Способ пеленгации источника активных помех - RU2699028C1
Код документа: RU2699028C1
Чертежи

Описание
Изобретение относится к области радиолокации и может использоваться в радиолокационных станциях (РЛС) для пеленгации источника активных помех в случае, когда передатчик активных помех не совмещен с прикрываемым объектом, сигнал от помехи воздействует через боковые лепестки диаграммы направленности (ДН) подавляемой РЛС.
Известно, что активные помехи, воздействующие через боковые лепестки диаграммы направленности (ДН), представляют серьезную угрозу РЛС (в результате воздействия помех создается большое число ложных сигналов (отметок), что ухудшает или даже исключает нормальную работу РЛС. Чтобы обеспечить нормальное функционирование РЛС, необходима защита от помех.
Известным способом защиты РЛС от помех является снижение уровня боковых лепестков диаграммы направленности антенны (Защита от радиопомех. Под ред. М.В. Максимова, М., Сов. Радио, 1976 с. 273-276) Однако поскольку уровень боковых лепестков диаграммы направленности антенны связан с другими параметрами антенны (с шириной главного лепестка ДНА (луча антенны), с коэффициентом направленного действия (КНД), коэффициентом полезного действия (КПД) и т.п.), то произвольное снижение уровня боковых лепестков ДН антенны недопустимо. Следствием такого снижения может оказаться значительное ухудшение таких технических характеристик РЛС, как точность измерения угловых координат, разрешающая способность по угловым координатам, дальность обнаружения, что, как правило, неприемлемо.
Существуют другие способы защиты РЛС от помех, например, способ, использующий угловую селекцию целей за счет формирования нулей в диаграмме направленности антенны в направлении источников помех (Защита радиолокационных систем от помех. Состояние и тенденции развития. Под ред. А.И Канащенкова и В.И. Меркулова, М.: Радиотехника, 2003, с. 16). Для формирования нулей в диаграмме направленности антенны в направлении источников помех необходимо определить угловые координаты источника помех.
Определить угловые координаты источника помех можно различными способами. Так в отдаленном аналоге заявляемого изобретения используется способ, основанный на облучении объекта, приеме от него смеси отраженного и помехового сигнала, определении углового положения объекта несколькими парами территориально распределенных измерителей, используя триангуляционный метод, определяют координаты пространственного положения объекта для каждой пары измерителей, по значениям которых рассчитывают рассогласование в координатах пространственного положения объекта, и если полученные рассогласования в результате сравнения с априорным пороговым значением, определяющим область допустимых ошибок измерений координат с заданной вероятностью, оказываются больше, то принимается решение о наличии помехи (патент №2568106 Кл. МПК G01S 7/36, Опубликовано: 10.11.2015).
Данный способ позволяет определить координаты пространственного положения помехи.
Однако, этому способу присущи следующие недостатки:
- необходимость использования несколько пар территориально распределенных измерителей и координационного центра;
- необходимость надежной связи между измерителями и координационным центром для передачи информации в режиме реального времени;
- определение положения помехи главным лучом диаграммы направленности антенны.
Более близким аналогом, выбранным в качестве прототипа в связи со сходством выполняемой технической задачи, является способ определения угловых координат источника помех, включающий одновременное измерение уровней активной помехи (УАП) на выходе основного приемного канала РЛС, имеющего узконаправленную диаграмму направленности антенны (ДНА) и дополнительного приемного канала, ДН антенны которого перекрывает боковые лепестки ДН антенны основного приемного канала, но ниже уровня главного лепестка его ДН антенны, определение отношения УАП на выходе основного приемного канала к УАП на выходе дополнительного приемного канала и сравнение полученного отношения УАП с первым пороговым значением, равным минимальной величине отношения уровня ДН антенны основного приемного канала к уровню ДН антенны дополнительного приемного канала в пределах области пеленгации, задаваемой по координатам угол места - азимут в окрестности главного лепестка ДН антенны основного приемного канала, причем полученное отношение УАП дополнительно сравнивают со вторым пороговым значением, равным максимальной величине отношения уровня ДН антенны основного приемного канала к уровню ДН антенны дополнительного приемного канала в пределах области пеленгации, принимают решение о пеленгации постановщика активных помех, если полученное отношение УАП превышает первое пороговое значение и не превышает второе пороговое значение (патент №2601876 кл. МПК G01S 3/02 G01S 7/36, Опубликовано: 10.11.2016).
Для определения угловых координат источника помех нет необходимости использования нескольких пар территориально распределенных измерителей и координационного центра, данный способ позволяет определить координаты пространственного положения помехи с помощью одной РЛС.
Однако этому способу присущи следующие недостатки:
- узкий сектор пеленгации, так как определение положения помехи происходит только в окрестности главного лепестка диаграммы направленности антенны. Размеры области пеленгации могут определяться, например, исходя из размеров луча основного приемного канала по уровню половинной мощности (патент №2601876 кл. МПК G01S 3/02 G01S 7/36, Опубликовано: 10.11.2016);
- невозможность одновременной пеленгации помехи и определение координат цели (невозможность отличить цель от помехи, так как и цель и помеха могут удовлетворять критериям отбора (первому - пороговое значение, равное минимальной величине отношения уровня ДН антенны основного приемного канала к уровню ДН дополнительного приемного канала в пределах области пеленгации, задаваемой в окрестности главного лепестка ДН антенны основного приемного канала, и второму - пороговое значение, равное максимальной величине отношения уровня ДН антенны основного приемного канала к уровню ДН антенны дополнительного приемного канала в пределах области пеленгации)).
Технический результат предлагаемого изобретения - расширение сектора пеленгации источника помех, обеспечение возможности разделение по угловым координатам сигналы от цели и сигналы от источника помех, одновременного определения координат цели и источника помех.
Другой технический результат предлагаемого изобретения - однозначное определения координат источника помех в расширенном секторе пеленгации.
Указанный результат достигается тем, что в способе пеленгации источника помех, включающем одновременное измерение азимутального положения цели с помощью антенной системы основного канала, имеющей ДН с узким главным лепестком и источника помех с помощью антенных систем дополнительных каналов, имеющих разностные ДН с нулем в направлении главного лепестка антенной системы основного канала, причем определение азимутального положения источника помех осуществляется с помощью разностных ДН антенных систем дополнительных каналов. Определение азимутального положения источника помех осуществляется:
- измерением соотношения амплитуд сигналов, получаемых от антенных систем, имеющих разностные диаграммы направленности дополнительных каналов;
- измерением соотношения разности фаз сигналов, принимаемых с помощью антенных систем, имеющих разностные диаграммы направленности дополнительных каналов (фазовый способ или его разновидность гониометрический).
Другой технический результат достигается тем, что однозначное определение азимутального положения источника помех осуществляется с помощью разностных диаграмм направленности антенных систем дополнительных каналов, имеющих различные диаграмм направленности, т.е. используются несколько дополнительных каналов, образующих различные диаграммы направленности.
Однозначное определение азимутального положения источника помех можно осуществить с помощью разностных диаграмм направленности антенных систем дополнительных каналов, имеющих различные расстояния между фазовыми центрами антенн дополнительных каналов, т.е. использованием нескольких дополнительных каналов, имеющих антенны с различными расстояниями между фазовыми центрами антенн.
В отличие от прототипа, в котором используется антенна дополнительного приемного канала, имеющая слабонаправленную (ненаправленную) в азимутальной плоскости ДН, в предложенном способе используются несколько антенн дополнительных каналов, имеющие разностные ДН с нулем в направлении главного лепестка антенны основного канала.
Способ определения положения объекта измерением соотношения амплитуд сигналов, получаемых от антенн дополнительных каналов известен (патент №2674007 кл. МПК G01S 3/02 G01S 13/06)). Однако эти метод используется для определения положения с помощью антенн, имеющих суммарную диаграмму направленности.
Способ определения азимутального положения объекта фазовым (гониометрическим) способом также известен. (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 г. стр. 118-120). Однако этот метод используется для определения положения с помощью антенн, также имеющих суммарную диаграмму направленности.
Заявляемое устройство имеет отличительные особенности, а именно определение азимутального положения помехи производится с помощью антенн, имеющих разностную диаграмму направленности, при этом устраняется неоднозначности определения координат источника помех в расширенном секторе пеленгации. Одновременное использование антенны основного канала, имеющей диаграмму направленности с узким главным лепестком и антенн дополнительных каналов, имеющие разностные диаграммы направленности с нулем в направлении главного лепестка антенны основного канала, позволяет обеспечить одновременное измерение азимутального положения цели и источника помех, т.е. обеспечить разрешение объектов (целей и источника помех).
Таким образом, в рассмотренных известных способах пеленгации источника помех используются антенны, имеющие другие диаграммы направленности и иные определения азимутального положения источника помех.
Это позволяет сделать вывод о соответствии заявляемого изобретения критерию патентоспособности «изобретательский уровень».
Сущность изобретения будет более понятна из приведенного описания и прилагаемого к нему чертежа, на котором изображено следующее:
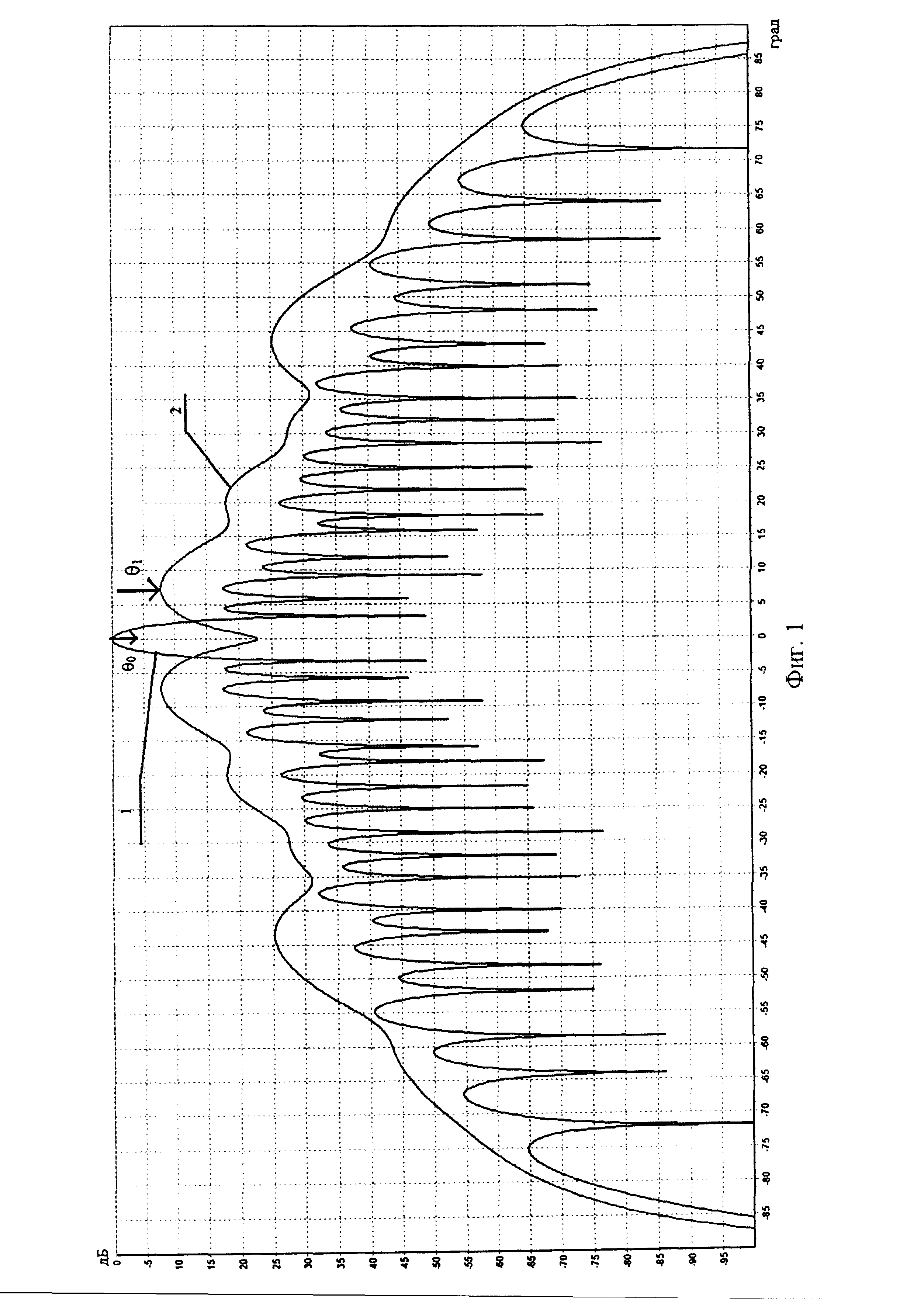
На фиг. 1 показаны:
1 - азимутальная диаграмма направленности (суммарная) основного канала с узким главным лепестком;
2 - азимутальная диаграмма направленности (разностная) антенны дополнительного канала с нулем в направлении главного лепестка диаграммы направленности антенны основного канала.
На фиг. 2 показаны разностные диаграммы направленности 3, 4, 5, 6 антенн дополнительных каналов, имеющих различные расстояния между фазовыми центрами.
Поясним принцип одновременного определения азимутального положения цели и источника помех с помощью антенны основного канала, имеющей ДН с узким главным лепестком и с помощью антенн дополнительных каналов, диаграммой направленности которой имеет «провал» (нуль) в направлении главного лепестка ДН антенны основного канала. Причем антенны дополнительного канала могут быть выполнены не только в виде отдельных антенных систем, но и могут быть организованы из фрагментов антенной системы основного канала. Каждый фрагмент такой антенной системы (либо отдельная антенная система), присоединенный к своему приемнику, образует дополнительный канал. Для создания диаграммы направленности, которая имеет «провал» (нуль) в направлении главного лепестка диаграммы направленности антенны основного канала, необходимо использовать не менее двух дополнительных каналов.
На передачу формируется луч с суммарной остронаправленной диаграммой направленности. На прием, так как фрагмент антенной системы присоединен к своему приемнику, можно сформировать, как суммарную диаграмму направленности (антенная система основного канала), так и разностные (антенные системы дополнительного канала). Так в РЛС 55Ж6 антенна дальномера состоит из 5-ти фрагментов. На передачу формируется суммарная остронаправленная диаграмма направленности. На прием сигналы фрагментов (после усиления в широкополосных антенных УВЧ) используются для формирования суммарной остронаправленной диаграммы направленности (антенна основного канала), и других (компенсационных) диаграмм направленности (Зачепицкий А.А. Путь к трем координатам, журнал ВОЗДУШНО-КОСМИЧЕСКАЯ ОБОРОНА, вып. 4 2007 г.). Из этих же сигналов формируются разностные диаграммы направленности (антенны дополнительных каналов). Сигналы, полученные от антенных систем с различными ДН используются для получения необходимой информации.
На Фиг. 1 показаны: 1 - азимутальная диаграмма направленности (суммарная) основного канала с узким главным лепестком и 2 - азимутальная диаграмма направленности (разностная) антенны дополнительного канала с нулем в направлении главного лепестка диаграммы направленности антенны основного канала, полученная с использованием фрагментов №2, №3 или фрагментов №4, №3 РЛС 55Ж6 (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 144).
Пусть цель расположена на некотором угле θ0, показанном на графиках стрелкой. Источник помех расположен на некотором произвольном угле θ1, показанном на графиках стрелкой.
Из диаграмм 1, 2 (фиг. 1) видно, что отраженный от цели сигнал, принимаемый главным лепестком ДН антенны основного канала, имеет уровень превышающий уровень сигналов, принимаемыми антеннами дополнительных каналов, так как, в направлении главного лепестка ДН антенны основного канала ДН антенн дополнительных каналов имеют провалы. Это позволяет определить координаты цели. Помеховый сигнал, принимаемый антеннами дополнительных каналов, имеет уровень превышающий уровень сигналов, принимаемый главным лепестком ДН антенны основного канала. Сравнивая полученные при различных разностных диаграммах направленности уровни сигналов источника помех (например, сравнивая диаграммы направленности дополнительных каналов 3, 4 (Фиг. 2)), можно определить по измеренному значению соотношению амплитуд сигналов угловую координату источника помехи.
Это позволяет разделить по угловым координатам сигналы от цели, которая расположена на угле θ0, и сигналы от источника помех, который имеет другую угловую координату (θ1) одновременно определить координаты цели (по главному лепестку ДН антенны основного канала) и источника помех (с использованием диаграмм направленности дополнительных каналов).
При этом сектор пеленгации значительно шире главного лепестка ДН антенны основного канала.
Для определения азимутального положения источника помех можно использовать также фазовый метод или его разновидность - гониометрический метод (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 123-129). В этом методе измеряется разность фаз электромагнитных колебаний сигналов источника помех, принимаемых, антеннами системами дополнительных каналов, расположенных на некотором расстоянии. Это расстояние называется базой. Разность фаз электромагнитных колебаний сигналов, принимаемых антеннами системами, зависит от углового положения источника сигнала, следовательно, по измеренной разности фаз определяется азимутальное положение источника помех (θ1).
Кроме того, в том случае, когда при измерении положения одного источника сигнала (помехи) присутствует и другой источник сигнала (цели), уровни которых сравнимы, возникает ошибка в измерении положения первого источника сигнала (помехи).
С целью исключения внесения ошибки при определении азимутального положения источника помех (θ1), исключения влияния сигнала, отраженного от цели, азимутальное положение которой θ0, измеряется разность фаз принимаемых сигналов антеннами дополнительных каналов, имеющие разностные ДН с нулем в направлении главного лепестка антенны основного канала (см. Фиг. 1).
На Фиг. 1 показана разностная диаграмма направленности 2, полученная с использованием фрагментов №2, №3 (фрагментов №4, №3) РЛС 55Ж6 (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 144). Данные диаграммы направленности имеют «провалы» в направлении главного лепестка антенны основного канала и расположены на некотором расстоянии друг от друга. Для определения азимутального положения источника помех измеряется разность фаз электромагнитных колебаний сигналов источника помех, приходящих на эти антенные системы, (одна получена с использованием фрагментов №2, №3, другая получена с использованием фрагментов №3, №4). По измеренной разности фаз определяется азимутальное положение источника помех. Определение азимутального положения цели производится также как в предыдущем способе.
Таким образом, использование предложенных способов (сравнение амплитуд сигналов, получаемых от антенных систем дополнительных каналов и фазовый метод) позволяет:
- обеспечить возможность одновременного определения координат цели и источника помех, т.е. обеспечить разрешение цели и сигнала помехи;
- расширить сектор пеленгации (определение положения помехи происходит вне узкого главного лепестка диаграммы направленности антенны).
Однако, этим методам (методу с использованием измерения соотношения амплитуд сигналов, получаемых от антенных систем дополнительных каналов и фазовому) методу присущи неоднозначность отсчета. Пусть источник помех расположен под углом равным 5,7 град. Так при использования метода измерения соотношения амплитуд сигналов, получаемых от антенных систем дополнительных каналов, по измеренному соотношению амплитуд эхо-сигналов и по известной форме диаграмм направленности 3 и 4 определяется набор азимутальных углов (2,9; 7,2; 8,6; 10,7; 20,5; 21,5; 22,6; 27,5; 28,3; 30,8; 33,6; 42,1; 45; 49; 60,9; 66,5; и диапазоне углов 72,5-75,1), для которых отношение сигналов имеет такое же значение, как и измеренное (см. Фиг. 2).
Фазовый метод также не дает однозначное значение угловой координаты источника помехи (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 128-129) Однозначное определение угловой координаты возможно только в «рабочем участке», величина которого зависит от расстояния (базы) между фазовыми центрами (центрами излучения) (Антенны, Г.Т. Марков, Д.М. Сазонов, изд. второе, М «Энергия» 1975, стр 140…145) антенн дополнительных каналов. Так при использовании предложенного способа для РЛС 55Ж6 (для формирования разностной диаграммы направленности используются фрагменты №2, №3 и №4, №3) сектор однозначной пеленгации составит 11,77 град.
Для устранения неоднозначности определения координат источника помех при помощи метода измерения соотношения амплитуд сигналов в расширенном секторе пеленгации, необходимо использовать несколько антенн дополнительных каналов, имеющих различные формы диаграммы направленности. На фиг. 2 представлен набор диаграмм направленности (диаграммы направленности 3, 4, 5, 6 дополнительных каналов). При дополнительном использовании диаграммы 5 получим третий набор углов места, при которых совпадение найденных углов места наблюдается кроме истинного положения цели только при двух значениях угла (42,1; 49 град.). При использовании еще одной диаграммы 6 получим набор углов места, при которых совпадение найденных углов места наблюдается только в точке истинного положения цели
Для устранения неоднозначности определения координат источника помех с помощи фазового метода, в расширенном секторе пеленгации, необходимо использовать несколько антенн дополнительных каналов, имеющих различные расстояния между фазовыми центрами (центрами излучения) антенн дополнительных каналов, т.е. использовать несколько антенн дополнительных каналов, имеющих различные базы. Допустим азимутальное положение источника помех - 7 градусов. При использовании антенны дополнительных каналов (фрагменты №2, №3 и №4,№3) сектор однозначной пеленгации составит 11,77 град. В этом случае источник помех может располагаться еще и на 16,77; 30,54; 42,31; 54,08; 65,85; 77,62 град. При использовании антенны дополнительных каналов (фрагменты №1, №2 и №2, №3) сектор однозначной пеленгации составит 13,77 град. В этом случае источник помех, кроме 7 град, может располагаться на 20,77; 34,54; 48,31; 62,08; 75,85 град. Отсюда видно, что точное совпадение измеренных углов наблюдается только в точке истинного положения источника помех.
Для устранения неоднозначности определения координат источника помех можно использовать совместно с методом измерения соотношения амплитуд сигналов и фазовый метод.
Вращение антенной системы также позволяет устранить неоднозначности определения координат источника помех.
Так анализ изменения (при нескольких положениях антенной системы) измеряемых соотношений амплитуд сигналов по известным формам диаграмм направленности позволяет однозначно определить угловые координаты источника помех. По анализу изменения фаз сигналов или разности фаз принимаемых сигналов можно также однозначно определить угловые координаты источника помех.
Изменять расстояние между фазовыми центрами антенн дополнительных каналов можно не только путем использования других фрагментов, имеющих различное относительно друг друга местоположение, но и при использовании одних и тех же фрагментов, но имеющих различные амплитудно-фазовые распределения.
Таким образом, использование нескольких антенн дополнительных каналов позволяет устранить неоднозначность отсчета угловых координат источника помех и еще больше расширить (практически до 180 град.) сектор пеленгации:
После определения угловых координат источника помех суммарную диаграмму направленности (антенна основного канала) можно изменить таким образом, что в направлении источника помех может быть выставлен нуль суммарной диаграммы направленности.
Дополнительным преимуществом данного способа, кроме определения координат источника помех, является возможность более точного, чем амплитудная пеленгация по максимуму, определение координат цели. Это достигается за счет использования метода амплитудно-разностной пеленгации (Основы радиолокации Учебник для вузов Финкельштейн, 2-е изд., М., Радио и связь, 1983 стр. 424-428).
Использование данного изобретения позволяет создать РЛС, которая обеспечивает:
- возможность одновременного точного определения координат цели и источника помех, т.е. обеспечивает разрешение цели и сигнала помехи;
- пеленгацию помехи в расширенном секторе,
- устранение неоднозначности определения координат источника помех;
- возможность более точного, чем амплитудная пеленгация по максимуму, определения координат цели.
Реферат
Изобретение относится к области радиолокации и может использоваться в радиолокационных станциях (РЛС) для пеленгации источника активных помех в случае, когда передатчик активных помех не совмещен с прикрываемым объектом, воздействуя через боковые лепестки диаграммы направленности (ДН) подавляемой РЛС. Технический результат заключается в расширении сектора пеленгации источника помех, обеспечении возможности разделения по угловым координатам сигналов от цели и сигналов от источника помех, одновременном определении координат цели и источника помех, а также в однозначном определении координат источника помех в расширенном секторе пеленгации. Для этого при пеленгации источника помех осуществляют одновременное измерение азимутального положения цели с помощью антенной системы основного канала, имеющей ДН с узким главным лепестком, и источника помех с помощью антенных систем дополнительных каналов, имеющих разностные ДН с нулем в направлении главного лепестка антенной системы основного канала. При этом определение азимутального положения источника помех осуществляется с помощью разностных ДН антенных систем дополнительных каналов. Определение азимутального положения источника помех осуществляется измерением соотношения амплитуд сигналов, получаемых от антенных систем, имеющих разностные диаграммы направленности, дополнительных каналов, или измерением соотношения разности фаз сигналов, принимаемых с помощью антенных систем, имеющих разностные диаграммы направленности, дополнительных каналов (фазовый способ или его разновидность гониометрический). 2 н. и 2 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления
Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления
Способ измерения угла места радиолокационных целей, находящихся на больших углах места
Комментарии