Устройство представления информации касательно транспортного средства - RU2668149C2
Код документа: RU2668149C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству представления информации касательно транспортного средства, которое применяется к транспортному средству с возможностями автономного вождения и выполнено с возможностью представлять информацию относительно состояния движения транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционно известно устройство представления информации, допускающее сообщение водителю информации независимо от изменения позы, возраста и т.п. водителя (патентный документ 1). Патентный документ 1 сообщает водителю информацию посредством изменения ширины рамки для привлечения внимания или регулирования количества стимуляции светом согласно углу зрения водителя.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] ПАТЕНТНЫЙ ДОКУМЕНТ 1. ПУБЛИКАЦИЯ ЗАЯВКИ НА ПАТЕНТ (ЯПОНИЯ) НОМЕР 2008-191778
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Патентный документ 1 постоянно выдает информацию водителю. В ходе автономного вождения, водитель с большой вероятностью уделяет низкий уровень внимания вождению. Чрезмерное представление информации такому водителю может обременять водителя задачей по расширенному мониторингу.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы и нацелено на предоставление устройства представления информации касательно транспортного средства, допускающего представление надлежащей информации пассажиру согласно состоянию пассажира в ходе автономного вождения.
[0006] Устройство представления информации касательно транспортного средства согласно аспекту настоящего изобретения оценивает уровень внимания при вождении водителя и переключает информацию, которая должна представляться водителю, согласно оцененному уровню внимания при вождении водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является блок-схемой, показывающей конфигурацию автономного транспортного средства, к которому применяется устройство представления информации касательно транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 показывает два примера информации помощи при вождении, представленной на дисплее.
Фиг. 3 показывает два примера информации состояния системы, представленной на дисплее.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей обработку представления информации, выполняемую посредством устройства представления информации касательно транспортного средства согласно первому варианту осуществления.
Фиг. 5(a) является графиком, показывающим взаимосвязь между коэффициентом R11 снижения уровня концентрации внимания и диаметром зрачка водителя. Фиг. 5(b) является графиком, показывающим взаимосвязь между коэффициентом R12 снижения уровня концентрации внимания и пульсом водителя. Фиг. 5(c) является графиком, показывающим взаимосвязь между коэффициентом R13 снижения уровня концентрации внимания и частотой зевания.
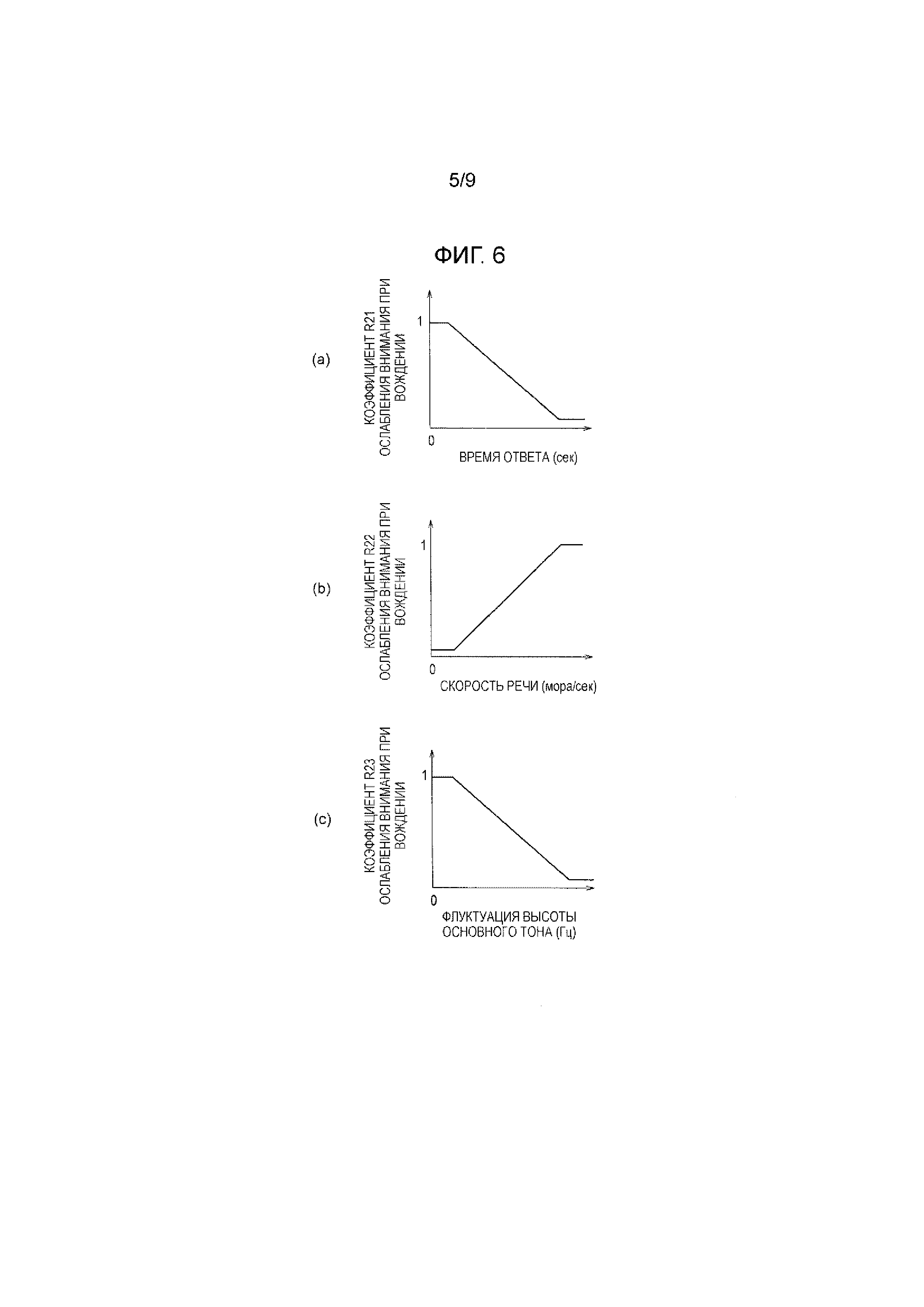
Фиг. 6(a) является графиком, показывающим взаимосвязь между коэффициентом R21 ослабления внимания при вождении и временем ответа. Фиг. 6(b) является графиком, показывающим взаимосвязь между коэффициентом R22 ослабления внимания при вождении и скоростью речи. Фиг. 6(c) является графиком, показывающим взаимосвязь между коэффициентом R23 ослабления внимания при вождении и флуктуацией высоты основного тона.
Фиг. 7(a) является графиком, показывающим взаимосвязь между коэффициентом S11 доверия к системе и частотой обнаружения датчика. Фиг. 7(b) является графиком, показывающим взаимосвязь между коэффициентом S12 доверия к системе и коэффициентом нагрузки на CPU. Фиг. 7(c) является графиком, показывающим взаимосвязь между коэффициентом S13 доверия к системе и точностью результатов вычисленных путей и целевых значений.
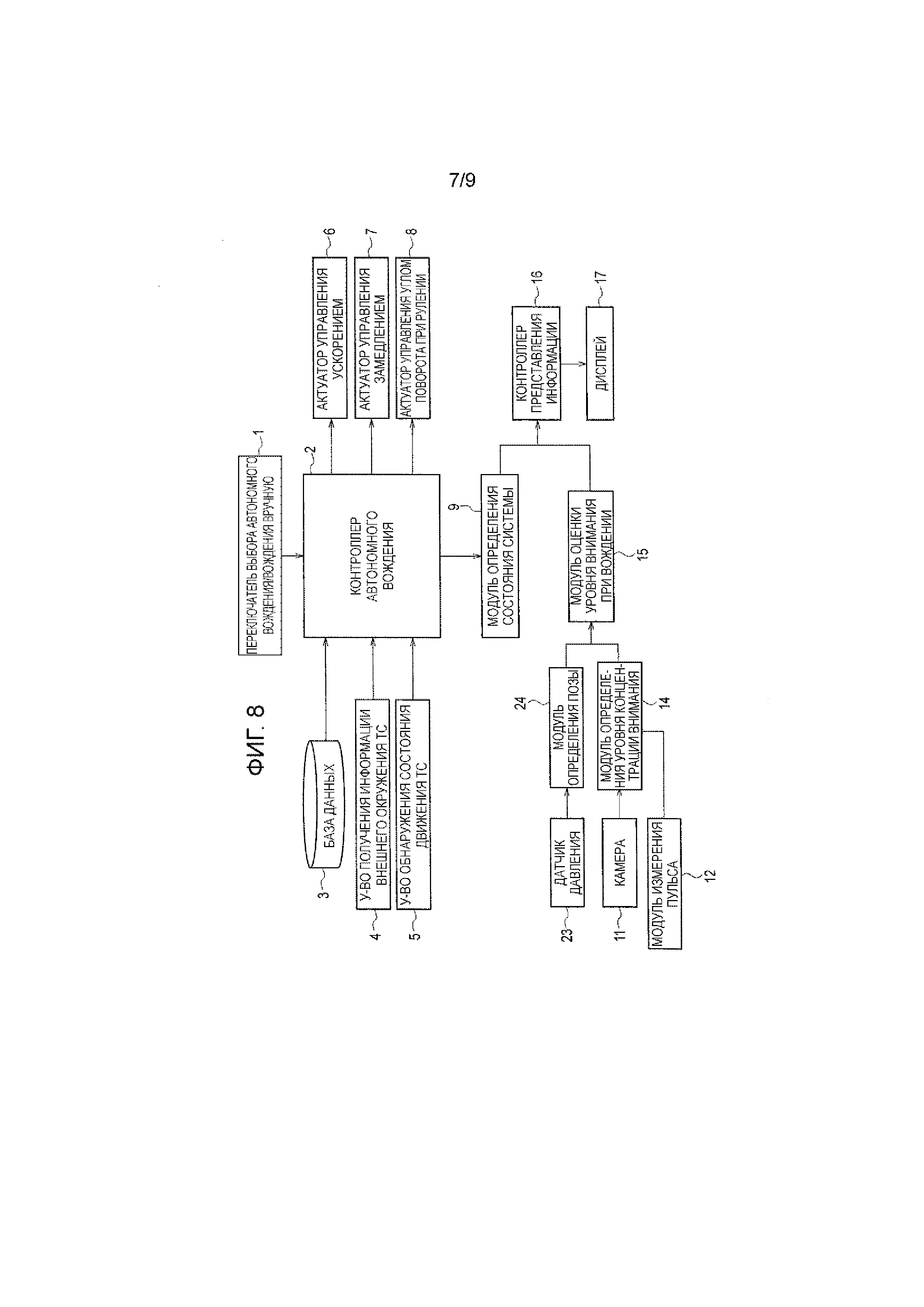
Фиг. 8 является блок-схемой, показывающей конфигурацию автономного транспортного средства, к которому применяется устройство представления информации касательно транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей обработку представления информации, выполняемую посредством устройства представления информации касательно транспортного средства согласно второму варианту осуществления.
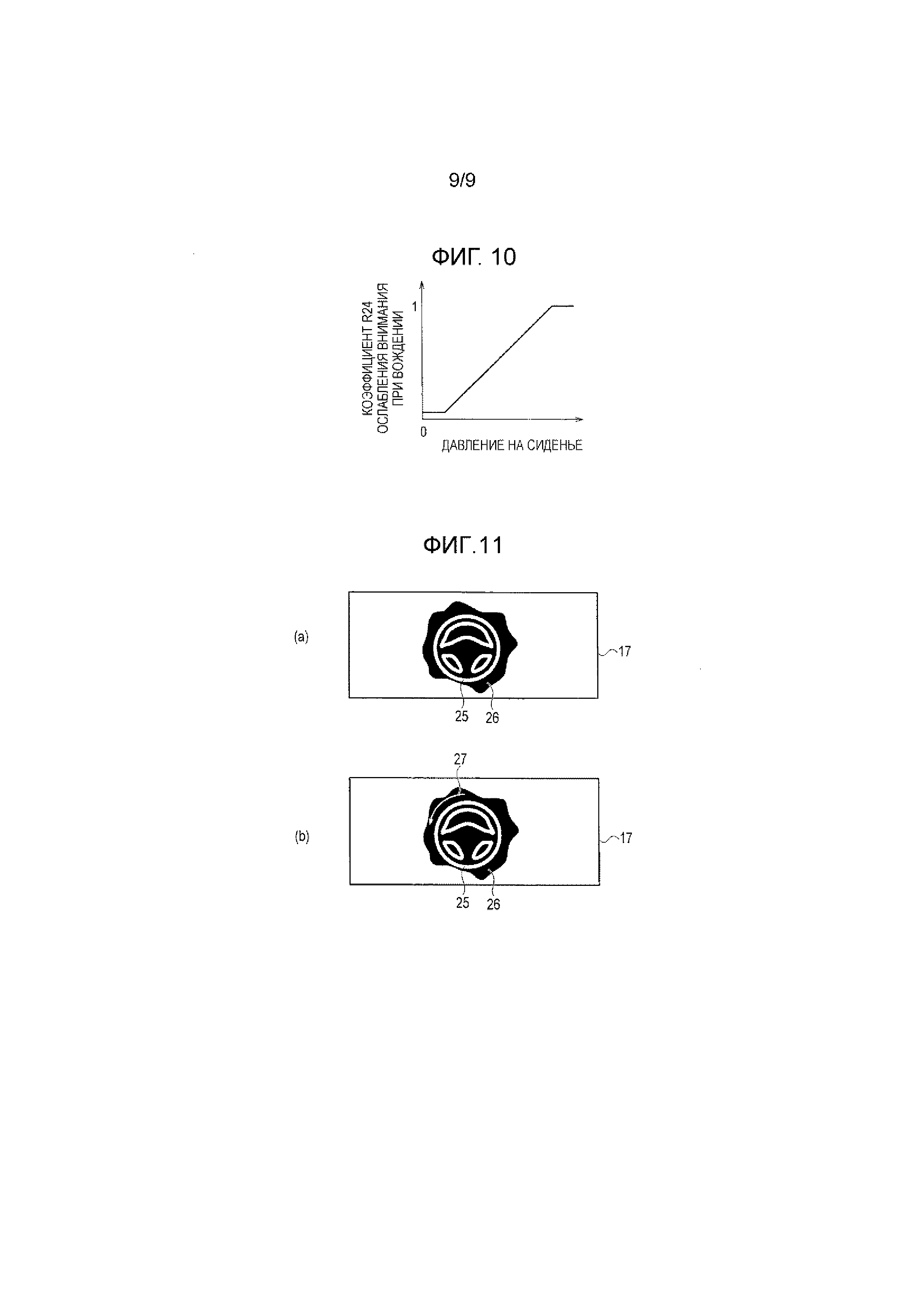
Фиг. 10 является графиком, показывающим взаимосвязь между коэффициентом R24 ослабления внимания при вождении и давлением на сиденье.
Фиг. 11 показывает другие примеры информации помощи при вождении, представленной на дисплее.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Ниже описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0009] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Как показано на фиг. 1, автономное транспортное средство (ниже называемое просто "транспортным средством") главным образом включает в себя переключатель 1 выбора автономного вождения/вождения вручную, контроллер 2 автономного вождения, модуль 9 определения состояния системы, модуль 15 оценки уровня внимания при вождении, контроллер 16 представления информации и дисплей 17.
[0010] Переключатель 1 выбора автономного вождения/вождения вручную нажимается водителем для того, чтобы выбирать и переключаться между автономным вождением и вождением вручную транспортного средства. Например, переключатель 1 выбора автономного вождения/вождения вручную размещен около водительского сиденья транспортного средства.
[0011] Контроллер 2 автономного вождения представляет собой компьютер, неразъемно включающий в себя CPU и модуль записи, такой как RAM, ROM и жесткий диск. Контроллер 2 автономного вождения выполнен с возможностью осуществлять управление автономным вождением транспортного средства на основе состояния движения транспортного средства и информации по внешнему окружению транспортного средства (информации внешнего окружения транспортного средства), когда автономное вождение выбрано водителем с помощью переключателя 1 выбора автономного вождения/вождения вручную. Более конкретно, контроллер 2 автономного вождения получает информацию внешнего окружения транспортного средства посредством использования базы 3 данных, такой как карты и информация трафика, и устройства 4 получения информации внешнего окружения транспортного средства (например, камеры или лазерного датчика). Контроллер 2 автономного вождения обнаруживает состояние движения транспортного средства посредством использования устройства 5 обнаружения состояния движения транспортного средства (например, датчика скорости транспортного средства). Затем контроллер 2 автономного вождения определяет маршрут движения в пункт назначения на основе информации в базе 3 данных и управляет различными актуаторами 6, 7 и 8 управления на основе информации внешнего окружения транспортного средства и состояния движения транспортного средства, так что транспортное средство может двигаться согласно маршруту движения. Транспортное средство в силу этого управляется в режиме автономного вождения посредством контроллера 2 автономного вождения.
[0012] Модуль 9 определения состояния системы определяет состояние системы автономного вождения посредством использования информации, выведенной из контроллера 2 автономного вождения. Состояние системы автономного вождения указывает рабочие состояния устройства 4 получения информации внешнего окружения транспортного средства, такого как камера и различные актуаторы 6, 7 и 8 управления. Когда эти устройства находятся в работоспособном состоянии, модуль 9 определения состояния системы определяет то, что состояние системы является нормальным. При невозможности получать информацию внешнего окружения транспортного средства вследствие повреждения камеры и т.п., модуль 9 определения состояния системы определяет то, что состояние системы является анормальным.
[0013] Когда состояние системы автономного вождения является нормальным, модуль 9 определения состояния системы может классифицировать состояние системы в качестве предпочтительного или непредпочтительного согласно окружающей обстановке при движении. Окружающая обстановка при движении включает в себя погодные и дорожные условия. Состояние системы классифицировано в качестве предпочтительного, когда устройства обеспечивают достаточные рабочие характеристики. Состояние системы классифицировано в качестве непредпочтительного, когда какое-либо из устройств не обеспечивает достаточные рабочие характеристики. Более конкретно, случаи, в которых модуль 9 определения состояния системы определяет то, что состояние системы является непредпочтительным, поскольку какое-либо из устройств не обеспечивает достаточные рабочие характеристики, включают в себя случай, в котором камера может распознавать только свою окрестность вследствие плохой погоды (к примеру, сильного дождя, снега или тумана), случай, в котором лазерный датчик предоставляет только низкую точность считывания вследствие темноты или задней подсветки, случай, в котором камера не может распознавать полосы движения вследствие недостаточных дорожных условий (поскольку, например, сигнальная линия дорожной разметки стерлась, либо дорога представляет собой грунтовую дорогу), и случай, в котором камера не может определять проезжаемый путь вследствие дорожных работ.
[0014] Модуль 13 определения разговоров представляет собой устройство, которое распознает голос, сформированный в салоне транспортного средства. Модуль 13 определения разговоров распознает и анализирует голос водителя, снимаемый посредством микрофона 10. Модуль 13 определения разговоров распознает голос водителя с использованием голосовых данных по водителю, предварительно записанных для того, чтобы отличать голос водителя от голоса других. Разговор включает в себя разговор между водителем и другим пассажиром и разговор между водителем и транспортным средством. Динамик (не показан) устанавливается в салоне транспортного средства. Через этот динамик устройство представления информации касательно транспортного средства может начинать различные типы разговоров (которые могут быть повседневным разговором или вопросником) для водителя. Затем модуль 13 определения разговоров распознает и анализирует речь (голос) водителя в этом разговоре. Даже когда несколько пассажиров находятся в транспортном средстве, устройство представления информации касательно транспортного средства может начинать разговор для водителя через динамик.
[0015] Камера 11 представляет собой устройство, которое захватывает изображения лиц водителя. Камера 11 включает в себя элемент съемки изображений, такой как CCD или CMOS, и размещена около внутреннего зеркала заднего вида или на приборной панели. Угол съемки камеры 11 может изменяться надлежащим образом. Камера 11 может захватывать не только изображения лиц, но также и действие водителя на сиденье (например, действие водителя, приспосабливающего себя на сиденье). Следует отметить, что камера 11 отличается от камеры в устройстве 4 получения информацией внешнего окружения транспортного средства.
[0016] Модуль 12 измерения пульса расположен в части руля и измеряет пульс водителя, когда водитель держит эту часть обеими руками. Альтернативно, модуль 12 измерения пульса может представлять собой бесконтактный датчик, включенный в сиденье.
[0017] Модуль 14 определения уровня концентрации внимания представляет собой устройство, которое определяет уровень концентрации внимания водителя. Модуль 14 определения уровня концентрации внимания определяет уровень концентрации внимания водителя посредством мониторинга движения глаз водителя, к примеру, диаметра зрачка или числа миганий, с использованием изображений лиц водителя, захваченных посредством камеры 11, причем изображения лиц подвергаются различным видам обработки изображений, таким как преобразование в оттенки серого, обнаружение краев и сопоставление с шаблоном. Модуль 14 определения уровня концентрации внимания определяет уровень концентрации внимания водителя также посредством мониторинга пульса водителя, измеряемого посредством модуля 12 измерения пульса.
[0018] Модуль 15 оценки уровня внимания при вождении представляет собой устройство, которое оценивает уровень внимания водителя в отношении вождения. Модуль 15 оценки уровня внимания при вождении оценивает уровень внимания при вождении водителя на основе голоса водителя, проанализированного посредством модуля 13 определения разговоров, и уровня концентрации внимания водителя, определенного посредством модуля 14 определения уровня концентрации внимания.
[0019] Контроллер 16 представления информации переключает информацию, которая должна представляться на дисплее 17, согласно состоянию системы автономного вождения и уровню внимания при вождении водителя. В частности, контроллер 16 представления информации переключается между информацией относительно состояния системы (ниже называемой "информацией состояния системы") и информацией относительно помощи при вождении (ниже называемой "информацией помощи при вождении"). Информация состояния системы указывает то, является состояние системы нормальным или анормальным, и когда состояние системы является нормальным, дополнительно указывает то, является состояние системы предпочтительным или непредпочтительным. Далее приводится подробное описание для получения информации помощи при вождении.
[0020] Дисплей 17 представляет различные фрагменты информации водителю и размещен, например, около водительского сиденья транспортного средства. Дисплей 17 может быть размещен в позиции, в которой информация может представляться не только водителю, но также и другим пассажирам.
[0021] Модуль 9 определения состояния системы, модуль 13 определения разговоров, модуль 14 определения уровня концентрации внимания, модуль 15 оценки уровня внимания при вождении и контроллер 16 представления информации сконфигурированы как компьютер, неразъемно включающий в себя CPU и модуль записи, такой как RAM, ROM и жесткий диск.
[0022] Далее, со ссылкой на фиг. 2, приведены два примера информации помощи при вождении, представленной на дисплее 17 посредством контроллера 16 представления информации. Информация помощи при вождении показывает помехи на проезжаемом пути, направление движения и т.п., чтобы помогать плавному переходу от автономного вождения к вождению вручную. Как показывает фиг. 2(a), изображения 18-20 представлены на дисплее 17. Изображение 18 указывает помехи на проезжаемом пути и направление движения. Заштрихованные прямоугольники указывают области, в которых транспортное средство не может двигаться, а незаштрихованные прямоугольники указывают области, в которых транспортное средство может двигаться. Таким образом, изображение 18 указывает то, что дорога, по которой движется транспортное средство, имеет две полосы движения. Стрелка в изображении 18 указывает то, что транспортное средство поворачивает направо на следующем перекрестке. Изображение 19 указывает то, что транспортное средство поворачивает направо через четыре секунды. Изображение 20 является треугольным изображением, которое указывает состояние системы автономного вождения и изменяет цвет согласно состоянию системы. Цвета изображения 20 не ограничены. Например, изображение 20 переключается на зеленый цвет, когда состояние системы является предпочтительным, и переключается на красный цвет, когда состояние системы является непредпочтительным. Желательно, например, чтобы выбирались цвета, для которых люди могут легко понимать, что они означают, к примеру, красный (опасность), желтый (внимание) и зеленый (нормально). Контроллер 16 представления информации также может изменять цвет изображения 20 градационно согласно значению уровня S1 доверия к системе, которое описывается ниже. Как показано на фиг. 2(b), контроллер 16 представления информации может представлять тахометр, спидометр и топливомер в качестве информации помощи при вождении.
[0023] Далее, со ссылкой на фиг. 3, приведены два примера информации состояния системы автономного вождения, представленной на дисплее 17 посредством контроллера 16 представления информации. Когда состояние системы является предпочтительным, контроллер 16 представления информации представляет изображение 21, в котором метка в форме транспортного средства накладывается на зеленый прямоугольник, как показано на фиг. 3(a). Когда состояние системы является непредпочтительным, контроллер 16 представления информации представляет изображение 22, в котором метка в форме транспортного средства накладывается на красный прямоугольник, как показано на фиг. 3(b). В силу представления одного из таких простых изображений, которые отличаются только цветом, водитель видит при одном беглом взгляде то, является состояние системы предпочтительным или непредпочтительным. Когда состояние системы является непредпочтительным, изображение 22 может мигать, вращаться или обводиться рамкой, чтобы привлекать внимание водителя. Когда состояние системы является анормальным, контроллер 16 представления информации ничего не отображает на дисплее 17 или представляет изображение 22 с большим размером, чем тогда, когда состояние системы является непредпочтительным. Посредством такого выполнения подчеркнутого представления, когда состояние системы является анормальным, контроллер 16 представления информации может сильно привлекать внимание водителя.
[0024] Далее, со ссылкой на блок-схему последовательности операций способа на фиг. 4, приводится описание обработки представления информации, выполняемой посредством устройства представления информации касательно транспортного средства. Эта блок-схема последовательности операций способа начинается, когда автономное вождение выбирается с помощью переключателя.
[0025] Во-первых, на этапе S101, модуль 9 определения состояния системы определяет то, является или нет состояние системы автономного вождения нормальным. Обработка переходит к этапу S103, когда состояние системы является нормальным, и переходит к этапу S102, когда состояние системы не является нормальным.
[0026] На этапе S102, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является анормальным, и в силу этого завершает обработку.
[0027] Когда обработка переходит к этапу S103, модуль 14 определения уровня концентрации внимания вычисляет величину R1 снижения уровня концентрации внимания (%). Величина R1 снижения уровня концентрации внимания является индексом того, насколько снижается уровень концентрации внимания водителя. Модуль 14 определения уровня концентрации внимания определяет то, что водитель имеет более низкий уровень концентрации внимания, когда величина R1 снижения уровня концентрации внимания показывает более высокое число. Величина R1 снижения уровня концентрации внимания выражается следующим образом с использованием коэффициентов R11, R12 и R13 снижения уровня концентрации внимания:
R1=R11×R12×R13×100.
Коэффициенты R11, R12 и R13 снижения уровня концентрации внимания описываются со ссылкой на фиг. 5. Аналогично величине R1 снижения уровня концентрации внимания, коэффициенты R11, R12 и R13 снижения уровня концентрации внимания являются индексами того, насколько снижается уровень концентрации внимания водителя.
[0028] Фиг. 5(a) является графиком, показывающим взаимосвязь между коэффициентом R11 снижения уровня концентрации внимания и диаметром зрачка водителя. Коэффициент R11 снижения уровня концентрации внимания равен 1, когда диаметр зрачка составляет до 2 мм, и снижается по мере того, как диаметр зрачка увеличивается с 2 мм.
[0029] Фиг. 5(b) является графиком, показывающим взаимосвязь между коэффициентом R12 снижения уровня концентрации внимания и пульсом водителя. Коэффициент R12 снижения уровня концентрации внимания равен 1, когда пульс составляет до 50 биений в минуту, и снижается по мере того, как пульс увеличивается с 50 биений в минуту.
[0030] Фиг. 5(c) является графиком, показывающим взаимосвязь между коэффициентом R13 снижения уровня концентрации внимания и частотой зевания водителя. Коэффициент R13 снижения уровня концентрации внимания приближается к 1 по мере того, как увеличивается число зевков за предварительно определенный период времени.
[0031] Модуль 14 определения уровня концентрации внимания в силу этого вычисляет величину R1 снижения уровня концентрации внимания с использованием коэффициентов R11-R13 снижения уровня концентрации внимания. Хотя величина R1 снижения уровня концентрации внимания вычисляется с использованием коэффициентов R11-R13 снижения уровня концентрации внимания в настоящем варианте осуществления, величина R1 снижения уровня концентрации внимания может вычисляться с использованием только одного или двух из коэффициентов R11-R13 снижения уровня концентрации внимания. Индексы уровня концентрации внимания водителя не ограничены индексами, приведенными выше. Например, продолжительность мигания водителя, частота протирания глаз водителя или период времени, в который глазные яблоки являются неподвижными, может использоваться для того, чтобы вычислять величину R1 снижения уровня концентрации внимания.
[0032] Затем, на этапе S104, модуль 13 определения разговоров вычисляет уровень R2 ослабления внимания при вождении (%). Уровень R2 ослабления внимания при вождении является индексом того, насколько водитель не уделяет внимание вождению. Модуль 13 определения разговоров определяет то, что водитель уделяет меньшее внимание вождению, когда уровень R2 ослабления внимания при вождении показывает более высокое число. Уровень R2 ослабления внимания при вождении выражается следующим образом с использованием коэффициентов R21, R22 и R23 ослабления внимания при вождении:
R2=R21×R22×R23×100.
Коэффициенты R21-R23 ослабления внимания при вождении описываются со ссылкой на фиг. 6. Аналогично уровню R2 ослабления внимания при вождении, коэффициенты R21-R23 ослабления внимания при вождении являются индексами того, насколько водитель не уделяет внимание вождению.
[0033] Фиг. 6(a) является графиком, показывающим взаимосвязь между коэффициентом R21 ослабления внимания при вождении и временем ответа. Время ответа является продолжительностью, которая истекает до того, как водитель отвечает при разговоре с другим пассажиром или транспортным средством. Чем короче время ответа, тем больше коэффициент R21 ослабления внимания при вождении приближается к 1, поскольку меньшее время ответа указывает то, что водитель более сконцентрирован на разговоре.
[0034] Фиг. 6(b) является графиком, показывающим взаимосвязь между коэффициентом R22 ослабления внимания при вождении и скоростью речи. Скорость речи является скоростью, с которой говорит водитель. Чем выше скорость речи, тем больше коэффициент R22 ослабления внимания при вождении приближается к 1, поскольку более высокая скорость речи указывает то, что водитель более сконцентрирован на разговоре.
[0035] Фиг. 6(c) является графиком, показывающим взаимосвязь между коэффициентом R23 ослабления внимания при вождении и флуктуацией высоты основного тона. Флуктуация высоты основного тона является частотой голоса водителя. Чем меньше флуктуация высоты основного тона, тем больше коэффициент R23 ослабления внимания при вождении приближается к 1, поскольку меньшая флуктуация высоты основного тона указывает то, что водитель более сконцентрирован на разговоре.
[0036] Как описано выше, модуль 13 определения разговоров вычисляет уровень R2 ослабления внимания при вождении с использованием коэффициента R21-R23 ослабления внимания при вождении. Хотя уровень R2 ослабления внимания при вождении вычисляется с использованием коэффициентов R21-R23 ослабления внимания при вождении в настоящем варианте осуществления, уровень R2 ослабления внимания при вождении может вычисляться с использованием только одного или двух из коэффициентов R21-R23 ослабления внимания при вождении.
[0037] Затем, на этапе S105, модуль 15 оценки уровня внимания при вождении вычисляет уровень R внимания при вождении (%). Уровень R внимания при вождении является индексом того, насколько водитель уделяет внимание вождению. Модуль 15 оценки уровня внимания при вождении определяет то, что водитель уделяет большее внимание вождению, когда уровень R внимания при вождении показывает более высокое число. Уровень R внимания при вождении выражается следующим образом с использованием величины R1 снижения уровня концентрации внимания и уровня R2 ослабления внимания при вождении:
R=(100-R1)×(100-R2)/100.
Уровень R внимания при вождении также может вычисляться с использованием только одного из величины R1 снижения уровня концентрации внимания и уровня R2 ослабления внимания при вождении. В этом случае, нуль вставляется для значения неиспользуемого индекса.
[0038] Затем, на этапе S106, контроллер 16 представления информации определяет то, выше или нет уровень R внимания при вождении Rlimit (предварительно определенного значения). Обработка переходит к этапу S107, когда уровень R внимания при вождении выше Rlimit, и переходит к этапу S108, когда уровень R внимания при вождении равен или меньше Rlimit.
[0039] На этапе S107, контроллер 16 представления информации представляет информацию помощи при вождении на дисплее 17 и завершает обработку.
[0040] С другой стороны, на этапе S108, модуль 9 определения состояния системы вычисляет уровень S1 доверия к системе (%). Уровень S1 доверия к системе является индексом того, насколько предпочтительным является состояние системы автономного вождения. Модуль 9 определения состояния системы определяет то, что состояние системы является более предпочтительным, когда уровень S1 доверия к системе показывает большее значение. Уровень S1 доверия к системе выражается следующим образом с использованием коэффициентов S11, S12 и S13 доверия к системе:
S1=S11×S12×S13×100.
Коэффициенты S11-S13 доверия к системе описываются со ссылкой на фиг. 7. Аналогично уровню S1 доверия к системе, коэффициенты S11-S13 доверия к системе являются индексами того, насколько предпочтительным или непредпочтительным является состояние системы.
[0041] Фиг. 7(a) является графиком, показывающим взаимосвязь между коэффициентом S11 доверия к системе и частотой обнаружения датчика. Частота обнаружения датчика является значением, полученным посредством деления характеристики, например, лазерного датчика при текущих условиях движения на максимальную характеристику лазерного датчика. Более конкретно, в случае лазерного датчика, допускающего обнаружение помехи вплоть до 200 метров впереди, лазерный датчик имеет частоту обнаружения датчика в 0,5, если лазерный датчик может обнаруживать только помеху в 100 метрах впереди вследствие плохого состояния окружающей среды, к примеру, дождя или тумана. Чем выше частота обнаружения датчика, тем больше коэффициент S11 доверия к системе приближается к 1, поскольку более высокая частота обнаружения датчика указывает то, что состояние системы является более предпочтительным.
[0042] Фиг. 7(b) является графиком, указывающим взаимосвязь между коэффициентом S12 доверия к системе и коэффициентом нагрузки на CPU. Коэффициент нагрузки на CPU является коэффициентом нагрузки CPU для управления автономным вождением при текущих условиях движения. Чем ниже коэффициент нагрузки на CPU, тем больше коэффициент S12 доверия к системе приближается к 1, поскольку более низкий коэффициент нагрузки на CPU указывает то, что состояние системы является более предпочтительным.
[0043] Фиг. 7(c) является графиком, показывающим взаимосвязь между коэффициентом S13 доверия к системе и точностью результатов вычисленных путей и целевых значений. Точность результатов вычисленных путей и целевых значений является индексом, численно указывающим, движется или нет транспортное средство с поддержкой автономного вождения по заданному маршруту движения. Более высокое значение точности указывает то, что транспортное средство с поддержкой автономного вождения движется по заданному маршруту движения, а более низкое значение точности указывает то, что транспортное средство с поддержкой автономного вождения движется по маршруту, отличающемуся от заданного маршрута движения. Например, точность результатов вычисленных путей и целевых значений показывает низкое значение, когда система автономного вождения не может распознавать заданный маршрут движения вследствие стершихся разделительных полос или дорожных работ и управляет транспортным средством по другому маршруту. Таким образом, меньшее значение точности указывает то, что состояние системы автономного вождения является более непредпочтительным. Другими словами, чем выше значение точности, тем больше коэффициент S13 доверия к системе приближается к 1, поскольку большее значение указывает то, что состояние системы является более предпочтительным.
[0044] Как описано выше, модуль 9 определения состояния системы вычисляет уровень S1 доверия к системе с использованием коэффициентов S11-S13 доверия к системе. Хотя уровень S1 доверия к системе вычисляется с использованием коэффициентов S11-S13 доверия к системе в настоящем варианте осуществления, уровень S1 доверия к системе может вычисляться с использованием только одного или двух из коэффициентов S11-S13 доверия к системе.
[0045] Затем, на этапе S109, контроллер 16 представления информации определяет то, выше или нет уровень S1 доверия к системе Slimit (предварительно определенного значения). Обработка переходит к этапу S111, когда уровень S1 доверия к системе выше Slimit, и переходит к этапу S110, когда уровень S1 доверия к системе равен или меньше Slimit.
[0046] На этапе S110, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является непредпочтительным, и завершает обработку.
[0047] С другой стороны, на этапе S111, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является предпочтительным, и завершает обработку.
[0048] Как описано выше, устройство представления информации касательно транспортного средства настоящей заявки оценивает уровень R внимания при вождении водителя и переключает информацию, которая должна представляться на дисплее 17, согласно оцененному уровню R внимания при вождении водителя. Устройство представления информации касательно транспортного средства может предоставлять водителю надлежащую информацию посредством переключения информации, которая должна представляться на дисплее 17, между информацией, которая придает водителю уверенность в отношении автономного вождения, и информацией, которая привлекает внимание водителя.
[0049] Устройство представления информации касательно транспортного средства настоящего варианта осуществления определяет состояние системы автономного вождения и представляет состояние системы на дисплее 17, когда уровень R внимания при вождении водителя равен или меньше Rlimit. Водитель может быть обеспокоен, если информация помощи при вождении представляется водителю, когда водитель уделяет низкий уровень внимания вождению. По этой причине, когда водитель уделяет низкий уровень внимания вождению, устройство представления информации касательно транспортного средства настоящего варианта осуществления исключает беспокойство водителя посредством представления состояния системы водителю с использованием простого изображения. Помимо этого, водитель может отслеживать автономное вождение с меньшим усилием, поскольку водитель видит состояние системы при одном беглом взгляде.
[0050] Устройство представления информации касательно транспортного средства настоящего варианта осуществления вычисляет уровень S1 доверия к системе, указывающий то, является состояние системы автономного вождения предпочтительным или непредпочтительным, и представляет, на дисплее 17, информацию, указывающую то, что состояние системы является непредпочтительным, когда уровень S1 доверия к системе равен или меньше Slimit. В качестве этой информации, устройство представления информации касательно транспортного средства представляет красное изображение 22, которое легко бросается в глаза водителю и за счет этого может привлекать внимание водителя, который уделяет низкий уровень внимания вождению. Это поднимает уровень внимания при вождении водителя, предотвращая ситуацию, в которой водитель нервничает, когда режим приведения в движение внезапно переключается с автономного вождения на вождение вручную.
[0051] Когда уровень S1 доверия к системе выше Slimit, устройство представления информации касательно транспортного средства настоящего варианта осуществления представляет, на дисплее 17, информацию, указывающую то, что состояние системы является предпочтительным. В качестве этой информации, устройство представления информации касательно транспортного средства представляет зеленое изображение 21. Водитель в силу этого может видеть при одном беглом взгляде то, что состояние системы является предпочтительным, испытывая ощущение уверенности в отношении автономного вождения.
[0052] Устройство представления информации касательно транспортного средства настоящего варианта осуществления обнаруживает состояние водителя и за счет этого оценивает уровень R внимания при вождении. Устройство представления информации касательно транспортного средства в силу этого может точно оценивать уровень R внимания при вождении водителя.
[0053] Устройство представления информации касательно транспортного средства настоящего варианта осуществления обнаруживает голос водителя из разговора, поддерживаемого в салоне транспортного средства, и оценивает уровень R внимания при вождении водителя на основе этого обнаруженного голоса. Устройство представления информации касательно транспортного средства в силу этого может точно оценивать уровень R внимания при вождении водителя.
[0054] Устройство представления информации касательно транспортного средства настоящего варианта осуществления обнаруживает, по меньшей мере, одно из времени ответа, скорости речи и флуктуации высоты основного тона водителя при разговоре, поддерживаемом в салоне транспортного средства. Устройство представления информации касательно транспортного средства в силу этого может точно оценивать уровень R внимания при вождении водителя.
[0055] Помимо этого, устройство представления информации касательно транспортного средства настоящего варианта осуществления оценивает уровень R внимания при вождении водителя с использованием изображения лица и пульса водителя. Устройство представления информации касательно транспортного средства в силу этого может точно оценивать уровень R внимания при вождении водителя.
[0056] Из изображений лиц водителя, устройство представления информации касательно транспортного средства настоящего варианта осуществления обнаруживает, по меньшей мере, одно из диаметра зрачка, частоты зевания, продолжительности мигания и частоты протирания глаз. Устройство представления информации касательно транспортного средства в силу этого может точно оценивать уровень R внимания при вождении водителя.
[0057] Устройство представления информации касательно транспортного средства настоящего варианта осуществления представляет, на дисплее 17, информацию помощи при вождении, когда уровень R внимания при вождении выше Rlimit. Посредством проверки информации помощи при вождении, которая содержит такую информацию, как помехи на проезжаемом пути и направление движения, водитель может плавно переходить от автономного вождения к вождению вручную. Другими словами, водитель может принимать на себя вождение без спешки, испытывая ощущение уверенности в отношении автономного вождения.
[0058] При определении того, что состояние системы является анормальным, устройство представления информации касательно транспортного средства настоящего варианта осуществления подчеркнуто представляет информацию, указывающую анормальность состояния системы, на дисплее 17. Таким образом, устройство представления информации касательно транспортного средства может сильно привлекать внимание водителя.
[0059] В настоящем варианте осуществления, информация состояния системы содержит меньший объем информации, чем информация помощи при вождении, как показано на фиг. 2 и 3. Устройство представления информации касательно транспортного средства в настоящем варианте осуществления представляет такую информацию состояния системы, когда водитель уделяет низкий уровень внимания вождению. Таким образом, устройство представления информации касательно транспортного средства представляет меньший объем информации водителю, который уделяет низкий уровень внимания вождению. Посредством уменьшения объема информации, которая должна представляться, устройство представления информации касательно транспортного средства может предоставлять надлежащую информацию водителю, уделяющего низкий уровень внимания вождению.
[0060] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее описывается второй вариант осуществления настоящего изобретения. Второй вариант осуществления отличается от первого варианта осуществления тем, что поза используется вместо голоса для того, чтобы оценивать уровень внимания при вождении. Части, идентичные частям в первом варианте осуществления, обозначаются посредством ссылок с номерами, идентичных ссылкам с номерами, используемыми в первом варианте осуществления, и не описываются подробно снова.
[0061] Как показано на фиг. 8, устройство представления информации касательно транспортного средства второго варианта осуществления отличается от устройства представления информации касательно транспортного средства первого варианта осуществления включением датчика 23 давления и модуля 24 определения позы вместо микрофона 10 и модуля 13 определения разговоров.
[0062] Датчик 23 давления является чувствительным к давлению датчиком, который обнаруживает позу пассажира и встраивается в спинку сиденья.
[0063] Модуль 24 определения позы представляет собой устройство, которое определяет позу пассажира на основе давления, приложенного к спинке сиденья, которое обнаруживается посредством датчика 23 давления. Модуль 24 определения позы сконфигурирован как компьютер, неразъемно включающий в себя CPU и носитель записи, такой как RAM, ROM и жесткий диск. В настоящем варианте осуществления, датчик 23 давления, камера 11 и модуль 12 измерения пульса размещены в салоне транспортного средства, с тем чтобы иметь возможность получать не только данные по водителю, но также и данные по другим пассажирам.
[0064] Далее, со ссылкой на блок-схему последовательности операций способа на фиг. 9, приводится описание обработки представления информации, выполняемой посредством устройства представления информации касательно транспортного средства. Эта блок-схема последовательности операций способа начинается, когда автономное вождение выбирается с помощью переключателя.
[0065] Во-первых, на этапе S301, модуль 9 определения состояния системы определяет то, является или нет состояние системы автономного вождения нормальным. Обработка переходит к этапу S303, когда состояние системы является нормальным, и переходит к этапу S302, когда состояние системы не является нормальным.
[0066] На этапе S302, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является анормальным, и в силу этого завершает обработку.
[0067] Когда обработка переходит к этапу S303, модуль 14 определения уровня концентрации внимания вычисляет величину R1 снижения уровня концентрации внимания.
[0068] Затем, на этапе S304, модуль 24 определения позы вычисляет уровень R2' ослабления внимания при вождении (%). Уровень R2' ослабления внимания при вождении является индексом того, насколько пассажир не уделяет внимание вождению. Модуль 13 определения разговоров определяет то, что пассажир уделяет меньшее внимание вождению, когда уровень R2' ослабления внимания при вождении показывает более высокое число. Уровень R2' ослабления внимания при вождении выражается следующим образом с использованием коэффициента R24 ослабления внимания при вождении:
R2'=R24×100.
Коэффициент R24 ослабления внимания при вождении описывается со ссылкой на фиг. 10. Аналогично уровню R2' ослабления внимания при вождении, коэффициент R24 ослабления внимания при вождении является индексом того, насколько пассажир не уделяет внимание вождению.
[0069] Фиг. 10 является графиком, показывающим взаимосвязь между коэффициентом R24 ослабления внимания при вождении и давлением на сиденье. Давление на сиденье является давлением, приложенным к спинке сиденья. Когда пассажир откидывает спинку относительно подушки сиденья посредством регулирования угла спинки сиденья, давление на сиденье увеличивается, и коэффициент R24 ослабления внимания при вождении приближается к 1. Другими словами, чем более расслабленную позу пассажир принимает посредством наклона спинки сиденья, тем больше коэффициент R24 ослабления внимания при вождении приближается к 1. Уровень R2' ослабления внимания при вождении альтернативно может вычисляться с использованием вывода из датчика наклона, предоставленного в сиденье, чтобы считывать наклон.
[0070] Затем, на этапе S305, модуль 15 оценки уровня внимания при вождении вычисляет уровень R' внимания при вождении (%). Уровень R' внимания при вождении является индексом того, насколько пассажир уделяет внимание вождению. Модуль 15 оценки уровня внимания при вождении определяет то, что пассажир уделяет большее внимание вождению, когда уровень R' внимания при вождении показывает большее значение. Уровень R' внимания при вождении выражается следующим образом с использованием величины R1 снижения уровня концентрации внимания и уровня R2' ослабления внимания при вождении:
R'=(100-R1)×(100-R2')/100.
Уровень R' внимания при вождении также может вычисляться с использованием только одного из величины R1 снижения уровня концентрации внимания и уровня R2' ослабления внимания при вождении. В этом случае, нуль вставляется для значения неиспользуемого индекса.
[0071] Затем, на этапе S306, контроллер 16 представления информации определяет то, выше или нет уровень R' внимания при вождении Rlimit (предварительно определенного значения). Обработка переходит к этапу S307, когда уровень R' внимания при вождении выше Rlimit, и переходит к этапу S308, когда уровень R' внимания при вождении равен или меньше Rlimit.
[0072] На этапе S307, контроллер 16 представления информации представляет информацию помощи при вождении на дисплее 17 и завершает обработку.
[0073] С другой стороны, на этапе S308, модуль 9 определения состояния системы вычисляет уровень S1 доверия к системе.
[0074] Затем, на этапе S309, контроллер 16 представления информации определяет то, выше или нет уровень S1 доверия к системе Slimit (предварительно определенного значения). Обработка переходит к этапу S311, когда уровень S1 доверия к системе выше Slimit, и переходит к этапу S310, когда уровень S1 доверия к системе равен или меньше Slimit.
[0075] На этапе S310, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является непредпочтительным, и завершает обработку.
[0076] С другой стороны, на этапе S311, контроллер 16 представления информации представляет, на дисплее 17, информацию, указывающую то, что состояние системы автономного вождения является предпочтительным, и завершает обработку.
[0077] Как описано выше, устройство представления информации касательно транспортного средства настоящего варианта осуществления обнаруживает позу пассажира и оценивает уровень R' внимания при вождении пассажира на основе обнаруженной позы пассажира. Затем устройство представления информации касательно транспортного средства переключает информацию, которая должна представляться на дисплее 17, согласно оцененному уровню R' внимания при вождении пассажира. Устройство представления информации касательно транспортного средства может предоставлять пассажиру надлежащую информацию посредством переключения информации, которая должна представляться на дисплее 17, между информацией, которая придает уверенность в отношении автономного вождения, и информацией, которая привлекает внимание водителя. Устройство представления информации касательно транспортного средства отслеживает не только водителя, но также и пассажира, отличного от водителя, чтобы иметь возможность оценивать уровень R' внимания при вождении пассажиров, включающих в себя водителя. Устройство представления информации касательно транспортного средства в силу этого может переключать информацию согласно уровню R' внимания при вождении пассажиров, включающих в себя водителя, так что пассажир, отличный от водителя, также может получать ощущение уверенности в отношении автономного вождения.
[0078] Вышеописанные варианты осуществления предоставляются для того, чтобы представлять примеры варианта применения настоящего изобретения, и не имеют намерение ограничивать объем настоящего изобретения тем, что раскрыто в качестве вариантов осуществления. Таким образом, объем настоящего изобретения не ограничен конкретными техническими вопросами, раскрытыми в вышеописанных вариантах осуществления, и охватывает различные модификации, изменения, альтернативные технологии и т.п., которые могут легко выводиться из раскрытия сущности в данном документе.
[0079] Например, когда должен выполняться переход от автономного вождения к вождению вручную, как показано на фиг. 11(a), устройство представления информации касательно транспортного средства настоящего изобретения может представлять, на дисплее 17, изображение 25 в форме руля и фоновое изображение 26, выполняющее неравномерное движение позади изображения 25. В силу этого, устройство представления информации касательно транспортного средства может привлекать внимание водителя с указанием водителю принимать управление на себя и выполнять вождение вручную. Посредством проверки изображения 25, водитель может знать при одном беглом взгляде то, что теперь он должен управлять рулем. Изображение 25 может иметь форму педали вместо руля. Цвет изображения 26 не ограничен и может изменяться согласно степени необходимости переходить к вождению вручную. Например, изображение 26 может быть зеленым, когда степень необходимости переходить к вождению вручную является низкой, и может быть красным, когда степень необходимости переходить к вождению вручную является высокой. Помимо этого, как показано на фиг. 11(b), устройство представления информации касательно транспортного средства может представлять, в качестве изображения 27, направление, в котором водитель должен поворачивать руль, чтобы переходить к вождению вручную. Это обеспечивает возможность водителю выполнять плавный переход к вождению вручную.
СПИСОК НОМЕРОВ ССЫЛОК
[0080] 9 - модуль определения состояния системы
10 - микрофон (модуль обнаружения голоса)
11 - камера (модуль захвата изображений)
12 - модуль измерения пульса
13 - модуль определения разговора (модуль обнаружения состояния пассажиров)
14 - модуль определения уровня концентрации внимания (модуль обнаружения состояния пассажиров)
15 - модуль оценки уровня внимания при вождении
16 - контроллер представления информации
23 - датчик давления (модуль обнаружения позы)
24 - модуль определения позы (модуль обнаружения состояния пассажиров)
Реферат
Изобретение относится к системам управления транспортным средством. Устройство представления информации касательно транспортного средства для использования в автономном транспортном средстве переключает управление вождением между управлением автономным вождением и управлением вождением вручную. Устройство представления информации содержит модуль оценки уровня внимания при вождении и контроллер представления информации. Контроллер представления информации выполнен с возможностью переключать информацию изображения согласно уровню внимания при вождении водителя, оцененному посредством модуля оценки уровня внимания при вождении. Контроллер представления информации переключается между информацией состояния системы автономного вождения и информацией помощи при вождении для перехода от автономного вождения к ручному вождению. Достигается повышение безопасности управления транспортным средством. 12 з.п. ф-лы, 20 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления для транспортного средства и способ помощи водителю транспортного средства при парковке
Комментарии