Адаптивный многотопливный двигатель внутреннего сгорания - RU2114315C1
Код документа: RU2114315C1
Чертежи






Описание
Изобретение относится к машиностроению, в частности к двигателестроению, а именно, к двигателям внутреннего сгорания, приспособленным для работы на различных видах топлива с возможностью регулирования степени сжатия и рабочего объема путем изменения хода поршня.
Известен адаптивный многотопливный двигатель внутреннего сгорания, содержащий корпус, цилиндры с крышками, поршни, размещенные в цилиндрах, коленчатый вал, шатуны, состоящие из двух шарнирно соединенных между собой частей, одна из которых связана с поршнем, а другая - с кривошипом коленчатого вала, рычаги, каждый из которых соединен с шарниром шатуна, приводные механизмы изменения степени сжатия и рабочего объема в каждом цилиндре, связанные с осями качания рычагов с возможностью перемещения их осей качания, системы топливоподачи, смазки и охлаждения двигателя и орган управления двигателем (заявка ФРГ N 3107244, кл. F 01 D 15/02, 1982).
Однако известный двигатель характеризуется недостаточно эффективной работой механизма управления степенью сжатия и рабочего объема, не обеспечивающего возможность автоматического регулирования нагрузки. Кроме того, в этом двигателе не предусмотрена возможность регулирования мощности путем включения - отключения из работы групп цилиндров двигателя.
Задачей изобретения является повышение эффективности работы двигателя за счет автоматического регулирования степени сжатия и рабочего объема путем изменения хода поршня, а также автоматического регулирования числа работающих цилиндров при изменении нагрузки.
Поставленная задача решается тем, что адаптивный многотопливный двигатель внутреннего сгорания, содержащий корпус, цилиндры с крышками, поршни, размещенные в цилиндрах, коленчатый вал, шатуны, состоящие из двух шарнирно соединенных между собой частей, одна из которых связана с поршнем, а другая - с кривошипом коленчатого вала, рычаги, каждый из которых соединен с шарниром шатуна, приводные механизмы изменения степени сжатия и рабочего объема в каждом цилиндре, связанные с осями качания рычагов с возможностью перемещения их осей качания, системы топливоподачи, смазки и охлаждения двигателя и орган управления двигателем, согласно изобретению выполнен по меньшей мере из двух модулей и снабжен главным микропроцессором, входы которого связаны с контроллером органа управления и датчиком числа оборотов вала двигателя, а выходы - с механизмами включения-отключения модулей, каждый модуль снабжен вспомогательным микропроцессором, входы которого связаны с выходами главного микропроцессора, детонационными датчиками, датчиками определения верхних и нижних мертвых точек поршней, а выходы - с приводным механизмом изменения степени сжатия и рабочего объема, имеющим реверсивный элемент, и с топливодозирующими устройствами системы топливоподачи, причем реверсивные элементы соединены с осями качания рычагов и выполнены с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном продольным осям цилиндров.
Поставленная задача решается также тем, что каждый модуль может содержать два цилиндра и два кривошипа с автономно работающими участками систем топливоподачи, смазки и охлаждения, причем механизмы включения-отключения модулей могут быть выполнены в виде гидромуфт с электроприводами управления, которые связаны с выходами главного микропроцессора.
Поставленная задача решается также тем, что каждый модуль может быть снабжен индивидуальным картером с маслом, а автономные участки системы смазки модулей сообщены один с другим циркуляционными контурами, включающими в себя масляные насосы.
Также задача решается тем, что автономные участки системы охлаждения модулей снабжены датчиками температуры охлаждающей жидкости и объединены в циркуляционный контур, включающий в себя радиатор, термостат и вентилятор, причем датчики температуры связаны с входом главного микропроцессора, а электроприводы термостата и вентилятора подсоединены к выходам последнего.
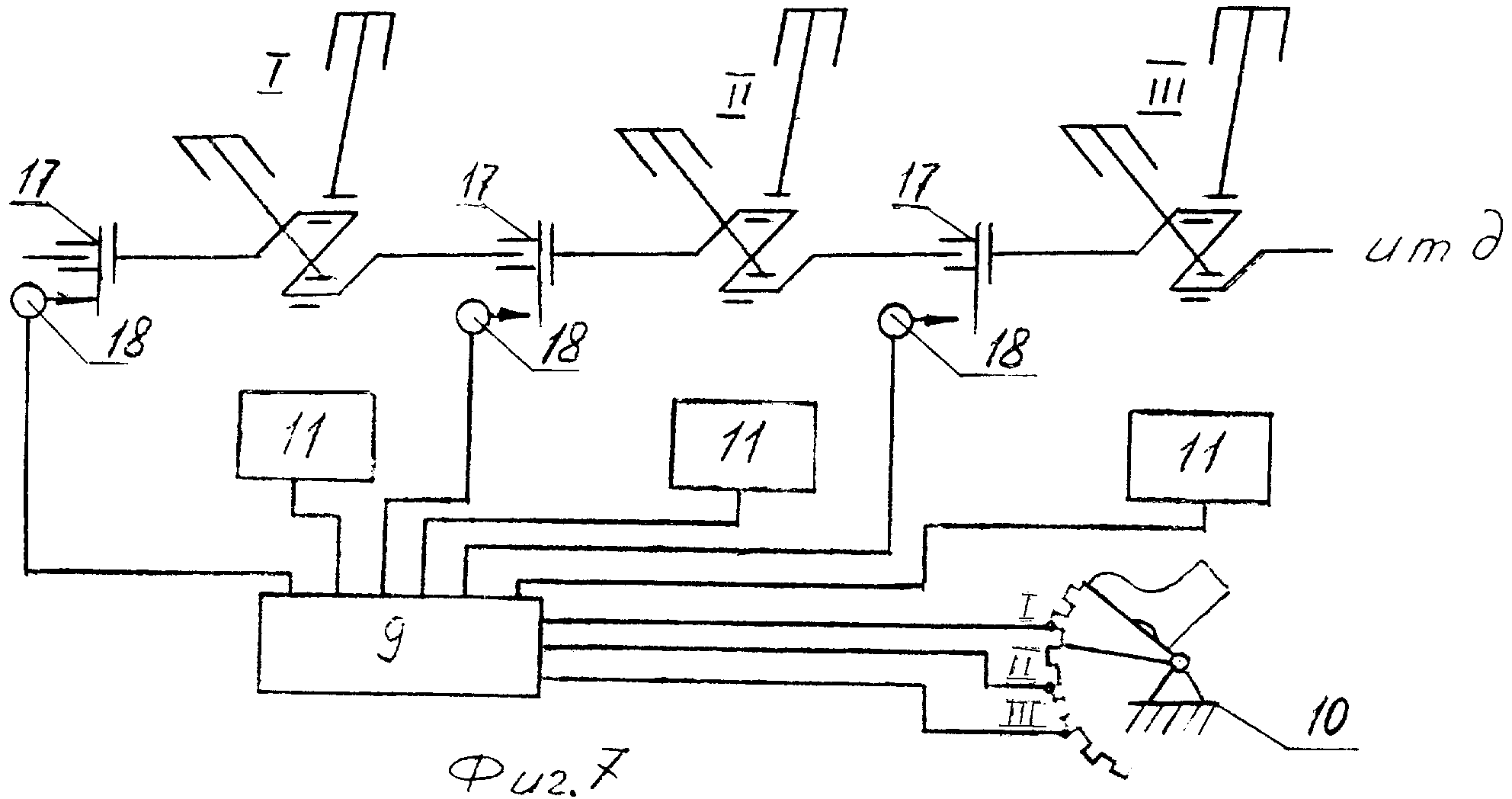
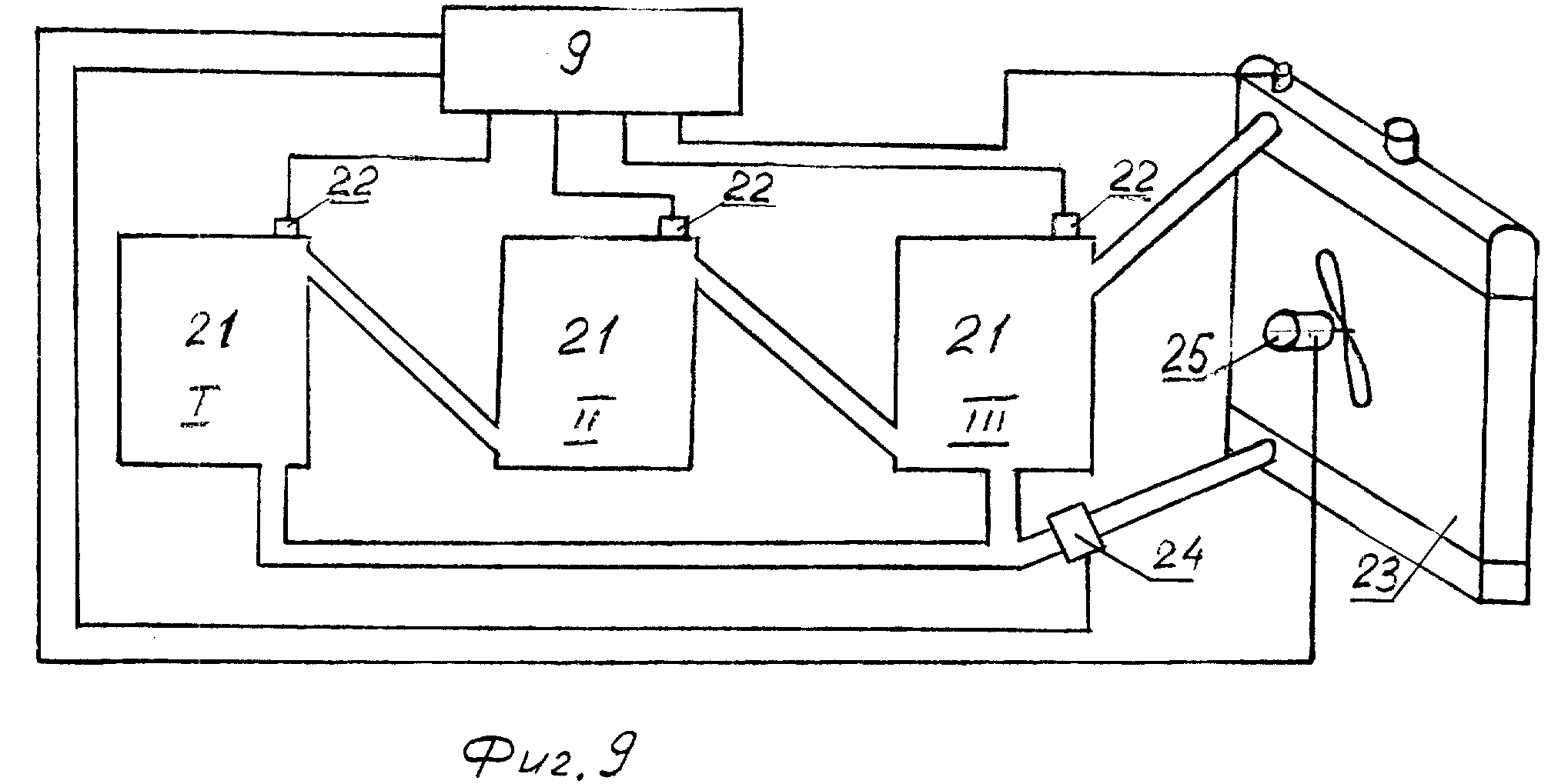
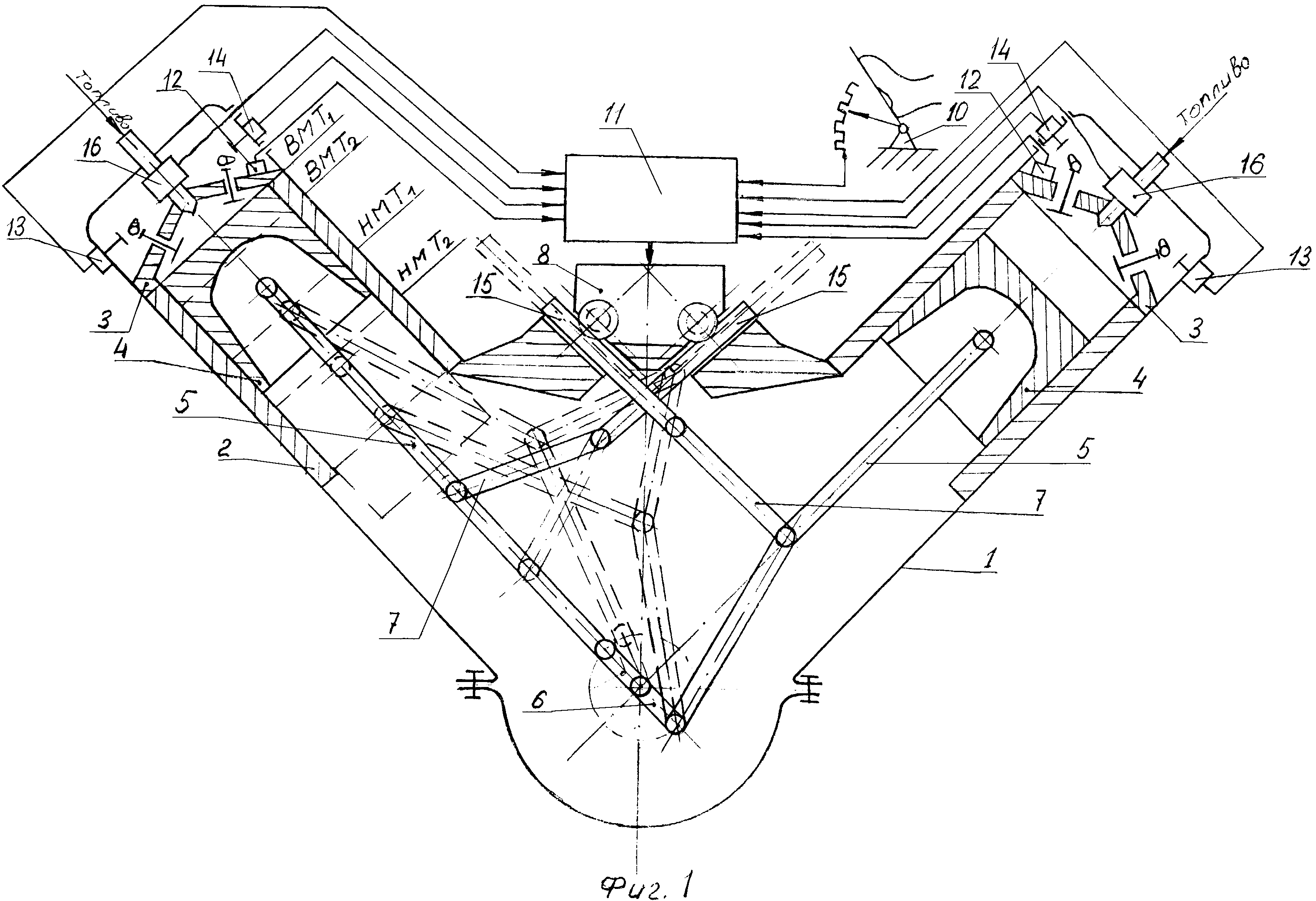
На фиг. 1 представлен поперечный разрез двухцилиндрового модуля предлагаемого двигателя; на фиг. 2 - кинематическая схема двигателя при положении поршня в верхней мертвой точке и совпадении осевых линий поршня, сочлененного шатуна и кривошипа коленчатого вала; на фиг. 3 - кинематическая схема двигателя при положении поршня в нижней мертвой точке и крайнем правом положении реверсивного элемента; на фиг. 4 - схема расположения звеньев кинематической цепи двигателя при положении поршня в верхней мертвой точке и совпадении осевых линий поршня, сочлененного шатуна и кривошипа коленчатого вала; на фиг. 5 - схема расположения звеньев кинематической цепи двигателя при положении поршня в верхней мертвой точке и крайнем правом положении реверсивного элемента; на фиг. 6 - схема расположения звеньев кинематической цепи двигателя при положении поршня в нижней мертвой точке и крайнем правом положении реверсивного элемента; на фиг. 7 - кинематическая схема соединения модулей двигателя; на фиг. 8 - гидравлическая схема системы смазки двигателя; на фиг. 9 - гидравлическая схема системы охлаждения двигателя.
Адаптивный многотопливный двигатель внутреннего сгорания содержит корпус 1, цилиндры 2 с крышками 3, поршни 4, размещенные в цилиндрах 2, и шатуны 5, состоящие из двух шарнирно соединенных между собой частей, одна из которых связана с поршнем 4, а другая - с кривошипом 6 коленчатого вала. Имеются рычаги 7, каждый из которых соединен с шарниром шатуна 5, и приводные механизмы изменения степени сжатия и рабочего объема, связанные с осями качания рычагов 7 с возможностью перемещения их осей качания. При этом двигатель выполнен по меньшей мере из двух модулей и снабжен главным микропроцессором 9, входы которого связаны с контроллером 10 органа управления (например, педали акселератора) и датчиком числа оборотов вала двигателя, а выходы - с механизмами включения-отключения модулей. Каждый модуль снабжен вспомогательным микропроцессором 11, входы которого связаны с выходами главного микропроцессора 9, детонационными датчиками 12, датчиками 13,14 определения верхних мертвых точек (ВМТ) и нижних мертвых точек (НМТ) поршней 4, а выходы - с приводным механизмом 8 изменения степени сжатия и рабочего объема, имеющим реверсивный элемент 15, и с топливодозирующими устройствами, например, с электроприводом насос-форсунок 16 системы топливоподачи. Реверсивные элементы 15 соединены с осями качания рычагов 7 и выполнены с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном продольным осям цилиндров 2. Датчики 13 определения ВМТ одновременно могут быть использованы и в качестве датчиков числа оборотов. Кроме того, двигатель содержит системы смазки и охлаждения.
Каждый модуль содержит два цилиндра 2 и два кривошипа 6 с автономно работающими участками систем топливоподачи, смазки и охлаждения. Механизмы включения-отключения модулей выполнены в виде гидромуфт 17 с электроприводами 18 управления, которые связаны с выходами главного микропроцессора 9. Кроме того, каждый модуль снабжен индивидуальным картером 19 с маслом, а автономные участки системы смазки модулей сообщены один с другим циркуляционными контурами, включающими в себя масляные насосы 20.
Автономные участки 21 системы охлаждения модулей снабжены датчиками 22 температуры охлаждающей жидкости и объединены в циркуляционный контур, включающий в себя радиатор 23, термостат 24 и вентилятор 25. Датчики 22 температуры связаны с входом главного микропроцессора 9, а электроприводы термостата 24 и вентилятора 25 подсоединены к выходам последнего.
Адаптивный многотопливный модульный двигатель внутреннего сгорания работает следующим образом.
Для адаптации (приспосабливания) двигателя к потребляемому виду топлива детонационный датчик 12 подает сигнал о начале горения топлива во вспомогательный микропроцессор 11 работающего модуля. Микропроцессор 11 замеряет, на сколько градусов поворота вала раньше ВМТ произошло горение, затем производит расчет оптимальной степени сжатия для этого вида топлива. В микропроцессоре 11 заложена информация об эталонных значениях степеней сжатия для основных видов топлива - дизельного, керосина, основных марок бензина и их смесей. Микропроцессор 11, сравнивая угол опережения воспламенения используемого вида топлива с эталонным, определяет величину необходимой степени сжатия. Далее микропроцессор 11 по величине найденной степени степени сжатия определяет разницу между положениями ВМТ1 и ВМТ2 (т.е. разницу между фактическим и оптимальным положениями поршня в ВМТ), оптимальную цикловую подачу для этого вида топлива, а также соответствующий угол опережения впрыска топлива. Определив разницу между положениями ВМТ1 и ВМТ2, микропроцессор 11 во время такта сжатия в цилиндре 2 подает сигнал приводному механизму 8 передвинуть реверсивный элемент 15 из крайнего левого положения (точка а) в крайнее правое положение (точка в), обеспечивая оптимальную степень сжатия для данного вида топлива (фиг.4,5). Изменение положения ВМТ1 поршня 4 на ВМТ2 происходит следующим образом. Когда реверсивный элемент 15 находится в точке а (фиг.4), осевая линия сочлененного шатуна 5 совпадает с продольной осью цилиндра 2, и кривошипно-шатунный механизм модуля работает так же, как и обычный тронковый кривошипно-шатунный механизм. При этом рычаг 7 совершает качательное движение относительно своей оси качания, а ход поршня 4 и его положения ВМТ и НМТ остаются неизменными. При переводе реверсивного элемента 15, а, следовательно, и оси качания рычага 7 в точку в по сигналу микропроцессора 11 рычаг 7 сместит шарнир шатуна 5 вправо от продольной оси цилиндра 2, в результате чего положение ВМТ поршня 4 сместится из ВМТ1 в ВМТ2 (фиг. 5). Причем приводной механизм 8 по команде микропроцессора 11 на других тактах работы двигателя (выпуск и впуск) может восстановить прежнее положение ВМТ поршня 4.
Адаптация (приспосабливание) описываемого двигателя к меняющейся в процессе его эксплуатации нагрузке происходит следующим образом. При увеличении нагрузки на двигатель перемещают орган управления двигателем, например, педаль акселератора. При этом сигнал с контроллера 10 поступает в главный микропроцессор 9, а затем во вспомогательный микропроцессор 11 работающего модуля, который определяет оптимальную величину увеличения цикловой подачи топлива. Таким образом, происходит увеличение числа оборотов вала двигателя до максимума. Если при этом выходной мощности двигателя будет недостаточно для преодоления увеличивающейся нагрузки, дальнейшее увеличение мощности будет осуществляться за счет увеличения рабочего объема цилиндров (литража модуля). Вспомогательный микропроцессор 11, выбрав мощность за счет увеличения числа оборотов вала от увеличения цикловой подачи топлива, например насос-форсункой 16, подает сигнал на приводной механизм 8, который на такте впуска рабочего заряда и такте рабочего хода перемещает реверсивный элемент 15 из точки а в точку с (фиг.3,6). При этом рычаг 7 сместит положение НМТ поршня 4 в положение НМТ2, увеличивая тем самым рабочий объем модуля и выходную мощность двигателя, и наоборот, при перемещении реверсивного элемента 15 из точки с в точку а произойдет смещение положения НМТ в положение НМТ1. Для улучшения очистки цилиндров модуля от продуктов сгорания на такте выпуска реверсивный элемент 15 возвращается в точку а, смещая положение ВМТ поршня 4 в положение ВМТ1. При дальнейшем росте нагрузки главный микропроцессор 9 включает в работу второй модуль, подав сигнал на электропривод 18 управления гидромуфт 17, а при необходимости и следующий модуль. При этом в главный микропроцессор 9 может быть заложена информация об очередности включения модулей в работу для обеспечения плавной работы двигателя. Для повышения надежности включения модулей в работу в главный микропроцессор 9 заложены программы управления автономными участками системы охлаждения, обеспечивающие прогрев неработающих модулей за счет отходящего тепла работающего модуля. Радиатор 23 включается в работу только тогда, когда работают все модули на полную мощность. В этом случае по сигналу датчиков 22 температуры охлаждающей жидкости термостат 24 включает в работу радиатор 23. Прогрев неработающих модулей также может осуществляться путем перекачки масла насосами 20 из работающего модуля в неработающие.
Таким образом, обеспечивается адаптация двигателя к любому используемому виду топлива и изменяющейся нагрузке.
Реферат
Двигатель внутреннего сгорания способен адаптироваться к работе на различных видах топлива и изменяющейся в процессе его эксплуатации нагрузке. Двигатель состоит из нескольких автономно работающих модулей, число которых может изменяться в зависимости от величины нагрузки, и снабжен главным микропроцессором, входы которого связаны с контроллером органа управления и датчиком числа оборотов вала двигателя, а выходы -с механизмами включения - отключения модулей. Каждый модуль снабжен вспомогательным микропроцессором, входы которого связаны с выходами главного микропроцессора, детонационными датчиками, датчиками определения верхних и нижних мертвых точек поршней, а выходы - с приводным механизмом изменения степени сжатия и рабочего объема, имеющим реверсивный элемент, и с топливодозирующими устройствами системы топливоподачи, причем реверсивные элементы соединены с осями качания рычагов, каждый из которых соединен с шарниром сочлененного шатуна, и выполнены с возможностью возвратно-поступательного перемещения. Технический результат заключается в повышении эффективности работы двигателя за счет автоматического регулирования степени сжатия рабочего объема цилиндров и числа работающих цилиндров. 3 з.п.ф-лы, 9 ил.
Комментарии