Способ и устройство для определения местоположения движущегося объекта посредством использования связи с помощью света в видимой области спектра - RU2406232C2
Код документа: RU2406232C2
Чертежи





Описание
Уровень техники изобретения
Настоящее изобретение в целом относится к системе определения местоположения, которая использует связь с помощью света в видимой области спектра. Более точно, изобретение относится к системе определения местоположения, которая определяет местоположение движущегося объекта, такого как транспортное средство.
В последние годы системы определения местоположения, использующие глобальную систему определения местоположения (GPS), широко использовались в качестве систем для определения текущего местоположения транспортного средства, иллюстративным примером которого является автомобиль. Каждая система определения местоположения этого типа, например, включена в автомобильное навигационное устройство.
Недавно системы определения местоположения, которые используют систему связи с помощью света в видимой области спектра, были предложены в качестве систем определения местоположения высокой точности. Система связи с помощью света в видимой области спектра использует видимые оптические сигналы и может передавать видимые оптические сигналы, модулированные данными местоположения, которые необходимы для функции определения местоположения (например, смотрите публикацию № 2007-81703 заявки на выдачу патента Японии).
Видимые оптические сигналы, используемые в такой системе определения местоположения, могут использоваться в сочетании со стереоскопическими видеоданными, формируемыми множеством видеокамер, установленных на транспортном средстве. Это дает возможность определять текущее местоположение, например, автомобиля, двигающегося по дороге.
Любая система, которая использует множество камер, установленных на каждом транспортном средстве, однако, является дорогостоящей вследствие не только использования камер, но также использования устройства, которое выполняет сложную обработку сигналов, такую как обработка стереоскопических видеосигналов. Ввиду этого, система определения местоположения этого типа вряд ли может быть введена в практическое использование.
Краткая сущность изобретения
Цель настоящего изобретения состоит в том, чтобы предложить систему определения местоположения, которая использует систему связи с помощью света в видимой области спектра и по-прежнему может быть легко введена в практическое использование.
Согласно одному из аспектов этого изобретения, предложена система определения местоположения, которая использует маяк связи с помощью света в видимой области спектра и средство фотографирования с одним объективом. Маяк испускает данные местоположения в виде видимых оптических сигналов. Однообъективное средство фотографирования содержит камеру и формирует видеоданные, представляющие изображение, сфотографированное камерой.
Система определения местоположения, согласно этому аспекту изобретения, содержит: узел передачи, который расположен в фиксированном месте и передает видимый оптический сигнал, модулированный данными местоположения, включающими в себя данные высоты; однообъективное средство фотографирования, которое предусмотрено на движущемся объекте и фотографирует узел передачи; узел получения данных, который предусмотрен на движущемся объекте и принимает видимый оптический сигнал, и получает данные местоположения из видимого оптического сигнала; и узел определения, который предусмотрен на движущемся объекте и использует видеоданные, сформированные однообъективным средством фотографирования, тем самым определяя местоположение движущегося объекта.
Согласно изобретению предусмотрено устройство для определения местоположения движущегося объекта, содержащее:
узел (15) приема, который принимает видимый оптический сигнал, модулированный данными местоположения, включающими в себя данные высоты, которые передаются из узла (31) передачи, расположенным в фиксированном месте; узел (13) демодуляции, который демодулирует видимый оптический сигнал, тем самым, восстанавливая данные местоположения;
однообъективный узел (19) фотографирования, который фотографирует объект, расположенный в фиксированном месте, и выводит видеоданные, представляющие изображение объекта; и
узел (10) определения, которые использует видеоданные, выдаваемые однообъективным узлом (19) фотографирования, тем самым, определяя местоположение движущегося объекта, отличающийся тем, что узел (10) определения содержит:
узел расчета расстояния, которые использует видеоданные и данные местоположения, тем самым, вычисляя расстояние между текущим местоположением движущегося объекта и фиксированным местом; и
узел коррекции местоположения, который использует расстояние, рассчитанное узлом расчета расстояния, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места, тем самым, рассчитывая текущее местоположение движущегося объекта.
При этом узел (31) передачи предусмотрен на лампе (3) для освещения дороги, на которой находится движущийся объект, такой как транспортное средство, и включает в себя:
узел (36) хранения, который сохраняет данные местоположения, включенные в видимый оптический сигнал; и
узел (34) возбуждения светоизлучающего элемента, который управляет и приводит в действие светоизлучающий элемент (32), предусмотренный на лампе (3) для освещения дороги, побуждая светоизлучающий элемент (32) передавать видимый оптический сигнал, модулированный данными местоположения, хранимыми в узле (36) хранения.
Кроме того, в устройстве узел (31) передачи предусмотрен на сооружении, таком как здание, и прикреплен к конструкции, которая способна передавать видимый оптический сигнал.
Кроме того, узел (10) определения содержит:
узел расчета высоты, который использует синтезированные видеоданные, подготовленные посредством синтезирования первых видеоданных, представляющих изображение, сфотографированное однообъективным узлом фотографирования, когда движущийся объект в первом местоположении, и вторых видеоданных, представляющих, изображение, сфотографированное однообъективным узлом фотографирования, когда движущийся объект достигает второго местоположения из первого местоположении, тем самым рассчитывая разность высот, которую фиксированное место имеет в синтезированном изображении, представленном синтезированными видеоданными; при этом
узел расчета расстояния, который использует разность высот, данные, включенные в данные местоположения, и расстояние между первым и вторым местоположениями, тем самым, рассчитывая расстояние между текущим местоположением движущегося объекта и фиксированным местом; и
узел коррекции/расчета, который использует расстояние, рассчитанное узлом расчета расстояния, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места, тем самым рассчитывая текущее местоположение движущегося объекта.
В заявленном устройстве движущийся объект является транспортным средством, а узел (15) приема включает в себя:
элемент приема света, который принимает видимый оптический сигнал, передаваемый из средства передачи, предусмотренного на лампе (3) для освещения дороги.
Согласно другому аспекту предусмотрен способ определения текущего местоположения движущегося объекта, посредством использования видимого оптического сигнала, который передается из узла передачи, расположенного в фиксированном месте, и который модулируется данными местоположения, включающими в себя данные высоты, при этом способ содержит этапы, при которых:
фотографируют объект, расположенный в фиксированном месте, посредством. использования однообъективного узла фотографирования, предусмотренного на движущемся объекте, посредством чего формируют видеоданные, представляющие изображение объекта;
принимают видимый оптический сигнал,
демодулируют видимый оптический сигнал, тем самым, восстанавливая данные местоположения; и
определяют положение движущегося объекта, отличающийся тем, что на этапе определения:
рассчитывают расстояние между текущим местоположением движущегося объекта и фиксированным местом, используя видеоданные и данные местоположения, и
рассчитывают текущее местоположение движущегося объекта, используя рассчитанное расстояние, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места.
Краткое описание некоторых изображений по чертежам
Прилагаемые чертежи, которые включены в состав и составляют часть описания изобретения, иллюстрируют варианты осуществления изобретения и вместе с общим описанием, приведенным выше, и подробным описанием вариантов осуществления, приведенным ниже, служат для разъяснения принципов изобретения.
Фиг.1 - схема, показывающая основные компоненты системы определения местоположения согласно варианту осуществления этого изобретения;
фиг.2 - схема, изображающая конфигурацию устройства связи с помощью света в видимой области спектра согласно варианту осуществления;
фиг.3 - схема, изображающая конфигурацию устройства определения местоположения транспортного средства согласно варианту осуществления;
фиг.4 - схема, поясняющая операцию определения местоположения, выполняемую системой, согласно варианту осуществления, и показывающая относительное положение, которое имеет едущее транспортного средство по отношению к маякам связи с помощью света в видимой области спектра;
фиг.5 - схема, поясняющая последовательность, вычислительных операций, которые система, согласно варианту осуществления выполняет, чтобы определять местоположение транспортного средства;
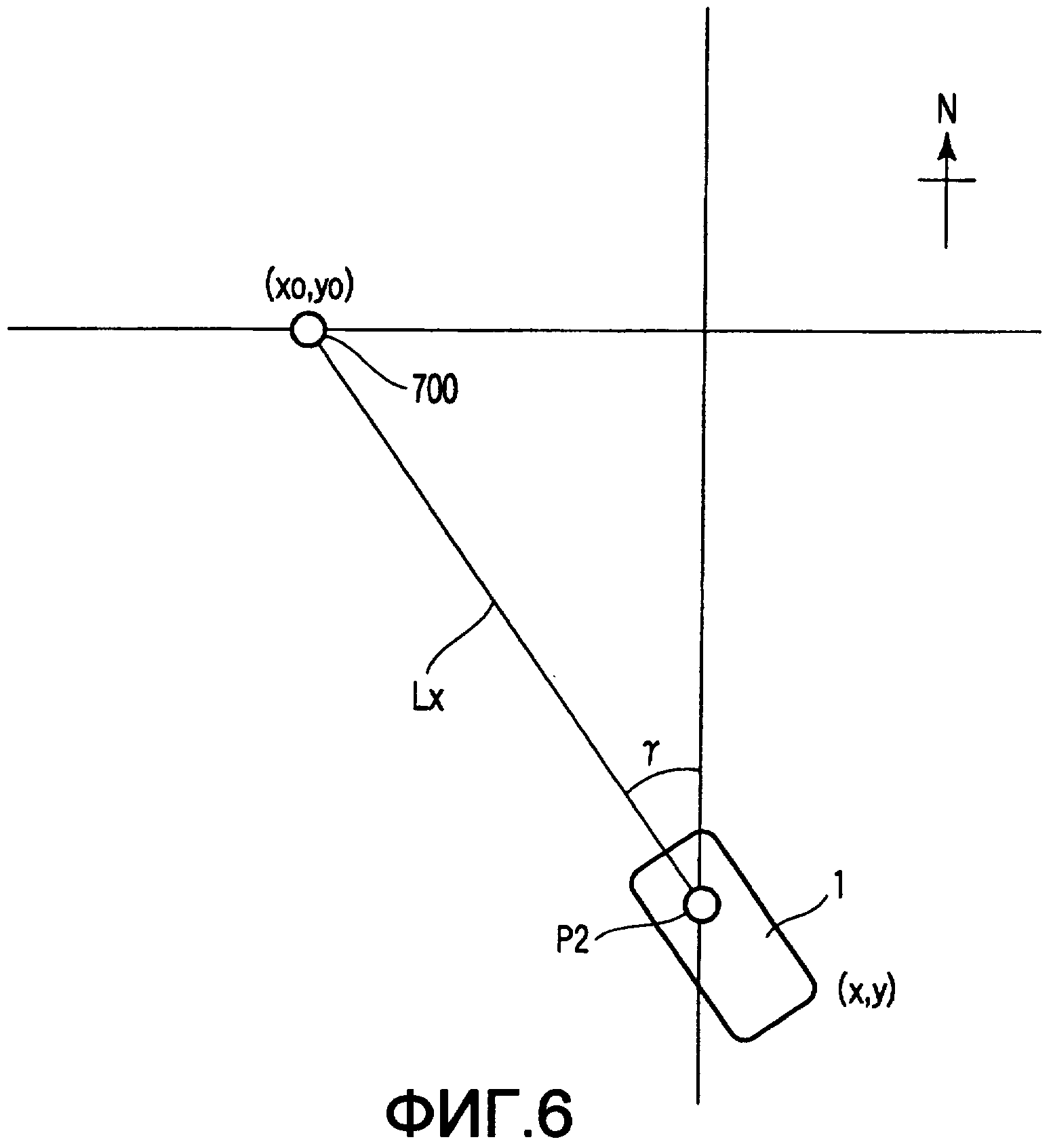
фиг.6 - схема поясняющая, каким образом система, согласно варианту осуществления, корректирует данные местоположения, для того чтобы определять местоположение транспортного средства; и
фиг.7 - блок-схема последовательности операций способа, поясняющая последовательность этапов, которые выполняет система согласно варианту осуществления.
Подробное описание изобретения
Вариант осуществления настоящего изобретения будет описан со ссылкой на прилагаемые чертежи.
Конфигурация системы
Фиг.1 - схема, показывающая основные компоненты системы определения местоположения согласно варианту осуществления изобретения.
Вариант осуществления является системой, которая определяет текущее местоположение автомобиля 1 (в дальнейшем упоминается как транспортное средство) посредством использования системы связи с помощью света в видимой области спектра. Основными компонентами системы являются: фонарный столб 3 и устройство 10 определения местоположения. Фонарный столб 3 стоит на одной стороне дороги 2, по которой двигается транспортное средство 1. Устройство 10 определения местоположения (в дальнейшем упоминаемое как устройство определения местоположения транспортного средства) установлено на транспортном средстве 1.
Фонарный столб 3 содержит лампу 30 для освещения дороги и устройство 31 связи с помощью света в видимой области спектра. Лампа 30 освещает дорогу 2. Лампа 30 содержит светоизлучающий диод (в дальнейшем упоминаемый как СИД (LED)) и испускает световое излучение 300 освещения. Таким образом, лампа 30 является маяком связи с помощью света в видимой области спектра, который будет описан позже.
Устройство 31 связи с помощью света в видимой области спектра приводит в действие и управляет СИД, включенным в лампу 30 для освещения дороги, и образует маяк связи с помощью света в видимой области спектра. Лампа испускает видимый оптический сигнал 310, который содержит данные местоположения. В дальнейшем компоновка, состоящая из фонарного столба 3, зафиксированного на месте, лампы 30 для освещения дороги и устройства связи с помощью света в видимой области спектра, будет называться «маяком связи с помощью света в видимой области спектра».
Устройство 10 определения местоположения транспортного средства принимает видимый оптический сигнал, передаваемый с маяка связи с помощью света в видимой области спектра. Видимый оптический сигнал демодулируется, обеспечивая данные о местоположении. По данным местоположения устройство 10 определения местоположения транспортного средства определяет текущее местоположение транспортного средства 1. Отметим, что данные местоположения включают в себя координатные данные (долготу и широту) и данные высоты. Координатные данные представляют местоположение маяка видимой связи с помощью света в видимой области спектра, который зафиксирован на месте. Данные высоты представляют расстояние от дороги 2 до лампы 30 для освещения дороги (другими словами, данные высоты представляют высоту «Н» маяка связи с помощью света в видимой области спектра).
Конфигурация устройства связи с помощью света в видимой области спектра.
Фиг.2 - схема, изображающая конфигурацию устройства 31 связи с помощью света в видимой области спектра, согласно варианту осуществления.
Как показывает фиг.2, устройство 31 связи с помощью света в видимой области спектра зафиксировано на месте у фонарного столба 3 и расположено около лампы 30 для освещения дороги. Устройство 31 имеет источник 33 питания, устройство 34 возбуждения СИД, устройство 35 управления связью и устройство 36 хранения. Устройство 34 возбуждения СИД приводит в действие СИД 32, который является светоизлучающим элементом лампы 30 для освещения дороги. Устройство 35 управления связью управляет устройством 34 возбуждения СИД, в конечном счете, многократно включая и выключая СИД 32. Приведенный в действие таким образом СИД 32 передает видимый оптический сигнал 310, модулированный данными местоположения, хранимыми в устройстве 36 хранения. Данные местоположения содержат вышеупомянутые данные высоты и координатные данные, представляющие местоположение маяка оптической световой связи в фиксированном месте.
Данные местоположения относительно маяка оптической световой связи были заранее сохранены в устройстве 36 хранения или были переданы по радио, а затем сохранены в устройстве 36 хранения. Устройство 31 связи с помощью света в видимой области спектра модулирует видимый свет, испускаемый СИД 32, данными местоположения, формируя видимый оптический сигнал 310 (видимый световой сигнал маяка). Видимый свет может модулироваться надлежащим способом, выбранным из различных способов, имеющихся в распоряжении, таких как двухпозиционное регулирование и модуляция RGB (красный-зеленый-синий).
Конфигурация устройства определения местоположения
Фиг.3 - схема, изображающая конфигурацию устройства 10 определения местоположения транспортного средства, согласно варианту осуществления.
Транспортное средство 1 содержит не только устройство 10 определения местоположения транспортного средства, но также устанавливаемое на автомобиле измерительное устройство 16 и устанавливаемую на автомобиле видеокамеру 19 (в дальнейшем называемую камерой). Как показывает фиг.3, устанавливаемое на автомобиле измерительное устройство 16 включает в себя узел 15 приема света, детектор 17 азимута и дальномер 18. Узел 15 приема света принимает видимый свет.
Узел 15 приема света является фотодиодным (PD) элементом и принимает видимый оптический сигнал, а также преобразует его в электрический сигнал, который подается в устройство 10 определения местоположения транспортного средства. Детектор 17 азимута и дальномер 18 присоединены к устройству 10 определения местоположения транспортного средства. Детектор 17 азимута детектирует азимут транспортного средства 1 и формирует сигнал азимута, а дальномер 18 определяет расстояние, которое прошло транспортное средство 1, и формирует сигнал расстояния. Сигнал 17 азимута и расстояние выводятся в устройство 10 определения местоположения транспортного средства. Камера 19 является однообъективным устройством фотографирования и формирует видеоданные, представляющие любое изображение, которое она сфотографировала. Видеоданные выводятся в устройство 10 определения местоположения транспортного средства.
Устройство 10 определения местоположения транспортного средства содержит узел 11 обработки данных, узел 12 обработки видеоданных, узел 13 связи с помощью света в видимой области спектра и интерфейс 14 устанавливаемого на автомобиле устройства. Узел 11 обработки данных выполняет операции, для того чтобы определять местоположение транспортного средства 1, как будет описано позже. Узел 12 обработки видеоданных обрабатывает видеоданные, поставляемые с камеры 19, формируя видеоданные. Эти видеоданные передаются в узел 11 обработки данных и будут использоваться для расчета высоты маяка оптической световой связи. Узел 11 обработки данных и узел 12 обработки видеоданных составляют микропроцессор или программное обеспечение. При этом узел 11 обработки данных включает узел расчета расстояния, узел коррекции местоположения, узел расчета высоты и узел коррекции/расчета.
Узел 13 связи с помощью света в видимой области спектра демодулирует видимый оптический сигнал (электрический сигнал), принимаемый узлом 15 приема света, таким образом, восстанавливая данные местоположения. Данные местоположения, восстановленные таким образом, передаются в узел 11 обработки данных. Между тем, интерфейс 14 устанавливаемого на автомобиле устройства принимает сигнал азимута и сигнал расстояния из детектора 17 азимута и дальномера соответственно и передает эти сигналы в узел 11 обработки данных.
Работа системы определения местоположения
Со ссылкой на фиг.4-7, будет пояснено, каким образом работает система определения местоположения согласно этому варианту осуществления.
Прежде всего, работа системы будет очерчена со ссылкой на фиг.4 и блок-схему последовательности операций способа по фиг.7.
Система определения местоположения, согласно этому варианту осуществления, выполнена для определения местоположения Р2 (второго местоположения), которое транспортное средство 1 принимает в текущий момент, после перемещения по дороге из местоположения Р1 (первого местоположения).
Дорога освещается светом, испускаемым из СИД 32 лампы 30 для освещения дороги. Лампа 30 для освещения дороги передает видимые оптические сигналы 20 в различных направлениях на дорогу. Сигналы 200 являются маяками связи с помощью света в видимой области спектра, каждый из которых зафиксирован в определенном месте и содержит данные местоположения.
Момент, в который транспортное средство 1 находится в местоположении Р1, узел 15 приема света принимает видимый оптический сигнал 200, испускаемый маяком связи с помощью света в видимой области спектра (этап S1). В устройстве 10 определения местоположения транспортного средства узел 13 связи с помощью света в видимой области спектра принимает видимый оптический сигнал 200 из узла 15 приема света и демодулирует сигнал 200 (электрический сигнал), восстанавливая данные местоположения. Данные местоположения передаются в узел 11 обработки данных.
На транспортном средстве 1 в местоположении Р1 камера 19 фотографирует лампу 30 для освещения дороги и фонарный столб 3, удерживающий лампу 30, в момент времени, когда узел 15 приема света принимает видимый оптический сигнал 200 (этап S1). В устройстве 10 определения местоположения транспортного средства узел 10 обработки видеоданных принимает изображение 100, сфотографированное камерой 19. Узел 12 обрабатывает изображение 100, формируя видеоданные. Видеоданные передаются в узел 11 обработки данных, так что может рассчитываться высота (Н) маяка связи с помощью света в видимой области спектра.
Когда транспортное средство 1 перемещается из местоположения Р1 в местоположение Р2, узел 15 приема света принимает видимый оптический сигнал 200, приходящий с маяка связи с помощью света в видимой области спектра. Одновременно камера 19 фотографирует маяк связи с помощью света в видимой области спектра (этап S2). То есть в устройстве 10 определения местоположения транспортного средства узел 13 связи с помощью света в видимой области спектра демодулирует видимый оптический сигнал 200, восстанавливая данные местоположения. Данные местоположения, восстановленные таким образом, передаются в узел 11 обработки данных.
Узел 11 обработки данных содержит внутреннюю память, которая сохраняет элементы данных местоположения, восстановленные в момент, когда транспортное средство 1 находится в местоположениях Р1 и Р2 соответственно. Узел 12 обработки видеоданных принимает изображение 100, сфотографированное камерой 19, формируя видеоданные. Видеоданные передаются в узел 11 обработки данных.
В устройстве 10 определения местоположения транспортного средства дальномер 18 определяет расстояние Lo, которое транспортное средство 1 прошло от местоположения Р1 до местоположения Р2, и формирует сигнал расстояния. Сигнал расстояния передается в узел 11 обработки данных устройства 10 определения местоположения транспортного средства. В узле 11 обработки данных данные, представляющие расстояние Lo, сохраняются во внутренней памяти.
В устройстве 10 определения местоположения транспортного средства узел 11 обработки данных синтезирует два элемента видеоданных, которые узел 12 обработки видеоданных получил в местоположениях Р1 и Р2 соответственно, формируя синтезированные видеоданные. С использованием синтезированных видеоданных данные местоположения и данные, представляющие расстояние Lo (расстояние, которое проехало транспортное средство 1), узел 11 обработки данных определяет расстояние Lx между местоположением (Р2) транспортного средства 1 и маяком связи с помощью света в видимой области спектра, а также координаты местоположения Р2 (этап S3).
В устройстве 10 определения местоположения транспортного средства узел 11 обработки данных дополнительно принимает данные, представляющие угол азимута, детектированный детектором 17 азимута в местоположении Р2 из устанавливаемого на автомобиле измерительного устройства 16 через интерфейс 14 устанавливаемого на автомобиле устройства. На основании угла азимута узел 11 обработки данных корректирует координаты местоположения Р2, тем самым рассчитывая текущее местоположение транспортного средства 1 (этап S4).
Последовательность расчета, которую устройство 10 определения местоположения транспортного средства, согласно варианту осуществления, выполняет для определения местоположения транспортного средства 1, будет подробно пояснена со ссылкой на фиг.5 и 6.
Прежде всего, при допущении, что транспортное средство 1 проехало из местоположения Р1 на дороге в местоположение Р2, будет пояснено, каким образом устройство 10 рассчитывает расстояние Lx между местоположением Р2 и маяком связи с помощью света в видимой области спектра. Здесь местоположение 700 маяка оптической световой связи, ради удобства, определено в качестве расстояния между лампой 30 для освещения дороги и пересечением поверхности дороги и перпендикуляра, тянущегося от лампы 30.
В устройстве 10 определения местоположения транспортного средства узел 11 обработки данных рассчитывает высоту h фонарного столба 3, которая измеряется в синтезированном изображении 600, полученном синтезированием двух элементов 400 и 500 видеоданных, собранных в местоположениях Р1 и Р2 узлом 12 обработки видеоданных. Как видно из фиг.5, высота h является разницей между высотой ha, которую имеет камера 19 в местоположении Р1, и точкой hb, в которой местоположение Р2 пересекается с линией, по которой лампа 30 для освещения дороги фотографируется под углом α.
Следующие соотношения с (1) по (5) выдерживаются в настоящем варианте осуществления.





где H - высота маяка 700 связи с помощью света в видимой области спектра, vh - высота камеры 19, установленной на транспортном средстве 1, a L - расстояние между местоположением Р1 и местоположением 700 маяка связи с помощью света в видимой области спектра.
Узел 11 обработки данных рассчитывает расстояние Lo между местоположениями Р1 и Р2 по расстоянию перемещения транспортного средства 1, определенному дальномером 18. Узел 11 обработки данных находит высоту Н маяка связи с помощью света в видимой области спектра по данным местоположения, полученным демодулированием видимого оптического сигнала 200, который принял узел 15 приема света.
Узел 11 обработки данных устройства 10 определения местоположения транспортного средства выполняет расчеты на основании соотношений с (1) по (5), заданных выше, находя расстояние Lx между транспортным средством 1, перемещенным в местоположение Р2 и местоположением 700 маяка связи с помощью света в видимой области спектра.
Последовательность расчета координат (х, у) местоположения Р2, в которое переместилось транспортное средство 1, будет пояснена со ссылкой на фиг.6.
Местоположение маяка связи с помощью света в видимой области спектра определяется координатами (хо, уо). Координаты являются данными местоположения, которые обычно представляют долготу и широту. В устройстве 10 определения местоположения транспортного средства узел 15 приема света принимает видимый оптический сигнал 200, а узел 13 связи с помощью света в видимой области спектра демодулирует сигнал 200, извлекая координаты (хо, уо). Данные местоположения, представляющие координаты (хо, уо), передаются в узел 11 обработки данных. Между тем, узел 11 обработки данных получает угол γ азимута из детектора 17 азимута устанавливаемого на автомобиле измерительного устройства 16 через интерфейс 14 устанавливаемого на автомобиле устройства.
Узел 11 обработки данных корректирует координаты (хо, уо) маяка связи с помощью света в видимой области спектра посредством использования соотношений (6) и (7), приведенных ниже, рассчитывая координаты (х, у) местоположения Р2, где в данный момент находится транспортное средство 1. Более точно, узел 11 обработки данных, корректирующий координаты (хо, уо) маяка, рассчитывает координаты (х, у) посредством использования расстояния Lx между транспортным средством 1 и местоположением маяка, рассчитывая координаты (х, у) местоположения Р2, то есть текущее местоположение транспортного средства 1.


В системе согласно этому варианту осуществления, узел 11 обработки данных может находить координаты (х, у) транспортного средства 1 по координатам (хо, уо) маяка связи с помощью света в видимой области спектра, расстоянию Lx между транспортным средством 1 и местоположением маяка,, и углу у азимута транспортного средства 1. Отметим, что расстояние Lx между устройством 1 и маяком может получаться посредством так называемой тригонометрической съемки с использованием синтезированного изображения, подготовленного синтезированием изображений, сфотографированных одной камерой 19.
То есть расстояние Lx между транспортным средством 1 и маяком может рассчитываться в системе, согласно изобретению, только с использованием однообъективной камеры 19 без использования множества камер или сложной обработки видеоданных, такой как обработка стереоскопических изображений. Отсюда расстояние Lx может рассчитываться при более низкой стоимости, чем в случае, где используется множество камер. Более того, система, согласно варианту осуществления, может быть легко введена в практическое использование, так как большинство автомобилей, производимых и продаваемых в последнее время, - все содержат одну камеру. В дополнение система, согласно варианту осуществления, может находить координаты транспортного средства 1 с высокой точностью, так как координаты (хо, уо) маяка корректируются.
Таким образом, вариант осуществления может предоставить систему определения местоположения, которая использует систему связи с использованием света в видимой области спектра и по-прежнему может быть легка для использования при низкой стоимости.
В варианте осуществления, описанном выше, маяк связи с помощью света в видимой области спектра составлен лампой 30 для освещения дороги, расположенной в фиксированном месте. Однако маяк связи с помощью света в видимой области спектра, например, может быть составлен лампой для освещения такого типа, который находит применение в зданиях или сооружениях. Кроме того, маяку связи с помощью света в видимой области спектра не требуется быть объединенным с лампой для освещения. Он может быть независимым устройством, которое передает видимые оптические сигналы.
Дополнительные преимущества и модификации будут очевидны для специалистов в данной области техники. Поэтому изобретение в его более широких аспектах не ограничено отдельными подробностями и характерными вариантами осуществления, показанными и описанными в материалах настоящей заявки. Соответственно, различные модификации могут быть произведены, не выходя из сущности и объема общей изобретательной концепции, которые определены прилагаемой формулой изобретения и ее эквивалентами.
Реферат
Изобретение относится к системе определения местоположения транспортного средства. Технический результат достигается посредством использования системы связи с помощью света в видимой области спектра. Устройство использует маяк связи с помощью света в видимой области спектра и видеоданные, представляющие изображение, сфотографированное камерой. Маяк испускает видимый оптический сигнал (310), таким образом передавая данные местоположения. Маяк связи с помощью света в видимой области спектра содержит лампу (30) для освещения дороги и устройство (31) связи с помощью света в видимой области спектра, оба прикрепленные к фонарному столбу (3). Транспортное средство (1) имеет камеру и устройство (10) определения местоположения транспортного средства. Устройство (10) определения местоположения транспортного средства демодулирует видимый оптический сигнал (310), восстанавливая данные местоположения в этом месте, и рассчитывает текущее местоположение транспортного средства (1) по данным местоположения. 2 н. и 4 з.п. ф-лы, 7 ил.
Формула
узел (15) приема, который принимает видимый оптический сигнал, модулированный данными местоположения, включающими в себя данные высоты, которые передаются из узла (31) передачи, расположенного в фиксированном месте;
узел (13) демодуляции, который демодулирует видимый оптический сигнал, тем самым, восстанавливая данные местоположения;
однообъективный узел (19) фотографирования, который фотографирует узел (31) передачи, расположенный в фиксированном месте, и выводит видеоданные, представляющие изображение фотографируемого узла (31) передачи; и
узел (10) определения, который использует видеоданные, выдаваемые однообъективным узлом (19) фотографирования, тем самым, определяя местоположение движущегося объекта, отличающийся тем, что узел (10) определения содержит:
узел расчета расстояния, который использует видеоданные и данные местоположения, тем самым, вычисляя расстояние между текущим местоположением движущегося объекта и фиксированным местом; и
узел коррекции местоположения, который использует расстояние, рассчитанное узлом расчета расстояния, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места, тем самым, рассчитывая текущее местоположение движущегося объекта.
узел (36) хранения, который сохраняет данные местоположения, включенные в видимый оптический сигнал; и
узел (34) возбуждения светоизлучающего элемента, который управляет и приводит в действие светоизлучающий элемент (32), предусмотренный на лампе (3) для освещения дороги, побуждая светоизлучающий элемент (32) передавать видимый оптический сигнал, модулированный данными местоположения, хранимыми в узле (36) хранения.
узел расчета высоты, который использует синтезированные видеоданные, подготовленные посредством синтезирования первых видеоданных, представляющих изображение, сфотографированное однообъективным узлом фотографирования, когда движущийся объект в первом местоположении, и вторых видеоданных, представляющих изображение, сфотографированное однообъективным узлом фотографирования, когда движущийся объект достигает второго местоположения из первого местоположении, тем самым рассчитывая разность высот, которую фиксированное место имеет в синтезированном изображении, представленном синтезированными видеоданными; при этом
узел расчета расстояния, который использует разность высот, данные, включенные в данные местоположения, и расстояние между первым и вторым местоположениями, тем самым, рассчитывая расстояние между текущим местоположением движущегося объекта и фиксированным местом; и
узел коррекции/расчета, который использует расстояние, рассчитанное узлом расчета расстояния, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места, тем самым рассчитывая текущее местоположение движущегося объекта.
элемент приема света, который принимает видимый оптический сигнал, передаваемый из средства передачи, предусмотренного на лампе (3) для освещения дороги.
фотографируют узел передачи, расположенный в фиксированном месте, посредством использования однообъективного узла фотографирования, предусмотренного на движущемся объекте, посредством чего формируют видеоданные, представляющие изображение фотографируемого узла передачи;
принимают видимый оптический сигнал;
демодулируют видимый оптический сигнал, тем самым, восстанавливая данные местоположения; и
определяют положение движущегося объекта, отличающийся тем, что на этапе определения:
рассчитывают расстояние между текущим местоположением движущегося объекта и фиксированным местом, используя видеоданные и данные местоположения, и
рассчитывают текущее местоположение движущегося объекта, используя рассчитанное расстояние, азимут, детектированный детектором азимута, предусмотренным на движущемся объекте, и координаты фиксированного места.
Комментарии