователю и, следовательно, производят оценку задержки относительно прямого пути прохождения и, возможно, с использованием генерации трехмерного поля показателя преломления.
В этой первой модели могут быть введены сопоставимые поправки в отображающие функции, которые также основаны на путях прохождения, на которые оказывает воздействие задержка сигналов в тропосфере.
Метеорологическая модель может быть основана на данных численного прогнозирования погоды (ЧПП) для региона земного шара или на метеорологических данных, получаемых в реальном масштабе времени, или обоих из них. В частности, метеорологическая модель или каждая упомянутая поправка для значения задержки сигналов в тропосфере могут быть дополнены метеорологическими данными, полученными из непосредственных наблюдений, которые, например, являются доступными в двумерном виде с некоторых спутников, передающих изображения земной поверхности.
Регион, для которого получены значения данных, может быть, по существу, глобальным или может представлять собой меньший регион, определенный в схемах ЧПП в виде мезомасштабных карт.
В обоих случаях возможно осуществить генерацию набора (зенитных) значений задержки сигналов в тропосфере для каждого местоположения из сетки мест расположения по региону в виде двухмерного массива, определяющего географические точки, в каждой из которых имеется значение задержки. Таким образом, из метеорологической модели и неметеорологической модели можно создать изменения зенитных значений задержки сигналов в тропосфере и набор поправок в виде массива данных, значения которого определены для отдельных узловых точек сетки на поверхности Земли, а набор значений содержит распределение упомянутых изменений, по меньшей мере, по части поверхности Земли.
Что касается характера значений задержки и поправок, то к набору поправок может быть применена операция сжатия данных, в результате чего получают сжатый набор данных для передачи пользователю.
Поскольку набор поправок, в сущности, создает файл данных, аналогичный файлу данных полутонового изображения, то в предпочтительном варианте сжатие объема данных набора поправок осуществляют удобным, но не являющимся существенно необходимым способом сжатия изображений путем сжатия данных с потерями, например, согласно стандарту JPEG2000 сжатия неподвижных изображений на основе "коротковолнового" (wavelet) сжатия и стандарту JPEG сжатия неподвижных изображений на основе косинусного преобразования.
За счет реализации надлежащего уровня сжатия данных становится возможным осуществить передачу данных набора поправок пользователю по каналу связи или по каналу передачи данных с ограниченной пропускной способностью.
Таким образом, после создания набора поправок, пригодного для использования удаленным пользователем, имеющим приемник сигнала со спутника, согласно этому варианту осуществления настоящего изобретения, по меньшей мере, часть набора поправок может быть передана через, по меньшей мере, один спутник, находящийся на орбите, путем передачи набора поправок в виде сжатого файла данных изображения в упомянутый спутник и ретрансляции, по меньшей мере, части набора пользователю из упомянутого спутника, находящегося на орбите.
В предпочтительном варианте это осуществляют путем передачи поправок, по меньшей мере, в один находящийся на орбите спутник ГНСС, из которого пользователь получает сигналы для установления, по меньшей мере, одного из параметров, которыми являются местоположение и время. Для еще большего сжатия объема данных, предназначенных для передачи или ретрансляции, в способе предусмотрена операция передачи данных изображения в упомянутый спутник для ретрансляции только той части поправочных данных, которые могут быть полезны пользователю в регионе, который находится в пределах зоны действия упомянутого спутника. Это может быть достигнуто путем передачи только упомянутой части поправочных данных на спутник или путем передачи всех данных, но обеспечения ретрансляции спутником только упомянутой части.
Поскольку такой спутник имеет ограниченную пропускную способность для передачи сигналов в дополнение к уже переданным сигналам и, в общем случае, способен осуществлять только лишь периодическую передачу любых данных, содержащих поправочные данные, следует иметь в виду, что метеорологическая среда изменяется непрерывно, поскольку погодные условия изменяют свое местоположение относительно отображенного на карте региона. Таким образом, в дополнение к получению значений задержки сигналов в тропосфере, соответствующих узловым точкам сетки отображенного на карте региона, необходимо применять сжатие данных, которое является достаточным для обеспечения возможности передачи всех или части упомянутых поправок, пригодных для применения пользователем в пределах промежутка времени, определяемого наличием возможности передачи и скоростью передачи данных со спутника, который является существенно более коротким, чем срок достоверности метеорологической информации, используемой в метеорологической модели.
Для обеспечения достоверности данных, полученных из тропосферы, предпочтительным вариантом является передача упомянутых поправок для значения задержки пользователю в соответствии с метеорологическим временным разрешением упомянутой информации из метеорологической модели, которое не превышает 1 часа, и/или в соответствии с метеорологическим пространственным разрешением упомянутой информации из метеорологической модели, которое не превышает 90 км, поскольку время и расстояние связаны скоростью перемещения соответствующих погодных условий.
Посредством вышеупомянутого способа сжатия изображения можно осуществлять передачу поправочных данных пользователю со скоростью передачи данных в диапазоне от 25 бит в секунду (бит/с) до 500 бит/с и путем выборочной передачи только лишь частей глобального изображения, применимых для пользователя в относительно малом его регионе, обеспечивать возможность эффективной передачи поправочных данных со скоростями передачи значительно меньшими, чем максимальное значение этого диапазона.
Поскольку в метеорологической модели значения задержки сигналов в тропосфере получают из данных, используемых в ином месте для предсказания или прогнозирования метеорологических условий в одном или в большем количестве мест, то есть условий, изменяющихся во времени, то существует возможность прогнозирования, на основании упомянутой метеорологической информации, будущих значений задержки сигналов в тропосфере и создания спрогнозированного набора упомянутых поправок для географического региона поверхности Земли, при этом каждый элемент упомянутого спрогнозированного набора описывает поправку, которая становится текущей, как функцию времени, прошедшего с момента создания. Следовательно, возможно осуществить передачу упомянутого спрогнозированного набора поправок в виде пакета и использовать элементы набора по мере того, как момент времени, для которого был спрогнозирован каждый из них, становится текущим моментом времени в отношении прогноза.
Такая передача может быть выполнена в спутник, находящийся на орбите, а ретрансляция элементов набора может быть осуществлена по одному по мере того, как момент времени, для которого был спрогнозирован каждый из них, становится текущим моментом времени в отношении прогноза.
Второй вариант реализации способа применим в том случае, когда известно местоположение приемника пользователя относительно сервера и/или спутников ГНСС. Эта информация может быть использована сервером вместе с метеорологической информацией для получения реальных или преобразованных значений задержки сигналов в тропосфере (а не зенитных значений задержки) для их передачи пользователю с целью настройки или ввода поправок при определении псевдодальности приемника пользователя и получения точных значений привязки по времени. Такая передача информации может быть осуществлена способом прямой связи или через сеть. Она также может быть произведена через один или через большее количество спутников, например, через спутники ГНСС, как описано выше, хотя в этом случае может потребоваться сжатие данных. Поскольку местоположение пользователей известно, то предполагают, что отсутствует необходимость в получении и передаче набора поправок для значения задержки, отображающих распределение по региону. Однако, как описано выше, целесообразным вариантом может являться следующий: прогнозируют метеорологические условия для любого местоположения пользователя, в котором может оказаться пользователь, получают спрогнозированный набор поправок для задержки и осуществляют их передачу в виде пакета для поочередного использования приемником пользователя по мере того, как момент времени, для которого был спрогнозирован каждый из элементов, становится текущим моментом времени.
Согласно второму объекту настоящего изобретения, в нем предложено устройство для получения данных, используемых пользователем спутниковой системы определения местоположения или ГНСС, содержащее средство генерации, предназначенное для генерации, в местоположении сервера, удаленном от пользователя, из метеорологической информации, по меньшей мере, одного точного значения задержки сигналов в тропосфере, соответствующего местоположению пользователя, и средство передачи, по меньшей мере, функции упомянутого значения пользователю в качестве поправочного значения задержки сигналов в тропосфере.
Сервер может быть выполнен таким образом, что получает набор значений задержки сигналов в тропосфере, соответствующих множеству местоположений пользователя.
В первом варианте осуществления настоящего изобретения устройство, описанное в предыдущем абзаце, содержит первое средство генерации, предназначенное для генерации первого набора приближенных значений задержки сигналов в тропосфере из первой модели, которая является, по существу, известной, второе средство генерации, предназначенное для генерации второго набора более точных значений задержки сигналов в тропосфере из упомянутой метеорологической модели, основанной на метеорологической информации, и средство обработки, предназначенное для создания из упомянутых первого и второго наборов значений задержки набора изменений значения задержки сигналов в тропосфере для использования в упомянутой первой модели для того, чтобы она могла обеспечить получение набора значений задержки сигналов в тропосфере, по существу, согласованного со вторым набором, а упомянутое средство обработки выполнено таким образом, что выражает изменения в виде набора поправок для задержки сигналов в тропосфере.
В предпочтительном варианте упомянутое первое средство генерации использует упомянутую первую модель, которая основана на неметеорологических параметрах. Кроме того, средство обработки может быть выполнено таким образом, что выражает каждый из упомянутых наборов поправок в виде разности между соответствующими значениями из первого и второго наборов, возможно, в виде относительного изменения значений, для которых вводят поправки.
Средство обработки выполнено таким образом, что выражает поправки в виде распределения по региону поверхности Земли, в предпочтительном варианте - в виде файла данных полутонового изображения, состоящего из многобитовых слов, причем каждое слово отображает местоположение региона. Кроме того, устройство может содержать средство сжатия упомянутого набора поправок. Оно может производить сжатие набора без потери данных или для обеспечения большей степени сжатия - сжатие набора с потерей данных.
В преимущественном варианте каждое из средств генерации, которыми являются первое средство генерации и второе средство генерации, может получать поправки для параметров, по меньшей мере, функции отображения угла возвышения, используемой для преобразования зенитных значений задержки в реальные значения задержки. Поправки могут быть наложены на набор поправочных данных для зенитной задержки в виде более длинных слов для их передачи в приемник.
Устройство также содержит средство передачи, предназначенное для передачи упомянутого набора поправок пользователю и в предпочтительном варианте осуществляющее передачу через спутник, находящийся на орбите, которым может являться спутник ГНСС.
Во втором варианте осуществления изобретения, который применим в том случае, когда местоположение приемника пользователя сигналов со спутников является известным, устройство выполнено таким образом, что принимает от пользователя информацию, определяющую, по меньшей мере, одно из следующих местоположений: местоположение пользователя относительно сервера или местоположение пользователя относительно спутников ГНСС, и предоставляет поправки в виде непосредственно самих значений задержки сигналов в тропосфере, а не зенитных значений задержки, хотя могут быть предоставлены и последние из упомянутых значений.
Согласно третьему объекту настоящего изобретения приемник пользователя ГНСС содержит средство, функционирующее таким образом, что оно осуществляет генерацию, из встроенной модели, на основании неметеорологических данных, набора приближенных значений задержки сигналов в тропосфере, применимых для опознавательных сигналов, принятых из множества упомянутых спутников, и из упомянутых значений задержки и опознавательных сигналов, принятых из множества упомянутых спутников, вычисляет приближенное местоположение приемника относительно поверхности Земли или время, средство, функционирующее таким образом, что осуществляет прием набора поправок для упомянутых значений задержки сигналов в тропосфере, получаемых из модели, при этом упомянутые поправки получены из метеорологических данных, средство реализации изменений упомянутых полученных значений задержки в соответствии с поправками и средство вычисления местоположения или времени с более высокой точностью.
Упомянутое средство реализации изменений упомянутых значений задержки может функционировать таким образом, что производит интерполяцию или экстраполяцию упомянутых поправок в соответствии с вычисленным местоположением пользователя относительно местоположений, для которых были получены поправки.
Согласно четвертому объекту настоящего изобретения система ГНСС, в состав которой входит множество спутников, находящихся на орбите, содержит описанное выше устройство для получения данных и приемник пользователя.
В приведенном выше описании значения задержки сигналов в тропосфере и зенитные значения задержки сигналов в тропосфере были упомянуты без учета их свойств. Несмотря на то, что возможно получить одно значение задержки сигналов в тропосфере для конкретного местоположения, более общепринятым вариантом является получение так называемой "влажной" задержки и "сухой" или "гидростатической" задержки. За исключением тех случаев, когда важно провести различия между ними, в частности в отношении сжатия данных, подразумевают, что приведенные в этом описании ссылки на термины "задержка или задержки сигналов в тропосфере" и их производные следует истолковывать как получение значений для каждой из них.
Дополнительные подробности и преимущества настоящего изобретения станут очевидными из приведенного ниже описания со ссылкой на перечисленные ниже чертежи, на которых изображено следующее:
на Фиг.1 изображена схема системы определения местоположения, ГНСС, из известного уровня техники, на которой показано приемное устройство для определения местоположения пользователя и множество находящихся на орбите спутников системы определения местоположения,
на Фиг.2 изображена схема первого варианта осуществления системы определения местоположения ГНСС, в которой реализовано настоящее изобретение, на схеме показано приемное устройство для определения местоположения пользователя, наземная станция и множество находящихся на орбите спутников системы определения местоположения,
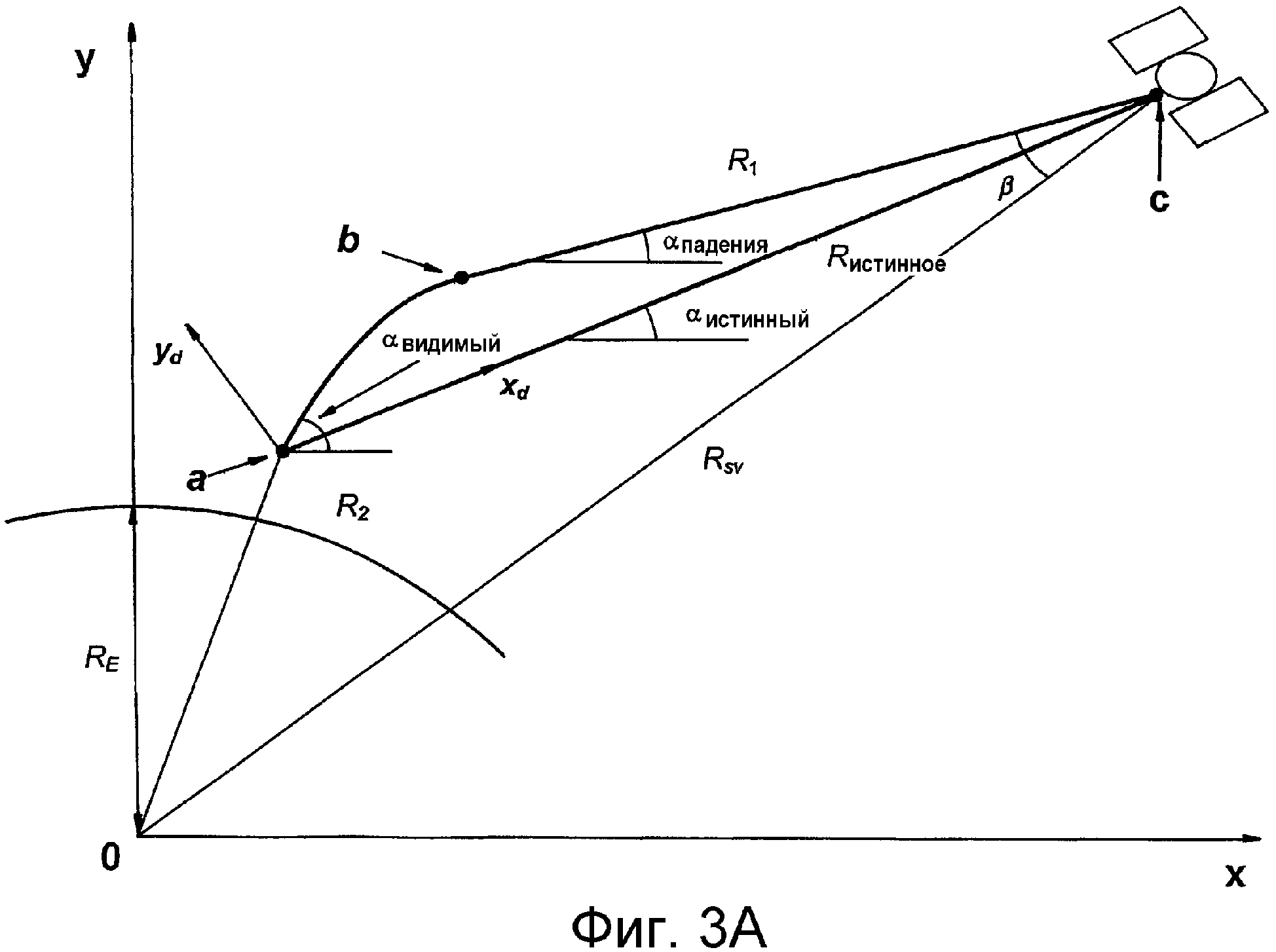
на Фиг.3А приведена графическая иллюстрация трассировки лучей,
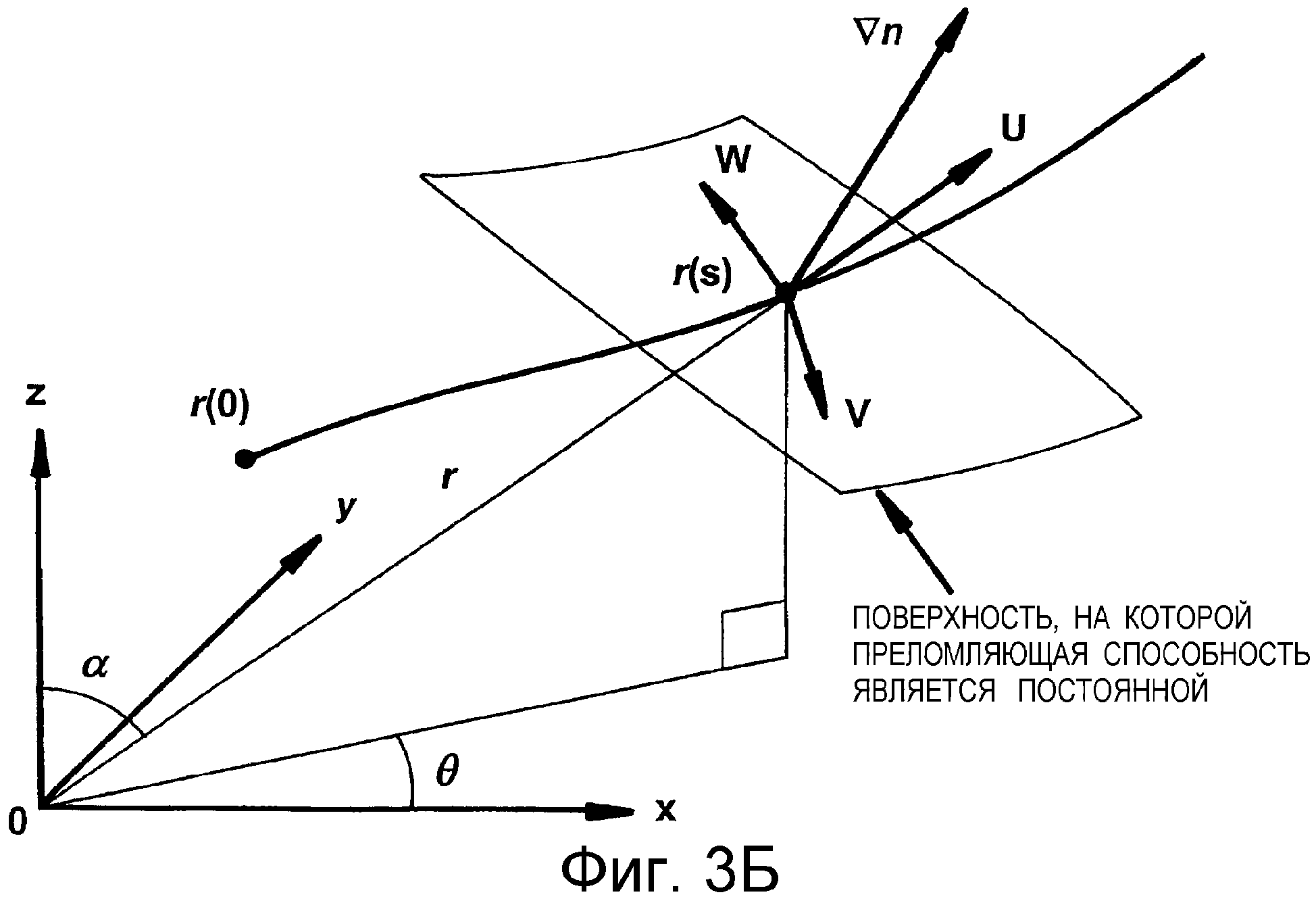
на Фиг.3B приведена графическая иллюстрация отображения поля рефракции при трассировке лучей,
на Фиг.4 показано графическое представление файла данных зенитной задержки, пригодного для сжатия данных способами сжатия изображений,
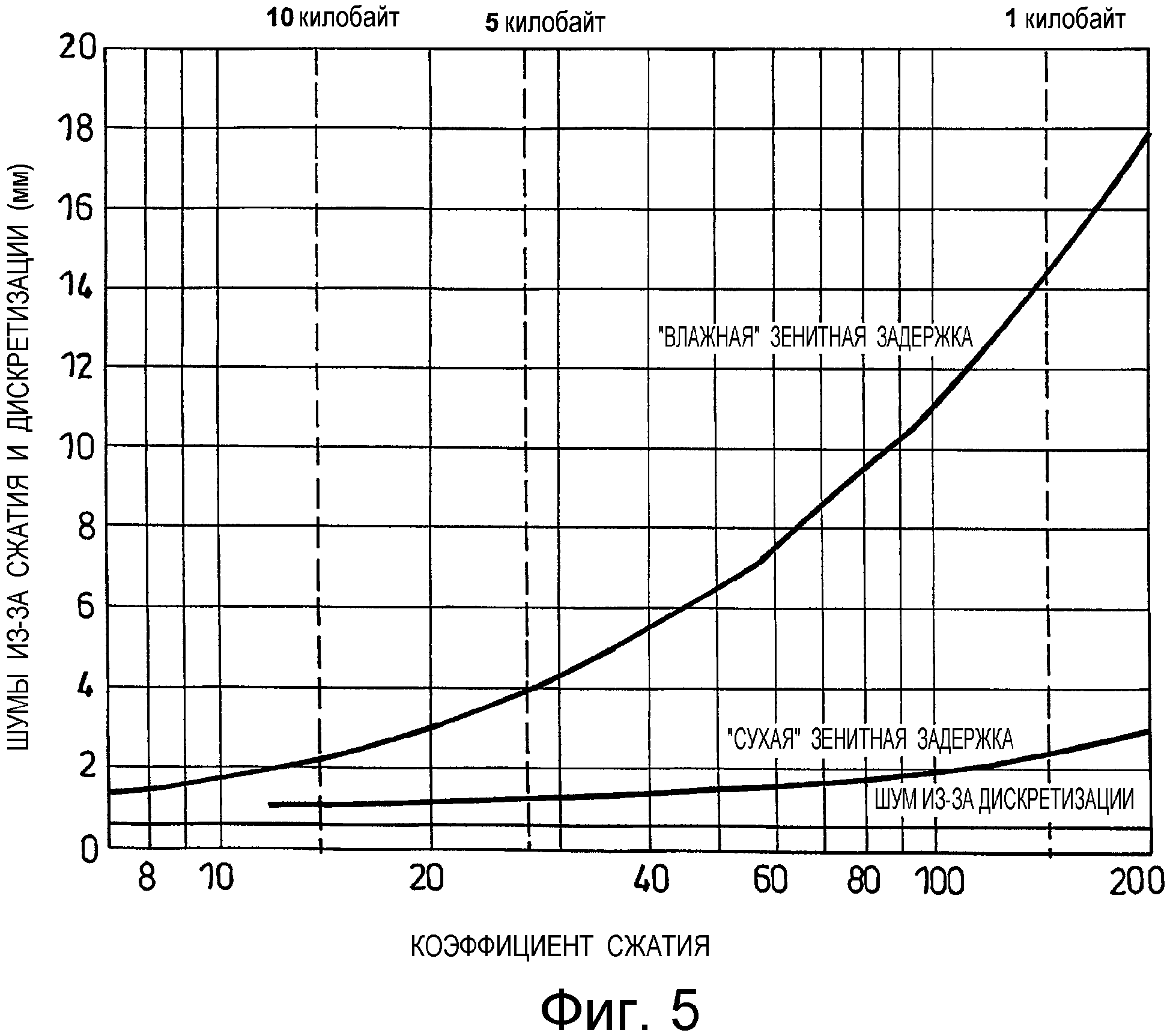
на Фиг.5 показано графическое представление того, каким образом шум оказывает воздействие на сжатие, и
на Фиг.6 изображена схема, подобная схеме Фиг.2, на которой показан второй вариант осуществления настоящего изобретения для терминала пользователя, расположенного в известном месте.
Со ссылкой на чертеж Фиг.1, на нем в схематичном виде показан участок 50 поверхности Земли и связанная с ним глобальная система 100 определения местоположения, содержащая множество спутников ГНСС 1101, 1102, 1103,..., находящихся на околоземной орбите, и пользователь 120, показанный в виде приемника сигнала и процессора портативного типа или установленного на транспортном средстве на поверхности Земли или над ней.
Приемник 120 пользователя содержит, как и в обычном варианте, входной приемник 122 сигналов, переданных из различных спутников, находящихся в пределах видимости на частотах радиочастотного диапазона, средство 124 обработки и устройство отображения информации или подобное устройство 126 вывода информации. Средство обработки содержит цифровой процессор, который отвечает на сигналы, принятые из различных спутников и являющиеся характерными для этих различных спутников, положения на орбите которых относительно точек на Земле являются известными, и по изменениям при приеме этих сигналов вычисляет решение, содержащее данные о местоположении приемника пользователя в двух или в трех измерениях и, что является важным в некоторых областях применения, - время.
Приемник пользователя посредством вышеупомянутых измерений псевдодальности может определять по множеству сигналов, принятых со спутников, приближенное местоположение, но которое является неточным из-за задержек сигналов, возникающих вследствие рефракции в тропосфере, вызванной рефракцией, главным образом, водного содержимого метеорологических систем, например погодных фронтов. Такая рефракция в тропосфере может быть скомпенсирована, по меньшей мере, в первом приближении путем применения при обработке принятых сигналов первой модели 130, которая отображает климатические условия, ожидаемые для этого приближенного местоположения в данное время года. Эта так называемая модель климата является, по существу, неметеорологической, поскольку ее обновление производят редко, и она отображает, в лучшем случае, представление усредненных условий. Известным образом, модель 130 климата содержит параметры, по меньшей мере, для одного времени года, а в предпочтительном варианте - для всех времен года, широту и высоту над уровнем моря, соответствующие местоположению пользователя, и может содержать следующие параметры: долготу и/или время суток, но это не является обязательным условием.
Эта первая модель, именуемая моделью климата, выполнена таким образом, что обеспечивает генерацию зенитных задержек сигналов в тропосфере (ZD), которые могут быть применены для местоположения пользователя, которое может быть преобразовано с учетом наклона угла возвышения спутника относительно приемника для предоставления более точного значения задержки сигналов в тропосфере и для введения поправок для псевдодальности, связанных с направлением, по которому фактически проходит траектория прохождения сигнала, в особенности, в том случае, если спутник имеет малый угол возвышения.
Для этого первая модель может содержать функцию 130' отображения угла возвышения, в которой используют, например, трехчленную аппроксимацию непрерывной дроби, по существу, так же, как изложено в упомянутой выше статье Ниелла (Niell). Однако также следует понимать, что используемые в модели отображения параметры, полученные из упомянутых выше параметров, которыми являются время года, широта и высота над уровнем моря, также подвержены погрешностям, вызванным метеорологическими возмущениями, хотя для многих задач эти погрешности можно считать слишком малыми для их исправления.
В этом устройстве из предшествующего уровня техники используют зенитную задержку сигналов в тропосфере, а наличие надлежащей отображающей функции для введения приближенных поправочных значений задержки сигналов в тропосфере позволяет вычислять в приемнике более точное решение для местоположения и времени.
Несмотря на присущие ей неточности, эта первая модель является полезной, поскольку она позволяет изготавливать и использовать приемник пользователя с этим (хотя и ограниченным) средством введения поправок, которое является встроенным и не зависящим от приема сигналов из какого-либо иного места.
До настоящего времени точность определения местоположения, обеспечиваемая приемником пользователя, была ограничена несколькими факторами, но по мере их устранения и сокращения источников погрешностей, очевидно, что теперь важной причиной ограничения точности являются остаточные погрешности задержки сигналов в тропосфере, которые остаются после использования первой модели.
Теперь со ссылкой на Фиг.2, согласно настоящему изобретению имеется наземная станция 200, расположенная в определенном месте на Земле, которую для удобства здесь именуют сервером, хотя количество таких станций, связанных с различными регионами на поверхности Земли, может быть большим, чем одна. Этот сервер не содержит средства приема сигналов со спутников, но соединен таким образом, что получает из одной или из большего количества метеорологических организаций информацию, отображающую результаты численного прогнозирования погоды (ЧПП) или пригодную для численного прогнозирования погоды (ЧПП) для местоположений в различных местах вокруг земли; метеорологическая информация может быть глобальной по своей сущности или может быть ограниченна одним или большим количеством субглобальных регионов.
В сервере имеется копия первой модели (130), используемой в приемнике пользователя, которая содержит вышеупомянутые неметеорологические параметры моделирования климата и которая обозначена номером позиции 230.
В сервере также имеется вторая, или метеорологическая, модель, обозначенная как единое целое номером позиции 250. Эта модель реагирует на метеорологическую информацию, предоставленную путем ЧПП, и определяет точные значения для зенитной задержки (ZD) (как "влажную" и "сухую" составляющие).
Значения зенитной задержки сигналов в тропосфере (ZD) для двух моделей сравнивают в блоке 260 для определения разности между ними, которая представляет собой погрешность, свойственную первой модели. Таким образом, разности представляют собой значения изменений, посредством которых может быть изменен или исправлен результат, полученный в первой модели, для обеспечения получения того же самого результата, что и во второй модели.
Эти поправки кодируют и подвергают операции сжатия данных в блоке 270, подробное описание которого приведено ниже, а затем передают в приемник пользователя по каналу 280 связи, который представляет собой канал связи Земля-спутник с одним или с большим количеством спутников ГНСС 1101 и т.д., посредством передатчика 275, и осуществляют их ретрансляцию со спутника или со спутников в приемник пользователя, обозначенный как единое целое номером позиции 220.
Приемник пользователя содержит устройство 228 декодирования данных о значениях поправок, которое, таким образом, предоставляет значения зенитной задержки (ZD) для введения поправок в значения зенитной задержки из первой модели (значения "влажной" и "сухой" составляющих), фактически делая их равными точным значениям, полученным посредством второй модели, имеющейся только в удаленном сервере, для использования при навигационных вычислениях и вычислениях времени.
Как также описано ниже, поправки могут содержать элементы, применимые для отображающих функций первой модели, для того, чтобы обеспечить более высокую точность как значений зенитной задержки, так и значений отображающей функции для вычисления местоположения и времени, но это не является обязательным.
Приведенное выше краткое описание системы изложено ниже более подробно с описанием дополнительных отличительных признаков, которые могут быть использованы по отдельности, но целесообразно их совместное использование, при котором происходит их взаимосвязь.
Что касается сервера 200, то метеорологическая модель основана на трехмерном массиве узловых точек сетки, для которых имеется в распоряжении метеорологическая информация, и использует эту информацию для получения поля рефракции, которое позволяет осуществлять трассировку лучей между наземной точкой вблизи от поверхности Земли и конкретным спутником, в результате чего может быть найдено значение задержки сигналов в тропосфере (для каждой из задержек: "влажной" и "сухой").
В этом месте целесообразно дать описание некоторых теоретических основ распространения сигналов, атмосферной рефракции и атмосферных эффектов, поскольку они связаны с трассировкой лучей и ЧПП.
Скорость распространения электромагнитной волны через среду может быть выражена через показатель преломления n, который по определению равен отношению скорости света в свободном пространстве к скорости в среде (Уравнение 1-1).

где n - показатель преломления,
c - скорость света в свободном пространстве,
ν - скорость распространения.
В действительности, и как показано на чертеже Фиг. 3А, траектория сигнала со спутника искривляется из-за рефракции по мере его прохождения между спутником и Землей, в основном в тропосфере и проявляется как задержка. В системе ГНСС временную задержку в тропосфере, без учета релятивистских эффектов, определяют как разность между временем прохождения сигнала ГНСС от спутника до пользователя и временем прохождения сигнала в свободном пространстве:

где s - расстояние вдоль траектории распространения.
Первый интеграл берут по искривленной траектории распространения; второй интеграл берут по геометрически прямолинейной траектории.
Дифференциальное уравнение, описывающее искривленную траекторию луча, может быть выражено в декартовых координатах в следующем виде:

где r = r(s) - вектор, описывающий траекторию луча,
s - длина искривленной траектории луча до r,
n - скалярное поле показателя преломления,
▽n - векторное поле, представляющее собой градиент n.
Дифференциальное уравнение может быть разложено следующим образом:

Решение обыкновенного дифференциального уравнения (ОДУ) первого порядка с известными начальными значениями может быть получено с использованием численных методов, например метода Рунге-Кутта или метода Адамса-Моултона (Adams-Moulton). Дифференциальные уравнения более высокого порядка могут быть решены численными методами путем перезаписи их в виде эквивалентной системы уравнений первого порядка. Используя подстановку r1 = r и r2 = r' (первая производная), дифференциальное уравнение (1-4) траектории луча может быть выражено в виде эквивалентной системы из двух дифференциальных уравнений 1-5 и 1-6 первого порядка:


Следовательно, определение траектории луча эквивалентно решению системы двух ОДУ с начальными значениями. Для решения задачи могут быть использованы стандартные численные методы, например, метод Рунге-Кутта с адаптивным пошаговым регулированием, согласующимся с заданными пользователем допусками.
Когда получено решение для траектории луча, задержка сигналов в тропосфере может быть вычислена следующим образом:

где точки a, b и c показаны на Фиг.3А. Точка b соответствует точке, в которой можно сделать предположение, что кривизна луча и рефракция являются пренебрежимо малыми, в этом описании эта точка расположена на высоте более 70 км над уровнем моря.
Процесс трассировки лучей для определения траектории от пользователя до спутника (от точки a до точки b и от нее до точки c на Фиг. 3А), начинают в точке a и предполагают, что начальный угол возвышения равен αвидимый (αApparent). Несмотря на то, что точное положение спутника и, следовательно, угол αистинный (αTrue) является известным, первоначально может быть произведен оценочный расчет только лишь угла αвидимый (из условия, что траектория луча пересекает точку c). Поскольку трассировку лучей начинают под углом, который, в лучшем случае, является предполагаемым, результирующая траектория луча, в общем случае, не будет пересекать точку c. Путем получения, по меньшей мере, двух траекторий луча и использования интерполяционных или итерационных способов можно определить угол с надлежащей точностью, из которого получают задержку сигналов в тропосфере. Настоящее изобретение основано на получении более точного используемого значения для каждой задержки сигналов в тропосфере.
Определение задержки сигналов в тропосфере, по меньшей мере, частично основано на моделировании численного прогноза погоды (ЧПП), которое обеспечивает прогноз развития физических атмосферных процессов за счет применения определяющих уравнений, в том числе сохранения массы, импульса и энергии. Производят численную обработку трехмерных полей непрерывных переменных, в том числе влажности, давления, температуры и скорости, и вторичными полученными характеристиками являются метеорологические особенности, в том числе погодные фронты. В числовую модель может быть введено множество результатов измерений, в том числе результатов приземных наблюдений, радиозондовых наблюдений и наблюдений со спутников. Осуществляют моделирование круговорота воды, в том числе таких явлений, как накопление влаги в почве, температура поверхности моря, образование облаков и выпадение осадков.
Числовые модели могут быть глобальными или моделями для ограниченной области. Модели с высокой разрешающей способностью для ограниченной области часто именуют мезомасштабными моделями, поскольку они отражают мезомасштабные метеорологические особенности, погодные условия для областей размером менее чем 100 км.
Метеорологическая служба Великобритании (UKMO) имеет и предоставляет так называемые Унифицированные Модели мезомасштабных и глобальных данных. В каждой из карт модели ЧПП задана сетка по области, охватываемой картой, и модели обеспечивают средство вычисления задержек сигналов в тропосфере в соответствующих точках. Например, Метеорологическая служба Великобритании (UKMO) имеет две модели ЧПП, так называемую глобальную модель и так называемую мезомасштабную модель. Первая из них имеет разрешающую способность по горизонтали, равную 0,8333 градуса (5/6 градуса) по долготе и 0,5555 градуса (5/9 градуса) по широте, которая дает сетку из 432×325 точек, описывающих поверхность Земли, при этом каждая точка соответствует ячейке размером приблизительно 60 км в средних широтах и приблизительно 90 км в тропиках. Эта глобальная карта может быть использована, в частности, для обеспечения граничных точек для мезомасштабной модели, которая представляет собой региональную модель с центром на Британских островах, имеет разрешение 0,11 градуса по долготе и по широте (для поддержания одинаковой разрешающей способности по горизонтали производят вращение сетки со сдвинутым полюсом) и имеет 146×182 узловых точек сетки, которые соответствуют массиву ячеек размером приблизительно 12 км×12 км. Обе модели имеют 38 уровней по вертикали и имеют протяженность приблизительно до 40 км.
В любой узловой точке сетки соответствующей карты атмосферный показатель преломления (и, следовательно, градиент показателя преломления) может быть вычислен исходя из давления, парциального давления водяного пара и температурных полей, полученных в модели численного прогнозирования погоды. Атмосферная рефракция может быть разделена на "сухую" (гидростатическую) и "влажную" составляющие. Простым двухчленным выражением, в котором точность определения преломляющей способности составляет 0,5%, является следующее:


где N - преломляющая способность,
n - показатель преломления,
P - атмосферное давление (в миллибарах),
e - давление водяного пара (в миллибарах),
T - температура (в градусах Кельвина).
Используемые поля численного прогноза погоды выражены в сферической системе координат, поэтому при вычислениях удобно осуществлять генерацию градиента преломляющей способности в сферических координатах (r, θ, α), которые могут быть преобразованы в локальные криволинейные координаты (u, v, w) с использованием следующего преобразования:

Затем применяют еще одно вращательное преобразование к локальной криволинейной системе координат для получения градиента в неподвижной декартовой системе координат (x, y, z на Фиг. 3B), удобной для численного решения уравнений 1-5 и 1-6.
Может быть выполнена линейная и логарифмически-линейная интерполяция значений поля ЧПП между узловыми точками сетки. Для продления поля ЧПП за пределы наиболее высокой узловой точки сетки и ниже рельефа ЧПП могут быть использованы способы линейной и логарифмически-линейной экстраполяции. Для точного построения поля показателя преломления необходимо учитывать изменение ускорения свободного падения в зависимости от высоты и широты. Может быть сделано предположение о наличии гидростатического равновесия. Когда определено трехмерное поле показателя преломления (n), то могут быть решены уравнения траектории луча и может быть вычислена задержка сигналов в тропосфере с использованием уравнения 1-2.
Показатель преломления атмосферы может быть разделен на "сухую" (гидростатическую) и "влажную" составляющие. "Влажная" составляющая обладает большей пространственной и временной изменчивостью. Часто удобным вариантом является разделение общих зенитных задержек на "влажные" и "сухие" зенитные задержки. Гидростатическая зенитная задержка может быть точно смоделирована с учетом результатов измерения давления на поверхности, однако "влажная" зенитная задержка не может быть точно определена из результатов измерения влажности на поверхности, поскольку они не отображают характеристики расположенной выше атмосферы.
Для лучшего понимания приведена краткая ссылка на описание представления задержек сигналов в тропосфере в виде так называемых "влажной" и "сухой" составляющих и примененного к ним отображения угла возвышения.
При моделировании задержки сигналов в тропосфере удобно, в соответствии с первой моделью, установить связь задержки сигналов в тропосфере при заданном угле возвышения ε с зенитной задержкой (


Точное моделирование гидростатической зенитной задержки может быть осуществлено с учетом результатов измерения давления на поверхности, но "влажная" зенитная задержка не может быть точно определена из результатов измерения влажности на поверхности, поскольку они не отображают характеристики расположенной выше атмосферы. Выражение для задержки сигналов в тропосфере при заданном угле возвышения может быть задано в следующем виде:

Отмечено, что необходимо проявлять осторожность при применении упрощения суперпозиции гидростатической и "влажной" атмосферных задержек: траектория распространения зависит от обоих составляющих: от гидростатической составляющей и от "влажной" составляющей.
Отображающие функции гидростатической и "влажной" составляющих согласно методологии Ниелла (Niell) обладают высокой степенью точности, не нуждаясь в априорной метеорологической информации, и может быть осуществлено эффективное моделирование изменения задержки сигналов в тропосфере в зависимости от угла возвышения путем разложения в непрерывную дробь.
Метеорологические особенности, обладающие большими пространственными и/или временными вариациями задержки сигналов в тропосфере, оказывают воздействие на точность полученных в результате ЧПП тропосферных поправок и на пропускную способность, необходимую для их регионального или глобального распространения путем передачи. Временные и пространственные вариации гидростатической составляющей преломляющей способности обычно малы, тогда как метеорологические особенности, связанные с быстрыми изменениями содержания влаги в атмосфере оказывают значительное воздействие на соотношение между точностью и пропускной способностью.
Метеорологические особенности, меньшие, чем разрешающая способность модели численного прогнозирования, не будут точно отражены в тропосферной поправке, полученной посредством ЧПП.
Погодный фронт обозначает границу раздела между воздушными массами: его определяют как большой объем воздуха, физические параметры которого являются в значительной степени однородными по горизонтали на протяжении сотен километров. Фронт может обозначать возникновение резких изменений содержания влаги в атмосфере, температуры и, следовательно, преломляющей способности. Фронты могут быть разделены на три класса: теплый, холодный и фронт окклюзии.
Наиболее быстрое изменение задержки сигналов в тропосфере, вероятно, происходит тогда, когда угол возвышения спутника и угол наклона фронта равны. В Великобритании системы фронтов перемещаются, как правило, со скоростью 30-50 километров в час и могут приводить к изменениям зенитной задержки, составляющим 3 сантиметра за час (см/ч). Задержки сигналов в тропосфере изменяются в соответствии с углом наклона относительно Земли, поскольку они описаны путем трассировки лучей, которую производят через метеорологические особенности, изменяющиеся по-разному как на различной высоте над уровнем моря, так и в различных точках местоположения.
Таким образом, сервер 200 в качестве входных данных берет информацию из региональной или глобальной модели численного прогнозирования погоды, в том числе данные о давлении, температуре и влажности, и вычисляет трехмерное поле показателя преломления их метеорологических данных. "Влажную" и "сухую" задержки сигналов в тропосфере получают для области, имеющей привязку к координатной сетке, которая соответствует зоне охвата ЧПП, на высотах, соответствующих базе данных о рельефе местности (которым может являться рельеф местности, используемый при ЧПП). Осуществляют их преобразование в зенитные задержки для тех же самых мест расположения на координатной сетке, в том числе для высоты, или их исходное вычисление этих зенитных задержек, при этом вычисление "влажных" и "сухих" зенитных задержек осуществляют из первой модели 210.
При вычислении разности между первой моделью и метеорологической моделью и, следовательно, изменений, которые необходимо применить к зенитным задержкам первой модели для обеспечения их точности, сервер вычисляет каждую из этих разностей как относительное изменение значения, полученного из первой модели, в виде процентного отношения.
Это дает два преимущества. Во-первых, установлено, что, несмотря на наличие фактических значений задержек и разностей, значения разностей находятся в небольшом интервале значений (приблизительно ±10%) относительно соответствующих значений первой модели; это позволяет создать меньший интервал значений поправок для их передачи, чем в случае использования разностей фактических значений. Во-вторых, это обеспечивает лучшее исправление значений зенитной задержки первой модели путем интерполяции.
Осуществляют передачу поправки BC%, заданной по определению как поправка для первой модели, выраженная в процентах, которая содержит изменение зенитной задержки на различной высоте. Поправки представлены в виде набора данных с привязкой к координатной сетке. Пользователь может осуществлять линейную интерполяцию своей тропосферной поправки по заданным значениям в соседних точках.
где


h0 - высота над средним уровнем моря, на которой вычисляют процентную долю передаваемой поправки,
φ - широта, на которой вычисляют процентную долю передаваемой поправки,
λ - долгота, на которой вычисляют процентную долю передаваемой поправки.
Пользователь может вычислить зенитную задержку следующим образом:

где

h1 - высота расположения пользователя.
Следует отметить, что в этом способе не требуется запоминание в приемнике пользователя набора данных о рельефе местности для ЧПП, для которого существует вероятность его изменения по мере эволюции модели ЧПП. Если пользователь находится в одной из узловых точек сетки, соответствующей передаваемым поправкам и на высоте h1=h0, то применяемая пользователем тропосферная поправка равна
Понятно, что существует предел пропускной способности при передаче, в особенности, для передачи данных спутником, и, в частности, спутниками ГНСС. Несмотря на то, что в будущем усовершенствования могут ослабить это ограничение, в настоящее время необходимо планировать передачу данных со скоростями передачи менее 500 бит/с, и обычно скорость передачи составляет 200-250 бит/с. Эта проблема усугубляется наличием спутников, которые неспособны осуществлять передачу в любые моменты времени, а могут осуществлять передачу только в пределах определенных "окон" передачи. С учетом этого, целесообразно, чтобы поправочные данные, полученные из моделей, являлись пригодными для сжатия данных.
На каждой из карт модели ЧПП задана сетка по региону, охватываемому картой, а модели обеспечивают получение зенитных задержек в соответствующих точках, и, таким образом, определен набор разностей (изменений или поправок), соответствующих упомянутым географическим точкам. Следовательно, для конкретного набора метеорологической информации в конкретный момент времени сервер может составить матрицу таких изменений зенитной задержки для различных мест расположения, охваченных картой организации.
Например, как упомянуто выше, Метеорологическая служба Великобритании (UKMO) имеет две модели ЧПП, так называемую глобальную модель и так называемую мезомасштабную модель. Первая из них имеет разрешающую способность, которая дает сетку из 432×325 точек, описывающих поверхность Земли, а мезомасштабная модель, которая представляет собой региональную модель с центром на Британских островах, имеет 146×182 узловых точек сетки.
Следовательно, существует двумерный массив в виде матрицы из наборов точечных поправок, каждая из которых представлена в виде многобитового слова. В частности, она может быть представлена в виде 8-битового слова, как в этом варианте осуществления изобретения.
Таким образом, в базовой станции существует географическое распределение поправок, по существу, представляющее собой 8-битовое полутоновое изображение карты поправок, и оно основано на конкретной Унифицированной модели или модели ЧПП, представляющей интерес. Такая карта может быть отображена визуально, поскольку это способствует пониманию, и чертеж Фиг. 4 содержит такое представление глобальной карты поправок.
Поскольку визуальное представление фактически состоит из числовых данных, соответствующих информации и ее распространению путем передачи, то понятно, что формат информации является пригодным для способов сжатия данных, используемых для таких двумерных изображений с целью уменьшения размера файла данных или информации для их распространения путем передачи.
Может быть использована карта данных со сжатием без потерь данных или с потерей данных, но в этих вариантах осуществления изобретения сервер производит сжатие изображения с потерей данных; в предпочтительном варианте сжатие осуществляют в соответствии со стандартом JPEG2000 (на основе "коротковолнового" (wavelet) сжатия), хотя для уменьшения размера файла с информацией могут быть использованы и другие стандарты, например стандарт JPEG (на основе косинусного преобразования), или иные способы, например простое взятие подвыборки.
В этом месте описания целесообразно снова рассмотреть приемник пользователя. Поскольку прием сигнала с поправочными данными из спутника ГНСС осуществляют вместе с обычными сигналами, то не требуется каких-либо специальных приемных схем. Набор данных о поправках (изображение) подают в процессор, обеспечивающий вычисление зенитной задержки, который, как описано выше, декодирует изображение для использования значений отдельных элементов изображения в качестве поправок. Такое декодирование может быть осуществлено аппаратным средством, встроенным в приемник, или же такое декодирование может быть осуществлено посредством программного обеспечения, загруженного в центральный процессор этого приемника; программное обеспечение для распаковки файла изображения в формате JPEG является хорошо известным.
Например, если размер файла изображения без сжатия равен, приблизительно, 141 кб, то при коэффициенте сжатия, равном 35 (уменьшающем размер файлов до 4 кб), при сжатии возникает лишь небольшой шум, но при большем коэффициенте сжатия, равном 140 (уменьшающем размер файлов до 1 КБ), шум при сжатии становится явно заметным. Это также показано в графическом виде на Фиг. 5.
Понятно, что условия для функций "влажной" задержки являются значительно более сложными и приводят к созданию файлов большего размера, чем функции "сухой" задержки. Таким образом, за счет разделения функций "влажной" и "сухой" задержки, в результате чего можно обоснованно ожидать, что сжатые файлы будут иметь размер, соответственно, порядка 9 кб и 1 кб, необходимо осуществлять передачу приблизительно 88000 битов.
Этот набор данных может быть передан в виде одного изображения во все спутники из группы спутников. В этом варианте осуществления изобретения способность выполнения передачи данных с такой низкой скоростью передачи реализована за счет осуществления передачи в спутники ГНСС полных изображений с высокой скоростью передачи/с большой длительностью, или только лишь части изображения, соответствующего тому региону на карте, который связан с конкретным спутником, или путем разделения между спутниками таким образом, чтобы каждый из них осуществлял прием только лишь соответствующей ему части, что позволяет производить дополнительное сжатие с коэффициентом три в требуемое время приема; то есть при скорости передачи данных, равной 250 бит в секунду, на передачу и прием затрачивается приблизительно 2 минуты.
Таким образом, каждый из спутников ГНСС способен осуществлять вместе с нормальными сигналами широковещательную передачу сигналов с поправками, которые каждый приемник пользователя может использовать при моделировании зенитной задержки сигналов в тропосфере для введения поправок в значения, используемые в модели, в соответствии с, по существу, текущими метеорологическими условиями, относящимися к его местоположению.
Понятно, что скорость передачи распространяемых данных важна как с технической, так и с экономической точки зрения. Во-первых, пропускная способность при передаче данных, доступная для передачи дополнительной информации в свободных временных интервалах, является ограниченной, по меньшей мере, в текущих вариантах реализации ГНСС.
Несмотря на то, что для других типов данных решение может состоять в увеличении длительности акта передачи, в случае обновления данных, зависящих от погоды, этот вариант является нецелесообразным. Поскольку изменения погоды и погодные условия перемещаются по поверхности Земли и, следовательно, по координатным сеткам, используемым в метеорологической модели, то существует элемент со сроком действия, то есть промежуток времени и/или расстояние, для которого желательное значение задержки сигналов в тропосфере является достоверным. Полагают, что такой срок действия составляет порядка одного часа и/или соответствует размеру сетки от 50 до 90 км. Таким образом, если пользователь должен полагаться на значения задержки сигналов в тропосфере, генерация которых осуществлена на основании метеорологических данных (путем введения поправок), то это должно быть выполнено в пределах такого срока достоверности или местоположения, для которых была осуществлена их генерация. Таким образом, с точки зрения передачи данных пользователю, передача должна быть осуществлена с такой скоростью передачи, чтобы пользователь мог выполнить прием и обработку информации за то время, пока она еще остается достоверной. Скорости передачи со спутников являются не только медленными по скорости передачи двоичных данных, но и прерывистыми по возможности их использования для загрузки такой информации с поправками. Таким образом, существует настоятельная необходимость в выполнении сжатия данных для обеспечения передачи набора поправочных данных (изображения), пока данные сохраняют "жизнеспособность".
Кроме того, время, затрачиваемое на загрузку набора поправочных данных (изображения), не должно быть чрезмерно продолжительным, чтобы не вызвать отказ пользователя от ожидания в течение промежутка времени, требуемого для выполнения загрузки, распаковки файла данных, представленных в виде изображения, и вычисления местоположения.
Следовательно, важно реализовать такую степень сжатия данных/сжатия изображения, которая обеспечивает достижение этих различных целей.
С учетом приведенного выше описания "жизнеспособности" значений задержки (и полученных поправок) следует отметить следующее: используя данные, основанные на методе с использованием модели ЧПП, фактически возможно прогнозировать метеорологические условия и получать задержки сигналов в тропосфере для любой заданной точки заранее, за несколько часов, несмотря на то, что "жизнеспособность" спрогнозированной задержки сигналов в тропосфере является относительно малой (как описано выше), причем однажды она является текущей в спрогнозированный момент времени.
Следовательно, существует возможность создания не только набора задержек сигналов в тропосфере (в виде зенитных задержек сигналов в тропосфере), соответствующего узловым точкам координатной сетки региона, но также и создания соответствующих наборов, спрогнозированных для будущих моментов времени. Таким образом, сервер может получить спрогнозированный набор из наборов поправок.
Может быть целесообразным вариант, в котором сервер может быть занят созданием поправок для задержки только лишь периодически, поскольку спрогнозированный набор может быть запомнен, а его элементы, которыми являются наборы поправок для конкретных моментов времени, могут быть извлечены тогда, когда наступает этот момент времени, а набор является достоверным.
В альтернативном варианте этот спрогнозированный набор может быть передан и запомнен в спутнике для извлечения и ретрансляции наборов поправок в те моменты времени, для которых достоверность является текущей, или может быть аналогичным образом запомнен в приемнике для его извлечения.
Несмотря на способность не только создавать, но и загружать спрогнозированные наборы данных в удаленные устройства, фактически, в настоящее время узким местом при передаче данных является загрузка данных со спутника (в частности, со спутника ГНСС) пользователю.
Для уменьшения размера файла с набором поправочных данных, предназначенного для передачи пользователю со спутника, он может быть устроен таким образом, что осуществляет передачу только тех поправок для задержки, которые применимы для пользователей в пределах зоны действия, то есть в пределах зоны видимости спутника, не передавая данные для пользователей в других точках земного шара. Это может быть осуществлено посредством сервера, определяющего, какую именно часть набора поправочных данных следует загрузить в любой конкретный спутник, с учетом тех пользователей, которые могут осуществлять доступ к нему, или же сервер может загрузить глобальный набор данных, а спутник определяет, какую именно часть набора ему следует ретранслировать.
Приведенное выше описание было сосредоточено на описании получения, передачи и использования поправок для значений зенитной задержки сигналов в тропосфере, являющихся главными источниками погрешностей при определении местоположения, которые не могут быть исправлены посредством первой модели, имеющейся в приемнике пользователя.
Как упомянуто выше, в первой модели также используют отображающую функцию, в которой используют параметры, также зависящие от атмосферы и учитываемые посредством элементов, используемых в модели климата, а именно функции времени года (a), широты (b) и высоты (c) над уровнем моря. Они могут быть также скорректированы посредством наборов поправок, полученных в сервере. Эта отображающая функция может быть выражена следующим образом:
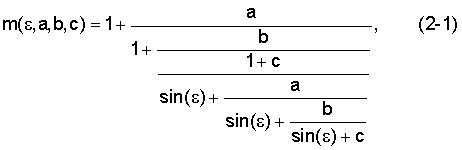
где ε - угол возвышения.
Это выражение может быть представлено в следующем виде:
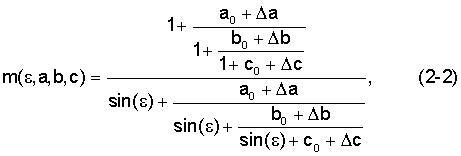
где a0, b0 и c0 - значения из первой модели, а Δa, Δb и Δc - поправки, которые следует применить к ним для того, чтобы осуществить отображение угла возвышения, получаемого посредством метеорологической модели.
Путем процедуры подбора, действующей таким образом, чтобы минимизировать сумму квадратов разностей между уравнением (2-2) и лучом, полученным путем трассировки, (истинным), может быть получен набор значений поправок, составленный из Δa, Δb и Δc, в виде аналогичного файла данных, представленных в виде изображения, или наложенный на файл зенитных поправочных данных, представленных в виде изображения, путем увеличения длины содержащихся в нем слов таким образом, чтобы он включал в себя элементы в виде слов, содержащие эти поправки.
Кодирование и декодирование передачи и приема выполняют так же, как и раньше, за исключением того, что теперь в приемнике имеются значения поправок для их использования вместе с параметрами отображающей функции, посредством чего обеспечивают более точное отображение как зенитной задержки, так и ее значений, отображенных на карте.
Понятно, что в состав функций отображения угла возвышения могут быть включены следующие параметры: долгота и время суток, и на них может быть распространен вышеописанный принцип получения численного решения.
Несмотря на то, что использование ЧПП является удобным и во многих отношениях целесообразным, в сочетании с ним могут быть использованы и другие источники метеорологической информации для введения поправок в доступные данные. Вместо ЧПП может быть использована любая иная метеорологическая модель с трехмерным представлением атмосферы. Понятно, что задержки сигналов в тропосфере, полученные посредством ЧПП, заданы на сетке, размер ячейки которой ограничен используемой моделью ЧПП. Множество погодных особенностей, которые характеризуются высоким содержанием влаги и могут создать задержку сигналов в тропосфере, таких как, например, грозы, может оказаться ниже порога разрешающей способности модели ЧПП. Однако существует несколько источников данных, например, передаваемые со спутников изображения, по существу, являющиеся размерными, посредством которых может быть распознано с высокой разрешающей способностью существование таких особенностей, а содержащаяся в них информация может быть использована для изменения значений ЧПП в конкретной ячейке сетки для учета таких особенностей по всей сетке ЧПП.
Вышеописанный вариант осуществления изобретения предназначен для того, чтобы приемник пользователя, снабженный встроенной первой, неметеорологической моделью, мог более точно определять свое местоположение, чем это возможно с использованием только лишь одной модели. Понятно, что частью вычисления решения является получение значения времени с точностью, которую позволяет реализовать интерпретация задержки сигналов в тропосфере, обеспечиваемая моделью. Для некоторых пользователей важна именно функция времени, и такой пользователь может знать точное местоположение неподвижного приемника.
Со ссылкой на чертеж Фиг. 6, на нем показана схема второго варианта осуществления ГНСС 500. Приемник 520 пользователя аналогичен приемнику 120 пользователя, но в нем отсутствует (или отключена) первая, неметеорологическая модель.
Сервер 600 аналогичен серверу 200, за исключением того, что первая, неметеорологическая модель также отсутствует, а передача является наземной, а не через спутник. В сервере имеется метеорологический процессор 650, который использует трехмерное поле показателя преломления, генерация которого осуществлена описанным выше способом, на основании данных ЧПП, которые могут быть дополнены дополнительными метеорологическими данными, и осуществляет трассировку лучей, будучи способным получать значения задержки сигналов в тропосфере для региона, охваченного данными ЧПП. Однако сервер также принимает или имеет запомненные в нем данные, связанные с местоположением пользователя в земных координатах и углом возвышения и азимутальным углом спутника относительно пользователя или указывающие их. Таким образом, сервер не моделирует простое значение зенитной задержки, но способен вычислять из исходных данных соответствующее значение задержки сигналов в тропосфере или выбирать одно из нескольких значений задержки, поставленных в соответствии правильным углам для местоположения пользователя. Следовательно, сервер осуществляет передачу реального значения задержки пользователю средствами беспроводной или проводной связи для того, чтобы пользователь мог получить более точное значение времени и при необходимости подтвердить свое местоположение. Понятно, что поскольку метеорологические данные получены для прогноза, то вычисление значения задержки и его передачу не обязательно нужно выполнять в реальном масштабе времени, это может быть выполнено перед его использованием. Подобным образом могут быть реализованы вычисление и передача не только одного значения задержки сигналов в тропосфере, но способом, аналогичным тому, который был описан применительно к системе 200, может быть получен и запомнен спрогнозированный набор значений задержки, при этом каждый элемент набора извлекают и используют тогда, когда он становится текущим с учетом момента времени, для которого сделан прогноз. Если сервер используют для других целей, то спрогнозированный набор может быть запомнен в сервере для передачи его элементов в надлежащие моменты времени, или же набор может быть передан в приемник пользователя и запомнен в нем, а извлечение элементов набора осуществляют по мере того, как они становятся текущими. Также понятно, что передача может быть осуществлена через спутник с использованием, в случае необходимости, сжатия данных.
Изложенное выше раскрытие сущности изобретения может быть обобщено следующим образом.
Сервер вычисления тропосферных поправок берет в качестве входных данных информацию из региональной или глобальной модели численного прогнозирования погоды, в том числе данные о давлении, температуре и влажности. Для дополнения данных ЧПП и для помощи при внесении поправок на очень малые метеорологические особенности (которыми являются, например, локальные конвективные шторма) могут быть использованы дополнительные метеорологические данные, например оценочные значения содержания водяного пара, полученные с высокой разрешающей способностью по результатам наблюдений со спутников в инфракрасном диапазоне.
Сервер вычисления тропосферных поправок вычисляет трехмерное поле показателя преломления из метеорологических данных. Вычисляют "влажную" и "сухую" зенитные задержки для области, имеющей привязку к координатной сетке, которая соответствует зоне охвата ЧПП, на высотах, соответствующих базе данных о рельефе местности (которым может являться рельеф местности, используемый при ЧПП). В варианте сервера 200 вычисление "влажной" и "сухой" зенитных задержек для тех же самых мест расположения на сетке, в том числе для высоты, осуществляют по априорной модели. Затем сервер вычисляет разность между прежними зенитными задержками и зенитными задержками, полученными на основании результатов метеорологических наблюдений, в виде процентного отношения. Имеющий привязку к координатной сетке набор данных из "влажных" и "сухих" поправок, выраженный в виде процентного отношения, затем дискретизируют и сжимают с использованием способа сжатия изображений с потерями. Затем сжатое изображение, содержащее данные, необходимые для декодирования изображения, передают в станцию связи Земля-спутник (являющуюся частью наземной инфраструктуры спутниковой навигационной системы). Данные изображения связаны с текущим состоянием атмосферы и могут также содержать изображения, спрогнозированные на несколько часов вперед. Загрузка данных может быть осуществлена с одной или с большего количества станций связи Земля-спутник, и они могут быть переданы с наземной станции в один или в большее количество спутников. Данные могут быть глобальными или региональными по своей сущности. Данные, переданные в каждый спутник, могут быть ограниченными по территории, при этом группа спутников обеспечивает глобальную зону охвата, несмотря на то, что данные каждого спутника не обеспечивают этого.
Пакетная загрузка в спутники изображений, спрогнозированных на несколько часов вперед, может быть использована для снижения нагрузки на наземную инфраструктуру спутниковой навигационной системы. Каждый спутник передает наиболее пригодное, наиболее соответствующее текущему моменту времени тропосферное изображение в качестве части навигационных данных спутниковой навигационной системы.
Имеющаяся у пользователя система отслеживания спутникового навигационного сигнала осуществляет прием тропосферных изображений, при этом стандартные навигационные данные содержат параметры, определяющие орбиту спутника, и производит наблюдения за псевдодальностью и накопленной несущей. Выполняют распаковку сжатых изображений "влажной" и "сухой" тропосферных поправок. Вычисляют априорные значения "влажной" и "сухой" зенитных задержек. Априорная модель "влажной" и "сухой" зенитных задержек представляет собой ту же самую модель, которую используют в сервере вычисления тропосферных поправок. Затем вычисляют "влажную" и "сухую" зенитные задержки для пользователя, соответствующие местоположению пользователя, с использованием интерполяции между соседними точками данных, имеющими привязку к координатной сетке.
Затем "влажную" и "сухую" зенитные задержки при прохождении сигнала преобразуют в функции отображения угла возвышения спутника для конкретного спутника с использованием поправок для псевдодальности. Наконец вычисляют стандартное навигационное решение, но с добавлением поправок для задержки сигналов в тропосфере, полученных на основе результатов метеорологических наблюдений.
Более всестороннее описание факторов, которые оказывают влияние на реализацию системы определения местоположения, способов численного прогнозирования погоды и получения скорректированной информации о задержке сигналов в тропосфере, полученной из результатов метеорологических измерений и основанной на них, может быть найдено в статье М. Пове, Дж. Бутчера и Дж. Оуэна (M Powe, J Butcher and J Owen) "Tropospheric Delay Modelling and Correction Dissemination using Numerical Weather Prediction Fields" в сборнике "Proceedings of GNSS 2003", которая включена в заявку на изобретение, притязание на приоритет которой имеет настоящая заявка на изобретение, и которая включена сюда путем ссылки.
Реферат
Изобретение относится к технике связи. Технический результат состоит в повышении точности определения местоположения в условиях наличия погрешностей, вызванных тропосферой. Для этого в способе получения данных для их использования приемником спутниковой системы определения местоположения или ГНСС получают данные из приемника с помощью удаленного сервера, используют метеорологическую информацию и региональную или глобальную трехмерную карту узловых точек сетки, из которых он вычисляет тропосферные задержки путем трассировки лучей через поле преломляющей способности, полученное из результатов измерений атмосферного давления, температуры и данных о содержании влаги, причем эти результаты измерений могут быть получены из метеорологических служб. В том случае, когда этот способ используют для уточнения местоположения, определенного приемником пользователя, который содержит неметеорологическую модель, основанную на данных о климате, которая дает зенитные задержки и средство для установления их соответствия конкретным углам наклона, сервер также содержит копию такой неметеорологической модели и обеспечивает получение соответствующих ей значений задержки путем трассировки лучей в виде зенитных задержек. В сервере производят сравнение наборов значений зенитной задержки для соответствующих узловых точек сетки и вычисляют изменения в предпочтительном варианте в виде относительных значений, на которые необходимо скорректировать значения задержки, полученные посредством неметеорологической модели, для обеспечения их точности. Наборы поправок подвергают сжатию способами сжатия изображений и передают через спутники ГНСС с низкой скоростью передачи данных в приемник пользователя, а этот приемник просто применяет поправки к зенитным задержкам, полученным посредством его собственной модели. Если местоположение пользователя известно, то сервер может сразу же получать точные значения задержки сигналов в тропосфере для местоположения приемника для непосредственной их передачи. 5 н. и 33 з.п. ф-лы, 7 ил.
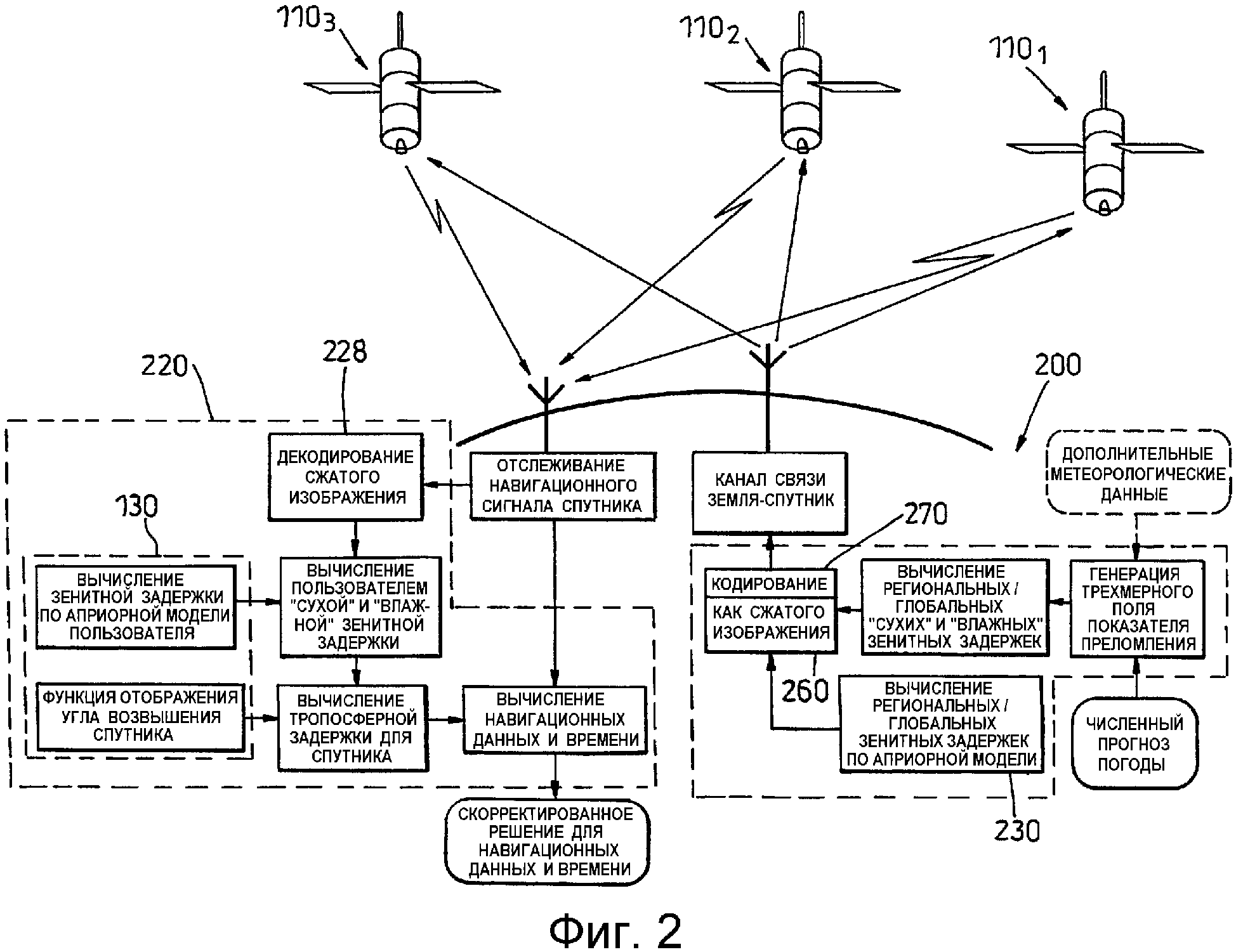
Комментарии