Способ обнаружения объектов в активной локации - RU2655664C1
Код документа: RU2655664C1
Чертежи
Описание
Изобретение относится к активной локации, а именно к способам обработки эхосигналов, и может быть использовано в информационно-измерительных системах и системах РЛС, работающих в режимах активного распознавания слабоконтрастных целей с использованием инструментов сверхразрешения на фоне импульсных, широкополосных и распределенных в пространстве помех в радиолокации, гидролокации или других аналогичных системах.
В настоящее время для повышения технических показателей РЛС, работающих в режимах пассивного распознавания слабоконтрастных целей, нередко при цифровой обработке сигналов используют устройства сверхразрешения - Кейпона, Берга, Борджотти-Лагунаса и др., которые позволяют значительно увеличить разрешение станции как по дальности, так и по углу, но из-за необходимости учета параметров исходной посылки реализация указанных алгоритмов при активных режимах работы РЛС весьма затруднительна.
Из уровня техники известна «МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ОБНАРУЖЕНИЯ» по патенту на полезную модель РФ №96664, в которой реализованы операции приема эхосигналов вибраторами активной фазированной антенной решетки, прохождения принятых эхосигналов через антенные переключатели и малошумящие усилители приемо-передающего модуля, оцифровки, а также цифровой обработки сигнальными процессорами, которые формируют диаграммы направленности и выдают необходимую информацию потребителям.
Указанный аналог имеет недостатки, в частности невысокую разрешающую способность, обусловленную невозможностью применения при цифровой обработке сигналов инструментов сверхразрешения как следствие невозможности обработки сигналов от каждого элемента антенны независимо, и невысокую помехоустойчивость, которая обусловлена неоптимальным приемом эхосигналов (отсутствием согласованных с зондирующим сигналом фильтров).
Также из уровня техники известно «УСТРОЙСТВО ПЕЛЕНГАЦИИ МАЛОЗАМЕТНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ» по патенту РФ на изобретение №2343500, в котором реализованы операции приема эхосигналов группами антенн, работающих в азимутальной плоскости, а также группами антенн, работающих в угломестной плоскости, построения двух корреляционных функций сигналов с двух групп антенн, и по указанным функциям определяют азимут и угол места цели.
Приведенному аналогу присущи все вышеуказанные недостатки.
Наиболее близким по технической сущности является изобретение «СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ» по патенту US 6567034, включающий операции приема эхосигналов отдельными элементами антенной решетки, оцифровки и передачи их в блок обработки, реализующий сверхразрешение по ключевым характеристикам эхосигналов, при этом в блоке обработки формируют оценочную ковариационную матрицу цифровых данных, производят разложение сформированной матрицы по собственным векторам, а также преобразуют собственные векторы в соответствии с применяемым инструментом сверхразрешения для определения местоположения объекта.
Недостатком прототипа является невозможность его использования при активной локации, так как он разработан только для пассивной локации, а также неоптимальный прием эхосигналов (отсутствие согласованной фильтрации), которые ограничивают разрешающую способность определения местоположения объекта.
Техническим результатам изобретения является повышение разрешающей способности определения местоположения объектов при активной локации, повышение помехоустойчивости и чувствительности обнаружителя, а также обеспечение возможности применения в активной локации при цифровой обработке сигналов инструментов сверхразрешения по ключевым характеристикам эхосигналов объектов, а именно по дистанции, пеленгу и частоте.
В предлагаемом способе технический результат достигается тем, что после приема эхосигналов отдельными элементами антенной решетки, усиления, фильтрации, оцифровки (предварительная обработка сигнала) сигнал поступает на вход блока согласованной с зондирующим сигналом фильтрации на сигналы от каждого элемента антенной решетки, после чего поступает в блок обработки, реализующий сверхразрешение по ключевым характеристикам эхосигналов.
С выхода блока обработки данные передают в блок обнаружителя, в котором происходит обнаружение цели, или в интерфейс представления данных оператору и/или в различные по назначению автоматизированные системы управления с индикацией ключевых характеристик эхосигналов и объектов.
Новизной изобретения является новая совокупность известных из уровня техники операций, которая позволяет совместить преимущества использования оптимальной фильтрации эхосигналов (согласованный с зондирующим сигналом фильтр) и возможности инструментов сверхразрешения по ключевым характеристикам эхосигналов и объектов.
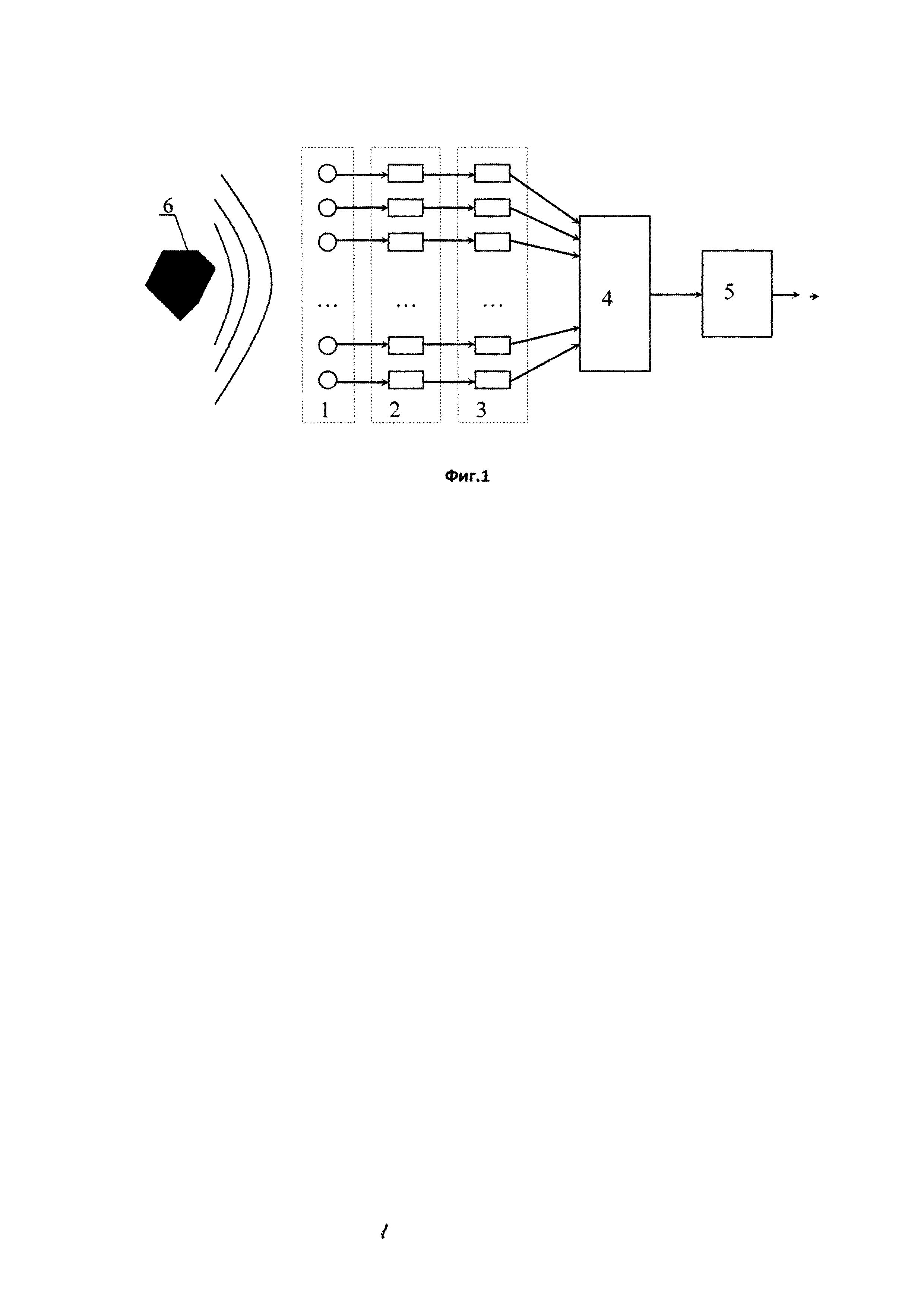
На фиг. 1 представлена блок-схема локатора, реализующего заявляемый способ локации, где 1 - элементы антенной решетки, 2 - блоки предварительной обработки эхосигналов, 3 - согласованные фильтры, 4 - блок обработки, 5 - обнаружитель, 6 - объект локации.
Каждый из блоков предварительной обработки эхосигналов 2 включает последовательно соединенные предварительные полосовые фильтры, усилители и АЦП.
В качестве согласованных фильтров 3 использованы либо линейные оптимальные фильтры, импульсные характеристики которых сформированы исходя из спектральных характеристик зондирующих сигналов, либо корреляционные приемники.
В блоках обработки 4 реализованы инструменты сверхразрешения эхосигналов по их параметрам и ключевым параметрам объектов 6 (частота, скорость, дальность и угол), такие как элементы сверхразрешения Берга, Кейпона, Борджотти-Лагунаса, отношения Рэлея и другие [1, 2].
В блоке обнаружителя 5 реализован критерий оптимального наблюдателя (Байес, Винер, Колмогоров, …), детектор огибающей по каждому наблюдаемому направлению или многомерный энергетический обнаружитель [3].
Локатор работает следующим образом.
Элементы антенной решетки 1 принимают эхосигнал от объекта 6 и передают их в блоки предварительной обработки 2, в которых сигналы усиливают, фильтруют полосовыми фильтрами и оцифровывают АЦП.
Цифровые сигналы с выходов блоков 2 поступают на вход согласованных фильтров 3 по каждому элементу 1 антенной решетки, импульсные характеристики фильтров согласованы со спектральными характеристиками зондирующих сигналов. Сигналы на выходе согласованных фильтров 3 реализуют оптимальное отношение энергии эхосигнала к энергии помех [4].
Результатом работы блоков 4 является пеленгационный рельеф, то есть отношение интенсивности сигнала в зависимости от направления сканирования. Для формирования пеленгационного рельефа инструментами сверхразрешения использовано скользящее окно длительностью, сопоставимой с длительностью эхосигнала. Такой подход позволяет для каждой дистанции сканирования получать свой пеленгационный рельеф, при этом на каждом рельефе будут присутствовать как помехи, так и полезный сигнал. Последовательность пеленгационных рельефов по дистанции сканирования обеспечивает получение трехмерного графика, в качестве осей содержащего углы сканирования, дистанцию сканирования и соответствующую каждой описанной координате точку пеленгационного рельефа, то есть интенсивность приходящего с данного направления и дистанции сигнала.
Критерием для обнаружения сигнала в блоке 5 является поиск ограниченного по времени и обособленного по углу пеленга сигнала. При сложной форме объекта локации 6 отраженный сигнал содержит несколько «бликов», что позволяет определить координаты каждого блика по дистанции и пеленгу, а также геометрию протяженных в пространстве объектов, например, морских надводных или подводных кораблей.
Далее с выхода обнаружителя 5 информацию в виде набора пеленгационных рельефов передают на интерфейс представления информации оператору или в автоматизированные системы управления (на чертеже не указаны), в которых выделяют и представляют первичные локационные параметры объекта 6 - дистанция, пеленг и скорость.
При изменении зондирующего сигнала изменяют импульсные характеристики согласованных фильтров 3, при этом операции по местоопределению объектов 6 повторяют в описанной последовательности.
Таким образом, добавление блока согласованной фильтрации 3 увеличивает отношение сигнал-помеха на входе блоков обработки 4, улучшает разрешающую способность гидролокатора при обнаружении объектов на фоне близко расположенных по пространству помех, а также повышает помехоустойчивость и чувствительность обнаружителя.
Использование согласованных фильтров 3 позволяет в активной локации при цифровой обработке сигналов применять инструменты сверхразрешения по ключевым характеристикам эхосигналов и объектов 6.
Внедрение вышеописанного способа в информационно-измерительные системы может значительно снизить их стоимость благодаря обеспечению возможности использования более простой и дешевой конфигурации антенной решетки при заданных ТТХ обнаружения объектов 6 за счет повышения разрешающей способности, помехоустойчивости и чувствительности.
В нашем техническом решении предлагается сверхразрешение по всем первичным ключевым координатам цели - дистанции, пеленгу и частоте, что достигается проведением дополнительной обработки сигнала, в том числе с использованием пеленгационных рельефов. Из уровня техники известны отдельно методы сверхразрешения по первичным координатам, которые используются в пассивной локации, отдельно известны согласованные с зондирующим сигналом фильтры, которые используются в активной локации, а наше техническое решение предлагает совместить эти решения для получения нового результата - повышение точности определения координат цели в активной локации. Сверхразрешение по углу места и пеленгу является существенным преимуществом перед конкурирующими радиолокационными и гидролокационными станциями и дает дополнительный технический результат в повышении точности определения не только дистанции, но и пеленга и частоты, то есть радиальной скорости объекта.
Источники информации
1. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. - М.: Радио и связь, 2003. - 200 с.
2. Roy R., Kailath Т. ESPRIT - estimation of signal parameters via rotational invariance techniques. "IEEE Trans. Acoust., Speech and Signal Process." 1989, Vol. 37, No. 7.
3. Малышкин Г.С. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. Оптимальные методы. - СПб.: Электроприбор, 2009. - 400 с.
4. Мюнье Ж., Делиль Ж.Ю. Пространственный анализ в пассивных локационных системах с помощью адаптивных методов. //ТИИЭР, 1987, т. 75, №11.
Реферат
Изобретение относится к активной локации, а именно к способам обработки эхосигналов с использованием инструментов сверхразрешения для применения в информационно-измерительных системах, основанных на обработке отраженного от объекта локации сигналов, то есть акустической локации и гидролокации, работающих в режимах активного распознавания слабоконтрастных целей. Техническим результатом предлагаемого изобретения является повышение помехоустойчивости. Указанный результат достигается тем, что способ реализуется операциями приема эхосигналов отдельными элементами антенной решетки, предварительным их усилением, фильтрацией и оцифровкой, после чего цифровые сигналы фильтруют согласованными с формой зондирующих сигналов фильтрами и передают их в блоки обработки, обеспечивающие сверхразрешение по ключевым характеристикам эхосигналов и объектов, таких как частота, дальность, скорость и пеленг. 1 ил.
Комментарии