Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления - RU2667485C1
Код документа: RU2667485C1
Чертежи

Описание
Заявляемые технические решения относятся к области радиолокации и могут быть использованы для обнаружения цели в условиях действия пассивных помех.
Задача радиолокационной станции (РЛС) состоит в обнаружении цели -факта ее наличия в осматриваемом направлении и определении ее местоположения (ее угловые координаты и дальность); кроме того, в большинстве случаев важно определить ее скорость не только для прогнозирования трассы в процессе сопровождения, но и для выделения подвижной цели на фоне пассивных помех.
Пассивная помеха может создаваться при наличии в окрестностях позиции комплекса высотных зданий, гор и холмов или при плохих метеоусловиях - дождь, снег, облачность. Наибольшую опасность для РЛС составляет искусственно созданная помеха в виде рассеянных в атмосфере металлизированных отражателей. Такая помеха ставится для прикрытия налета групповых или одиночных целей. Плотность такой помехи определяется количеством пачек на сто метров пути и может изменяться, создавая нужную интенсивность отраженного сигнала. Одним из основных способов защиты от пассивных помех является использование разницы в спектрах сигналов, отраженных от пассивной помехи и от подвижной цели за счет эффекта Доплера. Но необходимо учитывать особенности функции неопределенности различных сигналов.
Как известно, в радиолокации действует принцип неопределенности, состоящий в том, что повышение точности определения дальности уменьшает точность определения скорости [Д.Е. Вакман - Сложные сигналы и принцип неопределенности в радиолокации. «Сов. рад.» 1965 г., с. 65, второй абзац снизу]. Так, например, для точного определения дальности необходимо использовать широкополосные сигналы. При этом сечение тела функции неопределенности такого сигнала локализовано по оси времени (дальности), но «размазано» по оси скорости. В то же время использование протяженных во времени сигналов позволяет с большей точностью определять скорость цели, так как сечение функции неопределенности такого сигнала локализовано по оси скорости и «размазано» по оси времени (дальности) [там же, с. 57, рис. 16], поэтому невозможно за счет использования одного зондирующего сигнала обеспечить разрешение по дальности и по скорости (измерить координаты цели - дальность и скорость с требуемой точностью).
В современных условиях предполагается массированный налет высокоскоростных целей, обнаружение и сопровождение которых привело к необходимости сокращения времени обзора контролируемого пространства, к увеличению скорости сканирования лучом антенны. Поэтому были разработаны РЛС с фазированными антенными решетками (ФАР). ФАР в коротковолновых РЛС формирует диаграмму направленности антенны (ДНА) карандашного типа и обеспечивает одновременное определение угловых координат цели.
Однако количество направлений, которые необходимо осматривать такой ФАР резко возрастает. Возрастает и время, необходимое для осмотра этих направлений, особенно при осмотре больших дальностей (работа с большими периодами повторения зонда). А в случае необходимости многократного зондирования одного направления - это приводит к увеличению времени наблюдения и возникновению проблемы импульсного «голода» [Справочник по радиолокации, под ред. М. Сколника, том 4, «Сов. радио», 1978 г., с. 50, 4 й абзац сверху]. Многократное зондирование необходимо для селекции по скорости движущейся цели в пассивных помехах. [Справочник по радиолокации. Под ред. М. Сколника, том 3, «Сов. радио», 1979 г., с. 281, РЛС с селекцией движущихся целей]. Причем, для исключения слепых скоростей необходимо не менее, чем трехкратное зондирование с переменным периодом зондирования в каждом направлении [там же, с. 319], в том числе и направлениях, где отсутствуют цели (пустые направления) поскольку решение об их отсутствии может быть принято лишь после выполнения селекции.
Сократить затраты времени (энергии) на осмотр «пустых» направлений возможно, если использовать узкополосный - протяженный во времени сигнал, позволяющий в одном периоде зондирования обнаружить признаки движущейся цели (без определения дальности, это означает, что обнаружена не цель, а ее признаки). Но их применение возможно лишь в разнесенных РЛС [М. Скольник - Справочник по радиолокации т. 4, с. 193, 2й абзац], поскольку при использовании общей антенны на прием и передачу из-за воздействия зондирующего сигнала на приемник, возникает «мертвая» зона РЛС, по протяженности соответствующая длительности зондирующего сигнала.
Наиболее близким к заявляемому способу является способ радиолокационного обзора пространства, основанный на взаимодействии радиолокационных станций, входящих в многопозиционный комплекс и заключающийся в подсветке пространства с помощью m≥1 передающих модулей (ПМ), приеме отраженных сигналов с помощью n≥2 приемных модулей (ПрМ) и определении пеленгов на цель, измерении их координат [Кондратьев B.C. и др. Многопозиционные радиотехнические системы. М. Радио и связь, 1986 г., с. 14, стр. 15].
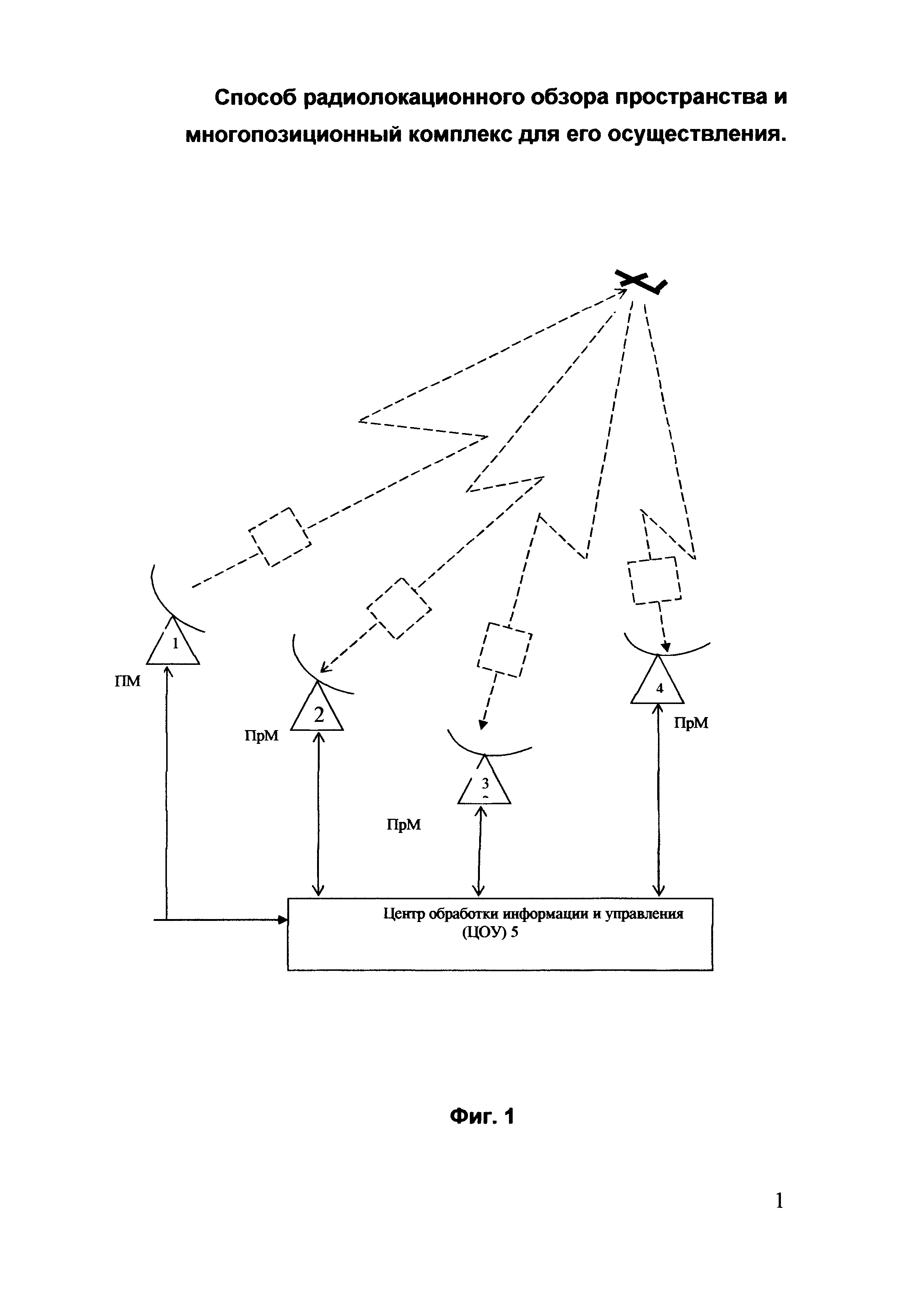
Наиболее близким к заявляемому комплексу является комплекс (фиг. 1) для осуществления способа, содержащий передающий модуль (ПМ) 1, и несколько приемных модулей (ПрМ)-2,3,4 для приема отраженного сигнала, и центр обработки информации и управления (ЦОУ) 5, входы - выходы всех модулей соединены с соответствующими выходами-входами центра обработки информации 5 (там же).
Суть работы этого способа и комплекса, содержащего разнесенные в пространстве передающий модуль ПМ и нескольких приемных модулей ПрМ, заключается в том, что излученные ПМ зондирующие сигналы, отражаются от цели в разных направлениях и принимаются всеми приемными модулями и поступают на центр обработки и управления (ЦОУ) 5, где происходит вычисление координат цели. Для вычислений используют разницу во времени приема отраженного от цели сигнала каждым приемным модулем относительно момента излучения зондирующего сигнала ПМ. Работа всех модулей происходит в едином времени.
Преимуществом такого способа и комплекса обнаружения является повышение достоверности определения координат целей за счет совместной обработки данных всех модулей.
Недостаток этого способа и комплекса состоит в том, что он теряет свои преимущества при работе в условиях действия интенсивных пассивных помех. Как указывалось выше, для обнаружения движущейся цели в условиях действия пассивных помех необходимо не менее чем трехкратное ее зондирование.
Это приводит к тому, что во всех направлениях, в которых действует указанная помеха, в том числе и «пустых», необходимо затрачивать как минимум три периода зондирования. Это значительно увеличивает временные затраты на осмотр направлений пораженных пассивной помехой.
Таким образом, поставленной технической проблемой (техническим результатом) заявляемого изобретения является сокращение затрат времени (энергии) на обнаружение цели в зоне действия пассивных помех многопозиционным комплексом радиолокационных станций.
Решение технической проблемы (технического результата) достигается тем, что затрачивают энергию на определение местоположения цели (дальности) в зоне действия пассивной помехи только в случае наличия в ней признаков движущейся цели, для обнаружения которых используют лишь один период зондирования.
Поставленная техническая проблема (технический результат) решается тем, что в способе радиолокационного обзора пространства, заключающемся в подсветке пространства с помощью m≥2 передающих модулей, приеме отраженных сигналов с помощью n≥2 приемных модулей, определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), согласно изобретению обзор пространства осуществляют с помощью узкополосных ПМу и ПрМу, при обнаружении признаков движущейся цели определяют пеленг на нее, измеряют ее доплеровскую скорость, передают информацию на ЦОУ, с помощью широкополосных ПМш и ПрМш, по данным ЦОУ осматривают пеленги и обнаруживают цель.
Поставленная техническая проблема (технический результат) решается тем, что в многопозиционном комплексе для осуществления способа радиолокационного обзора пространства, состоящем из m≥2 передающих модулей (ПМ), n≥2 приемных модулей (ПрМ) и центра обработки информации и управления (ЦОУ), входы - выходы ПМ и ПрМ связаны с соответствующими выходами - входами ЦОУ, согласно изобретению u
Поставленная техническая проблема (технический результат) решается так же тем, что в многопозиционном комплексе для осуществления способа радиолокационного обзора пространства согласно изобретению ПМ размещают на близких позициях с ПрМ, обеспечивающих совмещение угловых секторов осмотра ПрМ и ПМ.
Суть предлагаемого способа заключается в том, что используют свойство функции неопределенности в радиолокации для локализации ее сечения на оси скоростей и обнаружении при этом наличия признаков движущейся цели без определения дальности. С этой целью применяют узкополосный, протяженный во времени, немодулированный сигнал, а при обнаружении факта наличия движущейся цели (обнаружении доплеровского сдвига частоты сигнала в доплеровском фильтре [Радиотехнические системы. В.Н. Тяпкин и др. изд. СФУ, УДК 621.396.96, с. 38]) в этом направлении применяют широкополосный сигнал (например, с внутриимпульсной модуляцией). С помощью узкополосного сигнала обнаруживают лишь признаки наличия движущейся цели. Для обнаружения цели необходимо определить все ее координаты, т.е. еще и дальность. При этом решается задача уменьшения времени обзора за счет исключения затрат времени (энергии) на осмотр с помощью широкополосных модулей ПМш и ПрМш направлений, не содержащих признаков движущейся цели. Это существенно сокращает время обзора. Информация, поступающая от всех модулей, обрабатывается в ЦОУ, где вычисляют координаты цели и определяют ее доплеровскую скорость, а также определяют «пустые» направления и формируют сигнал управления соответствующими ПМш и ПрМш. ПМ размещают на близких позициях с ПрМ, обеспечивающих совмещение угловых секторов осмотра ПрМ и ПМ.
Изобретение иллюстрируется чертежами Фиг. 1 и Фиг. 2.
На фиг. 1 показано расположение приемных и передающих модулей в комплексе - прототипе.
На фиг. 2 показано расположение приемных и передающих модулей в заявляемом комплексе.
Заявленный многопозиционный комплекс, содержащий разнесенные в пространстве широкополосные модули ПМш 1 и ПрМш 6, узкополосные модули ПМу 7 и ПрМу 8 и центр обработки информации и управления ЦОУ 5, входы-выходы ПМш 1 и ПрМш 6, ПМу 7 и ПрМу 8 соединены с соответствующими выходами - входами центра обработки информации и управления ЦОУ 5. ПМ и ПрМ располагают на близких позициях, обеспечивающих совмещение угловых секторов осмотра ПрМ и ПМ.
Рассмотрим более подробно осуществимость способа и комплекса (фиг. 2). ПМу 7 излучает узкополосные (длинные) сигналы, а ПрМу 8 принимает отраженные от цели эти сигналы с доплеровским сдвигом частоты. При этом определяют доплеровскую скорость цели с помощью доплеровских фильтров и фиксируют ее пеленг. Эта информация поступает в центр обработки информации и управления ЦОУ 5, который передает эту информацию на ПМш 1, и он излучает широкополосные сигналы, а ПрМш 6 принимает отраженные от цели сигналы. При этом определяют однозначно дальность до цели. Вся информация поступает в центр обработки информации 5, где в процессе обзора определяют пеленги и дальности на скоростные цели и определяют направления, в которых нет подвижных целей. В этих направлениях ПМш1 не излучает широкополосные сигналы.
Благодаря этому процесс обзора пространства ускоряется в зоне действия пассивных помех.
Таким образом, использование разнесенных передающих и приемных пунктов позволяет применять узкополосные - протяженные во времени зондирующие сигналы в результате чего при затратах одного периода зондирования (вместо не менее, чем трех) оказалось возможным обнаружить признаки движущейся цели в условиях действия пассивных помех и исключить затраты времени (энергии) на обнаружение цели (измерение дальности) в направлениях, где эти признаки не обнаружены, чем и решается поставленная техническая проблема и достигается технический результат.
Реферат
Изобретения относятся к области радиолокации и могут быть использованы для обнаружения цели в условиях действия пассивных помех. Достигаемый технический результат - сокращение затрат времени (энергии) на обнаружение цели в зоне действия пассивных помех многопозиционным комплексом радиолокационных станций. Указанный результат достигается тем, что в способе радиолокационного обзора пространства, заключающемся в подсветке пространства с помощью m≥2 передающих модулей (ПМ), приеме отраженных сигналов с помощью n≥2 приемных модулей (ПрМ), определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), обзор пространства осуществляют с помощью узкополосных ПМи ПрМ, при обнаружении признаков движущейся цели определяют пеленг на нее, измеряют ее доплеровскую скорость, передают информацию на ЦОУ, с помощью широкополосных ПМи ПрМи по данным ЦОУ осматривают пеленги и обнаруживают цель. Указанный технический результат достигается также тем, что в многопозиционном комплексе для осуществления способа радиолокационного обзора пространства, содержащем m≥2 передающих модулей (ПМ), n≥2 приемных модулей (ПрМ) и центр обработки информации и управления (ЦОУ), входы-выходы ПМ и ПрМ соединены с соответствующими выходами-входами ЦОУ, при этом часть из m ПМи часть из n ПрМкомплекса выполнены узкополосными, а остальные ПМи ПрМ- широкополосными. Указанный результат достигается также тем, что в многопозиционном комплексе для осуществления способа радиолокационного обзора пространства ПМ размещают на близких позициях с ПрМ, обеспечивающих совмещение угловых секторов осмотра ПрМ и ПМ. 2 н. и 1 з.п ф-лы, 2 ил.
Комментарии