Способ поляризационного пеленгования радиосигналов - RU2624449C1
Код документа: RU2624449C1
Чертежи
Описание
Изобретение относится к радиотехнике и может быть использовано в системах обнаружения и пеленгования источников радиоизлучения (ИРИ) в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Известен способ пеленгации радиосигналов по патенту RU №2262119 [1], заключающийся в приеме радиосигналов антенной системой, преобразовании радиосигналов многоканальным приемником с общим гетеродином для всех каналов, получении спектральных характеристик сигналов одновременно для каждого канала, выборе частотных поддиапазонов, занимаемых отдельными сигналами, определении взаимного и разностного спектра, получении суммы разностных спектров и вычислении азимута θ для каждого радиосигнала.
Недостатком аналога является относительно низкая точность измерения азимута θ на ИРИ. Это объясняется тем, что при измерении параметров радиосигнала не учитываются его поляризационные параметры. В то же время, если ИРИ и/или пеленгатор находятся над поверхностью Земли (в пространстве), пеленг необходимо описывать двумя углами - азимутом θ и углом места β, который в данном способе не учитывается, что приводит к снижению точности пеленгования.
Известен способ пеленгования многолучевых сигналов по патенту RU №2309422 [2], согласно которому выполняются следующие процедуры:
1. Принимают радиосигнал неизвестной поляризации многоэлементной антенной решеткой.
2. Формируют ансамбль радиосигналов xn(t), зависящих от времени t и номера n антенны,

3. Синхронно преобразуют ансамбль принятых радиосигналов xn(t) в цифровые сигналы xn(z), где z - номер временного отсчета сигнала.
4. Преобразуют цифровые сигналы xn(z) в сигнал комплексного амплитудно-фазового распределения (АФР)

5. Формируют идеальный сигнал комплексной фазирующей функции


где

6. Используя сигнал фазирующей функции




7. По максимуму модуля сигнала комплексного углового спектра

При таком способе устраняется неопределенность, связанная с отсутствием данных об угле места прихода электромагнитной волны, за счет чего уменьшается количество ошибок измерения азимута θ и угла места β на ИРИ.
Недостатком аналога является относительно низкая точность измерения азимута θ и угла места β на ИРИ. Это объясняется тем, что не обеспечивается согласование по поляризации между приемной антенной системой (АС) и приходящей электромагнитной волной.
Наиболее близким по своей технической сущности к заявленному способу поляризационного пеленгования радиосигналов является способ поляризационно-чувствительного пеленгования радиосигналов по патенту RU №2393498 [3] - далее способ прототип, согласно которому принимают радиосигнал неизвестной поляризации многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента, синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы, из цифровых сигналов получают сигнал комплексного АФР







Предварительно до начала приема радиосигнала формируют и запоминают для всех возможных частот приема и требуемых узлов сетки наведения по азимутам θm и углам места βm поляризационно-зависимые идеальные сигналы



В способе-прототипе компенсируется ошибка измерения азимута θ и угла места β на ИРИ, связанная с отсутствием согласования по поляризации между приемной АС и полем приходящей электромагнитной волны, за счет использования многоэлементной антенной системы, состоящей из антенных элементов, имеющих существенное различие поляризационных откликов, а также за счет сканирования по пространственным и поляризационным параметрам.
Недостатками способа-прототипа являются относительно низкая точность измерения азимута θ и угла места β на ИРИ в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы, а также значительные временные затраты при измерении азимута и угла места на ИРИ, вызванные операциями сканирования по пространственным и поляризационным параметрам.
Целью изобретения является повышение точности пеленгования в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Поставленная цель достигается тем, что в известном способе поляризационного пеленгования, заключающемся в том, что принимают аналоговый радиосигнал неизвестной поляризации многоэлементной антенной системой (MAC) и формируют совокупность аналоговых радиосигналов, поляризация которых в общем случае является эллиптической, зависящих от времени и номера антенного элемента MAC, на который они приняты, синхронно преобразуют совокупность принятых аналоговых радиосигналов в цифровые сигналы, которые затем преобразуют в комплексное амплитудно-фазовое распределение (КАФР), описывающее распределение амплитуд и фаз принятого радиосигнала на элементах MAC, запоминают преобразованное КАФР, после чего рассчитывают азимут θ и угол места β на источник радиоизлучения. В качестве MAC используют триортогональную антенную систему (ТОАС), а для расчета углов θ и β предварительно в моменты времени t1 и t2 измеряют с помощью ТОАС ортогональные компоненты Еx1, Еy1, Ez1 и Еx2, Еy2, Еz2 векторов напряженности электрического поля E1 и Е2 принятого аналогового радиосигнала. Ориентацию векторов E1 и Е2 в пространстве определяют путем векторного сложения соответствующих им измеренных ортогональных компонент Еx1, Еy1, Еz1 и Еx2, Еy2, Еz2. Запоминают ориентацию векторов E1 и Е2 принятого аналогового радиосигнала в моменты времени t1 и t2, после чего измеряют значения азимута θ и угла места β, определяемые ориентацией линии пересечения плоскостей Ω1 и Ω2, проходящих через центр ТОАС и к которым перпендикулярны соответствующие векторы E1 и Е2.
Благодаря указанной новой совокупности существенных признаков при реализации заявленного способа обеспечивается согласование по поляризации между приемной АС и полем приходящей электромагнитной волны, что исключает возникновение дополнительных ошибок в измерении значений азимута θ и угла места β, следовательно, указывает на возможность повышения точности пеленгования в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Определение ориентации вектора напряженности электрического поля в пространстве позволяет исключить операции сканирования по пространственным и поляризационным параметрам, что сокращает временные затраты при измерении азимута и угла места на ИРИ.
Заявленное изобретение поясняется чертежами, на которых:
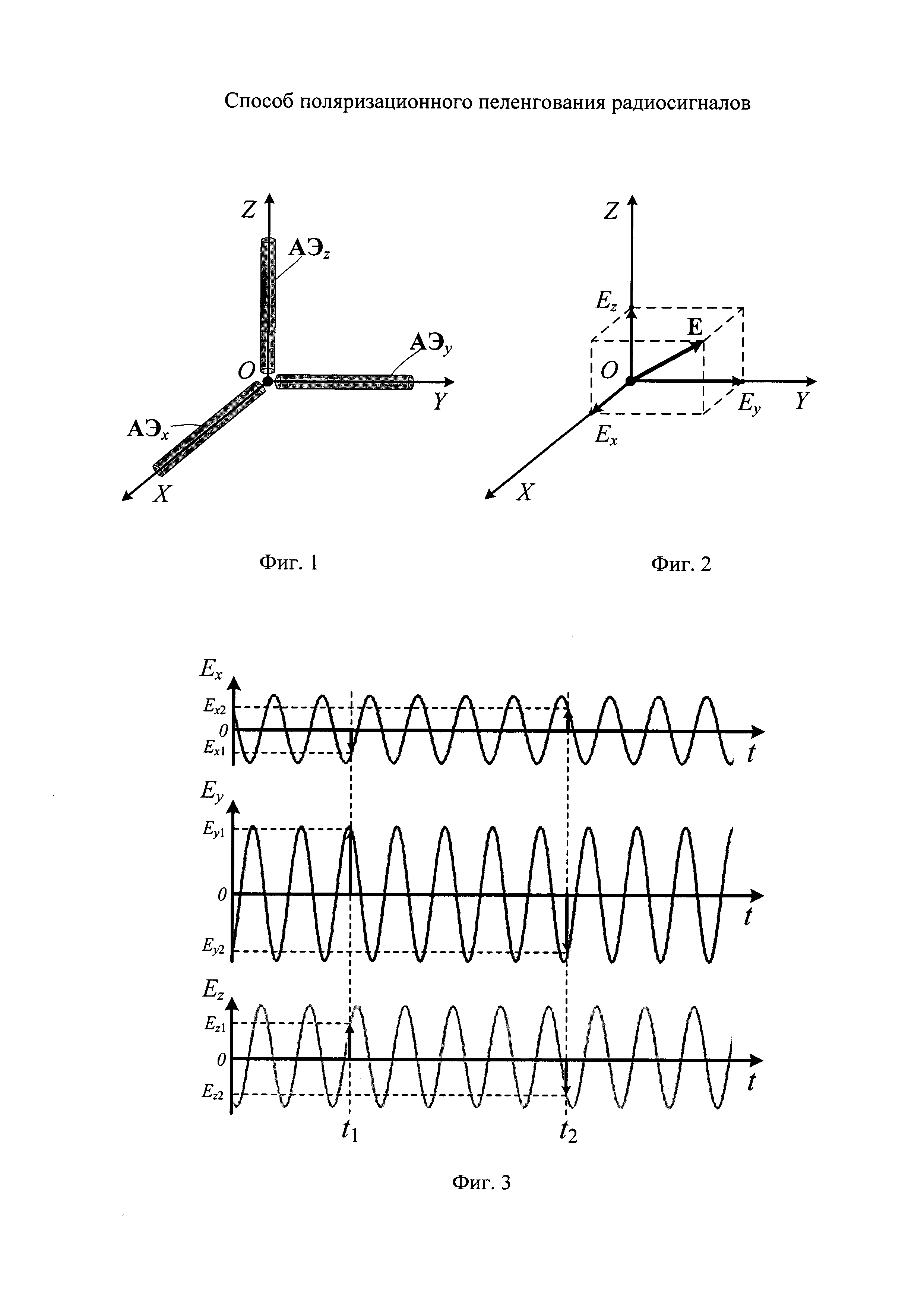
на фиг. 1 - конфигурация ТОАС в декартовой системе координат (ДСК);
на фиг. 2 - ортогональные компоненты Еx, Еy, Еz вектора напряженности электрического поля Е в ДСК OXYZ;
на фиг. 3 - временные диаграммы аналоговых сигналов, принятых на АЭx, АЭy, AЭz ТОАС, и значения этих сигналов, измеренных в моменты времени t1 и t2;
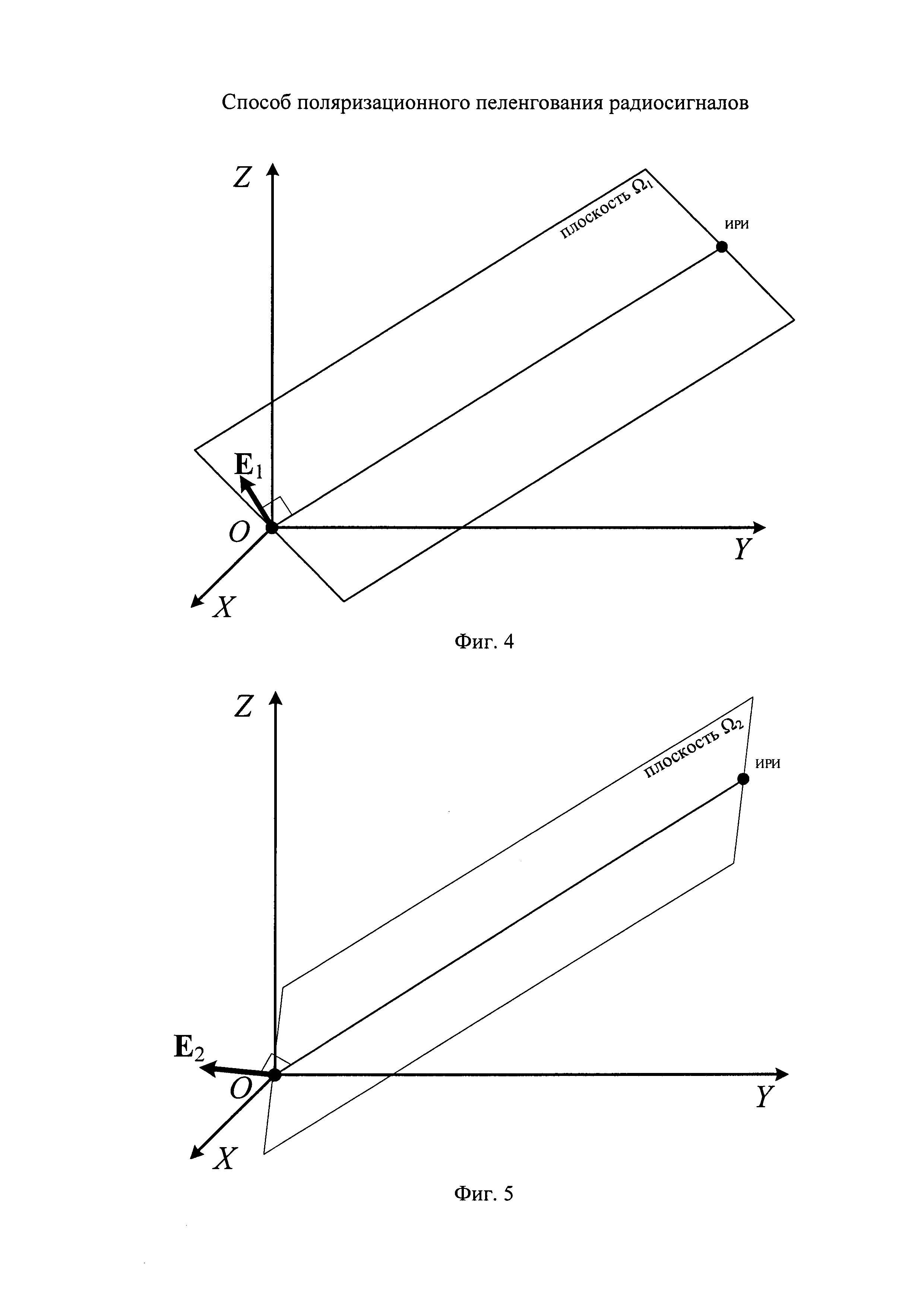
на фиг. 4 - графическое представление плоскости Ω1 в ДСК OXYZ;
на фиг. 5 - графическое представление плоскости Ω2 в ДСК OXYZ;
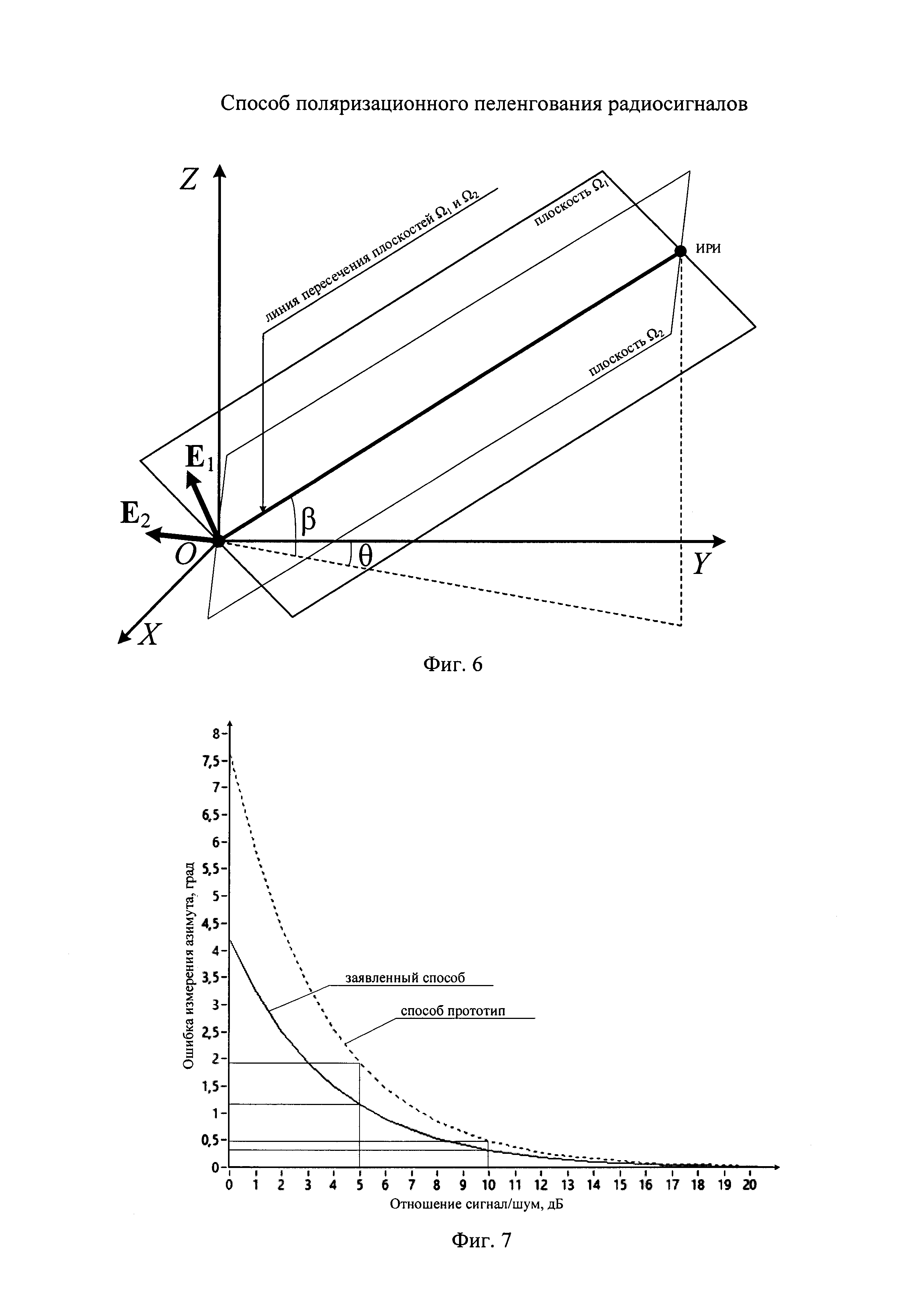
на фиг. 6 - графическое представление линии пересечения плоскостей Ω1 и Ω2 в ДСК OXYZ;
на фиг. 7 - результаты оценки эффективности заявленного способа при измерении угла азимута;
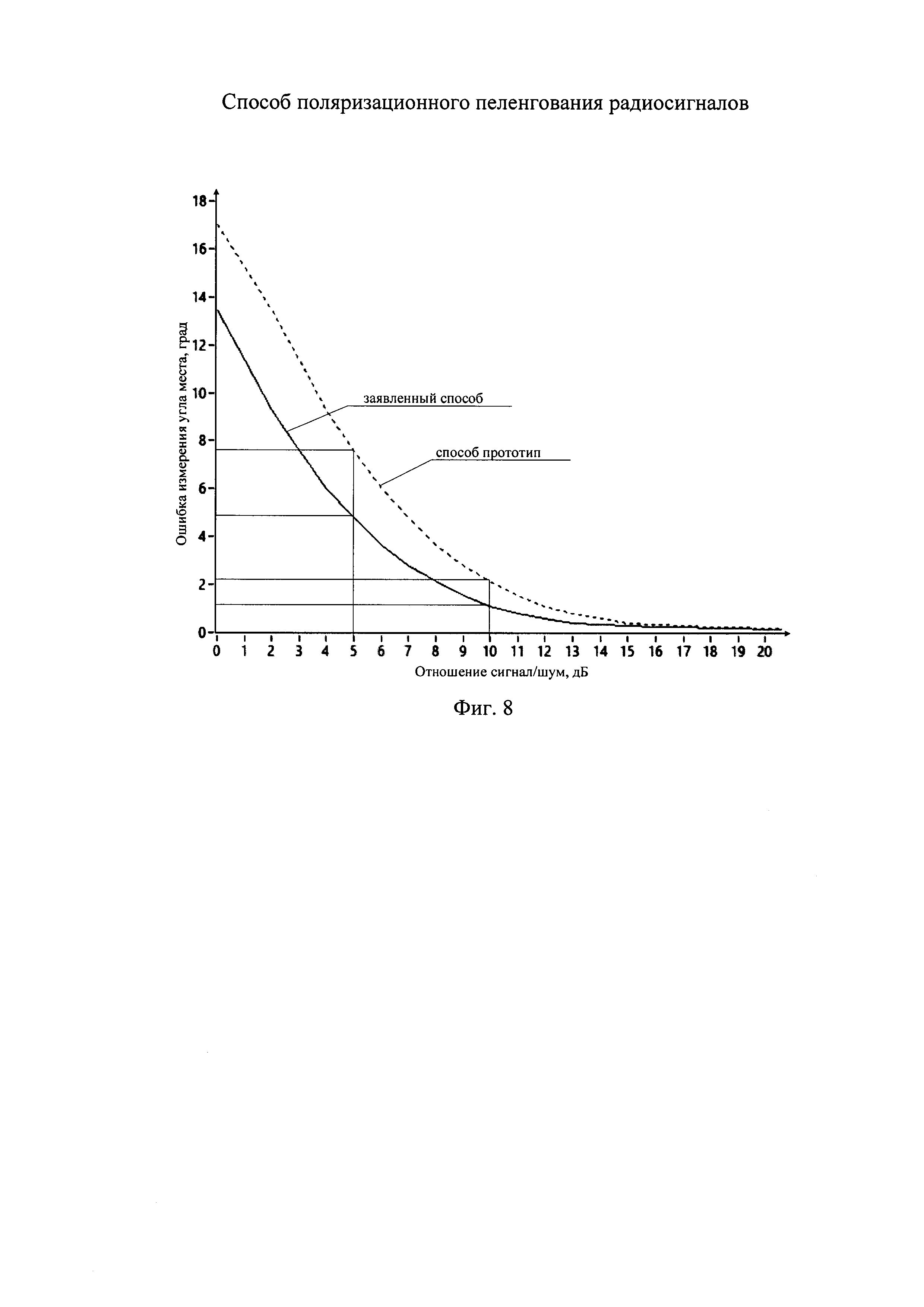
на фиг. 8 - результаты оценки эффективности заявленного способа при измерении угла места.
Традиционно физической основой любого способа пеленгования радиосигналов принято считать различие времени прихода радиоволны в разнесенные точки пространства. При этом точность пеленгования радиосигналов неизвестной поляризации классическими способами, ориентированными на обработку электромагнитного поля определенной поляризации, дает значительные погрешности пеленгования, если поляризационные характеристики пеленгаторной антенной системы не согласованы с поляризацией падающих волн. Повышение точности пеленгования в большинстве случаев достигается увеличением базы пеленгаторной антенной системы, то есть разнесением в пространстве антенных элементов пеленгаторной антенной системы [4].
Однако существует возможность определения направления на ИРИ с помощью сосредоточенной антенной системы, способной определить поляризацию радиосигнала в точке приема.
Поляризация электромагнитной волны является ее пространственно-временной характеристикой и определяется видом траектории, описываемой концом вектора электрического Е (или магнитного Н) поля в фиксированной точке пространства [5, 6].
Для измерения ортогональных компонент векторов напряженностей электрического поля E1 и Е2 используется сосредоточенная ТОАС, состоящая из трех антенных элементов (АЭ) АЭx, АЭy, АЭz [6, 7].
Используется декартовая система координат OXYZ, в которой центр координат О совмещен с центром ТОАС, оси OX, OY и OZ направлены по ортогональным АЭx, АЭy, АЭz соответственно (фиг. 1).
Векторная сумма напряженностей электрического поля Еx, Еy и Еz, измеренных на АЭx, АЭy и АЭz ТОАС, соответственно в произвольный момент времени будет составлять вектор напряженности электрического поля Е (фиг. 2).
На фиг. 3 представлены диаграммы аналоговых сигналов Еx, Еy и Еz, принятого в общем случае эллиптически поляризованного аналогового радиосигнала на АЭx, АЭy и АЭz ТОАС соответственно. В моменты времени t1 и t2 измеряют и запоминают значения этих аналоговых сигналов Еx1, Еy1, Еz1 и Еx2, Еy2, Еy2 с помощью АЭx, АЭy и АЭz ТОАС соответственно.
Путем векторного сложения ортогональных компонент Еx1, Еy1, Еz1 и Еx2, Еy2, Еz2 определяют ориентацию векторов E1 и E2 в пространстве и запоминают их.
Плоскость Ω1 ортогональна вектору напряженности электрического поля E1, проходит через центр ТОАС совмещенный с началом ДСК OXYZ (фиг. 4) и описывается уравнением:
Еx1x+Ey1y+Ez1z=0.
Плоскость Ω2 ортогональна вектору напряженности электрического поля Е2, проходит через центр ТОАС совмещенный с началом ДСК OXYZ (фиг. 5), и описывается уравнением
Ex2x+Ey2y+Ez2z=0.
Для измерения значений азимута θ и угла места β определяют линию пересечения плоскостей Ω1 и Ω2, которая задается системой уравнений [8]:
По линии пересечения плоскостей измеряют значения азимута θ и угла места β на ИРИ (фиг. 6).
Для проверки возможности достижения сформулированного технического результата было проведено компьютерное моделирование.
Методика проверки точности пеленгования в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех заключалась в следующем.
Исходными данными является эллиптически поляризованное радиоизлучение на входе АС пеленгатора при различных параметрах сигнала и взаимном расположении пеленгатора и ИРИ, которое формировалось с помощью программы моделирования произвольно поляризованного радиоизлучения на основе математического аппарата кватернионов [9].
Оценка точности измерения значений азимута θ и угла места β на ИРИ в зависимости от отношения сигнал/шум (ОСШ) выполнялась заявленным способом и способом-прототипом.
На фиг. 7 представлены результаты оценки эффективности заявленного способа при измерении азимута 0 на ИРИ, в зависимости от ОСШ. Например, при ОСШ 10 дБ ошибка измерения азимута 0 на ИРИ способом-прототипом составляет 0,5°, а заявленным способом 0,3°. При ОСШ 5 дБ ошибка измерения азимута θ на ИРИ способом-прототипом составляет 1,9°, а заявленным способом 1,2°.
На фиг. 8 представлены результаты оценки эффективности заявленного способа при измерении угла места β на ИРИ, в зависимости от ОСШ. Например, при ОСШ 10 дБ ошибка измерения угла места β на ИРИ способом-прототипом составляет 2,2°, а заявленным способом 1,2°. При ОСШ 5 дБ ошибка измерения угла места β на ИРИ способом-прототипом составляет 7,5°, а заявленным способом 4,9°.
Таким образом, предлагаемый способ позволяет повысить точность измерения азимута θ и угла места β на ИРИ в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Результаты сравнения точностных характеристик заявленного способа и способа-прототипа (рис. 8 и 9) свидетельствуют о снижении ошибки пеленгования как по азимуту, так и по углу места в 1,5-2 раза в зависимости от ОСШ.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент №2262119 (Россия). Способ пеленгации радиосигналов / М.Л. Артемов, О.В. Афанасьев, И.С. Дмитриев, Е.А. Москалева. - 2006.
2. Патент №2309422 (Россия). Способ пеленгования многолучевых сигналов В.Н. Шевченко, Н.М. Иванов, Ю.А. Звездина. - 2007.
3. Патент 2393498 (Россия). Способ поляризационно-чувствительного пеленгования радиосигналов (Варианты) / В.Н. Шевченко, Н.М. Иванов, Е.А. Шевченко - 2010.
4. Дворников С.В., Саяпин В.Н., Симонов А.Н. Теоретические основы координатометрии источников радиоизлучений. Учебное пособие. -СПб.: ВАС, 2007. - 80 с.
5. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
6. Комарович В.Ф., Никитченко В.В. Методы пространственной обработки радиосигналов. - Л.: ВАС, 1989. - 278 с.
7. Патент 2268520 (Россия). Антенна / С.В. Землянский, Е.Н. Мищенко, С.Е. Мищенко, В.В. Шацкий. - 2006.
8. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1973. - 832 с.
9. Богдановский С.В., Симонов А.Н., Теслевич С.Ф., Медведев М.В. Программа моделирования произвольно поляризованного радиоизлучения на основе математического аппарата кватернионов. Свидетельство о государственной регистрации программ для ЭВМ в ФИПС (Роспатент) №2015661417 от 22.10.2015. Бюл. №11.
Реферат
Изобретение относится к радиотехнике и может быть использовано в системах обнаружения и пеленгования сигналов источников радиоизлучения. Достигаемый технический результат - повышение точности пеленгования в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы. Способ основан на измерении ортогональных компонент Е, Е, Eи Е, Е, Евекторов напряженности электрического поля Eи Епринятого аналогового в общем случае эллиптически поляризованного радиосигнала в моменты времени tи tс помощью триортогональной антенной системы, определении ориентации векторов Eи Ев пространстве и измерении значения азимута θ и угла места β, определяемых ориентацией линии пересечения плоскостей Ωи Ω, проходящих через центр триортогональной антенной системы и к которым перпендикулярны соответствующие векторы Eи Е. 8 ил.
Комментарии