Передача и привод вспомогательных агрегатов с постоянной скоростью - RU2315216C1
Код документа: RU2315216C1
Чертежи












Описание
Область техники, к которой относится изобретение
Изобретение относится к передаче и к использующему ее приводу вспомогательных агрегатов с постоянной скоростью, и более конкретно - к планетарной шаровой передаче с плавным регулированием передаточного числа, имеющей множество планетарных элементов, находящихся в контакте качения с внутренней и наружной дорожкой качения, и привод вспомогательных агрегатов со стабилизированной скоростью с ременным приводом, предназначенный для приведения в действие вспомогательных агрегатов двигателя с по существу постоянной скоростью.
Предпосылки к созданию изобретения
Двигатели транспортных средств обычно содержат некоторые вспомогательные агрегаты, которые используются в процессе эксплуатации двигателя и транспортного средства. Такие вспомогательные агрегаты могут включать в себя насос усилителя рулевого механизма, компрессор кондиционера, генератор переменного тока, масляный насос, топливный насос и т.д. Привод этих вспомогательных механизмов обычно осуществляется поликлиновым ремнем. Поликлиновый ремень взаимодействует со шкивом на каждом вспомогательном механизме, а также с коленчатым валом двигателя. Коленчатый вал двигателя обеспечивает крутящий момент для привода вспомогательных механизмов.
При движении ремня под воздействием коленчатого вала он с необходимостью подвергается воздействию изменений частоты вращения двигателя при ускорении или замедлении транспортного средства. Иными словами, рабочая частота вращения вспомогательных агрегатов прямо пропорциональна частоте вращения двигателя. Изменения частоты вращения двигателя ведут к неэффективной работе вспомогательных агрегатов, поскольку каждый агрегат должен быть рассчитан на удовлетворительную работу при всем диапазоне частот вращения двигателя. Это обязательно подразумевает, что при большей части диапазона частот вращения двигателя эффективность оказывается ниже оптимальной. Поэтому желательно разъединить вспомогательные агрегаты с коленчатым валом таким образом, чтобы они могли приводиться в действие с оптимальной, постоянной скоростью.
Типичным для этой области техники является патент США № 4969857, выданный Кумму (1990), в котором описан привод вспомогательных агрегатов с переменной скоростью, имеющий плоский ремень, вращающий шкив переменного диаметра, и в котором шкив постоянного диаметра, прикрепленный к шкиву переменного диаметра, используется для приведения в действие другого ремня, соединенного со вспомогательными агрегатами.
Также типичным для этой области техники является патент США № 4305488, выданный Макинтошу (1981 г), в котором описан узел привода вспомогательных агрегатов транспортного средства, который включает в себя повышающую планетарную передачу, установленную с приводимым в действие двигателем вводом водила.
Кумм предлагает особенно сложное решение проблемы, требующее множества деталей для шкива бесступенчато-регулируемой передачи, которые должны действовать согласованно для получения нужных результатов работы. Кроме того, Кумм не предусматривает применения многореберного ремня, который преимущественно используется в приводах вспомогательных агрегатов.
Простая планетарная шаровая бесступенчато-регулируемая передача желательна для уменьшения возможной частоты отказов в системе привода вспомогательных агрегатов, а также для повышения долговечности.
Типичным для этой области техники является патент США №6461268, выданный Миленру (2002 г), в котором описана бесступенчато-регулируемая передача типа, имеющая планетарные элементы, находящиеся в контакте качения с радиально внутренней и наружной дорожками качения, каждая из которых состоит из двух аксиально разнесенных деталей со средством управления для избирательного варьирования аксиального разделения двух деталей одной дорожки качения.
Требуется привод вспомогательных агрегатов с постоянной скоростью, который с помощью ременной передачи вращает вспомогательные агрегаты с по существу постоянной скоростью с использованием планетарной шаровой передачи с плавным регулированием передаточного числа, имеющей автоблокирующий привод. Настоящее изобретение отвечает этим требованиям.
Сущность изобретения
Главным объектом изобретения является предложение привода вспомогательных агрегатов с постоянной скоростью, который с помощью ременной передачи вращает вспомогательные агрегаты с по существу постоянной скоростью с использованием планетарной шаровой передачи с плавным регулированием передаточного числа, имеющей автоблокирующий привод.
Другие объекты изобретения будут указаны или станут очевидными из последующего описания изобретения и прилагаемых чертежей.
Изобретение содержит планетарную шаровую передачу с плавным регулированием передаточного числа, содержащую планетарные элементы, находящиеся в контакте качения с подвижными внутренней и наружной дорожками качения и систему привода вспомогательных агрегатов с постоянной скоростью, использующую эту передачу. Передача плавно регулирует передаточное число в пределах от приблизительно 0,3 до 1,0. Входной вал передачи соединяется с первичным двигателем, таким как коленчатый вал двигателя транспортного средства, приводным ремнем. Передача содержит по меньшей мере один выходной вал, соосный со входным валом. Ремень пропущен между выходным шкивом и различными вспомогательными агрегатами двигателя. Второй конец выходного вала двигателя может быть непосредственно соединен со вспомогательным агрегатом двигателя, установленным на передаче. Включенная в состав привода система управления воспринимает частоту вращения коленчатого вала. Процессор анализирует частоту вращения коленчатого вала и соответственно регулирует передаточное число с использованием шагового двигателя, соединенного с червячной передачей для поддержания постоянной частоты вращения на выходе вне зависимости от частоты вращения коленчатого вала.
Краткое описание чертежей
Прилагаемые чертежи, включенные в описание изобретения и образующие его часть, иллюстрируют предпочтительные варианты реализации настоящего изобретения и вместе с описанием служат для разъяснения принципов изобретения.
Фиг.1 - схематический вид системы привода вспомогательных агрегатов с постоянной скоростью;
Фиг.2 - поперечный разрез передачи;
Фиг.3 - в частичном разрезе дорожки качения, демонстрирующие максимальное передаточное число;
Фиг.4 - в частичном разрезе дорожки качения, демонстрирующие минимальное передаточное число;
Фиг.5 - в частичном разрезе дорожки качения;
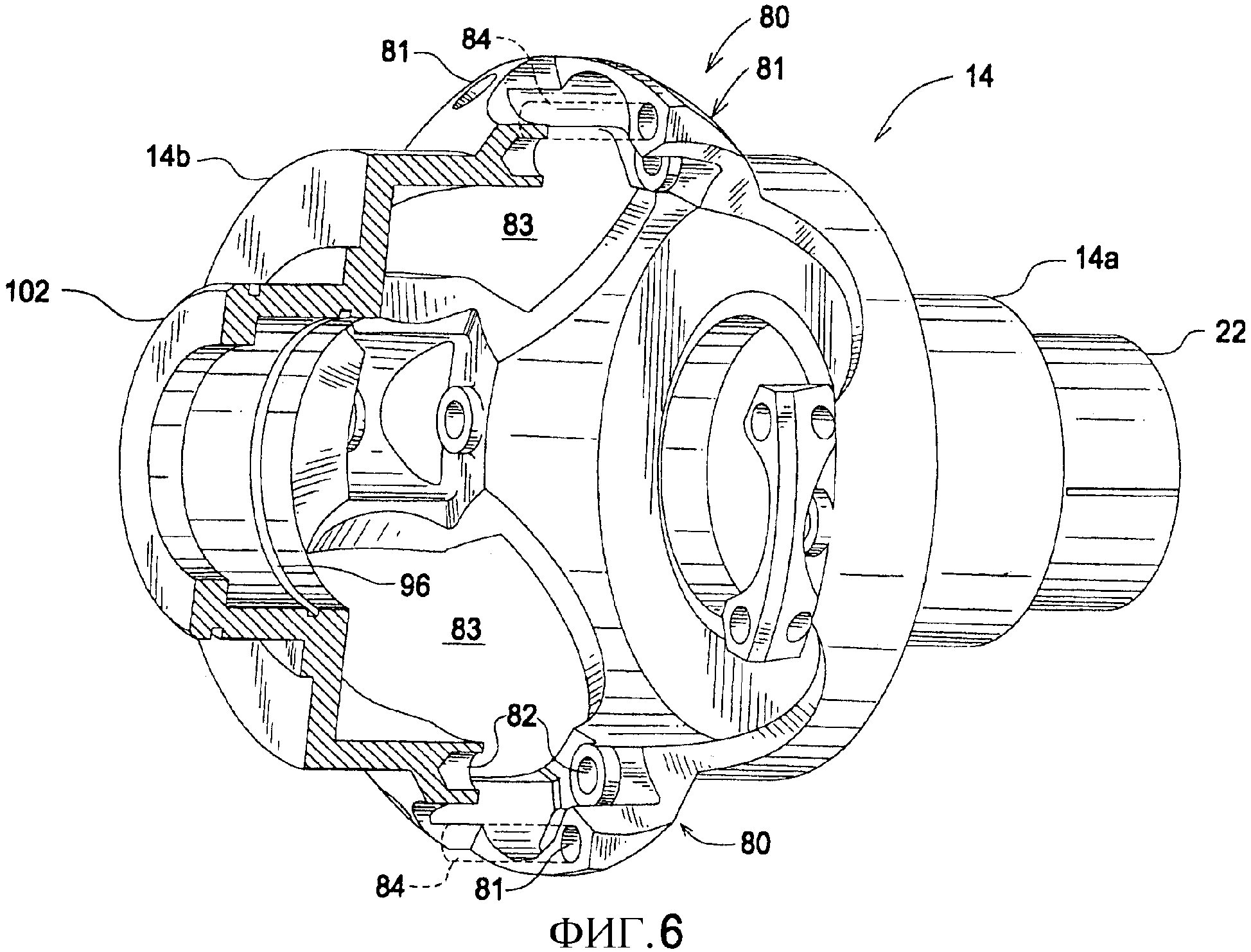
Фиг.6 - в частичном разрезе коробка передачи;
Фиг.7 - в частичном разрезе узел ведомого механизма;
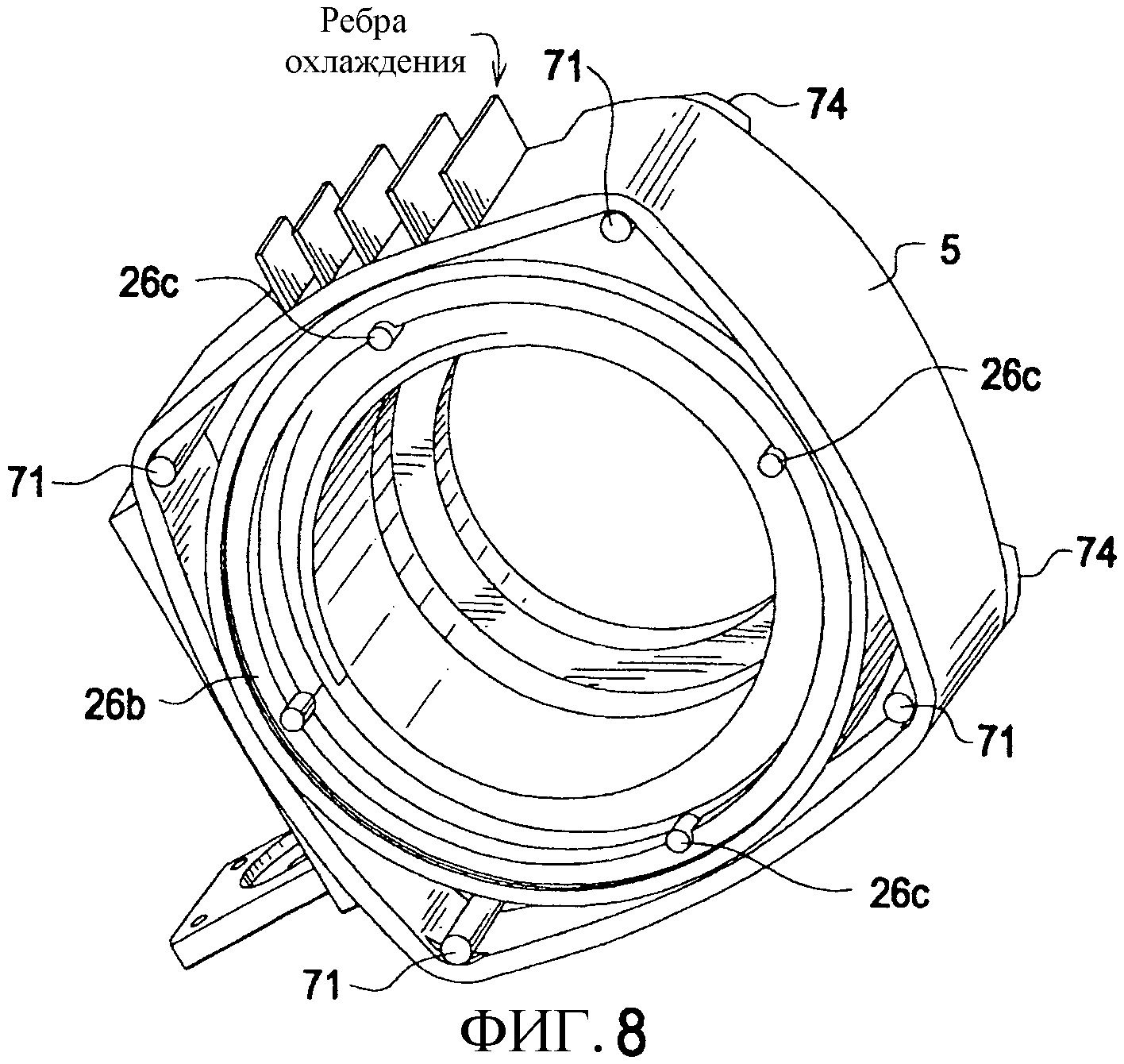
Фиг.8 - деталь корпуса и наружной дорожки качения;
Фиг.9 - деталь привода наружной дорожки качения;
Фиг.10 - вид передачи в поперечном разрезе;
Фиг.11 - перспективный вид сдвоенного варианта реализации;
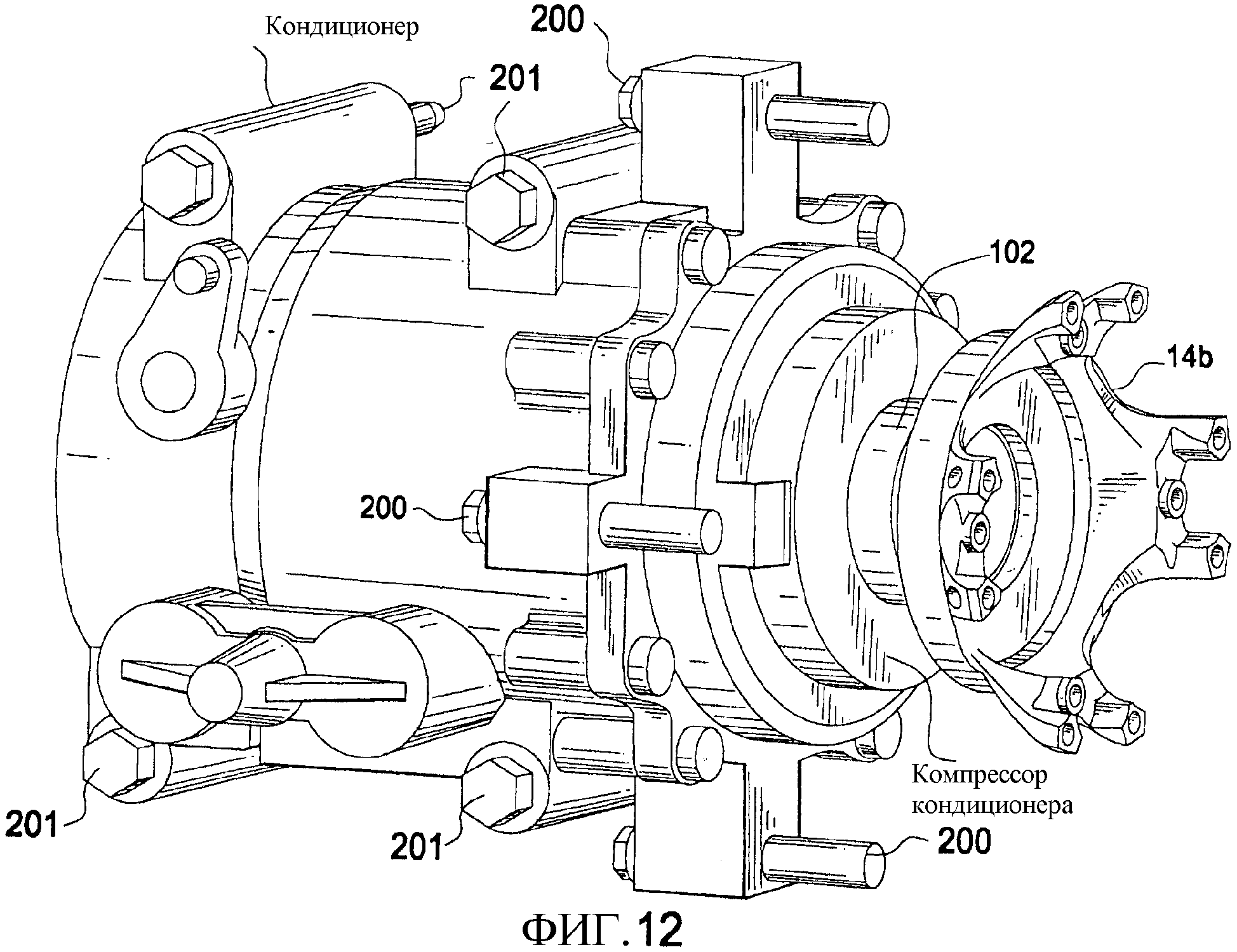
Фиг.12 - местный перспективный вид сдвоенного варианта реализации;
Фиг.13 - блок-схема системы управления;
Фиг.14 - графическое изображение работы усовершенствованного двигателя;
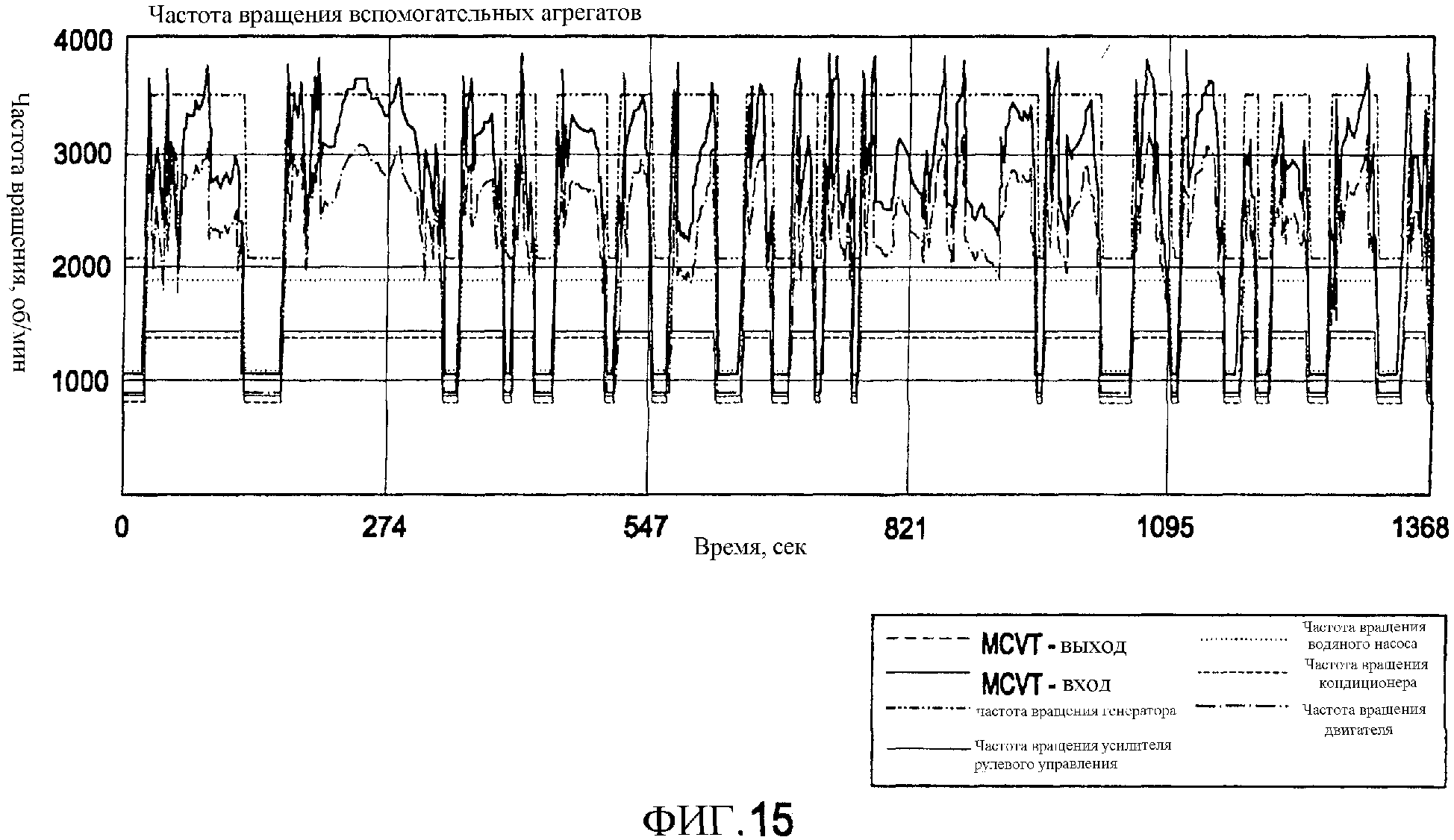
Фиг.15 - графическое изображение скорости вращения вспомогательных агрегатов по сравнению с частотой вращения коленчатого вала;
Фиг.16 - графическое изображение скорости вращения вспомогательных агрегатов по сравнению с частотой вращения коленчатого вала для существующих систем с пропорциональным приводом;
Фиг.17 - графическое изображение передаточных отношений для передачи;
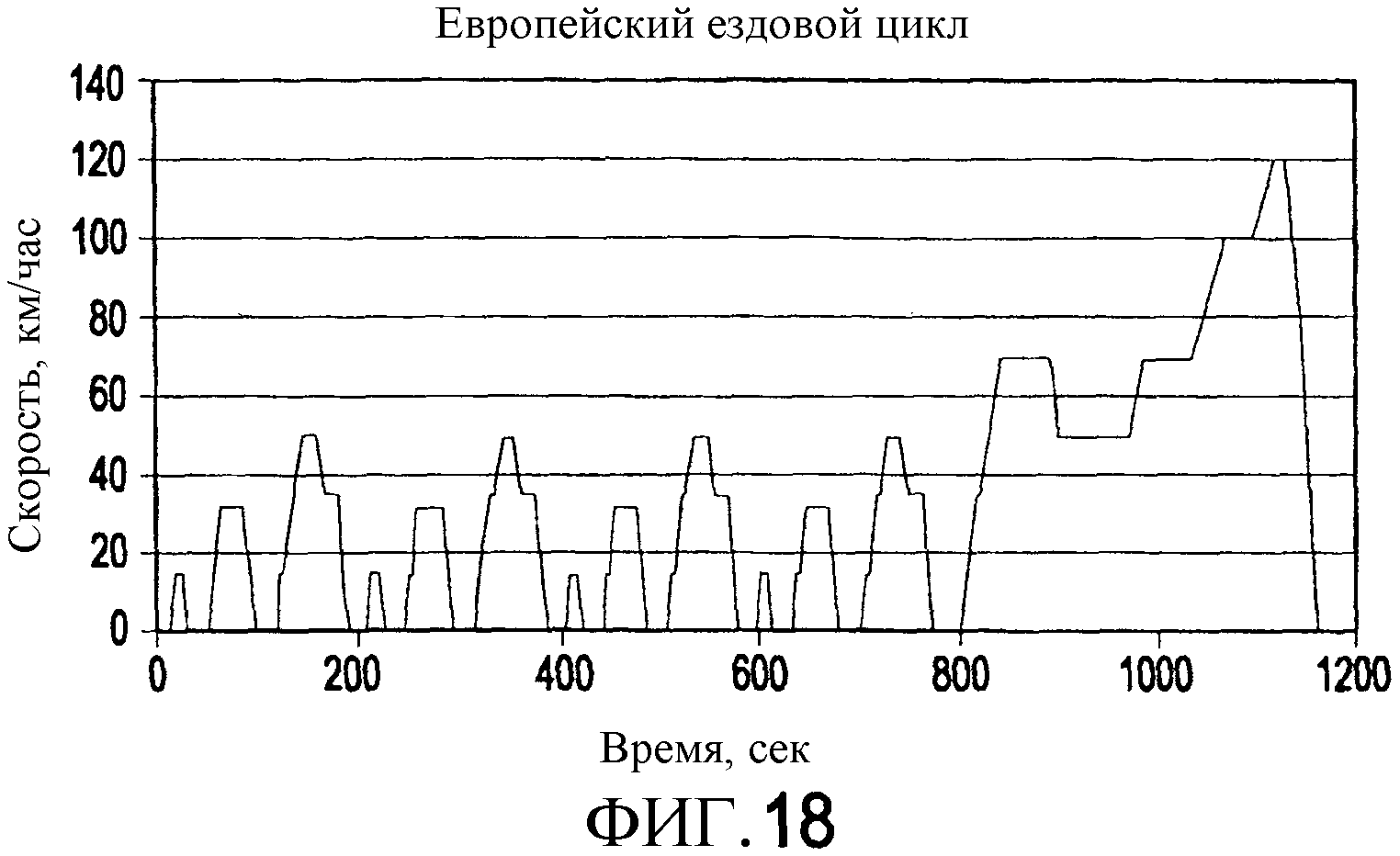
Фиг.18 - графическое изображение типичного европейского ездового цикла.
Подробное описание предпочтительного варианта реализации
Система, являющаяся предметом изобретения, содержит привод вспомогательных агрегатов с постоянной скоростью (CSAD), который значительно уменьшает паразитные потери энергии в ведомых вспомогательных агрегатах. Система позволяет значительно улучшить рабочие характеристики и управляемость транспортного средства, включая улучшение выходного крутящего момента транспортного средства и экономию топлива.
Система содержит передачу с плавным регулированием передаточного числа с планетарными элементами, которая используется в системе вспомогательных агрегатов двигателя с ременным приводом и позволяет использовать вспомогательные агрегаты двигателя с по существу постоянной частотой вращения, в то время как частота вращения двигателя и соответственно коленчатого вала, постоянно меняется. Путем поддержания ременного привода вспомогательного агрегата на минимальной частоте вращения, отвечающей всем требованиям транспортного средства, т.е. минимальной частоте вращения, при которой генератор вырабатывает ток нужной силы и при которой кондиционер обеспечивает нужное охлаждение, система значительно уменьшает крутящие нагрузки, которые вспомогательные агрегаты прикладывают к двигателю. Это позволяет увеличить крутящий момент на выходе, доступный для продвижения транспортного средства, или уменьшает величину газа (мощности), требующейся для поддержания постоянной скорости транспортного средства. Оптимальная ситуация достигается тогда, когда минимальная частота вращения ведомого вспомогательного агрегата меньше частоты вращения коленчатого вала с учетом различий в диаметре шкивов соответствующих вспомогательных агрегатов. Для иллюстрации преимуществ являющейся предметом изобретения системы CSAD в качестве показателей рабочих характеристик приняты ускорение транспортного средства и потребление горючего.
Общая компоновка системы привода вспомогательных агрегатов со стабилизированной скоростью показана на фиг.1. Ведущий шкив (А) соединен с первичным двигателем, таким как коленчатый вал двигателя внутреннего сгорания (IC) транспортного средства. Двигатель внутреннего сгорания не считается ограничением, поскольку система, являющаяся предметом настоящего изобретения, может использоваться в большинстве ситуаций, при которых требуется контролировать или изменять частоту вращения ведомого элемента относительно частоты вращения ведущего элемента.
Ведомый шкив (В) является входным шкивом 100 передачи с плавным регулированием 1000 описанного здесь типа. Первый бесконечный ремень В1 пропущен между шкивами (А) и (В), непосредственно соединяя таким образом ведущий шкив с ведомым шкивом в форме двухточечного привода. Частота вращения ведомого шкива (В) изменяется в прямой зависимости от изменения частоты вращения ведущего шкива (А). Ремень В1 может иметь любой профиль, известный в технике, включая многореберный, клиновой и зубчатый.
Передача 1000 осуществляет привод шкивов различных вспомогательных агрегатов посредством выходного шкива 101, который соединяется вторым бесконечным ремнем (В2) с ведомыми вспомогательными агрегатами, включающими (не ограничиваясь ими) генератор (ALT), водяной насос (WP) и насос усилителя рулевого механизма (PS). Другой вспомогательный агрегат, а именно компрессор кондиционера (АС), показан непосредственно связанным с передачей 1000 и, таким образом, с выходным валом передачи, как описано повсюду в данном описании. В альтернативной компоновке компрессор АС не требуется непосредственно соединять с передачей и он может располагаться в любом месте двигателя, будучи соединен ремнем В2, как и другие компоненты.
Описанная компоновка привода позволяет отделить коленчатый вал от ведомых вспомогательных агрегатов, позволяя варьировать частоту вращения вспомогательных агрегатов с помощью передачи независимо от частоты вращения коленчатого вала. Отделение таким образом вспомогательных агрегатов служит повышению эффективности вспомогательных агрегатов и двигателя.
Натяжное устройство Т для ремня используется для натяжения ремня В2 с целью облегчить передачу крутящего момента от выхода передачи на вспомогательные агрегаты. Натяжное устройство Т для ремня может также содержать демпфирование, включая асимметричное демпфирование, известное в технике.
Описанный здесь механизм передачи чрезвычайно компактен и высоко эффективен. Конструкция устраняет всякую необходимость в герметичном гидравлическом контуре, необходимом для смазки или для управления передачей.
Описание передачи с плавным регулированием передаточного числа
На фиг.2 показан поперечный разрез передачи и признаки обеспечивающего преимущество его сдвоенного выхода. Передача 1000 содержит устройство типа, известного в общем как бесступенчато-регулируемая передача (CVT). Передача содержит планетарные элементы, которые находятся в контакте качения с радиально внутренней и наружной дорожками качения. Каждая из дорожек качения содержит две аксиально разнесенные части или участка. Средства управления, реагирующие на частоту вращения двигателя, используются для избирательного варьирования аксиального разделения двух частей наружной дорожки качения и, таким образом, радиального положения планетарных шаровых элементов, находящихся в контакте качения с дорожками качения. Изменение радиального положения планетарных элементов изменяет передаточное число на выходе и соответственно частоту вращения выходного вала передачи.
Средство, чувствительное к крутящему моменту, приложенному ко входному элементу передачи, служит для определения компенсирующего изменения разделения двух частей внутренней дорожки качения и, таким образом, передаточного числа. Средство, чувствительное к крутящему моменту, варьирует также обмен усилиями между планетарными элементами и дорожками качения, направленными под прямым углом к поверхности раздела между ними (N). Передача описана более полно в патенте США №6461268, выданном Милнеру, который полностью включен сюда в качестве ссылки.
Передача, изображенная на фиг.2, которую иногда называют также вариатором или плавно регулируемой передачей, содержит корпус 5, в котором установлена с возможностью вращения коробка планетарной передачи 14. Коробка планетарной передачи 14 содержит части 14а и 14b. Входной элемент привода, который содержит входной вал 11, установлен соосно с коробкой планетарной передачи 14 на подшипнике 12 и подшипнике 13. Подшипник 13 может быть представлен любым подходящим подшипником, известным в технике, включая шарикоподшипники и игольчатые подшипники, но не ограничиваясь ими. Запорное кольцо 86 удерживает подшипник 13 в части 14b коробки планетарной передачи. Запрессованное кольцо 12а удерживает подшипник 12 в части 14а коробки планетарной передачи. Коробка планетарной передачи 14 установлена с возможностью вращения в корпусе 5 на подшипниках 46, 47. Подшипники (46, 47) могут быть представлены любыми подходящими подшипниками, известными в технике, включая шарикоподшипники и игольчатые подшипники. Запорное кольцо 85 удерживает подшипник 46 в части 14b коробки планетарной передачи.
Части 14а, 14b коробки планетарной передачи соединяются вместе осями 16. Оси 16 содержат штифты, один конец которых запрессован в часть 14а. Другой конец взаимодействует с частью 14b и также может быть запрессован.
Уплотнения (76, 78) содержат в передаче тяговую жидкость и препятствуют попаданию в передачу посторонних материалов.
Осевое цилиндрическое удлинение 22 части 14а образует один из двух соосных выходных элементов привода или валов передачи. Другой выходной вал 102 является осевым удлинением части 14b. Можно видеть, что выходные валы 22 и 102 вращаются с одинаковой скоростью, поскольку каждый из них механически соединен с коробкой планетарной передачи 14.
Коробка планетарной передачи 14 является средством, с помощью которого осуществляется передача крутящего момента от входного вала 11 на выходные валы и шкив 101. Для этого коробка планетарной передачи 14 содержит также четыре планетарных ведомых элемента 15, расположенных симметрично относительно оси входного вала 11 между внутренними дорожками качения (23а, 23b) и наружными дорожками качения (27а, 27b). Каждый планетарный ведомый элемент 15 помещен с возможностью вращения на каждой оси 16 с помощью игольчатых подшипников 60 или любых других подходящих подшипников, известных в технике. Каждый ведомый элемент 15 может перемещаться аксиально вдоль каждой оси 16 под влиянием перемещения каждого планетарного элемента 25, как показано на фиг.3.
Ведомые элементы 15 обладают вогнутым дугообразным профилем, приближение к которому достигается с помощью соединения на главной оси каждого из них двух усеченных конусов, см.фиг.7. Коническая форма каждого ведомого элемента обеспечивает преимущество при взаимодействии ведомого элемента со сферическим планетарным элементом 25. А именно дугообразная вогнутая форма обеспечивает две точки контакта между поверхностью ведомого элемента 15 и поверхностью планетарного элемента 25, значительно уменьшая таким образом усилия взаимодействия и повышая таким образом долговечность при высоких нагрузках по сравнению со взаимодействием в одной точке.
Что касается вращающихся узлов, то входной вал 11 содержат радиально внутреннюю дорожку качения, которая содержит две части 23а и 23b внутренней дорожки качения. Часть 23а выполнена как одно целое с валом 11 или может также представлять собой отдельную часть, которая надета с прессовой посадкой на вал 11. Каждая из частей 23а и 23b содержит соответственно дугообразные поверхности 27а и 27b, по которым катятся планетарные элементы 25.
Часть 23b является регулируемым элементом и может перемещаться по оси по валу 11 с помощью винтового средства взаимодействия, которое содержит шариковую винтовую пару, как показано на фиг.3. Шариковый винт состоит из витков резьбы или винтовых каналов 37 и 38 с катящимися элементами или шариками, согласованно размещенными в них, см. фиг.10. Винтовые каналы 37 и 38 и шарики могут быть в качестве альтернативы заменены известным резьбовым взаимодействием, например резьбой «аякс» или «акме» на части 23b и входном валу 11.
Благодаря винтовой форме каналов 37, 38 относительное вращение входного вала 11 и части 23b в одном направлении вызовет аксиальное смещение части 23b по направлению к части 23а. Аксиальное разделение двух частей 23а, 23b внутренней дорожки качения происходит, если относительное вращение между входной частью 23b и входным валом 11 имеет противоположную направленность.
Часть 23b остается в постоянном неплотном контакте с планетарными элементами 25 с помощью отжимающего элемента 40 винтового средства взаимодействия. Отжимающий элемент 40 содержит торсионную пружину и имеет конец, находящийся в зацеплении с ограничителем на валу 11 в виде элемента 41, и другой конец, находящийся в зацеплении с частью 23b. Пружина 40 постоянно сжата, так что часть 23b постоянно отжимается на валу 11 и вдоль него, вызывая относительное вращательное движение, вызывающее относительное аксиальное смещение части 23b и вызывая таким образом постоянное взаимодействие части 23b с планетарными элементами 25.
Наружная дорожка качения 26 содержит отстоящие по оси части 26а, 26b наружной дорожки качения. Наружная дорожка качения 26 содержит часть 26а, которая имеет отходящую аксиально цилиндрическую часть 42, с которой взаимодействует с вращением вторая часть 26b наружной дорожки качения. Часть 26а и часть 26b соединяются с возможностью вращения с помощью винтового средства взаимодействия, причем эта комбинация содержит средство для избирательного варьирования расстояния по оси между частями дорожками качения. А именно: внутренняя поверхность цилиндрической части 42 имеет винтовой канал 43. В радиальном направлении часть 26b наружной дорожки качения является регулирующим элементом и имеет на своей наружной цилиндрической поверхности винтовой канал 44. Элементы качения или шарики 48, находящиеся во взаимодействии качения, располагаются между каналом 43 и каналом 44, обеспечивая поворот части 26b наружной дорожки качения относительно части 42. Канал 43, канал 44 и шарики 48 образуют вместе шаровой винт. Каналы 43, 44 имеют шаг, достаточно крупный для того, чтобы обеспечить своевременное изменение передаточного числа в пределах между крайними значениями, не требуя при этом избыточного перемещения червячного колеса для изменения передаточного числа, см. фиг.9, но и не настолько крупный, чтобы обеспечивать разведение дорожек качения просто за счет условий контакта. Винтовые каналы 43 и 44 и шарики могут быть заменены резьбовым взаимодействием, включая резьбу «аякс» или «акме». Угловое смещение или поворот части 26b наружной дорожки качения относительно части 26а для достижения полного изменения передаточного числа составляет приблизительно 150°.
Планетарные элементы 25 катятся по путям качения элементов дорожки качения. Пути качения частей 23а, 23b внутренней дорожки качения и части 26а, 26b наружной дорожки качения, обозначенные соответственно позициями 27а, 27b и 28а, 28b, имеют каждая, в поперечном разрезе, частично круговую дугообразную поверхность, радиус которой несколько больше радиуса (RS) каждого сферического планетарного элемента 25.
Различие в радиусе между каждым планетарным элементом 25 и путями 27а, 27b, 28a, 28b ведет к теоретически точечному взаимодействию между каждым элементом и каждым путем. Радиус кривизны поверхности 27а и 27b можно подобрать таким образом, чтобы обеспечить нужную степень изменения передаточного числа в зависимости от скорости, с которой элементы 25 перемещаются в радиальном направлении во время такого изменения передаточного числа.
Пятна контакта между элементами 25 и путями 27а, 27b, 28a, 28b не должны быть слишком большими, чтобы избежать т.н. потерь от вращения, возникающих из-за усилий, развивающихся в гидродинамической жидкости, находящейся между двумя элементами, находящимися в контакте качения. Между частями 23а и 23b располагается галерея 70, которая образует путь для обратного потока тяговой жидкости, циркулирующей между элементами 25 и внутренней и наружной дорожками качения.
С помощью использования исполнительного механизма и червячного привода положение по оси двух частей 26а, 26b наружной дорожки качения контролирует радиальное положение планетарных элементов за счет приложения к планетарным элементам 25 давления, заставляя их перемещаться радиально внутрь по направлению к входному валу 11, раздвигая таким образом две части 23а, 23b внутренней дорожки. Это изменяет передаточное число передачи. Торсионная пружина 40 обеспечивает постоянное взаимодействие части 23b дорожки качения с элементами 25. Конечно, части 26а и 26b наружной дорожки качения также могут раздвигаться, вызывая таким образом перемещение планетарных элементов от входного вала 11 и позволяя таким образом частям 23а и 23b перемещаться по оси по направлению друг к другу за счет использования средства, воспринимающего крутящий момент.
Часть дорожки качения 26а вращается внутри выемок в корпусе 5, когда перемещается с целью изменения передаточного числа в аксиальном направлении, параллельном оси Х-Х. Ось Х-Х является общей осью вращения передачи, включая входной вал 11, внутреннюю и наружную дорожки качения 23, 26, выходные валы 22, 102, будучи также центром орбитальной траектории сферических планетарных элементов 25. Часть 26b дорожки качения находится в зацеплении с корпусом 5 таким образом, чтобы предотвратить вращение части 26b относительно корпуса 5, но и так, чтобы обеспечить перемещение по оси части 26b по направлению к части 26а или от нее при вращении части 26а.
Передача обладает также присущим ей односторонним защелкивающим действием, основанным на срабатывании механизма восприятия крутящего момента. При интенсивном торможении, когда инерционный крутящий момент компонента достаточен для преодоления нагружающего момента и момента трения, прямой выход становится в передаче ведущим. Это вызывает уменьшение усилия зажима на внутренней дорожке качения 23b при существовании обгонного режима.
Корпус 5 обладает в поперечном разрезе приблизительно прямоугольной формой. Пальцы 71 соединяют сторону корпуса 72 и сторону корпуса 73 с корпусом 5 с помощью гаек 74, см. фиг.8. Охлаждающие ребра (CF), отходящие от наружной поверхности корпуса 5, могут использоваться для охлаждения передачи и тяговой жидкости.
Корпус 5 содержит резервуар 75, который принимает и содержит тяговую жидкость для передачи. Система тяговой жидкости не герметизирована и вместо этого работает при давлении окружающей среды. Коробка 14 поворачивается, будучи частично погружена в тяговую жидкость, содержащуюся в резервуаре 75. Тяговая жидкость в процессе работы попадает во вращающиеся части передачи. Тяговая жидкость обеспечивает между поверхностями планетарных элементов или шаров и дорожек качения заданный коэффициент трения. Жидкость течет вокруг планетарных элементов и покидает наружную дорожку качения через зазор 77, и внутреннюю дорожку качения - через зазор 70. Тяговая жидкость также охлаждает передачу.
Тяговая жидкость может быть представлена любой из подходящих для этих целей жидкостей, известных в технике, которые включают Santotrac® 50 и Santotrac® 2500. Каждая жидкость является обладающей низкой вязкостью тяговой жидкостью на основе синтетического углеводорода, применяемой в тех случаях, когда требуется среда с высокой прочностью пленки. Жидкости поставляет компания Findett Corporation, 8 Governor Drive, Сент-Чарльз, шт. Миссури 63301.
Корпус 5 содержит также средство для монтажа на двигателе, см. фиг.11.
Хотя настоящее описание включает систему привода вспомогательных агрегатов с постоянной скоростью с ориентацией на автомобили, следует понимать, что передача согласно настоящему изобретению может использоваться в любой сфере, требующей передачи, расположенной между движителем и ведомым оборудованием. В этих случаях движитель может быть соединен со входным валом 11 передачи непосредственно, так же как с помощью ремня и шкива. Передача согласно настоящему изобретению может использоваться в качестве примера, но не в целях ограничения ее рамок, в приводах на ведущие колеса транспортного средства или мотоцикла, таких как передачи, а также в шламовых насосах, воздушных и газовых компрессорах, системах отопления, нагревания и вентиляции воздуха, пневматическом оборудовании, насосах для работы с насыпным материалом и т.д. В каждом случае привод оборудования осуществляется первичным движителем, таким как электромотор или двигатель внутреннего сгорания. Передача располагается между мотором или двигателем и ведомым оборудованием или приводом на ведущие колеса. Возможность плавного изменения передаточного числа обеспечивает точный и бесступенчатый контроль частоты вращения ведомого оборудования. Передача согласно настоящему изобретению обладает преимуществом предложения самого широкого возможного диапазона передаточных чисел для требований системы привода по сравнению с передачей зубчатого типа. Кроме того, особенность наличия сдвоенного выхода передачи позволяет осуществлять привод двух элементов оборудования с помощью одной передачи и при использовании единственного движителя. При наличии ременного привода на выходе передачи возможно ведение нескольких элементов ведомого оборудования при различной частоте вращения.
Описание процесса работы
В процессе работы привод входного ведущего вала 11 осуществляется ремнем В1, взаимодействующим со шкивом 100. Вращение входного ведущего вала 11 вызывает вращение внутренней дорожки качения 23 с целью вращения и переноса вместе с ней на поверхностях 27а и 27b за счет контакта качения планетарных элементов 25, которые катятся по криволинейным поверхностям 28а и 28b наружной дорожки качения 26. Планетарные элементы 25 удерживаются за счет своего контакта с криволинейными поверхностями 27а, 27b и 28а, 28b радиально внутренней и радиально наружной дорожек качения 23, 26 соответственно. Поскольку часть 23а внутренней дорожки качения зафиксирована относительно вала 11, все радиальные и аксиальные перемещения сферических элементов 25 определяются и устанавливаются по отношению к части 23а. Поэтому путь, по которому следует центр каждого элемента 25, описывает кривую, совпадающую с дугообразной формой поверхности 27а.
Механизм действует как воспринимающее крутящий момент средство, которое позволяет компенсировать вращательное и аксиальное перемещение подвижной части 23b внутренней дорожки качения относительно фиксированной части 23а дорожки качения. Воспринимающее крутящий момент средство содержит отжимающий элемент 40 и винтовое средство взаимодействия 37, 38, 39, реагирующее на усилия, приложенные путем передачи движущих сил между радиально внутренней дорожкой качения 23 и планетарными элементами 15. Воспринимающее крутящий момент средство служит как для определения компенсирующего изменения разделения частей внутренней дорожки качения 23 и, таким образом, передаточного числа устройства, так и для изменения усилий, которыми обмениваются планетарные элементы и дорожки качения и которые направлены по нормали к поверхности раздела между ними.
Иначе говоря, воспринимающее крутящий момент винтовое средство взаимодействия реагирует на прямое круговое усилие и аксиальное усилие, имеющее круговую составляющую. Круговая составляющая осевого усилия по существу равна и имеет противоположную направленность относительно указанного прямого кругового усилия, на которое реагирует винтовое средство взаимодействия. Это сводит к минимуму усилие, которое требуется приложить к средству управления для избирательного варьирования осевого расстояния между двумя отстоящими по оси частями наружной дорожки качения с целью сохранения или изменения передаточного числа передачи.
Каждый планетарный элемент 25 дополнительно взаимодействует во вращении с ведомым элементом 15. Планетарное движение элементов 25 передается ведомым элементам 15 и через оси 16 коробке планетарной передачи 14, которая в свою очередь соединяется с выходными валами 22 и 102. Поскольку элементы 25 перемещаются относительно вала 11 и по радиусу и по оси во время изменения передаточного числа передачи, каждый ведомый элемент также слегка может перемещаться на подшипниках 60 в направлении, параллельном оси Х-Х, так что во всем диапазоне перемещения каждого ведомого элемента сохраняется нужный контакт с каждым элементом 25.
Изменение передаточного числа передачи осуществляется путем изменения относительного положения или расстояния между частями 26а, 26b наружной по радиусу дорожки качения. Это вызывается путем вращения в одном или другом направлении части 26а наружной дорожки качения с помощью червячной передачи 90. Вращение части 26а наружной дорожки качения вызывает приложение к планетарным элементам 25 большего или меньшего усилия, отжимающего их по радиусу внутрь по направлению к внутренней дорожке качения 23. Когда две части 26а, 26b наружной дорожки качения сводятся вместе, усилия, прилагаемые к планетарным элементам 25, возрастают. Обращенное радиально внутрь усилие, приложенное к внутренним дорожкам качения 23а, 23b, разводит их в стороны за счет относительного вращения части 23b дорожки качения относительно вала 11 за счет действия шаров 39 в каналах 37, 38.
Часть 23b дорожки качения вращается с такой же скоростью, как часть 23а дорожки качения, не считая небольшого кратковременного изменения, когда имеет место относительное движение по ограниченной дуге с целью компенсирующей поправки давления, приложенного к планетарным элементам 25. Более конкретно вращение вала 11 в заданном направлении привода вызывает приближение по оси части 23b дорожки качения к части 23а дорожки качения при гидравлическом сопротивлении, так что любой люфт в контакте качения между дорожками качения и планетарными элементами 25 снимается, до тех пор пока любые усилия, действующие на винтовом взаимозацеплении между частью 23b дорожки качения и ведущим валом 11, не придут в соответствие с силами реакции между частью 23b и планетарными элементами 25. В этой точке никакое аксиальное смещение части 23b дорожки качения относительно части 23а дорожки качения больше не имеет места.
Передаточное число определяется радиальным положением части 26а дорожки качения и соответственно планетарных элементов 25. Функция каналов 37, 38 внутренней дорожки качения и шариков 39 заключается в поддержании нормального к касательной (тягового) усилия (n/f) в точке контакта каждого планетарного элемента 25 в определенных рамках. Это число должно быть достаточно большим для того, чтобы не допускать излишнего проскальзывания (по меньшей мере n/f=10 для граничной смазки, и до в два раза большего значения для полной гидродинамической смазки), но не настолько большим, чтобы прикладывалось значительно большее, чем требуется, нормальное усилие N, что может значительно снизить эффективность, перегрузочную способность по крутящему моменту и срок службы агрегата.
Форма сферического планетарного элемента 25 хорошо подходит для этой роли, поскольку такой планетарный элемент находится в равновесии под воздействием четырех периферийных контактных «сжимающих» усилий, приложенных дорожками качения в плоскости фиг.2 (направление y) и приводящей силы, направленной через центр элемента по нормали к плоскости чертежа (направление z), причем y/z сохраняет одно значение вне зависимости от того, где могут располагаться на периферии точки контакта. Это означает, что значения y/z внутренней и наружной дорожек качения равны при любом заданном значении передаточного числа передачи. Торсионная пружина 40, воздействующая на внутреннюю дорожку качения 23b, обеспечивает достаточную предварительную нагрузку для того, чтобы гарантировать всегда наличие достаточного контактного давления для того, чтобы воспринимающий крутящий момент механизм действовал при возрастании крутящего момента с нуля.
Корпус 5 с концевыми частями 72 и 73 содержит регулируемую передачу во всей полноте, за исключением входного и выходного валов и червячной передачи, что делает весь блок очень компактным. Поэтому изобретение очень подходит, например, для привода вспомогательных агрегатов с постоянной скоростью. При использовании в системе ременного привода вспомогательных агрегатов выход передачи 1000 содержит на выходном валу 22 многореберный шкив. Другой выходной вал 102 отходит соосно противоположному валу 22. Вал 102 также может быть напрямую соединен со вспомогательным агрегатом, таким как компрессор кондиционера, см. фиг.11. Сочетание передачи, монтажного кронштейна и присоединенного вспомогательного агрегата образует полный узел, который может быть установлен как единый блок на двигателе транспортного средства. Конечно, компрессор кондиционера (А/С) приведен только в качестве примера, и возможна установка на передаче также любого другого вспомогательного агрегата, включая, но не ограничиваясь ими, насос усилителя рулевого управления, генератор, топливный насос, масляный насос, водяной насос, а также любой другой вспомогательный агрегат.
Следует отметить, что входной и выходной элементы могут поменяться своими соответствующими функциями, т.е. вход может приниматься через вал 22, а выход передаваться через вал 11. Это ведет к увеличению крутящего момента на выходе по сравнению с крутящим моментом на входе. Поэтому передача может работать в любом направлении передачи вращательного крутящего момента.
При конфигурации дорожки качения, показанной на фиг.3, радиус контакта качения (R1) между элементами 25 и внутренней дорожкой качения 23 относительно велик, а радиус контакта качения (R2) между элементами 25 и наружной дорожкой качения 26 относительно мал. При такой конфигурации передаточное число между входным валом 11 и выходным валом 22, 102 составляет приблизительно 1,0. Как описано по всему этому описанию изобретения, радиус контакта качения определяется относительным положением частей 26а и 26b. Осевое положение части 26b определяется червячным приводом 90, см. фиг.9. Воздействие червячного привода 90 на часть 26а сдвигает по оси часть 26b путем частичного поворота части 26а вокруг оси 11 или по часовой, или против часовой стрелки.
Как показано на фиг.4, при работе червячного привода 90 в направлении, противоположном показанному на фиг.3, часть 26b дорожки качения движется по оси по направлению к части 26а, когда часть 26а вращается, так что элементы 25 принуждаются перемещаться по радиусу внутрь. Перемещение элементов 25 компенсируется приближением по оси части 23b внутренней дорожки качения к части 23а, вызванным воздействием торсионной пружины 40 на часть 23b. При такой конфигурации радиус контакта качения (R2) между элементами 25 и внутренней дорожкой качения 23 относительно мал, а радиус контакта качения (R4) между элементами 25 и наружной дорожкой качения 23 относительно велик. При такой конфигурации передаточное число между входным валом 11 и выходным валом 22, 102 составляет приблизительно 0,3.
Поскольку часть 23а внутренней дорожки качения не движется, элементы 25 катятся по поверхности 27а и таким образом следуют контуру поверхности 27а. Центр каждого элемента 25 движется приблизительно в направлении D2, смещаясь по радиусу внутрь и по оси одновременно с изменением передаточного числа с фиг.3 к фиг.4.
Отношение входа и выхода также зависит от отношения диаметров входного шкива 100 и выходного шкива 101, добавляя таким образом другой размер изменчивости к системе, являющейся предметом настоящего изобретения. Например, диаметр выходного шкива 101 может быть подобран таким образом, чтобы взаимодействовать с диаметром шкивов каждого из вспомогательных агрегатов. Правильный выбор каждого из шкивов в системе позволяет получить нужную частоту вращения для каждого вспомогательного агрегата при соответствующей частоте вращения коленчатого вала двигателя. Отличающиеся отношения шкивов улучшаются особенностью плавной регулируемости передачи.
На фиг.5 показан в поперечном разрезе перспективный вид вала и дорожек качения. Показаны внутренняя дорожка качения 23 и наружная дорожка качения 26. Часть 23b внутренней дорожки качения движется в направлении ±D за счет вращения на входном валу 11 на шариковом винте (37, 38, 39). Часть 26b наружной дорожки качения движется в направлении ±D также за счет вращения части 26а наружной дорожки качения в направлении R на шариковом винте 43, 44, 48, см. фиг.10. Канал для жидкости 77 образует путь для циркуляции тяговой жидкости, покидающей коробку и область дорожек качения и возвращающуюся в резервуар 75. Ось вращения передачи помечена позицией Х-Х.
На фиг.6 показана в частичном разрезе коробка передачи. Коробка 14 состоит из части коробки 14а и части коробки 14b. Скобы 80 ведомых элементов располагаются симметрично относительно коробки 14. Каждая ось 16 соединяется со скобой 80 и соответственно с коробкой 14 в отверстиях 82. Установочные штифты 84, расположенные в отверстиях 81, используются для должного выравнивания частей 14а и 14b коробки. Планетарный элемент 25 катится внутри соответствующего пространства 83. Пространства 83 располагаются симметрично по коробке 14 между скобами 80 ведомых элементов. Запорное кольцо 86 взаимодействует с частью 14b в пазу 96. Выходные валы 22 и 102 отходят от частей коробки 14а и 14b соответственно.
На фиг.7 показан в частичном разрезе вид узла ведомого механизма. Ведомый элемент 15 имеет дугообразную форму с поперечным сечением, приближение к которому достигается с помощью соединения вершинами двух усеченных конусов. Это ведет к получению по существу вогнутого поперечного сечения с радиусами А1 и А2, взаимодействующими с элементами 25. Радиус А1 может быть равен или превышать радиус А2. Эта форма имеет преимущество, поскольку обеспечивает две точки контакта с каждым шаром 25 и ведомым элементом 15. Это обеспечивает улучшение эффективности и точности при передаче крутящего момента. Это позволяет также уменьшить нагрузку за счет перехода с одной точки на две точки без значительного увеличения потерь на трение качения. Чтобы следовать каждому элементу 25 при изменении передаточного числа, ведомый элемент 15 может несколько смещаться аксиально в направлении М на игольчатых подшипниках 60 вдоль оси 16. Игольчатые подшипники 60 помещаются между уступами 61, 62 на оси 16. Уступы 61, 62 могут содержать для размещения подшипника 60 запорные кольца, известные в технике. Ведомый элемент 15 показан смещенным по оси на оси 16.
На фиг.8 показана деталь корпуса и наружной дорожки качения. Корпус 5 содержит секции 72, 73. Часть 26b наружной дорожки качения показана со штифтами 26с. Штифты 26с входят в отверстия в секции корпуса 72. Часть 26b дорожки качения может свободно перемещаться в аксиальном направлении (относительно оси Х-Х) по штифтам 26с, когда часть 26а наружной дорожки качения поворачивается червячной передачей 90. Штифты 26 не допускают вращения части 26b наружной дорожки качения при вращении части 26а.
Пальцы 71 и гайки 74 удерживают секции корпуса 72 и 73 вместе. На наружной поверхности корпуса 5 помещены охлаждающие ребра (CF), которые излучают тепло передачи.
На фиг.9 показана деталь привода дорожки качения. Червячная передача 90 содержит шаговый двигатель 96 постоянного тока. В качестве примера, но не в качестве ограничения можно указать, что подходящий шаговый двигатель выпускает фирма LIN Engineering, модель номер 4218L-01. Шаговый двигатель можно увидеть в сайте www.linegineering.com/our products/4218.htm. Возможно также использование другого шагового двигателя, известного в технике. Устройство управления 97 шаговым двигателем также известно в технике и может быть получено у LIN Engineering или другого подходящего поставщика.
Звездочка 91 соединяется с выходным валом двигателя 96. В качестве примера звездочка 91 содержит 30 зубцов и начальный диаметр 28,65. Взаимодействующая звездочка 92 прикреплена к шестерне 94 червячного привода. В качестве примера звездочка 92 содержит 15 зубцов и начальный диаметр 14, 32 мм. Поэтому передаточное число в этом не ограничивающем примере составляет 2:1. Зубчатый ремень В3 захвачен между звездочками 91 и 92 и содержит 45 зубцов при шаге 3 мм при общей начальной длине 135 мм.
Червячная шестерня 93 выточена на шестерне 94 червячного привода. Взаимодействующая с ней червячная зубчатая рейка 95 выточена на части 26а наружной дорожки качения. Типичный комплект червячных колес может быть получен у компании W.M.Berg в www.wmberg.com, инвентарный номер WCS-7S. Например, червячная шестерня 93 содержит однозаходную резьбу с начальным диаметром 12,0 мм, шагом 3,14159 мм, углом подъема резьбы 4,75 градусов и углом зацепления 14,5 градусов. Начальный диаметр червячной шестерни 95 составляет 88 мм и она содержит 88 зубцов. Таким образом, модуль зубчатого зацепления составляет 1,0. Геликоидальный угол равен 4,75 градусов, угол зацепления равен 14,5 градусам и окружной шаг равен 3,14159 мм. Расстояние между центрами червячной передачи составит 50,00 мм (1/2 от (88+12)), и отношение равно 88:1.
Между шестерней 94 и подшипником в корпусе 5 образован фрикционный компонент, а именно: шестерня 94 аксиально взаимодействует с фрикционным элементом, состоящим из упорной шайбы 97 в корпусе 5, см. фиг.2. Упорная шайба 97 обладает коэффициентом трения на своей поверхности, находящейся в соприкосновении с шестерней 94. Сила трения, возникающая за счет соприкосновения между шайбой 97 и шестерней 94, противостоит вращению шестерни в процессе работы, но в особенности она предупреждает вращение шестерни, когда требуется, чтобы червячная передача и, следовательно, наружная дорожка качения оставалась неподвижной и, следовательно, ограничивалось аксиальное смещение части дорожки качения, например для получения частоты вращения двигателя в устойчивом режиме и, следовательно, для обеспечения условий работы передачи в устойчивом режиме. В таком состоянии устойчивого режима двигатель 96 выключается. Фрикционной противоположной поверхностью для упорной шайбы 97 является алюминиевый корпус 5.
Упорная шайба 97 может быть выполнена из стали. Она может также содержать покрытие или фрикционную поверхность, наплавленную на стальной вкладыш.
С не имеющей покрытия стальной упорной шайбой возможно использование консистентной смазки или легкое масло. В этом случае коэффициент шайбы, являющейся исключительно стальной, составляет приблизительно 0,9-1,1. В случае необходимости уменьшить коэффициент трения по сравнению с указанным для стали возможно использование следующих термопластических материалов (в качестве примера, но не ограничения): Arlen AE 4200 (Mitsui Petrochemical), Lubricomp 189 (LNP Engineered Plastics). Коэффициент трения термопластических материалов составляет приблизительно от 0,06 до 1,0. С термопластическими материалами масло или консистентная смазка не используются.
В случае необходимости повысить коэффициент трения по сравнению с указанным для стали возможно использование следующих термопластических материалов (в качестве примера, но не ограничения): Lubriloy RL (LNP Engineered Plastics), TEP 642 (Thomson Industries). Коэффициент трения с использованием этих материалов составляет приблизительно от 0,14 до 1,2. С этими термопластическими материалами масло или консистентная смазка не используются.
Любой из перечисленных термопластических материалов может быть наплавлен на стальной вкладыш шайбы или может использоваться без стального вкладыша.
Описанная механическая и фрикционная конфигурация делает червячную передачу автоблокирующейся, кода двигатель 96 не работает. Крутящий момент, создаваемый двигателем 96, должен быть достаточным только для того, чтобы преодолеть силу трения между шайбой 97 и шестерней 94 и радиальную силу элементов 25, чтобы вызвать таким образом вращение части 26а наружной дорожки качения. После перемещения наружной дорожки качения в нужное положение и получения при этом нужного передаточного числа передачи двигатель 96 выключается. Фрикционные характеристики червячного привода не допускают дальнейшего вращения (и аксиального перемещения) наружной дорожки качения 26а за счет применения автоблокирующейся шестерни.
На фиг.10 показан вид передачи в поперечном разрезе. Как показано также на фиг.2 и фиг.9, внутренний шариковый винт содержит взаимодействующие винтовые каналы 37 и 38 с шариками, согласованно размещенными в них. В качестве примера, но не в качестве ограничения, шариковый винт имеет начальный диаметр 18 мм, шаг 9,57 мм и шарики диаметром 2,65 мм. Геликоидальный угол равен 9,61 градусу. Шариковый винт содержит три захода. Количество шариков для каждого захода составляет 33 при общем количестве 111 шариков. Осевая длина по шарикам составляет 21,5 мм.
Как показано во всем настоящем описании, часть 26b наружной дорожки качения движется в направлении ±D путем вращения внутри части 26а наружной дорожки качения в направлении R на шариковом винте 43, 44, 48. см. фиг.5. Шариковый винт имеет начальный диаметр 107 мм, шаг 16,01 мм и шарики диаметром 3,00 мм. Геликоидальный угол равен 2,73 градуса при 4 заходах. Количество шариков для каждого захода составляет 15. Общее количество шариков равно 60. Осевая длина по шарикам составляет 8,4 мм.
Шестерня 94 вставлена в корпус 5. Двигатель 96 закреплен непосредственно на корпусе 5 средствами, известными в технике, такими как штифты, болты или винты. Смазывание разбрызгиванием тяговой жидкостью обеспечивается для обоих шариковых винтов путем вращения коробки планетарной передачи 14.
На фиг.11 показан перспективный вид сдвоенного варианта реализации. В этой приведенной в качестве примера компоновке компрессор АС кондиционера непосредственно соединен с передачей 1000. Входная муфта АС непосредственно соединена с выходным валом 102, см. фиг.12. Для крепления АС к корпусу 5 передачи 1000 используют известные в технике крепежные изделия 200, например штифты, болты или шпильки. Крепежные изделия 200 входят в элементы корпуса 202. Крепежные изделия 201 соединяют АС с блоком двигателя. Крепежные изделия 201 включают в себя штифты, болты или винты, или любые другие подходящие крепежные изделия, известные в технике.
В этом варианте реализации с передачи снимают пылезащитный чехол 103, показанный на фиг.10, чтобы обеспечить непосредственное соединение входной муфты АС с валом 102.
Пылезащитный чехол 1001 защищает ремень В3 от мусора.
На фиг.12 показан местный перспективный вид сдвоенного варианта реализации. Большая часть передачи 1000 удалена с этого изображения за исключением части коробки 14b и вала 102. Вал 102 части коробки 14b показан соединенным напрямую со входной муфтой компрессора кондиционера АСС. Компрессор кондиционера работает с такой же частотой вращения, как выходной вал 102. Однако компрессор кондиционера необязательно работает с такой же частотой вращения, как ведомые вспомогательные агрегаты. Частота вращения компрессора кондиционера является функцией диаметра шкива А коленчатого вала и входного шкива 100 передачи и передаточного числа. Поэтому частота вращения компрессора, соединенного, как показано, напрямую, частично определяется диаметром входного шкива 100. С другой стороны, привод других вспомогательных агрегатов, показанных на фиг.1, осуществляется выходным шкивом 101, диаметр которого также выбирают таким образом, чтобы придать нужному вспомогательному агрегату частоту вращения, отличающуюся или равную частоте вращения компрессора воздушного кондиционера, исходя из диаметра каждого из шкивов вспомогательных агрегатов. Поэтому конструкция сдвоенного вспомогательного агрегата допускает две независимые частоты вращения вспомогательного агрегата: одна соответствует частоте вращения выходного вала 102, и другая является функцией соотношения между диаметром шкива 101 и диаметрами шкивов различных отдельных вспомогательных агрегатов. Это создает широкие возможности оптимизации системы.
На фиг.13 показана блок-схема системы управления. Аппаратное и программное обеспечение управления содержит микропроцессор 98(А) контроллера шагового двигателя и программу, помещенную в память микропроцессора. Программа, помещенная в память микропроцессора, содержит пропорционально-дифференциальную (PD) схему управления (В). Кроме того, в памяти хранится предназначенная для использования с программой заданная частота вращения вспомогательного агрегата (С). Микропроцессор 98 получает сигналы от датчика частоты вращения коленчатого вала и датчика частоты вращения вспомогательного агрегата.
Пропорционально-дифференциальное управление обеспечивает эффективную и простую стратегию управления. Программа вычисляет расхождение между нужной частотой вращения вспомогательного агрегата (С) и фактической частотой вращения вспомогательного агрегата (получена контуром обратной связи). Она принимает вычисленное расхождение между заданной частотой вращения вспомогательного агрегата и фактической частотой вращения и определяет его масштаб с пропорциональной постоянной и дифференциальной постоянной. При наличии расхождения между заданной частотой вращения и фактической частотой вращения происходит генерирование сигнала погрешности, который передается на пусковое устройство 97 шагового двигателя, которое заставляет шаговый двигатель 96 регулировать передаточное число для того, чтобы привести частоту вращения вспомогательного агрегата в большее соответствие с нужной частотой вращения. Когда фактическая частота вращения вспомогательного агрегата становится равной заданной частоте вращения, сигнал погрешности исчезает и шаговый двигатель выключается. Как описано в другом месте, автоблокирующаяся червячная передача и наружная дорожка качения не допускают изменения передаточного числа передачи при выключенном шаговом двигателе. Питание шагового двигателя может осуществляться от системы постоянного тока напряжением 12 В или 42 В.
Описание работы системы
С помощью программ моделирования транспортного средства, например GT-Drive™ компании Gamma Technologies, Inc., можно дать количественную характеристику преимуществ системы CSAD, являющейся предметом настоящего изобретения. Следующий примерный анализ относится к моделированию автомобиля Ford Focus™ с двигателем 2 л и ручной передачей с пятью скоростями.
Карта кпд коробки передач является следующей:
КПД выражен в %, частота вращения - в об/мин и крутящий момент - в Н/м.
Значительно улучшенные показатели разгона транспортного средства с использованием системы, являющейся предметом изобретения, показаны на фиг.14. На фиг.14 изображены различия в показателях разгона транспортного средства для двух приведенных в качестве примера частот вращения вспомогательных агрегатов. Кривая (В) изображает показатели работы существующего двигателя с использованием существующей асинхронной ременной приводной системы (ABDS). В существующей системе частота вращения привода вспомогательных агрегатов прямо пропорциональна частоте вращения коленчатого вала, поскольку вспомогательные агрегаты непосредственно соединяются с коленчатым валом одним ремнем. В сравнении с этим, при работе выходного шкива 101 передачи с постоянной скоростью приблизительно 885 об/мин (кривая (А)) с использованием системы, являющейся предметом изобретения, достигается улучшение приблизительно на 4 сек периода разгона от 0 до 60 миль/час. 885 об/мин является числом оборотов холостого хода, когда генератор вырабатывает примерно 70% своей номинальной мощности. Когда вспомогательные агрегаты применяются при постоянной частоте вращения 2000 об/мин (кривая (С)), минимальной скорости, при которой генератор вырабатывает примерно 100% своей номинальной мощности, улучшение длительности периода разгона от 0 до 60 миль/час составляет лишь немногим меньше чем приблизительно 4,0 сек. В любом случае (А или С) эксплуатация вспомогательных агрегатов с постоянной частотой вращения, равной или меньшей чем частота вращения коленчатого вала двигателя, значительно улучшает показатели работы транспортного средства путем придания ведущей оси дополнительного крутящего момента, который в противном случае использовался бы для привода вспомогательных агрегатов.
На фиг.15 графически показано, что хотя частота вращения двигателя непрерывно меняется при смещении передачей зубчатых колес, частота вращения вспомогательных агрегатов при использовании являющейся предметом изобретения системы CSAD остается по существу постоянной. А именно частота вращения валов 22 и 102 остается по существу постоянной в диапазоне рабочих частот вращения коленчатого вала для по существу двух рабочих состояний двигателя, включающих частоты вращения, превышающие холостой ход, и частоту вращения двигателя на холостом ходу. Насос усилителя рулевого управления (PS), компрессор кондиционера (АС), генератор (ALT) и водяной насос работают все при по существу постоянной частоте вращения для каждого из двух рабочих состояний, хотя частота вращения генератора относительно выше частоты вращения других вспомогательных агрегатов. Частоты вращения, проиллюстрированные на фиг.15, приведены только в качестве примера относительных рабочих характеристик компонентов привода, но не в качестве ограничений частот вращения вспомогательных агрегатов системы.
При сопоставлении системы, являющейся предметом настоящего изобретения, с существующими техническими решениями на фиг.16 показано изменение частоты вращения для существующей системы с соединением привода вспомогательных агрегатов с коленчатым валом при постоянном передаточном числе. Частота вращения вспомогательных агрегатов (В), (С) и (D) прямо пропорциональна частоте вращения коленчатого вала (А), поскольку привод вспомогательных агрегатов непосредственно связан с коленчатым валом ремнем. Такая принятая форма работы неэффективна, поскольку каждый вспомогательный агрегат должен иметь возможность удовлетворительно работать при широком диапазоне частот вращения коленчатого вала.
На фиг.17 изображены типичные изменения передаточного числа передачи с целью сохранения постоянства частоты вращения в приводе вспомогательных агрегатов.
Примеры улучшения топливной экономичности показаны для других частот вращения вспомогательных агрегатов:
Значения в % указывают долю времени, в течение которой работают кондиционер (АС) и генератор (ALT). Например, можно видеть, что в случае городского цикла при 1400 об/мин и АС 100% и ALT 100% увеличение количества миль на галлон в % составляет приблизительно 11%. Аналогичным образом в случае шоссейного цикла увеличение в % составляет приблизительно 11%.
Описанный анализ был также выполнен на двигателе внедорожника объемом 5,3 л со следующими результатами:
Ниже, в табл.1, показано ожидаемое улучшение экономии топлива при Европейском ездовом цикле, показанное на фиг.18 для двигателя объемом 2,0 литра. В табл.1 принимается во внимание кпд коробки передач при передаче крутящего момента, которая оценивается равной приблизительно 90%. Однако эффективность кпд коробки передач должна превышать всего 85%, чтобы реализовать оценочную экономию топлива, если частота вращения вспомогательного агрегата контролируется до приблизительно 2000 об/мин. Генератор для достижения максимальной эффективности постоянно работает при частоте вращения приблизительно 5000 об/мин+. Система может выдержать более низкий кпд коробки передач (<85%), если частота вращения вспомогательного агрегата установлена на уровне приблизительно 850 об/мин. Улучшение, которое обеспечивает система, являющаяся предметом настоящего изобретения, по сравнению с существующими техническими решениями, проиллюстрировано в табл.2.
Кроме того, при езде с постоянной скоростью, которой можно ожидать на шоссе, также достигается значительная экономия топлива. Это показано в табл.3, где кпд передачи ПВАПС согласно настоящему изобретению принимается равным приблизительно 85%. Конечно, кпд варьируется, и варьируется также экономия топлива при постоянной скорости.
Поскольку привод вспомогательных агрегатов осуществляется с по существу постоянной скоростью, такие вспомогательные агрегаты, как компрессор кондиционера и генератор, могут быть сконструированы таким образом, чтобы обеспечивать наибольшую эффективность при выбранной постоянной частоте вращения вместо того, чтобы демонстрировать хорошие рабочие характеристики по всему диапазону частот вращения коленчатого вала двигателя. Кроме того, паразитная мощность гидравлического усилителя рулевого управления может быть сведена с помощью системы согласно настоящему изобретению к минимуму по сравнению с существующими техническими решениями за счет ее использования при более низкой частоте вращения.
Хотя здесь описаны формы изобретения, специалистам в данной области техники должна быть очевидна возможность внесения изменений в конструкцию и соотношение деталей без отступления от существа и объема описанного здесь изобретения.
Реферат
Изобретение относится к машиностроению, в частности к приводам вспомогательных агрегатов со стабилизированной скоростью. Привод содержит планетарную шаровую передачу (1000) с плавным регулированием передаточного числа, шаговый двигатель, червячную передачу. Планетарная шаровая передача имеет планетарные элементы, находящиеся в контакте качения с внутренней и наружной дорожками качения, и может плавно регулировать передаточное число в пределах от приблизительно 0,3 до 1,0. Входной вал передачи соединяется с первичным движителем, таким как коленчатый вал двигателя транспортного средства, приводным ремнем (В1). Передача содержит по меньшей мере один выходной вал, соосный со входным валом. Процессор анализирует частоту вращения коленчатого вала и соответственно регулирует передаточное число, используя для этого шаговый двигатель, соединенный с червячной передачей, для поддержания постоянной частоты вращения на выходе вне зависимости от частоты вращения коленчатого вала. 3 н. и 18 з.п. ф-лы, 18 ил., 3 табл.

Формула
Документы, цитированные в отчёте о поиске
Усовершенствования в позиционных сервосистемах или относящиеся к таким системам
Комментарии