Система и способ для определения местоположения градиентной катушки - RU2620864C2
Код документа: RU2620864C2
Чертежи






Описание
Изобретение в целом относится к магнитно-резонансной визуализации (MRI) и, в частности, к системе, устройству, компоновке и способу для расположения изоцентра градиентной катушки системы MRI так, чтобы он совпадал с магнитным центром магнита MRI.
Есть два типичных способа для наложения железных пластин в пределах магнитного поля магнита MRI для достижения требуемой однородности (которая обычно указывается в ppm - частях на миллион). В соответствии с одним способом железные пластины могут быть присоединены непосредственно к внутреннему туннелю магнита и расположены около механического центра магнита. Этот способ может обеспечить фиксированное положение железа, однако этот способ имеет несколько недостатков. Например, обычно железо располагается более далеко от местоположения магнитного изоцентра, что может потребовать использования большего количества железа для достижения заданной однородности. Кроме того, если для достижения требуемой однородности требуется больше железа, то внешняя структура для поддержания магнитных нагрузок на железо может привести к уменьшению пространства для пациента.
Как вариант, железные пластины могут быть размещены в пределах структуры градиентной катушки, что, как правило, располагает железные пластины в более центральное и эффективное местоположение относительно магнитного поля. Однако на аксиальное местоположение этих железных пластин может оказывать влияние аксиальное положение градиентной катушки. Соответственно, если изоцентр градиентной катушки и, таким образом, аксиальное положение железа находится не вблизи магнитного центра MRI, то: (1) однородность поля может изменяться и не удовлетворять проектным спецификациям; и/или (2) сила в осевом направлении, передаваемая теперь в зафиксированном аксиальном положении железом на подвешенную структуру основной катушки магнита, может вызвать смещение структуры основной магнитной катушки, приводя к закрытию тепловых зазоров в магните и возможно соприкосновению. Кроме того, эта сила в осевом направлении, вызванная смещенным аксиальным местоположением железа, вероятно приведет к дополнительным нагрузкам на подвесную систему, поддерживающую структуру основной катушки. Эти дополнительные нагрузки на подвеску могут превысить прочность опорных элементов, приводя к их поломке.
Примерные варианты осуществления изобретения могут обеспечить, например, системы, устройство, компоновки и способы для точного определения местоположения магнитного центра машины MRI и расположения изоцентра градиентной катушки так, чтобы он совпадал с магнитным центром машины MRI. Аспекты изобретения могут обеспечить более однородное магнитное поле при MRI и могут уменьшить силы, передаваемые на подвесную систему катушки.
Примерный вариант осуществления изобретения может обеспечить способ для определения местоположения магнитного центра магнита MRI с изоцентром градиентной катушки. Способ может включать в себя этапы, на которых (a) определяют первое местоположение в пределах магнита магнитно-резонансной визуализации (MRI) относительно первой заранее заданной контрольной поверхности магнита MRI, первое местоположение, представляющее собой центр магнитного поля магнита MRI; (b) определяют второе местоположение в пределах градиентной катушки относительно второй заранее заданной контрольной поверхности градиентной катушки, второе местоположение, представляющее собой изоцентр градиентной катушки, при этом когда градиентная катушка установлена в пределах туннеля магнита MRI, вторая заранее заданная контрольная поверхность примыкает к первой заранее заданной контрольной поверхности; и (c) определяют отрегулированное положение для первой заранее заданной контрольной поверхности как функцию первого местоположения и второго местоположения, отрегулированное положение, соответствующее положению первой заранее заданной контрольной поверхности, в котором первое местоположение совпадает со вторым местоположением, когда градиентная катушка установлена в пределах туннеля магнита MRI.
Дополнительный примерный вариант осуществления изобретения может обеспечить систему MRI. Система MRI может включать в себя магнит MRI, включающий в себя туннель и имеющий магнитное поле; и градиентную катушку, расположенную в пределах туннеля и имеющую изоцентр. Первое местоположение в пределах магнита MRI определяется относительно первой заранее заданной контрольной поверхности магнита MRI, причем первое местоположение представляет собой центр магнитного поля. Второе местоположение в пределах градиентной катушки определяется относительно второй заранее заданной контрольной поверхности градиентной катушки, причем второе местоположение представляет собой изоцентр. Когда градиентная катушка установлена в пределах туннеля, вторая заранее заданная контрольная поверхность примыкает к первой заранее заданной контрольной поверхности. Первая заранее заданная контрольная поверхность выставляется в отрегулированное положение, причем отрегулированное положение определяется как функция первого местоположения и второго местоположения и соответствует положению первой заранее заданной контрольной поверхности, в котором первое местоположение совпадает со вторым местоположением, когда градиентная катушка установлена в пределах туннеля.
Еще один примерный вариант осуществления изобретения может обеспечить вычислительную систему для определения местоположения магнитного центра магнита MRI с изоцентром градиентной катушки. Вычислительная система включает в себя процессор и устройство памяти. Процессор определяет первое местоположение в пределах магнита MRI относительно первой заранее заданной контрольной поверхности магнита MRI, причем первое местоположение представляет собой центр магнитного поля магнита MRI. Процессор определяет второе местоположение в пределах градиентной катушки относительно второй заранее заданной контрольной поверхности градиентной катушки, причем второе местоположение представляет собой изоцентр градиентной катушки. Когда градиентная катушка установлена в пределах туннеля магнита MRI, вторая заранее заданная контрольная поверхность примыкает к первой заранее заданной контрольной поверхности. Процессор определяет отрегулированное положение для первой заранее заданной контрольной поверхности как функцию первого местоположения и второго местоположения, причем отрегулированное положение соответствует положению первой заранее заданной контрольной поверхности, в котором первое местоположение совпадает со вторым местоположением, когда градиентная катушка установлена в пределах туннеля магнита MRI.
Изобретение объясняется более подробно в следующих примерных вариантах осуществления и со ссылкой на чертежи, на которых одинаковые или подобные элементы частично обозначены одинаковыми номерами позиций, а признаки различных примерных вариантов осуществления являются комбинируемыми.
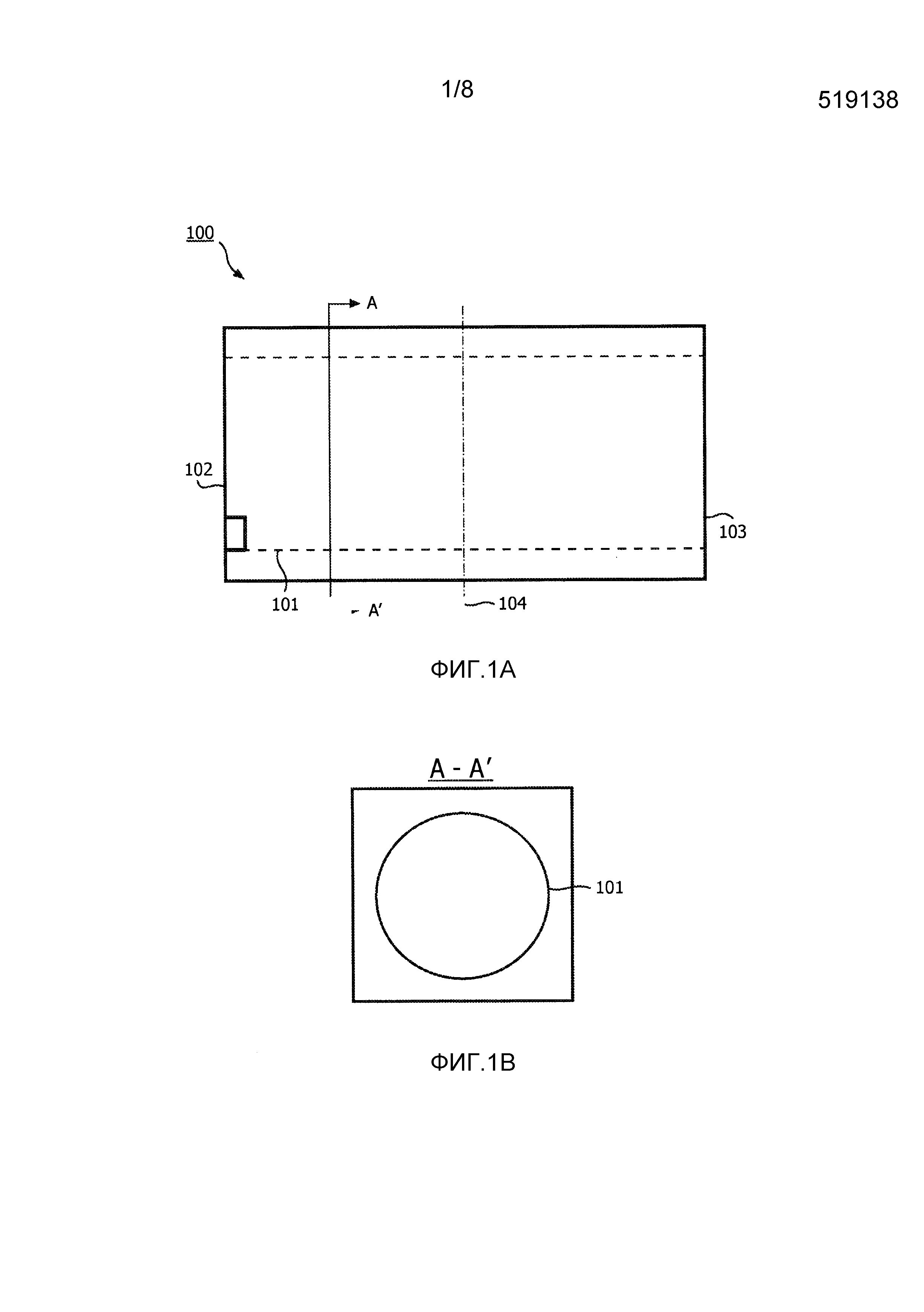
Фиг. 1A показывает схему примерного магнита MRI в соответствии с примерным вариантом осуществления изобретения.
Фиг. 1B показывает поперечное сечение примерного магнита MRI фиг. 1, взятое вдоль плоскости сечения A-A', в соответствии с примерным вариантом осуществления изобретения.
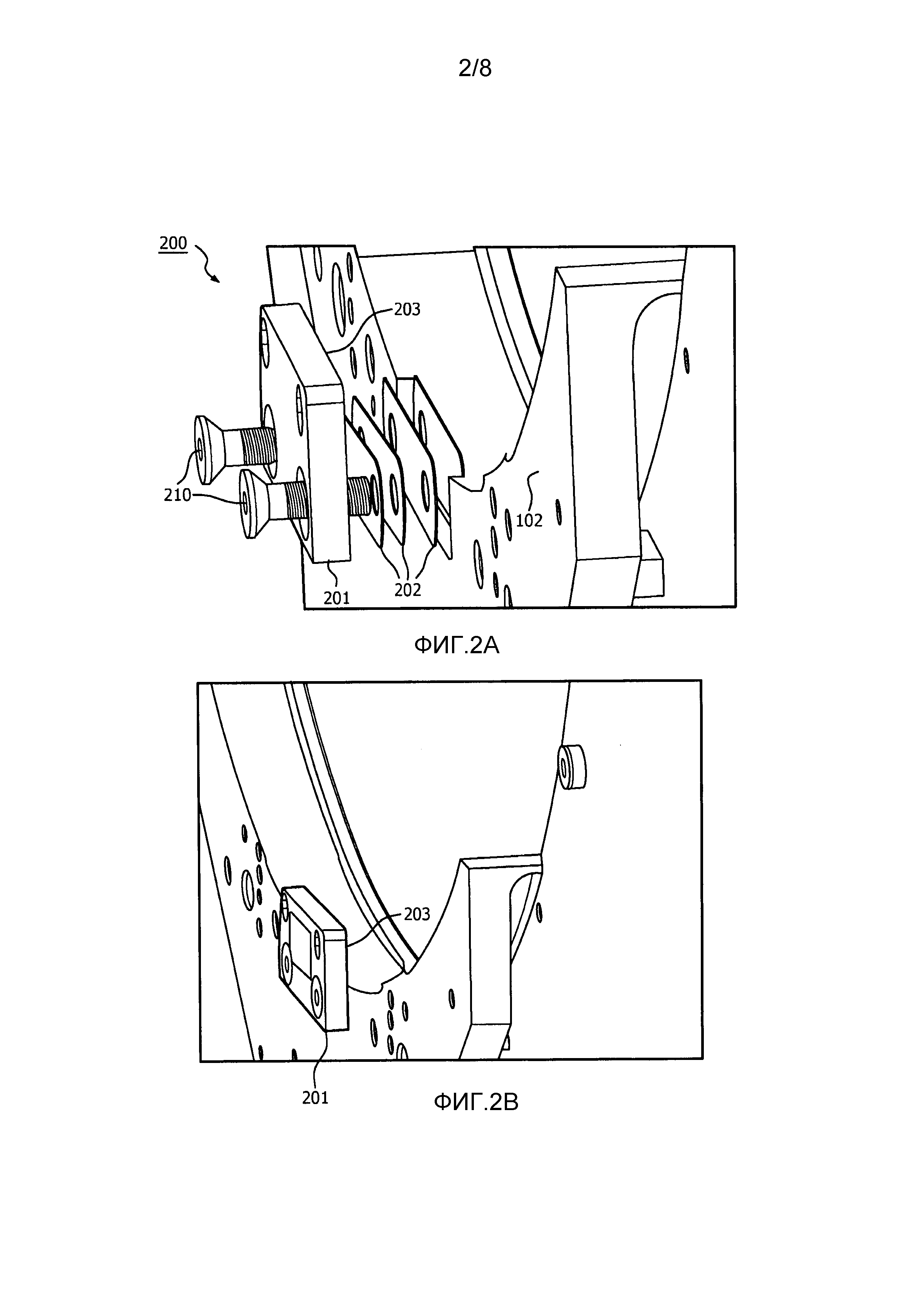
Фиг. 2A показывает изображение в разобранном виде сервисного конца примерного магнита MRI в соответствии с примерным вариантом осуществления изобретения.
Фиг. 2B показывает изображение в собранном виде сервисного конца примерного магнита MRI в соответствии с примерным вариантом осуществления изобретения.
Фиг. 3A показывает примерный вариант осуществления узла ручного маховика нониуса, используемого в примерной процедуре картирования в соответствии с примерным вариантом осуществления изобретения.
Фиг. 3B показывает примерный вариант осуществления картирующего гентри в соответствии с примерным вариантом осуществления изобретения.
Фиг. 3C показывает примерную схему картирующего гентри в соответствии с примерным вариантом осуществления изобретения.
Фиг. 4A показывает примерную схему примерной градиентной катушки в соответствии с примерным вариантом осуществления изобретения.
Фиг. 4B показывает поперечное сечение примерной градиентной катушки по фиг. 4A, взятое вдоль плоскости сечения B-B', в соответствии с примерным вариантом осуществления изобретения.
Фиг. 5 показывает примерный способ для размещения изоцентра градиентной катушки так, чтобы он совпадал с магнитным центром магнита MRI в соответствии с примерным вариантом осуществления изобретения.
Фиг. 6 показывает дополнительный примерный вариант осуществления картирующего гентри, используемого в способе в соответствии с примерным вариантом осуществления изобретения.
Фиг. 7 показывает примерный способ для коррекции перекоса в соответствии с примерным вариантом осуществления изобретения.
Примерные варианты осуществления могут быть лучше поняты со ссылкой на нижеследующее описание и прилагаемые чертежи, на которых подобные элементы обозначаются одинаковыми номерами позиций. Примерные варианты осуществления относятся к способу и системе для определения местоположения изоцентра градиентной катушки так, чтобы он совпадал с магнитным центром магнита MRI. Хотя примерные варианты осуществления описаны для устройства MRI визуализации, специалистам в области техники будет понятно, что системы и способы примерных вариантов осуществления изобретения могут использоваться в любой медицинской установке, такой как, например, устройство визуализации CT, PET, CAT и т.д.
Фиг. 1A показывает принципиальную схему примерного магнита 100 MRI в соответствии с примерным вариантом осуществления изобретения. Магнит 100 MRI включает в себя центральный туннель 101, который проходит продольно через всю длину магнита 100 MRI. Магнит 100 MRI также включает в себя два конца: сервисный конец 102 и конец 103 для пациента. Сервисный конец 102 служит областью, где врач или специалист по MRI управляет процедурами MRI. Как вариант, сервисный конец 102 может включать в себя соединение, которое осуществляет связь с удаленной сервисной станцией в удаленном месте. Конец 103 для пациента является концом, через который пациент помещается в центральный туннель 101. Магнит 100 MRI также включает в себя магнитный центр 104. Магнитный центр 104 является центром магнитного поля, генерируемого магнитом 100 MRI. Фиг. 1B показывает поперечное сечение магнита MRI на фиг. 1A в плоскости сечения A-A1. Кроме того, магнит 100 MRI может включать в себя ложе пациента (не показано), на котором лежит пациент во время проведения процедуры MRI. Ложе пациента как правило подвижно соединено с магнитом MRI для извлечения и помещения ложа из и обратно в центральный туннель 101 магнита MRI 100.
Фиг. 2А показывает изображение в разобранном виде сервисного конца 102 магнита 100 MRI в соответствии с примерными вариантами осуществления изобретения. В соответствии с примерным вариантом осуществления изобретения узел 200 стопорной планки съемным образом присоединен к сервисному концу 102. Например, узел 200 стопорной планки может быть съемным образом присоединен к сервисному концу 102 с помощью двух винтов 210 (как показано на фиг. 2A). Как вариант, съемное присоединение может быть выполнено с помощью клея (не показано). Следует отметить, что эти примеры являются просто примерными и что примерный вариант осуществления никоим образом не ограничивается такими присоединениями. Узел 200 стопорной планки содержит стопорную планку 201 и заранее заданное число прокладок 202. Например, узел 200 стопорной планки может включать в себя 24 прокладки с предварительно установленными 12-ю из этих прокладок. Альтернативно следует понимать, что узел 200 стопорной планки может включать в себя любое число прокладок 202. Стопорная планка 201 включает в себя контрольную поверхность 203, которая обращена к центральному туннелю 101 магнита MRI 100. Каждая прокладка 202 имеет заранее заданную толщину. Например, каждая прокладка может иметь толщину 0,5 мм. Однако следует понимать, что прокладки 202 могут быть больше или меньше чем 0,5 мм, и что этот пример только для примерных целей. Прокладки 202 предварительно установлены между стопорной планкой 201 и сервисным концом 102 магнита 100 MRI. Соответственно в примере выше, если 12 прокладок предварительно установлены между стопорной планкой 201 и сервисным концом 102, то контрольная поверхность 203 будет расположена с интервалом в 6 мм от сервисного конца 102 магнита 100 MRI. Большее количество прокладок 202 может быть добавлено или удалено для расположения контрольной поверхности 203 на требуемом расстоянии от сервисного конца 102 магнита 100 MRI. Следует отметить, что прокладки 202, имеющие одинаковую толщину, являются лишь примерными. В соответствии с дополнительным примерным вариантом осуществления прокладки 202 могут иметь различную толщину для предоставления большего числа величин общей толщины.
Фиг. 2B показывает изображение в собранном виде узла 200 стопорной планки на сервисном конце 102 магнита 100 MRI. В этом виде прокладки 202 не видны, потому что они расположены между стопорной планкой 201 и сервисным концом 102. Как видно на фиг. 2B, когда стопорная планка 201 присоединена, она проходит по направлению к центру центрального туннеля 101 так, что верхняя часть стопорной планки 201 перекрывает отверстие в центральный туннель 101 на сервисном конце 102 контрольной поверхностью 203, обращенной к туннелю.
Фиг. 3A и 3B показывают пример картирующего гентри 300, используемого для определения магнитного центра 104 магнита 100 MRI. Картирующий гентри 300 включает в себя ручной маховик 301 нониуса, который может быть повернут для перемещения камеры 302 (показанной на фиг. 3B) по направлению к концу 103 для пациента или сервисному концу 102 магнита 100 MRI. Процесс для определения магнитного центра 104 будет описан более подробно ниже.
Фиг. 3B показывает камеру 302, которая используется для определения магнитного центра 104 магнита 100 MRI, и крепление 305 гентри, к которому присоединен картирующий гентри 300. Крепление 305 гентри заменяет узел 200 стопорной планки и присоединяется к сервисному концу 102 во время процедуры картирования для определения магнитного центра 104. Крепление 305 гентри может быть соединено с сервисным концом 102 с использованием практически такого же средства, как обсуждалось выше в отношении узла 200 стопорной планки. Крепление 305 гентри включает в себя контрольную поверхность 303 гентри, которая аналогична контрольной поверхности 203 стопорной планки 201. Картирующий гентри 300 используется для снятия карты магнита 100 MRI для определения местоположения магнитного центра 104. Такая карта может быть показана пользователю в виде, например, схемы магнита 100 MRI с индикатором, показывающим местоположение магнитного центра 104. Следует отметить, однако, что карта может показываться пользователю любым другим способом, в том числе, например, в виде перечня размеров.
Как видно на фиг. 3C, камера 302 первоначально расположена на расстоянии L1 от контрольной поверхности 303 гентри. Это расстояние L1 может быть равно, например, 845 мм. Однако следует понимать, что расстояние L1 может быть любым расстоянием. Во время процедуры картирования ручной маховик 301 нониуса поворачивается для перемещения камеры 302 по направлению к концу 103 для пациента или сервисному концу 102 магнита 100 MRI. Расстояние, проходимое камерой 302 в результате приведения в действие ручного маховика 301 нониуса, будет определять число прокладок 202, которые будут размещены между контрольной поверхностью 203 стопорной планки 201 и сервисным концом 102 магнита 100 MRI.
Фиг. 4A и 4B показывают градиентную катушку 400 в соответствии с примерным вариантом осуществления изобретения. Градиентная катушка 400 спроектирована и имеет такую форму, чтобы она могла быть размещена в центральном туннеле 101 магнита 100 MRI. Градиентная катушка 400 имеет сервисный конец 402 и конец 403 для пациента, которые соответствуют сервисному концу 102 и концу 103 для пациента магнита 100 MRI. Градиентная катушка 400 имеет изоцентр 404, который находится на известном расстоянии L2 (например, 851 мм) от контрольной поверхности 401, расположенной на сервисном конце 402 градиентной катушки 400. Сервисный конец 402 включает в себя компоновку 405 для присоединения градиентной катушки 400 к стопорной планке 201. Примерные варианты осуществления изобретения могут обеспечить систему, устройство, компоновку и способ для совмещения изоцентра 404 с магнитным центром 104, когда градиентная катушка 400 установлена в пределах центрального туннеля 101 магнита 100 MRI. Это может быть достигнуто путем установки определенного числа прокладок 202 между стопорной планкой 201 и сервисным концом 102.
Фиг. 5 показывает способ 500 для совмещения изоцентра 404 с магнитным центром 104 в соответствии с примерным вариантом осуществления изобретения. На этапе 501 определяется магнитный центр 104 магнита 100 MRI с использованием картирующего гентри 300. Во время этого этапа узел 200 стопорной планки убирается, и вместо него устанавливается крепление 305 картирующего гентри. Первоначально камера 302 расположена на расстоянии L3 от контрольной поверхности 303 гентри. Предпочтительно камера 302 первоначально расположена в геометрическом центре магнита 100 MRI. Затем выполняется процедура картирования и определяется магнитный центр 104 магнита 100 MRI.
На этапе 502 определяется отрегулированное положение контрольной поверхности 203. В частности, поворачивается ручной маховик 301 нониуса (по часовой стрелке или против часовой стрелки) для перемещения камеры 302 так, чтобы разместить ее в определенном магнитном центре 104. Например, если магнитный центр 104 смещен на расстояние в 3,5 мм от геометрического центра по направлению к концу 103 для пациента, поворачивая ручной маховик 301 нониуса по часовой стрелке на 3Ѕ оборота можно продвинуть камеру 302 на 3,5 мм по направлению к концу 103 для пациента. С другой стороны, поворот маховика 301 нониуса против часовой стрелки передвинет камеру 302 по направлению к сервисному концу 102. В этом месте может быть снята конечная карта. Результирующее расстояние (то есть смещение), пройденное камерой 302 для размещения ее в магнитном центре 104, затем отмечается на контрольной поверхности 203 стопорной планки 201. Например, это смещение может быть вытравлено или выгравировано на контрольной поверхности 203. Следует отметить, однако, что может использоваться любое традиционное средство размещения указания на поверхности для указания этого смещения.
На этапе 503 картирующий гентри 300 и крепление 305 картирующего гентри снимаются, и заново устанавливается стопорная планка 201 с определенным числом прокладок 202. Определенное число прокладок 202 диктуется смещением, определенным на этапе 502. Соответственно в вышеупомянутом примере, если каждая прокладка равна 0,5 мм, а смещение равно 3,5 мм по направлению к концу 103 для пациента, то 7 из 12 предварительно установленных прокладок должны быть убраны, чтобы контрольная поверхность 203 продвинулась на 3,5 мм по направлению к концу 103 для пациента. Следует отметить, что эти размеры приведены только для примерных целей, и что эти размеры будут меняться в зависимости от конкретного используемого магнита 100 MRI и толщины прокладок 202.
Наконец, на этапе 504 градиентная катушка 400 размещается в центральном туннеле 101 магнита 100 MRI так, чтобы контрольная поверхность 403 градиентной катушки 400 находилась на одном уровне с контрольной поверхностью 203 стопорной планки 200. В этом положении изоцентр 404 градиентной катушки 400 совпадает с магнитным центром 104 магнита 100 MRI.
Фиг. 6 показывает примерную систему в соответствии с дополнительным примерным вариантом осуществления изобретения. Как показано на фиг. 6, картирующий гентри 600 может включать в себя индикатор 610, который может касаться и точно совмещаться с контрольной поверхностью 603. Например, кончик 601 индикатора 610 может быть расположен на расстоянии L1 от центра камеры 602, как показано на фиг. 6. Например, это расстояние может быть равно 844 мм. В соответствии с некоторыми примерными вариантами осуществления это расположение может быть фиксированным. Индикатор 610 также может быть съемным, чтобы гентри мог использоваться на магните 100 MRI с установленной градиентной катушкой 400. Предпочтительно имеется шкала 604, присоединенная к картирующему гентри 600, расположенная около ручного маховика 606 нониуса.
Фиг. 7 показывает дополнительный примерный вариант осуществления способа для корректировки перекоса в сочетании с картирующим гентри 600 на фиг. 6. Способ 700 может выполняться, когда градиентная катушка 400 установлена в центральном туннеле 101 магнита 100 MRI. Однако следует отметить, что этот способ может также выполняться для пустого магнита 100 MRI (то есть без градиентной катушки 400). Способ 700 может включать в себя, например, следующие этапы. На этапе 701, до установки крепления 305 гентри на сервисный конец 102 магнита 100 MRI, камера 602 может быть отведена на расстояние L4 от контрольной поверхности 603. Это может гарантировать, что когда гентри 600 закреплен, не будет никакого задевания индикатором 610 контрольной поверхности 603. На этапе 702 стопорная планка 201 и прокладки 202 могут быть убраны, если они установлены. На этапе 703 гентри 600 может быть установлен и закреплен на сервисном конце 102 магнита 100 MRI. На этапе 704 положение камеры 602 может быть отрегулировано так, чтобы кончик индикатора 601 едва касался контрольной поверхности 603. Это предпочтительно помещает камеру 602 в теоретическом геометрическом центре магнита 100 MRI. На этапе 705 показания на шкале 604 могут быть отмечены и записаны. После того, как перекос был скорректирован, положение магнитного центра 104 может быть определено в соответствии с примерным способом 500, описанным выше.
Хотя изобретение было показано и описано со ссылкой на конкретные примерные варианты осуществления, специалистам в области техники будет понятно, что изобретение не ограничивается ими, и что в нем могут быть сделаны различные изменения в форме и деталях, в том числе комбинации различных особенностей и вариантов осуществления, не отступая от сущности и объема изобретения.
Специалистам в области техники будет понятно, что вышеописанные примерные варианты осуществления могут быть реализованы разными способами, в том числе как отдельный программный модуль, как комбинация аппаратного и программного обеспечения и т.д. Например, процедура 500 картирования может быть программой, содержащей строки кода, которые после компиляции могут быть исполнены на процессоре. Программы могут находиться на долговременном компьютерно-читаемом носителе данных.
Следует отметить, что формула изобретения может включать в себя номера/цифры позиций в соответствии с правилом 6.2(b) договора о патентной кооперации (PCT). Однако настоящая формула изобретения не должна считаться ограниченной примерными вариантами осуществления, соответствующими номерам/цифрам позиций.
Специалистам в области техники будет очевидно, что в раскрытых примерных вариантах осуществления, способах и вариациях могут быть сделаны различные модификации, не отступая от сущности или объема раскрытия. Таким образом, подразумевается, что изобретение охватывает и модификации и вариации при условии, что они находятся в пределах прилагаемой формулы изобретения и ее эквивалентов.
Реферат
Использование: для магнитно-резонансной визуализации (MRI). Сущность изобретения заключается в том, что система магнитно-резонансной визуализации (MRI) включает в себя магнит MRI, включающий в себя туннель и имеющий магнитное поле, и градиентную катушку, расположенную в пределах туннеля и имеющую изоцентр. Первое местоположение в пределах магнита MRI определяется относительно первой заранее заданной контрольной поверхности магнита MRI, причем первое местоположение представляет собой центр магнитного поля. Второе местоположение в пределах градиентной катушки определяется относительно второй заранее заданной контрольной поверхности градиентной катушки, причем второе местоположение представляет собой изоцентр. Когда градиентная катушка установлена в пределах туннеля, вторая заранее заданная контрольная поверхность примыкает к первой заранее заданной контрольной поверхности. Первая заранее заданная контрольная поверхность выставляется в отрегулированное положение, причем отрегулированное положение определяется как функция первого местоположения и второго местоположения и соответствует положению первой заранее заданной контрольной поверхности, в котором первое местоположение совпадает со вторым местоположением, когда градиентная катушка установлена в пределах туннеля. Технический результат: обеспечение возможности создания более однородного магнитного поля при MRI и обеспечение возможности уменьшения силы, передаваемой на подвесную систему катушки. 2 н. и 12 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Расщепленная градиентная катушка и использующая ее гибридная рет/mr-система визуализации
Устройство магнитного резонанса с антенной системой возбуждения
Комментарии