Способ определения местоположения сканирующей рлс пассивным многолучевым пеленгатором - RU2758832C1
Код документа: RU2758832C1
Чертежи

Описание
Изобретение относится к области радиолокации и предназначено для определения местоположения радиолокационной станции (РЛС) секторного обзора.
В настоящее время для некоторых измерительных комплексов (например, систем определения местоположения объектов радиотехническими методами, радионавигации и комплексов радиоэлектронного подавления) актуальна задача оперативного определения дальности до цели, получаемых пассивной автономной угломерной системой.
Известен способ пассивного определения дальности до цели с использованием сигнала обзорной сканирующей РЛС (см. 1. патент РФ на изобретение №2217772, МПК G01S 3/02, опубл. 02.11.2001).
Сущность способа заключается в следующем. Измеряют разность азимутов приемной позиции и цели относительно РЛС, разность азимутов РЛС и цели относительно приемной позиции, разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция, угол места цели, угол места РЛС с помощью направленной антенны приемной позиции, что позволяет определить горизонтальную дальность цели расчетным способом.
Для осуществления данного способа необходимо измерение разности азимутов приемной позиции и цели относительно РЛС, что может быть реализовано при осуществлении РЛС регулярного кругового обзора. Однако, если разведываемая РЛС работает в режиме секторного обзора, то реализация данного способа становится проблематичной, поскольку в этом случае невозможно определить период обзора (сканирования), а следовательно и разность азимутов РЛС и цели относительно приемной позиции.
Известен способ (см. 2. патент РФ на изобретение №2457505, МПК G01S 5/04, опубл. 27.07.2012) определения местоположения работающей РЛС, имеющей сканирующую направленную антенну.
Рассматриваемый способ определения местоположения РЛС реализуется следующим образом. Предполагается, что приемный пункт имеет слабонаправленные антенны и способен принимать как прямые, так и отраженные от объектов сигналы и измерять углы прихода прямого и отраженного сигналов и временную задержку между ними, позволяющую определить разность длин путей прямого и отраженного сигнала. Дальность до источника радиоизлучения оценивается путем сравнения действительных координат, занесенных в память компьютера, с рассчитанными. За оценку дальности принимается такое ее значение, при котором разность между рассчитанными и заложенными в память компьютера координатами минимальна.
Устройство, реализующее данный способ, содержит антенну и приемное устройство, вход которого соединен с выходом антенны, аналого-цифровой преобразователь, устройство обнаружения сигналов, устройство выделения прямых сигналов РЛС, счетчик временных интервалов и устройство памяти, каждое из которых имеет один вход и один выход, и компьютер, вход которого соединен с выходом устройства памяти, вторую антенну и второе приемное устройство, вход которого соединен с выходом второй антенны, второй аналого-цифровой преобразователь, содержащий два входа, первый из которых соединен с выходом второго приемного устройства, и один выход, генератор тактовых импульсов, имеющий один выход, управляемый логический вентиль, имеющий два входа, первый из которых соединен с выходом счетчика временных интервалов, второй - с выходом устройства обнаружения сигналов, и один выход, моноимпульсный вычислитель пеленга, имеющий четыре входа, первый из которых соединен с выходом устройства обнаружения сигналов, второй и третий - с выходами первого и второго аналого-цифровых преобразователей, четвертый - с выходом генератора тактовых импульсов, и один выход, в первом аналого-цифровом преобразователе дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом первого приемного устройства, в устройстве обнаружения сигналов дополнительно образованы второй и третий входы, соединенные соответственно с выходом второго аналого-цифрового преобразователя и выходом генератора тактовых импульсов, в устройстве памяти дополнительно образованы второй, третий и четвертый входы, соединенные соответственно с выходом устройства выделения прямых сигналов РЛС, выходом моноимпульсного вычислителя пеленга и выходом генератора тактовых импульсов, в устройстве выделения прямых сигналов РЛС дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, в счетчике временных интервалов дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом устройства обнаружения сигналов, второй вход второго аналого-цифрового преобразователя соединен с выходом генератора тактовых импульсов, первый вход устройства обнаружения сигналов - с выходом первого аналого-цифрового преобразователя, первый вход устройства выделения прямых сигналов РЛС - с выходом моноимпульсного вычислителя пеленга и первый вход устройства памяти - с выходом управляемого логического вентиля.
Однако в данном способе необходимо иметь точную априорную информацию о координатах переотражающих объектов, что на море принципиально невозможно, а на суше требует выполнения предварительных трудоемких измерений. Кроме того, в способе предполагается нахождение РЛС только в пределах лучей многолучевого пеленгатора, обусловленное использованием моноимпульсного метода пеленгации, что снижает функциональные возможности способа.
Известен способ определения дальности до излучающей обзорной радиолокационной станции (см. 3. Патент РФ на изобретение №2444748, МПК G01S 5/02, опубл. 10.03.2012), включающий обнаружение и пеленгование сигналов радиолокационных станций (РЛС) радиопеленгатором, измерение параметров сигналов РЛС, в том числе времени прихода отдельных импульсов и их амплитуд, пачечных сигналов и периода сканирования антенны РЛС, обнаружение сигналов дополнительным приемным пунктом, антенна которого образует с антенной пеленгатора измерительную базу, или дополнительным приемным пунктом, измерительную базу которого образуют за счет перемещения носителя радиопеленгатора, измерение параметров сигналов и их идентификация с сигналами, обнаруженными пеленгатором, при этом пачечные сигналы, обнаруженные пеленгатором и дополнительным приемным пунктом, нормируют по амплитуде и запоминают, по измеренным временным и нормированным амплитудным характеристикам пачек сигналов рассчитывают обусловленное проходом сканирующего луча антенны РЛС по измерительной базе время запаздывания между пачками сигналов как среднее значение временного интервала, который вычисляется в каждом периоде повторения сигналов РЛС как отношение разности времен прихода текущего и предыдущего импульсов одной пачки к разности их нормированных амплитуд, умноженное на разность нормированных амплитуд текущих импульсов обеих пачек сигналов, по найденному времени запаздывания между пачками сигналов и измеренному ранее периоду сканирования антенны РЛС определяют угол поворота антенны РЛС, соответствующий данной измерительной базе и дальности до РЛС, и вычисляют дальность до РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС, выраженному в радианах, при этом в случае установления промахов в определении дальности исключают их и повторяют вычисление времени запаздывания между пачками сигналов, угла поворота антенны РЛС и дальности до РЛС.
Для реализации данного способа необходимы два пункта приема - основной и дополнительный, что усложняет реализацию, а угол поворота антенны РЛС, соответствующий данной измерительной базе, имеет малое значение, что обуславливает низкую точность измерения дальности до источника радиоизлучения.
Известен способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором (см. 4. патент РФ на изобретение №2633962, МПК G01S 5/04, опубл. 20.10.2017), заключающийся в приеме и выделении пассивным многолучевым пеленгатором прямых импульсных сигналов РЛС, обнаружении импульсных сигналов, переотраженных подстилающей поверхностью земли или моря, и измерении временных задержек между сигналами, осуществлении приема пассивным многолучевым пеленгатором в моменты





Данный способ выбран в качестве прототипа.
Однако данный способ предназначен для определения местоположения радиолокационной станции, работающей в режиме регулярного кругового обзора пространства.
Проблема, которая существует - это возможность определения дальности до РЛС работающей только в режиме кругового обзора.
Техническим результатом изобретения является расширение функциональных возможностей способа путем обеспечения определения дальности до РЛС, работающей в режиме секторного обзора, пассивным пеленгатором.
Достижение указанного технического результата обеспечивается в предлагаемом способе определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором (ПМП), заключающемся в приеме и выделении на приемной позиции прямых импульсных сигналов РЛС, обнаружении импульсных сигналов, переотраженных подстилающей поверхностью земли или моря, и измерении временных задержек сигналов, рассеянных отражающей поверхностью не менее, чем в двух лучах пеленгатора, согласно изобретению ПМП снабжен многолучевой кольцевой антенной решеткой, при этом прием прямого импульсного сигнала, излученного боковыми лепестками ДНА упомянутой антенны РЛС, осуществляют в момент времени t1, производят измерение азимута β1, обнаружение сигналов, отраженных от подстилающей поверхности в моменты времени t2 и t3, измерение азимутов на эти локальные участки отражения β2 и β3, определение разностей расстояний




и дальность до РЛС

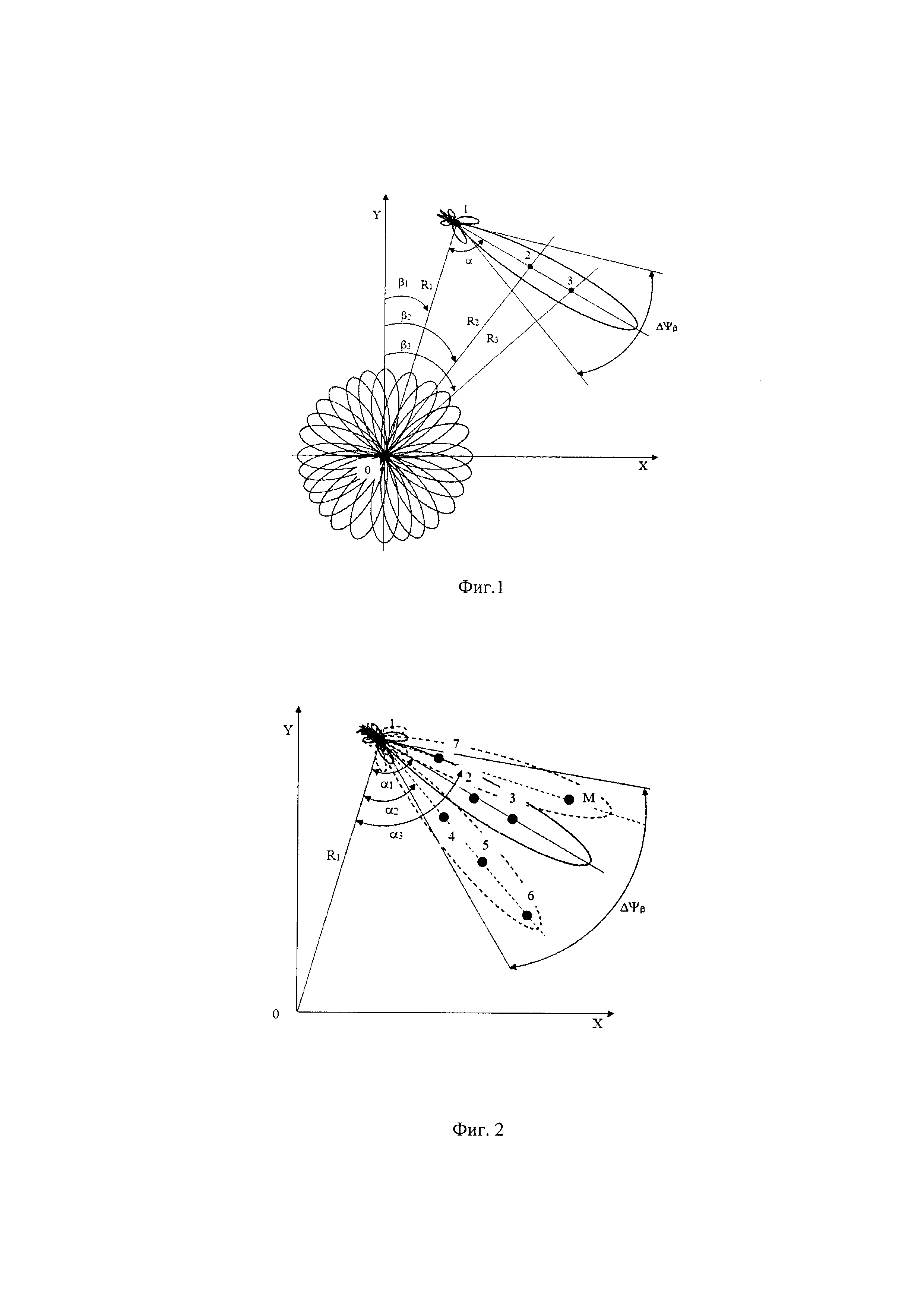
Достижение технического результата приведенными отличиями можно пояснить с использованием геометрических построений, представленных на фиг. 1, где поясняется задача определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором.
Располагая измерениями ΔR12, ΔR13, Δβ21, Δβ31, и вычисленным значением угла α выразим искомую дальность до ИРИ как


Приравняв (1) и (2) и учитывая тригонометрические тождества



Используя тригонометрическое тождество


Подстановка (4) в (1) или (2) позволяет получить искомую дальность до РЛС.
Поскольку в секторе облучения РЛС может находится М участков локального отражения, расположенных в пределах мгновенного положения ДНА и позволяющих получить измерения М-1 разностей расстояний, так и в других N угловых направлениях относительно РЛС (см. фиг. 2, где поясняется задача определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором в случае множества участков локальных отражений), то возможно осреднение результатов косвенного измерения дальности за К циклов сканирования РЛС в пределах сектора ΔΨβ (фиг. 2.)

При этом в (5) могут учитываться результаты, прошедшие предварительную отбраковку на наличие аномальных измерений (грубых погрешностей) согласно (см. 5. ГОСТ Р 8.736-2011 Государственная система обеспечения единства измерений (ГСИ). Измерения прямые многократные. Методы обработки результатов измерений. Основные положения. М.: Стандартинформ, 2019).
Применение данного способа возможно только до тех дальностей, где интенсивность рассеянного поверхностью сигнала достаточна для обеспечения приемлемой величины отношения сигнал/шум импульсов на выходах, как минимум, трех каналов обнаружения пеленгатора.
Как следует из вышесказанного в предложенном способе определение местоположения РЛС с антенной системой, сканирующей в секторе, выполняется по детерминированным соотношениям, что исключает вероятностную оценку местоположения и тем самым повышает достоверность результатов измерений.
Сущность способа поясняется кроме упомянутых выше фиг. 1 и фиг. 2 следующими фигурами:
На фиг. 3 приведена структурная схема устройства определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором.
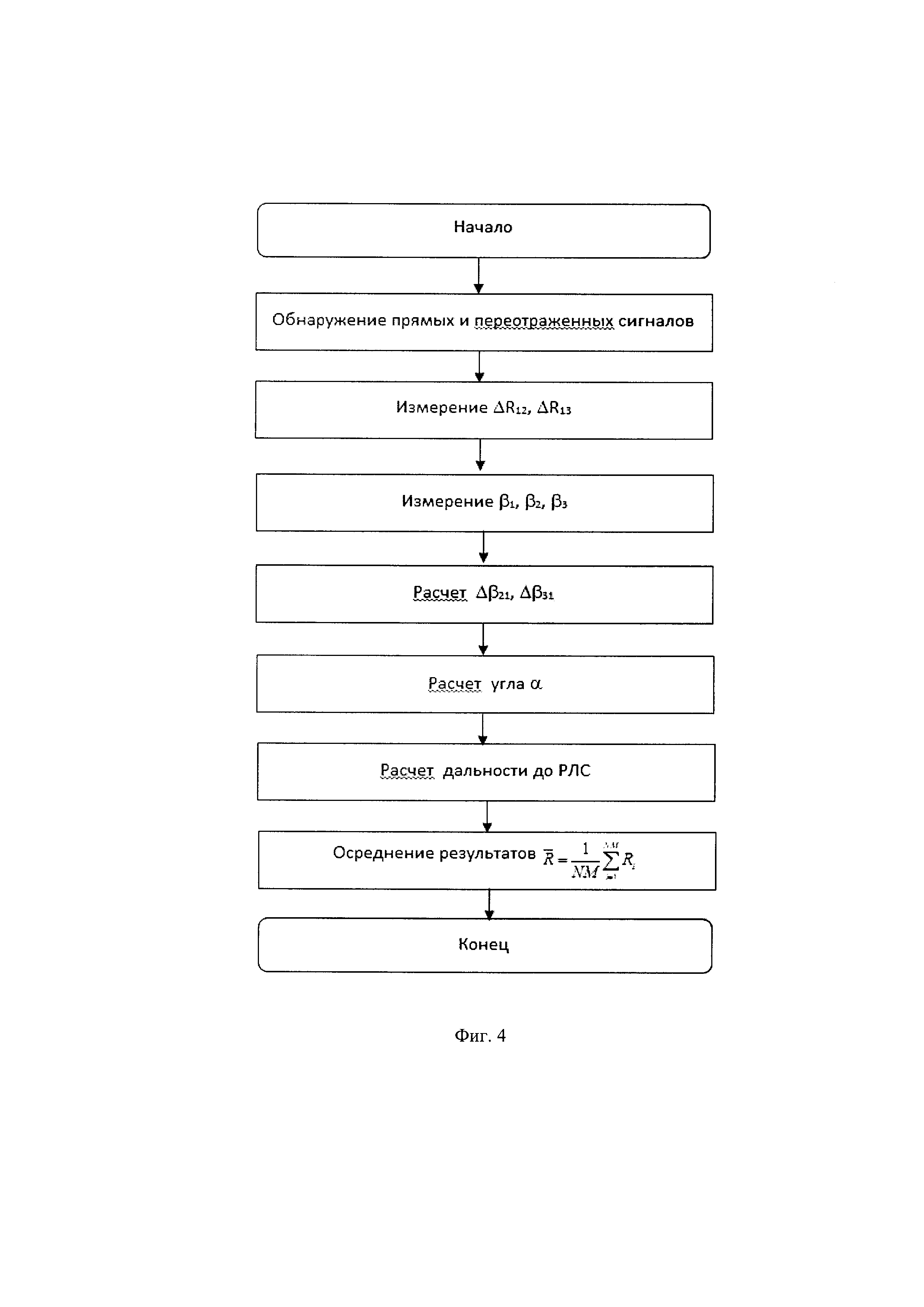
На фиг. 4 приведена блок-схема алгоритма определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором.
В примере структурной схемы устройства для реализации предлагаемого способа (фиг. 3) показано:
1.1-1.N - приемные антенны (АНТ) 1÷N;
2.1-2.N - приемные устройства (ПРМ) 1÷N;
3.1-3.N - устройства обнаружения сигнала (УОС) 1÷N;
4.1-4.m - измерители разности расстояний (ИЗМ);
5 - вычислительное устройство азимута (ВЧУА);
6 - вычислительное устройство (ВЧУ).
При этом выходы антенн (АНТ) 1.1-1.N соединены с входами соответствующих приемных устройств (ПРМ) 2.1-2.N, выходы которых соединены со входами соответствующих устройств обнаружения сигналов (УОС) 3.1-3.N, выходы всех обнаружителей подключены к соответствующим первым и вторым входам измерителей разностей расстояний (ИЗМ) 4.1-4.m и к 1 и N входам вычислительного устройства 5 азимута (ВЧУА), выходы измерителей разностей расстояний (ИЗМ) 4.1-4.m и выход вычислительного устройства 5 азимута (ВЧУА) соединены с 1÷m+1 входами вычислительного устройства (ВЧУ) 6 соответственно.
Предлагаемый способ осуществляется в приведенном на фиг. 3 устройстве следующим образом.
Пусть приемными антеннами (АНТ) 1.1÷1.N, образующими кольцевую антенную решетку, приняты прямые и переотраженные участками локального отражения сигналы, излученные РЛС с ДНА сканирующей в секторе ΔΨβ (фиг. 1). Данные сигналы усиливаются в соответствующих каналах приемных устройств (ПРМ) 2.1÷2.N до уровня превышения порога обнаружения в устройствах обнаружения сигнала (УОС) 3.1÷3.N, что позволяет принять сигнал, излученный боковыми лепестками ДНА РЛС в момент времени




Выходы устройств обнаружения сигнала (УОС) 3.1÷3.N также подключены ко входам вычислительного устройства азимута (ВЧУА) 5, где происходит вычисление следующих углов азимута: β1 - азимута на РЛС, β2 - азимута на первый участок локального отражения, β3 - азимута на второй участок локального отражения. Определение соответствующих азимутов по отношению к РЛС и участкам локального отражения определяется исходя из определения очередности приема сигналов t1


Последовательность данных действий приведена в упрощенной блок схеме алгоритма на фиг. 4.
Рассмотрим пример выполнения блоков предлагаемого устройства.
В качестве приемных антенн (АНТ) 1.1÷1.N, образующих кольцевую антенную решетку, могут использоваться слабонаправленные вибраторные или рупорные антенны соединенные по схемам приведенным в (см. 6. Бенесон Л.С., Журавлев В.А., Попов С.В., Постнов Г.А. Антенну решетки / под ред. Бенесона Л.С. М.: Сов радио. 368 с. 1966 г.).
В качестве приемных устройств (ПРМ) 2.1-2.N могут использоваться многоканальные матричные приемники как в (см. 7. В.В. Цветнов, В.О. Демин, А.И. Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998.-248 с. (рис. 1.8, стр. 17)).
В качестве устройств обнаружения сигнала (УОС) 3.1-3.N могут использоваться типовые схемы обнаружителей (см. 8. Бакут П.А. Радиолокационные устройства. - М.: Радиотехника, 2004, 320 с.).
Измерители разности расстояний (ИЗМ) 4.1-4.m, вычислительное устройство азимута (ВЧУА) 5 и вычислительное устройство (ВЧУ) 6 могут быть реализованы как в (см. 9. Стешенко В.Б. ПЛИС фирмы ALTERA: проектирование устройств обработки сигналов. - М.: ДОДЭКА, 2000. 128 с).
Реферат
Изобретение относится к области радиолокации и предназначено для определения местоположения радиолокационной станции (РЛС) секторного обзора. Техническим результатом изобретения является расширение функциональных возможностей путем обеспечения определения дальности до РЛС, имеющей диаграмму направленности антенны (ДНА), сканирующую в заданном секторе. В заявленном способе пассивным многолучевым пеленгатором осуществляют измерение как минимум двух разностей времени прихода сигналов, излученных боковыми лепестками антенной системы РЛС, и сигналов, переизлученных локальными участками отражения земной или водной поверхности при их облучении главным лепестком ДНА, а также азимутов на РЛС и соответствующие участки локального отражения. На основании полученных первичных измерений производят косвенную оценку угла между направлением на РЛС и направлением положения ее ДНА, что в совокупности с измеренными разностями расстояний и азимутами позволяет оценить дальность до РЛС. 4 ил.
Формула





Комментарии