Томография костей в магнитно-резонансной томографии с использованием карты неоднородностей b0 - RU2713806C2
Код документа: RU2713806C2
Чертежи





Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к магнитно-резонансной томографии, в частности, к локализации костной ткани с использованием возмущений магнитного поля B0.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Большое статическое магнитное поле используется сканерами магниторезонансной томографии (МРТ), для выставления ядерных спинов атомов как часть технологии для получения изображений внутри тела пациента. Это Большое статическое магнитное поле называется полем B0.
В ходе МРТ-сканирования радиочастотные (РЧ) импульсы, генерируемые одной или более возбуждающими катушками, вызывают так называемое поле B1. Дополнительно прилагаемые градиентные поля и поле B1 привносят возмущения в эффективное локальное магнитное поле. Затем ядерными спинами испускаются РЧ-сигналы и обнаруживаются одной или более приемными катушками. Эти РЧ-сигналы используют для конструирования МР-изображений. Эти катушками также могут называться антеннами. Кроме того, передающие и приемные катушки также могут быть встроены в одну или более приемопередающих катушек, которые выполняют обе функции. Следует понимать, что использование термина приемопередающая катушка также относится к системам, где отдельно используют передающую и приемную катушки.
МРТ-сканеры пригодны для конструирования изображений срезов или объемов. Срез - это тонкий объем, который имеет толщину лишь один воксел. Воксел - это маленький объемный элемент, на котором МР-сигнал усредняется, и представляет собой разрешение МР-изображения. Воксел в настоящем документе также может называться пикселем (элементом изображения), если рассматривается одиночный срез.
Формирование изображения костной ткани в некоторых случаях осложнено из-за короткого времени T2, затрачиваемого на его получение в этих высокоупорядоченных структурах. Обычно, для визуализации костной ткани используют специальные последовательности импульсов. Например, в журнальной статье Tyler, Damian J., et al. "Magnetic resonance imaging with ultrashort TE (UTE) PULSE sequences: technical considerations". Journal of Magnetic Resonance Imaging 25.2 (2007): 279-289 обсуждается несколько технологий.
Другой подход к визуализации костной ткани состоит в выполнении сегментации магниторезонансных изображений. В Патенте США 7,920,730 B2 раскрыт способ обнаружения костей и костных болезней с использованием МРТ-изображений, который включает в себя: обнаружение и сегментирование границ костей с использованием фоновой информации об интенсивности с границ костей, поученной из МРТ-изображения; и обнаружение костных болезней в сегментированной области изображения.
Способы Диксона в магнитно-резонансной томографии включают в себя семейство технологий для получения отдельных изображений для воды и липидов (жиров). Различные технологии Диксона, такие как, но не ограниченные этим, двухточечные способы Диксона, трехточечные способы Диксона и многоточечные способы Диксона все вместе в настоящей работе называются технологиями или способы Диксона. Терминология для описания технологий Диксона хорошо известна и стала объектом многих обзорных статей и присутствует в стандартных текстах по Магнитно-резонансной томографии. Например, работа «Handbook of МРТ Pulse Sequences» («Руководство по последовательности импульсов МРТ») под авторством Бернштейна и др., опубликованное компанией Elsevier Academic Press в 2004 г., содержит обзор некоторых технологий Диксона на страницах 857-87.
Журнальная статья Koch, Kevin M., et al. "Rapid calculations of susceptibility-induced magnetostatic field perturbations for in vivo magnetic resonance". Physics in medicine и biology 51.24 (2006): 6381 раскрывает расчет приближенного решения уравнения Максвелла для предсказания макроскопической неоднородности поля B0, индуцированного разностями в восприимчивости в живом организме.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает медицинский аппарат, способ работы медицинского аппарат и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Как должно учитываться специалистами в области техники, аспекты настоящего изобретения могут быть воплощены в виде аппарата, способа или компьютерного программного продукта. Следовательно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего в себя встроенную программу, резидентную программу, микрокод, и т.д.) или варианта осуществления, сочетающего в себе программные и аппаратные аспекты, которые в настоящем документе все могут в общем виде называться «цепью», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного в одном или более машиночитаемых носителей, имеющих воплощенный на них исполняемый компьютером код.
Может быть использовано любое сочетание одного или более машиночитаемых носителей. Машиночитаемый носитель может представлять собой носитель сигнала, считываемого компьютером, или носитель памяти, считываемый компьютером. Термин «носитель памяти, считываемый компьютером», как использовано в настоящем документе, охватывает любой материальный носитель памяти, который может хранить команды, исполняемые процессором вычислительного устройства. Носитель памяти, считываемый компьютером, может называться невременным носителем памяти, считываемым компьютером. Носитель памяти, считываемый компьютером, также может называться материальным машиночитаемым носителем. В некоторых вариантах осуществления носитель памяти, считываемый компьютером, также может хранить данные, которые могут быть доступны для процессора вычислительного устройства. Примеры носителей памяти, считываемых компьютером, включают в себя, но не ограничены этим: флоппи-диск, дисковод магнитного жесткого диска, твердотельный жесткий диск, флеш-память, USB-флешка, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин носитель памяти, считываемый компьютером, также относится к различным типам носителей информации, пригодных для доступа со стороны компьютерного устройства через сеть или канал связи. Например, данные могут быть извлечены через модем, через Интернет или через локальную сеть. Исполняемый компьютером код, воплощенный на машиночитаемом носителе, может быть передан, с использованием любого подходящего носителя, включающего в себя, но не ограниченного этим, беспроводную линию, проводную линию, оптоволоконный кабель, РЧ-связь, и т.д., или любое подходящее сочетание вышеописанного.
Носитель сигнала, считываемый компьютером, может включать в себя распространяемый сигнал данных с воплощенным в нем исполняемым компьютером кодом, например, в основной полосе частот или как часть несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включающих в себя, но не ограниченных этим, электромагнитную, оптическую или любое подходящее их сочетание. Носитель сигнала, считываемый компьютером, может представлять собой любой машиночитаемый носитель, который не является носителем памяти, считываемым компьютером, и который может передавать, распространять или переносить программу для использования, или в сочетании с системой, прибором или устройством исполнения команд.
Термин «компьютерная память» или «память» является примером носителя памяти, считываемого компьютером. Компьютерная память представляет собой любую память, которая непосредственно доступна для процессора. Термин «компьютерное запоминающее устройство» или «запоминающее устройство» представляет собой дополнительный пример носителя памяти, считываемого компьютером. Компьютерное запоминающее устройство представляет собой любой энергонезависимый носитель памяти, считываемый компьютером. В некоторых вариантах осуществления компьютерное запоминающее устройство также может представлять собой компьютерную память или наоборот.
Термин «процессор», используемый в настоящем документе, охватывает электронный компонент, который способен исполнять программу или машиноисполняемую команду или исполняемый компьютером код. Ссылки на вычислительное устройство, содержащие «процессор», следует интерпретировать как возможно содержащие более одного процессора или обрабатывающей оперативной памяти. Процессор может представлять собой, например, многоядерный процессор. Процессор также может относиться к совокупности процессоров в одной компьютерной системе, или они могут быть распределены среди нескольких компьютерных систем. Термин вычислительное устройство также следует интерпретировать как возможно относящийся к совокупности или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Компьютерный исполняемый код может исполняться на нескольких процессорах, которые могут находиться в одном и том же вычислительном устройстве, или которые даже могут быть распределены по нескольким вычислительным устройствам.
Компьютерный исполняемый код может содержать машиноисполняемые команды или программу, которая заставляет процессор выполнять аспект настоящего изобретения. Компьютерный исполняемый код для осуществления операций для аспектов настоящего изобретения может быть написан в любом сочетании из одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++, и т.п., и стандартные процедурно-ориентированные языки программирования, такие как язык программирования C или аналогичные языки программирования и скомпилированные в машиноисполняемые команды. В некоторых случаях, исполняемый компьютером код может быть в форме языка высокого уровня или в предварительно скомпилированной форме и может быть использован в сочетании с интерпретирующей программой, которая оперативно генерирует машиноисполняемые команды.
Исполняемый компьютером код может исполняться полностью на пользовательском компьютере, частично на пользовательском компьютере, в виде автономного пакета программ, частично на пользовательском компьютере и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем случае, удаленный компьютер может быть подключен к пользовательскому компьютеру через сеть любого типа, включая локальную сеть (LAN) или глобальную вычислительную сеть (WAN), или может быть реализовано подключение к внешнему компьютеру (например, через Интернет, с использованием Интернет-провайдера).
Аспекты настоящего изобретения описаны со ссылкой на иллюстрации схем последовательности операций способа и/или блок-схем способов, прибора (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Следует понимать, что каждый блок или часть блоков схемы последовательности операций способа, иллюстраций и/или блок-схем, могут быть воплощены в виде команды компьютерной программы в форме компьютерного исполняемого кода, когда это применимо. Дополнительно следует понимать, что когда это не является взаимоисключающим, сочетания блоков на различных схемах последовательности операций способа, иллюстрациях и/или блок-схемах могут быть скомбинированы. Эти команды компьютерной программы могут быть обеспечены для процессора компьютера общего назначения, компьютера специального назначения или другого программируемого прибора для обработки данных, с получением такой машины, в которой команды, исполняемые посредством процессора компьютера или другого программируемого прибор для обработки данных, будут создавать средства для осуществления функций/действий, указанных на схеме последовательности операций способа и/или в блоках или блоках блок-схемы.
Эти команды компьютерной программы также могут быть сохранены в машиночитаемом носителе, который может направлять компьютер, другой программируемый прибор для обработки данных или другие устройства на функционирование определенным образом, так, чтобы команды, сохраненные на машиночитаемом носителе, производили готовое изделие, включающее в себя команды, которые выполняют функцию/действие, указанное на схеме последовательности операций способа и/или в блоке или блоках блок-схемы.
Команды компьютерной программы также могут быть загружены на компьютер, другой программируемый прибор для обработки данных или другие устройства, чтобы вызвать выполнение технологических этапов на компьютере, на другом программируемом приборе или на других устройствах, с получением процесса, выполняемого на компьютере так, чтобы команды, которые исполняются на компьютере или на другом программируемом приборе, обеспечивали процессы для выполнения функций/действий, указанных на схеме последовательности операций способа и/или в блоке или блоках блок-схемы.
Термин «пользовательский интерфейс», используемый в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или системой компьютеров. Термин «пользовательский интерфейс» также может называться «устройством взаимодействия человек-машина». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать ввод данных от оператора, принимаемых компьютером, и может предоставлять вывод данных пользователю от компьютера. Иными словами, пользовательский интерфейс может позволять оператору контролировать или манипулировать компьютером, и интерфейс может позволять компьютеру отображать эффекты контроля или манипуляций со стороны оператора. Дисплей данных или информация на дисплее или графический пользовательский интерфейс являются примерами предоставления информации оператору. Получение данных через клавиатуру, мышь, трекбол, сенсорную панель, ручку координатно-указательного устройства, графический планшет, джойстик, геймпад, веб-камеру, гарнитуру, педали, проводные перчатки, удаленный пульт управления и акселерометр все являются примерами компонентов пользовательского интерфейса, которые позволяют получать информацию или данные от оператора.
Термин «аппаратный интерфейс», используемый в настоящем документе, охватывает интерфейс, который позволяет процессору системы компьютеров взаимодействовать с и/или управлять внешним вычислительным устройством и/или прибором. Аппаратный интерфейс может позволять процессору отправлять управляющие сигналы или команды на внешнее вычислительное устройство и/или прибор. Аппаратный интерфейс также может позволять процессору обмениваться данными с внешним вычислительным устройством и/или прибором. Примеры аппаратного интерфейса включают в себя, но не ограничены этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение беспроводной локальной сети, TCP/IP-соединение, Ethernet-соединение, интерфейс напряжения управления, MIDI-интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
Термин «дисплей» или «устройство отображения», используемый в настоящей работе, охватывает устройство вывода или пользовательский интерфейс, адаптированный для отображения изображений или данных. Дисплей может выводить визуальные, звуковые и или тактильные данные. Примеры дисплея включают в себя, но не ограничены этим: монитор компьютера, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, электронно-лучевую трубку (CRT), запоминающую электронно-лучевую трубку, Bi-стабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный флуоресцентный дисплей (VF), дисплеи на основе светоизлучающего диода (LED), электролюминесцентный дисплей (ELD), плазменные индикаторные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на основе органических светоизлучающих диодов (OLED), проектор и дисплей, устанавливаемый на голове.
Данные магнитного резонанса (МР) заданы здесь как записываемые измерения радиочастотных сигналов, испускаемых атомными спинами, с использованием антенн магнитно-резонансного прибора в ходе сканирования магнитно-резонансной томографии. Данные магнитного резонанса являются примером данных медицинского изображения. Магнитно-резонансное (МР) изображение в настоящей работе задано как реконструирующее двух или трехмерную визуализацию анатомических данных, содержащихся в данных магнитно-резонансной томографии. Эта визуализация может быть выполнена с использованием компьютера.
В одном аспекте изобретение предусматривает медицинский аппарат. Медицинский аппарат содержит систему магнитно-резонансной томографии для получения данных магнитного резонанса от субъекта в зоне визуализации. Система магнитно-резонансной томографии содержит основной магнит для генерирования магнитного поля B0 в зоне визуализации. Магнитное поле B0 также называют основным магнитным полем. B0 или основное магнитное поле является статическим и однородным магнитным полем в зоне визуализации, которое выставляет магнитные спины различных атомов, вследствие чего становится возможным выполнение магнитно-резонансной томографии. Система магнитно-резонансной томографии дополнительно содержит память, содержащую машиноисполняемые команды и команды последовательности импульсов. Система магнитно-резонансной томографии дополнительно содержит процессор для управления медицинским аппаратом. Исполнение машиноисполняемых команд заставляет процессор получать данные магнитного резонанса путем управления системой магнитно-резонансной томографии с помощью команд последовательности импульсов. Исполнение машиноисполняемых команд дополнительно заставляет процессор принимать карту магнитной восприимчивости субъекта. Карта магнитной восприимчивости субъекта может быть принята самыми различными способами. Карта магнитной восприимчивости субъекта, например, может быть сохранена в памяти или в компьютерном запоминающем устройстве процессора. В других примерах карту магнитной восприимчивости субъекта принимают путем ее расчета из различных источников данных, таких как магнитно-резонансное изображение.
Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать карту неоднородности B0 из данных магнитного резонанса. Определение карты неоднородности B0 хорошо известно, и для определения карты неоднородности B0 могут быть предприняты самые различные способы. Например, карта неоднородности B0 часто может быть определена при выполнении технологии магнитно-резонансной томографии Диксона. Преимущество использования технологии Диксона для карты B0 состоит в том, что нерезонансные эффекты, возникающие из жира, который может ухудшить качество карты B0 в естественных условиях, по существу компенсируются реконструкцией Диксона. Обзор общих технологий Диксона можно обнаружить, например, в Руководстве по импульсному режиму МРТ под авторством Бернштейна и др. (см. стр. 857-887). В принципе, может быть использована любая многоградиентная серия эхосигналов, в которой одновременно можно отобрать несколько эхосигналов после одного РЧ-возбуждения, или произвести несколько РЧ-возбуждений, и отобрать один сдвиг эхосигнала. Это часто может быть скомбинировано с различными технологиями или протоколами магнитно-резонансной томографии, связанными с подавлениями сигналов от жира.
Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать возмущение магнитного поля B0 субъекта из оцененной карты магнитной восприимчивости субъекта. Например, если выполняют протокол волюметрической магнитно-резонансной томографии, то такая специфическая для субъекта карта магнитной восприимчивости может быть выведена простым способом сегментации. Простейшая модель может состоять из двух отделений (ткани и воздуха), представленных их соответствующими значениями восприимчивости. Возможны и более сложные модели ткани/восприимчивости. Кроме того, известна напряженность рабочего магнитного поля (B0). Из этого можно непосредственно рассчитать возмущение магнитного поля B0 субъекта из карты магнитной восприимчивости субъекта с использованием известных технологий или электродинамики. Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать остаточное возмущение магнитного поля B0 путем вычитания возмущения магнитного поля B0 субъекта из карты неоднородности B0. При этой операции значение рассчитанного возмущения магнитного поля B0 субъекта вычитают из карты неоднородности B0, и это приводит к остаточному возмущению магнитного поля B0.
Остаточное возмущение магнитного поля B0 представляет собой нарушение магнитного поля B0, которое не может быть принято в расчет в оцененной карте магнитной восприимчивости субъекта. Предполагается, что это возмущение может возникать из костной ткани, которая не дает существенного сигнала в стандартной МРТ, и оно не подвергалось никакой сегментации. Затем исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать карту костей из остаточного возмущения магнитного поля B0. Зная количественно остаточное возмущение магнитного поля B0, можно непосредственно рассчитать распределение костной ткани, которое может привести к этому остаточному возмущению магнитного поля B0. Например, распределение костей в теле субъекта может называться картой костей. Карта костей может быть рассчитана путем решения или итерационного определения распределения костей или карты костей, которое приводит к остаточному возмущению магнитного поля B0.
Медицинский аппарат может обладать, например, преимуществом, при котором расположение костной ткани можно предположить, с использованием обычных или стандартных протоколов магнитно-резонансной томографии.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор реконструировать по меньшей мере часть данных магнитного резонанса в по меньшей мере одно магнитно-резонансное изображение субъекта. Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать модель субъекта путем сегментирования магнитно-резонансного изображения субъекта. Исполнение машиноисполняемых команд дополнительно заставляет процессор конструировать карту магнитно-резонансной восприимчивости субъекта из модели субъекта. Конструирование карты восприимчивости субъекта можно осуществлять самыми различными способами. В одном случае простое магнитно-резонансное изображение, например, изображение протонной плотности, можно использовать для применения модели, которая включает в себя предположения о распределении магнитной восприимчивости по телу субъекта. Например, модель может соответствовать данным магнитного резонанса, которые обеспечивают данные или предсказание типа распределения ткани по телу субъекта. Знание пространственной зависимости конкретных типов ткани позволяет непосредственно конструировать карту магнитной восприимчивости субъекта.
В одном примере, команды последовательности импульсов предназначены для одиночного протокола магнитно-резонансной томографии. В других примерах, команды последовательности импульсов могут быть предназначены для выполнения более одного протокола магнитно-резонансной томографии.
В другом варианте осуществления команды последовательности импульсов содержат команды для получения данных магнитно-резонансной томографии согласно протоколу Диксона для магнитно-резонансной томографии. Упомянутое по меньшей мере одно магнитно-резонансное изображение субъекта содержит по меньшей мере одно изображение жиров и по меньшей мере одно изображение воды. Модель субъекта содержит часть, описывающую жиры, и часть, описывающую воду. Карта магнитной восприимчивости субъекта рассчитывается путем добавления или присвоения пространственного вклада магнитно-резонансной восприимчивости, исходя из части, описывающей жиры, и исходя из части, описывающей воду. Магнитная восприимчивость жира и воды в теле субъекта может быть известна.
В другом варианте осуществления расчет модели субъекта содержит определение пространственной зависимости воды и жира в теле субъекта с использованием упомянутого по меньшей мере одного изображения жиров и упомянутого по меньшей мере одного изображения воды. Пространственная зависимость воды и жира может быть выражена в различных формах. Например, пространственная зависимость воды может представлять собой одно картирование, а пространственная зависимость жира может представлять собой другое картирование. В других примерах пространственная зависимость выражена прямо пропорционально.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать пространственное распределение костей путем приложения обратной функции Грина к остаточному возмущению магнитного поля B0. Карта костей по меньшей мере частично рассчитывается из пространственного распределения костей.
Обратная функция Грина в некоторых примерах может представлять собой обратную дипольную функцию Грина. Обратная функция Грина также может называться деконволюцией Грина.
В некоторых случаях пространственное распределение костей представляет собой карту костей. В других случаях пространственное распределение костей используют при расчете карты костей.
В другом варианте осуществления исполнение команд дополнительно заставляет процессор сначала оценивать пространственное распределение костей. Исполнение машиноисполняемых команд дополнительно заставляет процессор итерационно уточнять пространственное распределение костей путем приложения функции Грина для пространственного распределения костей, а затем сопоставлять полученное оцененное возмущение магнитного поля B0 с остаточным возмущением магнитного поля B0 в алгоритме оптимизации. Алгоритм оптимизации может затем добавлять или удалять небольшие части костной ткани из пространственного распределения костей. Последующее пространственное распределение костей можно затем использовать для расчета нового оцененного возмущения магнитного поля B0. Этот процесс затем повторяют до достижения сходимости оцененного возмущения магнитного поля B0 в заданном диапазоне значений с остаточным возмущением магнитного поля B0.
Карту костей по меньшей мере частично рассчитывают из пространственного распределения костей. Вместо использования обратной функции Грина, используют начальное приближение, при котором костная ткань присутствует в форме предварительного пространственного распределения костей, а затем, с использованием прямой функции Грина, рассчитывают остаточное возмущение магнитного поля B0. Если полученное рассчитанное остаточное возмущение магнитного поля B0 находится в пределах заданного диапазона или критерия фактического остаточного возмущения магнитного поля B0, действие алгоритма прекращается. Если это не достигнуто, то пространственное расположение костной ткани необходимо отрегулировать, чтобы попытаться откорректировать пространственное распределение костей. Это можно выполнить итерационно, до нахождения удовлетворительного решения для пространственного распределения костей.
В другом варианте осуществления исполнение команд дополнительно заставляет процессор рассчитывать карту костей путем сегментирования упомянутого по меньшей мере одного магнитно-резонансного изображения субъекта. Расчет сегментированного изображения костей содержит взвешивание сегментов, с использованием пространственного распределения костей. В этом варианте осуществления карта костей непосредственно не рассчитывается из пространственного распределения костей, но пространственное распределение костей используют для взвешивания сегментов изображения. Это, в частности, может быть применимо при нанесении на карту данных расположения костной ткани. Например, кость обычно имеет другие ткани в контакте с ней. Эти ткани могут быть видны на изображении магнитно-резонансной томографии. Сложность состоит в том, что в теле субъекта могут присутствовать воздушные полости, пузырьки или другие структуры, которые имеют области, которые не испускают очень сильного магнитно-резонансного сигнала, который отображается. Использование пространственного распределения костей для выполнения взвешивания в ходе сегментирования может снизить вероятность того, что область выбрана ошибочно как содержащая костную ткань.
В другом варианте осуществления исполнение команд дополнительно заставляет процессор рассчитывать карту костей путем сегментирования упомянутого по меньшей мере одного магнитно-резонансного изображения субъекта и корректировать карту костей с использованием пространственного распределения костей. В этом примере карту костей первоначально рассчитывают путем сегментирования магнитно-резонансного изображения субъекта. Границы или другие местоположения на карте костей затем корректируют, с использованием пространственного распределения костей.
В другом варианте осуществления исполнение команд дополнительно заставляет процессор рассчитывать карту ослабления излучения с использованием карты костей и модели субъекта. Карта ослабления излучения, используемая здесь, представляет собой трехмерное распределение ткани, которое может быть использовано для расчета ослабления ионизирующего излучения, проходящего через тело субъекта. Комбинирование модели субъекта и карты костей может привести к более точной карте ослабления излучения. Это может быть полезным, например, в ходе планирования облучения или в других технологии радионуклидной медицинской визуализации, таких как позитронно-эмиссионная томография или однофотонная эмиссионная томография.
В другом варианте осуществления медицинская система дополнительно содержит систему радионуклидной медицинской визуализации для получения радионуклидного медицинского изображения по меньшей мере зоны визуализации. Исполнение машиноисполняемых команд дополнительно заставляет процессор получать данные радионуклидной медицинской визуализации из зоны визуализации. Исполнение машиноисполняемых команд дополнительно заставляет процессор реконструировать радионуклидное медицинское изображение с использованием данных радионуклидной медицинской визуализации и карты ослабления излучения. Этот вариант осуществления может быть выгодным, поскольку субъект может иметь карту ослабления излучения, полученную или определенную, без перемещения техники для радионуклидной медицинской визуализации.
Примеры системы радионуклидной медицинской визуализации включают в себя систему позитронно-эмиссионной томографии или систему однофотонной эмиссионной томографии.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор принимать план лечения. Исполнение машиноисполняемых команд дополнительно заставляет процессор генерировать команды управления системой лучевой терапии с использованием плана лечения и карты ослабления излучения.
В другом варианте осуществления медицинский аппарат дополнительно содержит систему лучевой терапии для облучения целевого объекта в зоне визуализации. Исполнение машиноисполняемых команд дополнительно заставляет процессор управлять системой лучевой терапии с помощью команд управления системой лучевой терапии.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор получать карту фонового магнитного поля B0, описывающую магнитное поле B0 в зоне визуализации. Исполнение машиноисполняемых команд дополнительно заставляет процессор корректировать карту неоднородности B0 с помощью карты фонового магнитного поля B0 перед расчетом остаточного возмущения магнитного поля B0. Этот вариант осуществления может быть выгодным при наличии крупных неоднородностей в магнитном поле B0, присущем системе магнитно-резонансной томографии. Он также может быть применимым в границах зоны визуализации, где магнитное поле B0 является более неоднородным.
Фоновое магнитное поле B0 может быть получено различными способами. Информация о распределении основного магнитного поля при отсутствии пациента на месте может быть получена, например, из следующего, но не ограничиваясь этим:
- компенсационного графика, измеренного в ходе установки системы, или
- некоторых специальных измерений на фантоме, с получением карты B0 (с использованием сферы, заполненной водой), или
- других способов измерения поля с использованием зондов для измерения поля.
В другом аспекте изобретение предусматривает способ работы медицинского аппарата. Медицинский аппарат содержит систему магнитно-резонансной томографии для приема данных магнитного резонанса от субъекта в зоне визуализации. Система магнитно-резонансной томографии содержит основной магнит для генерирования магнитного поля B0 в зоне визуализации. Способ содержит этап получения данных магнитного резонанса путем управления системой магнитно-резонансной томографии с помощью команд последовательности импульсов. Способ дополнительно содержит прием карты магнитной восприимчивости субъекта. Способ дополнительно содержит расчет карты неоднородности B0 из данных магнитного резонанса. Способ дополнительно содержит расчет возмущения магнитного поля B0 субъекта из карты магнитной восприимчивости субъекта. Способ дополнительно содержит расчет остаточного возмущения магнитного поля B0 путем вычитания возмущения магнитного поля B0 субъекта из карты неоднородности B0. Способ дополнительно содержит расчет карты костей из остаточного возмущения магнитного поля B0.
В другом аспекте изобретение предусматривает компьютерный программный продукт, содержащий машиноисполняемые команды для исполнения процессором управления медицинским аппаратом. Медицинский аппарат содержит систему магнитно-резонансной томографии для получения данных магнитного резонанса от субъекта в зоне визуализации. Система магнитно-резонансной томографии содержит основной магнит для генерирования магнитного поля B0 в зоне визуализации. Исполнение машиноисполняемых команд заставляет процессор получать данные магнитного резонанса путем управления системой магнитно-резонансной томографии с помощью команд последовательности импульсов. Исполнение машиноисполняемых команд дополнительно заставляет процессор принимать карту магнитной восприимчивости субъекта. Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать карту неоднородности B0 из данных магнитного резонанса.
Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать возмущение магнитного поля B0 субъекта из карты магнитной восприимчивости субъекта. Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать остаточное возмущение магнитного поля B0 путем вычитания возмущения магнитного поля B0 субъекта из карты неоднородности B0. Исполнение машиноисполняемых команд дополнительно заставляет процессор рассчитывать карту костей из остаточного возмущения магнитного поля B0.
Следует понимать, что один или более вышеупомянутых вариантов осуществления изобретения могут быть скомбинированы до тех пор, пока скомбинированные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем, предпочтительные варианты осуществления изобретения будут описаны лишь в качестве примера, и со ссылкой на чертежи, на которых:
Фиг. 1 иллюстрирует пример медицинского аппарата;
Фиг. 2 показывает схему последовательности операций способа, которая иллюстрирует способ работы медицинского аппарата по Фиг. 1;
Фиг. 3 показывает схему последовательности операций способа, которая дополнительно иллюстрирует пример способа;
Фиг. 4 показывает изображения из моделирования;
Фиг. 5 иллюстрирует дополнительно пример медицинского аппарата; и
Фиг. 6 показывает схему последовательности операций способа, которая иллюстрирует способ работы медицинского аппарата по Фиг. 5.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Одинаковые пронумерованные элементы на этих Фигурах являются эквивалентными элементами, либо выполняют одну и ту же функцию. Элементы, которые обсуждались ранее, не обязательно будут обсуждаться на последующих Фигурах, если их функция эквивалентна.
Фиг. 1 показывает пример медицинского аппарата 100. Медицинский аппарат 100 содержит систему магнитно-резонансной томографии 102. Система 102 магнитно-резонансной томографии содержит магнит 104. Магнит 104 представляет собой магнит 104 сверхпроводящего цилиндрического типа с каналом 106, проходящим через него. Также возможно использование различных типов магнитов; например, также можно использовать, как разделенный цилиндрический магнит, так и так называемый открытый магнит. Разделенный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат был разделен на две секции, позволяющие осуществлять доступ к изо-плоскости магнита, и такие магниты могут быть использованы, например, в сочетании с терапией с использованием пучка заряженных частиц. Открытый магнит имеет две секции магнита, расположенный одна выше другой, с пространством между ними, которое достаточно велико для вмещения субъекта: расположение двух областей секций аналогично расположению в катушке Гельмгольца. Открытые магниты популярны, поскольку субъект меньше стеснен. Внутри криостата цилиндрического магнита, имеется совокупность сверхпроводящих катушек. В канале 106 цилиндрического магнита 104 имеется зона 108 визуализации, где магнитное поле достаточно сильное и однородное для выполнения магнитно-резонансной томографии.
В канале 106 магнита также имеется комплект градиентных катушек магнитного поля, который используют для получения данных магнитного резонанса для пространственного кодирования магнитных спинов в зоне 108 визуализации магнита 104. Градиентные катушки 110 магнитного поля подключены к источнику электропитания 112 градиентных катушек магнитного поля. Предполагается, что градиентные катушки 110 магнитного поля являются репрезентативными. Обычно градиентные катушки 110 магнитного поля содержат три отдельных комплекта катушек для пространственного кодирования по трем ортогональным пространственным направлениям. Источник электропитания магнитного поля подает ток к градиентным катушкам магнитного поля. Ток, подаваемый к градиентным катушкам 110 магнитного поля, регулируют в зависимости от времени, и он может быть наклонным или импульсным.
Рядом с зоной 108 визуализации находится радиочастотная катушка 114 для управления ориентацией магнитных спинов в зоне 108 визуализации и для приема радиопередачи от спинов также в зоне 108 визуализации. Радиочастотная антенна может содержать несколько элементов катушки. Радиочастотная антенна также может называться каналом или антенной. Радиочастотная катушка 114 подключена к радиочастотному приемопередатчику 116. Радиочастотная катушка 114 и радиочастотный приемопередатчик 116 могут быть заменены отдельными передающими и принимающими катушками и отдельным передатчиком и приемником. Следует понимать, что радиочастотная катушка 114 и радиочастотный приемопередатчик 116 являются репрезентативными. Предполагается также, что радиочастотная катушка 114 представляет собой специальную передающую антенну и специальную принимающую антенну. Аналогично, приемопередатчик 116 также может представлять отдельный передатчик и приемник. Радиочастотная катушка 114 также может иметь несколько принимающих/передающих элементов, и радиочастотный приемопередатчик 116 может иметь несколько принимающих/передающих каналы.
В канале 106 магнита 104 имеется опора 120 для субъекта, которая прикреплена к не обязательному приводу 122, который может перемещать опору для субъекта и субъекта 118 через зону 108 визуализации. Видно, что приемопередатчик 116, источник электропитания 112 градиентных катушек магнитного поля и привод 122 подключены к аппаратному интерфейсу 128 системы компьютеров 126.
Состав компьютерного запоминающего устройства 134 и компьютерной памяти 136 может быть взаимозаменяемым. В некоторых примерах состав компьютерного запоминающего устройства 134 может быть дублирован в компьютерной памяти 136.
Компьютерное запоминающее устройство 134 показано как содержащее команды 140 последовательности импульсов. Команды 140 последовательности импульсов представляют собой команды или данные, которые могут быть преобразованы в команды для создания команд для управления системой 102 магнитно-резонансной томографии, для получения данных магнитного резонанса. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее данные 142 магнитного резонанса, которые были получены с использованием команды 140 последовательности импульсов. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее карту 144 магнитной восприимчивости субъекта, которая была получена. Она могла быть, например, рассчитана процессором 130 из других данных, или она могла быть введена или получена через сеть или другое устройство хранения. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее карту 146 неоднородности B0, которая была рассчитана из данных 142 магнитного резонанса. В одном конкретном примере команды 140 последовательности импульсов представляют собой команды последовательности импульсов Диксона, а карту 146 неоднородности B0 рассчитывают в процессе обработки данных 142 магнитного резонанса согласно протоколу магнитного резонанса Диксона. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее возмущение 148 магнитного поля субъекта B0. Возмущение магнитного поля B0 субъекта было рассчитано из карты 144 магнитной восприимчивости субъекта. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее остаточное возмущение 150 магнитного поля B0, которое было рассчитано путем вычитания возмущения 148 магнитного поля B0 субъекта из карты 146 неоднородности B0. Компьютерное запоминающее устройство дополнительно показано как содержащее карту 152 костей, которое было рассчитано из остаточного возмущения 150 магнитного поля B0.
Компьютерная память 136 дополнительно показана как содержащая управляющий модуль 160. Управляющий модуль 160 содержит команды, которые позволяют процессору 130 контролировать и управлять всем медицинским аппаратом 100, включающим в себя систему 102 магнитно-резонансной томографии. Например, управляющий модуль 160 может позволить процессору 130 использовать команды 140 последовательности импульсов получать данные 142 магнитного резонанса. Компьютерная память 136 дополнительно показана как содержащая модуль 162 реконструкции изображения. Модуль 162 реконструкции изображения содержит компьютерный код или команды, которые позволяют процессору 130 реконструировать и извлекать данные из данных 142 магнитного резонанса. Это может включать в себя обработку данных 142 магнитного резонанса для различных протоколов визуализации и выполнение преобразований Фурье.
Компьютерная память 136 показана как содержащая модуль 164 дифференциальных уравнений, который позволяет процессору 130 применять различные уравнения сферического и дифференциального типа для обработки данных. Например, модуль 164 дифференциальных уравнений может позволить процессору 130 обрабатывать различные данные согласно функциям Грина или обратным функциям Грина. Компьютерная память 136 дополнительно показана как содержащая модуль 166 обработки изображений. Модуль 166 обработки изображений позволяет процессору 130 выполнять технологии обработки изображений для модификации изображений, а также выполнять различные математические операции на матрицах и крупных банках данных. Содержание компьютерного запоминающего устройства 134 и компьютерной памяти 136 может быть дублировано друг в друге или в различных объектах, показанных на Фигуре, которые могут быть переключены или сохранены в других объектах.
Фиг. 2 показывает последовательность операций, которая иллюстрирует способ работы медицинского аппарата 100 с Фиг. 1. Сначала, на этапе 200 данные 142 магнитного резонанса получают путем управления системой 102 магнитно-резонансной томографии с помощью команд последовательности импульсов 140. Затем, на этапе 202 принимают карту 144 магнитной восприимчивости субъекта. Затем, на этапе 204 карту 146 неоднородности B0 рассчитывают из данных 142 магнитного резонанса. Затем, на этапе 206 из карты 144 магнитной восприимчивости субъекта рассчитывают возмущение 148 магнитного поля B0 субъекта. На этапе 208 остаточное возмущение 150 магнитного поля B0 рассчитывают путем вычитания возмущения 148 магнитного поля B0 субъекта из карты 146 неоднородности B0. Наконец, на этапе 210 из остаточного возмущения 150 магнитного поля B0 рассчитывают карту 152 костей. В некоторых примерах карта костей может быть рассчитана непосредственно из остаточного возмущения магнитного поля B0, например, с использованием обратной функции Грина. В других случаях, карта костей может быть рассчитана в сочетании с различными обработками изображения или технологиями сегментирования также в ходе итерационной процедуры, в которой также исходно оцененная карта восприимчивости тела может быть подвергнута оптимизации. Возмущение магнитного поля B0 субъекта и остаточное возмущение магнитного поля B0 оба представляют собой средства нанесения на карту комплекта трехмерных данных.
МРТ обычно бывает непригодной для выявления кортикальной кости, поскольку твердые структуры демонстрируют очень короткое T2s. Однако, эти виды твердых тканей, даже если они МР-невидимы, влияют на МРТ-сигнал поблизости от них через их магнитную восприимчивость. Соответствующий магнитный диполь оказывает эффективное влияние на магнитное поле также в областях, достаточно удаленных от фактического источника восприимчивости.
Поэтому, в примерах может быть использована измеренная карта B0, некоторая информация об объекте и подходящая «инверсии диполя» для локализации кортикальной кости (или материала, который отличается в восприимчивости от ткани, обогащенной водой). Это может быть очень полезным для локализации кортикальной кости в плане лучевой терапии или для поддержки оценки карты ослабления ПЭТ, поскольку измеренные карты B0 могут быть получены в виде побочного продукта сканирования Диксона.
Имеется потребность в использовании данных МРТ для поддержки плана лучевой терапии. При этой процедуре знание местоположения костной ткани является важным, поскольку кость демонстрирует более сильное поглощение излучения, чем обычная ткань. Одни и те же меры для корректировки ослабления в ПЭТ были предприняты для улучшения реконструкции изображения ПЭТ. Для идентификации костей, можно использовать универсальное испытательное оборудование (UTE), для частичной визуализации коротких T2-компонентов, которые могут быть присвоены кости. Однако текущая технология UTE неспособна обеспечить полную информацию о жесткой, кальцинированной кости, т.е., о кортикальной кости, которая содержит лишь немного протонов, выявляемых с помощью МРТ. Для выполнения UTE было предложено формирование изображений методом Диксоном. Оно позволяет разделять воду и жир, поскольку последний является важным компонентом костного мозга. Таким путем обеспечивается дополнительная информация для опосредованной идентификации костной ткани. Тем не менее, во избежание возможных двусмысленностей еще требуются многие знания и способы моделирования анатомии согласно уровню техники. Например, жир присутствует не только в костном мозге, его можно обнаружить где угодно в теле, что усложняет обработку изображения, необходимую для опосредованной локализации кости. Такой способ может быть неудачным, если у конкретного пациента анатомическое строение существенно отличается от используемой анатомической модели.
В некоторых примерах может быть вновь использована карта поля, полученная из визуализации методом Диксона или из любого другого источника. Даже если костная ткань не вносит вклад в измеренный МР-сигнал, из-за слишком длительных выбранных оценок технических характеристик TE, ее свойства восприимчивости будут влиять на поле B0 в окружающей среде. Это влияние видно при использовании МР-резонанса, проходящего через воду или жир, имеющийся вокруг костной ткани. Следует отметить, что в дальнейшем будет рассматриваться трехмерная карта B0. Измеренная карта B0 имеет фактически два основных компонента:
B0измер(r)=B0вакуум(r)+B0воспр. тела(r). [1]
B0 вакуум(r) может быть оцененено во время установки системы или из коррекционных графиков или других измерений и представляет основное поле неоднородности в отсутствие пациента. В качестве альтернативы, можно предположить, что эффект плохой коррекции пространственно сглажен и может быть удален путем подходящей аппроксимации или смещающей коррекции. Можно предположить, что эта операция будет успешной, кода ее можно получить из измеренной карты B0, т.е., B'0изм(r), которая преобладает во вкладах в восприимчивость тела:
B'0 изм(r)=B0 воспр. тела(r). [2]
Важно отметить, что влияние восприимчивости тела на индуцированное основное поле неоднородности (B0 воспр_тела(r)) может быть предсказано подходящим моделированием.
B0 воспр_тела(r) может быть аппроксимировано как конволюция (*) распределения S(r) восприимчивости тела с функцией (G(r)) диполя Грина.
B0 body_susc(r)=S(r) * G(r) [3]
с

Различные типы тканей обладают различными значениями восприимчивости (Xвода=-9,2 частей на миллион, Xжир =-9,7 частей на миллион, Xкость=-12,8 частей на миллион, Xвоздух=0 частей на миллион (числа могут быть неточными)). Восприимчивость воды и жира почти идентичны, но восприимчивость воздуха и кости отличаются существенно. Так, исходя из трехмерной модели изображения по Диксону вода/жир (величина) и подходящего выбора граничных значений, можно сформировать простую трехмерную карту восприимчивости тела. Эта X-карта задает для каждого пикселя соответствующее значение восприимчивости воды, жира, либо воздуха. Карта не содержит кость, поскольку она не дает сигнал по величине изображения. Этот способ может быть упрощен, из-за схожести значений восприимчивости воды и жира: каждый воксел в теле дает среднее значение восприимчивости (вода/жир), пока это воздух (X=0). Вокселы снаружи также заданы на уровне нуля. Этот способ состоит в создании простой бинарной маски для тела, которую можно использовать для оценки/моделирования восприимчивости вклада в индуцированное поле тела (B0 моделир. воспр. тела(r)). Из-за того, что кость не рассматривалась при моделировании, карта разности
B0 разн(r)=B'0 изм(r) - B0 моделир. воспр. тела(r) [4]
преобладает за счет вкладов в поле со стороны остальной кости. Пространственный вклад кости (Bone(r)), может быть смоделирован уравнением
B0 дифф(r)=Bone(r) * G(r) [5],
может быть получен путем инвертирования уравнения 5.
Bone (r)=B0 дифф(r) * G-1(r) [6]
При использовании подходящей систематизации, это уравнение может быть решено в области Фурье, с использованием конечного преобразования Фурье или лучше алгебраическим способом решения задачи в уравнении [6] в форме векторной записи. Задачу затем можно решить путем подходящего псевдо-инверсного или, если это не представляется возможным, путем итеративного метода.
Трехмерная карта B0 может быть получена из трехмерного сканирования Диксона. Статические фоновые градиенты (B0 вакуум) удаляют из карты, а подходящую коррекцию фильтрования/смещения осуществляют поверх, для отделения вкладов восприимчивости преобладающего поля (см. схему последовательности операций способа ниже на Фиг.3). При использовании моделирования прямой восприимчивости модели на основе воды и расчете разности для измеренной карты деконволюция Грина дает местоположение тех компонентов, которые не внесли вклад в МР-сигнал в измерении МРТ (см. Фиг.4. ниже). Таким путем может быть локализована костная ткань.
Фиг. 3 показывает дополнительную схему последовательности операций способа, который иллюстрирует способ расчета карты костей или распределения. На Фиг. 3 способ имеет два ввода; они представляют собой карту 146 неоднородности B0 и карту 144 магнитной восприимчивости субъекта, которая помечена как S-карта. Схема последовательности операций способа на Фиг. 3 показывает необязательную обработку карты неоднородности B0. Если имеется известная карта фона B0, на которой отсутствует субъект, то карту B0 304 фона можно затем вычесть для расчета откорректированной карты 306 неоднородности B0. Если этап 304 не выполнен, то карту 146 неоднородности B0 можно использовать вместо откорректированной карты 306 неоднородности B0. Этап 304 является необязательным, если фоновая неоднородность незначительна. Схема последовательности операций способа на Фиг. 3 дополнительно показывает, что карту 144 магнитной восприимчивости субъекта обрабатывают посредством конволюции 308 Грина для расчета возмущения 148 магнитного поля B0 субъекта. Схема последовательности операций способа дополнительно показывает, что возмущение 148 магнитного поля B0 субъекта вычитают 208 из откорректированной карты 306 неоднородности B0. Это приводит к остаточному возмущению 150 магнитного поля B0. Схема последовательности операций способа тогда показывает, что карту 152 костей рассчитывают из остаточного возмущения магнитного поля B0, с использованием деконволюции 210 Грина.
Фиг.3. показывает схему последовательности операций способа согласно основной идее способа выявления кости. Вводимые данные представляют собой измеренную карту B0 и карту S ткани, которую можно вывести из трехмерной величины МРТ данных. Первая может быть откорректирована для случая отсутствия восприимчивости, индуцированной телом, что осуществляется с использованием сведений согласно уровню техники и т.д., тогда как S можно использовать для осуществления оценки восприимчивости. Разности измеренных и смоделированных карт B0 отражают вклады невидимой ткани, которая не была рассмотрена при моделировании. С помощью подходящей деконволюции, соответствующий сигнал может быть локализован.
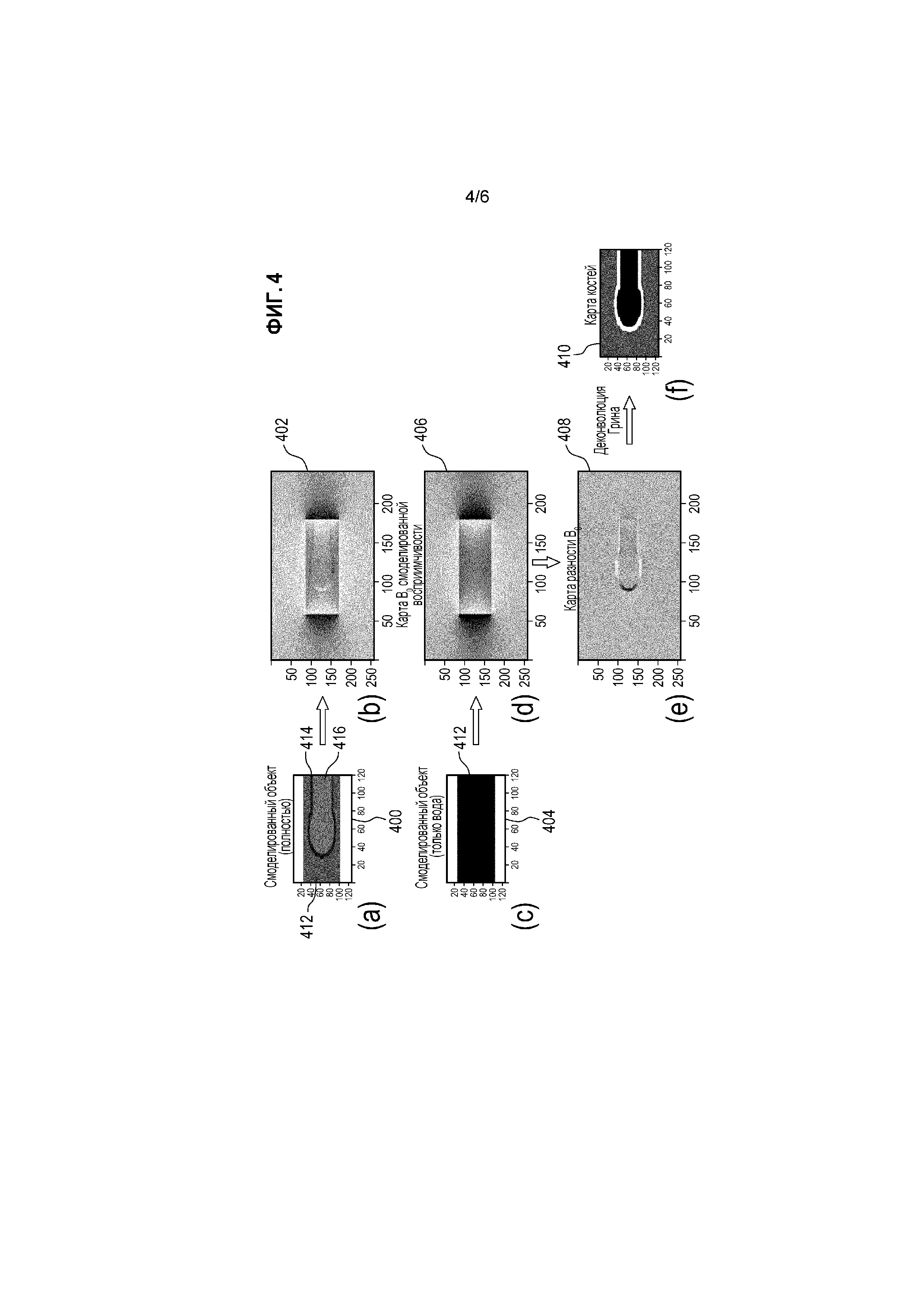
Фиг. 4 показывает серию моделирований, которые были использованы для испытания способа расчета карты 410 костей. Прямоугольник 400 показывает смоделированный объект, который состоит из воды 412, причем кость внутри состоит из слоя кортикальной кости 414, которая заключает в себе костный мозг 416. Объект на изображении 400 был затем использован для расчета карты 402 восприимчивости, индуцированной телом. Это было сделано для имитации результата измерения B0. Для простоты на изображении 404 показана ванна 412 с водой. Это было использовано для расчета карты восприимчивости, индуцированной телом только для воды 412. Этот результат показан на Фиг. 406. Это функционирует как эталонное магнитно-резонансное изображение. Разность между изображениями 402 и 406 показаны в виде карты B0 408 разности. Карта B0 408 разности аналогична остаточному возмущению 150 магнитного поля B0 по Фиг. 1. Тогда Фиг. 4 показывает, что карта 410 костей сконструирована путем выполнения деконволюции Грина на карте 408 разности B0.
Фиг. 5 дополнительно показывает пример медицинского аппарата 500. Пример, показанный на Фиг. 5, очень похож на пример, показанный на Фиг. 1, с несколькими дополнениями. В этом примере, команды 140 последовательности импульсов приведены для протокола Диксона для магнитно-резонансной томографии. Данные 142 магнитного резонанса обрабатывают с получением карты 146 неоднородности B0 и изображения жиров 502 и изображения воды 504. Изображение воды 504 и изображение жиров 502 используют для конструирования модели субъекта 506. Модель 506 субъекта имеет пространственную зависимость воды и жира в теле субъекта как функция от местоположения. Процессор затем использует модель 506 субъекта для расчета карты 144 магнитной восприимчивости субъекта путем присвоения пространственного вклада в магнитную восприимчивость от жира и воды, как задано в модели 506 субъекта.
Фиг. 6 показывает схему последовательности операций способа, который иллюстрирует способ работы медицинского аппарата 500 с Фиг. 5. Способ, показанный на Фиг. 6, аналогичен способу, показанному на Фиг. 2. Этап номер 202 на Фиг. 2 был заменен этапами 600, 602 и 604. Способ начинается с этапа 200, как идентичного этапу с Фиг. 2. Затем, на этапе 600 данные 142 магнитного резонанса реконструируют, с получением изображения жиров 502 и изображения воды 504. Это осуществляют с помощью следующего протокола Диксона для магнитно-резонансной томографии. При следовании этому протоколу, также выполняют этап 204. На этапе 204 также рассчитывают карту 146 неоднородности B0.
Затем, на этапе 602 модель 506 субъекта рассчитывают путем сегментирования изображения жиров 502 и изображения воды 504. Модель 506 субъекта также может быть рассчитана с использованием изображения жиров 502 и изображения воды 504 без сегментирования, просто с использованием рассчитанного процентного содержания жира и воды в каждом вокселе. На этапе 604 карту 144 магнитной восприимчивости субъекта рассчитывают из модели субъекта 506. Этап 604 эквивалентен обеспечению карты магнитной восприимчивости субъекта на этапе 202. Затем, после выполнения этапа 604 способ переходит к этапам 206, 208 и 210, которые идентичны этапам, показанным на Фиг. 2.
В другом аспекте можно скомбинировать способ локализации кортикальной кости с любым видом модели, основанной на сегментировании. Здесь рассматриваются измеренные МР-данные, предпочтительно упомянутый комплект данных с разрешением по данным вода/жир согласно методу Диксона, который кроме того позволяет генерировать карту B0. карту B0 испытывают согласно упомянутому способу для оценки местоположения и формы кости и т.д., благодаря «количественному» картографированию восприимчивости. Информацию о местоположении и форме кости используют для улучшения модели на основе сегментирования. Это может быть достигнуто следующим способом:
Исходя из данных по воде, жиру или тех и других может быть выполнено сегментирование, которое также может включать в себя использование подходящим образом подготовленных моделей тела, с различными уровнями подробностей (органов, костей, возможных имплантов, и т.д.), которые могут быть подобраны для реальной анатомии пациента. В результате этого сегментирования может быть автоматически аннотирована обработка различных типов ткани с их соответствующими значениями восприимчивости. При использовании прямого моделирования исходя из обнаруженных результатов аннотированного сегментирования, может быть оценена смоделированная карта B0, которая может быть сопоставлена с измеренной картой (экспериментальной), после применения некоторых исправлений, связанных со статическим основным магнитным полем. Исходя из остаточных разностей между оцененными и экспериментальными картами B0, результаты сегментирования могут быть подтверждены или улучшены.
Для усовершенствования итерационной процедуры рассматривается использование подходящей штрафной функции (эта функция может быть функцией на основе L2-нормы, или также может содержать редкие аспекты, использующие L1- или L0-норму). В этой функции, соответствующая задача может быть просто изложена, как в следующем уравнении (без потерь универсальности):
Segm(r): argmin { |W - w(Segm)|²+|W - f(Segm)|²+α |Segm(r) * G(r) - B0meas/corr|ϕ } [7]
В этой формуле Segm(r) означает результат сегментирования, или точнее, карту, сгенерированную из результата сегментирования (содержащего различные значения восприимчивости для различных классов тканей), который подвергают минимизации по трем приведенным свободным членам. Операторы w() и f() извлекают соответствующие множества, относящиеся к воде и жиру, из МР-изображения Диксона, с использованием результата сегментирования, тогда как W и F представляют собой, соответственно, измеренные изображения для воды и жиров и измеренное основное поле, откорректированное по карте B0/корр. Первый два свободных члена L2 показывают, в очень простой форме, задачу общего сегментирования, с обнаружением достаточной согласованности между моделями частей, содержащих воду и жир, и соответствующими данными изображения. Свободные члены w(Segm) и f(Segm) образуют два важных компонента всего результата сегментирования, которые являются элементами Segm, который подтверждается также как вид карты восприимчивости ткани. Использованием конволюции карты восприимчивости ткани с функцией диполя Грина приводит к карте индуцированной восприимчивости ткани, которая должна соответствовать откорректированным B0-данным экспериментального статического поля, которые корректируют с помощью параметра регуляризации α.
Использование задачи, сформулированной в уравнении 7 или использование аналогичной задачи способно улучшить результаты сегментирования. Внедрение подходящих сведений о возможном присутствии другого материала с другими значениями восприимчивости (такого как металлические или керамические импланты), который также не вызывает непосредственного МР-видимого сигнала в магнитном резонансе, может дополнительно способствовать локализации этих объектов внутри тела, также с помощью модели, основанной на сегментировании (включающей в себя также сведения согласно уровню техники о форме и составе).
Тогда как изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такую иллюстрацию и описание следует рассматривать лишь как иллюстративную или примерную, а не ограничивающую; изобретение не ограничено раскрытыми вариантами осуществления.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает наличия других элементов или этапов, а единственное число не исключает наличия множественности. Одиночный процессор или другой блок может выполнять функции нескольких объектов, изложенных в формуле изобретения. Сам факт, что определенные меры изложены в отличных друг от друга зависимых пунктах формулы изобретения, не означает, что нельзя успешно использовать сочетание этих мер. Компьютерная программа может быть сохранена/распространена на подходящем носителе, таком как оптическая память или твердотельный носитель, поставляемый вместе или как часть другой аппаратуры, но также может быть распространена в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Никакие ссылочные обозначения в формуле изобретения не следует рассматривать как ограничивающие объем.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
100 медицинский аппарат
102 магнитно-резонансная система
104 магнит
106 канал магнита
108 зона измерения или зона визуализации
110 градиентные катушки магнитного поля
112 источник электропитания градиентных катушек магнитного поля
114 радиочастотная катушка
116 приемопередатчик
118 субъект
120 опора для субъекта
122 привод
125 срезы
126 система компьютеров
128 аппаратный интерфейс
130 процессор
132 пользовательский интерфейс
134 компьютерное запоминающее устройство
136 компьютерная память
140 команды последовательности импульсов
142 данные магнитного резонанса
144 карта магнитной восприимчивости субъекта
146 карта неоднородности B0
148 возмущение магнитного поля B0 субъекта
150 остаточное возмущение магнитного поля B0
152 карта костей
160 управляющий модуль
162 модуль реконструкции изображения
164 модуль дифференциальных уравнений
166 модуль обработки изображений
200 получение данных магнитного резонанса путем управления системой магнитно-резонансной томографии с помощью команд последовательности импульсов
202 прием карты магнитной восприимчивости субъекта
204 расчет карты неоднородности B0 из данных магнитного резонанса
206 расчет возмущения магнитного поля B0 субъекта из карты магнитной восприимчивости субъекта
208 расчет остаточного возмущения магнитного поля B0 путем вычитания возмущения магнитного поля B0 субъекта из карты неоднородности B0
210 расчет карты костей из остаточного возмущения магнитного поля B0
300 ввод
302 вывод
304 карта вычитания фона B0
306 откорректированная карта неоднородности B0
308 конволюция Грина
400 изображение смоделированного объекта
402 расчет карты восприимчивости, индуцированной телом, для объекта на изображении 400
404 изображение только для воды
406 расчет карты восприимчивости, индуцированной телом, для воды на изображении 406
408 разность между изображениями 402 и 406
410 карта костей
412 вода
414 кортикальная кость
416 костный мозг
502 изображение жиров
504 изображение воды
506 модель субъекта
600 данные магнитного резонанса реконструируют в изображение жиров и изображение воды
602 модель субъекта рассчитывают путем сегментирования изображения жиров и изображение воды
604 карту магнитной восприимчивости субъекта рассчитывают из модели субъекта
Реферат
Использование: для магнитно-резонансной томографии. Сущность изобретения заключается в том, что изобретение предусматривает медицинский аппарат (100, 500), содержащий систему (102) магнитно-резонансной томографии для получения данных (142) магнитного резонанса от субъекта (118) в зоне (108) визуализации. Система магнитно-резонансной томографии содержит: основной магнит (104) для генерирования магнитного поля B0 в зоне визуализации; память (134, 136), содержащую машиноисполняемые команды (160, 162, 164, 166) и команды (140) последовательности импульсов; процессор (130) для управления медицинским аппаратом. Исполнение машиноисполяемых команд заставляет процессор: получать (200) данные магнитного резонанса путем управления системой магнитно-резонансной томографии с помощью команд последовательности импульсов; принимать (202) карту (144) магнитной восприимчивости субъекта; рассчитывать (204) карту (146) неоднородности B0 из данных магнитного резонанса; рассчитывать (206) возмущение (148) магнитного поля B0 субъекта из карты магнитной восприимчивости субъекта; рассчитывать (208) остаточное возмущение (150) магнитного поля B0 путем вычитания возмущения магнитного поля B0 субъекта из карты неоднородности B0; и рассчитывать (210) карту (152) костей из остаточного возмущения магнитного поля B0. Технический результат: обеспечение возможности определения расположения костной ткани с использованием обычных или стандартных протоколов магнитно-резонансной томографии. 3 н. и 11 з.п. ф-лы, 6 ил.
Комментарии