Энергосберегающий уравновешенный механизм, вращающаяся машина и способ применения - RU2676495C2
Код документа: RU2676495C2
Чертежи
Описание
Настоящее изобретение относится к энергосберегающему уравновешенному механизму, предназначенному для любого подходящего применения и, в частности, для вращающихся машин. Изобретение, в частности, относится к механизму с маятником и эллиптическим движением.
Настоящее изобретение также относится к вращающейся машине, например, двигателю, генератору или мешалке, содержащей по меньшей мере один такой механизм. Изобретение, в частности, относится к двигателю, содержащему несколько механизмов, размещенных последовательно и/или параллельно.
В конечном итоге настоящее изобретение относится к способу применения такого механизма.
В области механического оборудования существует множество механизмов передачи движения, таких как эпициклические зубчатые передачи или коленчатые валы, которые подходят для установки во вращающихся машинах. Тем не менее, коэффициенты полезного действия, которые достигаются общеизвестными механизмами, не являются в полной мере удовлетворительными.
Целью настоящего изобретения является предоставление механизма, позволяющего экономить энергию и повышать коэффициент полезного действия вращающейся машины.
Для достижения этой цели объектом настоящего изобретения является механизм, содержащий одну опору; первое зубчатое колесо, выполненное с возможностью вращения относительно указанной опоры вокруг первой оси; второе зубчатое колесо, выполненное с возможностью вращения относительно указанной опоры вокруг второй оси; при этом оси являются параллельными в горизонтальной или вертикальной базовой плоскости; и зубчатые колеса находятся в зацеплении друг с другом с постоянным передаточным отношением и выполнены с возможностью вращения в противоположных направлениях.
Механизм характеризуется тем, что содержит первый эксцентриковый элемент, выполненный с возможностью вращения совместно с первым зубчатым колесом и создания первого момента силы тяжести вокруг первой оси; и второй эксцентриковый элемент, выполненный с возможностью вращения совместно со вторым зубчатым колесом и создания второго момента силы тяжести вокруг второй оси; при этом моменты силы тяжести эксцентриковых элементов имеют одинаковую величину и одинаковое направление, оба из которых являются переменными в зависимости от их углового положения вокруг осей; и при этом для каждого углового положения зубчатых колес и эксцентриковых элементов вокруг осей механизм находится в равновесии в состоянии покоя.
Таким образом, изобретение позволяет уменьшить энергию, необходимую для приведения зубчатых колес во вращение, посредством уравновешивания эксцентриковых элементов и центробежных сил, которые они создают. Изобретение даже позволяет создать энергию во вращающейся машине, путем объединения нескольких синхронизированных механизмов. Механизм, таким образом, позволяет сохранить энергию, как описано в описании ниже.
Согласно преимущественным характеристикам механизма в соответствии с настоящим изобретением, которые взяты отдельно или в комбинации:
- Эксцентриковые элементы имеют одинаковую массу и одинаковые размеры.
- Зубчатые колеса содержат первое колесо, имеющее зуб, который длиннее, чем другие зубья, и второе колесо, имеющее впадину, образованную между двумя зубьями, при этом более длинный зуб и впадина совпадают в момент зацепления зубчатых колес, что обеспечивает выравнивание эксцентриковых элементов.
- Оси зубчатых колес являются горизонтальными.
- Базовая плоскость является горизонтальной.
- Базовая плоскость является вертикальной.
Предпочтительно, опора содержит основание и один маятник, подвешенный на основании и который поддерживает оси зубчатых колес. Оси выполнены с возможностью движения с маятником. Эксцентриковые элементы совершают эллиптическое движение.
Согласно первому варианту осуществления маятник подвешен на основании посредством шарнирно закрепленных стержней. Этот вариант осуществления является преимущественным, когда базовая плоскость, содержащая ось зубчатого колеса, является горизонтальной.
Предпочтительно, механизм содержит передаточный вал, имеющий ось, находящуюся на одной линии с верхними шарнирами соединительных тяг. Первое расстояние задано между дальним концом каждого эксцентрикового элемента и соответствующей осью вращения. Второе расстояние задано равным межцентровому расстоянию соединительных подвесных стержней. Первое расстояние меньше, чем второе расстояние, чтобы эксцентриковые элементы проходили под передаточным валом.
Согласно второму варианту осуществления маятник непосредственно подвешен на основании. Этот вариант осуществления является преимущественным, когда базовая плоскость, содержащая ось зубчатого колеса, является вертикальной.
Предпочтительно, механизм содержит передаточный вал, имеющий ось, находящуюся на одной линии с верхним шарниром маятника. Первое расстояние задано между дальним концом каждого эксцентрикового элемента и соответствующей осью вращения. Второе расстояние задано равным межцентровому расстоянию соединительных подвесных стержней. Первое расстояние меньше, чем второе расстояние, чтобы эксцентриковые элементы проходили под передаточным валом.
Настоящее изобретение также относится к вращающейся машине, содержащей по меньшей мере один механизм, такой как описан выше.
Вращающаяся машина предпочтительно представляет собой машину для выработки или преобразования энергии, которая обеспечивает повышенный коэффициент полезного действия. Преимущественно, указанная машина не содержит коленчатый вал.
В качестве не исчерпывающих примеров вращающаяся машина может представлять собой двигатель, генератор, мешалку, центрифугу, компрессор, насос или турбину.
Когда машина представляет собой двигатель внутреннего сгорания, эксцентриковые элементы, которыми оснащен механизм, встречаются в двух положениях с максимальной центробежной силой, каждое из которых соответствует сгоранию газа внутри двигателя.
Согласно предпочтительному варианту осуществления, машина содержит по меньшей мере один маятниковый механизм, при этом эксцентриковые элементы совершают эллиптическое движение.
Согласно преимущественному варианту осуществления машина содержит по меньшей мере одну пару маятниковых механизмов, расположенных последовательно и синхронизированных. Механизмы выровнены и выполнены с возможностью перемещения в противоположных фазах.
Каждый механизм содержит свой собственный передаточный вал. Когда маятник подвешен на основании посредством шарнирно закрепленных соединительных стержней, передаточный вал имеет ось, находящуюся на одной линии с верхними шарнирами шарнирно закрепленных стержней. Когда маятник подвешен непосредственно на основании, передаточный вал имеет ось, находящуюся на одной линии с верхним шарниром маятника.
Преимущественно, машина содержит соединительную тягу, соединенную с механизмами, размещенными последовательно. Соединительный стержень является неподвижным в горизонтальном направлении и подвижным в вертикальном направлении во время движения механизмов.
Согласно другому преимущественному варианту осуществления машина содержит несколько маятниковых механизмов, размещенных параллельно и синхронизированных. Предпочтительно, количество механизмов, расположенных параллельно, является четным, что облегчает их синхронизацию.
Машина содержит один передаточный вал, соединенный с различными механизмами, расположенными параллельно в ряд.
Согласно другому преимущественному варианту осуществления машина содержит несколько пар маятниковых механизмов. Пары расположены параллельно и синхронизированы друг с другом. В каждой паре механизмы расположены последовательно и синхронизированы.
Машина содержит два передаточных вала, каждый из которых соединен с различными механизмами, расположенными параллельно в ряду.
Согласно другому преимущественному варианту осуществления машина представляет собой двухтактный двигатель, содержащий два маятниковых механизма. Первые два эксцентриковых элемента расположены с интервалами в половину оборота и вторые два эксцентриковых элемента расположены с интервалами в половину оборота.
Согласно другому преимущественному варианту осуществления машина представляет собой четырехтактный двигатель, содержащий четыре механизма. Первые четыре эксцентриковых элемента расположены с интервалами в четверть оборота и, аналогично, вторые четыре эксцентриковых элемента расположены с интервалами в четверть оборота.
Предпочтительно, когда машина содержит несколько маятниковых механизмов, основание является общим для всех маятников. Другими словами, все маятники подвешены на одном основании.
Также предпочтительно, механизм содержит средства запуска механизма или механизмов, включающие, например, цепь или систему передач, предназначенные для приведения одного из зубчатых колес во вращение.
Кроме того, средства запуска могут содержать двигатель для способствования запуску или кривошип для механического запуска механизма.
Согласно конкретному варианту осуществления машина не имеет специальных средств запуска механизма или маятниковых механизмов. В этом случае запуск механизма или механизмов можно осуществить путем простого толкания маятника или маятников или одного из эксцентриковых элементов.
Преимущественно, машина содержит средства для сбора энергии, когда механизм находится в работе, например в виде генератора. В этом случае машина предпочтительно содержит средства для запуска механизма, включая двигатель. Это позволяет преодолеть сопротивление при запуске, связанное с наличием генератора.
Предмет настоящего изобретения также относится к способу применения механизма, такого как описан выше, включающему следующие последовательные этапы:
- этап позиционирования эксцентриковых элементов один относительно другого и относительно зубчатых колес таким образом, чтобы моменты силы тяжести эксцентриковых элементов имели одинаковую величину и одинаковое направление, оба из которых являются переменными в зависимости от их углового положения вокруг осей, при этом для каждого углового положения зубчатых колес и эксцентриковых элементов относительно осей механизм находится в равновесии в состоянии покоя;
- этап приведения во вращение зубчатых колес и эксцентриковых элементов вокруг осей, в котором механизм выходит из равновесия и приходит в движение; и
- этап работы, в котором вращение эксцентриковых элементов в направлении вокруг осей создает центробежную силу в механизме.
Настоящее изобретение станет более понятным после прочтения последующего описания, приведенного исключительно в качестве не исчерпывающего примера, со ссылками на прилагаемые к нему графические материалы, на которых:
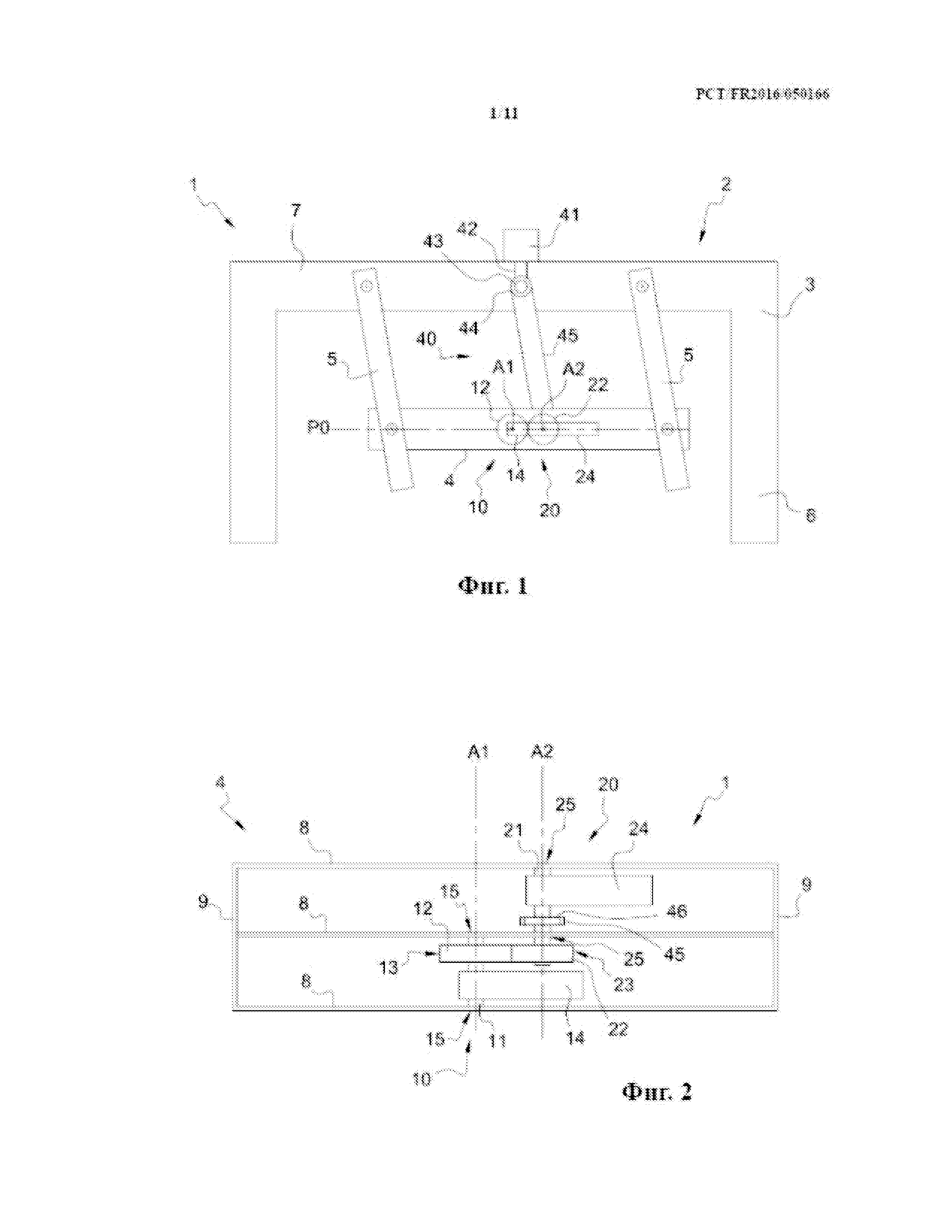
- фиг. 1 представляет собой вид сбоку механизма согласно первому варианту осуществления настоящего изобретения, содержащего опору с маятником, два зубчатых колеса и два эксцентриковых элемента;
- фиг. 2 представляет собой частичный вид сверху в большем масштабе маятника, которым оснащен механизм на фиг. 1;
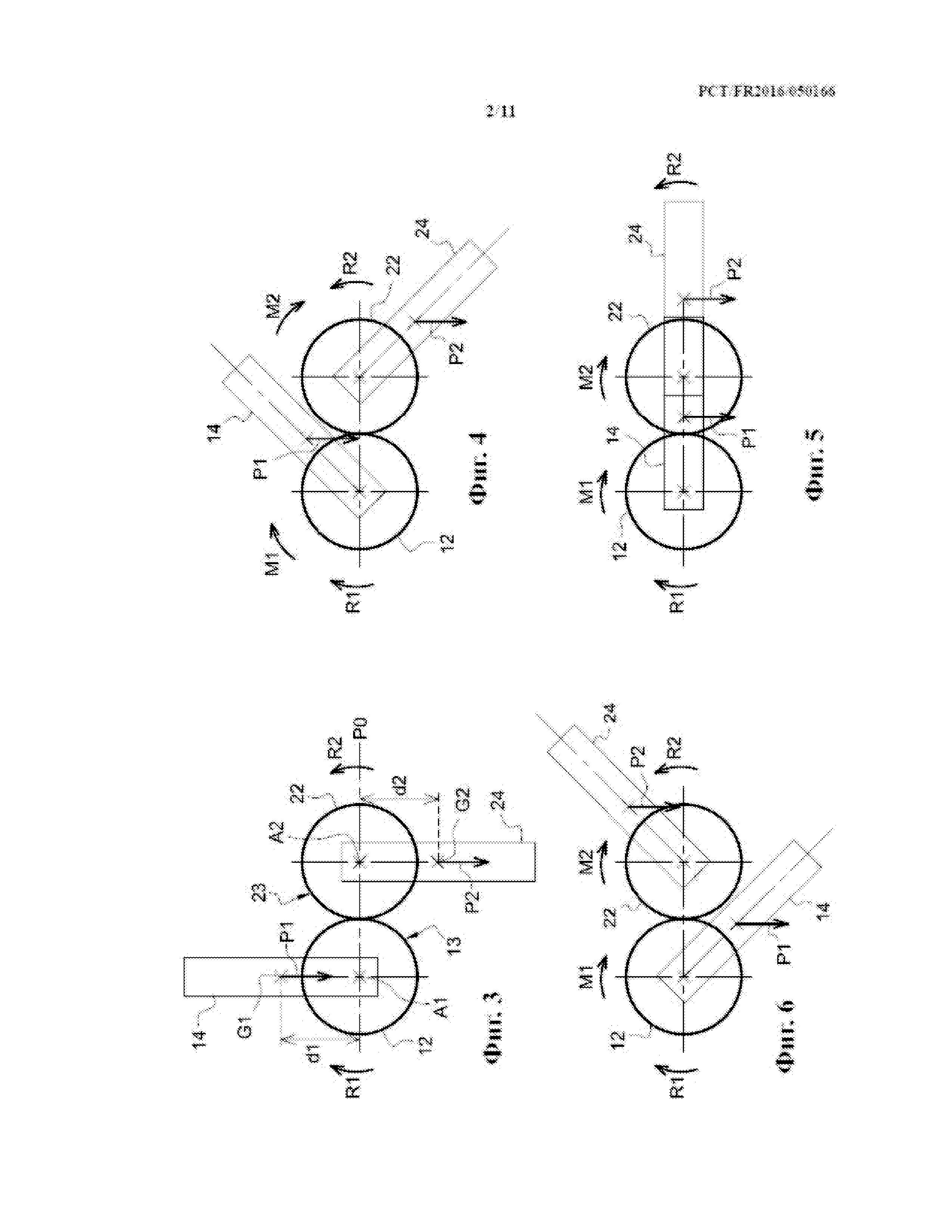
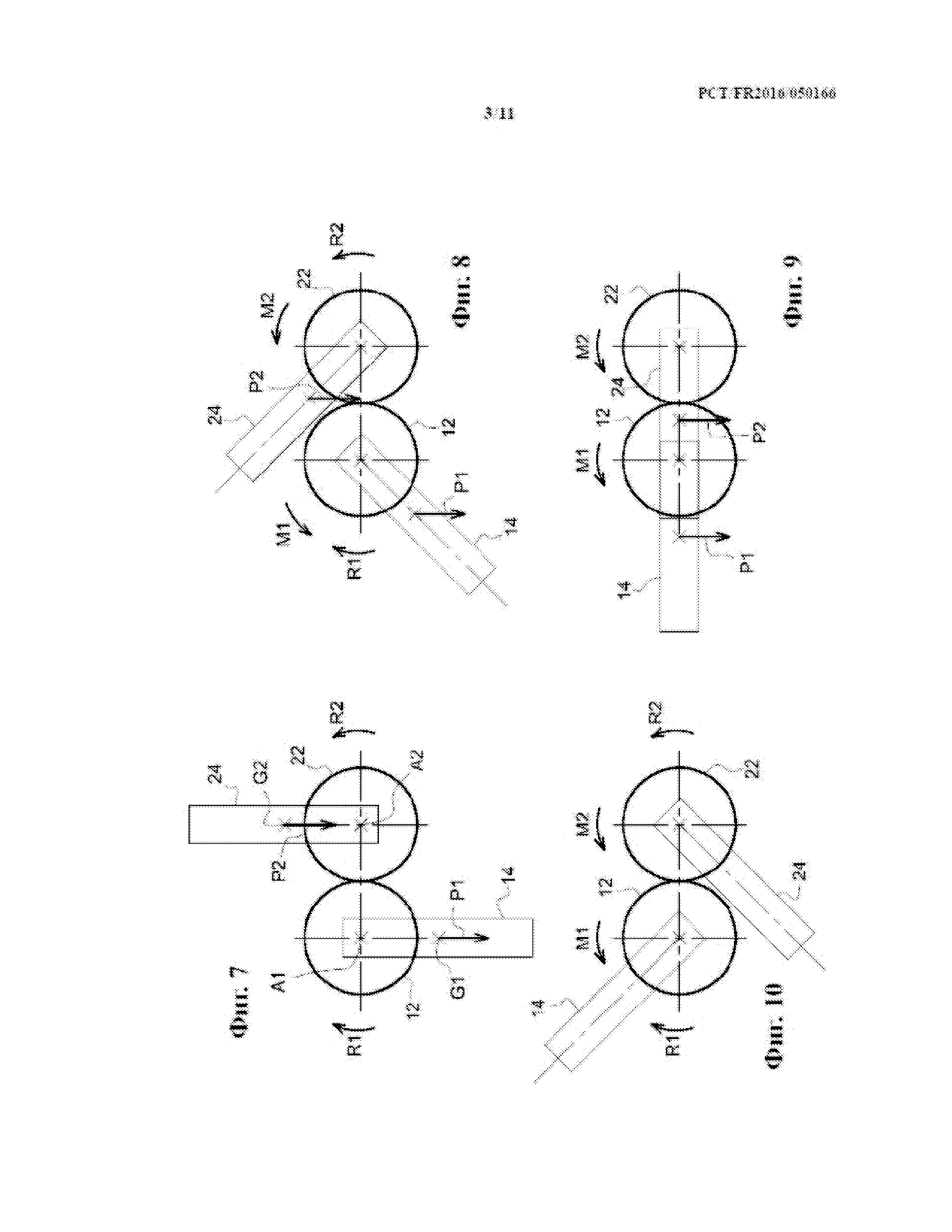
- на фиг. 3–10 показан аналог механизма, показанного на фиг. 1, изображающий движения зубчатых колес и эксцентриковых элементов;
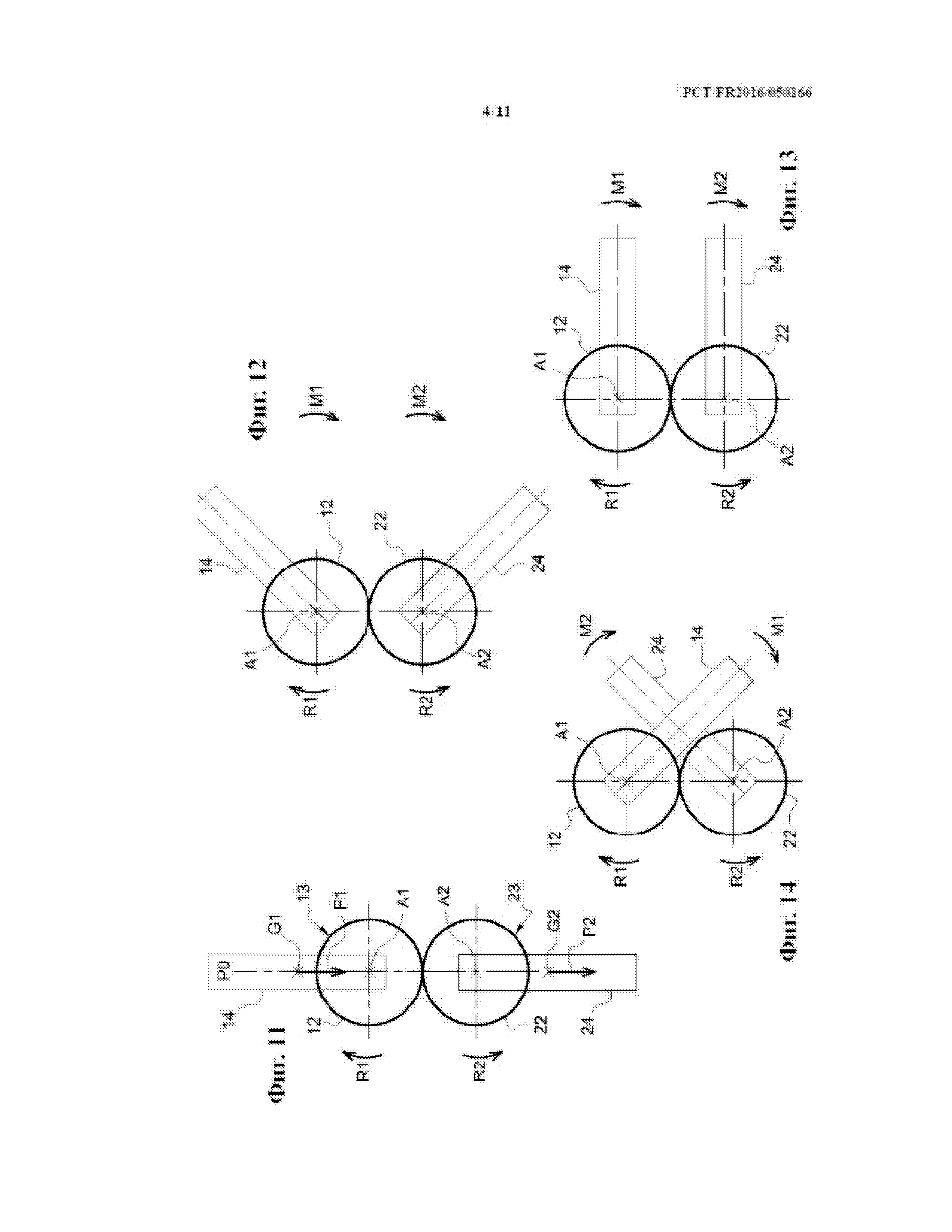
- на фиг. 11–14 показаны схематические изображения, аналогичные фиг. 3–6, для механизма согласно второму варианту осуществления настоящего изобретения;
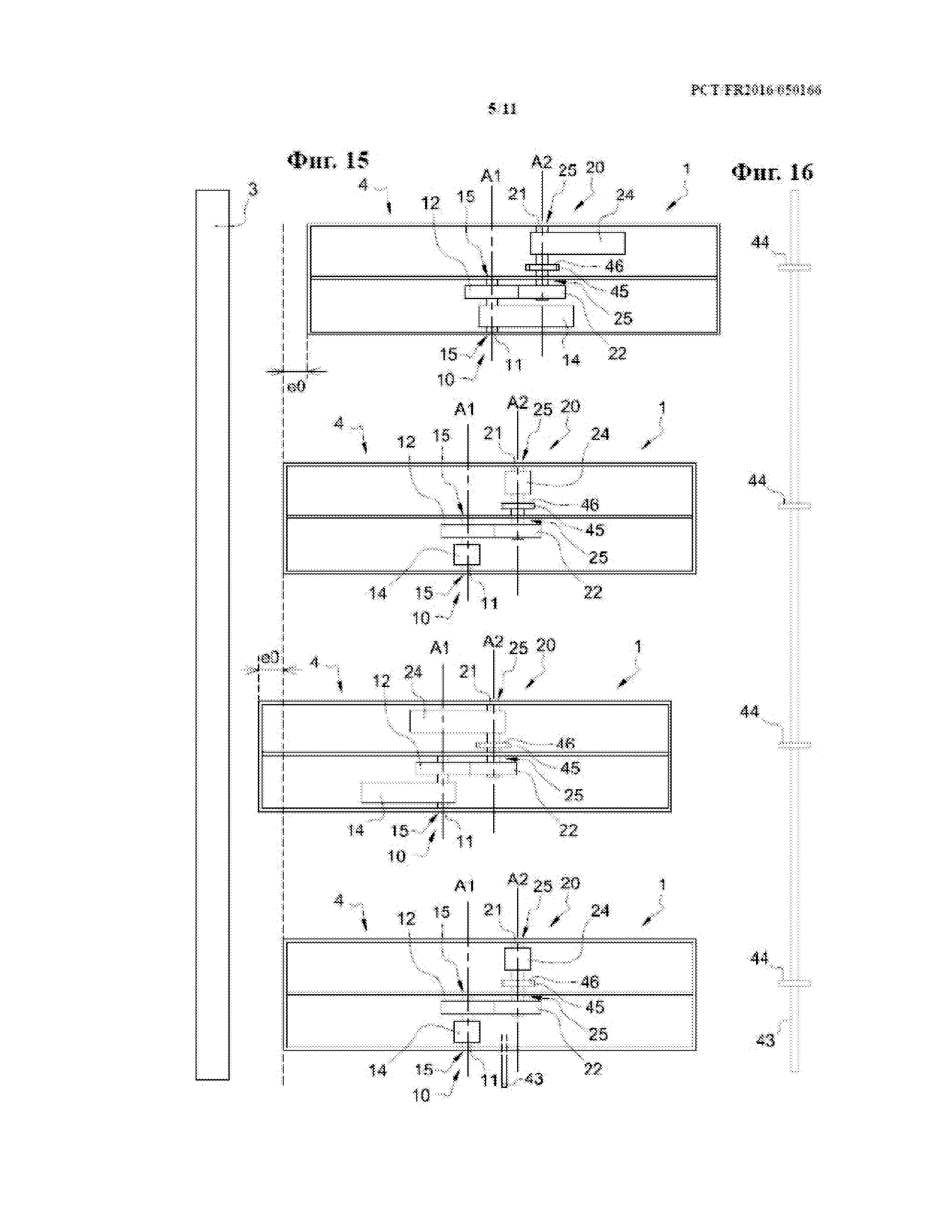
- фиг. 15 представляет собой вид, подобный фиг. 2, на котором изображен пример машины согласно изобретению, оснащенной четырьмя маятниковыми механизмами, которые расположены параллельно;
- фиг. 16 представляет собой вид, дополняющий фиг. 15, демонстрирующий вал, который является общим для различных механизмов;
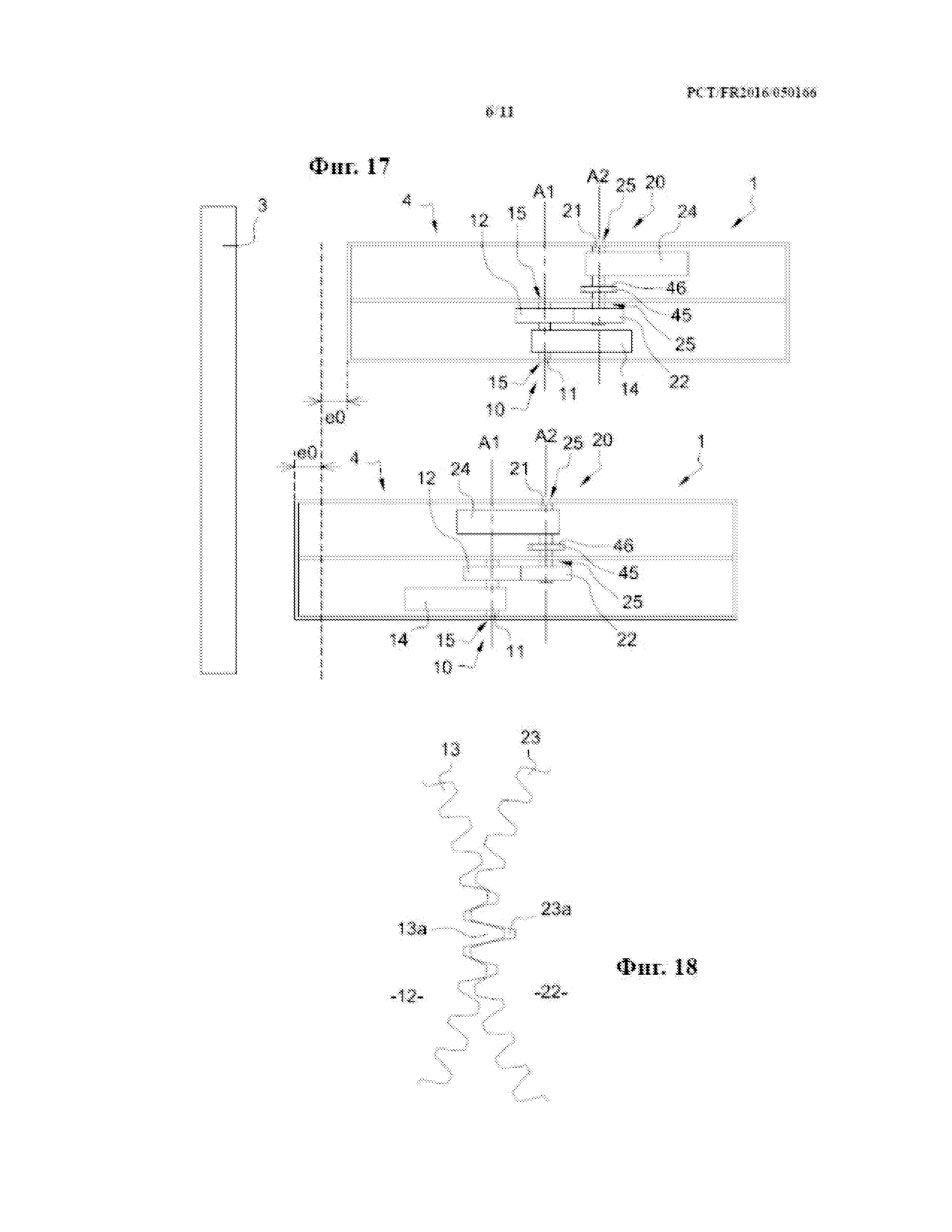
- фиг. 17 представляет собой вид, подобный фиг. 15, на котором изображен другой пример машины согласно изобретению, оснащенной двумя маятниковыми механизмами, которые расположены параллельно; и
- фиг. 18 представляет собой частичный подробный вид зацепления между двумя зубчатыми колесами механизма, в конкретном варианте осуществления изобретения;
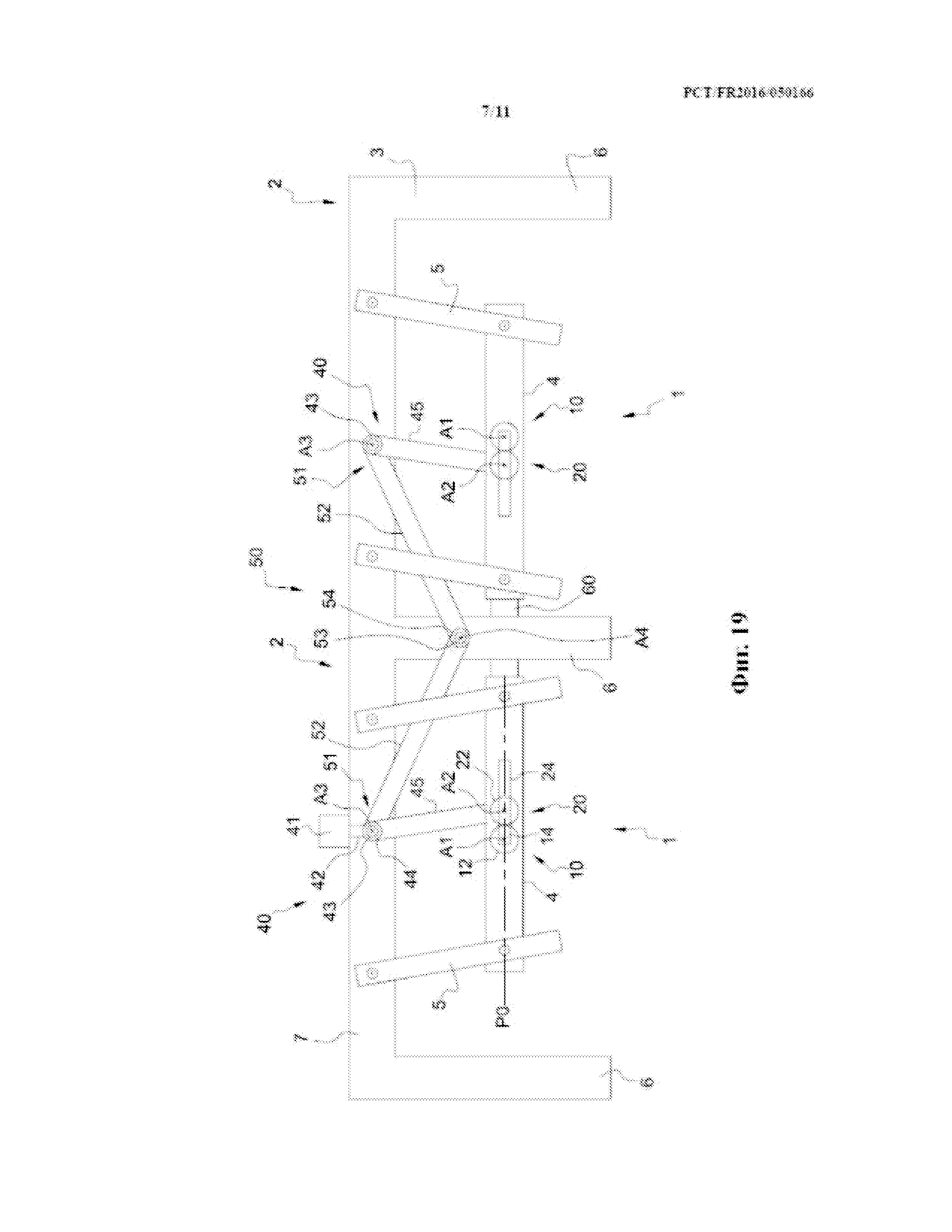
- фиг. 19 представляет собой вид, подобный фиг. 1, на котором изображен другой пример машины согласно изобретению, оснащенной двумя маятниковыми механизмами, которые расположены последовательно;
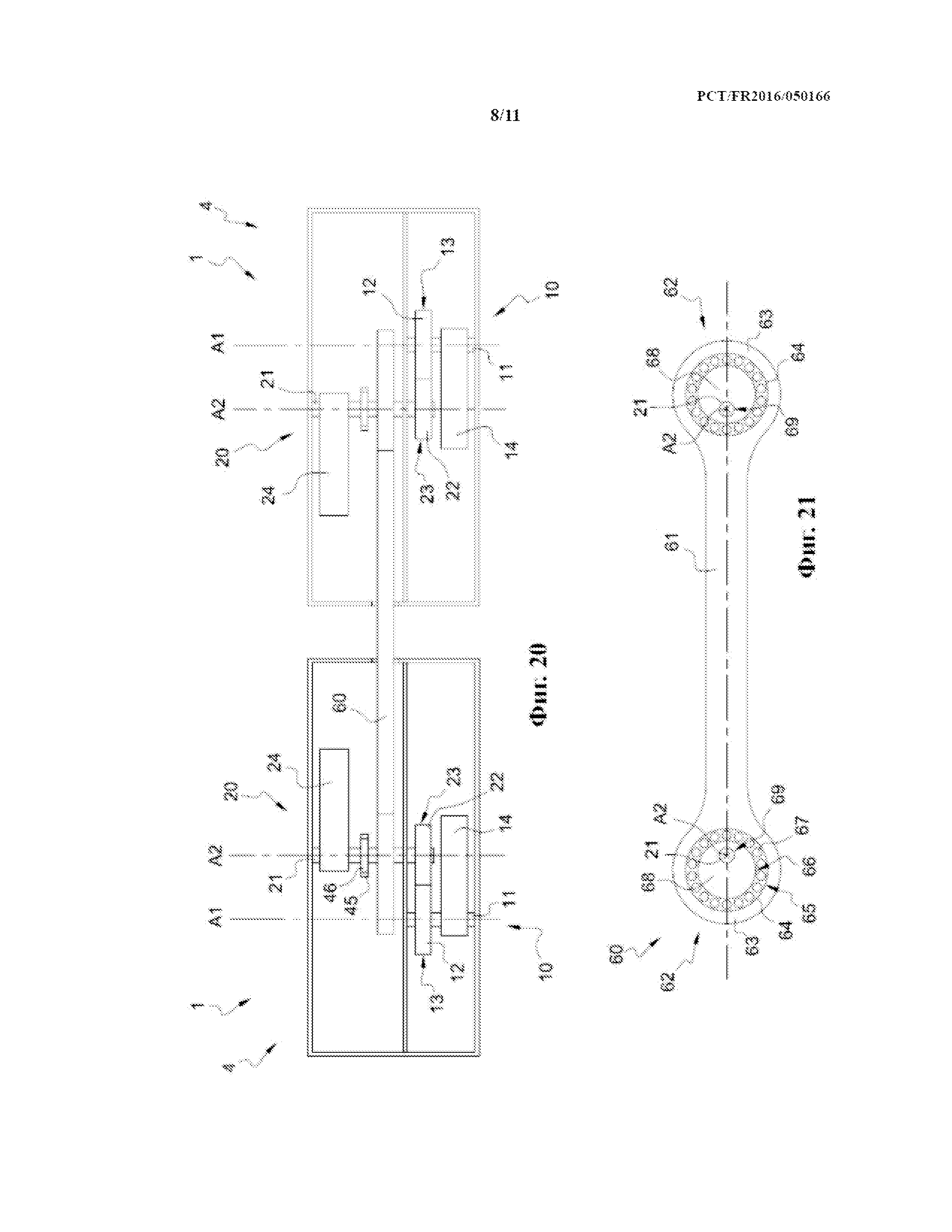
- фиг. 20 изображен вид, подобный фиг. 2, на котором показана машина, изображенная на фиг. 19;
- фиг. 21 представляет собой вид сбоку соединительной тяги, которой оснащена машина на фиг. 19 и 20;
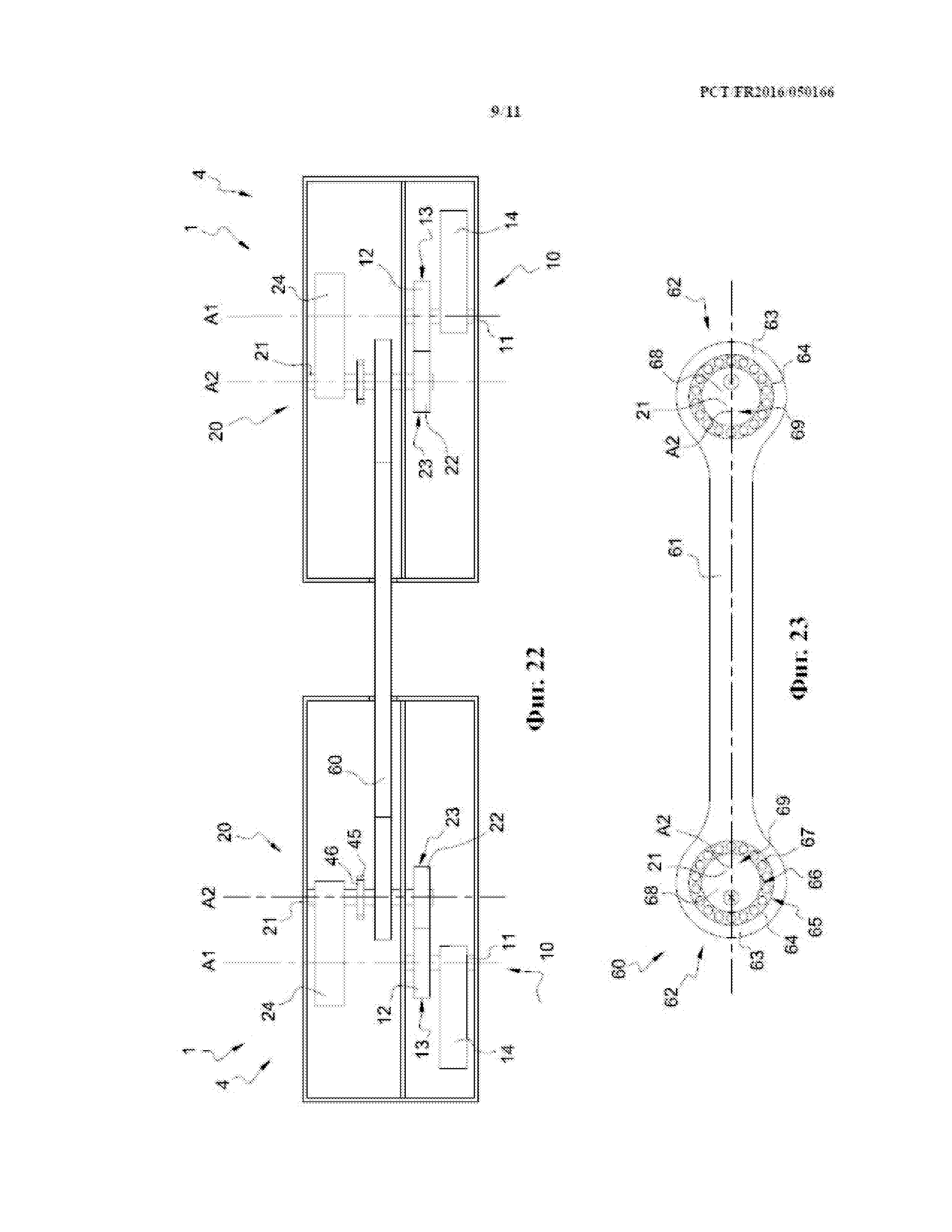
- фиг. 22 и 23 представляют собой виды, подобные соответственно фиг. 20 и 21, в другой конфигурации машины;
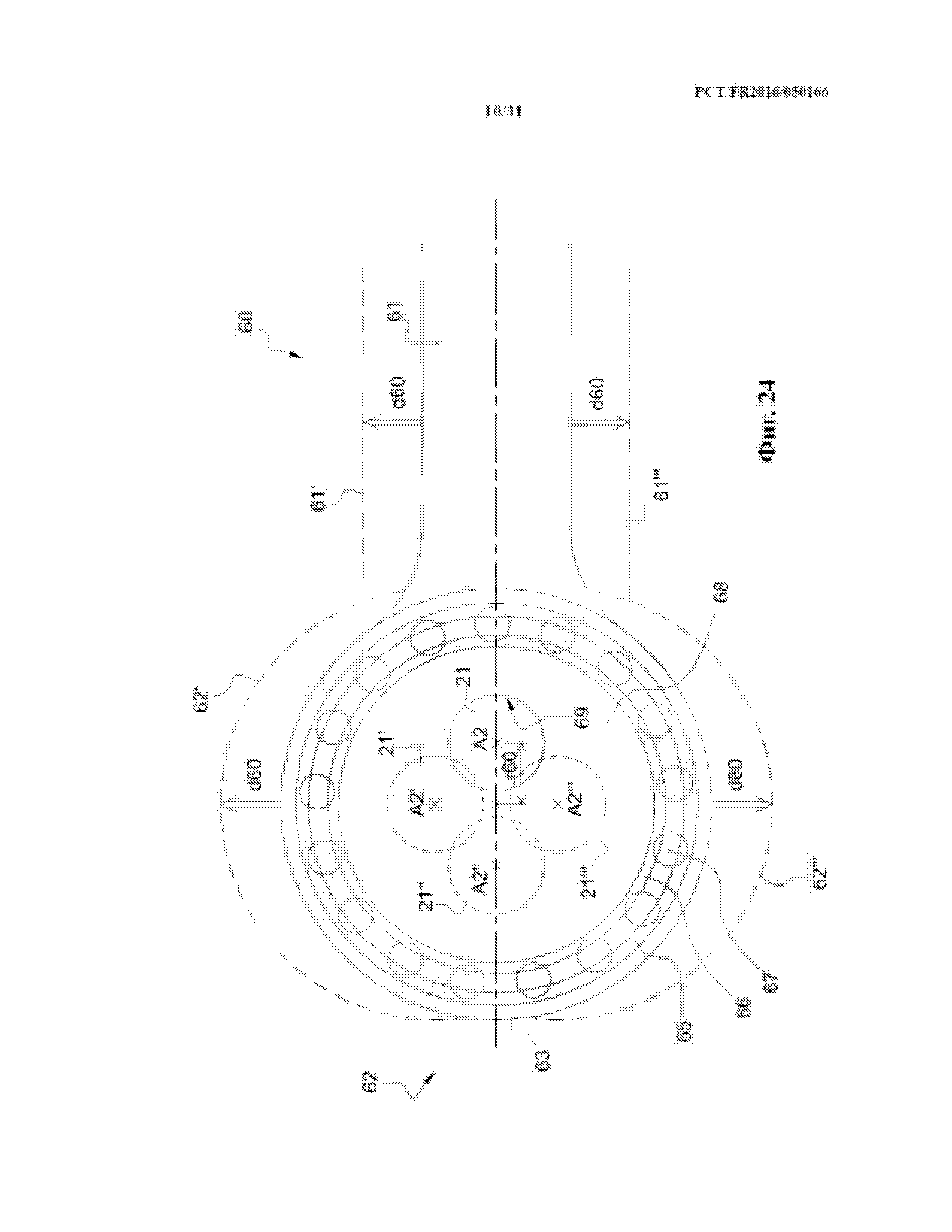
- фиг. 24 представляет собой вид в увеличенном масштабе одного конца соединительной тяги, изображенной на фиг. 21 и 23, показывающий разные положения во время работы машины;
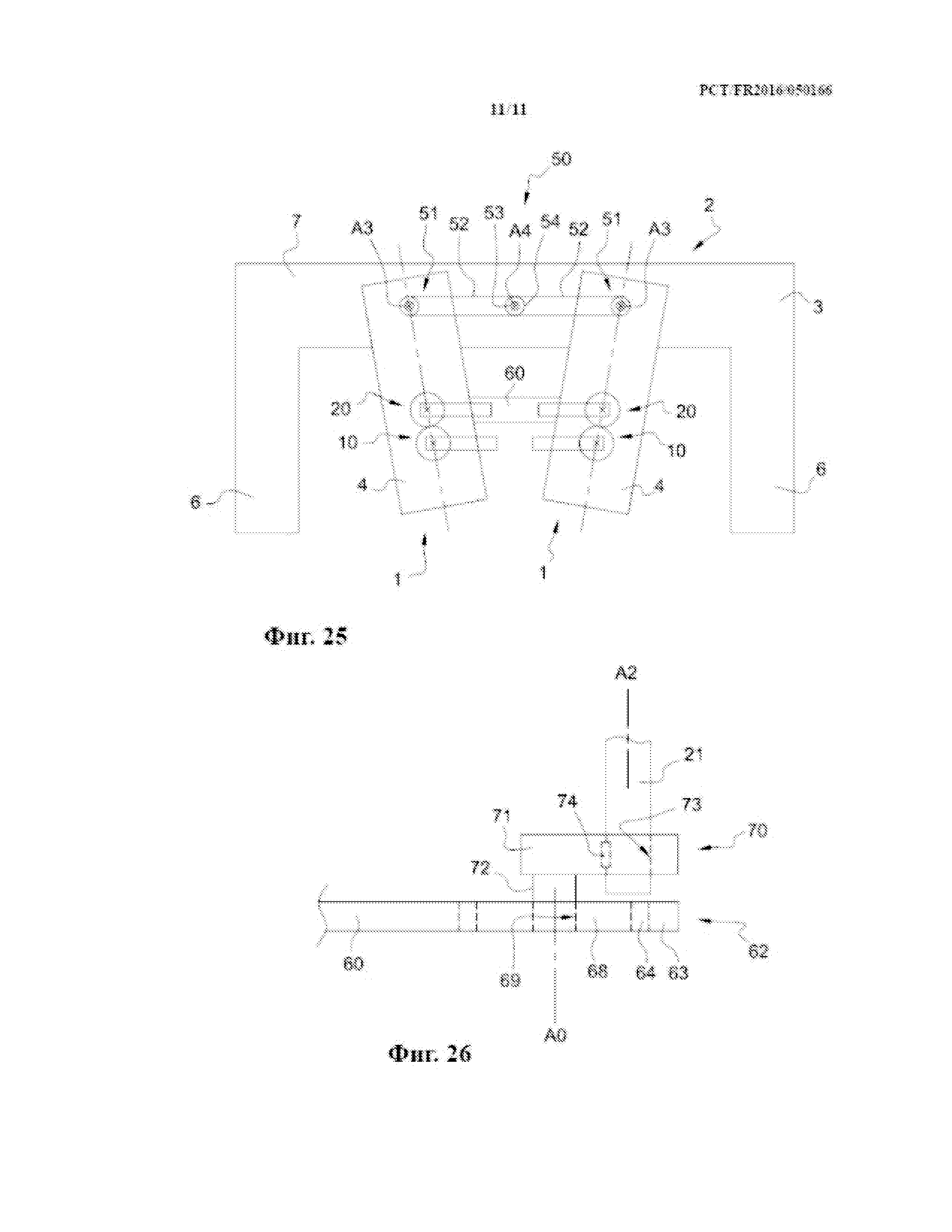
- фиг. 25 представляет собой вид, подобный фиг. 19, на котором изображен другой пример машины согласно изобретению, оснащенной двумя маятниковыми механизмами, которые расположены последовательно; и
- фиг. 26 представляет собой вид сверху, на котором показан один вариант соединения между соединительной тягой и механизмом.
На фиг. 1–10 показан энергосберегающий уравновешенный механизм 1 согласно первому варианту осуществления настоящего изобретения.
Механизм 1 содержит опору 2, первый блок 10, выполненный с возможностью вращения R1 вокруг первой оси A1, второй блок 20, выполненный с возможностью вращения R2 вокруг второй оси A2, и средства 40 запуска механизма 1. Оси A1 и A2 горизонтально параллельны друг другу и расположены в базовой плоскости P0, которая является горизонтальной. Блоки 10 и 20 вращаются в противоположных направлениях.
Опора 2 содержит неподвижное основание 3 и подвижный маятник 4, который расположен горизонтально и подвешен на основании 3 с помощью четырех соединительных стержней 5 по углам. Каждый соединительный стержень 5 шарнирно прикреплен как к основанию 3, так и к маятнику 4 посредством шарнирных соединительных элементов, параллельных осям A1 и A2. Маятник 4 выполнен с возможностью поступательного движения в круговом направлении относительно основания 3.
Опора 2 содержит две вертикальные опоры 6 и верхний горизонтальный брус 7. Соединительные стержни 5 шарнирно закреплены на брусе 7.
Маятник 4 содержит три продольные пластины 8 и поперечины 9, прикрепленные к концам продольных пластин 8. Соединительные стержни 5 шарнирно закреплены на наружных пластинах 8. Пластины 8 маятника 4 обеспечивают опору для блоков 10 и 20. Конкретнее, блок 10 опирается на промежуточную пластину 8 и переднюю пластину 8 посредством подшипников 15, при этом блок 20 опирается на промежуточную пластину 8 и заднюю пластину 8 посредством подшипников 25. Оси A1 и A2 являются неподвижными относительно маятника 4.
Блок 10 содержит вал 11, зубчатое колесо 12, оснащенное зубьями 13, плечо 14 и подшипники 15. Вал 11, колесо 12 и подшипники 15 отцентрованы относительно оси A1, при этом плечо 14 представляет собой эксцентриковый элемент, имеющий центр тяжести G1, который смещен на расстояние d1 относительно оси A1. Колесо 12 и плечо 14 установлены на валу 11, который опирается на подшипники 15, установленные внутри пластин 8 маятника 4. Колесо 12 выполнено с возможностью вращения R1 относительно маятника 4 вокруг оси A1.
Плечо 14 выполнено с возможностью вращения R1 совместно колесом 12 и создает момент M1 силы тяжести P1 вокруг оси A1. Сила P1 является сравнительно постоянной. Однако, момент M1 имеет величину и направление (по часовой стрелке или против часовой стрелки), которые изменяются в зависимости от углового положения плеча 14 вокруг оси A1.
Блок 20 содержит вал 21, зубчатое колесо 22, оснащенное зубьями 23, плечо 24 и подшипники 25. Вал 21, колесо 22 и подшипники 25 отцентрованы относительно оси A2, при этом плечо 24 представляет собой эксцентриковый элемент, имеющий центр тяжести G2, который смещен на расстояние d2 относительно оси A2. Колесо 22 и плечо 24 установлены на валу 21, который опирается на подшипники 25, установленные внутри пластин 8 маятника 4. Колесо 22 выполнено с возможностью вращения в направлении R2 относительно маятника 4 вокруг оси A2.
Плечо 24 выполнено с возможностью вращения в направлении R2 совместно c колесом 14 и создает момент M2 силы тяжести P2 вокруг оси A2. Сила P2 является по существу постоянной. Однако, момент M2 имеет величину и направление (по часовой стрелке или против часовой стрелки), которые изменяются в зависимости от углового положения плеча 24 вокруг оси A2.
Колеса 12 и 22 находятся в зацеплении друг с другом с постоянным передаточным отношением. Колеса 12 и 22 имеют одинаковые размеры и одинаковое количество зубьев 13 и 23. Колеса 12 и 22 выполнены с возможностью вращения в противоположных направлениях R1 и R2. Иначе говоря, колеса 12 и 22 вращаются в противоположных направлениях.
В контексте настоящего изобретения плечи 14 и 24 расположены точно одно относительно другого и относительно колес 12 и 14, чтобы моменты M1 и M2 всегда имели одинаковую величину и одинаковое направление (по часовой стрелке или против часовой стрелки), независимо от соответствующих угловых положений плеч 14 и 24 вокруг осей A1 и A2.
Масса и размеры плеч 14 и 24 точно определены, поскольку они влияют на положение центров тяжести G1 и G2 и, таким образом, на величину моментов M1 и M2. Масса каждого плеча 14 и 24 пропорциональна его размерам, при постоянной объемной массе. Предпочтительно, плечи 14 и 24 имеют одинаковую массу и одинаковые размеры. Альтернативно, плечи 14 и 24 могут иметь различные массы и размеры, при условии, что моменты M1 и M2 имеют одинаковую величину и одинаковое направление (по часовой стрелке или против часовой стрелки) независимо от их соответствующих угловых положений.
Устройство 40 запуска механизма 1 предназначено для введения во вращение R1 и R2 блоков 10 и 20 из состояния равновесия механизма 1. Устройство 40 может характеризоваться любой конфигурацией, подходящей к рассматриваемой области применения.
В примере, показанном на фиг. 1 и 2, устройство 40 содержит двигатель 41, ремень 42, передаточный вал 43, зубчатое колесо 44, зубчатую цепь 45 и зубчатое колесо 46. Двигатель 41 размещен на брусе 7 основания 3. Вал 43 опирается своими концами на основание 3 и выполнен с возможностью вращения вокруг оси A3, которая находится на одной линии в вертикальном направлении с верхними шарнирами соединительных стержней 5. Ось A3 расположена горизонтально, параллельно осям A1 и A2. Ремень 42 соединяет двигатель 41 с валом 43. Колесо 44 установлено с возможностью вращения совместно с валом 43, при этом колесо 46 установлено с возможностью вращения совместно с валом 21. Альтернативно, колесо 46 может быть установлено с возможностью вращения совместно с валом 11. Цепь 45 соединяет колеса 44 и 46, межцентровое расстояние которых равно межцентровому расстоянию соединительных стержней 5. Согласно другому альтернативному варианту зубчатые колеса 44 и 46, а также цепь 45 могут быть заменены системой универсальных соединений или любой другой системой передачи движения, подходящей к рассматриваемой области применения. Таким образом, запуск двигателя 41 позволяет привести блоки 10 и 20 во вращение R1 и R2.
На практике движение механизма 1 позволяет собирать энергию в области вала 43, например путем соединения указанного вала 43 с генератором. Вал 43 таким образом представляет собой вал для сбора энергии.
Альтернативно, для запуска механизма 1, вал 43 может быть непосредственно приведен в движение кривошипом.
Согласно другому варианту механизм 1 может не содержать устройство из двигателя 41 и ремня 42, представляющее собой средства запуска. В этом случае запуск механизма 1 может быть реализован путем простого приложения давления к одной стороне маятника 4 или одному из плеч 14 и 24. Энергия, необходимая для запуска механизма 1, является довольно незначительной. Предпочтительно, механизм 1 содержит все те же самые элементы 43, 44, 45 и 46. Вал 43 может быть соединен с генератором для сбора энергии.
Для обеспечения правильной работы механизма 1 расстояние между дальним концом каждого плеча 14 и 24 и его осью вращения A1 или A2 меньше, чем межцентровое расстояние между шарнирами соединительных стержней 5, вследствие чего плечи 14 и 24 могут проходить под передаточным валом 43.
На фиг. 3–10 показана работа механизма 1 в течение одного оборота. В частности, на фиг. 3–6 изображена половина оборота, во время которой плечи 14 и 24 перемещаются к правой стороне маятника 4, при этом на фиг. 7–10 изображена половина оборота, во время которой плечи 14 и 24 перемещаются к левой стороне маятника 4.
На фиг. 3 изображены расположенное вверху плечо 14 и расположенное внизу плечо 24. Механизм 1 находится в состоянии равновесия. Колеса 12 и 22 неподвижны. Моменты M1 и M2 не существуют.
На этом этапе устройство 40 обеспечивает приведение в движение механизма 1, а также вхождение в зацепление колес 12 и 22, чтобы сместить оба плеча 14 и 24 вправо. Касание со стороны плеча 14 способствует повороту колеса 12 во вращение в направлении R1, что позволяет привести колесо 22 во вращение в направлении R2, и, таким образом, поднять плечо 24.
На фиг. 4 изображены плечи 14 и 24, каждое из которых совершило одну восьмую оборота вправо. На фиг. 5 изображены плечи 14 и 24, каждое из которых совершило четверть оборота вправо. На фиг. 6 изображены плечи 14 и 24, каждое из которых совершило четверть оборота вправо. В каждый момент времени, моменты M1 и M2 имеют одинаковую величину и одинаковое направление (по часовой стрелке). Под действием плеч 14 и 24 маятник 4 приходит в движение вверх с правой стороны.
На фиг. 7 изображены плечи 14 и 24, каждое из которых совершило половину оборота относительно их начальных положений на фиг. 3. Плечо 14 расположено внизу, при этом плечо 24 расположено вверху. Моменты M1 и M2 не существуют. Колеса 12 и 22 перемещаются, чтобы сместить оба плеча 14 и 24 вправо. Касание со стороны плеча 24 способствует повороту колеса 22 в направлении вращения R2, что способствует повороту колеса 22 в направлении вращения R1 и, таким образом, подъему плеча 14.
На фиг. 8 изображены плечи 14 и 24, каждое из которых совершило одну восьмую оборота влево. На фиг. 9 изображены плечи 14 и 24, каждое из которых совершило четверть оборота влево. На фиг. 10 изображены плечи 14 и 24, каждое из которых совершило три четверти оборота влево. В каждый момент времени, моменты M1 и M2 имеют одинаковую величину и одинаковое направление (против часовой стрелки). Под действием плеч 14 и 24 маятник 4 приходит в движение влево.
По мере поворота блоков 10 и 20 вокруг осей A1 и A2, плечи 14 и 24, таким образом, располагаются иногда справа, иногда слева. На практике вращение R1 и R2 плеч 14 и 24 создает центробежные силы в механизме 1. Маятник 4 смещается иногда вправо, иногда влево. В результате этого, плечи 14 и 24 совершают эллиптическое движение вместо движения по окружности.
Механизм 1 совершает двухфазное колебательное движение. Центробежные силы являются максимальными, когда плечи 14 и 24 проходят мимо друг друга, как на фиг. 5 и 9. Каждая фаза соответствует половине оборота (180°) плеч 14 и 24, между их положениями с максимальной центробежной силой.
С учетом вышеописанных объяснений, следует отметить, что для каждого углового положения зубчатых колес 12 и 22 и плеч 14 и 24 относительно осей A1 и A2 механизм 1 находится в равновесии в состоянии покоя. Другими словами, если рассматривать механизм 1 без движения, независимо от углового положения блоков 10 и 20, затем механизм 1 приходит в состояние покоя. Механизм 1 сбалансирован, что значительно снижает количество энергии, необходимой для обеспечения поворота блоков 10 и 20.
На фиг. 11–14 показана работа механизма 1 согласно второму варианту осуществления. Оси A1 и A2 параллельны друг другу и являются горизонтальными. Однако, оси A1 и A2 расположены в базовой плоскости P0, которая является вертикальной.
Также согласно этому варианту осуществления плечи 14 и 24 расположены точно одно относительно другого и относительно колес 12 и 14, чтобы моменты M1 и M2 всегда имели одинаковую величину и одинаковое направление (по часовой стрелке или против часовой стрелки), независимо от соответствующих угловых положений плеч 14 и 24 вокруг осей A1 и A2.
На фиг. 11–14 изображено только положение плеч 14 и 24 на правой стороне, при этом положение плеч 14 и 24 на левой стороне не изображено в целях упрощения.
На практике, один механизм 1 не может представлять собой двигатель, учитывая потери энергии. Несмотря на это, можно изготовить двигатель путем объединения нескольких синхронизированных механизмов 1, как объясняется далее.
На фиг. 15 и 16 изображен пример вращающейся машины согласно изобретению, которая относится к типу четырехтактного двигателя. Двигатель содержит четыре механизма 1, каждый из которых оснащен своим собственным маятником 4. Механизмы 1 и их маятники 4 размещены параллельно друг другу, т. е. бок о бок.
Основание 3 является общим для всех механизмов 1. Другими словами, основание 3 поддерживает каждый из маятников 4, подвешенных параллельно друг другу. Основание 3 показано только частично с целью упрощения.
Передаточный вал 43 также является общим для всех механизмов 1. Движение механизмов 1, таким образом, позволяет собирать энергию в области вала 43, например путем соединения указанного вала 43 с генератором 58. Вал 43 в данном случае представляет собой вал для сбора энергии. Вал 43 только частично изображен в нижней части фиг. 15 в целях упрощения, и изображен полностью со своими четырьмя зубчатыми колесами 45 на фиг. 16.
На практике четыре плеча 14 смещены на четверть оборота друг относительно друга. Подобным образом, четыре плеча 24 смещены на четверть оборота друг относительно друга. Таким образом, двигатель всегда имеет одинаковое количество плеч 14 или 24 на левой стороне или правой стороне, тем самым повышая свой коэффициент полезного действия. Каждая фаза соответствует четверти оборота (90°) механизмов 1.
Когда оба из двух механизмов 1 находятся в мертвой точке (моменты M1 и M2 не существуют), два других механизма 1 находятся в положениях с максимальной центробежной силой, соответственно на левой стороне и на правой стороне, с отклонением e0 с каждой стороны. Сгенерированная энергия является максимальной в указанных положениях с максимальной центробежной силой, или положениях с толкательным усилием. Так как четыре механизма 1 никогда не пребывают в мертвой точке одновременно, двигатель не имеет мертвой точки. Преимущественно, каждое положение с максимальной центробежной силой соответствует сгоранию газа внутри двигателя.
На фиг. 17 изображен другой пример вращающейся машины в соответствии с изобретением, которая относится к типу двухтактного двигателя, согласно варианту, изображенному на фиг. 15. В этом случае двигатель содержит два механизма 1, каждый из которых снабжен своим собственным маятником 4.
Как изображено на фиг. 15, основание 3 является общим для обоих механизмов 1, и поддерживает каждый из маятников 4, размещенных параллельно друг другу. Передаточный вал 43 также является общим для обоих механизмов 1, вследствие чего движение обоих механизмов позволяет регенерировать энергию на валу. В целях упрощения основание 3 и вал 43 только частично изображены на фиг. 17.
В этом варианте осуществления два плеча 14 смещены на половину оборота друг относительно друга. Подобным образом, два плеча 24 смещены на половину оборота друг относительно друга. Как упомянуто выше, двигатель всегда имеет одинаковое количество плеч 14 или 24 на левой стороне или правой стороне, тем самым повышая свой коэффициент полезного действия. Каждая фаза соответствует половине оборота (180°) механизмов 1.
Во время вращения на 360°, два механизма 1 одновременно находятся в мертвых точках (моменты M1 и M2 не существуют) и одновременно в положениях с толкательным усилием, каждое из которых соответствует сгоранию газа в двигателе.
Согласно другому непредставленному варианту вращающаяся машина содержит восемь механизмов 1 с маятниками 4, расположенными параллельно. Во время поворота машина создает толкающее усилие каждую восьмую часть оборота (45°) механизма 1.
Другие варианты могут быть реализованы без отхода от объема изобретения. Размеры составных элементов машины, например основания 3 и передаточного вала 43, изменяются в соответствии с количеством механизмов 1.
Для получения наилучших результатов и коэффициентов полезного действия, важно, чтобы каждый маятник 4 был расположен в строго горизонтальной плоскости. То же применимо к осям A1 и A2 зубчатых колес 12 и 22, которые должны быть расположены в строго горизонтальной или вертикальной плоскости P0, в зависимости от конфигурации механизма 1.
На фиг. 18 представлен частный и предпочтительный вариант осуществления изобретения, в котором колесо 12 имеет один зуб 13a, который длиннее, чем другие зубья 13, тогда как колесо 22 имеет впадину 23a, образованную между двумя зубьями 23. Зуб 13a и впадина 23a могут иметь различные формы без отхода от объема настоящего изобретения.
На практике зуб 13a и впадина 23a совпадают в момент зацепления зубчатых колес 12 и 22, что обеспечивает выравнивание эксцентриковых элементов 14 и 24 и, таким образом, точную балансировку механизма 1.
Например, зубчатые колеса 12 и 22 и эксцентриковые элементы 14 и 24 могут содержать фиксирующие отверстия, расположенные напротив друг друга, которые не показаны на различных фигурах в целях упрощения. Таким образом, зуб 13a и впадина 23a способствуют выравниванию указанных фиксирующих отверстий.
На фиг. 19–24 изображен другой пример вращающейся машины в соответствии с изобретением, которая относится к типу двухтактного двигателя, согласно варианту, изображенному на фиг. 17. Двигатель содержит два механизма 1 согласно настоящему изобретению, каждый из которых оснащен своим собственным маятником 4. Механизмы 1 и их маятники 4 размещены последовательно, т. е. выровнены в продолжении друг друга.
Основание 3 является общим для обоих механизмов 1. Другими словами, основание 3 поддерживает каждый из маятников 4, подвешенных последовательно.
Каждый механизм 1 содержит свой собственный передаточный вал 43, имеющий ось A3, которая находится на одной линии с верхними шарнирами соединительных стержней 5. Однако, только один двигатель 41 необходим для запуска механизмов 1. Альтернативно, двигатель 41 может быть заменен кривошипом, или машина может не содержать средств для запуска механизмов 1.
Машина содержит промежуточное устройство 50, расположенное между устройствами 40 двух механизмов 1. Указанное устройство 50 может быть использовано для передачи движения между двумя устройствами 40, а также для сбора энергии. В примере на фиг. 19 устройство 50 содержит два зубчатых колеса 51, две зубчатых цепи 52, один вал 53 и два зубчатых колеса 54. Вал 53 выполнен с возможностью вращения вокруг оси A4, которая расположена горизонтально, параллельно осям A1, A2 и A3. Вал 53 опирается своими концами на основание 3, например, на две опоры 6 основания 3. Альтернативно, вал 53 может опираться на брус 7, вследствие чего его ось A4 находится на одной линии с осью A3 механизмов 1. Колеса 51 установлены с возможностью вращения совместно с валами 43 двух механизмов 1, при этом колеса 54 установлены с возможностью вращения совместно с валом 53. Цепи 52 соединяют колеса 51 и колесо 54. Таким образом, движение разных механизмов 1 делает возможным регенерацию энергии на валу 53, например путем соединения этого вала 53 с генератором. Вал 53 в этом случае представляет собой вал для регенерации энергии.
Машина также содержит соединительную тягу 60, соединенную с двумя механизмами 1, таким образом, обеспечивая их синхронизацию и значительное снижение вибраций. Соединительная тяга 60 содержит центральную основную часть 61, соединяющую две головки 62, расположенные на ее продольных концах. Каждая головка 61 содержит кольцеобразную часть 63, в которой установлен шариковый подшипник 64. Альтернативно, эта кольцеобразная часть 63 может содержать любой тип подшипника, подходящий для целевого применения. Каждый шариковый подшипник 64 содержит наружное кольцо 65, внутреннее кольцо 66 и ряд шариков 67. Во внутреннем кольце 66 размещена втулка 68, содержащая эксцентриковое отверстие 69 для размещения вала 21 механизма 1. Втулка 68 выполнена как одно целое с валом 21 и выполнена с возможностью вращения внутри шарикового подшипника 64. Таким образом, вал 21 каждого механизма 1 выполнен с возможностью вращения в одной из головок 61 соединительной тяги 60.
На фиг. 20 и 21 механизмы 1 приближены друг к другу. Элементы 14 и 24 направлены к центру машины. Валы 21, соединенные с соединительной тягой 60, приближены друг к другу.
На фиг. 22 и 23 механизмы 1 отдалены. Элементы 14 и 24 направлены к сторонам машины. Валы 21, соединенные с соединительной тягой 60, отдалены.
Во время движения механизмов 1 и, в частности, их блоков 10 и 20, соединительный стержень 60 является неподвижным в горизонтальном направлении и подвижным в вертикальном направлении. Несмотря на то, что соединительная тяга 60 теоретически может свободно двигаться в пространстве, это не показано в динамике за счет горизонтального движения вследствие ее расположения в состоянии равновесия между двумя механизмами 1. Соединительная тяга 60 изготовлена из материала(ов), имеющего(их) хороший компромисс между сопротивлением и гибкостью, вследствие сильных напряжений, которые испытывает соединительная тяга 60.
На фиг. 24 частично показана соединительная тяга 60 в разных положениях во время работы машины. В частности, на фиг. 24 показана левая головка 62 соединительной тяги 60, соединенная с левым механизмом 1, изображенным на фиг. 19–23. Элементы 21, A2, 61 и 62, показанные в правом положении, обозначены как 21', A2', 61' и 62' в верхнем положении, 21'', A2'', 61 и 62 в левом положении, и 21''', A2''', 61''' и 62''' в нижнем положении. Заданы центральная ось A0 головки 62, шариковый подшипник 64 и втулка 68. Эта ось A0 представляет собой ось вращения для оси A2 во время движения механизма 1. Также между осями A0 и A2 задан постоянный радиус r60. Наконец, задано вертикальное отклонение d60 соединительной тяги 60 вверх и вниз. Отклонение d60 равно радиусу r60. Как неограничивающие примеры, диаметр вала 21 равен 30 миллиметрам, наружный диаметр наружного кольца 65 равен 140 миллиметрам, внутренний диаметр внутреннего кольца 66 равен 110 миллиметрам, и радиус r60 равен 20 миллиметрам. Таким образом, вертикальное отклонение d60 соединительной тяги 60 равно 20 миллиметрам вверх и 20 миллиметрам вниз.
Два плеча 14 расположены со смещением на пол-оборота по отношению друг к другу. Подобным образом, два плеча 24 расположены со смещением на пол-оборота по отношению друг к другу. Двигатель обычно имеет одинаковое количество плеч 14 или 24 на левой или правой стороне. Каждая фаза соответствует повороту на половину оборота (180°) механизмов 1.
Во время вращения на 360°, два механизма 1 одновременно находятся в мертвых точках (моменты M1 и M2 не существуют) и одновременно в положениях с толкательным усилием, каждое из которых соответствует сгоранию газа в двигателе.
На фиг. 25 изображен другой пример вращающейся машины в соответствии с изобретением, которая относится к типу двухтактного двигателя, согласно варианту, изображенному на фиг. 19. Двигатель содержит два механизма 1 согласно настоящему изобретению, каждый из которых оснащен своим собственным маятником 4. Маятники 4 подвешены непосредственно на основании 3 и расположены в ряд. Во время движения механизмов 1 и, в частности, их блоков 10 и 20, соединительная тяга 60 является неподвижной в горизонтальном направлении и подвижной в вертикальном направлении.
На фиг. 26 изображен другой способ соединения соединительной тяги 60 с механизмом 1. Отверстие 69 выполнено в центре втулки 68 и отцентровано относительно оси A0. Эксцентриковая часть 70 помещена между валом 21 и соединительной тягой 60. Часть 70 содержит продолговатую основную часть 71 и цилиндрический палец 72 кривошипа, выполненный как одно целое с основной частью 71. В основной части 71 выполнено отверстие 73. Вал 21 расположен в отверстии 73 и прикреплен к основной части 71, например посредством шпонки 74 или посредством любых других средств. Вал 21 и отверстие 73 отцентрованы относительно оси A2. Палец 72 кривошипа расположен в отверстии 69 втулки 68 и отцентрован относительно оси A0. Эта ось A0 представляет собой ось вращения для оси A2 во время движения механизма 1.
Согласно другому не показанному варианту вращающаяся машина содержит четыре маятниковых механизма 1, расположенных как параллельно, так и последовательно. Две пары механизмов 1 расположены параллельно и синхронизированы друг с другом. В каждой паре два механизма расположены последовательно и синхронизированы друг с другом. Во время одного оборота машина создает толкающее усилие каждую четвертую часть оборота (90°) механизмов 1.
Согласно другому непредставленному варианту вращающаяся машина содержит восемь механизмов 1 с маятниками 4, расположенными параллельно и последовательно. Во время поворота машина создает толкающее усилие каждую восьмую часть оборота (45°) механизма 1.
На фиг. 1–26 определенные движения и расстояния преувеличены в целях упрощения, как например боковое отклонение маятников 4.
На практике механизм 1 и машина могут быть согласованы не так, как показано на фиг. 1–26, без отхода от объема настоящего изобретения.
Например, система передачи посредством цепей и зубчатых колес может быть заменена системой универсальных соединений или любой другой системой передачи движений, подходящей к рассматриваемой области применения.
Кроме того, технические характеристики различных вариантов осуществления и варианты, указанные выше, могут, целиком или в определенной степени, быть скомбинированы вместе. Следовательно, механизм 1 и машина могут быть приведены в соответствие в отношении стоимости, функциональных возможностей и эксплуатационных характеристик.
Реферат
Настоящее изобретение относится к энергосберегающему уравновешенному механизму, предназначенному для передачи вращательного движения, полученного от средств запуска. Например, если вращательное движение передается на первое зубчатое колесо (12) через двигатель, то второе зубчатое колесо (22) будет вращаться в противоположном направлении, а эксцентриковые элементы (14, 24) будут вращаться в противоположных направлениях относительно друг друга. Заявленный механизм сбалансирован, что значительно снижает количество энергии, необходимой для обеспечения поворота блоков (10 и 20). Заявленное изобретение позволяет уменьшить энергию, необходимую для приведения зубчатых колес во вращение, посредством уравновешивания эксцентриковых элементов и центробежных сил, которые они создают. Предложены также вращающаяся машина и способ применения энергосберегающего механизма. Целью настоящего изобретения является предоставление механизма, позволяющего экономить энергию и повышать коэффициент полезного действия вращающейся машины. 3 н. и 19 з.п. ф-лы, 26 ил.
Комментарии