Способ определения расхождений между координатными системами различных технических систем - RU2550666C2
Код документа: RU2550666C2
Чертежи
Описание
Область техники
Изобретение относится к способу определения расхождений между координатными системами (системами координат) различных технических систем.
Уровень техники
Технические системы часто используют координатные системы, необходимые для определения местоположения происходящих событий, действий, которые требуется выполнить, и/или объектов в состоянии движения или покоя. Примерами таких систем являются сенсорные системы, которые определяют местоположение события или объекта в одно- или многомерной координатной системе. Такие сенсорные системы могут, например, выполняться на основе камеры и конфигурироваться как системы отслеживания движения. Подобные системы применяются для распознавания движущихся объектов и слежения за их (изменяющимся) положением.
Примером конкретной системы отслеживания движения, рассматриваемой в рамках изобретения, является так называемый айтрекер, с помощью которого можно детектировать движения глаза. Айтрекеры широко используются в современной лазерной хирургической офтальмологии, состоящей в воздействии на человеческий глаз посредством лазерного излучения с целью устранения или по меньшей мере ослабления неправильного функционирования или патологии глаза.
В отсутствие механической фиксации человеческий глаз никогда не является полностью неподвижным: даже стремясь зафиксироваться на определенном целевом объекте, он продолжает совершать малые и более значительные движения (такие как саккады). Поэтому для детектирования движения глаза, подлежащего коррекции, и для гидирования лазера при осуществлении различных методов лазерной хирургии используется айтрекер. В качестве характерного примера можно назвать рефракционную хирургию, в которой производится абляция (т.е. удаление поверхностного слоя) роговичной ткани посредством лазерного излучения в ультрафиолетовом (УФ) диапазоне, чтобы перепрофилировать переднюю поверхность роговицы и тем самым изменить ее рефракционные свойства. Примером подобных рефракционных методов является LASIK (laser in situ keratomileusis - лазерный интрастромальный кератомилез), в котором сначала посредством механического микрокератома или фемтосекундного лазерного излучения из наружной части роговицы вырезают маленький диск (который специалисты обычно называют лоскутом). Лоскут не полностью отделяется от роговичной ткани, а остается связанным с ней участком, называемым петлей. Затем лоскут отгибают, а открывшийся при этом роговичный материал подвергают аблирующему лазерному воздействию. Затем лоскут укладывают обратно. Поскольку данный метод приводит лишь к незначительному повреждению наружного эпителиального слоя роговицы, заживление травмированной зоны происходит относительно быстро.
Другим примером технических систем, которые используют систему координат, являются лазерные устройства, генерирующие управляемый по положению лазерный пучок для воздействия на материал. Аблирующие положения лазерного пучка, т.е. те положения, в которые нужно направлять данный пучок, могут задаваться значениями координат этих положений в координатной системе лазерного устройства. Для лазерных устройств, генерирующих импульсное лазерное излучение, каждое значение координат может быть приписано единственному лазерному импульсу или группе таких импульсов.
Вышеупомянутое применение айтрекера в лазерной хирургии человеческого глаза указывает на то, что на практике часто используются решения, предусматривающие совместное функционирование различных технических систем, у каждой из которых имеется собственная система координат. Если одна из технических систем передает значения координат, которые она определила или зафиксировала относительно собственной системы координат, другой техническое системе, которая принимает эти передаваемые значения, чтобы определить координаты положений (в которых будут производиться какие-либо действия) в своей собственной координатной системе, могут возникнуть проблемы, например, если координатные системы двух технических систем взаимно не согласованы. Нетрудно себе представить, что некоторая точка в координатном пространстве одной технической системы может иметь координаты, отличные от координат той же точки в координатном пространстве другой технической системы. Это различие может быть обусловлено, например, различиями в положениях начал координат в координатных пространствах обеих систем. Кроме того, две системы координат могут быть взаимно развернуты. Еще одна причина может состоять в различии масштабов вдоль осей координат, т.е. одни и те же номинальные значения вдоль оси координат могут соответствовать в двух системах координат различным расстояниям от начала координат.
Если координатные системы различных совместно функционирующих технических систем не являются пространственно идентичными, для обеспечения их правильного совместного функционирования необходимо, как минимум, иметь точное знание о различиях в пространственном положении и/или в масштабах их координатных систем, чтобы иметь возможность правильно преобразовать значения координат в одной координатной системе в соответствующие значения координат в другой координатной системе. Часто такое априорное знание отсутствует, так что его нужно получать ценой значительных трудозатрат.
В US 4134681 рассматривается определение взаимной ориентации двух физических систем. С этой целью предусматривается определение, для двух векторов, характеризующих, например, направление лазерных пучков, направления каждого вектора в координатных системах обеих физических систем. Таким образом, определяются четыре таких вектора, по два для каждой координатной системы. Затем, используя эти четыре вектора, определяют взаимную ориентацию двух координатных систем и, соответственно, двух физических систем.
Раскрытие изобретения
Изобретение направлено на создание простого способа, который, прежде всего, может быть автоматизирован для использования при выявлении расхождений между координатными системами различных технических систем.
Для решения этой задачи изобретение предлагает способ определения расхождений между координатными системами различных технических систем, включающий:
- определение координатного положения референтного элемента на тест-объекте в координатной системе, связанной с первой технической системой;
- связывание с тест-объектом по меньшей мере одного тест-элемента, положение которого определено в координатной системе второй технической системы относительно координатного положения референтного элемента;
- определение координатного положения по меньшей мере одного тест-элемента и/или по меньшей мере одного производного от него элемента в координатной системе первой технической системы и
- определение расхождений между координатными системами первой и второй технических систем по меньшей мере с использованием:
(a) найденного координатного положения по меньшей мере одного тест-элемента и/или по меньшей мере одного производного от него элемента в координатной системе первой технической системы и
(b) координатного положения референтного элемента в координатной системе первой технической системы.
Согласно одному варианту изобретения используют тест-объект, снабженный референтным паттерном, который может быть детектирован первой технической системой и который может служить референтным элементом. Альтернативно, референтный паттерн может быть сконфигурирован так, чтобы из него легко определялся референтный элемент. Например, референтный элемент может быть центром (срединной точкой) геометрического объекта, служащего референтным паттерном. Алгоритмы, которые по детектированному геометрическому профилю находят его срединную точку, известны и поэтому не требуют рассмотрения в данном описании. При этом в предпочтительном варианте первая техническая система способна, используя детектированный референтный паттерн, определить координатное положение референтного элемента в своей координатной системе (т.е. в координатной системе первой технической системы).
Найденное таким образом координатное положение (определяемое одним или более координатными значениями) передается затем первой технической системой во вторую техническую систему. Вторая система использует переданные ей координатные значения референтного элемента, как если бы они являлись значениями в ее собственной координатной системе (т.е. в координатной системе второй технической системы), и генерирует в этой координатной системе координатное положение тест-элемента в соответствии с заранее установленным правилом генерирования, зависящим от координатного положения референтного элемента. Так, для тест-элемента может быть задано следующее правило генерирования: по меньшей мере для части координатных осей системы координат второй технической системы тест-элемент расположен на заданном координатном расстоянии от референтного элемента. Такое правило генерирования позволяет явным образом задать в координатной системе второй технической системы положение тест-элемента относительно положения референтного элемента.
Согласно предпочтительному варианту вторая техническая система затем формирует (связывает с тест-объектом) тест-элемент в найденном описанным образом координатном положении, зависящем от координатного положения референтного элемента. Если требуется получить более одного тест-элемента, вторая техническая система выполняет описанные операции применительно к каждому из тест-элементов.
На следующем шаге тест-объект с референтным паттерном и сформированными тест-элементами снова исследуется первой технической системой, определяющей координатное положение по меньшей мере одного тест-элемента и/или производного от него элемента в координатной системе первой технической системы. По результатам этого определения может быть выявлено одно или более расхождений внутри координатной системы первой технической системы. Предпочтительно определяют по меньшей мере один вектор смещения, характеризующий пространственное смещение координатной системы второй технической системы относительно координатной системы первой технической системы, и/или взаимный разворот координатных систем двух технических систем, и/или различия в масштабах между координатными системами двух технических систем.
Найденные расхождения могут быть преобразованы в один или более коэффициентов коррекции, которые используются второй технической системой при выполнении дальнейших операций с целью коррекции любых координатных положений, полученных от первой технической системы. В результате обеспечивается успешное согласование систем координат двух технических систем.
В одном предпочтительном варианте способа по изобретению с различными координатными положениями на тест-объекте связывают различные тест-элементы, размещая по меньшей мере часть тест-элементов в вершинах многоугольника, например прямоугольника, расположенного на тест-объекте вокруг референтного элемента. При этом в качестве производного элемента может быть определен центр многоугольника, заданного тест-элементами, а в координатной системе первой технической системы может быть определено расхождение между координатными положениями референтного элемента и центра многоугольника.
Согласно другому варианту расхождения между координатными системами первой и второй технических систем определяют с использованием целевого координатного положения по меньшей мере одного тест-элемента и/или производного элемента в координатной системе первой технической системы. Целевое координатное положение тест-элемента может быть определено, например, применением вышеупомянутого правила генерирования в координатной системе первой технической системы. Если, например, правило генерирования для тест-элемента предусматривает наличие заданных положений референтного элемента по двум осям х, у системы координат второй технической системы, целевое координатное положение тест-элемента в координатной системе первой технической системы может соответствовать тем же самым номинальным (численным) значениям координат (координатных расстояний), примененных к ранее определенному координатному положению референтного элемента.
Согласно предпочтительному варианту в составе первой технической системы используют устройство для отслеживания движений, содержащее камеру, обращенную к тест-объекту, и определяют посредством указанного устройства координатные положения референтного элемента и по меньшей мере одного тест-элемента и/или производного элемента в первой координатной системе.
Тест-объект может быть снабжен паттерном, центр которого определяют, посредством устройства отслеживания движения, в качестве референтного элемента. Референтный паттерн может быть, например, плоским паттерном, создающим оптический контраст относительно окружающей его зоны. Оптический контраст следует обеспечить по меньшей мере на границе референтного паттерна и окружающей его зоны. Контраст может достигаться, по меньшей мере частично, различиями в градациях серого или в цветовых тонах паттерна и окружающей зоны. Альтернативно или дополнительно, можно создать или усилить контраст между референтным паттерном и окружающей зоной путем различных обработок поверхностей этих двух зон или осуществлением обработки только одной из них. Например, зона, окружающая референтный паттерн, может быть снабжена множеством распечатанных точек или линий, тогда как внутри референтного паттерна отсутствуют какие-либо элементы, а вся его поверхность имеет один и тот же серый или цветовой тон.
С другой стороны, нет необходимости придавать референтному паттерну и/или окружающей зоне только один цвет. Референтный паттерн и/или окружающая зона могут иметь изменяющийся цвет или изменяющуюся градацию серого.
Референтный паттерн может иметь закругленный контур, например круглый или эллиптический. Такое выполнение облегчает двумерное моделирование человеческого зрачка. Размер референтного паттерна может по меньшей мере примерно соответствовать человеческому зрачку, и в таком случае этот паттерн будет служить моделью зрачка. Такой вариант удобен тем, что известны и доступны на рынке алгоритмы обработки изображения, которые рассчитывают положение центра зрачка по полученному изображению зрачка глаза. Поэтому тест-объект с такой моделью зрачка особенно удобен при использовании изобретения в составе устройства для воздействия на человеческий глаз методом лазерной хирургии. Нетрудно понять, что применимы и референтные паттерны незакругленной формы при условии, что референтный паттерн имеет легко определяемый центр. При этом референтный паттерн необязательно должен соответствовать по размеру человеческому зрачку: он может быть как больше, так и меньше зрачка.
Вторая техническая система предпочтительно содержит лазерное устройство, формирующее на тест-объекте посредством лазерного, предпочтительно импульсного, пучка по меньшей мере один тест-элемент. Для позиционирования лазерного пучка лазерным устройством используют вторую систему координат.
С целью облегчить детектирование сформированного тест-элемента посредством айтрекера или иного снабженного камерой устройства для отслеживания движений рекомендуется воздействовать на тест-объект лазерным пучком таким образом, чтобы обеспечить локальное изменение цвета тест-объекта и/или образование в нем локального кратера.
По меньшей мере одно выявленное расхождение целесообразно использовать для коррекции координатных данных, которые передаются от первой технической системы и получаются второй технической системой, нуждающейся в этих данных для своего функционирования. По меньшей мере одно выявленное расхождение может быть преобразовано в один или более параметров коррекции или в калибровочные коэффициенты, применяемые к координатным данным, переданным первой системой.
Изобретение относится также к тест-объекту для использования в описанном способе. В тест-объекте имеется оптически выделяющийся (референтный) паттерн, причем по меньшей мере зона вокруг паттерна выполнена с возможностью генерирования в ней, посредством локального облучения лазером, оптически выделяющихся тест-элементов.
Паттерн предпочтительно является пространственным паттерном, моделирующим человеческий зрачок и имеющим первый цвет, а тест-объект, находящийся в зоне вокруг паттерна, предпочтительно имеет второй цвет, отличный от первого. Термин "цвет" в контексте изобретения имеет широкое значение. Различающиеся цвета могут быть, например, реализованы различными цветовыми тонами (включая оттенки серого) или различными градациями серого, или различными значениями яркости цветового тона.
Согласно одному примеру первый цвет может быть получен распечаткой на подложке тест-объекта первой краски, тогда как в зоне, окружающей референтный паттерн, подложка может иметь единственный окрашенный слой, цвет которого отличен от первого цвета. При облучении лазером этот окрашенный слой (например, белого цвета) может изменить свою окраску, что приведет к выделению тест-элементов. Альтернативно, подложка может иметь в окружающей зоне несколько наложенных друг на друга слоев различных красок, верхняя из которых имеет второй цвет, так что тест-объект в окружающей зоне будет восприниматься имеющим второй цвет. Этот второй цвет может быть устранен обесцвечиванием второй краски посредством облучения лазером или иным методом, так что станет виден слой нижележащий краски. Такое решение гарантирует легкое распознавание как референтного паттерна, так и по меньшей мере одного тест-паттерна.
Тест-объект может быть выполнен в форме пластинки или листа, например в форме куска бумаги или картона, на плоской поверхности которого имеется паттерн и который одновременно сконфигурирован с возможностью формирования на нем тест-элементов. Чтобы сделать тест-объект в целом жестким и прочным, данный кусок бумаги или картона может быть, например, приклеен к стабильной несущей пластине из металла или пластика.
В одном варианте тест-объект может иметь криволинейную (или иную трехмерную) поверхность, на которой имеется референтный паттерн и с которой могут быть связаны тест-элементы. В частности, эта поверхность может моделировать переднюю поверхность человеческого глаза. В этом случае, чтобы избежать погрешностей масштаба, при согласовании координатных систем может потребоваться дополнительный учет постоянной или изменяющейся кривизны данной поверхности.
Кроме того, изобретение относится к устройству для лазерной хирургической офтальмологии, содержащему:
- лазерное устройство для получения сфокусированного импульсного лазерного пучка и подачи его на глаз, подвергаемый лечебному воздействию,
- айтрекер для детектирования движений глаза и
- управляющий блок, связанный с айтрекером и выполненный с возможностью управлять лазерным устройством в зависимости от детектированных движений глаза,
при этом управляющий блок выполнен с дополнительными возможностями:
(i) обеспечения осуществления описанного способа определения расхождений между первой координатной системой, используемой айтрекером, и второй координатной системой, используемой лазерным устройством, и
(ii) учета найденных расхождений при управлении лазерным устройством.
Краткое описание чертежей
Далее изобретение будет подробно описано со ссылками на прилагаемые чертежи.
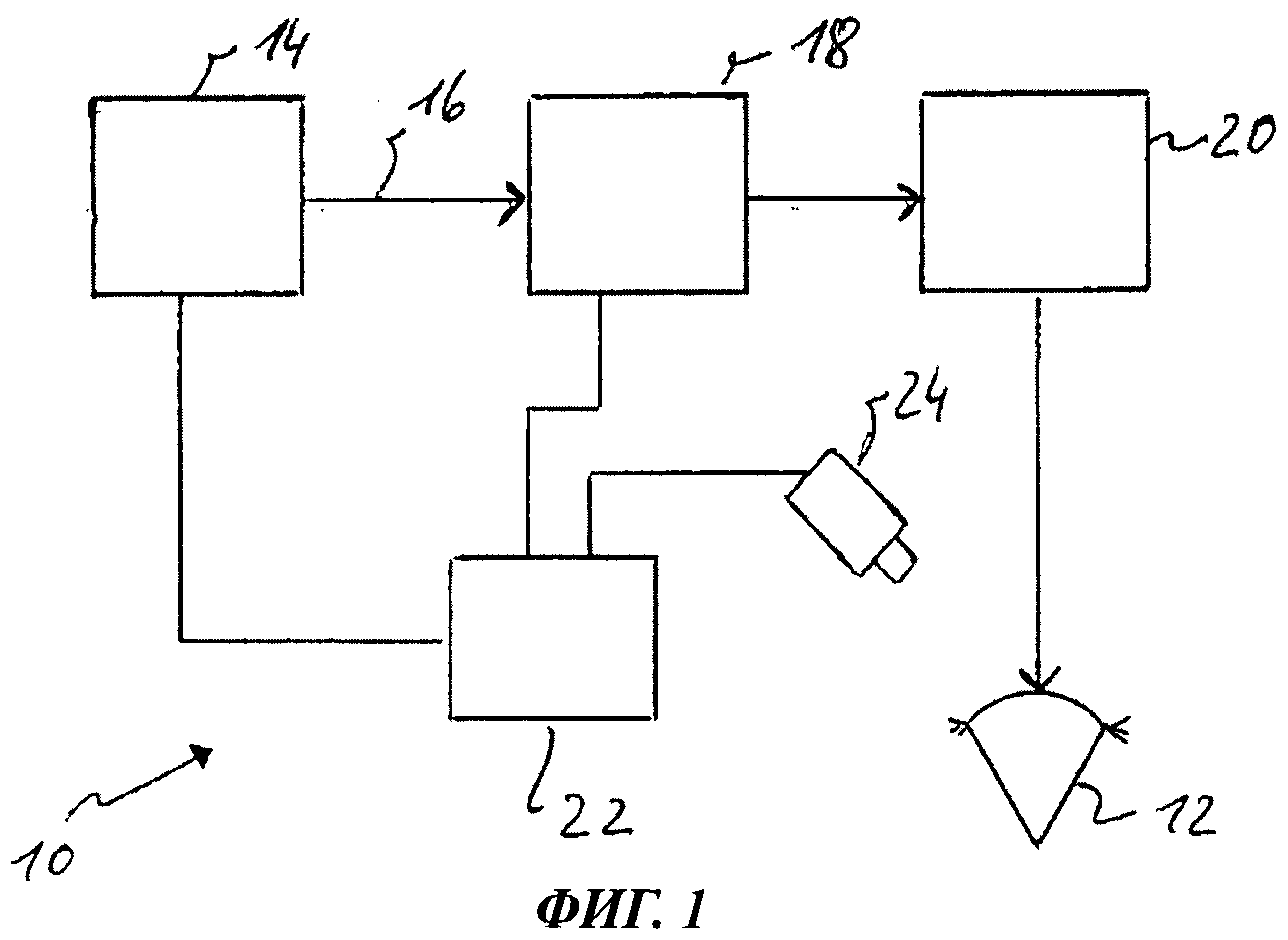
На фиг.1 представлен, в виде блок-схемы, вариант устройства для лазерной хирургической офтальмологии.
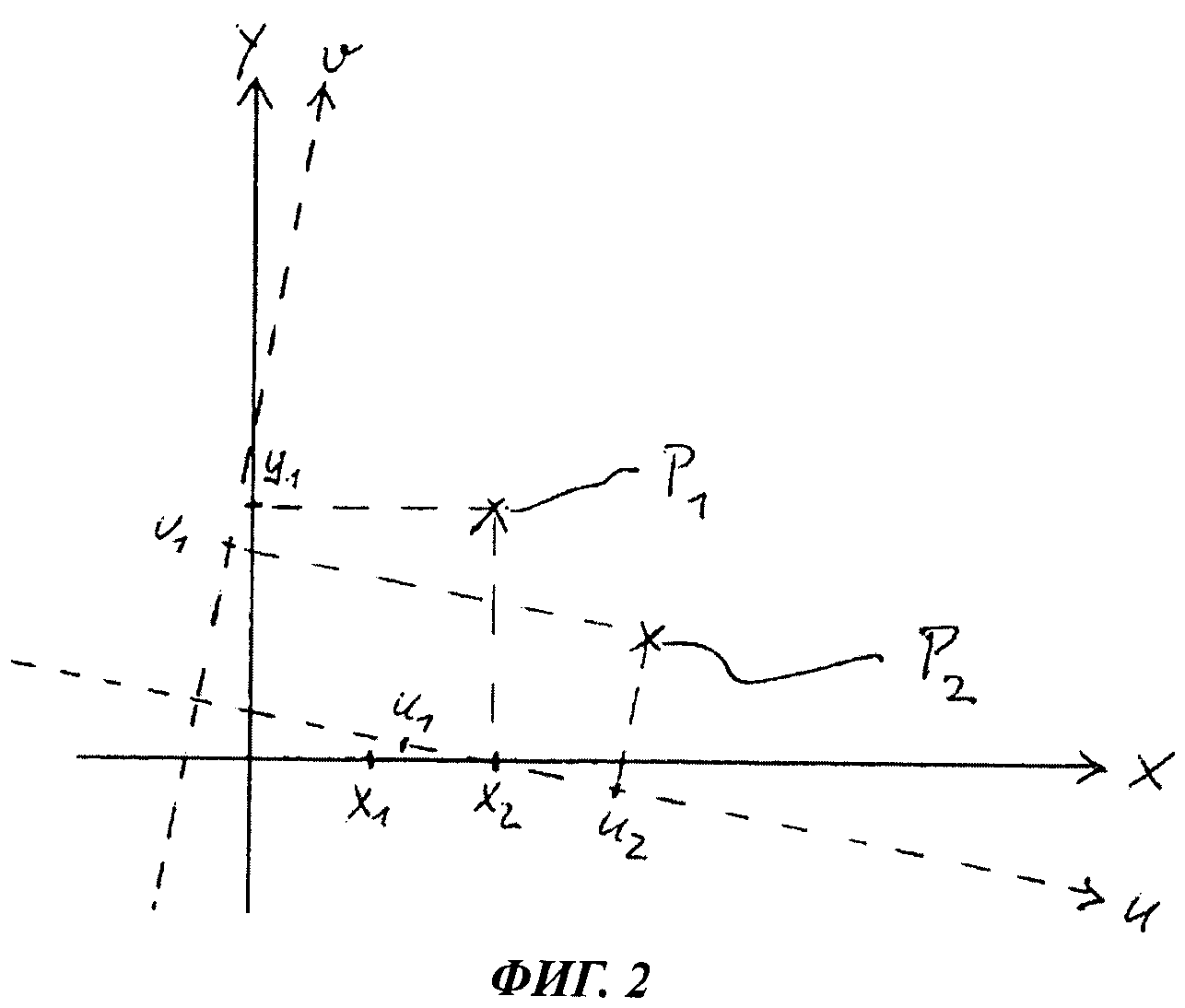
На фиг.2 представлен пример положений двух точек в двух системах координат, используемых в устройстве по фиг.1.
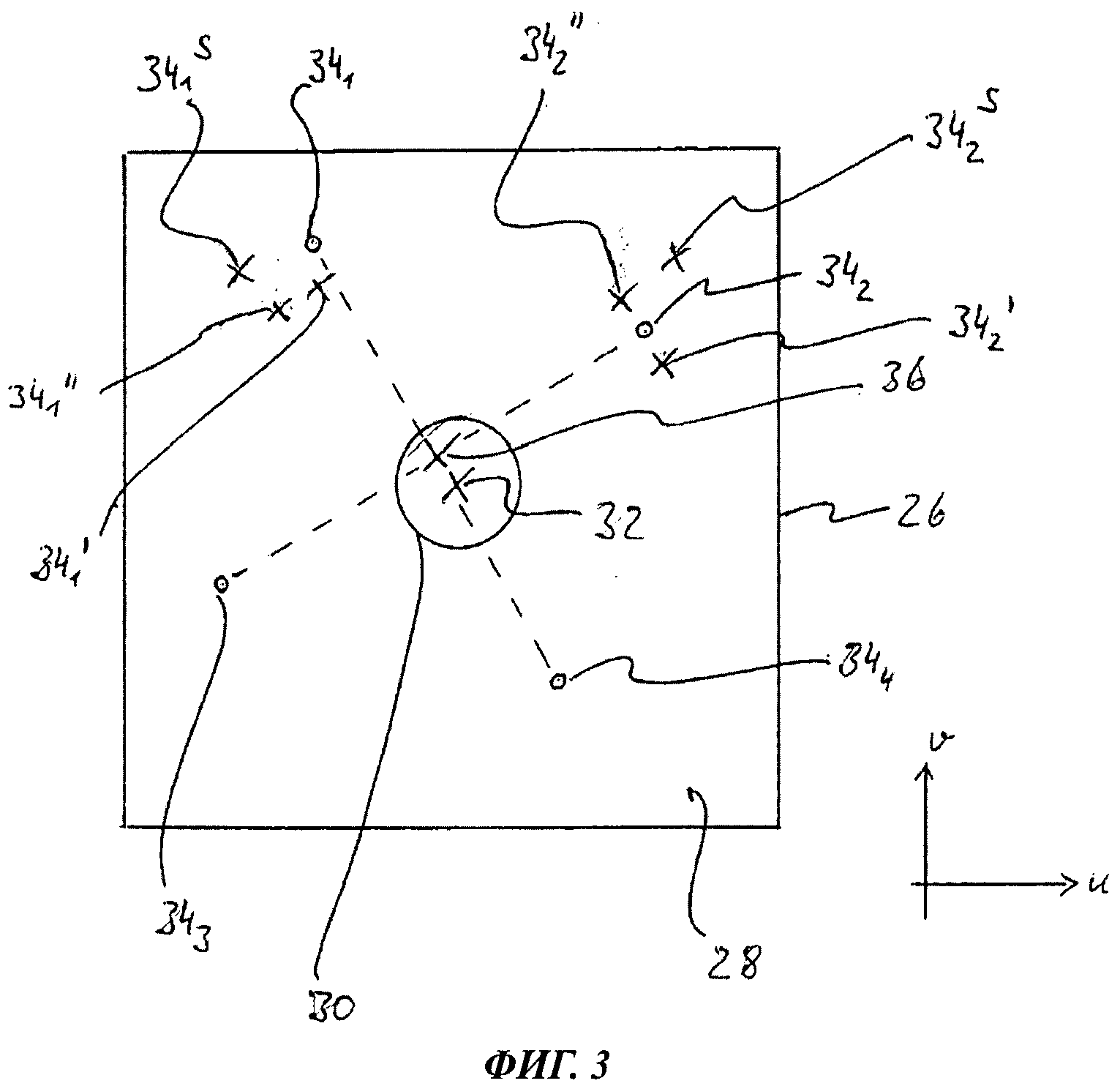
На фиг.3 представлен вариант тест-объекта, пригодного для калибровки устройства по фиг.1.
Осуществление изобретения
Показанное на фиг.1 устройство 10 для лазерной хирургической офтальмологии предназначено для проведения абляции роговицы глаза 12, подвергаемого лечебному воздействию. Оно содержит лазерный источник 14, генерирующий импульсный лазерный пучок 16, который посредством блока управляемого отклонения (сканера) 18 перемещается заданным образом в плоскости, нормальной к направлению пучка (именуемой далее плоскостью x-y). Последовательно по отношению к сканеру 18 установлен фокусирующий блок 20, который фокусирует лазерный пучок 16 на оперируемый глаз 12.
При проведении абляции длина волны излучения лазерного источника 14 лежит в ультрафиолетовом диапазоне. Например, лазерный источник 14 содержит эксимерный лазер, излучающий 193 нм.
Сканер 18 сформирован, например, известным образом, на основе пары отклоняющих зеркал с гальванометрическим управлением. Фокусирующий блок 20 может быть образован единственной линзой или многолинзовой системой.
Электронный управляющий блок 22 управляет лазерным источником 14 и сканером 18 в соответствии с профилем абляции, задаваемым управляющей программой, предварительно разработанной для конкретного пациента. Профиль абляции определяет, какое количество роговичного материала должно быть удалено в данной точке оперируемого глаза. Каждый лазерный импульс приводит к удалению определенного количества материала. Управляющая программа обеспечивает подачу к каждой точке в пределах зоны абляции такое количество лазерных импульсов, которое необходимо для удаления требуемой толщины слоя материала. Положения точек, в которых производится абляция, описываются парами координат, соответствующих двум осям прямоугольной системы координат x-y, которая задает указанную плоскость x-y. Пары координат определяют расстояния по соответствующим осям от центра профиля абляции ("центра абляции"), который обычно задается относительно центра зрачка оперируемого глаза 12. Неизбежные движения глаза 12 приводят к постоянным изменениям положения центра зрачка и, следовательно, центра абляции в координатной системе x-y.
Чтобы отслеживать движения глаза, устройство 10 содержит устройство 24 отслеживания движений глаза (именуемое для краткости айтрекером), например, снабженное камерой, формирующей инфракрасное изображение глаза 12, главным образом его радужной оболочки со зрачком, и с помощью соответствующей программы обработки изображений рассчитывающее положение центра зрачка. Однако айтрекер 24 не использует ту же систему координат x-y, что и управляющий блок 22, и сканер 18. Вместо этого он рассчитывает положение центра зрачка в своей собственной (прямоугольной) координатной системе, которая далее именуется координатной системой u-v. Именно в этой координатной системе айтрекер 24 выдает положение центра зрачка, выраженное через пару координат, т.е. координатные значения u и v.
Управляющий блок 22 получает от айтрекера 24 координатное положение центра зрачка в системе u, v (далее u-v положение) и преобразует его в соответствующее координатное положение в системе x, y. В этой операции он исходит из первоначально определенной корректирующей информации, которая характеризует любые пространственные расхождения и различия масштабов между двумя координатными системами. Корректирующей информации может быть придана, например, форма корректирующей функции или одного или более коэффициентов коррекции, используемых в качестве множителей или слагаемых. Исходя из положения центра зрачка, преобразованного в систему координат x-y, управляющий блок 22 может вычислить текущее положение центра абляции и соответственно настроить сканер.
На фиг.2 схематично проиллюстрированы возможные расхождения между системой координат x-y, используемой управляющим блоком 22 и сканером 18, и системой координат u-v, используемой айтрекером 24. Для большей наглядности система координат х-у изображена сплошными линиями, а система координат u-v - штриховыми.
Можно видеть, что первое расхождение в пространстве между двумя системами координат в примере по фиг.2 состоит в различных положениях начал координат (т.е. точек пересечения координатных осей). Данное расхождение может быть описано посредством вектора смещения.
В качестве второго расхождения в данном примере можно отметить взаимный разворот координатных систем. Мерой этого разворота может служить соответствующее угловое значение.
Третье расхождение между рассматриваемыми системами может заключаться в различных масштабах. Чтобы проиллюстрировать эту ситуацию, на фиг.2 отмечены два координатных значения по оси x (x1, x2), которые номинально соответствуют координатным значениям u1, u2 по оси u. Номинальное соответствие означает, что координатные значения x1 и u1 (как и координатные значения x2 и u2) численно равны.
Легко видеть, что координатное значение x1 соответствует значительно меньшему расстоянию от начала координат системы x-y, чем расстояние от начала координат системы u-v для координатного значения u1. Аналогично, расстояние координатного значения x2 от начала координат системы x-y меньше, чем расстояние от начала координат системы u-v для координатного значения u2. При совпадении численных значений x1 и u1 и численных значений x2 и u2 это означает, что масштаб по оси x отличается от масштаба по оси u.
Аналогично, на оси у (см. фиг.2) отмечено координатное значение y1, которое номинально соответствует координатному значению v1, отмеченному на оси v. Координатные значения y1, v1 также соответствуют различным расстояниям от начал соответствующих координатных систем. Более конкретно, расстояние от начала координат системы x-y для координатного значения y1 существенно больше, чем аналогичное расстояние для координатного значения v1. Это также указывает на различие масштабов по осям y и v.
Такие различия в масштабах могут существовать для всех осей координатных систем или только для некоторых осей.
Каждое из трех рассмотренных расхождений приводит к тому, что точки, заданные в координатной системе x-y и в координатной системе u-v посредством одних и тех же координатных значений, имеют различные положения в пространстве. На фиг.2 это иллюстрируется на примерах точек P1 и P2. Точка P1 задана координатными значениями x2, y1, а точка P2 - координатными значениями u2, v1. Хотя численные значения x2 и u2 (а также y1 и v1) совпадают, между точками P1, P2 имеется существенное различие в положениях. Вместе с тем, в отсутствие рассмотренных расхождений (смещения начал, разворота, различия в масштабах) точки P1, P2 должны были совпасть.
Фиг.3 поясняет вариант способа определения расхождений между двумя системами координат различных технических систем. В приводимом примере рассматриваются система координат, используемая управляющим блоком 22 и сканером 18, и система координат, используемая айтрекером 24.
Сначала айтрекер 24 исследует тест-объект 26, который устанавливают в устройство 10 в положение, по существу, совпадающее с положением, в котором потом будет находиться оперируемый глаз 12. Более конкретно, тест-объект 26 устанавливают в фокальной плоскости лазерного пучка 16.
В данном примере тест-объект 26 имеет плоскую верхнюю сторону (поверхность) 28, примерно в середине которой имеется референтный паттерн 30, оптические свойства которого отличаются от свойств окружающей его зоны. Данный паттерн 30 моделирует зрачок, т.е. имеет форму круга, близкого по размеру зрачку, и предпочтительно полностью окрашен. Паттерн 30 необязательно должен точно соответствовать кругу; допустимы более или менее значительные отклонения от этой формы.
Программа обработки изображения, имеющаяся в айтрекере 24, распознает паттерн 30 в форме зрачка и вычисляет положение центра паттерна в своей координатной системе u-v. Центр паттерна, обозначенный на фиг.3, как 32, в контексте изобретения образует референтный (опорный) элемент.
Айтрекер 24 передает координаты u-v центра 32 паттерна управляющему блоку 22. Этот блок управляет лазерным источником 14 и сканером 18 так, чтобы сформировать, посредством облучения лазером, на верхней стороне 28 тест-объекта 26 тест-элементы 34. Тест-элементы 34 - это, например, маленькие кружки или элементы другой геометрической формы, которые по своим оптическим свойствам отличаются от окружающих их зон на верхней стороне 28 тест-объекта 26 и которые могут детектироваться айтрекером 24. Формирование каждого тест-элемента 34 может потребовать, например, приложения многих сотен или даже многих тысяч лазерных импульсов.
Положения формируемых тест-элементов 34 рассчитываются управляющим блоком 22 в зависимости от u-v координат центра 32 круга, переданных айтрекером 24. Исходное правило генерирования определяет координаты x, y положений формируемых тест-элементов 34 относительно центра 32 круга. Пример правила генерирования может задавать формирование четырех тест-элементов 341…344, расположенных в вершинах прямоугольника вокруг центра 32, который становится центром данной конфигурации. Такое расположение тест-элементов 34 показано на фиг.3, причем тест-элементы соответствуют вершинам квадрата.
Однако можно видеть, что в примере, представленном на фиг.3, тест-элементы 34 не расположены строго симметрично относительно центра 32, так что центр 36 задаваемого ими квадрата (определяемый, как точка пересечения его взаимно перпендикулярных диагоналей) смещен относительно центра 32 круга. Взаимное смещение центра 32 круга и центра 36 квадрата позволяет заключить, что между системой координат u-v айтрекера 24 и системой координат x-y управляющего блока 22 и сканера 18 имеется расхождение. Действительно, при наличии расхождения две точки с численно одинаковыми координатными значениями в системах координат u-v и x-y не совпадают, как было пояснено на примере точек P1 и P2, на фиг.2. Поэтому точка в координатной системе x-y, имеющая те же координатные значения, что и центр 32 круга, не будет пространственно конгруэнтна с этим центром, а окажется смещенной относительно него. Поскольку тест-элементы 34 сгенерированы с отсчетом от этой (смещенной) точки в координатной системе x-y, они центрированы относительно нее, но не относительно центра 32 круга.
Для количественного оценивания расхождения между двумя системами координат тест-объект 26, снабженный тест-элементами 34, снова сканируется айтрекером 24, чтобы определить координаты u, v тест-элементов в координатной системе u-v. Затем по найденным координатам u, v тест-элементов 34 рассчитываются координаты u, v центра 36 квадрата. В контексте изобретения центр 36 квадрата рассматривается как производный элемент, поскольку он рассчитывается по положениям тест-элементов 34.
Используя найденные u, v координаты тест-элементов 34 и центра 36 квадрата, управляющий блок 22 получает информацию, характеризующую расхождения между системами координат u-v и x-y.
Более конкретно, расстояния от центра 36 квадрата до центра 32 круга по осям u и v позволяют определить вектор смещения, который характеризует размер и направление расхождения в положениях начал координатных систем. Согласно одному примеру управляющий блок затем рассчитывает по меньшей мере для одной пары тест-элементов 34 первоначально скорректированные положения по координатам u, v, каждое из которых смещено относительно соответствующего тест-элемента 34 на вектор смещения. Эти скорректированные положения затем центрируются относительно центра 32 круга. На фиг.3 показаны, как пример, первоначально скорректированные u, v положения 341', 342' для тест-элементов 341, 342 соответственно, смещенные относительно этих тест-элементов так же, как центр 36 квадрата смещен относительно центра 32 круга.
Относительный разворот двух координатных систем может быть определен управляющим блоком 22, рассчитывающим целевые координатные положения в координатной системе u-v, например, для той же пары тест-элементов, для которой были найдены первоначально скорректированные u, v положения. С этой целью он применяет заданное выше правило генерирования для тест-элементов в координатной системе u-v относительно u, v положения центра 32 круга. Например, на фиг.3 найденное таким способом целевое положение в координатной системе u-v для тест-элемента 341 обозначено, как , а для тест-элемента 342 - как .
Разворот координатных систем можно легко определить, сопоставляя прямую, соединяющую координатные положения и , с прямой, соединяющей первоначально скорректированные u, v положения 341' и 342'. Если эти две соединяющие прямые взаимно параллельны, системы координат не имеют взаимного разворота. Если же они расположены под углом одна к другой, угол между этими прямыми соответствует углу взаимного разворота координатных систем.
Чтобы определить разницу в масштабах между двумя системами координат, управляющий блок 22, используя найденный угол разворота координатных систем, может определить, исходя из первоначально скорректированных u, v положений пары тест-элементов, повторно скорректированные u, v положения, которые, в дополнение к линейному смещению, повернуты также на угол разворота. В качестве примера на фиг.3 показаны повторно скорректированные u, v положения 341”, 342” для тест-элементов 341, 342. При этом прямые, соединяющие эти повторно скорректированные u, v положения 341”, 342”, параллельны прямым, соединяющим целевые координатные положения , .
Однако повторно скорректированные u, v положения 341”, 342” остаются неконгруэнтными целевым координатным положениям , . Это указывает, что имеет место различие в масштабах по осям двух координатных систем.
Определяя расстояния по оси u между целевыми координатными положениями , и между повторно скорректированными u, v положениями 34i", 342" и сравнивая численные значения этих расстояний, можно выявить и измерить любые различия в масштабах по оси u системы координат u-v и по оси x системы координат x-y. Аналогичный подход применим и к любым различиям в масштабах по осям v и y, которые могут быть выявлены и измерены путем определения расстояний по оси v целевых координатных положений , и повторно скорректированных положений 341”, 342” и сравнения количественных значений этих расстояний.
Альтернативой использованию расстояний по оси u или v для целевых координатных положений и повторно скорректированных u, v положений пары тест-элементов для определения расхождения координатных систем по масштабам является использование расстояния по оси u и/или v между целевым координатным положением тест-элемента и центром 32 круга и между повторно скорректированным u, v положением того же тест-элемента и центром 32 круга.
Должно быть понятно, что размещение тест-элементов 34 в вершинах прямоугольника приведено только в качестве примера и что тест-элементы 34 можно расположить в вершинах какого-либо другого многоугольника и даже по окружности.
Чтобы обеспечить возможность оптического распознавания тест-элементов 34, на зону поверхности 28 тест-объекта вокруг референтного паттерна 30 можно нанести, методом печати, краску, которая исчезает при облучении ее лазером, открывая лежащий под ней слой другой краски. В таком варианте тест-объект 26 может содержать подложку в форме пластинки или листа, на плоские поверхности которого методом печати нанесен подстилающий слой краски, поверх которого в зоне референтного паттерна 30 распечатан слой краски другого, первого цвета, образующий референтный паттерн 30. Вне паттерна 30 распечатан слой краски второго, отличного от первого, цвета. Этот слой может быть обесцвечен посредством облучения лазером или устранен каким-то иным образом.
В альтернативном варианте в зоне вне референтного паттерна 30 можно распечатать сетку из тонких близкорасположенных линий. Под действием локального облучения лазером линии сетки могут быть разорваны в местах облучения, например благодаря применению для сетки краски, обесцвечиваемой лазерным излучением, или генерированию с помощью лазера кратеров в верхней поверхности 28 тест-объекта 26. Разрывы в сетке могут распознаваться с помощью соответствующей программы обработки изображений и использоваться в качестве тест-элементов.
Устройство 10 способно осуществить описанный способ определения расхождения между системами координат u-v и x-y полностью автоматически, как только пользователь введет тест-объект 26 и даст соответствующую стартовую команду. При этом управляющий блок 22 может определять, в рамках процесса автоматической калибровки, соответствующие параметры коррекции для трансформирования координат из координатной системы u-v в координатную систему x-y и сохранять их в запоминающем устройстве (не требующем подробного описания).
Реферат
Изобретение относится к медицине, а именно к способам и устройствам определения расхождения между координатными системами различных технических систем. Способ включает определение координатного положения референтного элемента на тест-объекте в координатной системе (u-v), связанной с первой технической системой; связывание с тест-объектом по меньшей мере одного тест-элемента, положение которого определено в координатной системе (x-y) второй технической системы относительно координатного положения референтного элемента; определение координатного положения по меньшей мере одного тест-элемента и/или по меньшей мере одного производного от него элемента в координатной системе (u-v) первой технической системы. Далее способ включает определение расхождений между координатными системами первой и второй технических систем с использованием найденного координатного положения по меньшей мере одного тест-элемента и/или по меньшей мере одного производного от него элемента в координатной системе (u-v) первой технической системы и координатного положения референтного элемента в координатной системе (u-v) первой технической системы. Тест-объект, использующийся в способе, имеет оптически выделяющийся паттерн. Зона вокруг паттерна выполнена с возможностью генерирования в ней посредством локального облучения лазером оптически выделяющихся тест-элементов. Устройство для лазерной хирургической офтальмологии содержит лазерное устройство, айтрекер и управляющий блок для обеспечения осуществления способа определения расхождений между координатными системами. 3 н. и 12 з.п. ф-лы, 3 ил.
Формула
- определение координатного положения референтного элемента (32) на тест-объекте (26) в координатной системе (u-v) первой технической системы (24);
- связывание с тест-объектом по меньшей мере двух тест-элементов (34), положения которых определены в координатной системе (x-у) второй технической системы (18, 22) относительно координатного положения референтного элемента;
- определение координатного положения по меньшей мере двух тест-элементов и/или по меньшей мере одного производного от них элемента (36) в координатной системе (u-v) первой технической системы и
- определение целевых координатных положений указанных тест-элементов (34) в координатной системе (u-v) первой технической системы в соответствии с координатными расстояниями указанных тест-элементов от референтного элемента (32), заданными в координатной системе (x-у) второй технической системы,
- определение вектора смещения для координатных систем первой и второй технических систем по меньшей мере с использованием данных о:
(a) найденном координатном положении по меньшей мере одного тест-элемента и/или по меньшей мере одного производного от него элемента в координатной системе (u-v) первой технической системы и
(b) координатном положении референтного элемента в координатной системе (u-v) первой технической системы,
при этом разворот между координатными системами первой и второй технических систем определяют, используя, дополнительно к указанным данным (а) и (b), целевые координатные положения по меньшей мере двух тест-элементов в координатной системе (u-v) первой технической системы.
- лазерное устройство (14, 18, 20) для получения сфокусированного импульсного лазерного пучка и подачи его на глаз (12), подвергаемый лечебному воздействию,
- айтрекер (24) для детектирования движений глаза,
- управляющий блок (22), связанный с айтрекером и выполненный с возможностью управлять лазерным устройством в зависимости от детектированных движений глаза,
при этом управляющий блок выполнен с дополнительными возможностями:
(i) обеспечения осуществления способа согласно любому из пп. 1-12 для определения расхождений между первой координатной системой (u-v), используемой айтрекером, и второй координатной системой (х-у), используемой лазерным устройством, и
(ii) учета найденных расхождений при управлении лазерным устройством.
Комментарии