Активный малобазовый корреляционно-фазовый пеленгатор - RU2740779C1
Код документа: RU2740779C1
Чертежи
Описание
Изобретение относится к радиолокации и может быть использовано для определения текущего местоположения и траектории движения летательных объектов.
Известны фазовые пеленгаторы и радиодальномеры (Космические траекторные измерения. Под общей редакцией П.А. Агаджанова и др. - М.: Сов. Радио, 1969, гл. 7, 5, Мониторинг космических аппаратов на основе применения корреляционно-фазовых пеленгаторов. Под общей редакцией А.С. Чеботарева и др. - М.: ФИЗМАТ ЛИТ, 2011, гл. 1.4, 1.3).
Известен радиодальномер (Мониторинг космических аппаратов на основе применения корреляционно-фазовых пеленгаторов. Под общей редакцией А.С. Чеботарева и др. - М.: ФИЗМАТ ЛИТ, 2011, стр. 29-31, рис. 1.2), содержащий антенну и последовательно соединенные с ней блок приемопередачи и блок измерения дальности.
Радиодальномер измеряет расстояние до летательного объекта, но не измеряет угловые координаты летательного объекта, т.е. не позволяет определить местоположение этого объекта.
Известен корреляционно-фазовый пеленгатор (патент РФ №2631422, 2017) выбранный в качестве прототипа, содержащий пять антенн, расположенных по сторонам прямого угла, причем третья антенна расположена в вершине этого угла, последовательно соединенные с ними пять приемников, гетеродин, выход которого соединен со вторыми входами приемников, четыре цифровых коррелятора, первые входы которых соединены с выходами первого, второго, четвертого и пятого приемников соответственно, а вторые входы соединены с выходом третьего приемника и вычислитель, входы которого соединены с выходами четырех цифровых корреляторов соответственно. Прототип измеряет угловые координаты летательного объекта, но не измеряет расстояние до этого объекта, т.е. не позволяет определить его местоположение. При этом размеры антенн прототипа ограничены малой базой пеленгатора, вопросами калибровки в ближней зоне и затенения антенн на определенных углах пеленга.
Признаки изобретения, совпадающие с признаками прототипа, пять антенн, расположенных по сторонам прямого угла, пять приемников, гетеродин, четыре цифровых коррелятора и вычислитель.
Изобретение - активный малобазовый корреляционно-фазовый пеленгатор решает задачу измерения координат летательных объектов и повышение точности этих измерений.
Технический результат - изобретение обеспечивает определение текущего местоположения и траектории движения летательных объектов с повышенной точностью.
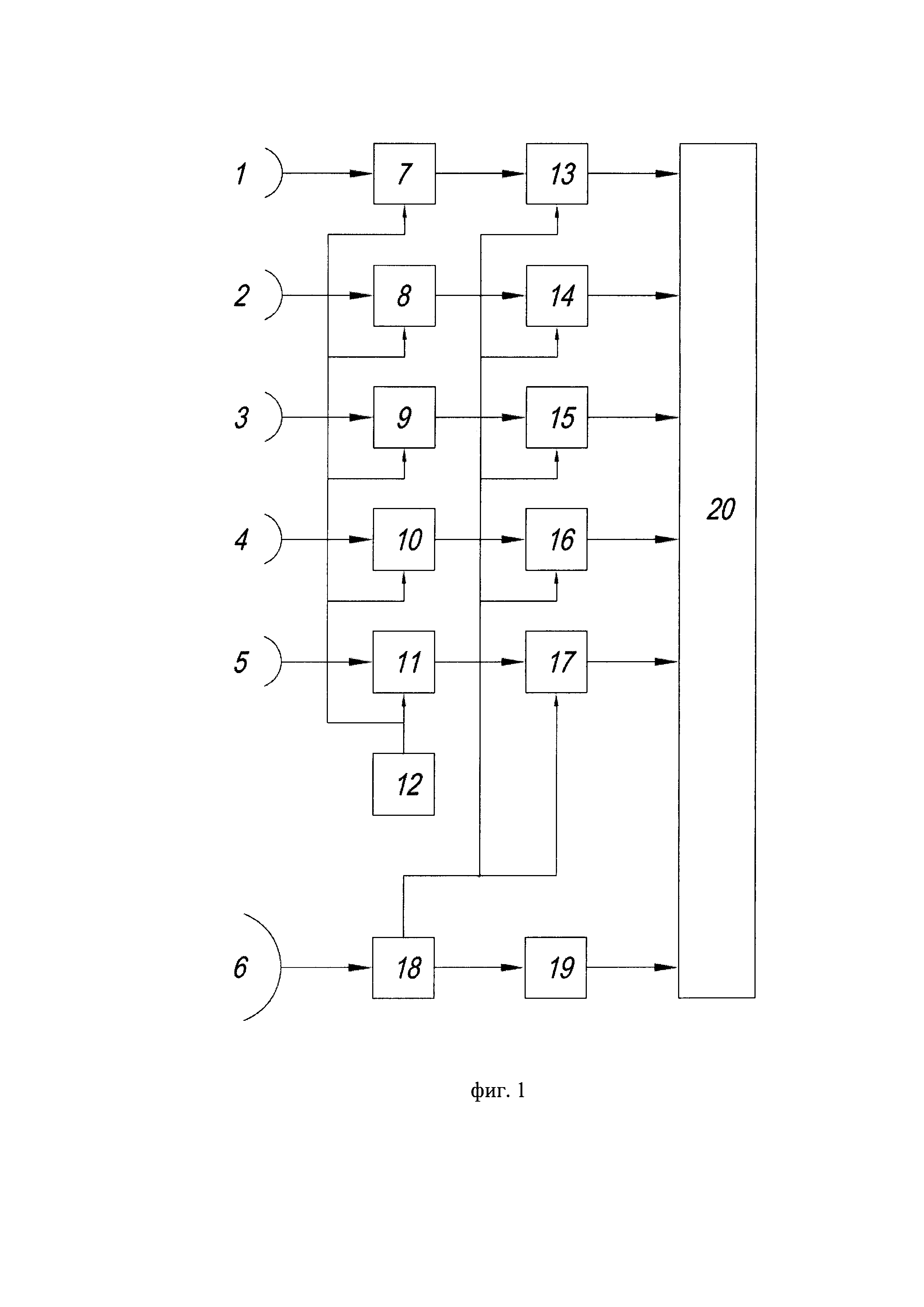
Сущность патентуемого изобретения поясняется описанием и чертежом, представленным на фиг. 1.
Функциональная схема активного малобазового корреляционно-фазового пеленгатора (фиг. 1) содержит пять антенн 1, 2, 3, 4, 5, расположенных по сторонам прямого угла, причем антенна 3 расположена в вершине этого угла, последовательно соединенные с ними пять приемников 7, 8, 9, 10, 11, гетеродин 12, выход которого соединен со вторыми входами приемников, пять цифровых корреляторов 13, 14, 15, 16, 17, первые входы которых соединены с выходами первого 7, второго 8, третьего 9, четвертого 10 и пятого 11 приемников соответственно, шестую антенну 6, последовательно соединенные с ней блок приемопередачи 18 и блок измерения дальности 19, вычислитель 20, входы которого соединены с выходами пяти цифровых корреляторов 13, 14, 15, 16, 17 и выходом блока измерения дальности 19 соответственно, второй выход блока приемопередачи 18 соединен со вторыми входами цифровых корреляторов 13, 14, 15, 16, 17.
Работает активный малобазовый корреляционно-фазовый пеленгатор следующим образом.
Антенна 6, с помощью блока приемопередачи 18, излучает зондирующий сигнал и принимает ответный сигнал от объекта. Ответный сигнал обрабатывается в блоке измерения дальности 19. После обработки, полученная информация о расстоянии до объекта поступает в вычислитель 20. Ответный сигнал также преобразуется по частоте в блоке приемопередачи 18 на промежуточную частоту, соответствующую промежуточной частоте приемников 7-11, и поступает на второй выход блока приемопередачи 18.
Ответный сигнал от объекта, принятый антеннами 1-5, после преобразования по частоте, усиления и фильтрации с помощью приемников 7-11, поступает на первые входы цифровых корреляторов 13-17. На вторые входы цифровых корреляторов 13-17 поступает сигнал со второго выхода блока приемопередачи 18. Цифровые корреляторы, после перемножения и усреднения сигналов, формируют на выходе информацию о разности фаз обрабатываемых сигналов следующим образом. После перемножения и усреднения сигналов, принимаемых антеннами 1-5 и антенной 6, получают квадратурные составляющие вида - Ii6=AiA6 cos(ϕi-ϕ6), Qi6=AiA6 sin(ϕi-ϕ6), Ai и ϕi - амплитуда и фаза сигналов, где i - соответствует номеру антенны 1-5. Формируют информацию о разности фаз принимаемых сигналов Δϕi6=arctgQi6/Ii6.
Таким образом, на выходах цифровых корреляторов имеем: коррелятор 13 - Δϕ16=ϕ1-ϕ6, коррелятор 14 - Δϕ26=ϕ2-ϕ6, коррелятор 15 - Δϕ36=ϕ3-ϕ6, коррелятор 16 - Δϕ46=ϕ4-ϕ6, коррелятор 17 - Δϕ56=ϕ5-ϕ6, где индекс фазы соответствует номеру антенны.
Энергетический потенциал измерительных каналов определяется результатом перемножения сигнала принятого антенной 6 и сигналов принятых антеннами 1-5. Размеры антенны 6 ограничены только возможностью технической реализации. Это позволяет, выбрав максимально возможный размер антенны 6, обеспечить высокую чувствительность активного малобазового корреляционно-фазового пеленгатора.
Измеренные разности фаз с выходов цифровых корреляторов 13-17 поступают в вычислитель 20, где производится вычисление разности фаз сигналов принятых антеннами 1,3, 2,3, 4,3 и 5,3 по следующему алгоритму: Δϕ13=ϕ16-Δϕ36=ϕ1-ϕ3, Δϕ23=Δϕ26-Δϕ36=ϕ2-ϕ3, Δϕ43=Δϕ46-Δϕ36=ϕ4-ϕ3, Δϕ53=Δϕ56-Δϕ36=ϕ5-ϕ3. Измерительные каналы 1,3 и 5,3 образуют точные измерительные базы пеленгатора, а измерительные каналы 2,3 и 4,3 - промежуточные базы пеленгатора, необходимые для раскрытия неоднозначности фазовых измерений. При этом фазовые набеги вносимые аппаратурой измерительного канала 6 не влияют на точность фазовых измерений корреляционно-фазового пеленгатора, т.к. они компенсируются.
Косинусы направляющих углов в двух ортогональных плоскостях вычисляют, с помощью вычислителя 20, по формулам cosθ1=Δϕ13λ/2πd13 и cosθ2=Δϕ53λ/2πd53, где λ - длина волны сигнала, d - база пеленгатора, θ1 - угол между направлением на объект и базой 1,3, θ2 - угол между направлением на объект и базой 5,3. Используя информацию о косинусах направляющих углах и расстоянии до объекта, измеренном блоком измерения дальности 19, вычисляют местоположение объекта.
Реферат
Изобретение относится к радиолокации и может быть использовано для определения текущего местоположения и траектории движения летательных объектов. Технический результат изобретения заключается в обеспечении измерения угловых координат и расстояния до объекта и повышении точности этих измерений, что, в свою очередь, позволяет с повышенной точностью определить местоположение объекта и траекторию его движения. Технический результат достигается путем комплексного использования фазового пеленгатора и радиодальномера в качестве составных элементов патентуемого устройства, что обеспечивает измерение угловых координат и расстояния до объекта. Использование в составе комплекса антенны радиодальномера большего размера, чем антенны фазового пеленгатора, позволяет значительно увеличить чувствительность комплекса. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Корреляционно-фазовый пеленгатор
Комментарии