Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата - RU2610150C1
Код документа: RU2610150C1
Чертежи
Описание
Изобретение относится к радиотехнике и может быть использовано для определения координат наземных источников радиоизлучения (ИРИ) при радиопеленговании с борта летательного аппарата (ЛА).
Задача определения координат наземных источников электромагнитного излучения в радиочастотном диапазоне является важной составляющей радиомониторинга. Достоинством радиопеленгования в системе местоопределения ИРИ является скрытность при определении координат ИРИ вследствие отсутствия необходимости генерации и излучения зондирующих радиосигналов из точки радиомониторинга. Размещение радиопеленгационных средств на ЛА, и в том числе на беспилотных летательных аппаратах [1. Василии Н.Я. Беспилотные летательные аппараты. - Мн.: ООО «Попури», 2003.], позволяет существенно расширить зону радиомониторинга и осуществлять превентивное обнаружение и определение координат ИРИ, находящихся на поверхности Земли. При этом ввиду ограничений на массо-габаритные характеристики радиопеленгационных средств, размещаемых на ЛА, в качестве бортовых пеленгаторных антенн (БПА) в абсолютном большинстве практически важных случаев используются плоские антенные решетки, обеспечивающие возможность радиопеленгования с требуемым качеством в одной (азимутальной) плоскости [2. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио. 1964. - 640 с.].
Известны способ и устройство определения координат наземного ИРИ [3. Патент Российской Федерации №2419106, МПК G01S 13/46, опубл. 20.06.2011], в котором на ЛА размещена бортовая пеленгаторная антенна, приемоиндикатор, обеспечивающий измерение радиопеленга с использованием бортовой пеленгаторной антенны, измеритель угловой ориентации ЛА, измеритель местоположения ЛА, преобразователь угловых координат линии радиопеленга в координаты наземного ИРИ.
Однако точность определения координат наземного ИРИ при использовании известного способа бортовыми средствами ЛА низкая. Это объясняется тем, что возникает ошибка определения координат, связанная со случайными флуктуациями пространственного положения азимутальной плоскости бортовой пеленгаторной антенны во время полета ЛА, причем величина этой ошибки соизмерима с систематическими и эксплуатационными ошибками бортового радиопеленгатора.
Известен способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата [4. Патент Российской Федерации №2510618, МПК G01S 1/08, опубл. 10.04.2014], включающий радиоприем радиосигналов бортовой пеленгаторной антенной, частотную селекцию радиосигналов, определение линий радиопеленгов в азимутальной плоскости бортовой пеленгаторной антенны, регистрацию полученных данных периодически отсчетами, формирование по результатам регистрации полученных данных и с использованием соответствующей отсчетам априорно известной текущей информации о координатах фазового центра бортовой пеленгаторной антенны и угловой ориентации продольной, поперечной и нормальной осевых линий бортовой пеленгаторной антенны в нормальной земной прямоугольной системе координат не менее двух полуплоскостей положения наземного источника радиоизлучения, ортогональных азимутальной плоскости бортовой пеленгаторной антенны, проходящих через каждую полученную линию радиопеленга и ограниченных нормальной осевой линией бортовой пеленгаторной антенны, определение линий положения наземного источника радиоизлучения как линий пересечения каждой полуплоскости положения наземного источника радиоизлучения с поверхностью Земли, усреднение полученных данных в случае, если сформировано более двух вышеупомянутых полуплоскостей положения наземного источника радиоизлучения и текущее значение полученных данных отличается от ранее полученного среднего значения на величину, не превышающую заданное априорно известное значение, и определение координат наземного источника радиоизлучения как точки пересечения линий положения наземного источника радиоизлучения.
Недостатками известного способа определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата являются низкая точность определения координат наземных источников радиоизлучения и большие вычислительные затраты при радиопеленговании с борта летательного аппарата, которые обусловлены следующими факторами.
Во-первых, линии положения наземного источника радиоизлучения определяются как линии пересечения каждой полуплоскости положения наземного источника радиоизлучения с поверхностью Земли, что при отклонении поверхности Земли от плоскости, изрезанности рельефа земной поверхности в зоне радиопеленгования и заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли приводит к погрешностям определения линий положения и высоким вычислительным затратам при их определении.
Во-вторых, определение координат наземного источника радиоизлучения осуществляется путем определения координат точки пересечения пар вышеупомянутых линий положения наземного источника радиоизлучения, что при наличии вышеупомянутых погрешностей линий положения, отклонении поверхности Земли от плоскости, изрезанности рельефа земной поверхности в зоне радиопеленгации и заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли приводит к погрешностям определения координат наземного источника радиоизлучения и высоким вычислительным затратам при их определении.
В-третьих, при осуществлении процедуры усреднения данных не учитываются зависимости точности единичных оценок координат наземного ИРИ от углов между парами полуплоскостей положения наземного источника радиоизлучения, углов между линиями пересечения пар полуплоскостей положения наземного источника радиоизлучения и поверхностью Земли и углов между каждой из полуплоскостей пары полуплоскостей положения наземного источника радиоизлучения и местной вертикалью поверхности Земли, а также - от углов возвышения и углов места наземного источника радиоизлучения, что приводит к погрешностям процедуры усреднения данных, и, соответственно, к снижению точности определения координат при многократном радиопеленговании с разных точек траектории движения ЛА.
Наиболее близким по технической сущности к заявляемому способу определения координат наземного источника радиоизлучения с борта летательного аппарата и принятым за прототип является способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата [5. Патент Российской Федерации №2432580, МПК G01S 1/08, опубл. 27.10.2011], включающем радиоприем радиосигналов бортовой пеленгаторной антенной, частотную селекцию радиосигналов, определение линий радиопеленгов в азимутальной плоскости бортовой пеленгаторной антенны, регистрацию полученных данных периодически отсчетами, формирование по результатам регистрации полученных данных и с использованием соответствующей отсчетам априорно известной текущей информации о координатах фазового центра бортовой пеленгаторной антенны и угловой ориентации продольной, поперечной и нормальной осевых линий бортовой пеленгаторной антенны в нормальной земной прямоугольной системе координат не менее одной независимой пары пересекающихся полуплоскостей положения наземного источника радиоизлучения, ортогональных азимутальной плоскости бортовой пеленгаторной антенны, проходящих через каждую полученную линию радиопеленга и ограниченных нормальной осевой линией бортовой пеленгаторной антенны, определение пересекающихся линий положения наземного источника радиоизлучения как линий пересечения каждой полуплоскости положения наземного источника радиоизлучения с поверхностью Земли, причем при формировании двух и более независимых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, и, соответственно, при определении двух и более независимых пар пересекающихся линий положения наземного источника радиоизлучения, выбирают пары независимых отсчетов данных, соответствующие наименьшим расстояниям от фазового центра бортовой пеленгаторной антенны до наземного источника радиоизлучения и значениям модулей разностей между парами радиопеленгов, наиболее близким к 90 градусам, весовую обработку полученных данных в случае, если сформировано две и более независимые пары пересекающихся полуплоскостей положения наземного источника радиоизлучения, которая зависит от значений радиопеленгов, соответствующих парам независимых отсчетов данных, и увеличивает веса пар независимых отсчетов данных, соответствующих наименьшим расстояниям от фазового центра бортовой пеленгаторной антенны до наземного источника радиоизлучения и значениям модулей разностей между парами радиопеленгов, наиболее близким к 90 градусам, и определение координат наземного источника радиоизлучения как точки пересечения линий положения наземного источника радиоизлучения.
Недостатками ближайшего аналога способа определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата являются низкая точность определения координат наземных источников радиоизлучения и большие вычислительные затраты при радиопеленговании с борта летательного аппарата, которые обусловлены следующими факторами.
Во-первых, линии положения наземного источника радиоизлучения определяются как линии пересечения каждой полуплоскости положения наземного источника радиоизлучения с поверхностью Земли, что при отклонении поверхности Земли от плоскости, изрезанности рельефа земной поверхности в зоне радиопеленгования и заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли приводит к погрешностям определения линий положения и высоким вычислительным затратам при их определении.
Во-вторых, определение координат наземного источника радиоизлучения осуществляется путем определения координат точки пересечения пар вышеупомянутых пересекающихся линий положения наземного источника радиоизлучения, что при наличии вышеупомянутых погрешностей пересекающихся линий положения, отклонении поверхности Земли от плоскости, изрезанности рельефа земной поверхности в зоне радиопеленгации и заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли приводит к погрешностям определения координат наземного источника радиоизлучения и высоким вычислительным затратам при их определении.
В-третьих, при формировании двух и более независимых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, соответствующих наименьшим значениям дисперсий круговых (радиальных) ошибок единичных оценок координат наземного ИРИ, не учитывают зависимости значений дисперсий круговых (радиальных) ошибок единичных оценок координат наземного ИРИ от углов между парами пересекающихся полуплоскостей положения наземного источника радиоизлучения, углов между линиями пересечения пар пересекающихся полуплоскостей положения наземного источника радиоизлучения и поверхностью Земли и углов между каждой из полуплоскостей пары пересекающихся полуплоскостей положения наземного источника радиоизлучения и местной вертикалью поверхности Земли, а также - от углов возвышения и углов места наземного источника радиоизлучения, что приводит к формированию независимых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, не соответствующих наименьшим значениям дисперсий круговых (радиальных) ошибок единичных оценок координат наземного ИРИ, и, соответственно, к снижению точности определения координат при многократном радиопеленговании с разных точек траектории движения ЛА.
В-четвертых, в случае определения двух и более пересекающихся линий положения наземного источника радиоизлучения при проведении весовой обработки полученных данных при определении весов отсчетов, выбираемых обратно пропорциональными значениям дисперсий составляющих линейных ошибок единичных оценок координат наземного ИРИ по осям абсцисс и ординат нормальной земной системы координат, не учитывают зависимости значений дисперсий составляющих линейных ошибок единичных оценок координат наземного ИРИ по осям абсцисс и ординат нормальной земной системы координат от углов между парами пересекающихся полуплоскостей положения наземного источника радиоизлучения, углов между линиями пересечения пар пересекающихся полуплоскостей положения наземного источника радиоизлучения и поверхностью Земли и углов между каждой из полуплоскостей пары пересекающихся полуплоскостей положения наземного источника радиоизлучения и местной вертикалью поверхности Земли, а также - от углов возвышения и углов места наземного источника радиоизлучения, что приводит к определению весов отсчетов, значения которых не соответствуют обратно пропорциональными значениям дисперсий составляющих линейных ошибок единичных оценок координат наземного ИРИ по осям абсцисс и ординат нормальной земной системы координат, и, соответственно, к снижению точности определения координат при многократном радиопеленговании с разных точек траектории движения ЛА.
Указанные недостатки приводят к снижению качества определения координат наземных источников радиоизлучения при радиопеленговании с борта летательного аппарата и ограничению области применения радиопеленгационных средств, размещаемых на ЛА.
Решаемая изобретением задача - повышение качества определения координат наземных источников радиоизлучения при радиопеленговании с борта летательного аппарата и расширение области применения радиопеленгационных средств, размещаемых на ЛА.
Поставленная задача решается за счет достижения технического результата, заключающегося в повышении точности определения координат наземных источников радиоизлучения и снижении вычислительных затрат при радиопеленговании с борта летательного аппарата.
Данный технический результат достигается тем, что в известном способе определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, включающем радиоприем радиосигналов бортовой пеленгаторной антенной, частотную селекцию радиосигналов, определение линий радиопеленгов в азимутальной плоскости бортовой пеленгаторной антенны, регистрацию полученных данных периодически отсчетами, формирование по результатам регистрации полученных данных и с использованием соответствующей отсчетам априорно известной текущей информации о координатах фазового центра бортовой пеленгаторной антенны и угловой ориентации продольной, поперечной и нормальной осевых линий бортовой пеленгаторной антенны в нормальной земной прямоугольной системе координат не менее одной независимой пары пересекающихся полуплоскостей положения наземного источника радиоизлучения, ортогональных азимутальной плоскости бортовой пеленгаторной антенны, проходящих через каждую полученную линию радиопеленга и ограниченных нормальной осевой линией бортовой пеленгаторной антенны, причем при формировании двух и более независимых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения выбирают пары независимых отсчетов данных, соответствующих наименьшим расстояниям от фазового центра бортовой пеленгаторной антенны до наземного источника радиоизлучения, и проводят весовую обработку выбранных пар независимых отсчетов данных, которая зависит от значений радиопеленгов, соответствующих выбранным парам независимых отсчетов данных, и увеличивает веса выбранных пар независимых отсчетов данных, соответствующих наименьшим расстояниям от фазового центра бортовой пеленгаторной антенны до наземного источника радиоизлучения,
согласно изобретению, введены операции формирования нормалей к полуплоскостям положения наземного источника радиоизлучения, определения не менее одной линии положения наземного источника радиоизлучения как линии пересечения независимой пары пересекающихся полуплоскостей положения наземного источника радиоизлучения, параметры которой определяют из условия ортогональности к нормалям независимой пары пересекающихся полуплоскостей положения наземного источника радиоизлучения, и определения координат наземного источника радиоизлучения как точки пересечения линии положения наземного источника радиоизлучения с поверхностью Земли, причем в случае определения двух и более линий положения, соответствующих двум и более независимым парам пересекающихся полуплоскостей положения наземного источника радиоизлучения, выбирают пары независимых отсчетов данных, дополнительно соответствующих независимым парам пересекающихся полуплоскостей положения наземного источника радиоизлучения, наиболее близким к взаимно ортогональным полуплоскостям и обеспечивающим углы пересечения линий положения наземного источника радиоизлучения с поверхностью Земли, наиболее близкие к нормали к поверхности Земли в зоне радиопеленгования, при которых нормали к соответствующим независимым парам пересекающихся полуплоскостей положения наземного источника радиоизлучения расположены в плоскостях, наиболее близких к горизонтальной плоскости, и, наконец, при которых соответствующие пары модулей углов возвышения наземного источника радиоизлучения наиболее близки к максимальным значениям, а соответствующие пары модулей углов места наземного источника радиоизлучения наиболее близки к минимальным значениям, причем при проведении весовой обработки выбранных пар независимых отсчетов данных дополнительно увеличивают веса выбранных пар независимых отсчетов данных, при которых соответствующие независимые пары пересекающихся полуплоскостей положения наземного источника радиоизлучения наиболее близки к взаимно ортогональным полуплоскостям и обеспечивают углы пересечения линий положения наземного источника радиоизлучения с поверхностью Земли, наиболее близкие к нормали к поверхности Земли в зоне радиопеленгования, при которых нормали к соответствующим независимым парам пересекающихся полуплоскостей положения наземного источника радиоизлучения расположены в плоскостях, наиболее близких к горизонтальной плоскости, и, наконец, при которых соответствующие пары модулей углов возвышения наземного источника радиоизлучения наиболее близки к максимальным значениям, а соответствующие пары модулей углов места наземного источника радиоизлучения наиболее близки к минимальным значениям.
При этом в заявляемом способе определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата точку пересечения линии положения наземного источника радиоизлучения с поверхностью Земли определяют с использованием итерационной процедуры ее поиска, причем шаг сходимости итерационной процедуры и минимальное число шагов итерационной процедуры выбирают зависящими от изрезанности рельефа поверхности Земли в зоне радиопеленгования, априорно известной заданной точности определения координат наземного источника радиоизлучения и угла между линией положения наземного источника радиоизлучения и местной вертикалью поверхности Земли.
Решение поставленной задачи с достижением технического результата обусловлено следующим.
В предложенном способе определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, в отличие от известного:
во-первых, линии положения наземного источника радиоизлучения определяются в аналитическом виде как линии пересечения соответствующих пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, параметры которых определяются из условия ортогональности к нормалям вышеупомянутых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, и, вследствие этого, не зависят от параметров поверхности Земли, за счет чего повышается точность их определения при одновременном снижении вычислительных затрат;
во-вторых, определение координат наземного источника радиоизлучения осуществляется путем определения координат точки пересечения линии положения наземного источника радиоизлучения, параметры которой заданы в аналитическом виде, с поверхностью Земли, что при заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли позволяет повысить точность определения координат наземного источника радиоизлучения при одновременном снижении вычислительных затрат;
в-третьих, при формировании двух и более независимых пар пересекающихся полуплоскостей положения наземного источника радиоизлучения выбирают пары независимых отсчетов данных, которые дополнительно соответствуют не значениям модуля разности между парой радиопеленгов, наиболее близким к 90 градусам, а дополнительно соответствуют независимым парам пересекающихся полуплоскостей положения наземного источника радиоизлучения, наиболее близким к взаимно ортогональным полуплоскостям, обеспечивающим углы пересечения линий положения наземного источника радиоизлучения с поверхностью Земли, наиболее близкие к нормали к поверхности Земли в зоне радиопеленгования, имеющим нормали, расположенные в плоскостях, наиболее близких к горизонтальной плоскости, и при которых модули углов возвышения наземного источника радиоизлучения характеризуются максимальными значениями, а модули углов места наземного источника радиоизлучения характеризуются минимальными значениями, что позволяет из общего числа несовпадающих пар пересекающихся полуплоскостей положения наземного ИРИ выбрать совокупность независимых пар пересекающихся полуплоскостей положения наземного ИРИ, для которых дисперсии круговых (радиальных) ошибок единичных оценок координат наземного ИРИ имеют минимальные значения, и за счет этого повысить точность определения координат при многократном радиопеленговании с разных точек траектории движения ЛА;
в-четвертых, в случае определения двух и более линий положения наземного источника радиоизлучения при проведении весовой обработки полученных данных дополнительно увеличивают не веса отсчетов, соответствующих значениям модуля разности между парой радиопеленгов, наиболее близким к 90 градусам, а веса отсчетов, при которых соответствующие независимые пары пересекающихся полуплоскостей положения наземного источника радиоизлучения наиболее близки к взаимно ортогональным полуплоскостям и обеспечивают углы пересечения линий положения наземного источника радиоизлучения с поверхностью Земли, наиболее близкие к нормали к поверхности Земли в зоне радиопеленгования, при которых нормали к парам пересекающихся полуплоскостей положения наземного источника радиоизлучения расположены в плоскостях, наиболее близких к горизонтальной плоскости, и, наконец, при которых соответствующие независимым парам отсчетов модули углов возвышения наземного источника радиоизлучения характеризуются максимальными значениями, а модули углов места наземного источника радиоизлучения характеризуются минимальными значениями, что за счет увеличения вклада отсчетов, характеризуемых меньшими значениями дисперсий составляющих линейных ошибок единичных оценок координат наземного ИРИ по осям абсцисс и ординат нормальной земной системы координат, позволяет повысить точность определения координат наземного ИРИ при многократном радиопеленговании с разных точек траектории движения ЛА.
Кроме того, в заявляемом способе определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата в отличие от известного точку пересечения линии положения наземного источника радиоизлучения с поверхностью Земли определяют с использованием итерационной процедуры поиска вышеупомянутой точки при кусочно-постоянной аппроксимации поверхности Земли с шагом сходимости итерационной процедуры, и, соответственно, с минимальным числом шагов итерационной процедуры, которые выбираются в зависимости от изрезанности рельефа поверхности Земли в зоне радиопеленгации, априорно известной заданной точности определения координат наземного ИРИ, характеризуемой круговой (радиальной) средней квадратической ошибкой определения координат наземного ИРИ, и угла между линией положения наземного источника радиоизлучения и местной вертикалью поверхности Земли, что позволяет повысить точность определения координат наземного ИРИ при одновременном снижении вычислительных затрат.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшим вариантом его осуществления со ссылками на прилагаемые фигуры.
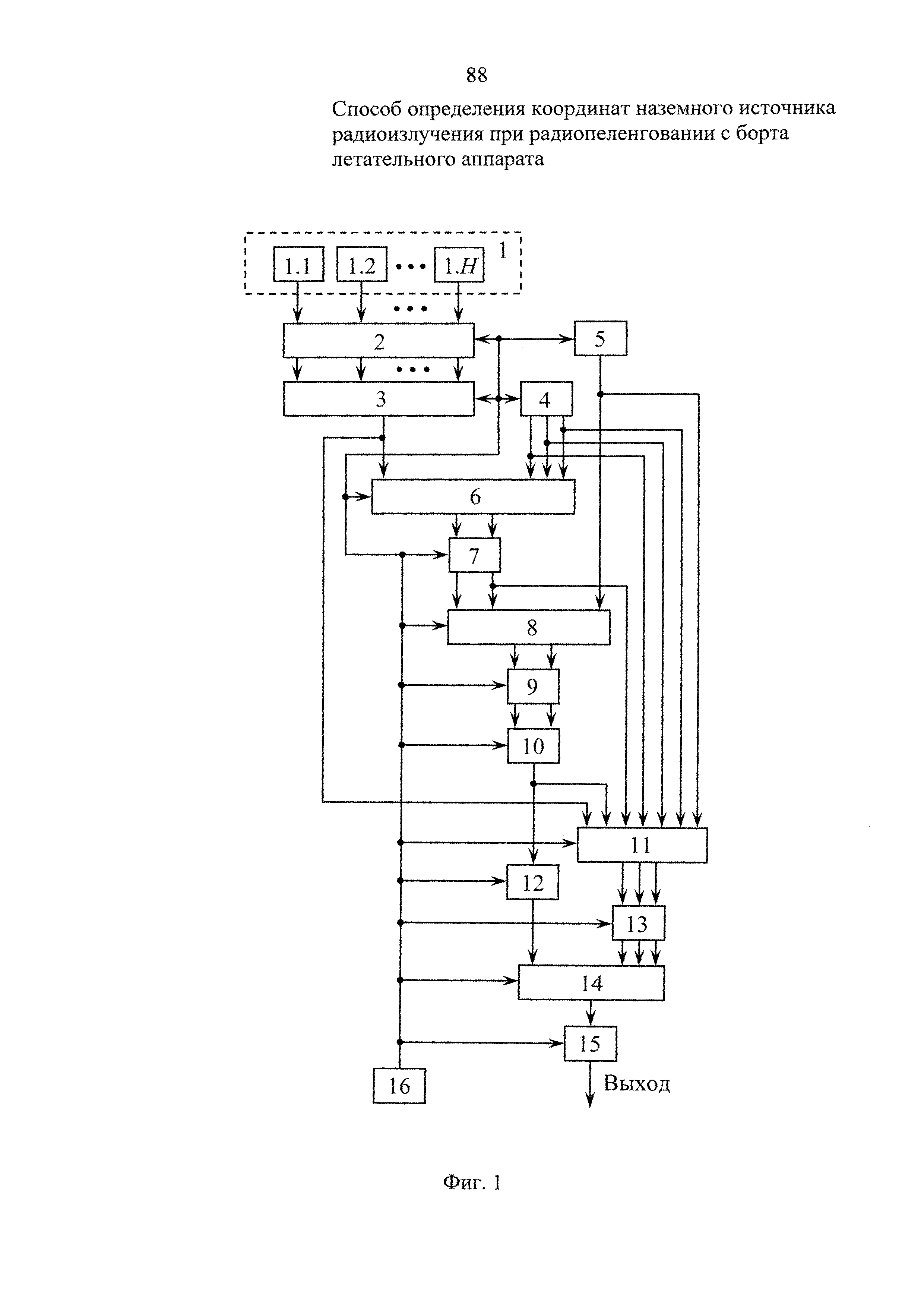
Фиг. 1 изображает функциональную схему устройства определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, реализующего предлагаемый способ.
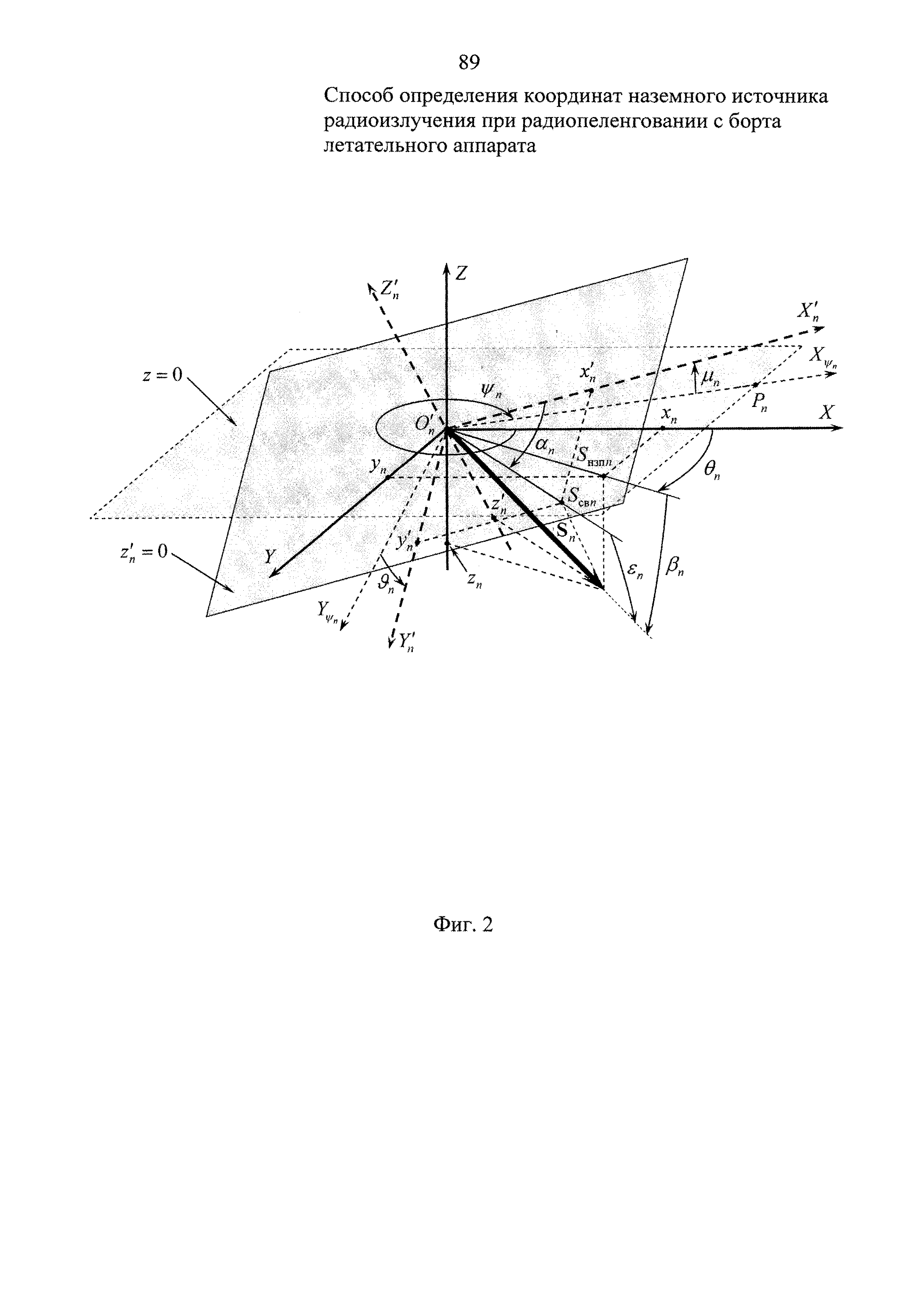
Фиг. 2 - системы координат при радиопеленговании с борта летательного аппарата.
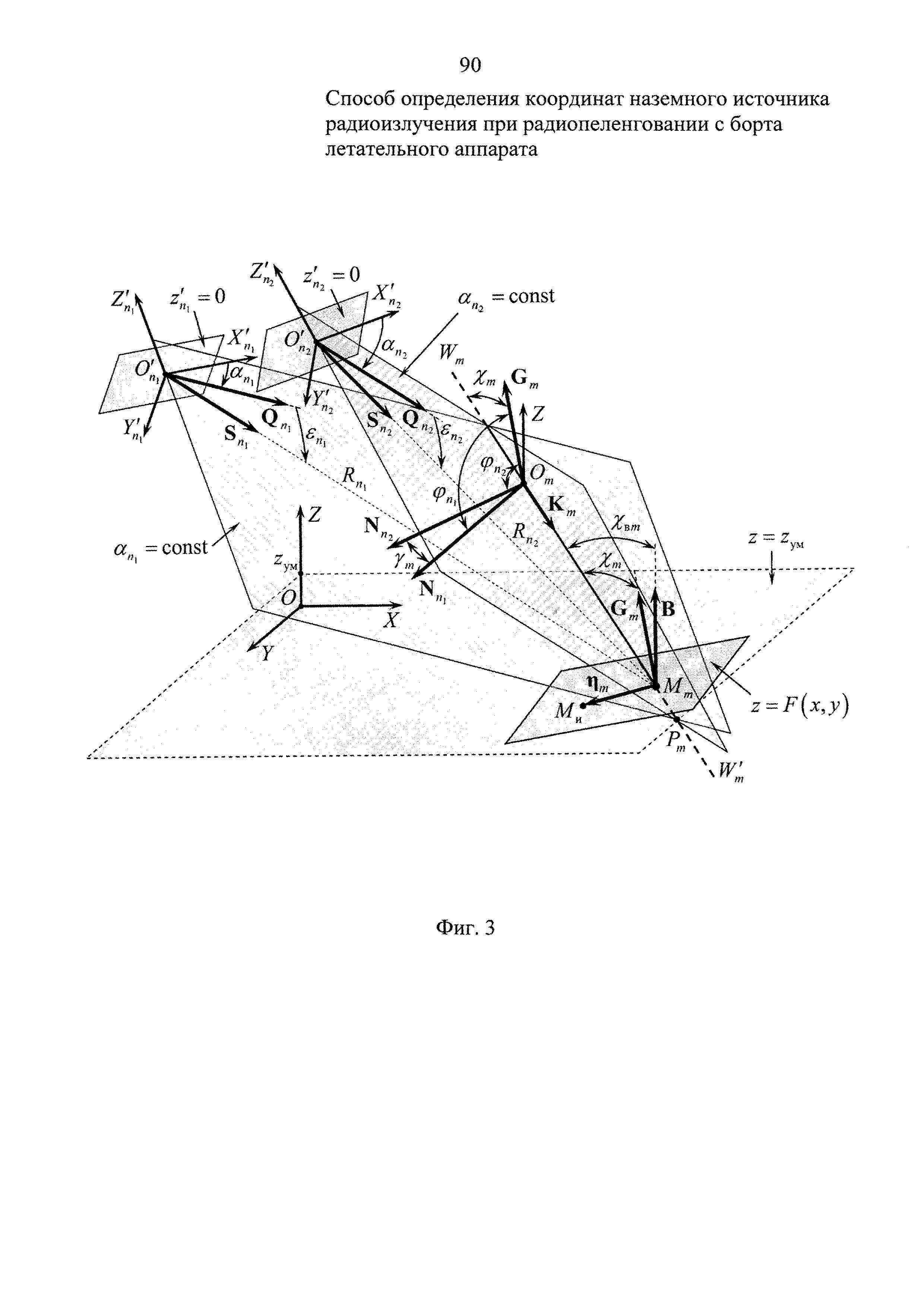
Фиг. 3 - процесс построения линии положения наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата.
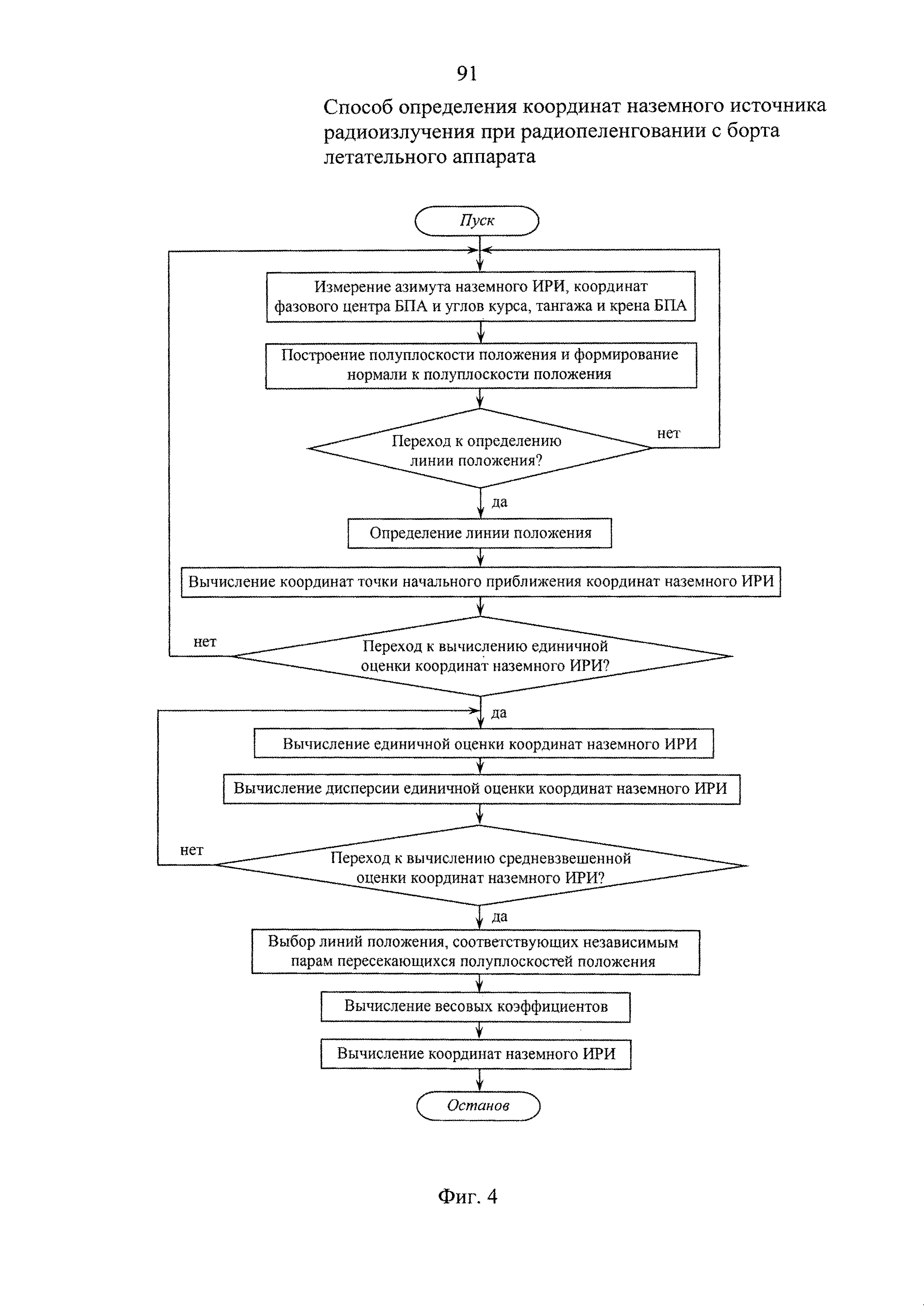
Фиг. 4 - структурную схему общего алгоритма определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата.
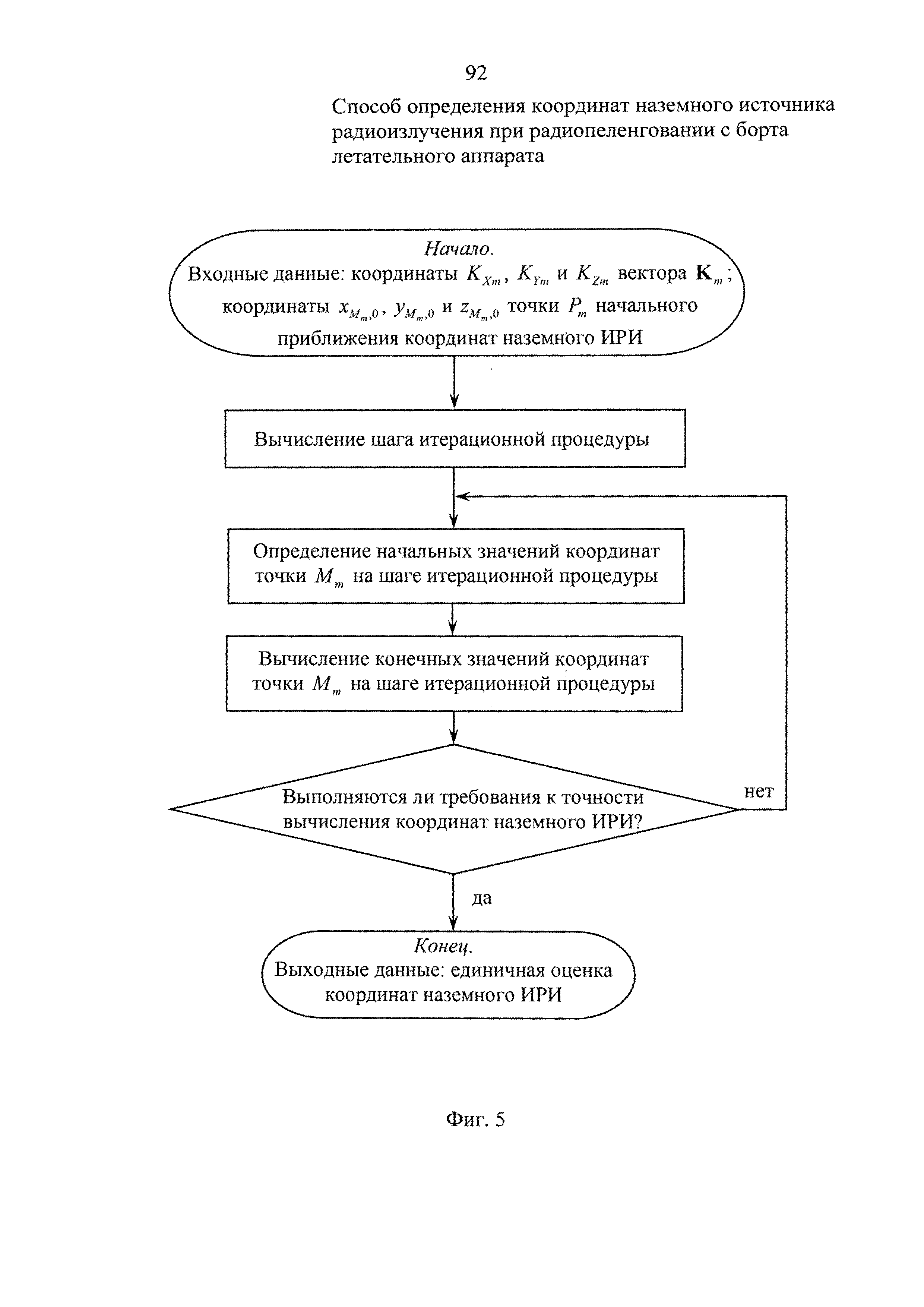
Фиг. 5 - структурную схему алгоритма вычисления единичной оценки координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата.
Устройство определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата (фиг. 1), реализующее предлагаемый способ, содержит бортовую пеленгаторную антенну 1, включающую в своем составе Н антенных элементов 1.1, 1.2, …, Н, обеспечивающих возможность формирования в ее азимутальной плоскости Н пересекающихся диаграмм направленности (амплитудных или фазовых), с числом Н антенных элементов, не меньшем трех, позволяющим в круговом азимутальном секторе 360° однозначно измерять азимут наземного ИРИ и, соответственно, однозначно формировать линию радиопеленга наземного ИРИ в азимутальной плоскости бортовой пеленгаторной антенны 1. Устройство, кроме того, имеет радиоприемный блок 2, выполненный Н-канальным с идентичными каналами и возможностью частотной селекции и измерения параметров (амплитуд или фаз) сигналов в каждом канале, вычислитель азимута 3, выполненный с возможностью определения в пределах от 0 до 360° азимута наземного ИРИ по измеренным значениям параметров (амплитуд или фаз) сигналов в каждом канале и априорно заданным параметрам вычислений, блок 4 определения угловой ориентации бортовой пеленгаторной антенны, выполненный с возможностью определения угловой ориентации продольной, поперечной и нормальной осевых линий бортовой пеленгаторной антенны в нормальной земной системе координат в виде углов курса, тангажа и крена, блок 5 определения координат фазового центра бортовой пеленгаторной антенны, выполненный с возможностью определения абсциссы, ординаты и аппликаты фазового центра бортовой пеленгаторной антенны в нормальной земной системе координат, блок 6 определения полуплоскости положения и формирования нормали к полуплоскости положения, выполненный с возможностью определения координат единичного вектора азимутальной линии полуплоскости положения и нормали к полуплоскости положения в нормальной земной подвижной системе координат, запоминающее устройство 7 координат единичных векторов азимутальных линий полуплоскостей положения и координат нормалей к полуплоскостям положения, блок 8 вычисления параметров линии положения, выполненный с возможностью вычисления параметров линии положения как параметров линии пересечения несовпадающей пары пересекающихся полуплоскостей положения наземного ИРИ, определяемых из условия ортогональности к нормалям несовпадающей пары пересекающихся полуплоскостей положения наземного ИРИ, в виде координат вектора, находящегося на линии положения, в нормальной земной подвижной системе координат, и с возможностью вычисления координат точки начального приближения координат наземного ИРИ в нормальной земной системе координат, запоминающее устройство 9 параметров линий положения, вычислитель 10 единичной оценки координат наземного ИРИ, выполненный с возможностью вычисления координат наземного ИРИ в нормальной земной системе координат как координат точки пересечения линии положения наземного источника радиоизлучения с поверхностью Земли, которые определяются с использованием итерационной процедуры их поиска, шаг сходимости и минимальное число шагов которой выбирают зависящими от изрезанности рельефа поверхности Земли в зоне радиопеленгования, априорно известной заданной точности определения координат наземного ИРИ и угла между линией положения наземного ИРИ и местной вертикалью поверхности Земли, вычислитель 11 дисперсий единичной оценки координат наземного ИРИ, выполненный с возможностью вычислений дисперсии круговой (радиальной) ошибки единичной оценки координат наземного ИРИ и дисперсий составляющих линейных ошибок единичной оценки координат наземного ИРИ по осям абсцисс и ординат нормальной земной системы координат, запоминающее устройство 12 единичных оценок координат наземного ИРИ, запоминающее устройство 13 дисперсий единичных оценок координат наземного ИРИ, вычислитель 14 координат наземного ИРИ, выполненный с возможностью выбора линий положения, соответствующих независимым парам пересекающихся полуплоскостей положения и характеризуемых наименьшими дисперсиями круговых (радиальных) ошибок единичных оценок координат наземного ИРИ, вычисления весовых коэффициентов и вычисления координат наземного ИРИ с учетом полученных значений весовых коэффициентов, модуль 15 картографирования и индикации и модуль 16 программного управления, синхронизирующий работу радиоприемного блока 2, вычислителя азимута 3, блока 4 определения угловой ориентации бортовой пеленгаторной антенны, блока 5 определения координат фазового центра бортовой пеленгаторной антенны, блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения, запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения, блока 8 вычисления параметров линии положения, запоминающего устройства 9 параметров линий положения, вычислителя 10 единичной оценки координат наземного ИРИ, вычислителя 11 дисперсий единичной оценки координат наземного ИРИ, запоминающего устройства 12 единичных оценок координат наземного ИРИ, запоминающего устройства 13 дисперсий единичных оценок координат наземного ИРИ, вычислителя 14 координат наземного ИРИ и модуля 15 картографирования и индикации.
При этом выходы антенных элементов 1.1, 1.2, …, 1.Н, служащие выходами бортовой пеленгаторной антенны 1, подсоединены к входам соответствующих каналов радиоприемного блока 2. Выходы каналов радиоприемного блока 2 подсоединены к соответствующим входам вычислителя азимута 3. Выход вычислителя азимута 3 подсоединен к объединенным первым входам блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и вычислителя 11 дисперсий единичной оценки координат наземного ИРИ. Первый, второй и третий выходы блока 4 определения угловой ориентации бортовой пеленгаторной антенны подсоединены соответственно к объединенным второму входу блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и четвертому входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ, объединенным третьему входу блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и пятому входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ и объединенным четвертому входу блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и шестому входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ. Первый и второй выходы блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения подсоединены соответственно к первому и второму входам запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения. Первый и второй выходы запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения подсоединены соответственно к первому входу блока 8 вычисления параметров линии положения и объединенным второму входу блока 8 вычисления параметров линии положения и третьему входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ. Выход блока 5 определения координат фазового центра бортовой пеленгаторной антенны подсоединен к объединенным третьему входу блока 8 вычисления параметров линии положения и седьмому входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ. Первый и второй выходы блока 8 вычисления параметров линии положения подсоединены соответственно к первому и второму входам запоминающего устройства 9 параметров линий положения, первый и второй выходы которого подсоединены соответственно к первому и второму входам вычислителя 10 единичной оценки координат наземного ИРИ, выход которого подсоединен к объединенным второму входу вычислителя 11 дисперсий единичной оценки координат наземного ИРИ и входу запоминающего устройства 12 единичных оценок координат наземного ИРИ. Первый, второй и третий выходы вычислителя 11 дисперсий единичной оценки координат наземного ИРИ подсоединены соответственно к первому, второму и третьему входам запоминающего устройства 13 дисперсий единичных оценок координат наземного ИРИ. Выход запоминающего устройства 12 единичных оценок координат наземного ИРИ и первый, второй и третий выходы запоминающего устройства 13 дисперсий единичных оценок координат наземного ИРИ подсоединены соответственно к первому, второму, третьему и четвертому входам вычислителя 14 координат наземного ИРИ, выход которого подсоединен к входу модуля 15 картографирования и индикации. Выход модуля 16 программного управления через управляющую шину подсоединен к управляющим входам радиоприемного блока 2, вычислителя азимута 3, блока 4 определения угловой ориентации бортовой пеленгаторной антенны, блока 5 определения координат фазового центра бортовой пеленгаторной антенны, блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения, запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения, блока 8 вычисления параметров линии положения, запоминающего устройства 9 параметров линий положения, вычислителя 10 единичной оценки координат наземного ИРИ, вычислителя 11 дисперсий единичной оценки координат наземного ИРИ, запоминающего устройства 12 единичных оценок координат наземного ИРИ, запоминающего устройства 13 дисперсий единичных оценок координат наземного ИРИ, вычислителя 14 координат наземного ИРИ и модуля 15 картографирования и индикации. Выход модуля 15 картографирования и индикации служит выходной шиной устройства определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата для формирования координат наземного источника радиоизлучения в нормальной земной системе координат.
Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата реализуется следующим образом.
Координаты наземного ИРИ определяются в нормальной земной прямоугольной декартовой системе координат [6. ГОСТ 20058-80 Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения]; [7. ГОСТ 22268-76 Геодезия. Термины и определения]. Отображение координат наземных ИРИ осуществляется на топографических картах местности, представляющих собой отображение поверхности Земли в проекции Гаусса-Крюгера [8. ГОСТ Р 51794-2008 Глобальные навигационные спутниковые системы. Системы координат. Методы преобразования координат определяемых точек]; [9. Бубнов И.А., Кремп А.И., Фолимонов С.И. Военная топография. - М.: Военное издательство Министерства обороны СССР, 1958. - 376 с.]; [10. Сиваков А.М. Военная топография для связистов. - М.: Воениздат, 1974. - 172 с.]. При этом для отображения на топографических картах поверхности Земли используется плоская прямоугольная геодезическая система координат, представляющая собой плоскую левую прямоугольную декартовую систему координат Σпл={O, X, Y}, начало О которой фиксировано по отношению к Земле и находится на поверхности земного эллипсоида, оси абсцисс ОХ и ординат OY которой, называемые соответственно вертикальной и горизонтальной линиями координатной сетки плоской прямоугольной геодезической системы координат, находятся на поверхности земного эллипсоида, координаты x и y точек которой отображают по определенному математическому закону поверхность земного эллипсоида. Следует также отметить, что положительное направление оси абсцисс ОХ плоской прямоугольной геодезической системы координат, называемое северным направлением вертикальной линии координатной сетки плоской прямоугольной геодезической системы координат, совпадает с северным направлением истинного меридиана или отличается от него на угол сближения меридианов [9], [10]. Учитывая вышеупомянутые особенности отображения координат точек и обозначения осей в плоской прямоугольной геодезической системе координат для определения координат наземного источника радиоизлучения с борта летательного аппарата целесообразно использовать нормальную земную левую прямоугольную систему координат Σнз={O, X, Y, Z}, представляющую собой левую пространственную прямоугольную декартовую систему координат, начало О которой фиксировано по отношению к Земле, ось абсцисс ОХ которой, находящаяся в горизонтальной плоскости, совпадает с северным направлением истинного или магнитного меридиана или вертикальной линии координатной сетки плоской прямоугольной геодезической системы координат, ось аппликат OZ которой перпендикулярна горизонтальной плоскости и направлена вверх по вертикали, а ось ординат OY которой, находящаяся в горизонтальной плоскости XOY, дополняет систему до левой пространственной прямоугольной декартовой системы координат. Отметим также, что под местной вертикалью понимают прямую, совпадающую с направлением силы тяжести в районе рассматриваемой точки Земли, и, соответственно, плоскость, проходящую через местную вертикаль, называют вертикальной плоскостью, а вышеупомянутая горизонтальная плоскость XOY перпендикулярна местной вертикали [7].
Отсчет углов при радиопеленговании ИРИ и, в частности, наземных ИРИ, осуществляется в связанной системе координат бортовой пеленгаторной антенны (БПА) Σсв={O', X', Y', Z'}, представляющей собой левую пространственную прямоугольную декартовую систему координат, начало О' которой помещено в фазовом центре БПА, осями которой являются продольная, поперечная и нормальная осевые линии БПА, являющиеся осями абсцисс О'Х', ординат O'Y' и аппликат O'Z' соответственно. При этом фазовый центр БПА представляет собой точку БПА, относительно которой алгебраическая сумма фазовых диаграмм, формируемых БПА для осуществления радиопеленгования ИРИ, постоянна или кусочно-постоянна с наличием скачков на 180° [11. ГОСТ 23282-91 Решетки антенные. Термины и определения]. Продольная осевая линия БПА, являющаяся осью абсцисс О'Х' связанной системы координат БПА Σсв={O', X', Y', Z'}, расположена в азимутальной плоскости БПА, проходит через фазовый центр О' БПА и ориентирована в направлении, совпадающем с положительным направлением оси симметрии совокупности пересекающихся диаграмм направленности или фазовых диаграмм, формируемых БПА для осуществления радиопеленгования ИРИ, принятая за начало отсчета углов в азимутальной плоскости БПА. Поперечная осевая линия БПА, являющаяся осью ординат O'Y' связанной системы координат БПА Σсв={O', X', Y', Z'}, также расположена в азимутальной плоскости БПА, проходит через фазовый центр О' БПА, перпендикулярна продольной осевой линии БПА и направлена к правой части БПА. То есть, азимутальная плоскостью БПА является плоскость X'O'Y', содержащая взаимно перпендикулярные продольную и поперечную осевые линии БПА, пересекающиеся в ее фазовом центре О' и соответствующие осям соответственно абсцисс О'Х' и ординат O'Y' левой плоской прямоугольной декартовой системы координат

Пространственное положение БПА, размещенной на ЛА, в нормальной земной левой прямоугольной системе координат Σнз={O, X, Y, Z}, необходимое для определения координат наземных ИРИ, характеризуется: во-первых, координатами xц, yц и zц фазового центра О' БПА в нормальной земной левой прямоугольной системе координат Σнз={O, X, Y, Z}; во-вторых, углами курса ψ, тангажа μ и крена ϑ, определяющими угловую ориентацию продольной О'Х', поперечной O'Y' и нормальной O'Z' осевых линий БПА в нормальной земной подвижной системе координат Σнзп={O', X, Y, Z}, представляющей собой левую пространственную прямоугольную декартовую систему координат, начало О' которой помещено в фазовом центре О' БПА, о оси абсцисс О'Х, ординат O'Y и аппликат O'Z которой направлены также как и оси соответственно абсцисс ОХ, ординат OY и аппликат OZ нормальной земной левой пространственной прямоугольной декартовой системы координат Σнз={O, X, Y, Z} [6]; [8]; [12. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. - М.: Наука, 1976. - 622 с.]. При этом угол курса ψ БПА представляет собой угол между проекцией на горизонтальную плоскость XO'Y нормальной земной подвижной системы координат Σнзп={O', X, Y, Z} положительного направления продольной осевой линии О'Х' БПА и линией О'Х, расположенной в горизонтальной плоскости XO'Y, проходящей через фазовый центр О' БПА, принятой за начало отсчета, совпадающей с северным направлением истинного или магнитного меридиана или вертикальной линии ОХ координатной сетки плоской прямоугольной геодезической системы координат Σпл={O, Х, Y}, измеряемый в градусах в пределах от 0° до 360° и отсчитываемый от вышеупомянутой линии О'Х по ходу часовой стрелки если смотреть в направлении вниз по вертикали, проходящей через фазовый центр О' БПА. Угол тангажа μ БПА представляет собой угол между продольной осевой линией О'Х' БПА и горизонтальной плоскостью XO'Y нормальной земной подвижной системы координат Σнзп={O', X, Y, Z}, проходящей через фазовый центр О' БПА, измеряемый в градусах в пределах от 0° до ±90°, отсчитываемый от горизонтальной плоскости XO'Y с положительным или отрицательным знаками в случае если положительное направление продольной осевой линии О'Х' БПА находится соответственно выше или ниже горизонтальной плоскости XO'Y. Угол крена ϑ БПА представляет собой угол между поперечной осевой линией O'Y' БПА и осью ординат O'Yψ смещенной нормальной земной подвижной системы координат Σнзпψ={O', Xψ, Yψ, Z}, представляющую собой нормальную земную подвижную левую прямоугольную декартовую систему координат, оси абсцисс O'Хψ и ординат O'Yψ которой смещены относительно осей соответственно абсцисс О'Х и ординат O'Y нормальной земной подвижной системы координат Σнзп={O', X, Y, Z} в положение, при котором угол курса ψ БПА равен нулю, измеряемый в градусах в пределах от 0° до ±90°, отсчитываемый от оси ординат O'Y смещенной нормальной земной подвижной системы координат Σнзпψ={O', Xψ, Yψ, Z} с положительным или отрицательным знаками в случае если положительное направление оси ординат O'Yψ смещенной нормальной земной подвижной системы координат Σнзпψ={О', Xψ, Yψ, Z} совмещается с положительным направлением поперечной осевой линии O'Y' БПА поворотом вокруг продольной осевой линии О'Х' БПА соответственно по ходу или против хода часовой стрелки если смотреть в положительном направлении продольной осевой линии О'Х' БПА.
Единичный вектор S направления от фазового центра О' БПА на ИРИ в нормальной земной подвижной системе координат Σнзп={О', X, Y, Z} характеризуется двумя углами - углом в горизонтальной плоскости и углом в вертикальной плоскости, называемыми радиопеленгом θ и углом возвышения β соответственно [2]. При этом радиопеленг θ представляет собой угол между проекцией на горизонтальную плоскость XO'Y единичного вектора S направления от фазового центра О' БПА на ИРИ и линией, расположенной в горизонтальной плоскости XO'Y, проходящей через фазовый центр О' БПА и принятой за начало отсчета, совпадающей с северным направлением истинного или магнитного меридиана или вертикальной линией координатной сетки плоской прямоугольной геодезической системы координат, измеряемый в градусах в пределах от 0° до 360° и отсчитываемый от вышеупомянутой линии по ходу часовой стрелки если смотреть в направлении вниз по вертикали, проходящей через фазовый центр О' БПА. Угол возвышения β представляет собой угол между единичным вектором S направления от фазового центра О' БПА на ИРИ и проекцией вышеупомянутого направления на горизонтальную плоскость XO'Y, измеряемый в градусах в пределах от 0° до ±90°, отсчитываемый от вышеупомянутой проекции на горизонтальную плоскость XO'Y с положительным или отрицательным знаками в случае если ИРИ находится соответственно выше или ниже горизонтальной плоскости XO'Y, проходящей через фазовый центр О' БПА.
Кроме того, единичный вектор S направления от фазового центра О' БПА на ИРИ в ранее упомянутой Связанной системе координат БПА Σсв={О', X', Y', Z'}, начало О' которой совпадает с фазовым центром О' БПА, характеризуется также двумя углами - углом в азимутальной плоскости БПА и углом в угломестной плоскости БПА, называемыми азимутом α и углом места ε соответственно. При этом азимут α представляет собой угол между проекцией единичного вектора S направления от фазового центра О' БПА на ИРИ на азимутальную плоскость БПА X'O'Y', содержащую продольную О'Х' и поперечную O'Y' осевые линии БПА, и положительным направлением продольной осевой линии О'Х' БПА, измеряемый в градусах в пределах от 0° до 360° и отсчитываемый от положительного направления продольной осевой линии О'Х' БПА по ходу часовой стрелки если смотреть в направлении навстречу положительному направлению нормальной осевой линии O'Z' БПА. Таким образом, параметром, характеризующим линию радиопеленга в азимутальной плоскости бортовой пеленгаторной антенны является азимут α ИРИ.
Угол места ε представляет собой угол между единичным вектором S направления от фазового центра О' БПА на ИРИ и проекцией вышеупомянутого направления на азимутальную плоскость X'O'Y' БПА, в которой размещены продольная О'Х' и поперечная O'Y' осевые линии БПА, измеряемый в градусах в пределах от 0° до ±90°, отсчитываемый от вышеупомянутой проекции на азимутальную плоскость X'O'Y' БПА с положительным или отрицательным знаками в случае если ИРИ находится соответственно выше или ниже азимутальной плоскости X'O'Y' БПА, проходящей через фазовый центр О' БПА.
В процессе полета летательного аппарата, на котором размещены БПА и устройство определения координат фазового центра БПА и угловой ориентации продольной, поперечной и нормальной осевых линий БПА, координаты xц, yц и zц фазового центра О' БПА, единичный вектор S направления от фазового центра О' БПА на наземный ИРИ и углы курса ψ, тангажа μ и крена ϑ БПА, определяющие угловую ориентацию продольной О'Х', поперечной O'Y' и нормальной O'Z' осевых линий БПА в нормальной земной подвижной системе координат Σнзп={O', X, Y, Z}, непрерывно изменяются. При этом для определения координат наземного ИРИ с борта летательного аппарата регистрацию полученных данных об азимуте ИРИ, координатах фазового центра БПА и углах курса, тангажа и крена БПА осуществляют периодически отсчетами, имеющими порядковые номера n, находящимися в пределах 1≤n≤nmax, где nmax - общее число отсчетов, для которого выполняется соотношение nmax≥2:
На фиг. 2 приведены соответствующие n-му отсчету вышеупомянутых данных (где n=1, 2, 3, … - порядковый номер отсчета) связанная система координат БПА






























Взаимосвязь между прямоугольными декартовыми координатами xn, yn и zn единичного вектора Sn направления от фазового центра



Аналогичная взаимосвязь между прямоугольными декартовыми координатами





Взаимосвязь между прямоугольными декартовыми координатами






где



























Аналогичная взаимосвязь между прямоугольными декартовыми координатами xn, yn и zn единичного вектора Sn направления от фазового центра





Входящие в соотношения (3) и (4) направляющие косинусы осей координат


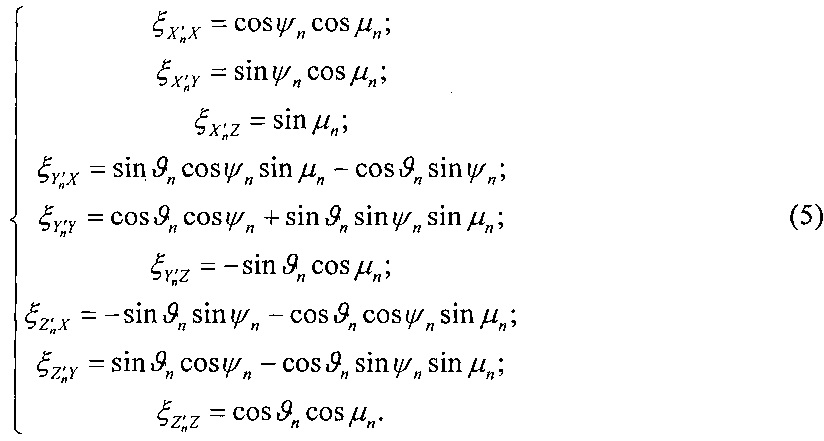
С учетом соотношений (5) взаимосвязи между радиопеленгом θn и углом возвышения βn наземного ИРИ с одной стороны и азимутом αn и углом места εn наземного ИРИ с другой стороны определяются соотношениями
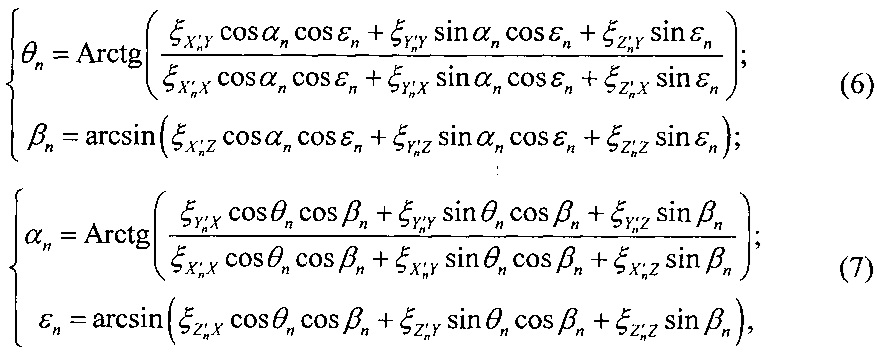

С использованием БПА при n-м отсчете данных осуществляется измерение азимута αn наземного ИРИ, который определяет угловую ориентацию проекции











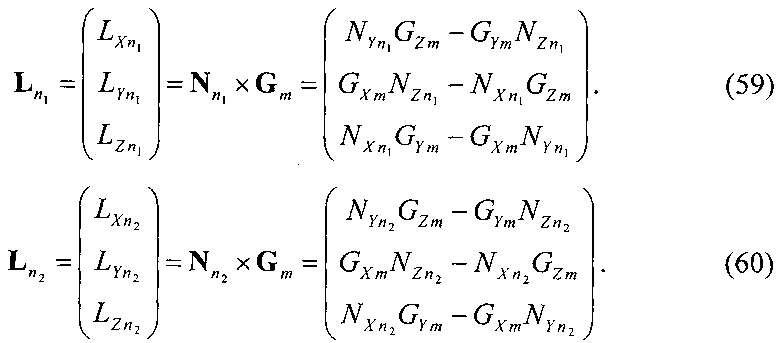
Единичные векторы Qn n-х азимутальных линий и нормали Nn к соответствующим n-м полуплоскостям положения наземного ИРИ в соответствующих n-х связанных системах координат

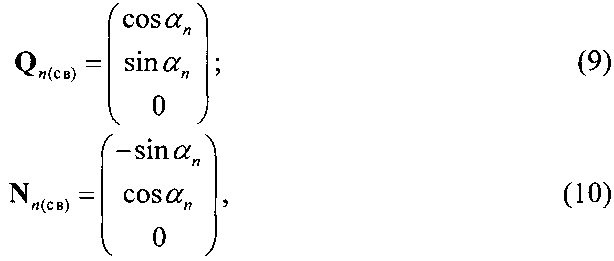
где n=1, 2, … - порядковые номера отсчетов данных.
Вышеупомянутые единичные векторы Qn n-х азимутальных линий и нормали Nn к соответствующим n-м полуплоскостям положения наземного ИРИ в n-й нормальной земной подвижной системе координат
где QXn, QYn и QZn - прямоугольные декартовые координаты единичного вектора Qn n-й азимутальной линии в n-й нормальной земной подвижной системе координат





NXn, NYn и NZn - прямоугольные декартовые координаты нормали Nn к n-й полуплоскости положения наземного ИРИ в n-й нормальной земной подвижной системе координат








Радиус-вектор rn любой точки, принадлежащей n-й полуплоскости положения наземного ИРИ, в n-й нормальной земной подвижной системе координат


где r - радиус-вектор точки, характеризуемый прямоугольными декартовыми координатами x, y и z в нормальной земной системе координат

Каждая m-я пара полуплоскостей положения наземного ИРИ формируется с использованием соответствующих m-й паре несовпадающих n1-го и n2-го отсчетов данных, которые из общего числа отсчетов данных 1≤n≤nmax выбираются в соответствии с соотношениями

Из соотношений (15) следует, что из общего числа отсчетов данных 1≤n≤nmax может быть сформирована совокупность пар полуплоскостей положения наземного ИРИ, соответствующих несовпадающим n1-м и n2-м отсчетам данных, максимальное число mmax которых определяется соотношением

При этом следует отметить, что из всей совокупности mmax пар полуплоскостей положения наземного ИРИ, соответствующих несовпадающим n1-м и n2-м отсчетам данных, из-за погрешностей формирования n1-й и n2-й полуплоскостей положения наземного ИРИ, обусловленных в первую очередь ошибками измерений азимутов



На фиг. 3 показано построение m-й линии положения











































Параметры m-й линии







Из соотношения (17) с учетом (12) и (13) следует, что прямоугольные декартовые координаты KXm, KYm и KZm вектора Km в нормальной земной подвижной системе координат Zнзпm={Оm, Х, Y, Z} могут быть представлены в виде матрицы-столбца Km(нзп), имеющей размер 3×1, в соответствии с соотношением

где
















Таким образом, в предложенном способе определения координат наземного источника радиоизлучения с борта летательного аппарата, в отличие от аналога [4] и прототипа [5], линии положения наземного источника радиоизлучения определяются в аналитическом виде в соответствии с соотношениями (17) и (18) как линии пересечения соответствующих пар пересекающихся полуплоскостей положения наземного источника радиоизлучения, параметры которых не зависят от параметров поверхности Земли, за счет чего повышается точность их определения при одновременном снижении вычислительных затрат. При этом определенные вышеупомянутым образом линии положения наземного источника радиоизлучения, в отличие от аналога [4] и прототипа [5], характеризуются ненулевыми значениями угла их пересечения с горизонтальной плоскостью и, соответственно, для определения координат наземного источника радиоизлучения как точки пересечения линии положения наземного источника радиоизлучения с поверхностью Земли можно использовать всего одну линию положения наземного источника радиоизлучения.
Система соотношений, которым должны удовлетворять прямоугольные декартовые координаты





где
















Выразив скалярные произведения векторов, описываемых первым, вторым, третьим и четвертым соотношениями системы соотношений (19), в прямоугольных декартовых координатах, систему соотношений (19) можно с учетом вышеупомянутых обозначений параметров



где















Следует отметить, что выполнение двух неравенств, определяемых третьим и четвертым соотношениями, входящими в систему соотношений (20), является необходимым условием пересечения n1-й и n2-й полуплоскостей положения наземного ИРИ, и, соответственно, необходимым условием формирования m-й линии положения наземного источника радиоизлучения как линии пересечения m-й пары пересекающихся n1-й и n2-й полуплоскостей положения наземного ИРИ. Поэтому для определения соответствия m-й линии положения наземного источника радиоизлучения линии пересечения m-й пары пересекающихся n1-й и n2-й полуплоскостей положения наземного ИРИ осуществляется следующая процедура проверок.
В нормальной земной системе координат Σнз={O, X, Y, Z} определяются прямоугольные декартовые координаты








Решение системы уравнений (21) относительно абсциссы


где



С учетом априорно известного значения аппликаты





Если хотя бы одно неравенство пары неравенств (26) не выполняется, найденная точка начального приближения координат наземного ИРИ при использовании m-й линии положения

Если оба неравенства пары неравенств (26) выполняются, найденная точка начального приближения координат наземного ИРИ при использовании m-й линии положения


где bm - соответствующая m-й линии положения
При этом в заявляемом способе определения координат наземного источника радиоизлучения с борта летательного аппарата прямоугольные декартовые координаты


Таким образом, в предложенном способе определения координат наземного источника радиоизлучения с борта летательного аппарата, в отличие от аналога [4] и прототипа [5], определение координат наземного источника радиоизлучения осуществляется путем определения координат точки пересечения линии положения наземного источника радиоизлучения, параметры которой заданы в аналитическом виде, с поверхностью Земли, что при заданной априорно известной кусочно-постоянной аппроксимации поверхности Земли позволяет повысить точность определения координат наземного источника радиоизлучения при одновременном снижении вычислительных затрат.
Для определения координат наземного ИРИ с борта летательного аппарата регистрацию полученных данных об азимуте ИРИ, координатах фазового центра БПА и углах курса, тангажа и крена БПА осуществляют периодически отсчетами. Определение азимута ИРИ, координат фазового центра БПА и углы курса, тангажа и крена БПА в ходе полета ЛА производятся многократно. Для нахождения координат наземного ИРИ достаточно определения точки пересечения одной (любой) m-й линии




где wXm и wYm - весовые коэффициенты m-й единичной оценки соответственно абсцисс











где

Максимальное число


а при нечетном общем числе nmax отсчетов данных, не меньшем трех, определяется соотношением

Следует отметить, что в случае когда





С учетом соотношения (28) и пятого соотношения системы уравнений (20), средневзвешенная оценка аппликаты


Дисперсии


Для определения дисперсий


расстояния


радиопеленги


углы возвышения


углы места


единичные векторы




единичный вектор нормали Gm к поверхности Земли при ее кусочно-постоянной аппроксимации в районе точки Мm пересечения m-й линии


При этом расстояния


Радиопеленги


Углы возвышения

Углы места



где













Единичные векторы




где







Единичный вектор нормали Gm к поверхности Земли при ее кусочно-постоянной аппроксимации в районе точки Мm пересечения линии m-й линии


где






Δl - шаги вдоль осей абсцисс и ординат двухмерной координатной сетки горизонтальной плоскости XOY нормальной земной системы координат Σнз={O, X, Y, Z} при кусочно-постоянной аппроксимации поверхности Земли, значения которых выбирают в соответствии с соотношением

где σр - априорно известное требуемое значение круговой (радиальной) средней квадратической ошибки определения координат наземного ИРИ.
С использованием полученных данных измерений и расчетов вышеупомянутых параметров определение дисперсий


При отсчетах данных ошибки радиопеленгования являются статистически независимыми. Поэтому случайные ошибки






где



Систему уравнений (44) можно представить в матричном виде следующим образом
где Vm - квадратная матрица размера, имеющая размер 3×3, определяемая соотношением
Тогда из соотношения (45) с учетом (46) для матрицы-столбца случайного радиус-вектора ηm, имеющего размер 3×1, получаем следующее соотношение

где

Корреляционную матрицу


где




При этом с учетом (47) и (48) корреляционную матрицу


где


Так как случайные ошибки


где


С учетом (46) и (50) соотношение (49) может быть представлено в виде

С учетом (46), (48) и (51) элементы



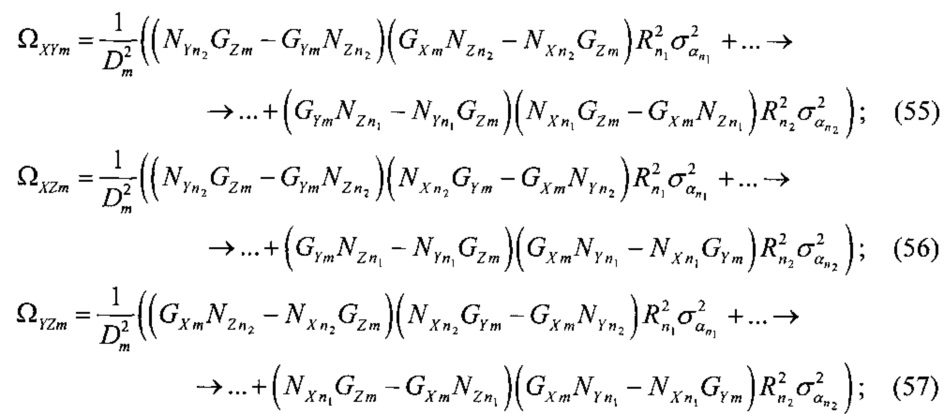
где Dm - определитель матрицы Vm, определяемый соотношением

Зависимость элементов






Для векторов





где












Из соотношений (59)-(62) получаем следующие соотношения

Кроме того, с учетом (39) и (40) взаимосвязи между векторами




Зависимость определителя Dm матрицы Vm от углов γm и χm (см. фиг. 3) можно определить следующим образом.
Для вектора Km в нормальной земной подвижной системе координат


где





С учетом (17), (18), (41) и (67) для скалярного произведения вектора Km(нзп) и единичного вектора нормали Gm к поверхности Земли в нормальной земной подвижной системе координат


где



Из соотношений (58), (68) и (69) следует, что определитель Dm матрицы Vm может быть представлен соотношением

Дисперсии











где



С учетом (42)-(54), (65), (70) и (71) диагональные элементы



где m=1, 2, …,
В заявляемом способе определения координат наземного ИРИ средневзвешенная оценка аппликаты




Дисперсия круговой (радиальной) ошибки






где


С учетом (72), (73) и (76) дисперсия круговой (радиальной) ошибки


где m=1, 2, …,
Согласно изобретению с учетом (15), (16), (30) и (31) из общего числа
















Согласно изобретению при определении средневзвешенных оценок абсциссы




где m=1, 2, …,

При этом, согласно (78) и (79), в отличие от прототипа [5], значения весовых коэффициентов wXm и wYm m-й единичной оценки соответственно абсцисс










Структурная схема общего алгоритма, иллюстрирующего заявляемый способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, приведена на фиг. 4.
В заявляемом способе определения координат наземного источника радиоизлучения с борта летательного аппарата прямоугольные декартовые координаты



Для однозначного определения с использованием соотношения (27) точки Мm пересечения m-й линии

где sgn(KZm) - функция знака, определяемая соотношением [13]

При кусочно-постоянной аппроксимации поверхности Земли, определяемой пятым соотношением системы соотношений (20), решение системы уравнений (27) с учетом (80) относительно прямоугольных декартовых координат



где xm,J, ym,J и zm,J - начальные значения соответственно абсциссы, ординаты и аппликаты прямоугольных декартовых координат точки Мm на (j+1)-м шаге (итерации) итерационной процедуры;
xm,j+1, ym,j+1 и zm,j+1 - конечные значения соответственно абсциссы, ординаты и аппликаты прямоугольных декартовых координат точки Мm на (j+1)-м шаге (итерации) итерационной процедуры;
j=0, 1, …, (J-1) - порядковые номера начальных значений прямоугольных декартовых координат точки Мm на (j+1)-х шагах (итерациях) итерационной процедуры;



J=1, 2, … - минимальное число шагов (итераций) итерационной процедуры, обеспечивающее выполнение пары неравенств, определяемых соотношениями
где δX и δY - априорно известные максимально допустимые погрешности определения соответственно абсциссы xm,J и ординаты ym,J прямоугольных декартовых координат точки размещения ИРИ на земной поверхности, обусловленные итерационной процедурой определения прямоугольных декартовых координат xm,J, ym,J и zm,J точки Мm при наличии погрешностей кусочно-постоянной аппроксимации поверхности Земли, которые выбирают на порядок меньшими априорно известного требуемого значения круговой (радиальной) средней квадратической ошибки σр определения координат наземного ИРИ.
По завершении итерационной процедуры, (82), характеризуемой минимальным числом J ее шагов (итераций), обеспечивающим выполнение пары неравенств (83), прямоугольные декартовые координаты



Структурная схема алгоритма, иллюстрирующего заявляемый способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата в части вычисления единичной оценки координат наземного источника радиоизлучения в соответствии с соотношениями (27), (80)-(84), приведена на фиг.5.
Таким образом, в заявляемом способе определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата в отличие от прототипа [5] точку пересечения линии положения наземного источника радиоизлучения с поверхностью Земли определяют с использованием итерационной процедуры поиска вышеупомянутой точки при кусочно-постоянной аппроксимации поверхности Земли с шагом сходимости итерационной процедуры, и, соответственно, с минимальным числом шагов итерационной процедуры, которые выбирают в зависимости от изрезанности рельефа поверхности Земли в зоне радиопеленгации, определяемого формой функции F(xm,J, ym,J), в зависимости от априорно известной заданной точности определения координат наземного ИРИ, характеризуемой круговой (радиальной) средней квадратической ошибкой σр определения координат наземного ИРИ, и в зависимости от угла χвm между m-й линией




Следует отметить, что взаимосвязь между углом χвm и отношений



Весь цикл определения координат наземного ИРИ предлагаемым способом может быть реализован с помощью устройства определения координат наземного ИРИ, функциональная схема которого приведена на фиг. 1.
Устройство определения координат наземного ИРИ, реализующее предлагаемый способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата (фиг. 1), функционирует следующим образом.
Под воздействием электромагнитного поля радиосигнала, излучаемого на частоте ƒ наземным источником радиоизлучения, характеризуемого при n-м отсчете данных при радиопеленговании с борта ЛА амплитудой Еn и фазой ς0n в фазовом центре




где h=1, 2, …, H - порядковый номер антенных элементов БПА;
Uh,n=Dh(αn, ƒ)cos εnEn - амплитуда радиосигнала наземного ИРИ, принятого h-м антенным элементом БПА;

Dh(αn, ƒ) и ϕh(αn, ƒ) - соответственно амплитудная диаграмма направленности (по полю) и фазовая диаграмма h-го антенного элемента БПА в азимутальной плоскости БПА, соответствующей плоскости


t - время;
i=

Радиосигналы, принятые антенными элементами 1.1, 1.2, 1.Н бортовой пеленгаторной антенны 1, описываемые соотношениями (86), с соответствующих выходов бортовой пеленгаторной антенны 1 поступают на входы соответствующих каналов радиоприемного блока 2.
Запуск функционирования радиоприемного блока 2, блока 4 определения угловой ориентации бортовой пеленгаторной антенны и блока 5 определения координат фазового центра бортовой пеленгаторной антенны в процессе полета ЛА осуществляется многократно периодически для получения совокупности отсчетов данных, с их общим числом nmax, не меньшем двух. При этом запуск функционирования радиоприемного блока 2, блока 4 определения угловой ориентации бортовой пеленгаторной антенны и блока 5 определения координат фазового центра бортовой пеленгаторной антенны при каждом n-м отсчете данных (1≤n≤nmax) осуществляется одновременно по команде модуля 16 программного управления.
При этом по команде, соответствующей n-му отсчету данных, поступающей с выхода модуля 16 программного управления на управляющий вход радиоприемного блока 2, сигналы






где Δt - интервал равномерной дискретизации сигналов по времени;

ΔT - требуемое (допустимое при фильтрации сигналов в полосе частот ΔF) время наблюдения радиосигналов;
νд=0, 1, …, (Vд-1) - порядковые номера временных отсчетов радиосигналов;
lƒ=0, 1, …, (Vд-1) - номер спектральных составляющих радиосигналов.
При этом после осуществления преобразования Фурье согласно вышеупомянутому выражению принятые радиосигналы представляются в виде Vд комплексных спектральных составляющих, частотное расстояние между которыми, то есть фактически частотное разрешение, составляет





По полученным действительным


где h=1, 2, …, H;
n=1, 2, … - порядковые номера отсчетов данных.
Сигналы, соответствующие значениям измеренных параметров радиосигналов (амплитуд Uh,n(αn) или фаз Ψh,n(αn)), с Н выходов радиоприемного блока 2 поступают на соответствующие входы вычислителя азимута 3.
По команде, соответствующей n-му отсчету данных, поступающей с выхода модуля 16 программного управления на управляющий вход блока 4 определения угловой ориентации бортовой пеленгаторной антенны в блоке 4 определения угловой ориентации бортовой пеленгаторной антенны производится измерение углов курса ψn, тангажа μn и крена ϑn бортовой пеленгаторной антенны, определяющие угловую ориентацию продольной О'Х', поперечной O'Y' и нормальной O'Z' осевых линий бортовой пеленгаторной антенны 1 в нормальной земной подвижной системе координат Σнзп={О', X, Y, Z} при n-м отсчете данных (см. фиг. 2). Сигналы, соответствующие полученным значениям углов курса ψn, тангажа μn и крена ϑn бортовой пеленгаторной антенны с первого, второго и третьего выходов блока 4 определения угловой ориентации бортовой пеленгаторной антенны поступают соответственно на объединенные второй вход блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и четвертый вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ, объединенные третий вход блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и пятый вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ и объединенные четвертый вход блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и шестой вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ.
По команде, соответствующей n-му отсчету данных, поступающей с выхода модуля 16 программного управления на управляющий вход блока 5 определения координат фазового центра бортовой пеленгаторной антенны в блоке 5 определения координат фазового центра бортовой пеленгаторной антенны производится измерение прямоугольных декартовых координат хцn, yцn и zцn фазового центра бортовой пеленгаторной антенны 1 в нормальной земной системе координат Σнз={O, X, Y, Z} при n-м отсчете данных (см. фиг. 3). Сигналы, соответствующие полученным значениям координат хцn, yцn и zцn фазового центра бортовой пеленгаторной антенны, с выхода блока 5 определения координат фазового центра бортовой пеленгаторной антенны в виде кодированных значений поступают на объединенные третий вход блока 8 вычисления параметров линии положения и седьмой вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ.
По команде, соответствующей n-му отсчету данных, поступающей с выхода модуля 16 программного управления на управляющий вход вычислителя азимута 3, в вычислителе азимута 3 путем сравнения параметров (амплитуд Uh,n(αn) или фаз Ψh,n(αn)) радиосигналов и с использованием априорно заданных параметров вычислений, соответствующих реализуемому методу радиопеленгования и структуре бортовой пеленгаторной антенны 1, в пределах от 0 до 360° определяется оценка азимута αn наземного ИРИ, соответствующая n-му отсчету данных. Сигнал, соответствующий полученному значению азимута αn наземного ИРИ, с выхода вычислителя азимута 3, поступает на объединенные первые входы блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения и вычислителя 11 дисперсий единичной оценки координат наземного ИРИ.
По команде, соответствующей n-му отсчету данных, поступающей с выхода модуля 16 программного управления на управляющий вход блока 6 определения полуплоскости положения и формирования нормали к полуплоскости положения в блоке 6 определения полуплоскости положения и формирования нормали к полуплоскости положения в соответствии с соотношениями (5) и (11)-(13) производится вычисление прямоугольных декартовых координат QXn, QYn и QZn единичного вектора Qn азимутальной линии n-й полуплоскости положения и прямоугольных декартовых координат NXn, NYn и NZn нормали Nn к n-й полуплоскости положения в нормальной земной подвижной системе координат

По завершении совокупности nmax отсчетов данных, в результате которых в вышеупомянутых блоках устройства определения координат наземного ИРИ при радиопеленговании с борта ЛА определяются совокупности азимутов αn, углов курса Ψn, тангажа μn и крена ϑn бортовой пеленгаторной антенны 1, координаты хцп, yцn и zцn фазовых центров бортовой пеленгаторной антенны 1, координаты QXn, QYn и QZn единичных векторов Qn азимутальных линий n-х полуплоскостей положения и координаты NXn, NYn и NZn нормалей Nn к n-м полуплоскостям положения для n-х отсчетов данных, где 1≤n≤nmax, по команде, поступающей с выхода модуля 16 программного управления на управляющий вход запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения сигналы, соответствующие кодированным значениям координат QXn, QYn и QZn единичного вектора Qn азимутальной линии n-й полуплоскости положения и сигналы, соответствующие кодированным значениям координат NXn, NYn и NZn нормалей Nn к n-м полуплоскостям положения соответственно с первого и второго выходов запоминающего устройства 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения поступают соответственно на первый вход блока 8 вычисления параметров линии положения и объединенные второй вход блока 8 вычисления параметров линии положения и третий вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ.
По команде, поступающей с выхода модуля 16 программного управления на управляющий вход блока 8 вычисления параметров линии положения в блоке 8 вычисления параметров линии положения в соответствии с соотношениями (18) и (22)-(26) производится вычисление координат KХm, KYm и KZm m-х векторов Km в нормальной земной подвижной системе координат Σнзпm={Om, X, Y, Z}, находящихся на m-х линиях пересечения несовпадающих пар пересекающихся полуплоскостей положения наземного ИРИ, и координат



Сигналы, соответствующие полученным значениям координат KХm, KYm и KZm m-х векторов Km, с первого выхода блока 8 вычисления параметров линии положения в виде кодированных значений поступают на первый вход запоминающего устройства 9 параметров линий положения.
Сигналы, соответствующие полученным значениям координат



По команде, поступающей с выхода модуля 16 программного управления на управляющий вход запоминающего устройства 9 параметров линий положения сигналы, соответствующие кодированным значениям координат KХm, KYm и KZm m-х векторов Km, и сигналы, соответствующие кодированным значениям координат
По команде, поступающей с выхода модуля 16 программного управления на управляющий вход вычислителя 10 единичной оценки координат наземного ИРИ в вычислителе 10 единичной оценки координат наземного ИРИ с использованием итерационной процедуры поиска точек пересечения линий положения наземного источника радиоизлучения с поверхностью Земли (см. фиг. 5) в соответствии с соотношениями (27), (80)-(84) производится вычисление прямоугольных декартовых координат




Сигналы, соответствующие полученным значениям координат
По команде, поступающей с выхода модуля 16 программного управления на управляющий вход вычислителя 11 дисперсий единичной оценки координат наземного ИРИ в вычислителе 11 дисперсий единичной оценки координат наземного ИРИ в соответствии с соотношениями (33)-(38), (42), (43), (52), (53), (58), (71) и (76) производится вычисление дисперсий







Сигналы, соответствующие полученным значениям дисперсий



По команде, поступающей с выхода модуля 16 программного управления на управляющий вход запоминающего устройства 12 единичных оценок координат наземного ИРИ, сигналы, соответствующие кодированным значениям координат


По команде, поступающей с выхода модуля 16 программного управления на управляющий вход запоминающего устройства 13 дисперсий единичных оценок координат наземного ИРИ, сигналы, соответствующие кодированным значениям дисперсий



По команде, поступающей с выхода модуля 16 программного управления на управляющий вход вычислителя 14 координат наземного ИРИ, в вычислителе 14 координат наземного ИРИ в соответствии с соотношениями (28)-(32) осуществляют выбор координат









Сигнал, соответствующий полученным значениям координат
По команде, поступающей с выхода модуля 16 программного управления на управляющий вход модуля 15 картографирования и индикации, в модуле 15 картографирования и индикации осуществляется картографирование, индикация и регистрация результатов местоопределения наземного ИРИ в виде координат
Специалистам понятно, что варианты реализации различных блоков функциональной схемы устройства (фиг. 1), реализующего заявленный способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, могут иметь различные конструктивные отличия, не являющиеся предметом настоящего изобретения. При этом заявленный способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата достаточно легко реализуем с использованием известных типовых для радиоприемных устройств и устройств с цифровой обработкой сигналов блоки, различные варианты осуществления которых описаны в ряде научно-технических источников информации.
Бортовая пеленгаторная антенна 1 может быть реализована, например, в соответствии с описанием к патенту Российской Федерации №2027261 [17. Пеленгационная антенная система. Патент Российской Федерации №2027261, МПК G01Q 21/24] или в соответствии с описанием к патенту Российской Федерации №2310956 [18. Высоконаправленная кольцевая фазированная антенная решетка. Патент Российской Федерации №2310956, МПК G01Q 21/06, Бюл. №32, опубл. 20.11.2007]. При этом варианты реализации антенных элементов 1.1, 1.2, …, 1.Н бортовой пеленгаторной антенны 1 приведены, например, в работах [19. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. - М. - Л.: Энергия, 1966, с. 108-158]; [20. Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь, 1997, с. 62-65].
Радиоприемный блок 2 может быть реализован по схеме супергетеродинного радиоприемного устройства с преобразованием частоты, с использованием параллельно-последовательного способа обзора рабочего диапазона частот и аналого-цифрового преобразования радиосигналов с получением их спектральных характеристик на основе быстрого преобразования Фурье, что в виде описаний схемо-технических решений изложено, например, в работах [21. Рембовский А.М., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства / Под редакцией А.М. Рембовского. 3-е изд. перераб. и доп. М.: Горячая линия - Телеком. 2012. с. 28-111;], [22. Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь. - 184 с.], [23. Ашихмин А.В. Сергеев В.Б., Сергиенко А.Р. Радиоприемные тракты комплексов автоматизированного радиоконтроля: особенности, решения и перспективы. - Специальная техника, специальный выпуск, 2002, с. 57-64] и [24. Литюк В.И., Литюк Л.В. Методы цифровой многопроцессорной обработки ансамблей радиосигналов. - М.: СОЛОН-ПРЕСС, 2007. - 592 с.]. При этом для осуществления дискретизации сигналов в варианте реализации радиоприемного блока 2 может использоваться 14-ти разрядный аналого-цифровой преобразователь AD6644 фирмы Analog Devices и микросхемы DIGITAL DOWN CONVERTER (DDC) AD6224 фирмы Analog Devices. Для получения спектральных характеристик радиосигналов на основе быстрого преобразования Фурье в варианте реализации радиоприемного блока 2 может использоваться цифровой сигнальный процессор ADSP TS-202 фирмы Analog Devices, который имеет суперскалярную архитектуру, оптимизирован для задач цифровой обработки сигналов и выполняет преобразование Фурье радиосигналов, например, на 1024 точки за 20 мкс.
Вычислитель азимута 3 может быть реализован, например, а соответствии с алгоритмом, приведенным в описании к патенту Российской Федерации №2521959 [25. Амплитудный способ радиопеленгования и радиопеленгатор для его осуществления. Патент РФ на изобретение №2521959, МПК G01S 3/28, G01S 5/04, Бюл. №19, опубл. 10.07.2014] на базе сигнального процессора ADSP TS-201 фирмы Analog Devices.
Блок 4 определения угловой ориентации бортовой пеленгаторной антенны может быть реализован, например, в виде бортовой инерциальной навигационной системы, описание которой приведено в работах [26. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем / Под общей ред. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. - 280 с.], [27. Бромберг. П.В. Теория инерциальных систем навигации. - М.: Наука, 1979. - 291 с.] и [28. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского. - М.: ФИЗМАТ ЛИТ, 2006. - 424 с.], или с использованием устройства МРК-11 [29. Аппаратура МРК-11. Руководство по эксплуатации. УЭ 2.517.006 РЭ. Научно-исследовательский институт радиотехники КГТУ. - Красноярск, 2004].
Необходимо отметить, что в качестве блока 4 определения угловой ориентации бортовой пеленгаторной антенны может использоваться также блок определения угловой ориентации осевых линий ЛА, входящий в состав ЛА, на котором размещена БПА. При этом в качестве значений углов курса, тангажа и крена БПА можно использовать значения углов соответственно курса, тангажа и крена ЛА при условии попарного совпадения положительных направлений продольных, поперечных и нормальных осевых линий БПА и ЛА.
Блок 5 определения координат фазового центра бортовой пеленгаторной антенны может быть реализован, например, в виде спутникового навигатора, описание которого приведено в работах [28], [30. Помыкаев И.И., Селезнев В.Л., Дмитроченко Л.А. Навигационные приборы и системы. - М.: Машиностроение, 1983. - 456 с.] и [31. Спутниковые радионавигационные системы / Под ред. В.С. Шебшаевича..- М.: Радио и связь, 1993. - 272 с.], или с использованием вышеупомянутого устройства МРК-11 [29].
Необходимо отметить, что в качестве блока 5 определения координат фазового центра бортовой пеленгаторной антенны может использоваться также блок определения координат центра масс ЛА, входящий в состав ЛА, на котором размещена БПА. При этом в качестве значений координат xцn, yцn и zцn фазового центра бортовой пеленгаторной антенны в абсолютном большинстве практически важных случаев, определяемых пренебрежимо малыми размерами ЛА относительно расстояний от ЛА до наземного ИРИ, можно использовать значения координат соответственно хЛАn, уЛАn и zЛАn центра масс ЛА, соответствующих n-м отсчетам данных. Вместе с тем, в случае необходимости, как и в аналоге [4], с использованием результатов измерений координат хЛАn, уЛАn и zЛАn центра масс ЛА можно определять вышеупомянутые значения координат хцn, yцn и zцn фазового центра бортовой пеленгаторной антенны в соответствии с соотношениями

где хцсв, хцсв и хцсв - связанные прямоугольные декартовые координаты фазового центра бортовой пеленгаторной антенны относительно центра масс ЛА.
Блок 6 определения полуплоскости положения и формирования нормали к полуплоскости положения, запоминающее устройство 7 параметров единичных векторов азимутальных линий полуплоскостей положения и нормалей к полуплоскостям положения, блок 8 вычисления параметров линии положения, запоминающее устройство 9 параметров линий положения, вычислитель 10 единичной оценки координат наземного ИРИ, вычислитель 11 дисперсий единичной оценки координат наземного ИРИ, запоминающее устройства 12 единичных оценок координат наземного ИРИ, запоминающее устройство 13 дисперсий единичных оценок координат наземного ИРИ, вычислитель 14 координат наземного ИРИ, модуль 15 картографирования и индикации и модуль 16 программного управления могут быть реализованы с использованием схемо-технических решений, изложенных, например, в работах [32. Потехин Д.С., Тарасов И.Е. Разработка систем цифровой обработки сигналов на базе ПЛИС. - М.: Горячая линия - Телеком, 2007.], [33. Сергиенко А.Б. Цифровая обработка сигналов. - СПб.: Питер, 2003. - 608 с.], [34. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп. - М.: Радио и связь, 1990. - 512 с.] и [35. Лебедев О.М. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.], на базе процессоров Texas Instruments TMS 320 С 6416/6713 и программируемых логических интегральных схем фирмы Altera.
Таким образом, при осуществлении предложенного способа определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата за счет определения линий положения наземного источника радиоизлучения в аналитическом виде без использования информации о параметрах поверхности Земли и определения координат наземного источника радиоизлучения как координат точки пересечения линии положения с поверхностью Земли с использованием итерационной процедуры ее поиска, а также - за счет повышения качества выбора независимых пар отсчетов данных и эффективности весовой обработки результатов местоопределения при многократном радиопеленговании с разных точек траектории движения ЛА существенно повышается точность определения координат наземного ИРИ при одновременном снижении вычислительных затрат.
Результаты статистического моделирования показали, что при одинаковых условиях полета ЛА предложенный способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата по сравнению с прототипом [5] обеспечивает повышение точности определения координат наземного источника радиоизлучения не менее чем в 2 раза при одновременном снижении вычислительных затрат от 20% до 70% в зависимости от изрезанности рельефа поверхности Земли.
Наиболее успешно заявленный способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата может быть использован в комплексах радиомониторинга, предназначенных, в том числе, для функционирования в условиях сложного рельефа земной поверхности.
Реферат
Изобретение относится к радиотехнике и может быть использовано для определения координат наземных источников радиоизлучения (ИРИ) при радиопеленговании с борта летательного аппарата (ЛА). Достигаемый технический результат - повышение точности определения координат наземных ИРИ и снижение вычислительных затрат при радиопеленговании с борта ЛА. Указанный результат достигается за счет того, что осуществляют прием радиосигналов бортовой пеленгаторной антенной (БПА), частотную селекцию радиосигналов, определение линий радиопеленгов в азимутальной плоскости БПА, регистрацию полученных данных периодически отсчетами, формирование не менее одной независимой пары пересекающихся полуплоскостей положения наземного ИРИ, ортогональных азимутальной плоскости БПА, проходящих через каждую полученную линию радиопеленга, выбор и весовую обработку пар независимых отсчетов данных, учитывающих зависимости дисперсий оценок координат наземного ИРИ от взаимного расположения в пространстве ЛА и наземного ИРИ. При этом дополнительно введены операции формирования нормалей к полуплоскостям положения наземного ИРИ, определения не менее одной линии положения наземного ИРИ как линии пересечения независимой пары пересекающихся полуплоскостей положения наземного ИРИ, параметры которой определяют из условия ортогональности к вышеупомянутым нормалям, и определения координат наземного ИРИ как точки пересечения линии положения наземного ИРИ с поверхностью Земли с использованием итерационной процедуры ее поиска. Кроме того, при выборе и весовой обработке пар независимых отсчетов данных дополнительно учтены зависимости
Комментарии