Магнитно-резонансная (mr) визуализация с в1-отображением - RU2611082C2
Код документа: RU2611082C2
Чертежи



Описание
Изобретение относится к области магнитно-резонансной (MR) визуализации. Оно касается способов MR визуализации, по меньшей мере, участка тела. Изобретение также относится к MR устройству и компьютерной программе для выполнения на MR устройстве.
Способы формирования MR изображений, в которых используется взаимодействие между магнитными полями и ядерными спинами для формирования двумерных или трехмерных изображений, широко применяются в настоящее время, в частности в области медицинской диагностики, поскольку для визуализации мягких тканей они во многих отношениях превосходят другие способы визуализации, не требуют ионизирующего излучения и, как правило, являются неинвазивными.
Согласно MR способу, в общем случае, тело пациента, которое требуется обследовать, располагают в сильном, однородном магнитном поле (поле B0), направление которого в то же время определяет ось (обычно ось z) системы координат, на которой основано измерение. Магнитное поле B0 создает различные энергетические уровни для отдельных ядерных спинов в зависимости от напряженности магнитного поля, которые могут быть возбуждены (спиновый резонанс) путем наложения переменного электромагнитного поля (RF-поле, которое также называют B1 полем) определенной частоты (т.н. ларморовой частоты или MR частоты). С макроскопической точки зрения распределение отдельных ядерных спинов создает общую намагниченность, которая может отклоняться от состояния равновесия путем наложения электромагнитного импульса соответствующей частоты (RF импульса), когда магнитное поле проходит перпендикулярно оси z, так что вектор намагниченности совершает прецессионное движение вокруг оси z. Прецессионное движение описывает поверхность конуса, угол апертуры которого называют углом отклонения вектора намагниченности. Величина угла отклонения вектора намагниченности зависит от силы и продолжительности приложенного электромагнитного импульса. В случае т.н. 90°-импульса спины отклоняются от оси z к поперечной плоскости (угол отклонения вектора намагниченности составляет 90°).
По окончании RF импульса намагниченность релаксирует назад к исходному состоянию равновесия, при котором намагниченность в направлении оси z нарастает вновь согласно первой временной постоянной T1 (время спин-решеточной или продольной релаксации), а намагниченность в направлении, перпендикулярном направлению z, релаксирует согласно второй временной постоянной T2 (время спин-спиновой или поперечной релаксации). Изменение намагниченности может быть обнаружено с помощью одной или нескольких приемных RF катушек, расположенных и сориентированных в пределах объема обследования MR устройства так, что изменение намагниченности измеряется в направлении, перпендикулярном оси z. Затухание поперечной намагниченности сопровождается, после того как приложен, например, 90°-импульс, переходом ядерных спинов (индуцированным локальными неоднородностями магнитного поля) из упорядоченного состояния с одинаковой фазой в состояние, при котором все фазовые углы равномерно распределены (дефазировка). Дефазировка может быть скомпенсирована посредством перефокусирующего импульса (например, 180°-импульса). Это порождает эхо-сигнал (спиновое эхо) в приемных катушках.
Для осуществления пространственного разрешения в теле на однородное магнитное поле накладываются линейные градиенты магнитного поля, направленные вдоль трех главных осей, что приводит к линейной пространственной зависимости частоты спинового резонанса. Сигнал, принятый в приемных катушках, в этом случае содержит компоненты различных частот, которые можно связать с различными местоположениями в теле. Данные сигнала, полученные посредством приемных катушек, соответствуют пространственно-частотной области и носят название данных k-пространства. В число данных k-пространства обычно входят множество линий, полученных с использованием различного фазового кодирования. Каждая линия оцифровывается путем получения множества образцов. Набор данных k-пространства преобразуется в MR изображение посредством преобразования Фурье.
Обычно требуется, чтобы сгенерированное распространяемое RF-поле (B1+ поле) обладало относительной равномерностью и однородностью для возбуждения магнитного резонанса по сечению и/или в объеме визуализируемого тела пациента. Однако с увеличением MR-частоты, когда увеличивается напряженность основного магнитного поля, это усложняется вследствие потерь проводимости и влияния длины волны в теле пациента. Следовательно, точное измерение пространственного распределения передаваемого RF-поля является важным для многих сфер применения MR визуализации для поддержки соответствующей проводимой в будущем (в соответствующих случаях) и ретроспективной коррекции/компенсации. Это требует использования надежной и быстрой технологии B1-отображения.
K. Nehrke и P. Boernert (Proc. ISМRM 19, 2011, стр. 4411) предложили технологию B1-отображения с использованием подготовительного импульса Блоха-Зигерта на основе STEAM (STEAM-based Bloch-Siegert preparation pulse). В отличие от традиционно применяемого способа двойного угла и других способов, построенных на основе использования амплитуды сигнала, он кодирует B1-информацию в фазу MR сигнала, что позволяет получить важные преимущества в плане скорости получения данных, точности и надежности. Согласно известной технологии подход к B1-отображению по Блоху-Зигерту комбинируется с последовательностью стимулированных эхо-сигналов (STEAM) для MR визуализации. В процессе подготовительного периода последовательности стимулированных эхо-сигналов прикладывается нерезонансный RF импульс Блоха-Зигерта, т.е. между двумя резонансными подготовительными RF импульсами. Таким образом, фазовый сдвиг Блоха-Зигерта, вызванный неоднородностью B1, сохраняется вдоль продольной оси. Быстрое считывание множества стимулированных эхо-сигналов обеспечивается посредством считывания RF импульсов, приложенных в период получения последовательности. Главное преимущество данного известного подхода заключается в том, что уровень SAR может сохраняться низким. Кроме того, последовательность стимулированных эхо-сигналов по своей природе надежна в отношении химического сдвига и артефактов восприимчивости, что обеспечивает возможность осуществления передовых схем получения, таких как EPI.
Однако недостаток известной подготовительной последовательности Блоха-Зигерта на основе STEAM заключается в том, что определение B1-отображения основано на двух отдельных повторениях, при этом получение MR сигналов осуществляется с положительным и отрицательным сдвигом частоты RF импульса Блоха-Зигерта соответственно. Выполнение этого требования проблематично в абдоминальном B1-отображении, поскольку перистальтические движения приводят к сдвигам фаз между поочередными повторениями последовательности. Данная необходимость в двойном повторении сохраняется также для подходов B1-отображения на основе «чистой» STEAM-последовательности, при которой STEAM-последовательность выполняется дважды с использованием разных углов отклонения вектора намагниченности для подготовки намагниченности (см.: Helms G, Finsterbusch J, Weiskopf N, Dechent P. Rapid radiofrequency field mapping in vivo using single-shot STEAM MRI. Magn. Reson. Med. 2008;60:739-43).
В статье «Stimulated echoes and spin echoes. Simultaneous determination of T2, diffusion coefficient and RF homogeneity», J. Magn. Res. B101(1993)28-34, C.J.R. Counsell, упоминается о том, что пространственная однородность угла отклонения вектора намагниченности, а значит и в B1-поле, связана с комбинациями эхо-сигналов. Однако этот известный подход требует полного перефокусирующего импульса после каждого считывания эхо-сигналов.
Необходимость в повторении приводит к огромным картам B1-отображения. Кроме того, временной интервал между двумя отдельными повторениями, необходимый для релаксации T1, может составлять порядка нескольких секунд, а значит, может приводить к чрезмерному увеличению времени сканирования. Помимо этого, подготовительные импульсы стимулированного эха известной последовательности сами характеризуются существенно нелинейным поведением угла отклонения вектора намагниченности. Этот недостаток ограничивает динамический диапазон известного подхода по B1-отображению.
Из вышесказанного ясно, что требуется усовершенствованный способ B1-отображения.
Согласно изобретению раскрыт способ MR визуализации, по меньшей мере, участка тела, помещенного в объеме обследования MR устройства. Способ содержит этапы:
подвергание участка тела воздействию визуализирующей последовательности RF импульсов и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность стимулированных эхо-сигналов, включающую в себя:
i) по меньшей мере, два подготовительных RF импульса, излучаемых в направлении участка тела в течение подготовительного периода, а также
ii) один или более RF импульсов считывания, излучаемых в направлении участка тела в течение периода получения, следующего по времени за подготовительным периодом;
получение одного или более FID-сигналов, а также одного или более стимулированных эхо-сигналов в течение периода получения; а также
получение B1-отображения, указывающего пространственное распределение RF-поля RF импульсов в пределах участка тела из полученных FID- и стимулированных эхо-сигналов. Сущность изобретения заключается в приложении одного или более RF импульсов считывания в течение периода получения последовательности стимулированных эхо-сигналов, при этом получение FID-сигналов и стимулированных эхо-сигналов осуществляется квазиодновременно. Одно MR изображение может быть реконструировано из FID-сигналов, а другое MR изображение может быть реконструировано из стимулированных эхо-сигналов. После того как MR изображение реконструировано, B1-отображение может быть получено из отношения повоксельных интенсивностей двух MR изображений, реконструированных из FID- и стимулированных эхо-сигналов соответственно.
Вообще, последовательность стимулированных эхо-сигналов содержит три (например, 60° или 90°) RF импульса, при этом первые два RF импульса являются подготовительными импульсами. Первый подготовительный RF импульс возбуждает магнитный резонанс и преобразует продольную ядерную намагниченность в поперечную ядерную намагниченность. Второй подготовительный RF импульс "сохраняет" долю дефазированной поперечной ядерной намагниченности вдоль продольной оси. В случае 90° RF импульсов эта доля составляет почти половину дефазированной поперечной намагниченности. Третий RF импульс прикладывается в процессе периода получения, следующего по времени за подготовительным периодом. Третий RF импульс ("RF импульс считывания") снова преобразует сохраненную продольную ядерную намагниченность в поперечную ядерную намагниченность, тем самым генерируя т.н. стимулированное эхо. Этой последовательностью из трех RF импульсов генерируются другие RF перефокусированные эхо-сигналы, но в данном случае они не представляют интереса и могут подавляться соответствующими режимами переключения градиентов, проводимыми параллельно с RF излучением. MR сигнал стимулированного эха совместно с FID-сигналом, который также генерируется третьим RF импульсом, принимается и используется для B1-отображения согласно изобретению. MR визуализация на основе стимулированных эхо-сигналов может быть ускорена путем замены третьего RF импульса серией RF импульсов считывания с малыми углами отклонения вектора намагниченности, при этом каждый RF импульс считывания перефокусирует только малую часть продольной ядерной намагниченности, сохраненной после подготовительного периода.
Следует отметить, что эти, по меньшей мере, два подготовительных RF импульса, используемые для сохранения B1-кодированной намагниченности вдоль оси z, не обязательно должны быть одного вида, а углы отклонения вектора намагниченности одинаковыми. Однако с учетом математической обработки, необходимой для оценки измерительной информации, выбор идентичных RF импульсов и углов отклонения вектора намагниченности существенно упрощает формальную математическую трактовку. В частности, когда угол отклонения вектора намагниченности подготовительных RF импульсов одинаков, а угол отклонения вектора намагниченности RF импульсов считывания отличен от угла подготовительных RF импульсов, угол отклонения вектора намагниченности RF подготовки исчезает в соотношении FID- и стимулированных эхо-сигналов.
Важный аспект изобретения заключается в том, что угол отклонения вектора намагниченности RF импульсов считывания приводит к равному весовому коэффициенту T2* одного или более FID-сигналов (I1) и стимулированных эхо-сигналов, а также одного или более стимулированных эхо-сигналов (I2) в процессе периода (22) получения. А именно, RF импульсы считывания полностью не перефокусируют FID и стимулированные эхо-сигналы и чередуются по времени так, чтобы достичь равных весовых коэффициентов T2*. Приемлемый предел равного T2*-взвешивания может быть определен из уровня артефакта изображения, обусловленного остаточными сигналами, когда T2*-эффекты FID- и стимулированных эхо-сигналов полностью не исчезают. Предпочтительно RF импульсы считывания упорядочены так, что в FID-сигнале преобладает т.н. «нетронутая» составляющая FID-сигнала над перефокусированными компонентами FID- сигнала. Это избавляет от необходимости выполнения дополнительной перефокусировки после считывания FID- и стимулированных эхо-сигналов. Таким образом, время получения сигналов сокращается, позволяя провести сканирование для составления полного B1-отображения всего за несколько секунд. Это позволяет скорректировать B1-отображение, например, в течение задержки дыхания пациента. Кроме того, поскольку после считывания FID- и стимулированных эхо-сигналов перефокусировка не требуется, SAR-«нагрузка» сохраняется на низком уровне.
Поскольку B1-отображение может быть получено путем единственного повторения визуализирующей последовательности согласно изобретению, оно более устойчиво против движений по сравнению с другими известными подходами к B1-отображению на основе STEAM. Скорость B1-отображения увеличивается, по меньшей мере, вдвое по сравнению с известными технологиями.
Для генерирования полного B1-отображения требуется получить множество FID-сигналов и стимулированных эхо-сигналов с соответствующим фазовым кодированием. Для этой цели предпочтительно могут быть использованы эффективные схемы выборки, такие как EPI, параллельная визуализация или сжатое зондирование в сочетании с изобретением.
Кроме того, технология по изобретению обладает повышенным динамическим диапазоном по сравнению с известными подходами. Это является результатом иного механизма отображения по изобретению. Помимо этого, по сравнению с подходом Блоха-Зигерта на основе STEAM уровень SAR по изобретению существенно снижен по причине исключения RF импульса Блоха-Зигерта.
Согласно предпочтительному варианту осуществления изобретения FID- и стимулированных эхо-сигналы получают в качестве градиент-восстановленных эхо-сигналов. Синхронизация последовательности может быть отрегулирована так, что эффекты, обусловленные восприимчивостью и химическим сдвигом, по существу равны и для FID-, и для стимулированных эхо-сигналов.
Согласно другому предпочтительному варианту осуществления изобретения B0-отображение, указывающее пространственное распределение основного магнитного поля в пределах участка тела, также получают из полученных FID- и стимулированных эхо-сигналов. Оказывается, что, используя соответствующие параметры визуализирующей последовательности, не только B1-отображение, но также и B0-отображение может быть получено из повоксельных интенсивностей FID- и стимулированных эхо-сигналов. Преимущество изобретения заключается в том, что B1-отображение и B0-отображение могут быть получены одновременно без дополнительных этапов измерений.
Согласно другому предпочтительному варианту осуществления изобретения приемно-передаточное фазовое отображение, указывающее пространственное распределение фазы RF поля приема/передачи в пределах участка тела, также получают из полученных FID- и стимулированных эхо-сигналов. Оказывается, что, используя соответствующие параметры визуализирующей последовательности, не только B1- и B0-отображения, но также и приемно-передаточное фазовое отображение может быть получено из повоксельных интенсивностей FID- и стимулированных эхо-сигналов. Дополнительное преимущество изобретения заключается в том, что B1-отображение, B0-отображение и приемно-передаточное фазовое отображение могут быть получены одновременно без дополнительных этапов измерений.
Согласно другому предпочтительному варианту осуществления изобретения параметры визуализирующей последовательности (например, время появления эхо-сигналов, величина градиента) выбираются так, что вклады сигналов от спинов воды и вклады сигналов от спинов жира по существу совпадают по фазе в FID-сигналах и в стимулированных эхо-сигналах. Это делает технологию устойчивой к воздействию химических сдвигов.
Согласно еще одному предпочтительному варианту осуществления изобретения параметры визуализирующей последовательности (например, время появления эхо-сигналов, величина градиента) выбираются так, что вклады сигналов от спинов воды и вклады сигналов от спинов жира накладываются в FID-сигналах и в стимулированных эхо-сигналах так, чтобы обеспечить реконструкцию отдельных MR изображений воды и жира. Это позволяет использовать технологию для разделения жир-вода.
Согласно еще одному предпочтительному варианту осуществления изобретения предложенный подход может использоваться для объемного B1-отображения и параллельной передачи данных.
Для объемного отображения предпочтительна мультислайсовая версия предложенной технологии. В ней представляется полезным соответствующий порядок срезов (например, измерение нечетных срезов в 3D наборе на первом этапе, а затем четных на последующем этапе измерения), чтобы избежать возможных перекрестных помех срезов. Для облегчения оценки сигналов, как описано ниже, два подготовительных RF импульса последовательности стимулированных эхо-сигналов могут возбудить более широкий срез (предпочтительно с толщиной среза, увеличенной вдвое), чем RF импульсы считывания. Это помогает избежать проблем, связанных с несовершенным возбуждением профиля среза в оценке сигнала для B1-отображения.
Согласно предпочтительному варианту осуществления изобретения RF импульсы излучаются в направлении участка тела посредством двух или более RF-катушек или наборов RF-катушек, при этом B1-отображение получают из полученных FID- и стимулированных эхо-сигналов для каждой RF-катушки или каждого набора RF-катушек, причем каждое B1-отображение указывает пространственное распределение RF-поля RF импульсов, излучаемых посредством соответствующей RF-катушки или соответствующего набора RF-катушек. В данном варианте осуществления изобретения B1-отображение выполняется для множества RF-передающих элементов (RF-катушек) используемого MR устройства для отображения их соответствующих чувствительностей передачи. Согласно способу по изобретению индивидуальное отображающее сканирование должно выполняться для каждого отдельного RF-передающего элемента (или их комбинации). Во избежание проблем насыщения сигнала применительно к одиночным срезам должна использоваться соответствующая задержка. Временной порядок индивидуальных отображающих сканирований предпочтительно может оптимизироваться согласно соответствующим областям передачи, покрываемым соответствующими RF-передающими элементами, тем самым сводя к минимуму общее время сканирования. В случае объемного B1-отображения мультислайсовое/многоканальное отображение может оказаться предпочтительным в определенных случаях практического применения. В этом случае чувствительность передачи индивидуальных каналов отображается в индивидуальных смежных срезах, расположенных достаточно близко друг к другу, чтобы рассматриваться как представляющие соответствующее местоположение. Таким образом, B1-отображение для множества каналов передачи можно сделать даже более эффективным.
B1-отображения, полученные согласно изобретению, предпочтительно могут использоваться в последующих визуализирующих сканированиях для RF-шиммирования. RF-шиммирование относится к обеспечению пространственной однородности RF-поля передачи путем регулировки комплексной амплитуды RF импульсов, излученных посредством индивидуальных RF-катушек системы MR визуализации параллельной передачи. В простых известных подходах к RF-шиммированию используются заданные, определяемые общей анатомией наборы RF-шиммов, без учета индивидуальных анатомических особенностей пациента. Изобретение позволяет обеспечить более прогрессивный подход к RF-шиммированию, оптимизирующий установку RF-шиммов в соответствии с особенностями пациента. Для этой цели получают B1-отображения для индивидуальных передающих RF-катушек из FID- и стимулированных эхо-сигналов вышеописанным способом, после чего из B1-отображений с помощью численных способов (по существу известных) получают оптимальные наборы RF-шиммов.
В случае MR визуализации грудной клетки и брюшной полости можно ожидать динамических изменений RF-поля, вызванных движением (например, дыхательными движениями пациента), поскольку индуцированные движением смещения анатомических структур потенциально влияют на объемную проводимость и диэлектрическую проницаемость. Следовательно, установочные параметры RF-шиммирования, полученные, например, из единственного калибровочного скана, могут ухудшаться, если последующее диагностическое MR-визуализирующее сканирование выполняется в ином положении или состоянии движения пациента. Это может потенциально влиять на контраст MR изображения и удельное поглощение (SAR) применяемой визуализирующей импульсной последовательности.
С учетом этого способ по изобретению может дополнительно содержать этапы:
- подвергание участка тела воздействию навигационной последовательности, содержащей один или более RF импульсов и переключаемых градиентов магнитного поля, при этом навигационная последовательность прикладывается, по меньшей мере, один раз до, в процессе или после последовательности стимулированных эхо-сигналов, в результате чего получают навигационные сигналы из участка тела,
получение данных о движении из навигационных сигналов, при этом данные о движении отражают движение тела; а также
назначение состояния движения, полученного из данных о движении, B1-отображению.
Навигационная последовательность в понимании изобретения представляет собой, в общем, сканирующую последовательность, которая может быть использована для определения и получения данных о движении. Посредством навигационной последовательности, по существу известной в данной области техники, обычно получают данные с низким разрешением одно-, двух- или трехмерного объема для измерения переноса анатомической структуры вдоль, по меньшей мере, одной координатной оси и/или вращения анатомической структуры вокруг, по меньшей мере, одной координатной оси. Эти данные о движении могут использоваться согласно изобретению для назначения B1-отображения (каждой передающей RF-катушки) состоянию движения пациента. Предпочтительно в процессе повторений последовательности стимулированных эхо-сигналов и навигационной последовательности из FID- и стимулированных эхо-сигналов получают множество B1-отображений, при этом каждое B1-отображение назначается иному состоянию движения пациента. Согласно данному варианту осуществления в изобретении предложено использовать возможность RF-шиммирования в режиме реального времени усовершенствованных систем MR визуализации с параллельной передачей, чтобы адаптировать установочные параметры RF-шиммирования динамически согласно состоянию движения (например, фазе дыхательного цикла). С этой целью согласно технологии по изобретению в B1 калибровочном скане могут быть получены B1-отображения, разрешенные относительно состояния движения, при этом навигационные последовательности используются для идентификации состояния движения.
Согласно дополнительному предпочтительному варианту осуществления изобретения, по меньшей мере, каждый из двух подготовительных RF импульсов имеет угол отклонения вектора намагниченности, составляющий 45°-90°. Таким образом, амплитуды полученных стимулированных эхо-сигналов максимально увеличены, что предпочтительно с точки зрения отношения сигнал-шум.
Согласно другому предпочтительному варианту осуществления изобретения множество FID- и MR сигналов стимулированного эха генерируется посредством множества последовательных RF импульсов считывания, при этом каждый имеет угол отклонения вектора намагниченности менее 90°, предпочтительно менее 45°, наиболее предпочтительно менее 30°. Как упоминалось выше, серия RF импульсы считывания, имеющих малые углы отклонения вектора намагниченности, могут использоваться для достижения быстрого считывания множества FID- и стимулированных эхо-сигналов. По возможности наиболее короткое время появления эхо-сигналов может использоваться для того, чтобы минимизировать T2*-релаксации.
Согласно еще одному предпочтительному варианту осуществления изобретения в процессе подготовительного периода после двух подготовительных RF импульсов прикладываются переключаемые градиенты магнитного поля, чтобы устранить остаточную ядерную намагниченность.
Точная оценка удельного коэффициент поглощения (SAR) RF мощности в процессе MR визуализация жизненно необходима для обеспечения безопасности пациента, особенно если используются локальные группы передающих RF-катушек. При использовании таких локальных групп передающих катушек обычно требуется контролировать динамическое изменение относительного положения RF-катушки и ткани тела пациента в процессе MR-визуализирующего сканирования, чтобы гарантировать безопасную работу передающих RF-катушек. Для оценки безопасности пациента обычно выполняется имитация SAR с целью построения индивидуальных моделей для организма, и результаты сохраняются в таблицах или базе данных. Однако следует учитывать, что локальные «горячие точки» SAR, в общем, зависят от пациента, а также зависят от движения, обусловленного дыханием и другими видами движения тела.
Следовательно, согласно предпочтительному варианту осуществления изобретения локальное значение удельного коэффициент поглощения (SAR) RF-излучения в пределах участка тела оценивается из B1-отображения, полученного вышеописанным способом. Найденное значение SAR далее предпочтительно может использоваться для управления амплитудой и фазой RF импульсов, излучаемых в направлении участка тела, например в процессе последующего диагностического MR-визуализирующего сканирования. Данное управление может выполняться так, чтобы соответствовать ограничениям по условиям безопасности.
В то время как SAR для всего тела или его части можно оценить из утвержденной мощности передающей RF-катушки для тела и подвергаемой воздействию массы тела, влияние движения тела, вызванного дыханием и внутренним движением органов, пренебрежимо мало. Для локальных групп передающих RF-катушек, наоборот, влияние на локальные значения SAR, вызванные движением, повышено и может контролироваться и управляться согласно изобретению. Управление SAR в действительности является главным вопросом в контексте локальной параллельной RF-передачи в отношении безопасности пациента. Дополнительные степени свободы, доступные в локальной параллельной RF-передаче, затрудняют прямые глобальные и/или локальные оценки SAR, связанные с дыханием и движением тела пациента. В изобретении предложено динамически контролировать B1-распределение, генерируемое группой передающих RF-катушек, при этом RF-передатчики, используемые для управления передающими RF-катушками, могут корректироваться по каналу обратной связи в процессе или до MR-визуализирующего сканирования.
Предложенный способ, в частности, предпочтителен для параллельного использования группы локальных RF-катушек в сочетании с группой приемных RF-катушек, отличных от группы передающих RF-катушек. B1 экранирование, вызванное приемными RF-катушками, может автоматически контролироваться и корректироваться с помощью способа по изобретению.
Согласно дополнительному предпочтительному варианту осуществления изобретения в течение периода получения осуществляется получение двух стимулированных эхо-сигналов, предпочтительно прямого стимулированного эхо-сигнала и сопряженного стимулированного эхо-сигнала. Предпочтительно прямой стимулированный эхо-сигнал и сопряженный стимулированный эхо-сигнал получают в качестве градиент-восстановленных эхо-сигналов. Данный вариант осуществления изобретения позволяет получить B0-отображение на коротком эффективном интервале спектральной выборки, тем самым уменьшая нежелательное свертывание фаз. Способ по изобретению - возможный кандидат на глобальное подготовительное сканирование в MR визуализации, поскольку он может использоваться для получения B1/B0-отображений, а также получения информации о чувствительности катушек (которая полезна для технологий параллельной визуализации, таких как SENSE). Оказывается, что получение прямого стимулированного эхо-сигнала и сопряженного стимулированного эхо-сигнала является предпочтительным для получения дополнительной информации о композиции жир-вода в обследуемом участке тела. Кроме того, получение прямого стимулированного эхо-сигнала и сопряженного стимулированного эхо-сигнала поддерживает схему получения с T2-компенсацией.
Технология B1-отображения на основе стимулированного эха по изобретению позволяет получить B1-отображение в однократной последовательности стимулированных эхо-сигналов продолжительностью около 100 мс, что позволяет сделать данный подход способным работать в масштабе реального времени, как упоминалось выше. Однако следует учитывать, что последовательности MR импульсов с малым временем повторения (т.е. TR«T2, T1) обычно приводит к установлению стационарного состояния, при котором множество связанных траекторий вносят свой вклад в измеренную поперечную намагниченность. Принцип B1-отображения согласно изобретению основан на предположении, что подготовительный период последовательности стимулированных эхо-сигналов начинается от состояния теплового равновесия. Следовательно, время повторения последовательности в динамическом B1-отображающем сканировании или B1-калибровочном сканировании параллельной передачи должно быть порядка нескольких T1 во избежание возможного снижения точности способа. Если предположить, что обычная продолжительность времени T1 продольной релаксации ядерного спина составляет одну секунду, а продолжительность B1-отображающего сканирования согласно изобретению составляет около 200 мс, становится ясно, что только малая доля общего времени получения может в действительности использоваться для сканирования одной и той же локальной области участка тела пациента.
Чтобы преодолеть это ограничение, последовательность стимулированных эхо-сигналов по изобретению может повторяться несколько раз, при этом время повторения короче времени T1 продольной ядерной, при этом два подготовительных RF импульса имеют разность фаз, изменяемую после каждого повторения последовательности стимулированных эхо-сигналов. Таким образом, образуется стационарное состояние ядерной намагниченности. Одновременно путем изменения разности фаз двух подготовительных RF импульсов при каждом повторении последовательности стимулированных эхо-сигналов достигается эффективная модуляция MR-сигналов. Это приводит к устранению нежелательной связанности с предшествующими возбуждениями. Следовательно, только намагниченность, восстановленная T1-релаксацией в процессе последнего периода повторения, вносит свой вклад в FID- и стимулированные эхо-сигналы, при этом индивидуальные MR сигналы, сгенерированные поочередными повторениями последовательности, становятся в значительной степени независимыми друг от друга. Следовательно, технология B1-отображения по изобретению может применяться с временем повторения, которое меньше времени T1 продольной релаксации. Например, время повторения может составлять менее 0,5 T1 или даже менее 0,1 T1.
В дополнительном предпочтительном варианте осуществления изобретения разность фаз двух подготовительных RF импульсов дискретно изменяется на заданную величину приращения фазы после каждого повторения последовательности стимулированных эхо-сигналов. Оказывается, что оптимальное подавление нежелательной связанности MR сигнала может достигаться путем линейного дискретного изменения разности фаз двух подготовительных RF импульсов при каждом повторении последовательности стимулированных эхо-сигналов. В этом случае разность фаз двух подготовительных RF импульсов на n-ом этапе повторения равна n×ΔΦ, при этом ΔΦ - величина приращения фазы. Оптимальная величина приращения фазы составляет от 80° до 100°, предпочтительно 90°. Величина приращения фазы, равная 90°, обеспечивает оптимальную точность в технологии B1-отображения по изобретению.
В дополнительном предпочтительном варианте осуществления изобретения осуществляется получение FID-сигнала два или более раз в качестве градиент-восстановленных эхо-сигналов в различные моменты времени появления эхо-сигналов. В качестве альтернативы или дополнительно также может осуществляться получение стимулированного эхо-сигнала два или более раз в качестве градиент-восстановленных эхо-сигналов в различные моменты времени появления эхо-сигналов. Это легко достигается путем продления соответствующих градиентов считывания и переключения их полярности. В данном предпочтительном варианте осуществления изобретения B1-отображение остается по существу незатронутым. Незначительно увеличивается лишь время появления эхо-сигналов, а значит, влияние T2. Разделение вода-жир и B0-отображение могут выполняться на основе амплитуд и фаз двух или более измеренных FID- и стимулированных эхо-сигналов с использованием по существу известных технологий Диксона или m-технологий Диксона (см. Eggers и др., MRM 2011, 65, 96-107). Интервал получения эха между измеренными FID- и/или стимулированными эхо-сигналами по существу может выбираться произвольно.
Описанный способ по изобретению может осуществляться посредством MR устройства, включающего в себя, по меньшей мере, одну катушку главного магнита для генерирования однородного постоянного магнитного поля в пределах объема обследования, множество градиентных катушек для генерирования переключаемых градиентов магнитного поля в различных пространственных направлениях в пределах объема обследования, по меньшей мере, одну RF-катушку для генерирования RF импульсов в пределах объема обследования и/или для приема MR сигналов от тела пациента, расположенного в объеме обследования, блок управления, предназначенный для управления временной последовательностью RF импульсов и переключаемых градиентов магнитного поля, а также блок реконструкции изображения, предназначенный для реконструкции MR изображения из полученных MR сигналов. Способ по изобретению предпочтительно реализуется путем соответствующего программирования блока реконструкции изображения и/или блока управления MR устройства.
Способы изобретения предпочтительно могут осуществляться на большинстве MR устройств, применяемых в клинической практике в настоящее время. Для этого достаточно использовать компьютерную программу, с помощью которой MR устройство управляется так, чтобы выполнить вышеуказанные этапы способа по изобретению. Компьютерная программа может находиться либо на носителе данных, либо присутствовать в сети передачи данных, чтобы загружаться для установки в блоке управления MR устройства.
Прилагаемые чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Следует, однако, понимать, что чертежи представлены лишь в целях иллюстрации, но не для обозначения границ изобретения. На чертежах:
на Фиг. 1 схематично показано MR устройство для осуществления способов по изобретению;
на Фиг. 2 показано схематичное изображение визуализирующей последовательности согласно изобретению;
на Фиг. 3 показаны B1-отображения, полученные и рассчитанные согласно изобретению;
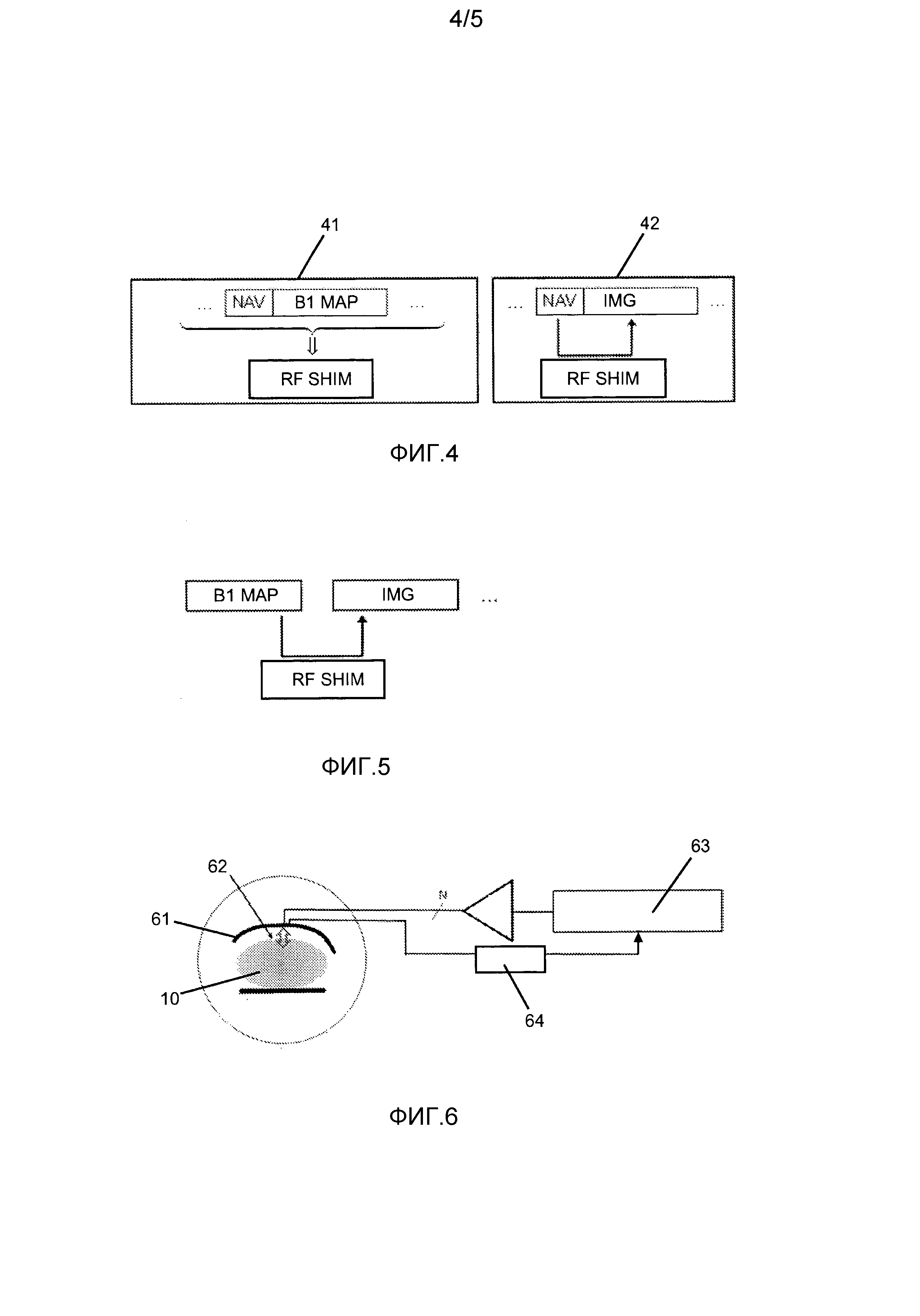
на Фиг. 4 показано приложение способа по изобретению в сочетании с навигаторами;
на Фиг. 5 показано альтернативное приложение способа по изобретению в сочетании с RF-шиммированием;
на Фиг. 6 показано приложение способа по изобретению для мониторинга SAR;
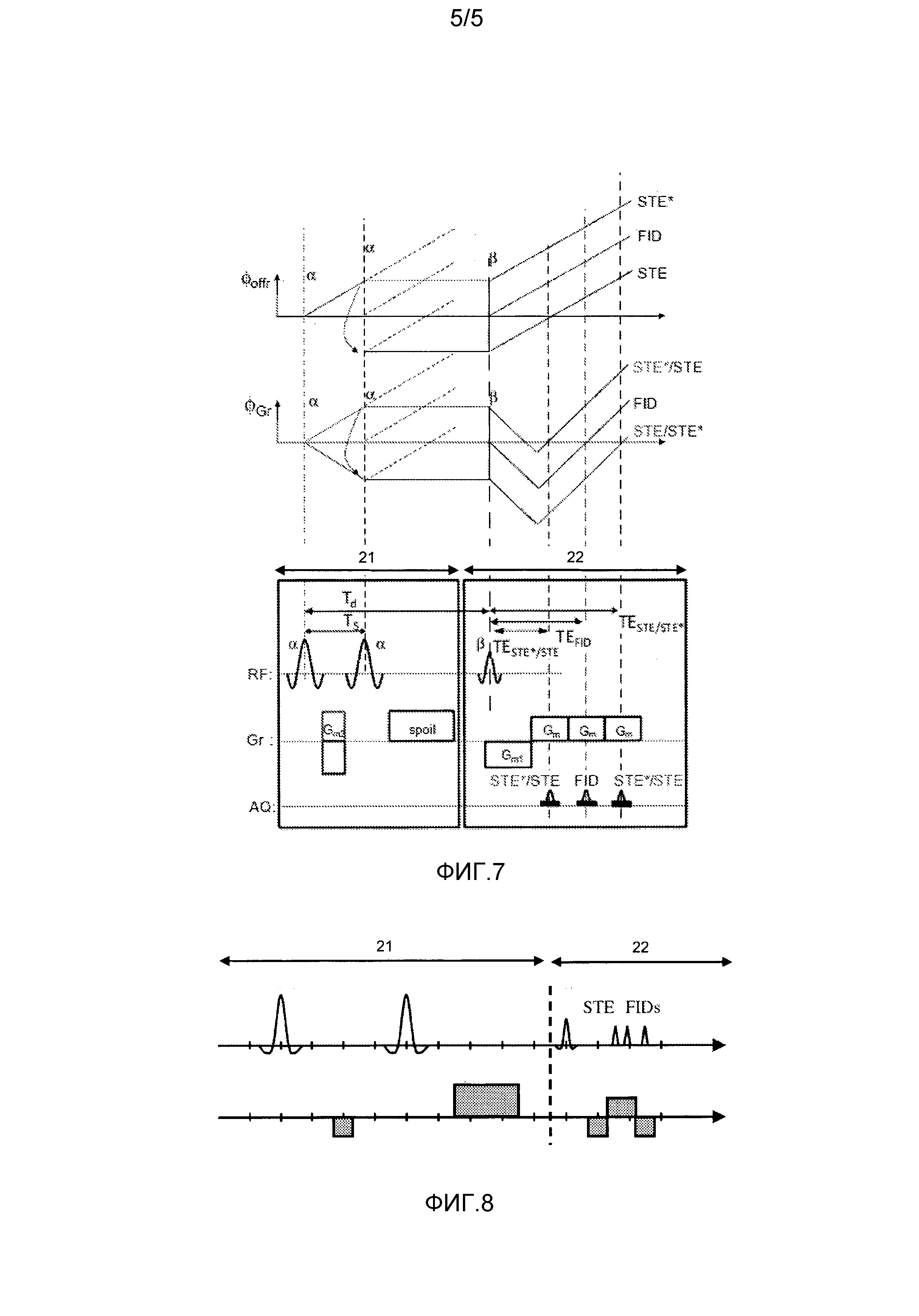
на Фиг. 7 показано схематичное изображение визуализирующей последовательности согласно другому варианту осуществления изобретения, при котором получают прямые и сопряженные стимулированные эхо-сигналы;
на Фиг. 8 показано схематичное изображение дополнительного варианта осуществления визуализирующей последовательности согласно изобретению, в котором FID-сигнал измеряется дважды в различные моменты времени появления эхо-сигналов.
На Фиг. 1 показано MR устройство 1. Устройство содержит сверхпроводящие или резистивные катушки 2 главного магнита, так чтобы создавалось по существу однородное, постоянное во времени основное магнитное поле B0 вдоль оси z по всему объему обследования. Устройство дополнительно содержит набор шиммирующих катушек 2' (1-го, 2-го, и в соответствующих случаях 3-гопорядка), при этом ток, протекающий через индивидуальные шиммирующие катушки набора 2', может контролироваться с целью минимизации отклонений B0 в пределах объема обследования.
Система для создания магнитного резонанса и управления им прикладывает серию RF импульсов и переключаемые градиенты магнитного поля для опрокидывания или возбуждения ядерно-магнитных спинов, индуцирования магнитного резонанса, перефокусировки магнитного резонанса, управления магнитным резонансом, пространственного или иного кодирования магнитного резонанса, насыщения спинов и т.п. для проведения MR визуализации.
В частности, усилитель 3 градиентных импульсов прикладывает импульсы тока к выбранным градиентным катушкам 4, 5 и 6 для всего тела вдоль x, y и z-осей объема обследования. Цифровой передатчик 7 радиочастот передает RF импульсы или пакеты импульсов через переключатель 8 приема-передачи на RF катушку 9 для тела с целью передачи RF импульсов в объеме обследования. Обычная MR визуализирующая последовательность состоит из пакета сегментов RF импульсов малой продолжительности, которые совместно с любыми приложенными градиентами магнитного поля позволяют избирательно управлять ядерным магнитным резонансом. RF импульсы используются для насыщения, возбуждения резонанса, инвертирования намагниченности, перефокусировки резонанса либо управления резонансом, а также выбора участка тела 10, располагаемого в объеме обследования. MR сигналы также принимаются RF катушкой 9 для тела.
Для генерирования MR изображений ограниченных областей тела 10 посредством параллельной визуализации набор локальных матричных RF катушек 11, 12, 13 располагают смежно с областью, выбранной для визуализации. Матричные катушки 11, 12, 13 могут использоваться для приема MR сигналов, индуцированных передачей RF сигнала катушки для тела. При применении параллельной передачи матричные катушки 11, 12, 13 могут также использоваться для RF передачи, например с целью RF-шиммирования.
Получаемые в результате MR сигналы принимаются RF катушкой 9 для тела и/или матричными RF катушками 11, 12, 13 и демодулируются приемником 14, который предпочтительно включает в себя предварительный усилитель (не показан). Приемник 14 соединен с RF катушками 9, 11, 12 и 13 посредством переключателя 8 прием-передача.
Главный компьютер 15 управляет током, протекающим через шиммирующие катушки 2', а также усилителем 3 градиентных импульсов и передатчиком 7 для генерирования любой из множества MR визуализирующих последовательностей, например, эхо-планарной визуализации (EPI), объемной эхо-визуализации, визуализации с использованием градиентного и спинового эха, визуализации с использованием быстрого спин-эха и т.п. Для выбранной последовательности приемник 14 получает одну или множество MR линий данных в быстрой последовательности вслед за каждым RF импульсом возбуждения. Система 16 получения выполняет аналого-цифровое преобразование принятых сигналов и преобразует каждую MR линию данных в цифровой формат, пригодный для дальнейшей обработки данных. В современных MR устройствах система 16 получения представляет собой отдельный компьютер, адаптированный для получения исходных данных изображения.
И наконец, исходные данные изображения реконструируются в представление изображения с помощью процессора 17 реконструкции изображений, использующего преобразование Фурье или иные соответствующие алгоритмы реконструкции, например SENSE или SMASH. MR изображение может представлять планарный срез тела пациента, набор параллельных планарных срезов, трехмерный объем и т.п. Изображение далее загружается в память для хранения изображений, где оно доступно для преобразования срезов, проекций или других участков представления изображения в соответствующий формат для визуализации, например с помощью видеомонитора 18, обеспечивающего воспринимаемое человеком отображение итогового MR изображения.
На Фиг. 2 показана диаграмма, иллюстрирующая визуализирующую последовательность согласно изобретению. Изображенная визуализирующая последовательность представляет собой последовательность стимулированных эхо-сигналов, подразделяющуюся на подготовительный период 21 и период 22 получения. Два подготовительных RF импульса, имеющих угол α отклонения вектора намагниченности, прикладываются в процессе подготовительного периода 21. Два подготовительных RF импульса разделены временным интервалом TE. Между двумя подготовительными RF импульсами прикладывается дефазирующий градиент GMC2 магнитного поля. В процессе периода 22 получения, который следует по времени за подготовительным периодом 21, генерируется последовательность RF импульсов считывания, имеющих угол β отклонения вектора намагниченности. После каждого импульса считывания осуществляется получение FID-сигнала I1 и стимулированного эхо-сигнала I2 в качестве градиент-восстановленных эхо-сигналов.
Непосредственно после подготовительной последовательности 21 продольная намагниченность определяется следующим образом:

где Mz1 и Mz2 обозначают соответственно «неподготовленную» (т.е. совпадающую по фазе) и «подготовленную» стимулированным эхом (т.е. дефазированную) продольную намагниченность. Согласно изобретению как FID-сигнал I1, сгенерированный из Mz1, так и стимулированный эхо-сигнал I2, сгенерированный из Mz2, получают в различные моменты времени TEI и TEI+ΔΤ соответственно. Задержка ΔΤ между двумя эхо-сигналами I1, I2 определяется соотношением:
ΔΤ=Amc2/Gm,
где Amc2 обозначает градиентно-временную область дефазирующего градиента Gmc2, а Gm обозначает величину градиента считывания магнитного поля. Если пренебречь влиянием T1 и T2, два полученных эхо-сигнала I1 и I2 определяются следующим образом:

где S представляет комплексную константу системы, одинаковую для обоих эхо-сигналов I1 и I2 и определяемую, например, чувствительностями передающей и приемной катушек для заданного вокселя. β - номинальный угол отклонения вектора намагниченности RF импульсов считывания. C описывает дефазировку статического сигнала для заданного вокселя вследствие эффектов восприимчивости и химического сдвига:

где ρ и ω обозначают плотность протонов и нерезонансный сдвиг частоты соответственно. Интеграл описывает суммирование по заданному вокселю. С учетом временного соотношения
TE=2TE1+ΔT
измеренные эхо-сигналы I1 и I2 определяются следующим образом:

Таким образом, дефазировочный член C одинаков для обоих эхо-сигналов, помимо зеркально отраженной фазы. Например, если выбрать TEI=2,3 мс при напряженности основного магнитного поля 3 Тесла, вклады сигналов от спинов воды и вклады сигналов от спинов жира по существу совпадают по фазе для обоих эхо-сигналов I1, I2. Объединив вышеприведенные уравнения, получаем:

Таким образом, неизвестный угол отклонения вектора намагниченности стимулированных эхо-подготовительных RF импульсов может быть получен из соотношения полученных эхо-сигналов следующим образом:

Зеркально отраженная фаза стимулированного эхо-сигнала I2 может быть далее использована для получения B0-фазового отображения:

Кроме того, отображение фазового сдвига, порожденного последовательностью операций передача/прием используемого MR устройства 1, можно определить из измеренных эхо-сигналов I1, I2 согласно следующему выражению:

Следует отметить, что для B1-отображения также может использоваться альтернативная схема синхронизации ΤΕ=ΔΤ, позволяющая получить идентичные дефазировочные члены, т.е. без зеркально отраженной фазы. Однако это приводит к более продолжительному интервалу ΔΤ, а значит, более продолжительному общему времени повторения последовательности. Кроме того, разделение вкладов различных фаз в целях, например, B0-отображения становится невозможным.
Наконец, также может быть использована альтернативная схема синхронизации TE=TEI+ΔΤ, которая полностью сохраняет свойства спинового эха для стимулированного эха. Такая схема синхронизации по-прежнему предусматривает совпадающие по фазе моменты времени появления эхо-сигналов жир-вода для обоих сигналов. Кроме того, стимулированный эхо-сигнал позволяет непосредственно получить фазу приема-передачи, при этом B0-фазовое отображение сгенерировано согласно указанным выше формулам.
На Фиг. 3 показано B1-отображения ног, полученное с помощью способа по изобретению. B1-отображение полностью охватывает бедра. Эксперименты по B1-отображению проводились in vivo на системе MR визуализации с напряженностью магнитного поля 3 Тесла, оборудованной 8 каналами передачи и 8-элементной катушкой 9 передачи/приема для тела. Визуализирующая последовательность, показанная на Фиг. 2, использовалась для B1-отображения и соответствующего RF-шиммирования. Были получены 8 срезов изображения с полем обзора 450×270×15 мм3. Использовалась матрица сканирования 64×38×1 с зазором между срезами 30 мм. Номинальный угол отклонения вектора намагниченности стимулированных эхо-подготовительных RF импульсов составлял до α=60°, номинальный угол отклонения вектора намагниченности RF импульсов считывания составлял до β=20°. Было выбрано время повторения 3,7 мс. Было получено 38 профилей за одно повторение последовательности. Общая продолжительность сканирования составляла до 1,2 с. Выбранная схема синхронизации получения эха (TE=5,6 мс, TEI=2,3 мс, ΔΤ=1 мс) позволила получить совпадающие по фазе сигналы от воды и жира для обоих эхо-сигналов I1, I2. Левое изображение на Фиг. 3 представляет обзорный скан, указывающий положения срезов сканов B1-отображения. Левая и правая колонки на Фиг. 3 показывают B1-отображения, полученные согласно изобретению. В B1-отображениях левой колонки использовали установочные параметры шиммирования со сдвигом по фазе на 90 градусов. Данные отображения показывают обычные артефакты затенения, указывающие на B1-неоднородность. Оптимизированные установочные параметры RF-шиммирования были получены из B1-отображений среза 30. В правой колонке показаны B1-отображения, полученные согласно изобретению при оптимизированных установочных параметрах RF-шиммирования. Артефакты затенения существенно снижены для RF-шимированного возбуждения. Варьирование B1-поля снижено, по меньшей мере, на 50%.
На Фиг. 4 показано схематичное изображение применения способа по изобретению в сочетании с навигаторами для динамического B1-отображение и RF-шиммированием в режиме реального времени при использовании параллельной передачи. Установочные параметры RF-шиммирования определяли из калибровочного сканирования 41 и использовали для RF-шиммирования в режиме реального времени в последующем сканировании 42 для диагностической визуализации. В калибровочном сканировании 41, в котором пациенту позволено свободно дышать, навигаторы NAV и B1-отображающие сканы B1 MAP согласно изобретению применяли для индивидуальных передающих RF-катушек использованного MR устройства. B1-отображения были получены в динамической петеле для нескольких дыхательных циклов. Набор установочных параметров RF-шиммирования RF SHIM, разрешенных по фазе дыхательного цикла, получали с использованием соответствующего алгоритма оптимизации (например, описанного Setsompop и др., MRM 2008, 59, 908-15). Итоговые установочные параметры RF-шиммирования назначали различным состояниям движения, полученным из навигационных сигналов с помощью соответствующей модели. Это может быть справочная таблица, в которой получены рассчитанные установочные параметры RF-шиммирования совместно с соответствующими состояниями движения. Возможны более совершенные модели, откалиброванные на основе сканов B1-отображений. В последующем диагностическом сканировании 42 использовалась навигационная последовательность NAV для управления установочными параметрами RF-шиммирования. На основе состояния движения, полученного из навигационных сигналов в процессе диагностического сканирования 42, выбиралась соответствующая установка RF-шиммирования из набора RF SHIM и использовалась для последующей последовательности IMG получения изображения.
Дополнительный сценарий применения технологии по изобретению показан на Фиг. 5. Данный вариант осуществления может относиться, например, к двухканальной системе параллельной передачи, в которой используются две RF-катушки для генерирования RF-полей. Применительно к брюшной полости, например, выполняется RF-шимированное аксиальное сканирование. Подобно дыхательным движениям, на характеристики RF-шиммирования также оказывают влияние перистальтические движения и движение газов в кишечнике. В этой связи измерения B1-отображений осуществляют практически одновременно посредством технологии по изобретению на этапе B1 MAP для двух каналов передачи перед фактическим абдоминальным сканированием IMG. С этой целью аксиальное мультислайсовое сканирование со стимулированным эхом согласно изобретению может использоваться для получения FID- и стимулированных эхо-сигналов от двух или трех смежных срезов, расположенным очень близко и параллельно друг другу. Активный канал передачи чередуется для соседних срезов. Таким образом, B1-отображения двух каналов передачи определяются практически в идентичных анатомических средах, т.е. без необходимости применения продолжительного интервала времени релаксации. Двухканальное B1-отображение может выполняться, таким образом, за 300-450 мс, за которым следует расчет в режиме реального времени соответствующих коэффициентов шиммирования RF SHIM, которые могут использоваться в последующем визуализирующем сканировании IMG, как показано на Фиг. 5. В случае получения сегментированного изображения может оказаться необходимым повтор процедуры отображения в режиме реального времени B1 MAP перед каждым сегментом сканирования.
На Фиг. 6 схематично показано приложение способа по изобретению для мониторинга SAR. На Фиг. 6 показано тело 10 пациента на виде в разрезе, выполненном через объем обследования MR устройства. Группа 61 локальных RF-катушек гибкой конструкции расположена на поверхности тела 10. Любое относительное изменение электрических параметров, вызванное движением или дыханием (обозначено стрелкой 62), контролируется в режиме реального времени системой 64 с обратной связью, используемой для управления RF-синтезатором 63 в отношении амплитуды и фазы передаваемых RF импульсов, излучаемых посредством каждой из индивидуальных RF-катушек группы 61 передающих RF-катушек. Управление выполняется так, чтобы удовлетворялись пороговые значения безопасности SAR. Передаваемые RF импульсы корректируются, чтобы не допустить появления локальных «горячих точек» SAR. Входные параметры для системы 64 с обратной связью определяются путем оценки SAR в пределах участка тела 10 из B1-отображений, полученных из результатов измерений стимулированного эха согласно вышеописанному способу по изобретению. Вообще взаимодействие между RF-катушками и телом 10 может контролироваться с использованием различных датчиков, которые могут быть встроены в группу 61 передающих RF-катушек. Могут использоваться датчики, измеряющие непосредственно расстояние и/или положение индивидуальных RF-катушек относительно тела 10. Дополнительные датчики могут использоваться для измерения входного полного сопротивления RF-катушек. Кроме того, могут использоваться датчики, предоставляющие информацию о состоянии механической формы (изгибе) группы 61 передающих RF-катушек. Все эти датчики могут использоваться для получения входных параметров системы 64 с обратной связью.
На Фиг. 7 показана диаграмма, иллюстрирующая визуализирующую последовательность согласно другому варианту осуществления изобретения. На диаграмме показана визуализирующая последовательность (внизу) вместе с фазовыми диаграммами, показывающими траектории связи для статических, связанных с восприимчивостью градиентов (сверху) и переключаемых градиентов (в центре). Последовательность RF импульсов считывания состоит из подготовительного периода 21 и периода 22 получения. RF импульс β считывания создает FID-сигнал, стимулированное эхо STE и сопряженное стимулированное эхо STE*, получение которых осуществляется в качестве отдельных градиент-восстановленных эхо-сигналов IFID, ISTE и ISTE*. Порядок получения определяется дефазирующим градиентом Gm2. Синхронизация трех градиентных эхо-сигналов контролируется переключаемыми градиентами Gml, Gm (проиллюстрированными нижней фазовой диаграммой ФGr). Верхняя фазовая диаграмма Фoffr иллюстрирует воздействие статических неоднородностей, а значит, спектральное кодирование сигналов.
Непосредственно после периода 21 подготовки стимулированного эха продольная ядерная намагниченность выражается следующим образом:

где MZ,FID обозначает «неподготовленную» (т.е. совпадающую по фазе) продольную намагниченность, а MZ,STE и MZ,STE* обозначают два вклада «подготовленной» зеркально отраженным стимулированным эхом (т.е. дефазированной) продольной намагниченности. Компоненты поперечной намагниченности (т.е. FID от первого RF импульса α, FID- и спиновое эхо от второго RF импульса α) модулированы мощным градиентным импульсом и далее не рассматриваются. Следовательно, RF импульс β считывания визуализирующей последовательности создает три трансверсальных вклада сигнала:

где S представляет комплексную константу системы, содержащую, например, чувствительности передающих и приемных катушек для заданного вокселя, а β - номинальный угол отклонения вектора намагниченности RF импульса считывания. Помимо этого, C описывает дефазировку статического сигнала для заданного вокселя вследствие эффектов восприимчивости и химического сдвига,

где r и ω обозначают плотность протонов и нерезонансный сдвиг частоты, при этом интеграл описывает суммирование по заданному вокселю. В то время как STE сигнал ISTE осуществляет перефокусировку в качестве стимулированного эха, STE* сигнал ISTE* дополнительно осуществляет дефазировку, а значит, обычно отбрасывается в традиционных экспериментах с использованием стимулированного эха. Однако в визуализирующей последовательности, показанной на Фиг. 7, используются специализированные переключаемые градиенты магнитного поля для получения всех трех вкладов сигналов в качестве отдельных вызванных градиентных эхо-сигналов в заранее выбранные моменты времени появления эхо-сигналов. Соотношение между градиентными областями измерительного градиента Gm, рефазирующего градиента Gm1 и дефазирующего градиента Gm2 стимулированного эха определяется следующими выражениями:
Первое уравнение гарантирует, что градиентное эхо FID перефокусируется в центре второго градиента Gm считывания. Второе уравнение гарантирует, что прямое стимулированное эхо STE и сопряженное стимулированное эхо STE* перефокусируются в центре первого и третьего градиентов Gm считывания соответственно. Порядок получения (STE-FID-STE* или STE*-FID-STE) определяется полярностью дефазирующего градиента Gm2 стимулированного эха. В пределах общей последовательности временные ограничения, полученные, например, из ограничений ширины диапазона получения данных или RF и величины градиента, моментов времени получения градиентных эхо-сигналов (т.е. времени верхней границы градиентного эха) могут независимо выбираться с целью получения требуемого спектрального кодирования для различных эхо-сигналов. Например, схема получения с T2*/T2-компенсацией может быть получена с использованием STE*-FID-STE порядка получения, дополнительно подчиняющегося схеме синхронизации TESTE*=TEFID-TS. После этого и время спектрального кодирования (т.е. время эволюции T2*), и время эволюции T2 идентичны как для STE*-, так и для FID-сигнала, а именно TEFID. Таким образом, влияние T2 и T2* исчезает в B1-отображении, полученном из соотношения STE*- и FID-сигналов. Это позволяет повысить точность способа B1-отображения в веществах, имеющих малое T2, или в областях высоких градиентов восприимчивости. С целью минимизации времени повторения от получения STE сигнала в конце последовательности можно просто отказаться. Это приведет к подходу с двойным эхом, аналогичному вышеописанному варианту осуществления, показанному на Фиг. 2, но в котором вместо этого получают FID-сигнал и сопряженное стимулированное эхо STE*. В качестве альтернативы STE сигнал может быть получен дополнительно во время появления эхо-сигнала TESTE=TEFID+TS, что приводит к эквидистантной схеме выборки для трех градиентных эхо-сигналов. Таким образом, STE и STE* сигналы имеют одинаковое время спектрального кодирования, а именно TEFID, и отличаются только временем эволюции T2, которое для STE составляет TEFID+2TS. Следовательно, MR изображения, реконструированные из STE и STE* сигналов, могут быть добавлены перед дальнейшей оценкой сигнала для улучшения соотношения сигнал-шум итогового B1-отображения в случае довольно длительного T2. В качестве альтернативы в случае сильной T2-релаксации значение T2 можно грубо оценить из соотношения сигналов согласно выражению

в предположении однократного экспоненциального T2-затухания. Кроме того, может быть использовано иное кодирование потока STE* и STE сигналов. В качестве дополнительной альтернативы могут быть выбраны различные времена спектрального кодирования для STE и STE* сигналов. Таким образом, T2* или, что более важно, эффекты химического сдвига могут быть закодированы в двух различных STE и STE* эхо-сигналах. Таким образом, двухточечный подход Диксона с гибким временем появления эхо-сигналов (см. Eggers и др., "Dual-echo Dixon imaging with flexible choice of echo times", MRM 2011, 65, 96-107, а также Berglund и др., "Two-point Dixon method with flexible echo times", MRM 2011, 65, 994-1004) может применяться к MR изображению, реконструированному из STE* и STE сигналов, для разделения сигналов от воды и жира и для создания оценки B0-отображения. По аналогии с традиционным двухточечным подходом по Диксону предпочтительно выбрать примерно совпадающие по фазе/противоположные по фазе времена кодирования для оптимизации устойчивости подхода. Однако в отличие от традиционных последовательностей Диксона изменение полярности градиента не требуется, что позволяет сократить последовательность и снизить нечетные/четные фазовые ошибки, связанные с вихревыми токами. Для определения оценки B0-отображения, что является нелегкой задачей, если она базируется только на двух эхо-сигналах, может добавляться информация FID-сигнала (амплитуда, фаза). Кроме того, в качестве дополнительного усовершенствования, способ может быть объединен с традиционной технологией по Диксону путем переключения полярности градиента после STE*-FID-STE получения данных для получения второго STE-FID-STE* получения данных в другие моменты времени спектрального кодирования. Дополнительная информация, предоставляемая продленной последовательностью, может быть использована для повышения надежности и точности способа.
На диаграмме, показанной на Фиг. 8, сигнал FID спада свободной индукции измеряется дважды в различные моменты времени появления эхо-сигналов. В представленном варианте осуществления это достигается путем продления градиента считывания магнитного поля и переключения его полярности в промежуточный момент времени. Таким образом, B1-отображение согласно изобретению остается по существу незатронутым. Незначительно увеличивается лишь время появления эхо-сигнала, а значит и влияние T2. Разделение вода-жир и B0-отображение могут выполняться на основе двух измеренных амплитуд и фаз сигнала FID, используя технологию Диксона. Существует возможность интегрировать информацию о B0, доступную из технологии стимулированного эха по изобретению, в технологию Диксона для стабилизации разделения вода-жир и оценки B0. В частности, существует возможность выбрать интервал получения эха между двумя измеренными сигналами FID очень коротким и главным образом полагаться на эти измеренные сигналы для решения проблемы потенциального свертывания фаз, в то время как интервал между измеренными стимулированными эхо-сигналами STE и двумя измеренными сигналами FID может поддерживаться длительным для сохранения точности, т.е. для снижения влияния шума. Кроме того, может выполняться объединенное B0 и B1-отображение и разделение вода-жир согласно изобретению. Это позволяет выбирать несовпадающие по фазе и даже несимметричные моменты времени появления эхо-сигналов для сигнала FID спада свободной индукции и стимулированного эхо-сигнала STE. Полученные сигналы могут быть смоделированы следующим образом:
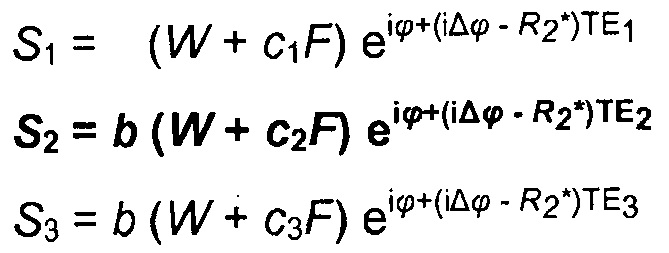
где W и F обозначают вклады от воды и жира, c - амплитудная и фазовая модуляция чистого сигнала жира на соответствующих отрезках временени появления эхо-сигналов, ϕ - начальная фаза, Δϕ - сдвиг фаз, вызванный B0, R2* - эффективная скорость поперечной релаксации (1/T2*), TE - соответствующее время появления эхо-сигнала, а b -весовой коэффициент, отражающий влияние B1. Величины W и F, а также Δϕ или B0, b или B1 могут быть определены на основе этой модели.
Точно так же существует возможность дважды измерить стимулированный эхо-сигнал STE вместо FID-сигнала, либо дважды измерить как стимулированный эхо-сигнал STE, так и FID-сигнал, например, путем дополнительного продления градиентов считывания, так что стимулированный эхо-сигнал STE снова подвергается рефазировке, либо измерить FID-сигнал трижды в различные моменты времени появления эхо-сигналов, чтобы также разрешить фазовые ошибки, индуцированные вихревыми токами, являющиеся следствием использования биполярного градиента считывания.
Реферат
Использование: для магнитно-резонансной (MR) визуализации. Сущность изобретения заключается в том, что участок тела, размещенный в объеме обследования MR-устройства, подвергается воздействию визуализирующей последовательности RF-импульсов и переключаемых градиентов магнитного поля. Визуализирующая последовательность представляет собой последовательность стимулированных эхо-сигналов, включающую в себя i) два подготовительных RF-импульса (α), излучаемых в направлении участка тела в течение подготовительного периода (21), а также ii) RF-импульсы считывания (β), излучаемые в направлении участка тела в течение периода (22) получения, следующего по времени за подготовительным периодом (21). Получение FID-сигналов (I) и стимулированных эхо-сигналов (I) осуществляется в течение периода (22) получения с одинаковым T*-весовым коэффициентом. Из полученных FID (I)- и стимулированных эхо (I)-сигналов получают B-отображение, указывающее пространственное распределение RF-поля подготовительных RF-импульсов в пределах участка тела. Технический результат: обеспечение возможности точного измерения пространственного распределения передаваемого переменного электромагнитного поля (RF-поля, которое также называют Bполем). 3 н. и 23 з.п. ф-лы, 8 ил.
Комментарии