Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции - RU2761106C1
Код документа: RU2761106C1
Чертежи


Описание
Изобретение относится к области радиотехники и может быть применено при одновременном измерении двух угловых координат (УК) цели в системах моноимпульсной радиолокации и радиопеленгации, использующих цифровые антенные решетки (АР) или аналоговые АР с цифровой обработкой сигналов.
Известны два подхода к измерению угловых координат целей в моноимпульсных обзорных радиолокационных станциях (РЛС), описанные например в [1 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, с. 3-14; 2 - Дудник П.И. Авиационные радиолокационные устройства. М.: изд. ВВИА им Жуковского, 1976, с. 328]. Первый из них - прямоотсчетный способ, основанный на измерении отклонения цели от сканирующего равносигнального направления (РСН) в пределах всего рабочего участка пеленгационной характеристики антенны. Второй - компенсационный способ, связанный с оценкой положения РСН при равенстве нулю сигнала углового отклонения от РСН.
Недостатком первого способа является резкое увеличение флуктуационной погрешности измерения вне РСН с возрастанием отклонения измеряемого угла от РСН и отличие крутизны пеленгационной характеристики (ПХ) при не идентичности амплитудных и фазовых характеристик суммарного и разностного каналов, вызывающее дополнительную погрешность смещения показаний, возрастающую с увеличением измеряемого угла.
Для компенсационного способа, реализуемого в моноимпульсной РЛС, характерна более высокая точность, при которой обеспечивается наименьшая флуктуационная погрешность, нулевая погрешность смещения. Для обеспечения приемлемой точности измерения углового положения цели необходимо получить угловой разнос между соседними сериями измерений (скорость сканирования по углу), меньший части допустимой угловой погрешности измерения.
Однако это существенно снижает скорость сканирования по сравнению с прямоотсчетным способом измерения.
Известен способ измерения угловых координат в обзорной моноимпульсной РЛС [3 - патент 2270458, РФ. Способ измерения угловых координат целей в моноимпульсной обзорной РЛС и моноимпульсная обзорная РЛС / Адодин В.М., Валов С.В., Нестеров Ю.Г., Пономарев Л.И., Юрк В.И. МПК G01S 3/22, G01S 13/44. Опубл. 20.06.2006], в котором СВЧ-сигнал передатчика подается через антенный коммутатор к антенне, содержащей зеркало с двухрупорным облучателем. Для определения углового положения цели последовательно изменяют угловое положение РСН, осуществляют пороговое обнаружение сигнала и, используя пеленгационные отсчеты, находят положение цели на пеленгационной характеристике. Затем оцифровывают амплитуды сигналов, записывают их в память, после достижения РСН конца сектора обзора по результатам записи итерациями находят сигналы целей и их угловые координаты, определяют уравнение прямой, аппроксимирующей поведение пеленга в зависимости от ориентации РСН и вычисляют угол РСН, при котором пеленг цели равен нулю. Этот найденный угол считают УК цели, его записывают в выходной массив результатов измерений, следующее из которых получают путем вычисления новой реализации сглаженного суммарного сигнала, повторяют итерационную процедуру с новой реализацией, пока глобальные максимумы не окажутся ниже порога, после чего производится выдача потребителю массива найденных УК целей.
Однако, как указано выше, скорость определения УК целей с использованием компенсационного подхода меньше, чем при использовании прямоотсчетного подхода.
Известен амплитудный моноимпульсный способ обработки сигналов при двухканальной обзорной амплитудной пеленгации [4 - патент 2225990, РФ. Способ обработки сигналов при двухканальной амплитудной пеленгации / Аветисьянц В.А., Горовой А.В., Ларионов Б.А., Музыченко Н.Ю., Фоминченко Г.Л. МПК G01S 3/14. Опубл. 20.03.2003]. Для определения направления на цель в одной плоскости с помощью фазированной антенной решетки формируют пару диаграмм направленности (ДН), разнесенных на ширину ДН по уровню минус 3 дБ для образования РСН, осуществляют в заданном угловом секторе поиск сигналов, принимают сигналы, отраженные от целей, усиливают их, преобразуют по частоте в сторону понижения, оцифровывают и разделяют их по частоте. Затем формируют ПХ углового дискриминатора путем перемещения пары ДН в пределах сектора пеленгования, вычисления абсцисс центров тяжести полученных реализаций в моменты максимальных значений корреляционных интегралов, найденных по способу совпадения полярностей, и аппроксимации ее линейной функцией, и путем решения пеленгационного уравнения вычисляют угол прихода сигналов.
Недостатками аналога являются пониженная точность определения УК из-за недостаточно точной аппроксимации нелинейной ПХ линейной функцией, пониженная скорость измерения УК из-за необходимости получения ряда реализаций сигнала для формирования ПХ углового дискриминатора.
Наиболее близким по технической сущности (прототипом) является способ определения направления на цель цифровой антенной решеткой моноимпульсной РЛС [5 - патент 2615491, РФ. Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала / Джиоев А.Л., Омельчук И.С., Яковленко В.В. МПК G01S 13/44, G01S 3/14. Опубл. 05.04.2017], состоящий в том, что осуществляют прием сигнала с направления в окрестности заданного равносигнального направления М-антенными элементами цифровой антенной решетки, в каждом канале принятые сигналы усиливают, переносят на промежуточную частоту, преобразуют в цифровую форму в виде М-мерного комплексного вектора входных сигналов цифровой антенной решетки, формируют комплексные сигналы моноимпульсной группы лучей, формируют два разностных сигнала, соответствующие разностям амплитуд пар комплексных сигналов моноимпульсной группы лучей, максимумы которых разведены относительно равносигнального направления вдоль ортогональных координатных направлений, нормируют полученные сигналы к амплитуде суммарного сигнала лучей, между которыми вычислялись разностные сигналы, оценивают составляющие единичного вектора р направления на цель в окрестности равносигнального направления путем сопоставления полученных значений нормированных разностных сигналов с линейными пеленгационными характеристиками антенны, заданными вдоль каждого координатного направления.
Недостатком способа является ограниченный угловой сектор, в котором пеленгационная характеристика может считаться линейной функцией. Пеленгационную характеристику строят с учетом формы лучей моноимпульсной группы в ортогональных сечениях, проходящих через равносигнальное направление. Разность ДН хорошо аппроксимируется линейной функцией в ограниченной области углов, в которой и сами ДН можно аппроксимировать линейными функциями. Как правило, равносигнальное направление выбирают на уровне 0,707 от ДН, нормированной по полю. В этих точках крутизна ДН близка к максимальному значению, что и определяет возможность линейной аппроксимации разности двух ДН. Однако, чем больше смещение цели относительно равносигнального направления вдоль выбранного координатного направления, тем больше погрешность оценки угловой координаты. Если цель смещается одновременно в двух плоскостях, то пеленгационная характеристика, построенная вдоль других координатных линий, будет отличаться. Ее крутизна будет меньше. В результате будут увеличиваться и систематическая ошибка, и чувствительность оценки угловых координат к шумам измерений.
Технической проблемой, на решение которой направлено изобретение, является повышение точности определения направляющих косинусов в условиях воздействия шумов при расширении пространственной области измерений моноимпульсным методом.
Для решения указанной технической проблемы предлагается способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции, состоящий в том, что осуществляют прием сигнала с направления в окрестности заданного равносигнального направления М-антенными элементами цифровой антенной решетки, в каждом канале принятые сигналы усиливают, переносят на промежуточную частоту, преобразуют в цифровую форму в виде составляющих М-мерного комплексного вектора цифровых отсчетов входных комплексных сигналов цифровой антенной решетки, формируют цифровые отсчеты комплексных сигналов моноимпульсной группы лучей путем суммирования составляющих М-мерного комплексного вектора цифровых отсчетов входных комплексных сигналов цифровой антенной решетки с заданными комплексными весовыми коэффициентами.
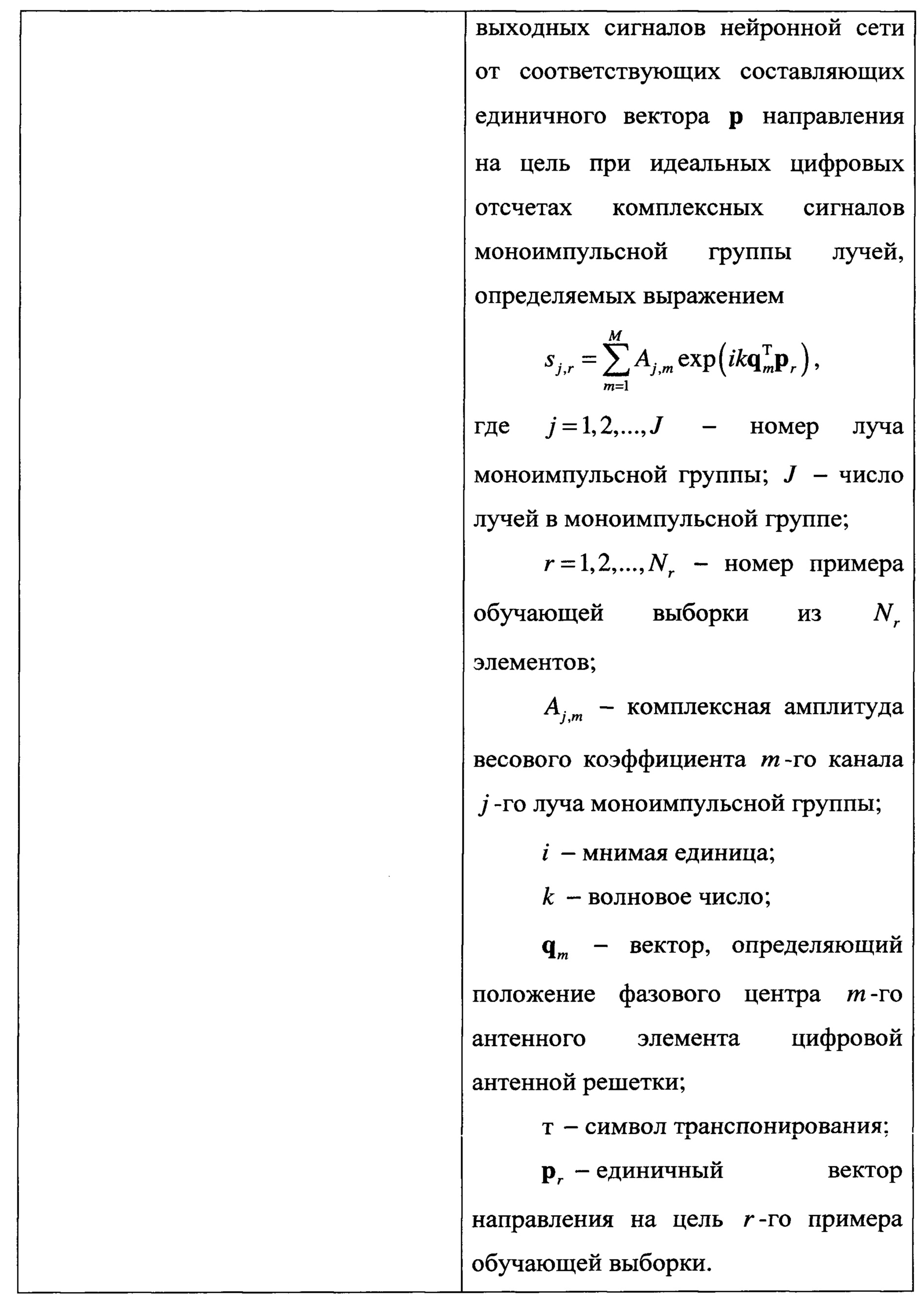
Согласно изобретению, цифровые отсчеты комплексных сигналов моноимпульсной группы лучей нормируют к максимальной амплитуде цифровых отсчетов одного из сигналов моноимпульсной группы лучей, передают нормированные цифровые отсчеты сигналов моноимпульсной группы лучей на вход нейронной сети, формируют выходные сигналы нейронной сети, которые соответствуют оценкам составляющих единичного вектора р направления на цель, коэффициенты связи и смещения нейронной сети заранее выбирают в результате ее обучения по критерию минимума среднеквадратического отклонения выходных сигналов нейронной сети от соответствующих составляющих единичного вектора р направления на цель при идеальных цифровых отсчетах комплексных сигналов моноимпульсной группы лучей, определяемых выражением:

где j = 1, 2, …, J - номер луча моноимпульсной группы;
J - число лучей в моноимпульсной группе;
r = 1, 2, …, Nr - номер примера обучающей выборки из Nr элементов;
Aj,m - комплексная амплитуда весового коэффициента m-го канала j-го луча моноимпульсной группы;
i - мнимая единица;
k - волновое число;
qm - вектор, определяющий положение фазового центра m-го антенного элемента цифровой антенной решетки;
т - символ транспонирования;
pr - единичный вектор направления на цель r-го примера обучающей выборки.
Таким образом, предлагаемый способ имеет следующие отличительные признаки и последовательность его реализации от способа-прототипа, которые приведены в таблице 1.


Из представленной таблицы сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что введены следующие новые операции:
8. Цифровые отсчеты комплексных сигналов моноимпульсной группы лучей нормируют к максимальной амплитуде цифровых отсчетов одного из сигналов моноимпульсной группы лучей.
9. Передают нормированные цифровые отсчеты сигналов моноимпульсной группы лучей на вход нейронной сети.
10. Формируют выходные сигналы нейронной сети, которые соответствуют оценкам составляющих единичного вектора р направления на цель.
11. Коэффициенты связи и смещения нейронной сети заранее выбирают в результате ее обучения по критерию минимума среднеквадратического отклонения выходных сигналов нейронной сети от соответствующих составляющих вектора р направления на цель при идеальных цифровых отсчетах комплексных сигналов моноимпульсной группы лучей, определяемых выражением
где j = 1, 2, …, J - номер луча моноимпульсной группы;
J - число лучей в моноимпульсной группе;
r = 1, 2, …, Nr - номер примера обучающей выборки из Nr элементов;
Aj,m - комплексная амплитуда весового коэффициента m-го канала j-го луча моноимпульсной группы;
i - мнимая единица;
k - волновое число;
qm - вектор, определяющий положение фазового центра m-го антенного элемента цифровой антенной решетки;
т - символ транспонирования;
pr - единичный вектор направления на цель r-го примера обучающей выборки.
Введение четырех операций позволяет, по сравнению со способом-прототипом, обеспечить достижение технического результата, состоящего в возможности получения физически нереализуемой диаграммы направленности приемной цифровой антенной решетки с электрическим сканированием.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам предлагаемого технического решения, отсутствуют в известных источниках из уровня техники, что указывает на соответствие предлагаемого способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками преобразований на достижение указанного технического результата. Следовательно, предлагаемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
Сущность предлагаемого способа раскрывается фигурами 1-6.
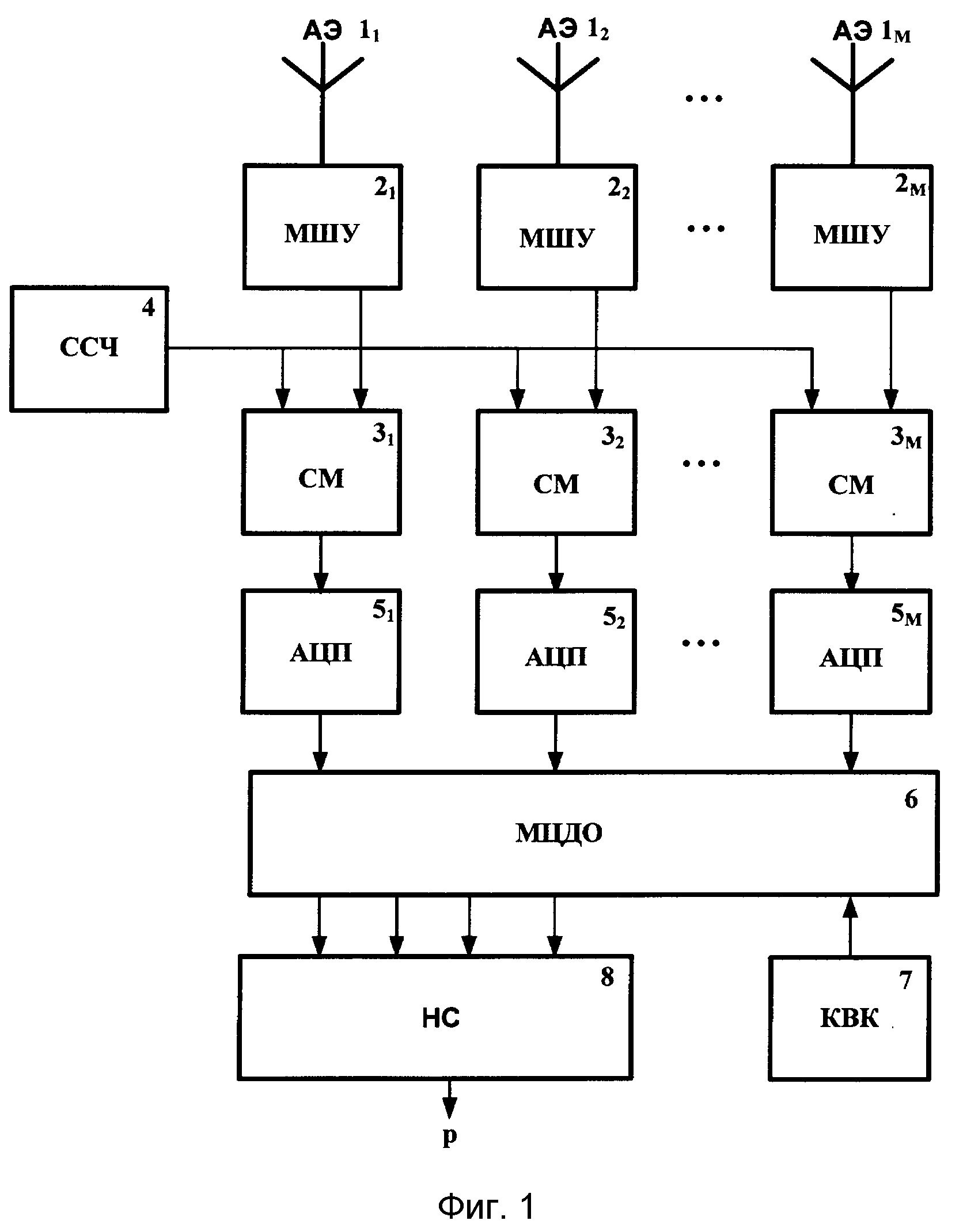
На фигуре 1 приведена структурная схема устройства определения направления на цель цифровой антенной решеткой моноимпульсной РЛС, позволяющего реализовать предлагаемый способ.
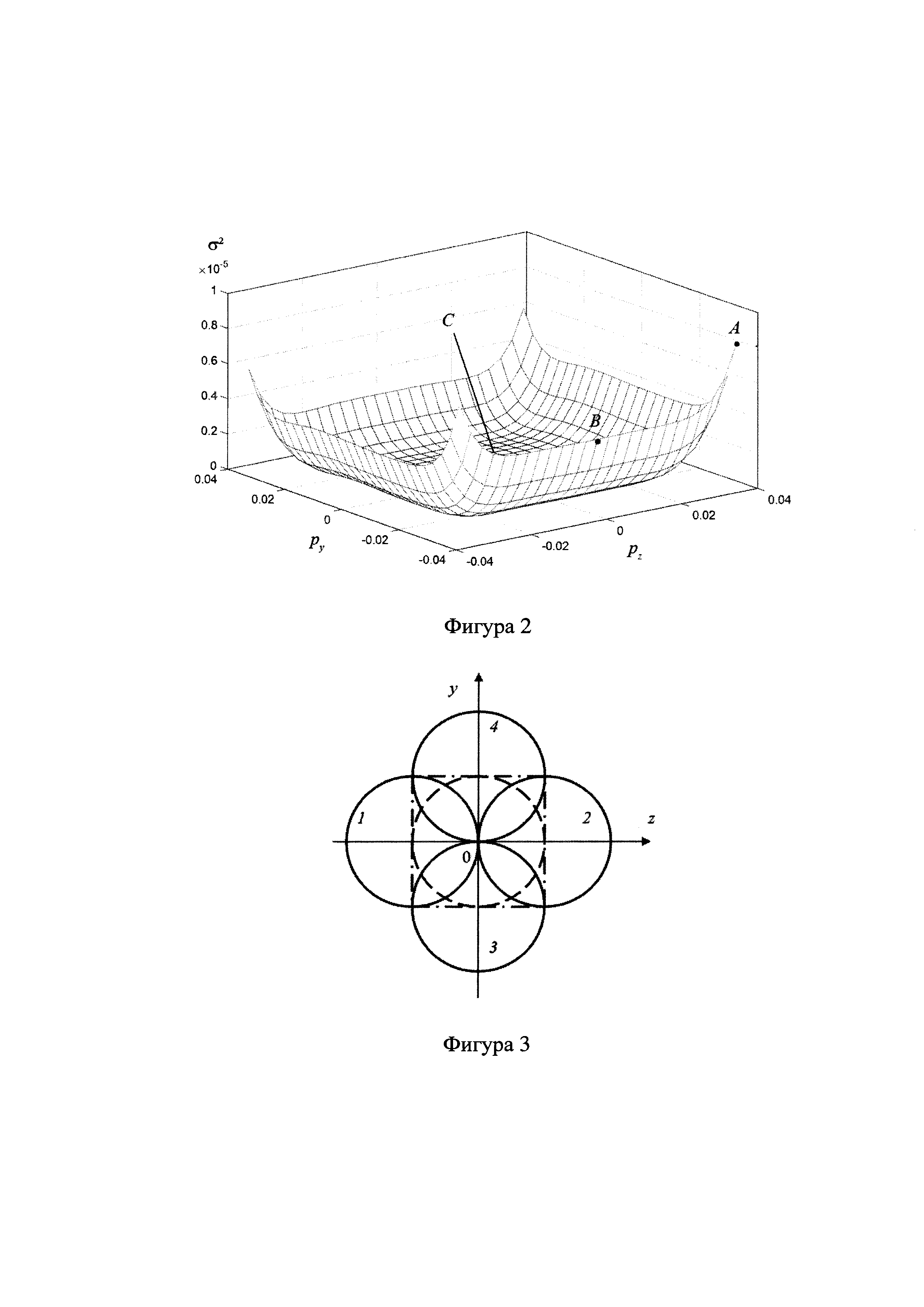
На фигуре 2 показана поверхность дисперсий оценок направляющих косинусов от истинных значений в моноимпульсной системе при отношении сигнал/шум (ОСШ) в комплексных сигналах моноимпульсной группы лучей, равном 12,2 дБ.
На фигуре 3 приведено распределение лучей моноимпульсной группы в пространстве относительно равносигнального направления.
На фигуре 4 представлена диаграмма, демонстрирующая качество обучения и сходимость процесса обучения нейронной сети методом Левенберга-Маквардта [6 - Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. - М.: Мир, 1985, 509 с.].
На фигуре 5 показана поверхность дисперсий оценок направляющих косинусов от истинных значений предлагаемым способом при ОСШ в комплексных сигналах моноимпульсной группы лучей, равном 12,2 дБ.
Способ определения направления на цель цифровой антенной решеткой моноимпульсной РЛС включает следующие операции:
- осуществляют прием сигнала с направления в окрестности заданного равносигнального направления М-антенными элементами цифровой антенной решетки - 1;
- в каждом канале принятые сигналы усиливают - 2;
- переносят принятые сигналы на промежуточную частоту - 3;
- преобразуют принятые сигналы в цифровую форму в виде составляющих М-мерного комплексного вектора цифровых отсчетов входных сигналов цифровой антенной решетки - 4;
- формируют цифровые отсчеты комплексных сигналов моноимпульсной группы лучей путем суммирования составляющих М-мерного комплексного вектора цифровых отсчетов входных сигналов цифровой антенной решетки с заданными комплексными весовыми коэффициентами - 5;
- цифровые отсчеты комплексных сигналов моноимпульсной группы лучей нормируют к максимальной амплитуде цифровых отсчетов одного из сигналов моноимпульсной группы лучей - 6;
- передают нормированные цифровые отсчеты сигналов моноимпульсной группы лучей на вход нейронной сети - 7;
- формируют выходные сигналы нейронной сети, которые соответствуют оценкам составляющих единичного вектора р направления на цель - 8;
- коэффициенты связи и смещения нейронной сети заранее выбирают в результате ее обучения по критерию минимума среднеквадратического отклонения выходных сигналов нейронной сети от соответствующих составляющих вектора р направления на цель при идеальных цифровых отсчетах комплексных сигналов моноимпульсной группы лучей, определяемых выражением
где j = 1, 2, …, J - номер луча моноимпульсной группы;
J - число лучей в моноимпульсной группе;
r = 1, 2, …, Nr - номер примера обучающей выборки из Nr элементов;
Aj,m - комплексная амплитуда весового коэффициента m-го канала j-го луча моноимпульсной группы;
i - мнимая единица;
k - волновое число;
qm - вектор, определяющий положение фазового центра m-го антенного элемента цифровой антенной решетки;
т - символ транспонирования;
pr - единичный вектор направления на цель r-го примера обучающей выборки - 9.
Структурная схема устройства, осуществляющего способ определения направления на цель цифровой антенной решеткой моноимпульсной РЛС, приведена на фигуре 1 (возможный вариант выполнения).
Устройство на фиг. 1 содержит последовательно включенные М антенных элементов (АЭ)11…1м, М малошумящих усилителей (МШУ) 21…2м, М смесителей (См) 31…3м и М аналого-цифровых преобразователей (АЦП) 41…4м. Управляющие входы См 31…3м соединены с соответствующими выходами синтезатора сетки частот (ССЧ) 5. Выходы всех АЦП 41…4м подключены к соответствующим первым входам модуля цифрового диаграммообразования (МЦДО) 6. Второй вход МЦДО 6 соединен с блоком хранения комплексных весовых коэффициентов (БВК) 7. Выходы МЦДО 6 подключены к входам нейронной сети (НС) 8. Выходы НС 8 служат для съема выходных сигналов нейронной сети в виде составляющих единичного вектора р направления на цель.
Подобное построение ЦАР и входящих в нее узлов и блоков приведено например в [7 - Григорьев Л.Н. Цифровое формирование диаграммы направленности в фазированных антенных решетках. М.: Радиотехника. 2010. С. 15-62; 8 - Устройства СВЧ и антенн. Проектирование фазированных антенных решеток / Под ред. Д.И. Воскресенского. М.: Радиотехника. 2012. С. 520-537].
Рассмотрим работу устройства.
Сигналы, принятые М АЭ 11…1м ЦАР, поступают на входы М МШУ 21…2м, где их усиливают. В CM 31…3м с помощью сигнала ССЧ 4 выполняют перенос усиленных сигналов на промежуточную частоту. В АЦП 51…5м осуществляют преобразование комплексных огибающих в цифровую форму одним из известных способов, описанных например в [7, с. 44-58]. Цифровые отсчеты сигналов М каналов поступают на входы МЦ ДО 6. В МЦДО 6 производят формирование и дальнейшую обработку цифровых отсчетов сигналов. Для этого на второй вход МЦДО 6 подают из блока КВК 7 в виде дополнительного кода комплексные весовые коэффициенты, позволяющие управлять формой, положением и углом разведения приемных ДН. Для заданных направлений фазирования и номеров отсчетов сигналов производится их умножение на комплексные весовые коэффициенты. Из полученных цифровых отсчетов сигналов формируют по две приемные ДН для угломестной и азимутальной плоскостей, разведенные на угол L. Так в [8, с. 524-532] рекомендовано выбирать угол L, равный половине ширине ДН по уровню половинной мощности.
Операцию нормировки комплексных сигналов моноимпульсной группы лучей к максимальному значению амплитуды сигналов моноимпульсной группы лучей производят на конечном этапе формирования приемных ДН. Полученные цифровые отсчеты сигналов, соответствующие амплитудам нормированных сигналов моноимпульсной группы лучей, передают на вход полносвязной нейронной сети НС 8.
Коэффициенты связи и смещения НС 8 заранее выбирают в результате ее обучения по критерию минимума среднеквадратического отклонения выходных сигналов нейронной сети от соответствующих составляющих вектора р направления на цель при идеальных комплексных сигналах моноимпульсной группы лучей, определяемых выражением:
где j = 1, 2, …, J - номер луча моноимпульсной группы;
J - число лучей в моноимпульсной группе;
r = 1, 2, …, Nr - номер примера обучающей выборки из Nr элементов;
Aj.m - комплексная амплитуда весового коэффициента m-го канала j-го луча моноимпульсной группы;
i - мнимая единица;
k - волновое число;
qm - вектор, определяющий положение фазового центра m-го антенного элемента ЦАР;
т - символ транспонирования;
pr - единичный вектор направления на цель r-го примера обучающей выборки.
На выходах НС 8 формируют выходные сигналы нейронной сети, которые соответствуют оценкам составляющих единичного вектора р=(р1,р2,p3) направления на цель. Следует отметить, что в случае использования линейной или плоской ЦАР достаточно определить две составляющие единичного вектора (р1,р2), а для ЦАР, размещенной на криволинейной поверхности, потребуется определение трех составляющих единичного вектора р=(р1,р2,р3) направления на цель.
Выполнение блоков и узлов, приведенных на фиг. 1, возможно с использованием современной элементной базы, в частности микропроцессоров и ПЛИС [7].
Рассмотрим обоснование предлагаемого способа определения направления на цель цифровой антенной решеткой моноимпульсной РЛС.
Пусть имеется М-элементная антенная решетка (АР), на выходах которой источник, излучающий в направлении р, возбуждает вектор детерминированных сигналов

где а, φ - амплитуда и фаза источника; qm - вектор, определяющий положение фазовых центров антенных элементов АР; Т - символ транспонирования; ω - круговая частота.
На выходах каналов АР также присутствует составляющая шума, которую обозначим вектором ξ(t)=(ξm(t)|m=1, 2, …, M). Собственные шумы элементов АР будем считать распределенными по нормальному закону с нулевыми математическими ожиданиями и дисперсией σ2, независимыми между собой и с полезным сигналом.
В результате выходной вектор сигналов каналов АР можно представить в виде

На выходе АР для обработки сигналов используют множество диаграмм направленности (ДН), формируемых при помощи N наборов М-элементных комплексных весовых коэффициентов (КВК), которые могут быть заданы прямоугольной матрицей А.
Тогда комплексные сигналы на выходе АР могут быть записаны в виде

Второе слагаемое в выражении (3) представляет собой случайную вектор-функцию, компоненты которой распределены по нормальному закону с нулевыми математическими ожиданиями и дисперсиями


Вектор Атх(р,t) - детерминированная составляющая вектор функции u(p,t).
Задача состоит в получении оценки вектора р по известному измеренному вектору u(р,t) в фиксированный момент времени t.
Оценку вектора р будем искать как оценку максимального правдоподобия.
Функция правдоподобия выборки входного сигнала в некоторый момент времени t имеет вид [9 - Ратынский М.В., Порсев В.И. Моноимпульсная пеленгация в РЛС с цифровыми ФАР / Под ред. В.И. Порсева. - М.: Радиотехника, 2019, с. 18]

где Н - символ эрмитова сопряжения.
Максимизация функции правдоподобия Lz эквивалентна минимизации квадрата нормы евклидова пространства

по неизвестному параметру р.
Для решения задачи будем использовать нейросетевой подход, в соответствии с которым единичный вектор р' представляет собой отклик нейронной сети на входные воздействия, т.е.

где


{w;b} - компактная форма записи, обозначающая множество всех коэффициентов нейронной сети.
Обучение нейронной сети может быть выполнено по критерию минимума целевой функции (5) после замены р на Y(u',{w;b}) и u(р,t) на u'. При этом целевая функция (5) становится функцией коэффициентов связи и смещения нейронной сети

В силу того, что между векторами u' и р' существует однозначная функциональная связь, задача поиска минимума (8) эквивалентна минимизации целевой функции

Методы обучения нейронных сетей известны, например [10 - Николенко С.И., Кадурин А.А., Архангельская Е.О. Глубокое обучение. СПб.: Питер. 2018. 480 с.]. В настоящее время в основе большинства методов обучения с учителем лежат разновидности градиентных методов и метод обратного распространения ошибки, при котором задача сводится к определению компонентов вектора градиента
Пусть координаты элементов плоской М-элементной АР заданы в правой декартовой системе координат Oxyz, в которой начало отсчета (точка О совпадает с фазовым центром антенны, направление оси Ох - с направлением внешней нормали, оси Oz и Оу расположены в плоскости раскрыва антенны). При этом элементы векторов-столбцов qm=(qxm;qym;qzm) имеют нулевую составляющую qxm=0.
Пусть вектор-строка r0=(r0x;r0y;r0z) определяет положение равносигнального направления, относительно которого вдоль ортогональных координатных направлений попарно разведены лучи АР, образующие прямую моноимпульсную связку.
В этом случае элементы матрицы А могут быть заданы при помощи выражений




где A0m=|A0m|exp(iψ0m) - комплексная амплитуда m-го канала АР при формировании неотклоненного луча; δry, δrz - смещения лучей вдоль соответствующих координатных направлений.
Матрице КВК А соответствуют четыре приемных ДН, определяемых выражением

где (py,pz) - направляющие косинусы, определяющие направление на цель;

Сомножитель
Как видно, вектор-функция f(py,pz) аналогична вектор-функции х(р,t) и отличается только тем, что в ней отброшена составляющая exp(iωt) и учтена система координат наблюдения. Отсюда следует, что на выходе антенны с учетом составляющей шума в момент времени t получают вектор сигналов

В этом случае измерение угловых координат классическим амплитудным методом осуществляют при помощи двух пеленгационных характеристик:


Измерение координат моноимпульсным методом осуществляют на линейном участке ПХ. При этом крутизна ПХ соответствует отношению


а соответствующие угловые координаты находят по формулам:

В отличие от классического моноимпульсного метода нейросетевой подход не требует формирования ПХ.
Выходные сигналы моноимпульсной группы лучей необходимо подвергнуть нормировке (чтобы исключить влияние на отклик нейронной сети амплитуды а источника).
Рассмотрим набор входных сигналов нейронной сети, получаемых после нормировки к максимальной амплитуде сигналов моноимпульсной группы:

Например, пусть нейронная сеть содержит три слоя. В этом случае отклик НС можно представить в виде вектора

где
Число слоев может быть и больше, но не меньше двух. При этом выражение (22) несложно трансформировать для любого произвольного числа слоев.
Пусть плоская АР состоит из М=30×30=900 антенных элементов, размещенных в узлах прямоугольной сетки с одинаковым шагом 0,5λ по вертикали и горизонтали. Для формирования приемных лучей моноимпульсной группы будем использовать синфазные распределения

где ΔAy,z - «пьедесталы» амплитудных распределений; Ly,z - линейные размеры АР.
В главных сечениях ширина ориентированного по нормали к раскрыву луча рассматриваемой АР с амплитудным распределением вида (24) при ΔAy=0,3 равна 4,22°. В этом случае для реализации классического моноимпульсного пеленгатора необходимо развести лучи АР в противоположные стороны от равносигнального направления r0=(1,0,0) на угол, равный половине ширины луча. При этом параметры δry=δrz=sin2,11°=0,0368.
На фиг. 2 приведена соответствующая способу прототипу поверхность дисперсий оценок угловых координат от истинных значений, полученных при ОСШ комплексных сигналов моноимпульсной группы лучей, равном 12,2 дБ. Точка А на фиг. 2 соответствует максимальной дисперсии ошибки измерения угловых координат цели моноимпульсным методом в прямоугольной области пространства направляющих косинусов при смещении цели относительно РСН (точка С на фиг. 2) по обеим координатам. Точка В обозначает максимальную дисперсию ошибки измерения угловой координаты моноимпульсным методом при смещении цели вдоль одного из координатных направлений. Видно, что при увеличении отклонения цели от РСН даже при низком уровне шумов точность оценивания направляющих косинусов быстро уменьшается. Для рассматриваемого примера в точке А величина дисперсии ошибки

На фиг. 3 показано распределение лучей моноимпульсной группы в пространстве относительно РСН. Области лучей по уровню половинной мощности пронумерованы и разнесены вдоль координатных направлений. При этом штриховой линией показана область, занимаемая центральным или суммарным лучом моноимпульсной группы. Штрих-пунктирная линия соответствует области измерений, для которой получена поверхность дисперсии ошибок на фиг. 2. Соотношение площадей, занимаемой центральным лучом и квадрата, в который вписан центральный луч, по известным формулам площади квадрата и круга составляет 1,273.
Отметим, что в выбранной системе координат составляющие (p1,p2) вектора направления соответствуют компонентам вектора ру и pz, а составляющая р3=рх определяется из условия единичной длины вектора направления.
Для реализации предлагаемого способа была использована полносвязная нейронная сеть прямого распространения с четырьмя входными сигналами, тремя скрытыми слоями, содержащими 100, 40 и 10 нейронов. Функции активации во всех скрытых слоях соответствовали функции tgh(x). Выходной слой содержал два нейрона с линейной функцией активации, т.е. НС имела два выходных сигнала.
Обучение НС осуществлялось на выборке из 4000 примеров, которые были сгенерированы при помощи датчика случайных чисел, распределенных равномерно в прямоугольной области, в которую вписана линия уровня 0,707 центрального луча АР. Эта область показана на фиг. 3 штрих-пунктирной линией.
На фиг. 4 приведена диаграмма, иллюстрирующая сходимость процесса обучения нейронной сети и качество обучения при использовании метода Левенберга-Маквардта [6]. Первые две кривые на фиг. 4 соответствуют значениям показателя (9) в конце каждой эпохи обучения. При этом кривая 1 характеризует среднюю ошибку всех выходов сети по всему набору обучающих примеров. Кривая 2 - среднюю ошибку всех выходов сети для тестовой выборки примеров, не используемых в обучении. Кривая 3 соответствует индикатору переобучения нейронной сети (процесс обучения может быть остановлен при условии монотонного роста кривой 3 на протяжении нескольких эпох).
Процесс обучения занял 5 минут 17 секунд.
На фиг. 5 представлена соответствующая предлагаемому способу поверхность дисперсий оценок угловых координат от истинных значений, полученных при ОСШ комплексных сигналов моноимпульсной группы лучей, равном 12,2 дБ. Обозначения на данной фигуре соответствуют введенным ранее на фиг. 2. При этом

Чтобы ограничить рост угловой ошибки при смещении цели в двух плоскостях в моноимпульсных системах выполняют измерения угловых координат в области пространства, соответствующей центральному или суммарному лучу моноимпульсной группы. При этом площадь пространства, в которой производятся измерения уменьшается. Предлагаемый способ позволяет рассматривать прямоугольную область измерений. При этом величина угловой ошибки меньше, а область измерений расширяется примерно в 1,273 раза.
Поскольку полученные оценки соответствуют одной из возможных реализаций шума, в таблице 2 приведены несколько значений средних дисперсий по всей области измерений для способа прототипа и предлагаемого способа определения направления на цель. Из анализа данных таблицы следует вывод о преимуществе предлагаемого способа по сравнению со способом-прототипом.

Таким образом, подтверждение возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа, выполненное по результатам имитационного моделирования, а также приведенные примеры демонстрируют возможности повышения точности оценок угловых координат в моноимпульсных РЛС и расширения пространственной области оценивания угловых координат в 1,273 раза при помощи предлагаемого способа и его реализуемость.
Приведенные выше материалы о возможной реализации способа с помощью устройства на основе известных блоков и устройств подтверждают соответствие критерию "промышленная применимость" предлагаемого способа.
Реферат
Изобретение относится к области радиотехники и может быть использовано при одновременном измерении двух угловых координат цели в системах моноимпульсной радиолокации и радиопеленгации, использующих цифровые антенные решетки (АР) или аналоговые АР с цифровой обработкой сигналов. Техническим результатом является повышение точности определения направляющих косинусов в условиях воздействия шумов при расширении пространственной области измерений моноимпульсным методом. В заявленном способе осуществляют прием отраженного сигнала с направления в окрестности заданного равносигнального направления М-антенными элементами цифровой антенной решетки. Принятые сигналы в каждом канале усиливают, переносят на промежуточную частоту и осуществляют преобразование комплексных огибающих в цифровую форму в виде составляющих М-мерного комплексного вектора цифровых отсчетов входных сигналов цифровой антенной решетки. Далее формируют цифровые отсчеты комплексных сигналов моноимпульсной группы лучей путем суммирования составляющих М-мерного комплексного вектора с заданными весовыми коэффициентами и нормируют их к максимальной амплитуде цифровых отсчетов одного из сигналов моноимпульсной группы лучей. После этого передают нормированные цифровые отсчеты сигналов моноимпульсной группы лучей на вход нейронной сети с заранее выбранными коэффициентами связи и смещения нейронной сети по результатам ее обучения по критерию минимума среднеквадратического отклонения выходных сигналов нейронной сети от соответствующих составляющих единичного вектора р направления на цель. В результате формируют выходные сигналы нейронной сети, которые соответствуют оценкам составляющих единичного вектора р направления на цель. 5 ил., 2 табл.
Формула
Комментарии