Магнитная резонансная томография с расширенной зоной обзора - RU2505803C2
Код документа: RU2505803C2
Чертежи




Описание
Область техники, к которой относится изобретение
Изобретение относится к системе магниторезонансного обследования, которая выполнена с возможностью перемещения отображаемого объекта.
Уровень техники
Такая магниторезонансная система исследований известна из международной заявки WO2006/111882.
У известной системы магниторезонансного обследования есть режим работы, который включает в себя магнитный метод непрерывно движущегося стола, в котором осуществляется «боковое» считывание, поперечное направлению движения. Суб-объем возбуждается за счет пространственно селективного высокочастотного возбуждения, которое движется при движении объекта для соответствующих подгрупп первичного фазового кодирования. Прием магниторезонансных сигналов осуществляется из трехмерного суб-объема объекта. Магниторезонансные сигналы считываются в закодированном состоянии в направлении, перпендикулярном направлению движения объекта, а подвергаются фазовому кодированию, по меньшей мере, в направлении движения объекта. Таким образом, расширяется зона действия для формирования изображений системы для магниторезонансных исследований.
Сущность изобретения
Задачей изобретения является расширение зоны действия для формирования изображений системы магниторезонансного обследования.
Эта задача достигается в системе магниторезонансного обследования согласно изобретению, включающей в себя:
- систему приема и накопления для приема магниторезонансных сигналов;
- передвижную опору, поддерживающую обследуемый объект;
- контроллер для управления системой приема и опорой, причем система для магниторезонансного обследования выполнена с возможностью:
- перемещения опоры по двумерной области;
- приема групп магниторезонансных сигналов от объекта, для получения различных позиций опоры в двумерной области.
Согласно изобретению, опора с объектом, т.е., с обследуемым пациентом, перемещают в двух независимых пространственных направлениях. Эти две степени свободы для перемещения объекта позволяют располагать различные части объекта в зоне формирования изображения системы магниторезонансного обследования. Зона формирования изображения представляет собой пространственную область, в которой достигается хорошее качество формирования изображения. Примечательно, в зоне формирования изображения система магниторезонансного обследования обладает постоянным магнитным полем, которое является до высокой степени пространственно однородным, а кодирующие градиентные магнитные поля обладают напряженностью магнитного поля, которое является строго пространственно линейным. Зона формирования изображения часто бывает меньше обследуемого объекта. На практике, зона формирования изображения обладает размером примерно 300 - 500 мм. Согласно изобретению, группы магниторезонансных сигналов с градиентным кодированием (с кодированием для считывания и с фазовым кодированием) принимаются с различных позиций опоры относительно зоны формирования изображения. То есть, для различных позиций опоры, зона обзора покрывает различные части объекта. Изобретение позволяет отображать крупные части, или даже весь отображаемый объект при высоком качестве изображения. Примечательно, что система магниторезонансного обследования согласно изобретению обладает преимуществами для выполнения обследования всего тела пациента. Примечательно, что система магниторезонансного обследования согласно изобретению облегчает перемещение различных частей объекта в зону формирования изображения для всестороннего исследования объекта, т.е., обследуемого пациента.
Преимущественно, изобретение внедряют в так называемую систему магниторезонансного обследования открытого типа. Система магниторезонансного обследования открытого типа имеет два магнитных полюса (или два полюсных наконечника), между которыми существует постоянное магнитное поле. Зона формирования изображения расположена между магнитными полюсами. Согласно изобретению, объект можно свободно перемещать в двумерном пространстве, в частности, перемещение происходит в плоскости, перпендикулярной направлению постоянного магнитного поля между двумя магнитными полюсными наконечниками.
Согласно одному аспекту изобретения, опору (с объектом, т.е., обследуемым пациентом) размещают в последовательно расположенных позициях. В соответствующих позициях опору удерживают в неподвижном состоянии, и принимают группу магниторезонансных сигналов для данной позиции. Это многостанционная технология, в которой для каждой станции принимается группа магнитрезонансных сигналов. При перемещении опоры прием магниторезонансных сигналов прекращается. Впоследствии, группы данных изображения для соответствующих позиций опоры реконструируют из каждой группы магниторезонансных сигналов. Эти реконструированные изображения затем объединяют в изображение большей части объекта, или даже всего объекта. Эта двумерная многостанционная технология может быть легко воплощена, поскольку осуществляется фактический прием магниторезонансных сигналов, тогда как опора неподвижна. Причем для приема магниторезонансных сигналов или реконструкции магниторезонансного изображения требуются лишь минимальные адаптации, по сравнению с одиночной станцией или приемом стационарного сигнала. Для объединения записей данных изображения, без искажений, требуется точная информация о местоположениях опоры.
Согласно другому аспекту изобретения для соответствующих боковых позиций опоры, при приеме магниторезонансных сигналов опору непрерывно перемещают в направлении непрерывного движения. Соответствующие боковые позиции перемещаются перпендикулярно направлению непрерывного движения. То есть, одномерная многостанционная технология (в поперечном направлении) сочетается с технологией непрерывного движения опоры в направлении непрерывного движения. Является предпочтительным, чтобы поперечное покрытие зоны приема сигналов непрерывно перемещающейся опоры составляло, по меньшей мере, одну ширину шага в боковом направлении между соседними боковыми позициями опоры. Таким образом, все поперечное расширение объекта можно покрывать, не пропуская части объекта, расположенные между различными боковыми позициями опоры.
Согласно другому аспекту изобретения, магниторезонансные сигналы принимаются в ходе непрерывного движения опоры в двух независимых направлениях. Таким образом, перемещение опоры происходит плавно, что легко переносится, или даже удобно для обследуемого пациента.
Согласно дополнительному аспекту изобретения, кодирование частоты применяют в направлении, перпендикулярном направлению непрерывного движения опоры в ходе приема магниторезонансных сигналов. В данном воплощении, фазовое кодирование применяют в направлении, перпендикулярном направлению поперечного движения. Кодирование частоты и фазовое кодирование осуществляют путем наложения магнитного поля с градиентом по времени через зону формирования изображения. Этот способ приема позволяет при обратном преобразовании Фурье помещать полученные данные в так называемое гибридное пространство (одно пространственное направление, и одно или два направления каонного пространства), что позволяет перемещать эти некогда преобразованные данные в направлении непрерывного движения. После завершения приема магниторезонансных сигналов для всех фазовых кодирований для каждого положения опоры в направлении непрерывного движения, можно осуществлять трансформацию в направлении (направлениях) фазового кодирования. Таким образом, реконструкцию (изображения) можно создавать построчно в виде объекта, продвигающегося в направлении непрерывного движения. При данном воплощении, опора перемещается в двух направлениях. Поскольку опора перемещается в первом направлении непрерывного движения, происходит прием сигналов в гибридном пространстве, как обсуждалось выше. Для каждого положения в первом направлении непрерывного движения, прием сигналов для последовательных положений во втором направлении непрерывного движения осуществляется, когда кодирование частоты перпендикулярно второму направлению непрерывного движения.
Согласно другому аспекту изобретения, кодирование частоты применяют перпендикулярно направлению непрерывного движения. Примечательно, кодирование частоты применяют перпендикулярно обоим независимым направлениям непрерывного движения. В результате, фазовые кодирования применяют параллельно направлению непрерывного движения, а кодирование частоты применяют вдоль направления, перпендикулярного двумерной плоскости, по которой перемещается опора.
Согласно еще одному аспекту изобретения, кодирование частоты переключают, когда направление непрерывного движения изменяется. То есть, в этом воплощении опора перемещается в двух направлениях непрерывного движения. Поскольку опора перемещается в первом направлении непрерывного движения, происходит прием сигналов в гибридном пространстве, как обсуждалось выше. Для каждой позиции в первом направлении непрерывного движения прием сигналов для последовательно расположенных позиций вдоль второго направления непрерывного движения представляет собой прием сигналов в гибридном пространстве, который осуществляют при кодировании частоты, переключаемой во втором направлении непрерывного движения.
Согласно другому аспекту изобретения, применяют супердискретизацию магниторезонансных сигналов в одном или обоих направлениях перемещения опоры. Супердискретизация позволяет избежать наложения спектров или свертывания магниторезонансных сигналов, исходящих из областей, которые находятся поблизости от части объекта, которая в настоящий момент находится в зоне формирования изображения. Является предпочтительным, чтобы супердискретизация применялась для обоих направлений непрерывного движения, для снижения искажений, вызванных некачественным подавлением сигнала или некачественным выбором пластины поперек направлений кодирования частоты.
Согласно еще одному аспекту изобретения, опора перемещается по противоположным направлениям в одном из направлений непрерывного движения. Эта технология не требует полного «откатывания» опоры к своему исходному положению вдоль одного из направлений непрерывного движения, при осуществлении приема магниторезонансных сигналов. То есть, опора может продвигаться по извилистой траектории, причем продвижение по противоположным направлениям в одном из направлений непрерывного движения чередуется с продвижением опоры по другому направлению непрерывного движения. Следовательно, при движении опоры, эффективный прием магниторезонансных сигналов достигается лишь с небольшим холостым ходом. Также допустимо продвижение по противоположным направлениям в обоих направлениях непрерывного движения.
Согласно другому аспекту изобретения, выбор пластины и/или подавление намагниченности осуществляют для выбора пластины вдоль направления движения опоры. Выбор пластины осуществляется с перемещением опоры. Эта технология подавляет свертывание сигналов или наложение искажений, вызванных областями, находящимися рядом с выбранной пластиной.
Изобретение также относится к способу магниторезонансного обследования по п.12 формулы изобретения. Способ магниторезонансной томографии согласно изобретению достигает расширения покрытия области обследуемого объекта с низким уровнем искажений. Изобретение, в частности, применимо для диагностической магниторезонансной томографии. Изобретение также можно применять в целях магниторезонансной спектроскопии, при которой магниторезонансная спектрографическая информация принимается для различных частей объекта по мере движения опоры по различным местоположениям.
Кроме того, изобретение относится к компьютерной программе по п.13 формулы изобретения. Компьютерная программа согласно изобретению может быть обеспечена на носителе данных, таком как компакт-диск или USB-память, или компьютерная программа согласно изобретению может быть скачана из сети передачи данных, такой как всемирная паутина. Будучи установленной на компьютере, включенном в систему формирования магниторезонансных изображений, система формирования магниторезонансных изображений способна функционировать в соответствии с изобретением и достигать широкой зоны обзора.
Эти и другие аспекты изобретения в дальнейшем будут уточнены со ссылкой на варианты воплощения, определенные в зависимых пунктах формулы изобретения.
Эти и другие аспекты изобретения будут освещены со ссылкой на варианты воплощения, описанные ниже, и со ссылкой на прилагаемые чертежи, на которых:
Краткое описание чертежей
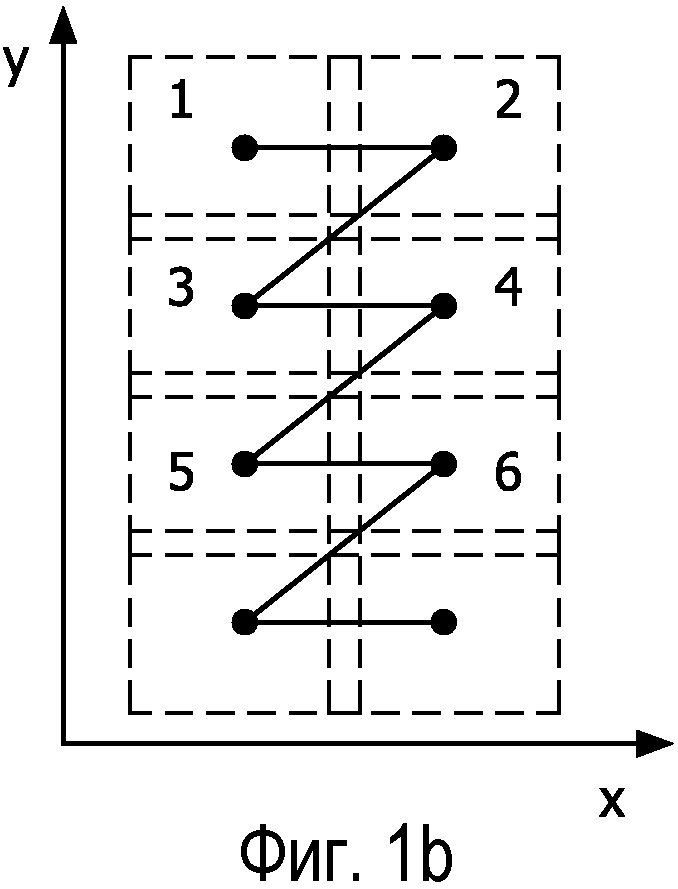
На Фиг.1 пример траекторий стола/опоры или траекторий перемещения обследуемого объекта приведены для многостационной технологии
Фиг.2 показывает многостанционную технологию, когда опора перемещается на одну станцию одномерно;
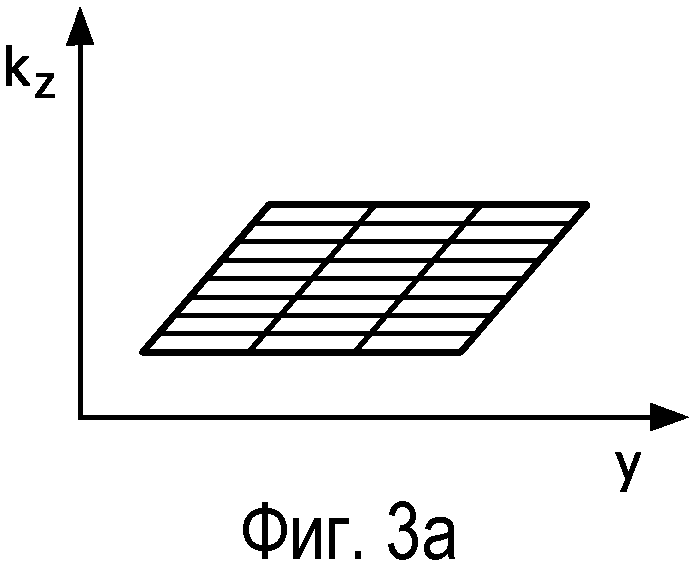
Фиг.3a и 3b иллюстрируют то, как прием данных осуществляется в гибридном пространстве (1);
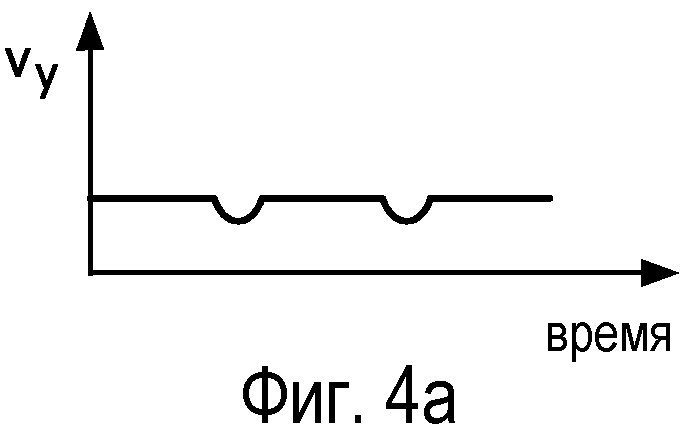
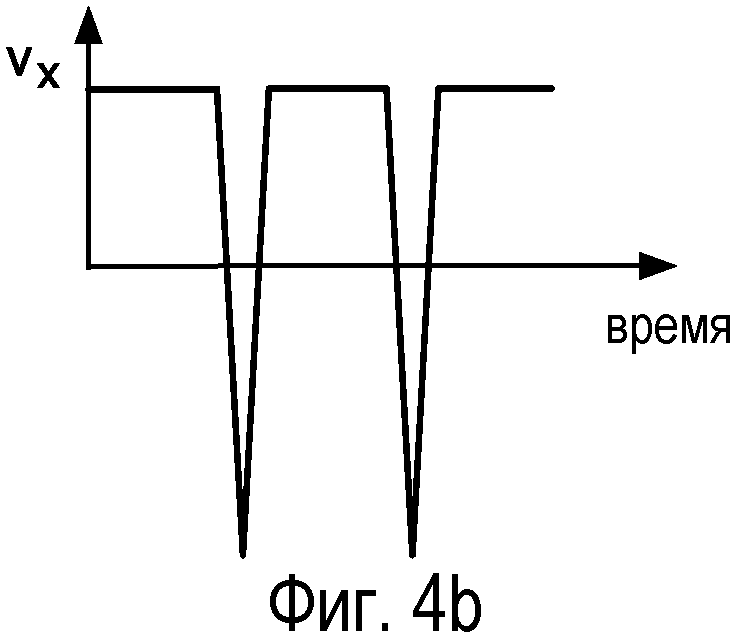
Фиг.4 (a,b) иллюстрирует скорость стола, соответственно, в направлении y и x;
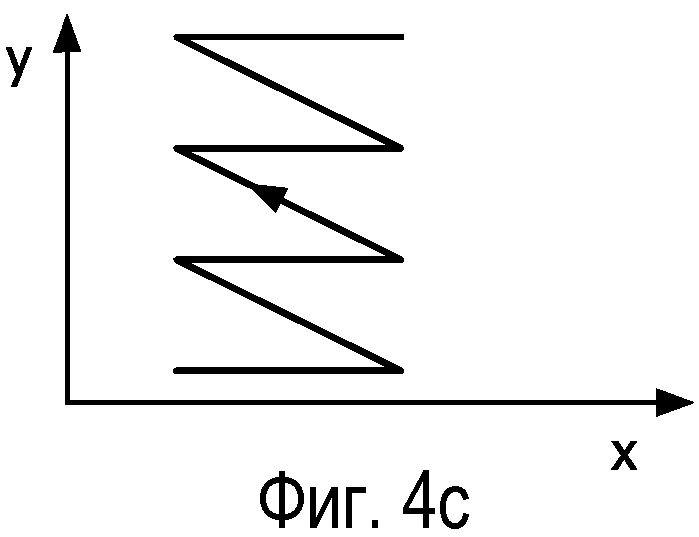
Фиг.4 (c) иллюстрирует пространственную траекторию приема данных синхронизации диаграммы, которая достаточно плотно охватывает оба направления движения, с учетом цельного заполнения трехмерного гибридного пространства;
Фиг.4 (d) показывает y-kx- представление гибридного пространства пространственной траектории приема сигналов согласно Фиг.4c;
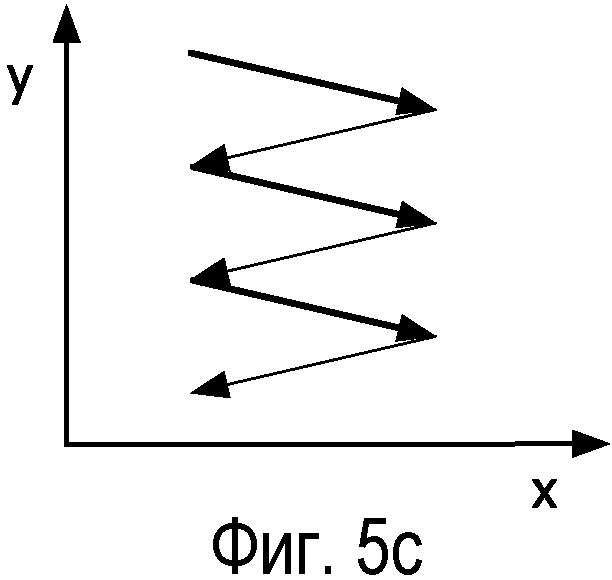
Фиг.5 a-c показывают другие пространственные траектории приема сигналов;
Фиг.5 (d) показывает y-kx- представление гибридного пространства пространственной траектории приема сигналов согласно Фиг.5c;
Фиг.6 схематически показывает субдискретизацию гибридного пространства в kx-направлении;
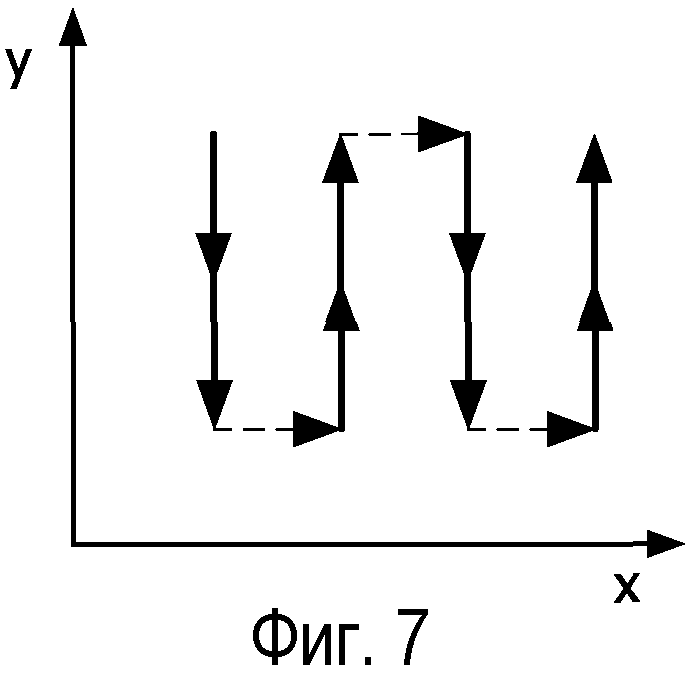
Фиг.7 показывает последовательность во времени интервалов перемещения стола для извилистой траектории;
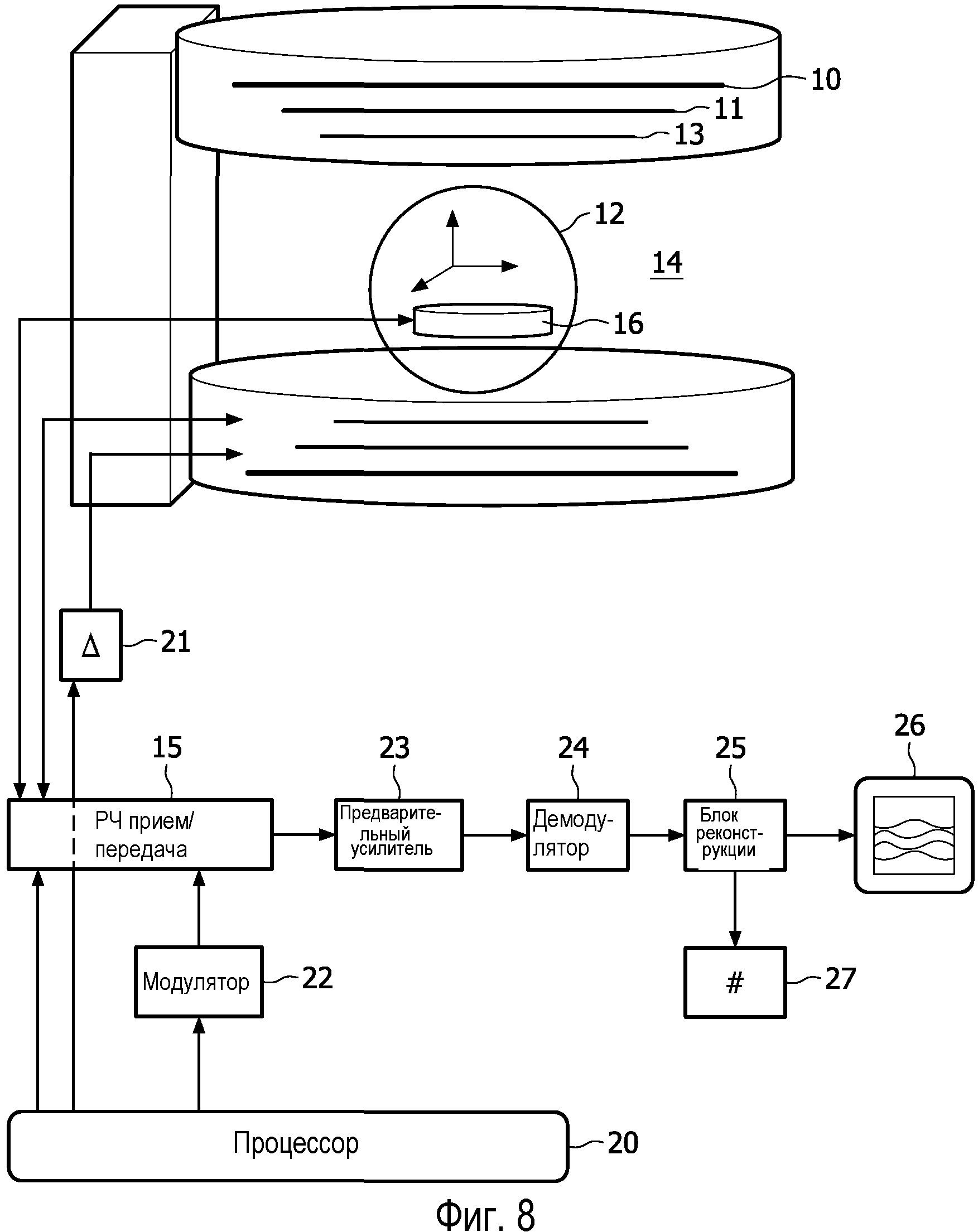
Фиг.8 показывает в виде диаграммы систему магниторезонансной томографии, в которой использовано настоящее изобретение.
Подробное описание вариантов воплощения
Фиг.8 показывает в виде диаграммы систему магниторезонансной томографии, в которой использовано изобретение. Система магниторезонансной томографии включает в себя комплект главных катушек 10, вследствие чего генерируется стабильное, однородное (основное) магнитное поле. Основные катушки конструируют, например, таким образом, чтобы они образовывали два полюсных наконечника, между которыми основные катушки генерируют основное магнитное поле. В такой системе магниторезонансного обследования открытого типа основное магнитное поле обычно действует в вертикальном (z) направлении. Исследуемое пространство 14 расположено между двумя полюсными наконечниками. Обследуемого пациента помещают на опору для пациента (не показана), которая скользит в пространство для исследований. Вокруг изоцентра магнитной системы, т.е., внутри объема 12 для формирования изображения, возникает наилучшая пространственная однородность основного магнитного поля и магнитные поля с очень точным магнитным градиентом. Таким образом, в однородном объеме магниторезонансные изображения принимаются с очень низким уровнем визуальных искажений. Система магниторезонансной томографии также включает в себя множество градиентных катушек 11, вследствие чего магнитные поля, демонстрирующие изменения в пространстве, в частности, в форме градиентов по времени в отдельных направлениях (x, y и z), генерируются таким образом, что они накладываются на однородное магнитное поле. Градиентные катушки 11 соединяют со средством 21 управления градиентом, который включает в себя один или несколько градиентных усилителей и блок управляемого источника питания. Градиентные катушки 11 снабжают электроэнергией путем приложения электрического тока посредством блока 21 электропитания; с этой целью, блок электропитания снабжают электронной цепью градиентного усиления, которая подает электрический ток на градиентные катушки для гененирования градиентных импульсов (также называемых «градиентными формами колебаний») соответствующей формы. Силу, направление и продолжительность градиентов регулируют путем управления блоком электропитания. Система магниторезонансной томографии также включает в себя передающие и приемные катушки 13, 16, соответственно, для генерирования импульсов высокочастотного возбуждения и для считывания магниторезонансных сигналов. Является предпочтительным, чтобы передающая катушка 13 была сконструирована в виде катушки 13 для тела, радиочастотное поле которой, возбуждающее позвонки, распространяется по однородному объему и большой части пространства для обследования. В режиме приема, катушка для тела имеет сенситивный объем, который простирается в крупную зону, находящуюся в исследуемом пространстве, и включает в себя зону 12 формирования изображения. Катушку для тела обычно устанавливают в системе магниторезонансной томографии таким образом, чтобы обследуемого пациента, помещенного на опору (не показана) в обследуемом пространстве, можно было бы перемещать в направлениях (x,y), перпендикулярных направлению основного поля, т.е., обычно в горизонтальной плоскости. Таким образом, соответствующие части обследуемого пациента можно перемещать в зону формирования изображения. Катушка 13 для тела действует как передающая антенна для передачи импульсов высокочастотного возбуждения и импульсов высокочастотного рефокусирования. Является предпочтительным, чтобы катушка 13 для тела вызывала пространственно однородное распределение интенсивности передаваемых высокочастотных импульсов (RFS). Ту же катушку или антенну обычно используют поочередно в качестве передающей катушки и приемной катушки. Кроме того, передающая и приемная катушка обычно имеет форму плоской катушки, но также допустимы и другие геометрические формы, где передающая и приемная катушка действует как передающая и приемная антенна для радиочастотных электромагнитных сигналов. Передающую и приемную катушку 13 соединяют с электронной цепью 15 приема и передачи.
Следует отметить, что в качестве альтернативы можно использовать раздельно приемные и/или передающие катушки 16. Например, в качестве приемных и/или передающих катушек можно использовать поверхностные катушки 16. Такие поверхностные катушки обладают высокой чувствительностью в сравнительно небольшом объеме. Приемные катушки, такие как поверхностные катушки, соединяют с демодулятором 24, и полученные магниторезонансные сигналы (MS) демодулируют посредством демодулятора 24. Приемную катушку соединяют с предварительным усилителем 23. Предварительный усилитель 23 усиливает радиочастотный резонансный сигнал (MS), принятый приемной катушкой 16, а усиленный радиочастотный резонансный сигнал подают на демодулятор 24. Демодулятор 24 демодулирует усиленный радиочастотный резонансный сигнал. Демодулированный резонансный сигнал содержит фактическую информацию, относящуюся к локальным концентрациям спинов в части отображаемого объекта. Демодулированные магниторезонансные сигналы (DMS) подают в блок реконструкции. Кроме того, цепь 15 передачи и приема соединяют с модулятором 22. Модулятор 22 и цепь 15 передачи и приема активируют передающую катушку 13 для передачи импульсов высокочастотного возбуждения и рефокусирования. В частности, поверхностные приемные катушки 16 соединяют с цепью передачи и приема посредством беспроводной линии связи. Данные магниторезонансного сигнала, полученные поверхностными катушками 16, передаются на цепь 15 передачи и приема, а управляющие сигналы (например, сигналы на настройку и расстройку поверхностных катушек) подают на поверхностные катушки по беспроводной линии связи.
Блок реконструкции извлекает один или несколько сигналов изображения из демодулированных магниторезонансных сигналов (DMS), и данные сигналы изображения отображают информацию об изображении отображаемой части обследуемого объекта. Блок 25 реконструкции на практике сконструирован, преимущественно, в виде блока 25 цифровой обработки изображений, который запрограммирован на извлечение сигналов изображения из демодулированных магниторезонансных сигналов, и эти сигналы изображения отображают информацию об изображении части изображаемого объекта. Сигнал на выходе из блока 25 реконструкции подают на монитор 26, вследствие чего монитор может отображать магниторезонансное изображение. В качестве альтернативы, при ожидании дальнейшей обработки, можно сохранять сигнал из блока 25 реконструкции в буферном блоке 27.
Система магниторезонансной томографии согласно изобретению также снабжена блоком 20 управления, например, в форме компьютера, который включает в себя (микро)процессор. Блок 20 управления управляет осуществлением высокочастотного возбуждения, а также применением временных градиентных полей. С этой целью, компьютерную программу согласно изобретению загружают, например, в блок 20 управления и блок 25 реконструкции.
Система магниторезонансного обследования согласно изобретению может функционировать в различных режимах, что будет теперь описано более подробно.
Двумерная многостанционная технология
Это простое распространение используемой в настоящее время технологии, относящейся к одномерно простирающейся зоне обзора на два направления (осевое и поперечное) движения. Стандартное формирование 2D/3D-изображения осуществляет, когда стол находится в состоянии покоя. Используется подбор пластины и, если необходимо, местное подавление сигнала, достигаемое путем создания вектора намагниченности, направленного перпендикулярно направлению скольжения и кодирования частоты. В данном примере, кодирование частоты применяют в направлении y, а выбор пластины - в направлени x. Предполагается, что размеры объекта превышают зону обзора изображения согласно действующей технологии дискретизации. Поэтому, супердискретизация осуществляется в обоих направлениях. Двумерное приближение представляет собой продвижение вперед в направлении кодирования частоты, и оно повышает эффективность фильтров защиты от наложения спектров. В направлении выбора пластины, приходится осуществлять несколько этапов измерения фазового кодирования, для компенсации искажений, вызванных процессом выбора пластины. Следовательно, эффективная зона обзора такого элементарного получения изображения слегка меньше номинальной, что приходится учитывать при проектировании технологической последовательности.
Для охвата расширенной зоны обзора такой многостанционной технологией приема сигнала, рассматриваются различные двумерные траектории перемещения стола. На Фиг.1 приведены примеры этих траекторий. При перемещении стола с пациентом, сканирование прерывается. Стол начинает перемещаться после завершения приема каждого комплекта субданных. Это перемещение необходимо выполнять эффективно, и оно должно легко переноситься пациентом. Впоследствии реконструируют отдельные комплекты субданных. Важное значение имеет процесс комбинирования изображений, который включает в себя некоторое слияние изображений в двумерном пространстве. Для этой цели выполняют реконструкцию изображения для более широкой зоны обзора (и матрицы изображений), которая обеспечивается супердискретизацией сигналов.
Двухмерное изображение объединенной многостанционной системы/непрерывно движущегося стола
Обширное пространственное покрытие в двух пространственных измерениях можно получать путем соединения одномерной многостанционной системы с любой технологией одномерно непрерывно движущегося стола (COMTI). Результатом является технология многостанционного сканирования, охватывающего объект, например, вдоль направления x, тогда как в каждой станции осуществляется одномерная дискретизация непрерывно движущегося стола, охватывающая объект по расширенной зоне обзора в направлении y. На Фиг.2 такая схема приема сигналов показана схематически. Для схемы непрерывно перемещающегося стола такая схема называется схемой Крюгера-Ридерера (К/R), с помощью которой осуществляется кодирование частоты в направлении движения стола, а также может быть использована схема поперечного кодирования (Mobi-X), при которой кодирование частоты осуществляется перпендикулярно направлению движения, или любая другая технология. Сканирование COMTI должно охватывать область в направлении x, что соответствует ширине шага многостанционной схемы. Поэтому, в этих экспериментах зоны обзора в соответствующих направлениях фазового кодирования приходится регулировать, чтобы убедиться в охвате всего чувствительного объема сканера, во избежание эффектов наложения в любой форме. Для этой цели можно использовать подавление избыточного местного сигнала, повышая эффективность и/или минимизируя эффективную зону обзора, подлежащую кодированию для сеансов сканирования COMTI.
Двумерное отображение непрерывно движущегося стола
Расширение виртуальной зоны обзора по двум пространственным измерениям также можно считать полностью основанным на технологии COMTI. В рассматриваемых схемах COMTI прием данных происходит в гибридном пространстве [1], которое в случае одномерного COMTI содержит одно пространственное измерение (в направлении движения) и оставшиеся измерения каонного пространства. Из-за движения стола, это пространство смещается в сторону направления движения стола. Смещение возникает вследствие того, что все данные в основном принимаются в области изоцентра, - наиболее однородной области сканера. Однако, из-за движения стола, профили, измеренные в нем, относятся к различным положениям объекта. Смещение приводит к проблеме, связанной с небольшой потерей данных в начале и в конце приема группы данных гибридного пространства. Это происходит, невзирая на то, что частотное или фазовое кодирование применяют в направлении движения (1, 2), как проиллюстрировано на Фиг.3.
В магнитно-резонасной томографии в декартовой системе координат существует только одно направление частотного кодирования. По всем оставшимся направлениям применяется фазовое кодирование. Обычно, эти ориентации в ходе приема изображений не изменяются. Теперь можно исследовать движение стола в двух направлениях. Ограничимся на время дискретизацией в декартовой системе координат, где можно различить два случая:
(A) два направления движения стола совпадают с направлением частотного или фазового кодирования, или
(B) оба совпадают с двумя направлениями фазового кодирования.
Сначала рассмотрим случай (A).
Обобщенная технология Mobi-X или Крюгера-Ридерера (A)
Предполагается, что направления движения стола для пациента должны быть перпендикулярны друг другу. Допустим, y - это направление частотного кодирования, а x - первое направление фазового кодирования. Рассмотрим трехмерную дискретизацию сигнала, где третьим измерением на данный момент можно пренебречь. Если происходит движение стола одновременно по двум направлениям (x, y), схему Mobi-X или Крюгера-Ридерера можно применять в комбинированном виде в обобщенной форме. Это значит, что в ходе стандартного приема данных К/R, при наличии направления частотного кодирования, ориентированного вдоль оси y, прием данных по схеме Mobi-X происходит во внутреннем контуре. Таким образом, можно считать, что прием данных по схеме Mobi-X проходит почти независимо от схемы К/R, точно также, как специальный режим фазового кодирования согласно стандартной технологии Крюгера-Ридерера. Следовательно, направление фазового кодирования в схеме К/R содержит все этапы фазового кодирования во втором направлении движения в соответствии с полным кодированием в цикле Mobi-X (включающем в себя потенциальную супердискретизацию). Отслеживание пластин осуществляют, как обычно для схемы Mobi-X, вдоль направления движения, ориентированного вдоль оси x. Представление данных можно сделать в трехмерном гибридном пространстве, которое сдвигается в двух направлениях. На Фиг.3 показаны два вида трехмерной гибридной группе данных, принимаемых в данном эксперименте.
Выполнение сканирования согласно такой схеме позволяет установить некоторые ограничения, накладываемые на скорости и характер перемещения стола. В действующем сценарии стол движется в x-направлении быстрее, чем в y-направлении. Скорость vx можно получить по формуле [2] как
[1]
Lx означает толщину возбужденной пластины, dx - x-измерение в пикселях, Ny и Nz - количество этапов фазового кодирования, применяемого в этих направлениях для дискретизации данных для одной элементарной зоны обзора (FOV). Следует принять к сведению, что количество этапов фазового кодирования включает в себя этапы, необходимые для компенсации проблем, связанных с возбуждением обработки пластин, и что количество этапов полного фазового кодирования, необходимого для охвата желаемой виртуальной зоны обзора FOV=Lx fx в направлении x, увеличивается на коэффициент fx.
Скорость движения стола в направлении y, следовательно, выводят из общего количества этапов фазового кодирования, необходимых для приема данных для одиночной элементарной зоны обзора в направлении y:
[2]
Индекс y указывает на значения, зависящие от направления. Для такой схемы приема можно привести логическую диаграмму движения стола (см. Фиг.4). Фиг.4 (a, b) показывает скорость движения стола, соответственно, по направлению y и x. Фиг.4 (c) показывает пространственную траекторию этой синхронизирующей диаграммы, которая достаточно плотно охватывает два измерения движения, с учетом цельного заполнения трехмерного гибридного пространства. Напротив, Фиг.4 (d) иллюстрирует представление y- kx гибридного пространства для части К/R, показывая схему приема Mobi-X лишь как общее количество выполняемых этапов фазового кодирования. После выполнения цикла приема данных по схеме Mobi-X, стол очень быстро откатывается назад к исходной позиции x для начала нового прогона. Небольшими периодами времени, необходимыми для достижения этого отката назад, в уравнении [1,2] пренебрегают. Эта технология нуждается в периодическом откате стола назад, что может привести к некоторому дискомфорту пациента и потере эффективности дискретизации.
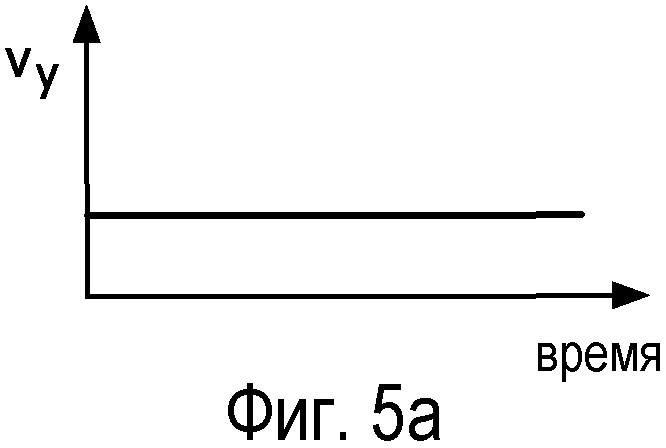
Также возможны траектории пространственной дискретизации, отличные от заданных на Фиг.4 (c). Такая схема проиллюстрирована на Фиг.5 (a-d). Вместо осуществления полного откатывания назад после завершения приема данных по схеме Mobi-X, у скорости стола vx можно просто поменять направление (см. Фиг.5 (b)), в результате чего стол медленно приезжает назад в исходную x-позицию, тогда как прием данных продолжается. В случае, показанном на Фиг.5, значение vy уменьшено наполовину по отношению к своему номинальному значению, выведенному из уравнения [1]. Соответствующее представление y- kx гибридного пространства показано на Фиг.5 (d). Важно отметить, что в этой схеме гибридное пространство дискретизируется дважды, что соответствует некоторого рода усреднению сигнала. По существу, это гибридное пространство содержит два подпространства, - подпространство с обратной и прямой дискретизацией. Такой подход к сканированию может быть неэффективным с точки зрения дискретизации. Более подходящая технология включает в себя субдискретизацию гибридного пространства в направлении kx, и оно схематически продемонстрировано на Фиг.6 (a). Оно сопровождается потерями в эффективности, из-за уполовиненной скорости стола vy, что может уравновешивать восстановление эффективности сканирования. Однако, реконструкция этих данных может стать более сложной в реальных условиях. Две группы данных с прямой и обратной дискретизацией можно до некоторой степени реконструировать по отдельности друг от друга, а комбинирование данных можно осуществить в пространственной области, включая некоторую фазовую коррекцию нулевого и первого порядка. Однако, основной проблемой в этом способе реконструкции является проблема свертывания в направлении x. Эту проблему можно избежать путем обработки Mobi-X-данных в качестве одиночной группы данных. В этом случае необходимо хронометрирование или точная информация о положении стола, для предотвращения любых искажений, вызванных объединением двух субдискретизированных групп данных в направлении kx.
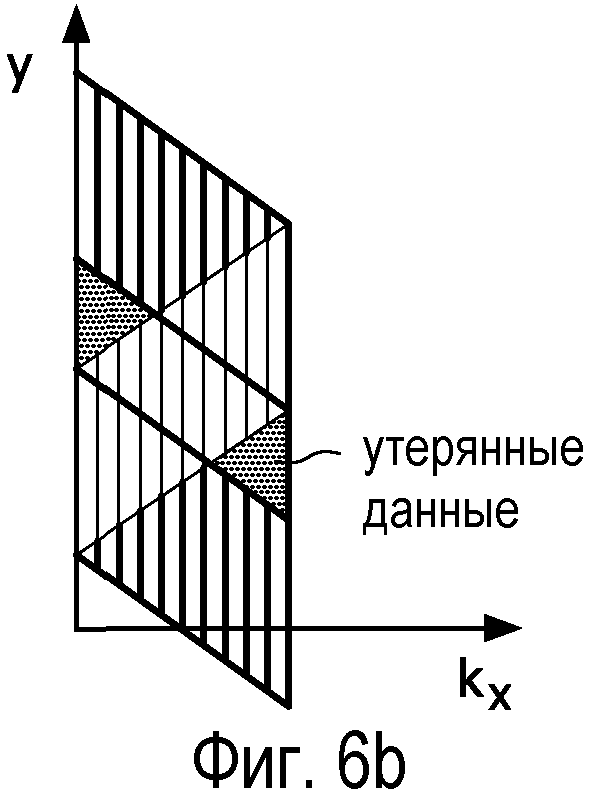
Также можно рассмотреть и другие схемы дискретизации. Их можно осуществлять без попыток субдискретизации для уравновешивания потерь эффективности сканирования, путем использования различных соотношений .
Фиг.6(b) иллюстрирует такой случай. Существуют области в гибридном пространстве, которые покрываются дважды, и те, которые не покрываются вообще. Избыточную информацию можно использовать для получения некоторых коррекций между прямой и обратной группой данных, что может быть полезным для повышения качества изображения. С другой стороны, зазоры в гибридном пространстве могут быть в некоторых случаях заполнены путем соответствующей реконструкции изображения в соответствии с половиной преобразования Фурье или реконструкции изображения другого типа.
Случай (B) может быть рассмотрен аналогичным образом.
Обобщенная технология Mobi-X (B)
В этом случае в основном следует рассматривать две гнездовые Mobi-X-схемы, тогда как кодирование частоты осуществляется вдоль третьего измерения. В принципе, поддерживается та же аргументация, что приведена выше, с той разницей, что на фигурах, используемых ранее, пространственную координату y следует переместить на ky. Оставшаяся проблема состоит в том, что схема Mobi-X нуждается в выборе пластины в направлении движения, которое отслеживают в ходе продвижения сканера (2). Однако, при градиентных приемах данных по типу эха приемлемым является только селекторный импульс (SE). В данном случае SE-прием отсутствует, но градиентные приемы часто бывают ограничены условиями приема-передачи (TR). Для преодоления этих ограничений для градиентного эхо-сканирования, при таком эхо-сценарии приготовления турбулентной области путем намагничивания, можно использовать местное подавление намагниченности (REST) для подавления намагниченности, возникающей за пределами второго направления выбора пластины.
Однако, применимость такой схемы может быть ограничена. Основной вопрос состоит в том, будет ли эффективно считывание в направлении z для пространственного измерения и разрешения, желательного в этом направлении. Кодирование частоты - это наиболее эффективная технология кодирования, и ее следует применять в направлении, для которого имеются максимальные требования с точки зрения численного разрешения.
Оставшийся случай (C) следует рассмотреть очень кратко в дальнейшем.
Обобщенная технология Крюгера-Ридерера (C)
Основная идея этой двумерной технологии движущегося стола состоит во встраивании двух приемов данных согласно схеме Крюгера-Ридерера. В технологии К/R кодирование частоты применяют вдоль направления движения. Как уже указывалось, в эксперименте с магниторезонансной томографией существует только одно приемлемое направление кодирования частоты. Следовательно, движение стола в этой технологии следует осуществлять последовательно для двух направлений. Переключение скорости движения стола между vy и Vx, таким образом, связано с переключением направления частотного кодирования. Гибридное пространство для этого рода приема сигналов обладает некоторой мозаичной структурой. Соответствующее псевдогибридное пространство может демонстрировать некоторые зазоры и избыточное покрытие, что делает эту технологию потенциально не очень выгодной. Точно также, пример Фиг.7 иллюстрирует последовательность во времени для интервалов перемещения стола для извилистой траектории. Также, в этих экспериментах зону обзора в направлениях фазового кодирования следует отрегулировать, чтобы покрыть весь чувствительный объем сканера для предотвращения любых форм свертывания сигналов. Подавление местного сигнала может помочь минимизировать кодируемую эффективную зону обзора.
Изобретение обладает практическими преимуществами при обследовании живота пациента, где номинальный размер зоны обзора (для индивидуальной позиции опоры) ограничен 500 мм. Настоящее изобретение легко позволяет расширять виртуальную зону обзора до 800 мм в направлении подача - головка, и до 600 м в направлении лево - право.
Ссылки
1. Kruger DG, Riederer SJ, Grimm RC, Rossman PJ. Magn Reson Med 2002; 47: 224-231.
2. Aldefeld B, Bόrnert P, Keupp J. Magn Reson Med 2006; 55: 1210-16.
Реферат
Использование: для магниторезонансного обследования объектов. Сущность: заключается в том, что принимают множество групп магниторезонансных сигналов от объекта для различных положений опоры в двумерной области, причем по меньшей мере первое из положений и второе из положений смещены относительно друг друга в первом направлении, и причем по меньшей мере первое из положений и третье из положений смещены относительно друг друга во втором направлении, ортогональном первому направлению. Технический результат: обеспечение возможности высокого качества изображения крупного объекта. 3 н. и 7 з.п. ф-лы, 17 ил.
Формула
- систему приема, выполненную с возможностью приема магниторезонансных сигналов;
- передвижную опору, выполненную с возможностью поддержания обследуемого объекта; и
- контроллер, выполненный с возможностью управления системой приема и опорой, а также с возможностью
перемещения опоры в направлении непрерывного движения в двумерной области;
смещения опоры в направлении, перпендикулярном направлению непрерывного движения к соответствующим боковым положениям; и
приема, для соответствующих боковых положений, группы магниторезонансных сигналов в ходе непрерывного движения опоры в направлении непрерывного движения.
принимают множество групп магниторезонансных сигналов от объекта для различных положений опоры в двумерной области, причем по меньшей мере первое из положений и второе из положений смещены относительно друг друга в первом направлении, и причем по меньшей мере первое из положений и третье из положений смещены относительно друг друга во втором направлении, ортогональном первому направлению.
принимают первую совокупность групп магниторезонансных сигналов при непрерывном перемещении опоры в первом направлении,
смещают опору во втором направлении после приема первой совокупности групп магниторезонансных сигналов, и
после смещения опоры во втором направлении, принимают вторую совокупность наборов магниторезонансных сигналов при непрерывном перемещении опоры в первом направлении.
(a) принимают первую из групп магниторезонансных сигналов, когда опора находится в первом положении,
(b) смещают опору в первом направлении во второе положение и затем принимают другую группу магниторезонансных сигналов во втором положении,
(c) смещают опору во втором направлении и затем принимают другую группу магниторезонансных сигналов во втором положении, и
повторяют этапы (b) и (c) до приема магниторезонансных сигналов из всей визуализируемой области объекта.
(a) принимать набор магниторезонансных сигналов от обследуемого объекта при поддержании объекта опорой;
(b) перемещать опору в первом направлении в двумерной области и затем принимать другую группу магниторезонансных сигналов от объекта;
(c) перемещать опору во втором направлении в двумерной области и затем принимать следующую группу магниторезонансных сигналов от объекта, причем второе направление ортогонально первому направлению, и
повторять этапы (b) и (c) до приема магниторезонансных сигналов из всей визуализируемой области объекта.
Комментарии