Одноэтапный метод пеленгования источников излучения в дкмв диапазоне с применением фазированной антенной решетки, состоящей из взаимно ортогональных симметричных горизонтальных вибраторов - RU2614035C1
Код документа: RU2614035C1
Чертежи
Описание
Область техники
Изобретение относится к радиотехнике, а именно к способам пассивной радиолокации, состоящей в определении пеленга на источники радиоизлучения (ИРИ), создающие электромагнитные волны в декаметровом диапазоне (ДКМВ).
Изобретение используется для решения технической задачи, состоящей в пеленгации наземных, надводных и воздушных объектов, оснащенных техническими средствами, излучающими электромагнитные волны в декаметровом диапазоне как в процессе штатной работы, так и непосредственно для решения задачи определения собственного местоположения в условиях, когда требуется повышенная точность оценки координат объекта или в случае, когда использование спутниковых и наземных систем радионавигации оказывается недостаточным для достижения требуемой точности. Кроме того, определение пеленга на объект будет использоваться перед установлением сеанса радиосвязи в декаметровом диапазоне для формирования узкой диаграммы направленности приемных и передающих антенн технического средства системы связи.
Технический результат изобретения заключается в повышении точности оценки пеленга ИРИ и увеличение рабочей дальности пеленгатора, что эквивалентно возможности формирования оценки при меньших отношениях сигнал-шум, при любом типе поляризации электромагнитной волны, принимаемой в декаметровом диапазоне длин волн.
Уровень техники
Актуальность решения задач пеленгования источников электромагнитного излучения в ДКМВ диапазоне обусловлена возрастающей интенсивностью использования данного диапазона при решении задач мониторинга и связи, в т.ч. с изолированными абонентами, находящимися в высокоширотных районах, где спутниковые системы связи оказываются малоэффективными. Решение технических задач в ДКМВ диапазоне осуществляется с применением широкого парка существующих и перспективных систем, использующих множество сложных сигналов, пеленгация которых может выполняется в условиях априорной неопределенности относительно их формы и параметров.
В монографии [1] рассмотрен способ осуществления радиопеленгации, состоящий в приеме электромагнитных сигналов, создаваемых передатчиком на борту воздушного судна, с помощью кольцевой антенной решетки с последующим измерением фаз принятых сигналов. После измерения фаз выполняется реконструкция полных фаз, состоящая в устранении цикличности фазовых измерений, что позволяет выполнить расчет азимута и угла места по реконструированным полным фазам. Основной недостаток предложенного способа состоит в том, что точность измерения угла места вблизи нулевого значения оказывается низкой; это происходит в силу того, что погрешности измерения предложенного способа оказываются обратно пропорциональными его синусу. Дополнительный недостаток заключается в алгоритмической сложности выполнения процедуры фазовой реконструкции.
Способ, представленный в патенте [2], близок к предлагаемому тем, что в нем также предусмотрено использование одноэтапных процедур. Поставленная задача повышения точности определения координат ИРИ решается путем применения одноэтапной обработки на базе одного измерителя и результат достигается посредством проведения измерений перемещающимся в пространстве пеленгатором первичных информационных параметров обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения пеленгатора и пространственной ориентации его антенной решетки. Помимо этого производится многократное повторное измерение совокупности первичных и вторичных параметров в процессе перемещения пеленгатора по свободной траектории в пределах зоны контроля, разбитой на элементарные зоны привязки. К недостаткам предложенного способа можно отнести то, что для получения точных оценок местоположения необходимо проведение серии измерений с использованием подвижного пеленгатора, что при проведении измерений в ДКМВ диапазоне может потребовать учета изменения картины отражения от ионосферы для разных точек проведения измерения.
В патенте [3] повышение точности определения местоположения достигается на основе дополнительной информации, получаемой в результате разделения лучей многолучевого поля принимаемого сигнала и моделирования процесса распространения радиоволн в трехмерно неоднородной ионосфере, что по мнению изобретателей дает возможность коррекции отклонений лучевых траекторий сигнала по дальности и по направлению путем учета наклонов отражающего слоя ионосферы и устранения неоднозначности однопозиционного измерения координат путем сопоставления траекторий. Недостатком предложенного в [3] подхода является то, что достижение теоретически предельной точности местоопределения в ДКМВ диапазоне ограничивается существенной априорной неопределенностью параметров среды распространения пространственных радиоволн и несовершенством применяемых способов обработки принимаемых сигналов.
В патенте [4] для достижения повышения точности местоопределения объекта предлагается способ, основанный на поиске декаметровых передатчиков, включающий синхронный прием радиосигналов несколькими разнесенными в пространстве станциями, за счет формирования необходимого и достаточного для эффективного поиска в заданных пространственных областях сокращенного множества энергетически доступных частот поиска и сокращенного множества необходимых углов места поиска. Недостаток предложенного решения обуславливается использованием разностно-дальномерного способа, эффективность которого ограничивается наличием аномально больших ошибок определения линии положения, обусловленных отличием групповой скорости распространения радиоволн в ионосфере и в свободном пространстве.
В патенте [5] технический результат, состоящий в повышении точности измерения угла места, достигается за счет того, что способ включает прием сигналов источника радиоизлучения с помощью антенн, образующих кольцевую решетку, размещаемую вблизи и параллельно земной поверхности, определение азимута объекта по принятым антенной решеткой сигналам, измерение комплексных амплитуд принятых сигналов и преобразование измерений в угловой спектр путем умножения на комплексно-сопряженные диаграммы направленности антенн, суммирования результатов умножения по совокупности антенн и определения квадрата модуля суммы. К недостаткам предложенного способа необходимо отнести, во-первых, то, что для его реализации требуется размещение вспомогательных антенн, а, во-вторых, то, что ориентации диаграмм направленности требуется предварительное оценивание, в процессе которого возможно появление аномальных ошибок.
Использование пары симметричных ортогональных вибраторов для построения антенного элемента было впервые предложено в 1935 г. в патенте [6]. Версии данных антенн продолжают быть предметом исследования благодаря простоте их конструкции, селективным поляризационным свойствам и возможности всенаправленного приема сигналов с линейной и горизонтальной поляризацией [7]. Однако большинство прототипов и образцов таких антенн имеют строго фиксированный фазовый сдвиг между парами ортогональных вибраторов [8], который выбирается практически всегда равным 90 градусам. Такой выбор, во-первых, ограничивает возможности приема поляризованных волн только одним направлением вращения вектора электрического поля (направлением вращения только по часовой стрелке или только против). Во-вторых диаграмма направленности, сформированная при сдвиге 90 градусов является всенаправленной, что делает невозможным оценку направления прихода сигнала. В-третьих, использование антенны в нескольких частотных диапазонах приводит к формированию в них различных диаграмм направленности в силу того, что на разных частотах будет формироваться разный фазовый сдвиг.
Раскрытие изобретения
Технический результат изобретения заключается в повышении точности оценки пеленга ИРИ, представляющего собой вектор оцениваемых параметров θ=(α,β)T, и увеличении дальности работы пеленгаторов при любом типе поляризации электромагнитной волны, принимаемой в декаметровом диапазоне длин волн.
Для достижения технического результата предлагается метод, основанный на одноэтапной процедуре параметрического оценивания, состоящей в формировании решающей функции, зависящей непосредственно от оцениваемых параметров - азимута и угла места - и ее последующей максимизации. Для составления решающей функции предлагается осуществление многоканального параллельного приема электрических сигналов, сформированных отдельными точками приема фазированной антенной решетки (ФАР) пеленгатора. ФАР пеленгатора представляет собой распределенный в пространстве набор антенных элементов, представляющих собой пары взаимно ортогональных симметричных вибраторов, ориентированных в горизонтальной плоскости, с независимым приемным каналом каждого из вибраторов в паре. Предлагаемый способ решения реализуется посредством многоканальной квадратурной демодуляции, аналогово-цифрового преобразования и централизованной цифровой обработки сигналов, которая выполняется посредством цифровых ЭВМ или специализированных вычислителей.
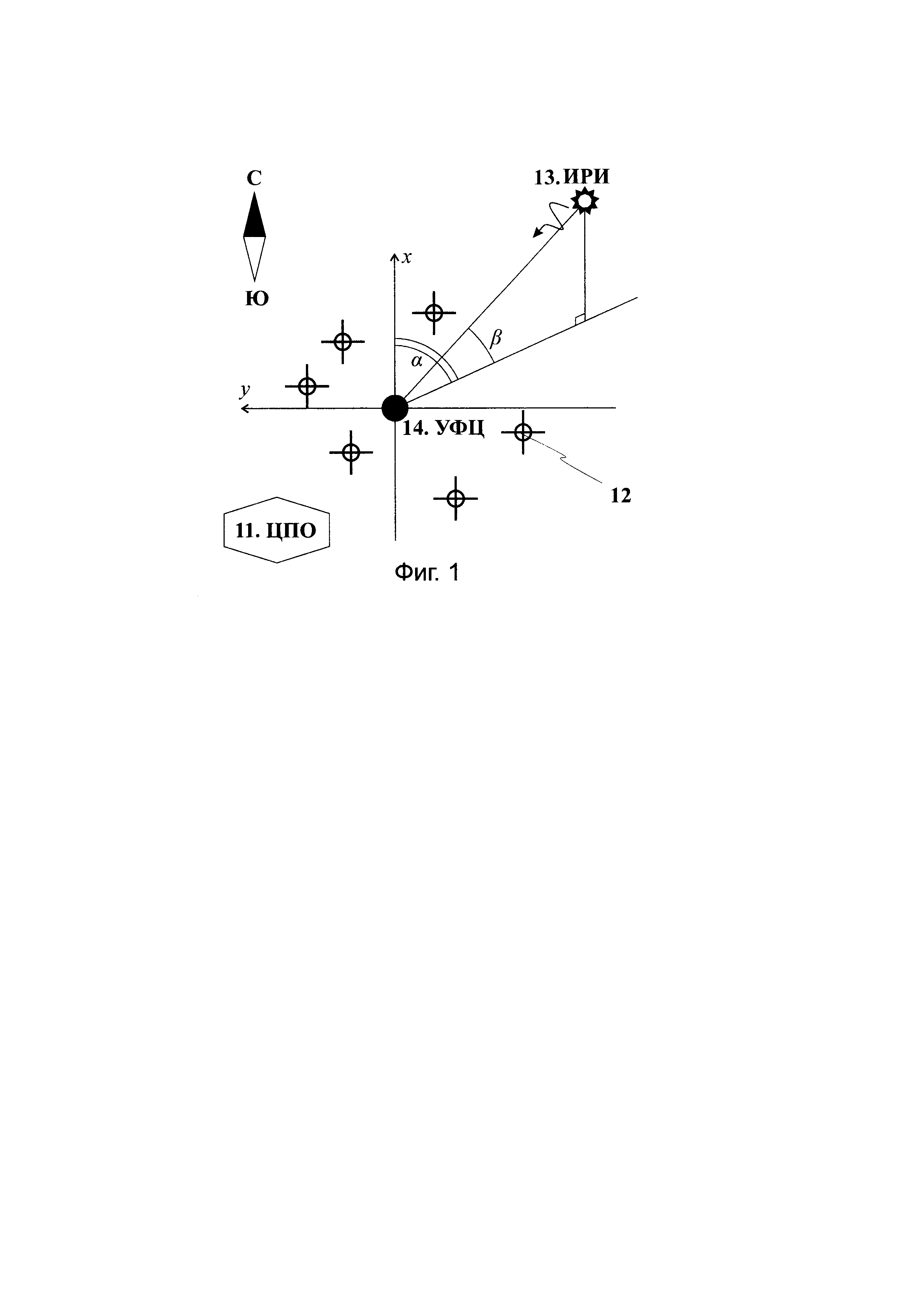
На фиг. 1 представлена схема размещения на местности пеленгатора, состоящего из центрального пункта обработки (ЦПО) (11) и фазированной антенной решетки, состоящей из отдельных антенных элементов, представляющих собой пары взаимно ортогональных вибраторов (12), размещенных в горизонтальной плоскости. Источник радиоизлучения (ИРИ) (13) создает радиосигнал в декаметровом диапазоне длин волн с произвольной, в том числе и эллиптической, поляризацией. Данный источник виден относительно условного фазового центра (УФЦ) антенной решетки (14) в направлении, описываемом парой углов: азимутом α, отсчитываемым от направления на географический север, и углом места β, отсчитываемом от горизонтальной плоскости, параллельной поверхности Земли.
Источник радиоизлучения вдоль собственных осей ориентации у и z формирует произвольный сигнал, для описания которого при минимальном знании о его свойствах используется модель гауссовского радиосигнала [9]:
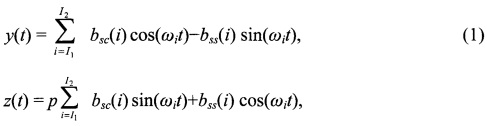
где, bsc(i), bss(i) - взаимно независимые гауссовские случайные величины с нулевыми средними M[bsc(i)]=M[bss(i)]=0, при этом их дисперсии одинаковы;


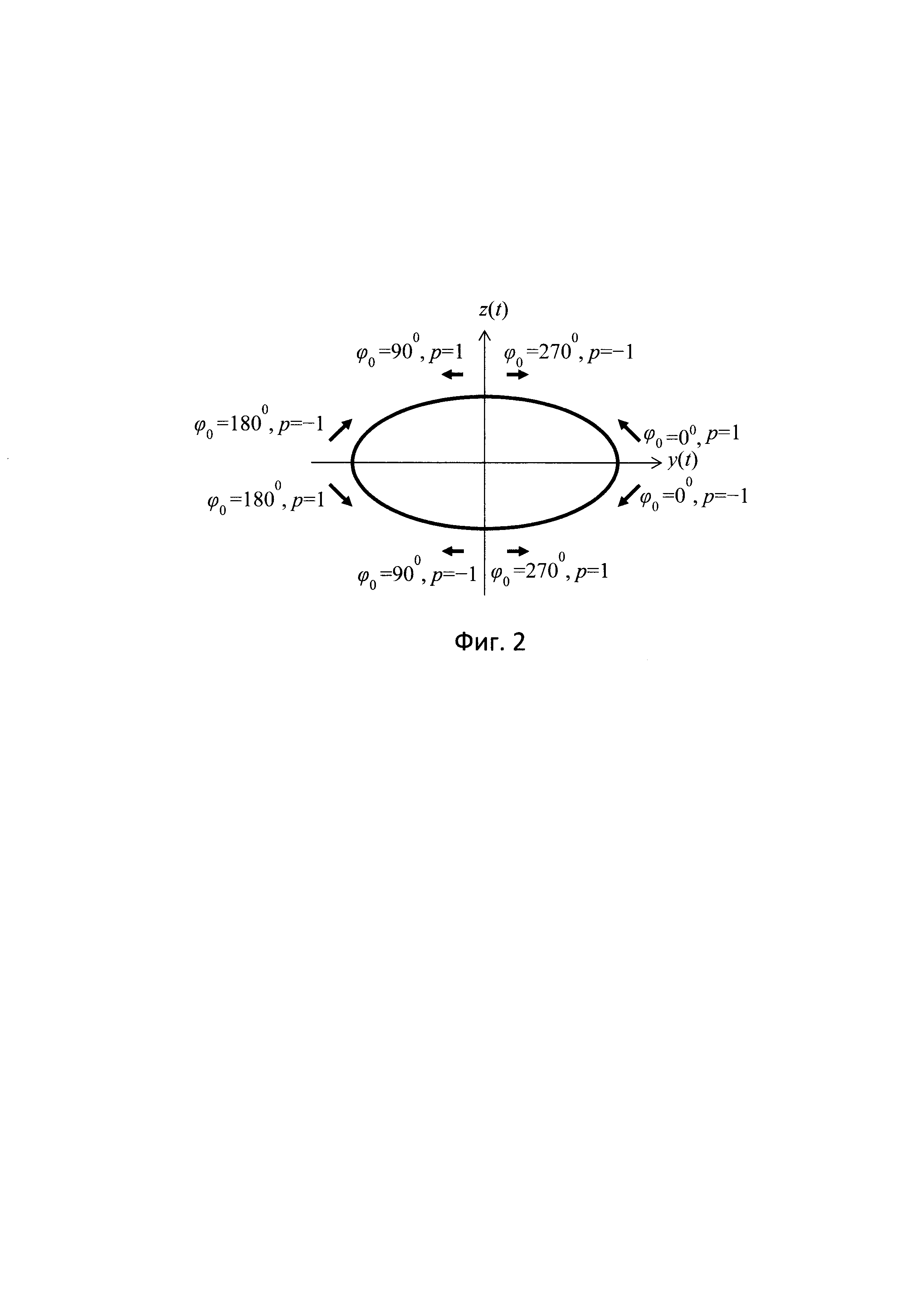
Смысл параметра р в данной модели, отличающейся от модели, представленной, например в [11], поясняется фиг. 2. Так при значении при р=1 вектор электрической компоненты электромагнитной волны поворачивается против часовой стрелки. Это означает, по направлению от положительного направления оси у к положительному направлению оси z имеет место положительный сдвиг фазы 90 градусов. При значении р=-1 вектор электрического поля поворачивается против часовой стрелки, следовательно, по направлению от положительного направления оси у к положительному направлению оси z имеет место отрицательный сдвиг фазы 90 градусов, что эквивалентно, с учетом периодичности, положительному сдвигу 270 градусов.
Преобразование Фурье от выражения (1) позволяет записать для каждой частоты ωi значение комплексной амплитуды:

Для сигнала с априорно неизвестной структурой спектра [10] полагается, что совместная двумерная плотность вероятности величин bsc(i) и bss(i) имеет вид:

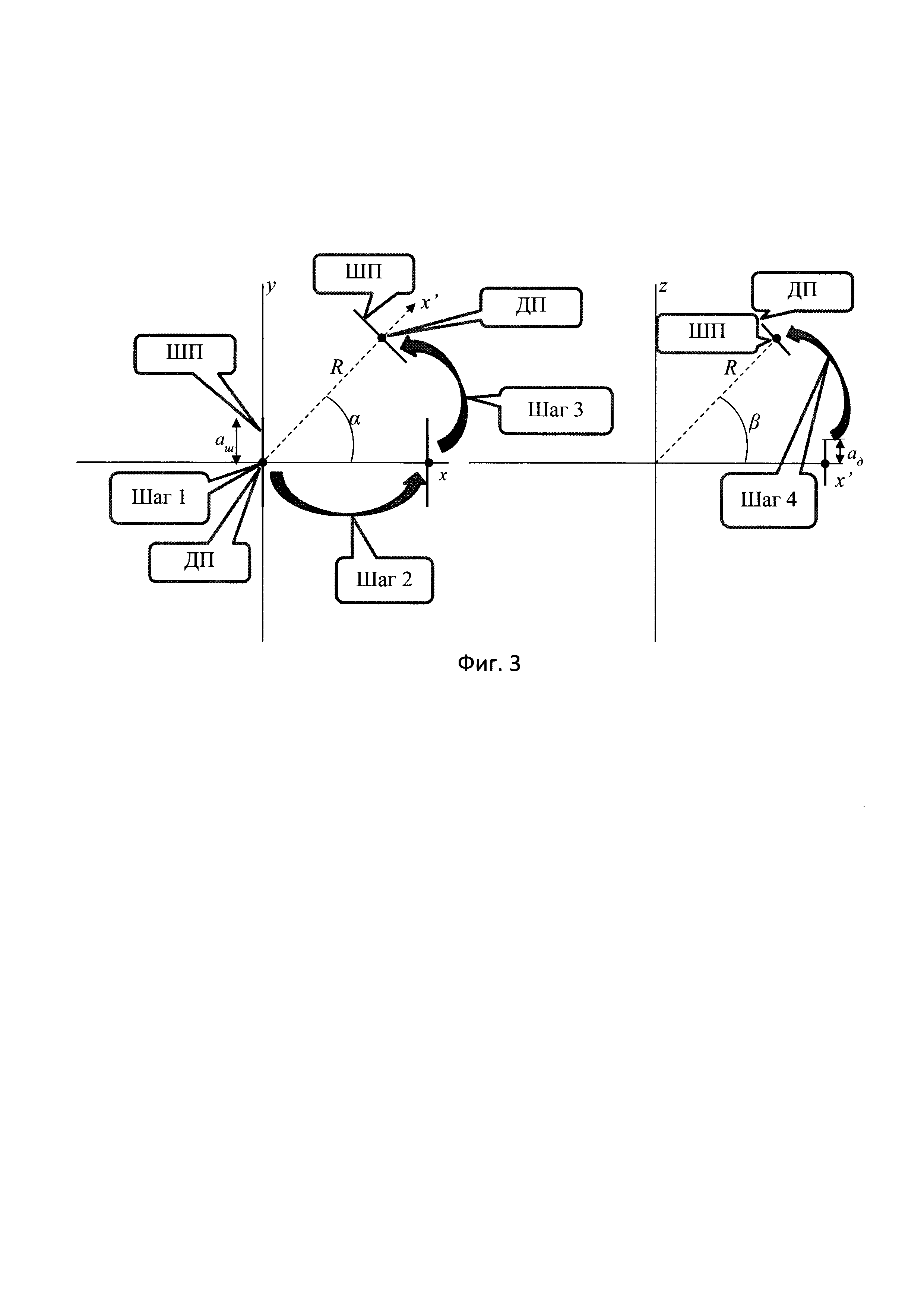
Использование декаметрового диапазона предполагает, что при распространении сигнала он подвергается искажениям, в том числе связанным с отражением от ионосферы, последовательность и характер которых учесть крайне затруднительно. Однако для решения задачи предлагаемым способом используется параметрическая модель ортогональных виртуальных вибраторов (ОВВ) для учета изменения двух компонент поляризации: широтной поляризации (ШП) и долготной поляризации (ДП). Данная модель представлена на фиг. 3 и состоит из четырех последовательных шагов, на каждом из которых преобразование осуществляется за счет поворота или сдвига системы координат. На первом шаге ортогональные виртуальные вибраторы формируют сигнал вдоль осей у и z. На втором шаге осуществляется перемещение ОВВ вдоль оси х на расстояние R. На третьем шаге производится вращение ОВВ в плоскости ху на угол α относительно начала координат. Завершающее преобразование, выполняемое на четвертом шаге, состоит во вращении ОВВ в плоскости х 'z (х' - трансформированная ось после поворота на шаге 3) на угол β относительно начала координат.
Использование модели виртуальных вибраторов с учетом сдвига начальной фазы на Ф, направления вращения эллиптической поляризации р, ослабления (усиления) сигнала в А раз и поворота оси эллипса на угол Θ при его распространении позволяет записать компоненты спектра сигнала принятого в m-й точке приема (ТП) в следующем виде:

где





Для широтного коэффициента



а для долготного коэффициента




Решающая функция метода, составленная на основе максимизации условного правдоподобия для сигналов представленной модели [1, 4], имеет следующий общий вид:


Сформированная решающая функция


Избавление решающей функции (5) от зависимости от побочных параметров






где компоненты выражения




Компоненты


После подстановки

Для упрощения дальнейшей минимизации используется параметрическая подстановка, состоящая в том, что через вспомогательные угловые параметры χ и ψ выражаются отношения:
При формировании функции (8) отыскания непосредственных значений углов ψх и ψу оказываются не нужными, но требуется отыскание их разности ψ=ψу-ψх. Данная оценка формируется из следующего соотношения:

где используется величина


где оценка χ формируется следующим образом:

Тогда выражение для решающей функции приобретает вид функции, зависящей только от оцениваемых параметров азимута и угла места:

Оцениваемое значение азимута и угла места определяется как максимум в пространстве параметров решающей функции:

Развитие теоретических основ корреляционного метода для возможности его применения к решению задачи определения местоположения ИРИ описано в работе [9]; базируясь на предложенном подходе, предлагаемый способ выполняет построение решающей функции относительно вектора оцениваемых параметров θ=(α, β)T, содержащего два угла пеленга на ИРИ. Затем осуществляется поиск максимума решающей функции с использованием методов численной оптимизации. Доставляющий максимум решающей функции вектор θmax полагается решением задачи определения местоположения. Такой способ оценки является одноэтапным и позволяет исключить вычисление промежуточных оценок для фазовых сдвигов и времен задержек, что позволяет уменьшить вероятности появления аномальных ошибок при отношениях сигнал-шум менее 10 дБ.
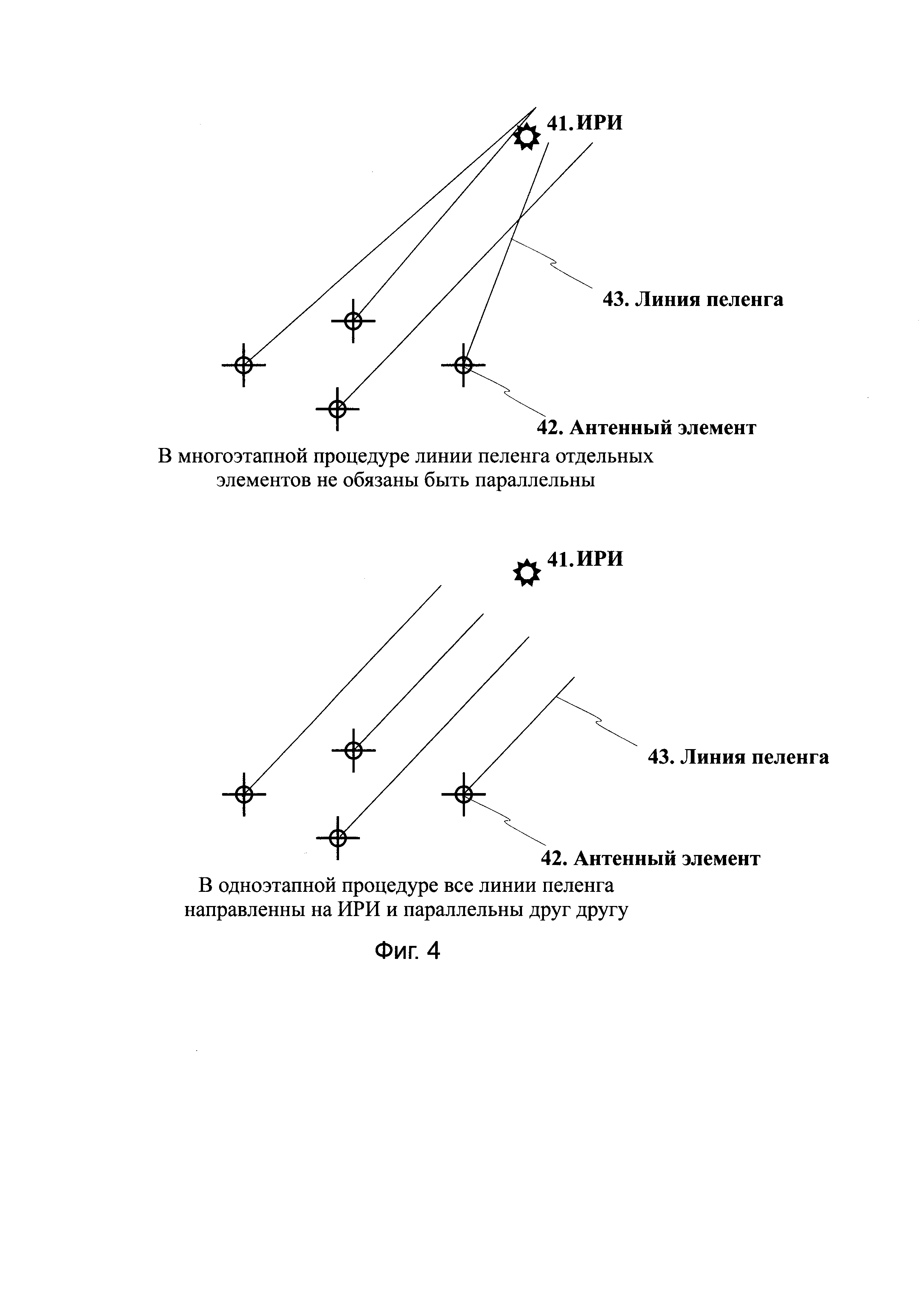
Для пояснения отличия одноэтапного метода от двухэтапного служит следующая схема, представленная на фиг. 4. При проведении многоэтапного оценивания на первом этапе будет оцениваться фазовый сдвиг в каждом из антенных элементов решетки (42) и вектор взаимных задержек между M точками приема Τ=(τ21, τ31, …, τΜ1, τ32, …, τΝ2, …, τΜ(M¬-1)) длины Μ(Μ-1)/2. На втором этапе проводится оценка направления пеленга (43) каждого из антенных элементов на ИРИ (41), на третьем этапе определяется общий пеленг всей системы путем среднеквадратического приближения, например, как в работе [12]. При этом каждая пара вибраторов будет формировать свое собственное направление; но в силу наличия неустранимых шумов все направления пеленгов не могут быть параллельны. При выполнении одноэтапного оценивания непосредственно ищется единственное для всей антенной решетки направление пеленга, которое определяется в результате решения задачи численной максимизации решающей функции (9). Таким образом, найденное решение будет удовлетворять всей совокупности наблюдаемых отсчетов спектра (4).
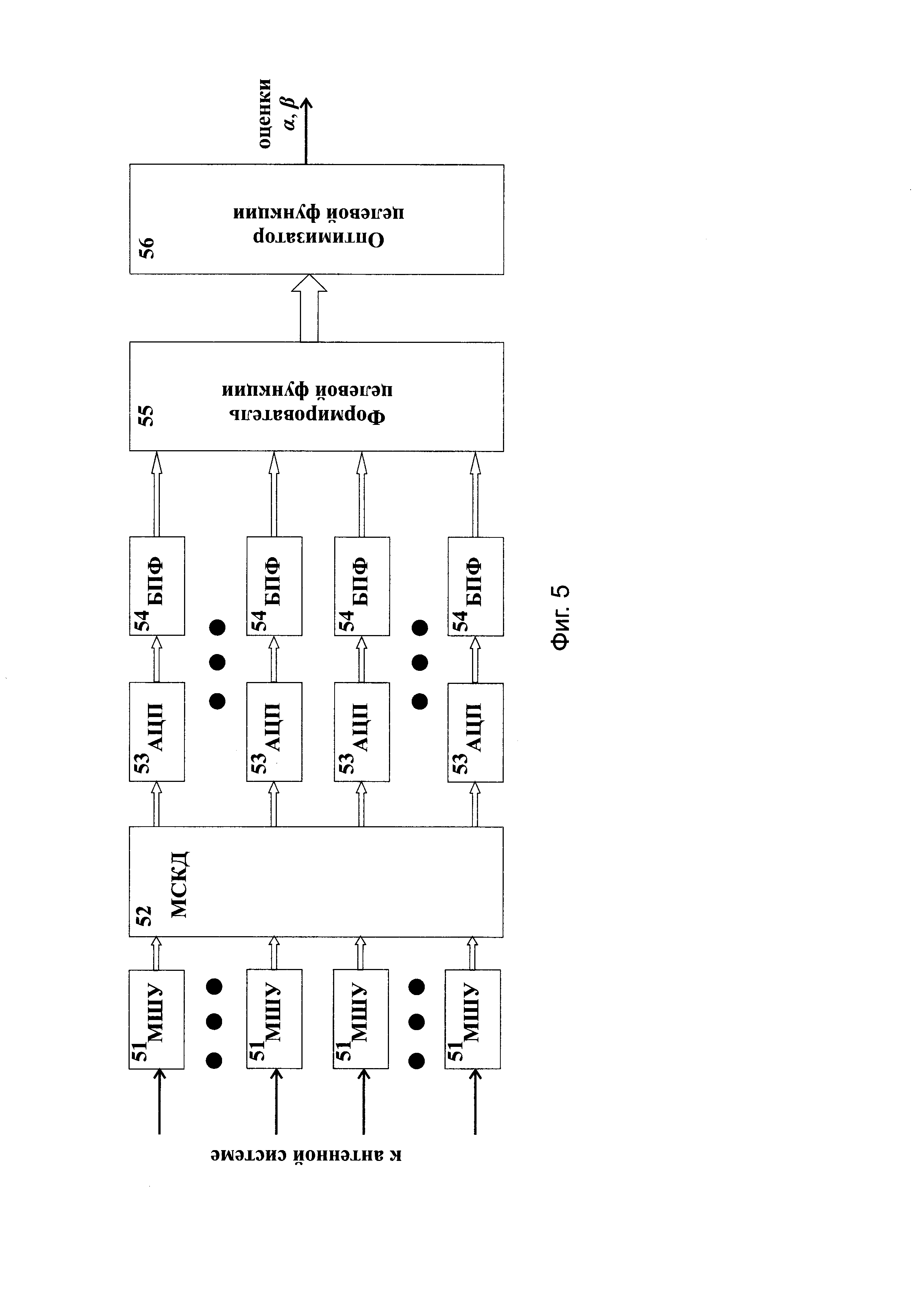
Структурная схема системы формирования оценки азимута α и угла места β представлена на фиг. 5. Для каждой из M точек приема, представляющих собой пары взаимно ортогональных вибраторов, ориентированных в горизонтальной плоскости, выделяется два отдельных канала: по одному на каждый вибратор. Малошумящие усилители (МШУ) (51) размещаются в каналах перед подачей сигналов на многоканальный синхронный квадратурный демодулятор (МСКД) (52), позволяющий выполнить одновременную многоканальную демодуляцию и сформировать квадратурные составляющие сигналов, поступающие на вход аналого-цифровых преобразователей (АЦП) (53), формирующих отсчеты цифрового сигнала
Вычисленные отсчеты спектров поступают в цифровой форме на блок формирователя решающей функции (55), реализованный на основе цифровой ЭВМ. Формирователь решающей функции создает в оперативной памяти цифровой ЭВМ специальный параметризированный программный объект, состоящий из полей, содержащих отсчеты спектров


Сформированный объект передается в блок оптимизатора решающей функции (56), выполняющий числовую максимизацию переданной в него решающей функции в диапазоне допустимых значений параметров азимута и угла места. Блок оптимизатора решающей функции реализуется посредством стандартных численных методов решения оптимизационных задач по поиску безусловного экстремума функций многих переменных. В качестве использованных методов численной оптимизации [13] можно выделить методы первого порядка на основе метода наискорейшего спуска, методы второго порядка на основе методов Ньютона, и метод Левенберга-Марквардта [14], объединяющий преимущества обеих групп методов и обладающий быстрой сходимостью.
В результате выполнения численного алгоритма оптимизации определяются оценки значений азимута и угла места, как значения оптимизационных переменных, доставляющие максимум решающей функции. Значения, рассчитанные с помощью численного оптимизационного алгоритма, принимаются выходными параметрами блока оптимизации и рассматриваются в качестве результирующих оценок направления на источник радиоизлучения, сформированных предлагаемых методом пеленгации.
Источники информации
1. Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: «Радио и связь», 1997.
2. Пат. 2283505, Способ и устройства определения координат источника радиоизлучения / Терентьев А.В., Соломатин А.И., Смирнов П.В., Царик О.В., Шепилов A.M., Шишков В.А.; патентообладатели: Терентьев А.В., Соломатин А.И., Смирнов П.В., Царик О.В., Шепилов A.M., Шишков В.А. - 2005102257/09; заявл. 31.01.2005; опубл. 10.09.2006, бюл. 25. - 30 с.
3. Пат. 2285934, Способ однопозиционного определения местоположения ДКМВ передатчиков / Ветроградов Г.Г., Ветроградов В.Г., Кондаков Е.В., Шевченко В.Н.; патентообладатель: ФГУП "ГКБ "Связь" - 2004118129/09; заявл. 15.06.2004; опубл. 20.10.2006, бюл. 29. - 11 с.
4. Пат. 2302646, Способ поиска декаметровых передатчиков / Ветроградов Г.Г., Ветроградов В.Г., Шевченко В.Н.; патентообладатель: ФГУП "ГКБ "Связь" - 2005131827/09; заявл. 30.10.2005; опубл. 10.07.2007, бюл. 19. - 11 с.
5. Пат. 2567850, Способ пеленгования воздушного объекта / Уфаев В.А.; патентообладатели: РФ (МО РФ), ФГКВОУ ВПО "ВУНЦ ВВС "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" - 2014125677/07; заявл. 24.06.2014; опубл. 10.11.2015, бюл. 31. - 13 с.
6. Brown, George. "US Patent 2086976". Antenna system. Retrieved 14 January 2014. filed: September 20, 1935; granted: July 13, 1937.
7. C.-Y. Chin and C.F. Jou, A Slim Horizontally Polarized Omnidirectional Antenna Based on Turnstile Slot Dipole Progress In Electromagnetics Research C, Vol.50, 75-85, 2014.
8. К.T. McDonald, Radiation of Turnstile Antennas Above a Conducting Ground Plane // Joseph Henry Laboratories, Princeton University, Princeton, USA, September 18, 2008.
9. Дубровин А.В., Сосулин Ю.Г. Одноэтапное оценивание местоположения источника радиоизлучения комбинированной пассивной системой // Радиотехника и электроника, 2007, т. 52, №4, с. 441-457.
10. P. Stoica, P. Babu, The Gaussian Data Assumption Leads to the Largest

11. Кондратьев B.C., А.Ф. Котов, Л.Н. Марков. Многопозиционные радиотехнические системы / под ред. проф. В.В. Цветнова. М.: Радио и связь, 1989 г. 264 с.
12. Torrieri D.J., Statistical Theory of Passive Location Systems // IEEE Transactions on Aerospace and Electronic Systems, 1984, vol. 20, no. 2, pp. 183-198.
13. J. Nocedal, S.J. Wright, Numerical Optimization, 2nd ed., Springer, New York, 2006, 664 pp.
14. K. Madsen, H.B. Nielsen, O. Tingleff, Methods for Non-Linear Least Squares Problems, 2nd Edition, April 2004, Informatics and Mathematical Modelling Technical University of Denmark.
Реферат
Изобретение относится к радиотехнике, а именно к методам пассивной радиолокации, состоящей в определении углов пеленга источника радиоизлучения (ИРИ) за счет приема электромагнитных волн, создаваемых ИРИ, пассивной распределенной в пространстве радиолокационной системой и их последующей цифровой обработки. Технический результат изобретения заключается в повышении точности оценки пеленга ИРИ и увеличении дальности работы пеленгаторов при любом типе поляризации электромагнитной волны. Указанный результат достигается за счет многоканального параллельного приема электрических сигналов, сформированных отдельными вибраторами взаимно ортогональных пар симметричных горизонтальных вибраторов, составляющих элементы фазированной антенной решетки пеленгатора, и последующей цифровой обработки принятых сигналов с использованием одноэтапной процедуры оценивания, состоящей в формировании решающей функции непосредственно зависящей от угла азимута и места и ее последующей максимизации. 5 ил.
Комментарии