Способ определения местоположения подводного объекта - RU2709100C1
Код документа: RU2709100C1
Чертежи





Описание
Предлагаемое изобретение относится к области подводной навигации, а именно, к определению местоположения подводного объекта посредством гидроакустической навигационной системы и может быть использовано для определения навигационных характеристик (азимута, угла места, дальности, наклонного расстояния) подводного объекта, например, автономного или телеуправляемого аппарата, донной станции относительно другого объекта, например, обеспечивающего судна.
Известен способ навигации [1], где исследуемый полигон акватории координируют тремя акустическими маяками-ответчиками, с которыми подводный объект взаимодействует, получая запрос и передавая свой акустический сигнал, а маяки передают на судно обеспечения их расстояния до объекта. На судне вычисляют координаты объекта как точку пересечения трех сфер. Этот способ громоздок, требует больших затрат судового времени для развертывания и дорог в эксплуатации.
Наиболее близким к заявляемому способу по технической сути (прототипом) является способ [2] определения относительно судна обеспечения местоположения автономного подводного аппарата, снабженного акустическим излучателем, в качестве которого устанавливают маяк-пингер, излучающий стандартные периодические сигналы, начало которых предварительно синхронизуют с судовым генератором аналогичных опорных сигналов, при этом сигналы маяка-пингера принимают судовой антенной, усиливают и передают на вход измерителя временного смещения (смесителя), на второй вход которого подают опорные сигналы судового генератора, где сравнивают их с принятыми одноименными сигналами маяка-пингера и, таким образом, вычисляют их временное смещение ΔT относительно одноименных опорных сигналов, умножая которое на скорость звука в воде c, получают наклонное расстояние R по лучу от маяка-пингера до антенны судна (R=ΔТс), вместе с тем, используя судовую приемную антенну дипольного типа с минимумом диаграммы направленности и, вращая ее относительно вертикальной оси, фиксируют пеленг маяка-пингера подводного аппарата относительно судовых координат по минимуму амплитуды принимаемого сигнала, а также, используя судовой эхолот, определяют глубину акватории под судном h, затем из геометрического построения прямоугольного треугольника, где R - гипотенуза, h - катет, определяют проекцию наклонного расстояния на горизонтальную поверхность дна, что в совокупности с углом пеленга определяет ориентировочные относительно судна координаты подводного аппарата.
К недостатку данного способа следует отнести низкую точность определения местоположения подводного объекта, обусловленную следующими причинами:
а) использованием на судне приемной гидроакустической антенны дипольного типа с амплитудным методом пеленгации, имеющим большую методическую погрешность оценивания пеленга;
б) влиянием возможных неровностей дна акватории, поскольку ее глубина измеряется под судном обеспечения, а не в месте расположения подводного объекта, где глубина из-за возможных неровностей дна может быть иной, вследствие этого неверно определяется наклонное расстояние между подводным объектом и судном, и, соответственно, дальность от судна подводного объекта;
в) отличием частот задающих генераторов на подводном объекте и на судне, что приводит к ошибке определения на судне времени распространения акустического навигационного сигнала от подводного объекта до судна и, как следствие, к дополнительной ошибке в определении наклонного расстояния между подводным объектом и судном;
г) неточностью измерения скорости звука в акватории, которая также приводит к ошибке в определении наклонного расстояния между подводным объектом и судном.
Кроме того, известному способу присущ и другой недостаток, связанный с механическим вращением приемной гидроакустической антенны судна вокруг вертикальной оси, что увеличивает время, затрачиваемое на процедуру позиционирования.
Техническим результатом заявляемого способа является устранение отмеченных недостатков прототипа и расширение его функциональных возможностей за счет использования составного навигационно-информационного сигнала маяка-пингера, четырехэлементной судовой приемной антенны с пространственной геометрией размещения сферических гидрофонов и соответствующей последовательности операций по обработке сигналов с выходов элементов приемной антенны.
Данный технический результат достигается за счет того, что в известном способе определения относительно судна обеспечения местоположения подводного объекта, снабженного маяком-пингером, периодически излучающим сигналы, принимаемые судовой антенной, осуществляют измерение на подводном объекте глубины его погружения, формируют и передают на судно составной сигнал, состоящий из навигационной и информационной частей, при этом информационная часть сигнала содержит информацию об измеренной глубине погружения подводного объекта, применяют для приема сигнала от подводного объекта четырех элементную приемную антенну с пространственным размещением сферических гидрофонов, исключающим их расположение в одной плоскости, и максимальным расстоянием между гидрофонами не превышающим длину волны излучаемых маяком-пингером колебаний навигационной части составного сигнала, измеряют декартовы координаты гидрофонов приемной антенны, принимают один из гидрофонов антенны в качестве опорного, осуществляют прием составного навигационно-информационного сигнала, поступающего от подводного объекта, определяют разности фаз колебаний навигационной части составного навигационно-информационного сигнала на выходах опорного и трех других гидрофонов, выделяют из информационной части составного навигационно-информационного сигнала информацию о глубине погружения подводного объекта, вычисляют азимут, угол места, дальность и наклонное расстояние до подводного объекта с использованием соотношений, связывающих декартовы координаты гидрофонов приемной антенны, измеренные разности фаз колебаний навигационной части составного сигнала маяка-пингера на выходах опорного и трех других гидрофонов приемной антенны, частоту колебаний навигационной части составного сигнала маяка-пингера и глубину погружения подводного объекта.
Существенным отличием заявляемого способа является изменение структуры сигнала маяка-пингера с возможностью передачи на судно обеспечения информации о глубине погружения подводного объекта, увеличивающей точность оценки дальности объекта, использование четырехэлементной приемной антенны с пространственным размещением сферических гидрофонов и соответствующей последовательности операций при обработке сигналов приемной антенны, обеспечивающих высокую точность вычисления угловых координат маяка-пингера, что в совокупности позволяет повысить точность определения местоположения подводного объекта.
Совокупность существенных признаков заявляемого способа имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым, обладает изобретательским уровнем, так как явным образом не следует из уровня техники, и пригодно для практического применения.
Предлагаемое изобретение поясняется чертежами.
На фиг. 1 изображены примеры пространственного размещения гидрофонов для «диаметрально-ортогональной» (фиг. 1а) и «пирамидальной» (фиг. 1б) геометрий судовой приемной антенны, где 1-4 - сферические приемные гидрофоны; 5 - элементы конструкции; L1, L2 - расстояния между парами гидрофонов в горизонтальной плоскости; N - смещение между парами гидрофонов в вертикальной плоскости; L, Н - сторона основания и высота пирамиды; φ - азимутальный угол; θ - угол места. Гидрофоны в представленном на фиг. 1a примере антенны с «диаметрально-ортогональной» геометрией размещаются попарно-симметрично в противоположных вершинах оснований прямоугольного параллелепипеда с пространственной перпендикулярностью линий, соединяющих пары гидрофонов на основаниях параллелепипеда, при этом высота параллелепипеда не равна стороне основания; на фиг. 1б, в примере антенны с «пирамидальной» геометрией, гидрофоны размещаются в вершинах треугольной пирамиды, где длина боковых ребер пирамиды не равна стороне равностороннего треугольника, являющегося ее основанием.
Пространством наблюдения для представленных геометрий приемной антенны считается область нижнего полупространства, ограниченная координатными полуосями: X,-X,Y,-Y,-Z.
В общем случае, расположение четырех гидрофонов приемной антенны в пространстве может быть произвольным, важно только, чтобы гидрофоны не располагались в одной плоскости и максимальное расстояние между ними не превышало длину волны излучаемых маяком-пингером колебаний навигационной части составного навигационно-информационного сигнала.
В частном случае, исходя из условия обеспечения одинакового характера изменения погрешностей вычисления угловых координат подводного объекта по всем направлениям выбранного пространства наблюдения, гидрофоны приемной антенны следует располагать в вершинах правильных многогранников: для антенн с «диаметрально-ортогональной» геометрией - в вершинах гексаэдра (куба), для антенн с «пирамидальной» геометрией - в вершинах правильного тетраэдра (треугольной пирамиды с равными гранями).
Для многих практических применений в различных конструктивно-технологических условиях размещения приемной антенны на надводных и подводных объектах можно рекомендовать две достаточно общие и эффективные (с точки зрения минимизации погрешностей вычисления угловых координат подводного объекта по пространству наблюдения при вариациях линейных размеров антенны) пространственные геометрии: для антенн с «диаметрально-ортогональной» геометрией - гидрофоны следует размещать в точках, соответствующих пространственному расположению вершин прямого параллелепипеда с ромбическими основаниями, по два на каждом из оснований параллелепипеда, в вершинах их противоположных углов, таким образом, чтобы плоскости, проведенные через эти вершины оснований и точку пересечения диагоналей параллелепипеда, были взаимно перпендикулярны, при этом высота параллелепипеда, проведенная через точку пересечения его диагоналей, совпадает с вертикальной осью приемной антенны; для антенн с «пирамидальной» геометрией - гидрофоны необходимо располагать в точках, соответствующих пространственному расположению вершин правильной треугольной пирамиды, высота которой совпадает с вертикальной осью приемной антенны.
На фиг. 2 представлен пример структуры последовательного составного сигнала маяка-пингера, в которой навигационный сигнал является гармоническим, а информационный - фазоманипулированным. В общем контексте заявляемого способа, навигационную и информационную части составного сигнала маяка-пингера передают в последовательном или параллельном виде с использованием ортогональных, противоположных или отличающихся по форме сигналов, обладающих хорошей различимостью при осуществлении приема. В этой связи следует заметить, что очередность передачи с подводного объекта навигационной и информационной частей последовательного навигационно-информационного сигнала может быть произвольной. Более того, навигационная часть навигационно-информационного сигнала может быть и модулированным сигналом, а информационная часть может служить навигационным сигналом.
На фиг. 3 показано позиционирование гидрофонов в декартовой системе координат судовой приемной антенны для ее «диаметрально-ортогональной» геометрии, где Г1-Г4 - сферические гидрофоны приемной антенны; λ - длина волны колебаний навигационной части составного сигнала маяка-пингера; ϕ - азимутальный угол; θ - угол места.
Фиг. 4 отображает пример функционального состава судового оборудования при технической реализации заявляемого способа для последовательного составного сигнала маяка-пингера, представленного на фиг. 2, где 1 - судовая приемная антенна; 2 - усилители сигналов гидрофонов; 3 - частотные фильтры; 4 - демодулятор информационного сигнала; 5 - измеритель разностей фаз навигационного сигнала; 6 - вычислитель; 7 - устройство отображения навигационных характеристик.
Выходы судовой приемной антенны 1 подключены ко входам усилителей 2 сигналов гидрофонов, связанных выходами со входами частотных фильтров 3, выходы которых соединены со входами демодулятора 4 информационного сигнала и измерителя 5 разностей фаз навигационного сигнала, выходами связанных со входами вычислителя 6, выходы которого подключены ко входам устройства 7 отображения навигационных характеристик.
На фиг. 5 и фиг. 6 изображены абсолютные погрешности определения угловых координат подводного объекта при использовании заявляемого способа позиционирования.
Сущность и пример технической реализации заявляемого способа заключаются в следующих действиях и операциях.
Акустический составной сигнал маяка-пингера (фиг. 2) подводного объекта формируют последовательным излучением гармонических (навигационная часть) и фазоманипулированных (информационная часть) колебаний, принимают четырьмя сферическими гидрофонами приемной судовой антенны 1 с выбранной пространственной геометрией (фиг. 1) и максимальным расстоянием между гидрофонами, не превышающим длину волны излучаемых маяком-пингером колебаний навигационной части составного сигнала, усиливают до необходимого уровня усилителями 2 сигналов гидрофонов, фильтруют от помех частотными фильтрами 3.
Определяют в измерителе 5 разностей фаз навигационного сигнала разности фаз колебаний Δψ12, Δψ13, Δψ14 навигационной части составного сигнала маяка-пингера на выходах трех пар гидрофонов Г1-Г2, Г1-Г3, Г1-Г4 (фиг. 3) приемной антенны, усиленных усилителями 2 сигналов гидрофонов и отфильтрованных частотными фильтрами 3, после чего результаты отправляют в вычислитель 6.
Информационную часть составного сигнала маяка-пингера, где передается значение глубины погружения объекта, обрабатывают в демодуляторе 4 информационного сигнала и результат также отправляют в вычислитель 6.
В вычислителе 6 осуществляют ряд последовательно-параллельных вычислительных операций, в результате которых определяют навигационные характеристики подводного объекта.
Вначале вычисляют по формулам (1) базовые постоянные коэффициенты, которые связаны лишь с декартовыми координатами гидрофонов приемной антенны, их рассчитывают только один раз на этапе изготовления и установки приемной антенны и хранят в памяти вычислителя. Соотношения для расчетов указанных коэффициентов имеют следующий вид:
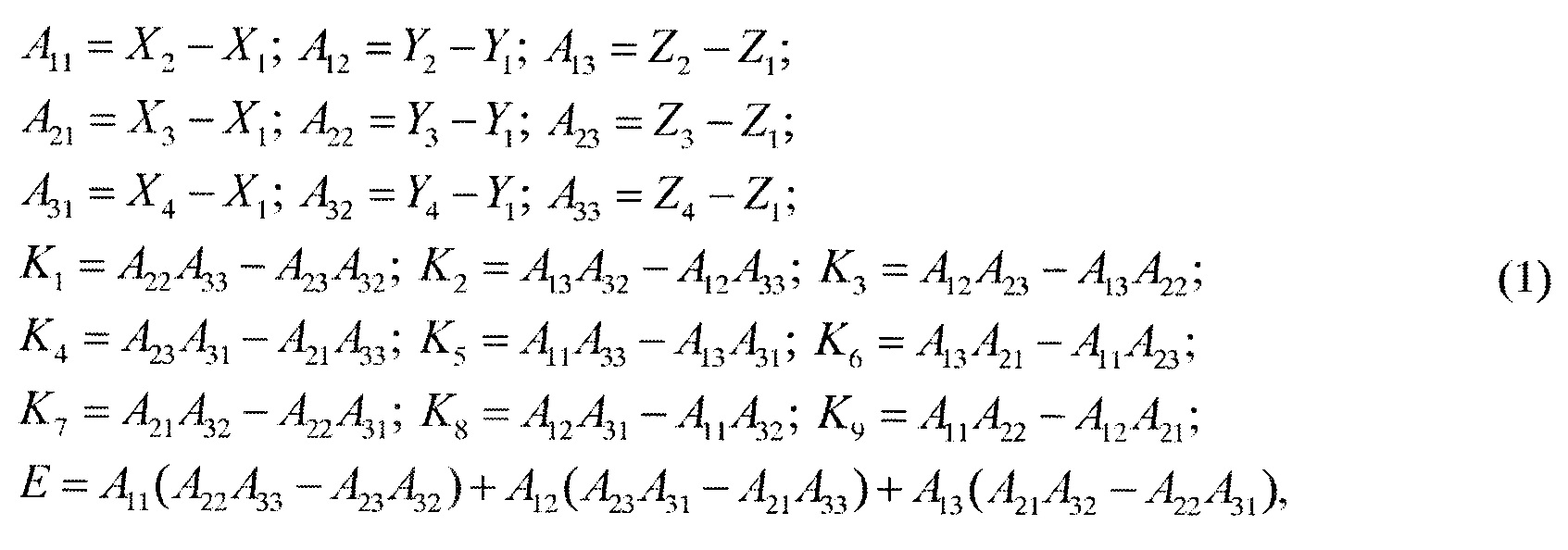
где X1,Y1,Z1; X2,Y2,Z2; X3,Y3,Z3; X4,Y4,Z4 - измеренные (м) декартовы координаты четырех сферических гидрофонов приемной антенны.
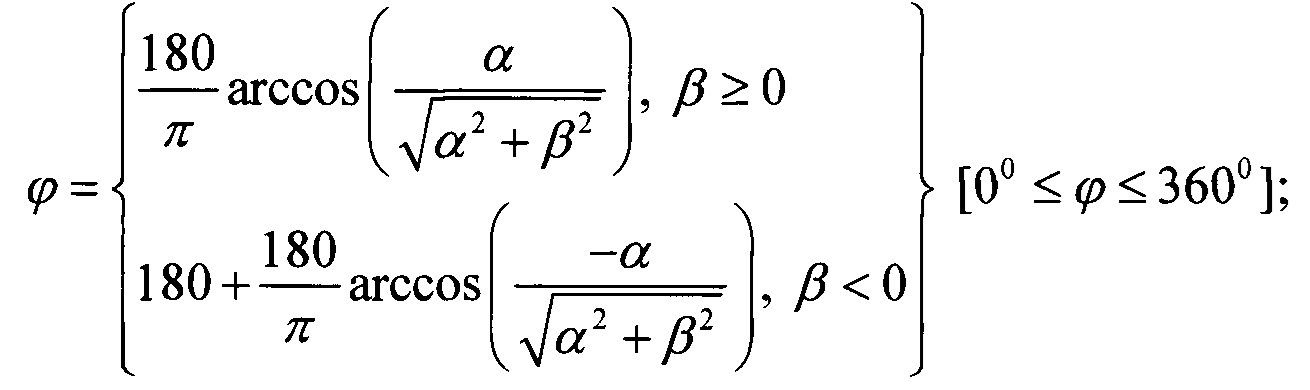
Затем по формулам (2) рассчитывают вспомогательные переменные коэффициенты α, β и γ:

где:

здесь m - единичный коэффициент размерности м2/с; Δψ12, Δψ13, Δψ14 - разности фаз (град.) колебаний навигационной части составного сигнала маяка-пингера на выходах трех пар гидрофонов (Г1-Г2, Г1-Г3, Г1-Г4) приемной антенны; ƒ - частота колебаний (Гц) навигационной части составного сигнала маяка-пингера.
После этого вычисляют навигационные характеристики подводного объекта в системе координат приемной антенны:
- азимут (град.) подводного объекта ϕ

- отсчитываемый от горизонтали, соответствующей водной поверхности, угол места (град.) подводного объекта в θ

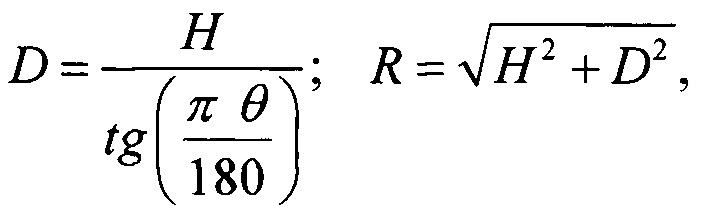
- дальность (м) подводного объекта D

- наклонное расстояние (м) до подводного объекта R

Рассчитанные в вычислителе 6 навигационные характеристики ϕ, θ, D, R подводного объекта передают в устройство 7 отображения навигационных характеристик, где визуально воспроизводят в удобном для потребления виде.
При технической реализации заявляемого способа может быть использована современная элементная база и цифровые технологии обработки сигналов.
Состав конструкционных элементов приемной антенны 1 определяется используемыми производственными технологиями и спецификой судна обеспечения.
Гидрофонами приемной антенны 1 могут служить, например, широкополосные сферические гидрофоны компании Брюль и Къер модели 8105. Гидрофоны указанной модели [3] имеют необходимые для реализации заявляемого способа диаграммы направленности в нижнем полупространстве: 360° - в азимутальной плоскости и 270° - в угломестной.
Усилители 2 сигналов гидрофонов могут иметь самые разнообразные исполнения, например, реализацию на базе прецизионных дифференциальных малошумящих операционных усилителей МАХ44250, МАХ44251, МАХ44252 с автоматической калибровкой смещения и установкой нуля [4].
Реализацию частотных фильтров 3, в целях устранения влияния разбросов их фазочастотных характеристик на точность измерения разностей фаз, можно осуществить в цифровом виде. Исходя из удобства проектирования, линейности фазочастотных характеристик и гарантированной устойчивости, предпочтение следует отдать цифровым фильтрам нерекурсивной структуры [5]. Современные методики расчетов цифровых фильтров нерекурсивной структуры, с использованием различных методов, представлены, например, в источниках [6] и [7].
Аппаратной платформой для реализации цифровых фильтров могут служить, например, микропроцессоры компании Analog Devices семейства ADSP-21xx [8].
Демодулятор 4 информационного сигнала и измеритель 5 разностей фаз навигационного сигнала могу быть реализованы, например, на базе микроконтроллеров семейства megaAVR, оснащенных памятью программ и данных большого объема при быстродействии до 20 млн. операций в секунду, поддерживающих самопрограммирование [9].
В качестве эффективной процедуры обработки информационного сигнала в демодуляторе 4 может быть использован, например, алгоритм демодуляции сигналов относительной фазовой модуляции известного способа [10].
В измеритель 5 разностей фаз навигационного сигнала может быть заложен, специально разработанный для цифровой реализации, алгоритм вычисления разности фаз повышенной эффективности [11].
Вычислитель 6 может быть выполнен, например, на базе микроконтроллеров семейства atmelAVR с архитектурой RISC (Reduced Instruction Set Computers). RISC-процессоры просты, имеют ограниченный набор команд и высокое быстродействие [12].
В качестве устройства 7 отображения навигационных характеристик могут быть использованы, например, судовой компьютер или промышленный ноутбук, оснащенные программой ЭКНИС, отображающей информацию о координатах подводного объекта с привязкой к электронным навигационным картам и интегрированием в системы глобального позиционирования [13]. Возможно использование альтернативной, менее дорогостоящей, программы dKart Navigator [14].
Сравним точности позиционирования наблюдаемого подводного объекта при использовании заявляемого способа и способа-прототипа.
Ширина диаграммы направленности (по уровню половинной мощности) судовой полуволновой дипольной антенны в способе-прототипе рассчитывается известным образом [15] и составляет 78°.
Минимальная среднеквадратическая погрешность оценки пеленга (азимута) подводного объекта в амплитудном методе пеленгации способа-прототипа [16] вычисляется на основе соотношения:

где Θ0.5 - ширина диаграммы направленности судовой приемной антенны по уровню половинной мощности, h2 - отношение сигнал/шум в водной среде.
Даже при больших отношениях сигнал/шум (h2=40 дБ) минимальная среднеквадратическая погрешность оценки азимута подводного объекта, рассчитанная по формуле (8), составляет σmin=4,4°, что приводит, например, на дальности 500 м к ошибке пеленгования по траверсу (линии перпендикулярной направлению на объект) в 39 м.
Наибольший вклад в ошибки определения угловых координат объекта заявляемого способа позиционирования (соотношения (2) - (5)) вносят погрешности оценок разностей фаз колебаний Δψ12, Δψ13, Δψ14, возникающие в измерителе 5 разностей фаз навигационного сигнала.
Современные цифровые алгоритмы определения разности фаз колебаний, реализованные, например, в измерительных приборах, позволяют обеспечивать абсолютные погрешности измерений на уровне ±0,1° [17].
На фиг. 5 и фиг. 6 представлены графики зависимостей минимальных абсолютных погрешностей оценок азимута Δϕ и угла места Δθ подводного объекта как функции от ϕ (ϕ=0° … 360°) - всех возможных азимутов наблюдаемого объекта, рассчитанные в математической среде Mathcad 15 на основе соотношений (1) - (5) для следующих, практически интересных, исходных данных:
- частота колебаний навигационной части составного сигнала маяка-пингера ƒ=5 кГц;
- габаритные параметры судовой приемной антенны с «диаметрально-ортогональной» геометрией расположения гидрофонов Х1-Х2=Y3-Y4=0,2 м, X3=Х4=Y1=Y2=Z1=Z2=0, Z3=Z4=-0,1 м;
- дальность подводного объекта D=500 м;
- углы места подводного объекта θ=20° (фиг. 5), θ=60° (фиг. 6);
- абсолютные погрешности оценок разностей фаз колебаний Δψ12, Δψ13, Δψ14 составляют ±0,5°.
Представленные зависимости показывают, что абсолютные погрешности оценок азимута Δϕ для угла места подводного объекта θ=20° не превышают величины ± 0,12°, а для угла места θ=60°- значения ±0,22°. При этом ошибки пеленгования по траверсу составляют 1,0 м и 1,8 м соответственно. Это свидетельствует об увеличении от 20 до 37 раз точности пеленгования подводного объекта при использовании заявляемого способа по сравнению со способом-прототипом.
Используя геометрию прямоугольного треугольника, нетрудно оценить ошибки определения наклонного расстояния до подводного объекта R в заявляемом способе и в способе-прототипе. Если, для определенности, считать, что наблюдаемый объект находится от судна на расстоянии 500 м с углом места 20°, а перепад рельефа дна на этой дальности составляет 10 м (например, глубина под судном на 10 м меньше глубины погружения объекта), то из геометрического построения двух прямоугольных треугольников ошибка определения наклонной дальности в способе-прототипе будет составлять 3 м.
В заявляемом способе для оценки наклонной дальности используются два параметра: глубина погружения и угол места наблюдаемого объекта, причем последний параметр определяется с точностью не хуже 0,15° (фиг. 5 и фиг. 6, зависимости Δθ=ƒ(ϕ) ), а с учетом применения на подводном объекте современных датчиков давления [18], позволяющих определять глубину его погружения с точностью не хуже 0,1 м, ошибка определения наклонной дальности в заявляемом способе будет составлять 0,3 м, то есть обеспечивается повышение точности определения наклонной дальности до подводного объекта в 10 раз.
Таким образом, совокупные характеристики заявляемого способа свидетельствуют о повышении точности определения местоположения подводного объекта, превосходя функциональные возможности известного прототипа.
Следует отметить, что в заявляемом способе для определения навигационных характеристик подводного объекта не требуется знание скорости звука в водной акватории, ошибка измерения которой приводит к увеличению ошибок определения навигационных характеристик подводного объекта в прототипе, не требуется использования на судне высокостабильного генератора опорных сигналов, предварительно синхронизированного с соответствующим генератором опорных сигналов на подводном объекте, расхождение частот указанных генераторов с течением времени приводит также к дополнительному увеличению ошибок определения навигационных характеристик подводного объекта в прототипе.
При этом в заявляемом способе нет необходимости обеспечивать постоянство периода передачи навигационного сигнала от подводного объекта, периодичность передачи составного навигационно-информационного сигнала может быть произвольной, например, осуществляться по запросу с судна обеспечения.
Кроме того, применение заявляемого способа сокращает затраты времени на определение навигационных характеристик подводного объекта: на судне достаточно приема одного составного навигационно-информационного сигнала, а в прототипе для определения местоположения подводного объекта необходимы затраты времени, как минимум, на один оборот судовой приемной антенны вокруг своей вертикальной оси (сканирование наблюдаемого пространства), за это время на судне должен осуществиться прием целого ряда периодических навигационных сигналов от подводного объекта.
Необходимо также отметить, что возможности заявляемого способа могут быть дополнительно расширены путем передачи от подводного объекта в составе информационной части составного навигационно-информационного сигнала маяка-пингера вместе с глубиной погружения подводного объекта еще и его идентификатора (уникального адреса), который присваивается ему до спуска под воду.
Применение идентификаторов позволяет судну обеспечения определять в поочередном режиме навигационные характеристики нескольких подводных объектов. Максимальное количество подводных объектов, навигационные характеристики которых могут определяться судном, ограничено только размером алфавита адресов, которые могут передаваться в составе информационной части составного навигационно-информационного сигнала маяка-пингера.
Все это указывает на расширение функциональных возможностей заявляемого способа по сравнению со способом-прототипом.
Предлагаемое техническое решение позволяет достичь желаемого эффекта (устранение недостатков прототипа и расширение его функциональных возможностей) за счет до сих пор не применявшегося сочетания: использования составного навигационно-информационного сигнала маяка-пингера подводного объекта, четырех элементной судовой приемной антенны с пространственной геометрией размещения сферических гидрофонов и заявляемой последовательности операций по обработке сигналов с выходов элементов приемной антенны.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Гидроакустическая навигационная система с ультракороткой базой [Электронный ресурс] / Режим доступа: http://edboe.ru - 05.2017 г. Загл. с экрана.
2. Патент RU 2593651, МПК G01S 15/00. Гидроакустический способ определения местоположения автономного подводного аппарата [Текст] / Комаров B.C., Клюев М.С., Шрейдер А.А. - заявлено 09.06.2015, опубликовано 10.08.2016.
3. Сведения об изделии [Электронный ресурс] / Гидрофоны: типы 8103-8106 - Режим доступа: http://asm-tm.ru/wp-content/uploads/2014/08/8101-8106-Gidrofony-NEW-PD.pdf-05.2017 г. Загл. с экрана.
4. Прецизионные малошумящие операционные усилители [Электронный ресурс] / Основные характеристики и области применения - Режим доступа: http://www.symmetron.ru/news/maxim-MAX44250.shtml - 05.2017 г. Загл. с экрана.
5. Математические основы обработки сигналов [Электронный ресурс] / Цифровые фильтры - Режим доступа: http://portal.tpu.ru/SHARED/v/VOS/study/discl/Tab/tema09.pdf - 05.2017 г. Загл. с экрана.
6. Макаренко, А.А. Расчет цифровых фильтров методом автоматизированного проектирования [Текст] / А.А. Макаренко, М.Ю. Плотников. - Учебное пособие. -СПб: НИУИТМО, 2014. - 50 с.
7. Синтез и анализ цифровых фильтров с использованием программного пакета MatLab [Электронный ресурс] / Структуры цифровых фильтров и соответствующие им алгоритмы цифровой фильтрации - Режим доступа: http://www.mai-trt.ru/docs/edu/rtc_tut_01.pdf - 05.2017 г. Загл. с экрана.
8. Дурнаков, А.А. Архитектура и система команд цифровых сигнальных процессоров семейства ADSP-21xx [Текст] / А.А. Дурнаков, Н.А. Дядьков. - Учебное электронное текстовое издание. - Екатеринбург: УрФУ. 2012. - 46 с.
9. Микроконтроллеры семейства megaAVR [Электронный ресурс] / Характеристики микроконтроллеров - Режим доступа: http://microkontroller.ru/mikrokontrolleryi-avr-atmega-attiny - 05.20.17 г. Загл. с экрана.
10. Патент RU 2450470, МПК H04L 27/22. Способ демодуляции сигналов относительной фазовой модуляции и устройство для его осуществления [Текст] / Криволапое Г.И., Криволапое Т.Г. - заявлено 25.11.2010, опубликовано 10.05.2012.
11. Воронов, А.С. Измерение разности фаз сигналов [Текст] / А.С. Воронов. - Горизонты образования, №9. - 2007. - С. 1-2.
12. Микроконтроллеры atmelAVR [Электронный ресурс] / Характеристики микроконтроллеров - Режим доступа: http://www.atmel.com/ru/ru/products/microcontrollers/avr - 05.2017 г. Загл. с экрана.
13. Электронно-картографическая навигационно-информационная система [Текст] / Полное руководство пользователя: версия 5.0.84 - Москва: NAVMARINE, 2012. - 209 с.
14. Лобастов, В.М. Электронная картографическая система «dKart Navigator» [Текст] / В.М. Лобастов. - Учеб. пособие. - Владивосток: МГУ им. адм. Г.И. Невельского, 2004. - 80 с.
15. Диаграмма направленности [Электронный ресурс] / Диаграмма направленности полуволнового диполя - Режим доступа: http://www.radiouniverse.ru/book/lyubitelskie-antenny-korotkih-i-ultrakorotkin-voln/diagramma-napravlennosti - 05.2017 г. Загл. с экрана.
16. Амплитудные пеленгаторы [Электронный ресурс] / Погрешности пеленгации - Режим доступа: http://books.sernam.ru/book_rds.php?id=63 - 05.2017 г. Загл. с экрана.
17. Измеритель разности фаз Ф2-34 [Электронный ресурс] / Техническое описание и инструкция по эксплуатации - Режим доступа: http://www.astena.ru/teh_10.html -05.2017 г. Загл. с экрана.
18. Свинолупов, Ю.Г. Конструктивные и метрологические характеристики измерителя глубины погружения подводного аппарата [Текст] / Ю.Г. Свинолупов. А.А. Машкин, Н.А. Братин. - Стандартизация и управление качеством продукции. - Известия ЮФУ. Технические науки, 2015. С 179-191.
Реферат
Изобретение относится к области подводной навигации, а именно к определению местоположения подводного объекта посредством гидроакустической навигационной системы, и может быть использовано для определения навигационных характеристик (азимута, угла места, дальности, наклонного расстояния) подводного объекта. Достигаемый технический результат - повышение точности позиционирования и расширение функциональных возможностей за счет использования составного навигационно-информационного сигнала маяка-пингера, четырехэлементной приемной антенны с пространственной геометрией. размещения сферических гидрофонов и соответствующей процедуры обработки сигналов приемной антенны. Указанный результат достигается за счет того, что на подводном объекте формируют и передают на судно обеспечения составной сигнал маяка-пингера, состоящий из навигационной и информационной частей, применяют для приема сигнала от подводного объекта четырехэлементную приемную антенну с пространственным размещением сферических гидрофонов, исключающим их расположение в одной плоскости, и максимальным расстоянием между гидрофонами, не превышающим длину волны излучаемых маяком-пингером колебаний навигационной части составного сигнала, измеряют декартовы координаты гидрофонов приемной антенны, определяют разности фаз колебаний навигационной части составного сигнала маяка-пингера на выходах трех пар гидрофонов приемной антенны, вычисляют азимут, угол места, дальность и наклонное расстояние до подводного объекта с использованием соотношений, связывающих декартовы координаты гидрофонов приемной антенны, измеренные разности фаз колебаний навигационной части составного сигнала маяка-пингера на выходах трех пар гидрофонов приемной антенны, частоту колебаний навигационной части составного сигнала и глубину погружения подводного объекта, значение которой передается в информационной части составного сигнала маяка-пингера. 8 з.п. ф-лы, 6 ил.
Формула





Комментарии