Устройство, система и способ определения межзрачкового расстояния - RU2722303C2
Код документа: RU2722303C2
Чертежи











Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[001] В настоящей заявке заявлено преимущество и приоритет по предварительной заявке на патент США №62/159,490, под названием "УСТРОЙСТВО, СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕЖЗРАЧКОВОГО РАССТОЯНИЯ", поданной 11 мая 2015, полное раскрытие которой посредством ссылки полностью включены в настоящий документ.
ОБЛАСТЬ ТЕХНИКИ
[002] Варианты реализации настоящего изобретения, описанные в настоящей заявке, в целом относятся к определению межзрачкового расстояния.
УРОВЕНЬ ТЕХНИКИ
[003] Межзрачковое расстояние (PD) между зрачками пользователя может быть измерено, например, в дополнение к рефракционному рецепту для очков, например, монофокальных или мультифокальных очков.
[004] Оптические центры очков могут быть выполнены с возможностью совпадения с линией взгляда пользователя, например, для обеспечения ясного и удобного зрительного восприятия.
[005] Для мультифокальных (MF) очков, которые могут иметь узкую зону обзора на большом расстоянии, может потребоваться более высокая точность измерения межзрачкового расстояния PD, чем для монофокальных очков.
[006] Межзрачковое расстояние PD может быть определено как два неравных расстояния от центра оправы для очков, например, центра носовой части пользователя, например, если симметрия в межзрачковом расстоянии PD не всегда имеет место, как, например, в случаях косоглазия.
[007] Несоответствие межзрачкового расстояния может привести, например, к двойному зрению (диплопии), головным болям и/или другим нежелательным явлениям.
[008] Степень возможной ошибки в определении межзрачкового расстояния может зависеть от оптической силы линзы, например, Rx очков. Например, для линзы с небольшой оптической силой большие несоответствия межзрачкового расстояния, возможно, не вызовут ухудшение зрения пользователя.
[009] Погрешность допуска межзрачкового расстояния может быть не симметричной. Согласно одному варианту реализации, если измеренное межзрачковое расстояние PD пользователя меньше, чем фактическое межзрачковое расстояние PD пользователя, например, в случае отрицательной ошибки, пользователь может быть в состоянии компенсировать отрицательную ошибку, например, небольшой аккомодацией глаз, которая может вести к сведению глаз (конвергенции), которое может уменьшить фактическое межзрачковое расстояние PD пользователя. Согласно еще одному варианту реализации измеренное межзрачковое расстояние PD пользователя, которое больше, чем фактическое межзрачковое расстояние PD пользователя, например, в случае положительной ошибки, может привести к незначительному двойному зрению и/или другим неудобствам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Для простоты и ясности иллюстрации элементы, показанные на чертежах, не обязательно выполнены в масштабе. Например, размеры некоторых из элементов могут быть увеличены относительно других элементов для ясности их представления. Кроме того, позиционные номера могут повторяться на чертежах для указания соответствующих или аналогичных элементов. Чертежи перечислены ниже.
[0011] ФИГ. 1 схематически показывает функциональную схему системы в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0012] ФИГ. 2 схематически показывает линзу и датчик камеры в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0013] ФИГ. 3 схематически показывает представляющую диаграмму захвата изображения объекта в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0014] ФИГ. 4 схематически показывает представляющую диаграмму захвата изображения наклонного объекта в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
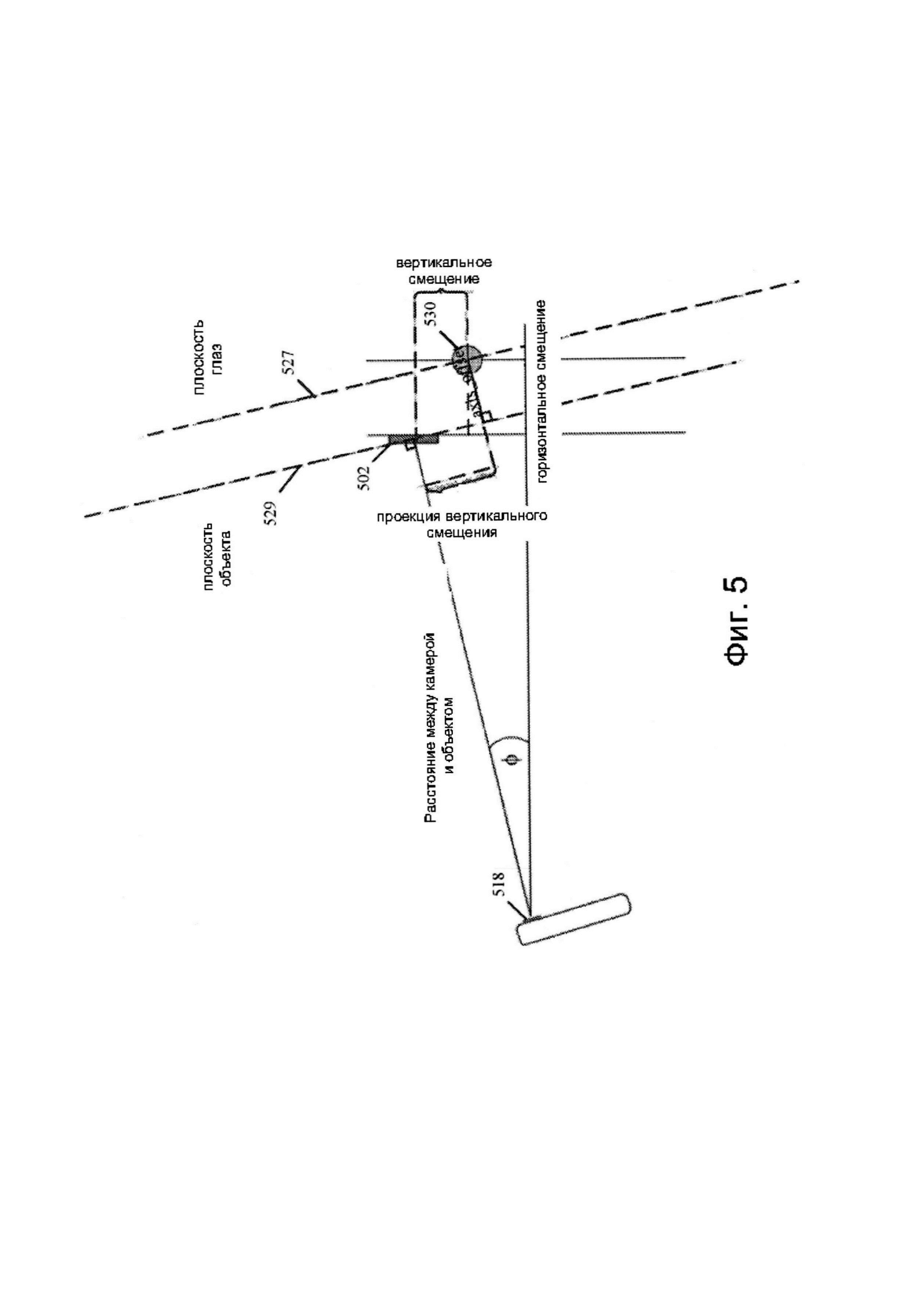
[0015] ФИГ. 5 схематически показывает представляющую диаграмму захвата объекта наклонной камерой в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0016] ФИГ. 6 схематически показывает горизонтальный разрез правого глаза пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0017] ФИГ. 7 схематически показывает межзрачковое расстояние между двумя глазами пользователя, смотрящего на камеру, в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0018] ФИГ. 8A-8F схематически показывают гистограммы, соответствующие множеству моделей по методу Монте Карло в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0019] ФИГ. 9 схематически показывает блок-схему способа определения межзрачкового расстояния (PD) пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0020] ФИГ. 10 схематически показывает блок-схему способа определения межзрачкового расстояния PD пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[0021] ФИГ. 11 схематически показывает программный продукт в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0022] В приведенном ниже подробном описании сформулированы различные конкретные детали для обеспечения полного понимания некоторых вариантов реализации. Однако специалисту в данной области техники понятно, что некоторые варианты реализации могут быть осуществлены без этих конкретных подробностей. Согласно еще одним вариантам реализации известные способы, процедуры, компоненты, блоки и/или схемы не описаны подробно, чтобы не затруднять понимание.
[0023] Некоторые части следующего подробного описания представлены в виде алгоритмов и условных обозначений операций над битами данных или двоичными цифровыми сигналами в машинной памяти. Эти алгоритмические описания и представления могут быть технологиями, используемыми специалистами в области обработки данных для передачи сути их работы другим специалистам.
[0024] Алгоритм в данном случае и в целом рассматривается как самосогласованная последовательность действий или операций, ведущих к необходимому результату. Он включает в себя физические манипуляции с физическими величинами. Обычно, но не обязательно, эти величины принимают форму электрических или магнитных сигналов, сформированных с возможностью их сохранения, передачи, объединения, сравнения и управления ими иным способом. Иногда преимущественно по причинам общего использования считается удобным именовать эти сигналы как биты, значения, элементы, символы, знаки, термины, номера или тому подобное. Однако, разумеется, все эти и подобные термины должны быть связаны с соответствующими физическими величинами и просто являются удобными маркировками, применимыми к этим величинам.
[0025] Используемые в описаниях, приведенных в настоящей заявке, термины, такие как, например, "обработка", "расчет с применением ЭВМ", "вычисление", "определение", "установление", "анализ", "проверка" или тому подобное, могут относиться к операции (операциям) и/или процессу (процессам), выполняемым с использованием компьютера, вычислительной платформы, вычислительной системы или другого электронного вычислительного устройства, которое манипулирует данными и/или преобразует данные, представленные как физические (например, электронные) величины в реестрах и/или запоминающих устройствах компьютера, в другие данные, схожим образом представленные как физические величины в реестрах и/или запоминающих устройствах компьютера или другой среде для хранения информации, в которой могут быть сохранены инструкции для выполнения операций и/или процессов.
[0026] Термины "множество" и "одно множество", используемые в настоящей заявке, включают в себя, например, "любое количество" или "два или более". Например, термин "множество пунктов" включает в себя два или более пунктов.
[0027] Ссылки на "один вариант реализации", "любой вариант реализации", "приведенный в качестве примера вариант реализации", "различные варианты реализации" и т.п. указывают, что вариант или варианты реализации, описанные таким образом, могут включать в себя конкретный признак, структуру или характеристику, но не каждый вариант реализации обязательно включает в себя этот конкретный признак, структуру или характеристику. Кроме того, повторное использование фразы "согласно одному варианту реализации" не обязательно относится к одному и тому же варианту реализации, несмотря на то, что это также может иметь место.
[0028] Встречающееся в настоящей заявке, если не указано иное, использование порядковых прилагательных, таких как "первый", "второй", "третий" и т.п., для описания общего объекта просто указывает, что имеет место ссылка на различные экземпляры подобных объектов, и не следует подразумевать, что объекты, описанные таким образом, должны быть расположены в данной последовательности, независимо от того, является ли эта последовательность временной, пространственной, классификационной или определена любым другим способом.
[0029] Некоторые варианты реализации, например, могут иметь форму полностью аппаратного варианта реализации, полностью программного варианта реализации или варианта реализации, содержащего элементы как аппаратных средств, так и программного обеспечения. Некоторые варианты реализации могут быть осуществлены в форме программного обеспечения, которое помимо прочего содержит встроенное программное обеспечение, постоянно установленное программное обеспечение, микрокод или тому подобное.
[0030] Кроме того, некоторые варианты реализации могут иметь форму компьютерного программного продукта, извлекаемого из используемого компьютером или компьютерочитаемого носителя, обеспечивающего программный код для использования компьютером или в соединении с компьютером или любой системой для исполнения инструкций. Например, используемый компьютером или компьютерочитаемый носитель может быть любым устройством или может содержать любое устройство, которое может содержать, сохранять, сообщать, распространять или передавать программу для использования системой, аппаратом или устройством для исполнения инструкций или в соединении с системой, аппаратом или устройством для исполнения инструкций.
[0031] Согласно некоторым приведенным в качестве примера вариантам реализации носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или аппаратом, или устройством) или носителем для распространения. Некоторые приведенные в качестве примера образцы компьютерочитаемого носителя могут содержать полупроводниковое или твердотельное запоминающее устройство, магнитную ленту, съемную компьютерную дискету, запоминающее устройство с произвольным доступом (ОЗУ), постоянное запоминающее устройство (ПЗУ), флэш-память, жесткий магнитный диск и оптический диск. Некоторые приведенные в качестве примера варианты оптических дисков содержат запоминающее устройство на основе только считываемого компакт-диска (CD-ROM), считываемого и записываемого компакт-диска (CD-R/W) и DVD.
[0032] Согласно некоторым приведенным в качестве примера вариантам реализации система обработки данных, подходящая для хранения и/или исполнения кода программы, может содержать по меньшей мере один процессор, связанный непосредственно или опосредованно с элементами запоминающего устройства, например, посредством системной шины. Элементы запоминающего устройства могут включать в себя, например, локальное запоминающее устройство, используемое во время фактического выполнения программного кода, запоминающее устройство для массивов данных и кэш-память, которая обеспечивает временное хранение по меньшей мере некоторого программного кода для уменьшения количества извлечений кода из запоминающего устройства для массивов данных во время его исполнения.
[0033] Согласно некоторым приведенным в качестве примера вариантам реализации устройство ввода-вывода (включающее в себя помимо прочего клавиатуру, отображающие устройства, указывающие устройства и т.п.) может быть связано с системой либо непосредственно, либо посредством промежуточных контроллеров ввода/вывода. Согласно некоторым приведенным в качестве примера вариантам реализации сетевые адаптеры могут быть связаны с системой для обеспечения возможности связи этой системы обработки данных с другими системами обработки данных или дистанционными принтерами или накопительными устройствами, например, посредством частных сетей или сетей общего пользования. Согласно некоторым приведенным в качестве примера вариантам реализации модемы, кабельные модемы и коммуникационные платы сети Ethernet могут служить в качестве примеров типов сетевых адаптеров. Также могут быть использованы другие подходящие компоненты.
[0034] Некоторые варианты реализации могут содержать один или более каналов проводной или беспроводной связи, могут использовать один или более компонентов беспроводной связи, могут использовать один или более способов или протоколов беспроводной связи или тому подобное. В некоторых вариантах реализации могут быть использованы проводная связь и/или беспроводная связь.
[0035] Некоторые варианты реализации могут использоваться вместе с различными устройствами и системами, например, мобильным телефоном, смартфоном, мобильным компьютером, ноутбуком, портативным компьютером, планшетным компьютером, переносным компьютером, переносным устройством, персональным цифровым помощником (PDA), переносным устройством PDA, мобильным или переносным устройством, немобильным или непереносным устройством, сотовым телефоном, беспроводным телефоном, устройством, имеющим одну или более внутренних антенн и/или наружных антенн, беспроводным переносным устройством или тому подобным.
[0036] На ФИГ. 1 схематично показана блок-схема системы 100 согласно некоторым приведенным в качестве примера вариантам реализации.
[0037] Как показано на ФИГ. 1, система 100 согласно некоторым приведенным в качестве примера вариантам реализации может содержать устройство 102.
[0038] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может быть осуществлено с использованием подходящих аппаратных компонентов и/или программных компонентов, например, процессоров, контроллеров, запоминающих устройств, устройств для хранения данных, устройств ввода, устройств вывода, устройств связи, операционных систем, приложений или тому подобного.
[0039] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать, например, вычислительное устройство, мобильный телефон, смартфон, сотовый телефон, портативный компьютер, мобильный компьютер, ноутбук, портативный компьютер, планшетный компьютер, переносной компьютер, переносное устройство, устройство PDA, переносное устройство PDA, устройство беспроводной связи, устройство PDA, которое содержит устройство беспроводной связи, или тому подобное.
[0040] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать, например, один или более процессоров 191, устройств 192 ввода, устройств 193 вывода, запоминающих устройств 194 и/или устройств 195 для хранения данных. Устройство 102 в качестве варианта может содержать другие подходящие аппаратные компоненты и/или программные компоненты. Согласно некоторым приведенным в качестве примера вариантам реализации некоторые или все компоненты одного или более устройств 102 могут быть размещены в общем корпусе или блоке и могут быть соединены или функционально связаны с использованием одного или более каналов проводной или беспроводной связи. Согласно еще одним вариантам реализации компоненты одного или более устройств 102 могут быть распределены среди множества устройств или отдельных устройств.
[0041] Согласно некоторым приведенным в качестве примера вариантам реализации процессор 191 может содержать, например, центральный процессор (ЦП), цифровой сигнальный процессор (ЦСП), одно или более процессорных ядер, одноядерный процессор, двухядерный процессор, многоядерный процессор, микропроцессор, хост-процессор, контроллер, множество процессоров или контроллеров, чип, микрочип, одну или более схем, электронные схемы, логическое устройство, интегральную схему (ИС), специализированную интегральную схему (ASIC) или любой другой подходящий многоцелевой или специализированный процессор или контроллер. Процессор 191 может исполнять инструкции, например, операционной системы (ОС) устройства 102 и/или одного или более подходящих приложений.
[0042] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 192 ввода может содержать, например, клавиатуру, клавишную панель, манипулятор типа "мышь", сенсорный экран, сенсорную панель, шаровой манипулятор управления курсором, стилус, микрофон или другое подходящее указывающее устройство или устройство ввода данных. Устройство 193 вывода может содержать, например, монитор, экран, сенсорный экран, индикаторную панель, отображающее устройство на основе светоизлучающего диода (светодиода), отображающее устройство на основе жидкокристаллического дисплея (ЖК дисплей), плазменное отображающее устройство, один или более звуковых громкоговорителей или наушников, или другие подходящие устройства вывода.
[0043] Согласно некоторым приведенным в качестве примера вариантам реализации запоминающее устройство 194 содержит, например, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), динамическое ОЗУ (динамическое запоминающее устройство с произвольной выборкой (ДЗУПВ)), синхронное динамическое ОЗУ (синхронное ДОЗУ), флэш-память, энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство, кэш-память, буферное запоминающее устройство, кратковременное запоминающее устройство, долговременное запоминающее устройство или другие подходящие запоминающие устройства. Устройство 195 для хранения данных может содержать, например, накопитель на жестком диске, накопитель на гибких магнитных дисках, накопитель на лазерных дисках (CD), накопитель на компакт-дисках, накопитель высокой емкости на цифровых видеодисках (DVD) или другие подходящие съемные или несъемные устройства для хранения данных. В запоминающем устройстве 194 и/или устройстве 195 для хранения данных, например, могут храниться данные, обработанные устройством 102.
[0044] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может быть выполнено с возможностью обмена данными с одним или более других устройств посредством беспроводной и/или проводной сети 103.
[0045] Согласно некоторым приведенным в качестве примера вариантам реализации сеть 103 может содержать проводную сеть, локальную вычислительную сеть (ЛВС), беспроводную локальную вычислительную сеть (БЛВС), радиосеть, сеть сотовой связи, беспроводную сеть, использующую протокол WiFi, беспроводную сеть, работающую в диапазоне инфракрасных волн, беспроводную сеть, работающую по протоколу Bluetooth, и тому подобное.
[0046] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может обеспечивать возможность взаимодействия одного или более пользователей с одним или более процессов, приложений и/или блоков устройства 102, например, как описано в настоящей заявке.
[0047] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может быть выполнено с возможностью выполнения и/или исполнения одной или более операций, модулей, процессов, процедур и/или тому подобного.
[0048] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может быть выполнено с возможностью определения межзрачкового расстояния (PD) пользователя устройства 102, например, как описано ниже.
[0049] Согласно некоторым приведенным в качестве примера вариантам реализации межзрачковое расстояние может включать в себя ближнее межзрачковое расстояние или дальнее межзрачковое расстояние.
[0050] Согласно некоторым приведенным в качестве примера вариантам реализации система 100 может содержать по меньшей мере одно средство, модуль, контроллер и/или приложение 160, выполненные с возможностью определения межзрачкового расстояния (PD) пользователя устройства 102, например, как описано ниже.
[0051] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может содержать программное обеспечение, программный модуль, приложение, программу, подпрограмму, инструкции, систему команд, вычислительный код, слова, значения, символы и тому подобное или может быть осуществлено в форме вышеперечисленного.
[0052] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может содержать локальное приложение, которое исполняется устройством 102. Например, в запоминающем устройстве 194 и/или устройстве 195 для хранения данных могут храниться инструкции, обеспечивающие возможность исполнения приложения 160, и/или процессор 191 может быть выполнен с возможностью исполнения инструкций, обеспечивающих работу приложения 160, например, как описано ниже.
[0053] Согласно еще одним вариантам реализации приложение 160 может содержать удаленное приложение, которое может быть исполнено любой подходящей вычислительной системой, например, сервером 170.
[0054] Согласно некоторым приведенным в качестве примера вариантам реализации сервер 170 может содержать по меньшей мере удаленный сервер, доступный посредством сети Интернет сервер, облачный сервер и/или любой другой сервер.
[0055] Согласно некоторым приведенным в качестве примера вариантам реализации сервер 170 может содержать подходящее запоминающее устройство и/или устройство 174 для хранения данных, в котором хранятся инструкции, обеспечивающие работу приложения 160, и подходящий процессор 171 для исполнения этих инструкций, например, как описано ниже.
[0056] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может включать в себя сочетание удаленного приложения и локального приложения.
[0057] Согласно одному приведенному в качестве примера варианту реализации приложение 160 может быть загружено и/или принято пользователем устройства 102 из другой вычислительной системы, например, сервера 170, так что приложение 160 может быть исполнено локально пользователями устройства 102. Например, инструкции могут быть приняты и сохранены, например, временно в запоминающем устройстве или любой подходящей кратковременной или буферной памяти устройства 102, например, до момента их исполнения процессором 191 устройства 102.
[0058] Согласно еще одному варианту реализации приложение 160 может включать в себя внешний интерфейс, исполняемый локально устройством 102, и внутренний интерфейс, исполняемый сервером 170. Например, один или более первых этапов определения межзрачкового расстояния пользователя могут быть выполнены локально, например, устройством 102, и/или один или более вторых этапов определения межзрачкового расстояния могут быть выполнены удаленным способом, например, сервером 170, например, как описано ниже.
[0059] Согласно другим вариантам реализации приложение 160 может включать в себя любое другое подходящее вычислительное устройство и/или схему.
[0060] Согласно некоторым приведенным в качестве примера вариантам реализации система 100 может содержать интерфейс 110 для обеспечения взаимодействия между пользователем устройства 102 и одним или более элементов системы 100, например, приложением 160.
[0061] Согласно некоторым приведенным в качестве примера вариантам реализации интерфейс 110 может быть осуществлен с использованием любых подходящих аппаратных компонентов и/или программных компонентов, например, процессоров, контроллеров, запоминающих устройств, устройств для хранения данных, устройств ввода, устройств вывода, устройств связи, операционных систем и/или приложений.
[0062] Согласно некоторым вариантам реализации интерфейс 110 может быть осуществлен как часть любого подходящего модуля, системы, устройства или компонента системы 100.
[0063] Согласно еще одним вариантам реализации интерфейс 110 может быть осуществлен как отдельный элемент системы 100.
[0064] Согласно некоторым приведенным в качестве примера вариантам реализации интерфейс 110 может быть осуществлен как часть устройства 102. Например, интерфейс 110 может быть связан с устройством 102 и/или включен в устройство 102 как его часть.
[0065] Согласно одному варианту реализации интерфейс 110 может быть осуществлен, например, как микропрограммное средство и/или как часть любого подходящего приложения устройства 102. Например, интерфейс 110 может быть осуществлен как часть приложения 160 и/или как часть ОС устройства 102.
[0066] Согласно некоторым приведенным в качестве примера вариантам реализации интерфейс 160 может быть осуществлен как часть сервера 170. Например, интерфейс 110 может быть связан с устройством 170 и/или включен в устройство 170 как его часть.
[0067] Согласно одному варианту реализации интерфейс 110 может содержать доступное посредством сети Интернет приложение, вебсайт, вебстраницу, плагин, элемент управления типа ActiveX, компонент богатого информационного наполнения (например, компонент типа Flash или Shockwave) или тому подобное, или может быть частью вышеперечисленного.
[0068] Согласно некоторым приведенным в качестве примера вариантам реализации интерфейс 110 может быть связан, например, с шлюзом (GW) 112 и/или интерфейсом 114 прикладного программирования (API) и/или может содержать шлюз (GW) 112 и/или интерфейс 114 прикладного программирования (API), например, для передачи информации и/или обмена данными между элементами системы 100 и/или одним или более других элементов, например, внутренних или внешних элементов, частей, пользователей, приложений и/или систем.
[0069] Согласно некоторым вариантам реализации интерфейс 110 может содержать любой подходящий графический пользовательский интерфейс (ГПИ) 116 и/или любой другой подходящий интерфейс.
[0070] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя на основании захваченного изображения пользователя, например, как описано ниже.
[0071] Согласно некоторым приведенным в качестве примера вариантам реализации захваченное изображение может быть захвачено пользователем и может включать в себя глаза пользователя, например, как описано ниже.
[0072] Согласно одному варианту реализации извлечение результатов точного измерения межзрачкового расстояния PD из двухмерного (2D) захваченного изображения может включать в себя измерение, оценку и/или анализ одного или более параметров для определения трехмерной (3D) среды, например, для определения межзрачкового расстояния PD. Например, трехмерная среда может отражать камеру, расположенную на расстоянии лица пользователя, и местоположение каждого зрачка пользователя, в данный момент смотрящего на камеру, которая может быть смещена от центра зрачка, например, смещена на расстояние до 1 мм. Местоположение зрачка может совпадать с линией взгляда пользователя, например, со зрительной осью.
[0073] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать устройство для захвата изображения, например, камеру 118 или любое другое устройство, выполненное с возможностью захвата изображения.
[0074] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать источник 122 света, выполненный с возможностью освещения пользователя, например, когда захватывается изображение.
[0075] Согласно некоторым приведенным в качестве примера вариантам реализации источник 122 света может включать в себя фотовспышку, свет светодиода или любой другой источник света.
[0076] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью приема захваченного изображения пользователя, например, от камеры 118.
[0077] Согласно некоторым приведенным в качестве примера вариантам реализации захваченное изображение может включать в себя первое и второе отражения света от источника 122 света.
[0078] Согласно некоторым приведенным в качестве примера вариантам реализации первое отражение может включать в себя отражение света от первого зрачка пользователя, например, первый образ Пуркинье от первого зрачка, и второе отражение может включать в себя отражение света от второго зрачка пользователя, например, первый образ Пуркинье от второго зрачка.
[0079] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании местоположения первого и второго отражений в захваченном изображении и оценочного расстояния между устройством 102 и зрачками пользователя, например, при захвате изображения.
[0080] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании количества пикселов между первым и вторым отражениями и отношения пиксел/мм между этими количествами пикселов, например, как описано ниже.
[0081] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании одного или более атрибутов камеры 118, например, как описано ниже.
[0082] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании параметра радиуса глаза и расстояния между камерой 118 и плоскостью зрачков пользователя, например, как описано ниже.
[0083] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании ориентационной информации относительно ориентации устройства 102, например, если устройство 102 наклонено, например, как описано ниже.
[0084] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может принять захваченное изображение, включающее в себя первое и второе отражения от первого и второго зрачков пользователя.
[0085] Согласно одному варианту реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния PD локально, например, если приложение 160 локально реализовано устройством 102. Согласно данному варианту реализации камера 118 может быть выполнена с возможностью захвата изображения, и приложение 160 может быть выполнено с возможностью приема захваченного изображения, например, от камеры 118, для определения оценочного расстояния между устройством 102 и зрачками пользователя и определения межзрачкового расстояния пользователя, например, как описано ниже.
[0086] Согласно еще одному варианту реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния удаленным способом, например, если приложение 160 реализовано сервером 170, или если внутренний интерфейс приложения 160 реализован сервером 170, например, в то время как внешний интерфейс приложения 160 реализован устройством 102. Согласно данному варианту реализации камера 118 может быть выполнена с возможностью захвата изображения; внешний интерфейс приложения 160 может быть выполнен с возможностью приема захваченного изображения и определения оценочного расстояния между устройством 102 и зрачками пользователя; и сервер 170 и/или внутренний интерфейс приложения 160 могут быть выполнены с возможностью определения межзрачкового расстояния пользователя, например, на основании информации, принятой от внешнего интерфейса приложения 160.
[0087] Согласно одному варианту реализации устройство 102 и/или внешний интерфейс приложения 160 могут быть выполнены с возможностью передачи захваченного изображения и оценочного расстояния серверу 170, например, посредством сети 103; и/или сервер 170 и/или внутренний интерфейс приложения 160 могут быть выполнены с возможностью приема захваченного изображения и/или оценочного расстояния и определения межзрачкового расстояния пользователя, например, на основании захваченного изображения и оценочного расстояния, принятого от устройства 102.
[0088] Согласно некоторым приведенным в качестве примера вариантам реализации захваченное изображение может включать в себя объект на лице пользователя ("эталонный объект").
[0089] Согласно одному варианту реализации межзрачковое расстояние PD может быть извлечено из одиночного изображения человека, смотрящего на вспышку камеры 118, например, во время захвата камерой 118 изображения, и человек удерживает объект, имеющий известный размер, вплотную к элементу своего лица.
[0090] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании одного или более размеров объекта на лице пользователя, например, как описано ниже.
[0091] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании информации об ускорении, указывающей ускорение устройства 102, например, как описано ниже.
[0092] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании объекта на лице пользователя и одного или более атрибутов камеры 118, например, как описано ниже.
[0093] Согласно некоторым приведенным в качестве примера вариантам реализации один или более атрибутов камеры 118 могут включать в себя эффективное фокусное расстояние (EFL) линзы камеры 118, горизонтальное поле обзора (FOV) датчика камеры 118, вертикальное поле обзора датчика камеры 118, разрешающую способность датчика, расстояние ("шаг датчика") между двумя смежными пикселами датчика и/или любые другие дополнительные или альтернативные атрибуты камеры 118.
[0094] На ФИГ. 2 схематично показаны линза 210 и датчик 220 камеры в соответствии с некоторыми приведенными в качестве примера вариантами реализации. Например, камера 118 (на Фиг. 1) может содержать линзу 210 и датчик 220.
[0095] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 2, линза 210 может иметь эффективное фокусное расстояние (EFL) 222, которое может быть задано и/или калибровано, например, устройством 102 (на Фиг. 1), расположенным на расстоянии, равном эффективному фокусному расстоянию (EFL) линзы от датчика 220.
[0096] Согласно некоторым приведенным в качестве примера вариантам реализации горизонтальный угол обзора, обозначенный как αh, может быть определен на основании горизонтального размера датчика 220 и эффективного фокусного расстояния (EFL) 222 линзы 210.
[0097] Согласно некоторым приведенным в качестве примера вариантам реализации вертикальный угол обзора может быть определен, например, на основании вертикального размера датчика 220.
[0098] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 2, горизонтальный шаг 224 датчика, обозначенный как pitchh, может быть задан как расстояние между центрами каждых двух смежных пикселов.
[0099] Согласно некоторым приведенным в качестве примера вариантам реализации шаг 224 датчика может быть определен, например, на основании горизонтальной длины датчика и общего количества горизонтальных пикселов датчика.
[00100] Согласно некоторым приведенным в качестве примера вариантам реализации шаг 224 датчика может быть определен, например, на основании эффективного фокусного расстояния (EFL) 222, горизонтального угла обзора αh и/или вертикального угла обзора, например, следующим образом:

[00101] Как показано на ФИГ. 1, согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании одного или более атрибутов камеры 118, например, горизонтального угла обзора αh, эффективного фокусного расстояния (EFL) 222 (на Фиг. 2) и/или шага 224 датчика (на Фиг. 2), например, как описано ниже.
[00102] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании одного или более атрибутов камеры 118 и одного или более размеров эталонного объекта, например, как описано ниже.
[00103] Согласно некоторым приведенным в качестве примера вариантам реализации эталонный объект может содержать объект, имеющий один или более известных размеров, например, который может быть измерен и/или задан. Например, эталонный объект может содержать кредитную карту, банкноту и/или тому подобное.
[00104] Согласно некоторым приведенным в качестве примера вариантам реализации эталонный объект может содержать лицевой объект или элемент, имеющий один или более известных размеров, например, которые могут быть измерены и/или заданы. Например, эталонный объект содержать радужную оболочку глаза, параметр радиуса глаза и/или тому подобное.
[00105] Согласно некоторым приведенным в качестве примера вариантам реализации камера 118 может быть выполнена с возможностью захвата изображения, содержащего эталонный объект.
[00106] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и эталонным объектом, например, на основании отображенных размеров объекта в захваченном изображении, реальных размеров объекта и атрибутов камеры, например, как описано ниже.
[00107] На ФИГ. 3 схематично показанный представляющая диаграмма 300 захвата изображения объекта 302 в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[00108] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 3, изображение 312 объекта 302 может быть захвачено через линзу 310 камеры. Например, камера 118 (на Фиг. 1) может содержать линзу 310.
[00109] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 3, объект 302 может иметь высоту, обозначенную как h, которая может быть известна и/или задана.
[00110] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 3, изображение 312 объекта 302, например, когда захвачено через линзу 310, может иметь отображенную высоту, обозначенную как h'.
[00111] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние, обозначенное как и, между линзой 310 и объектом 302 может быть определено, например, на основании эффективного фокусного расстояния (EFL) линзы 310, которое может быть известно и/или задано, высоты h и/или отображенной высоты h', например, как описано ниже.
[00112] Согласно некоторым приведенным в качестве примера вариантам реализации следующее уравнение может быть задано, например, на основании подобия треугольников в схеме 300 отображения, например, следующим образом:

где v - приблизительно эффективное фокусное расстояние (EFL) линзы 310.
[00113] Согласно некоторым приведенным в качестве примера вариантам реализации отображенная высота h' изображения 312 может быть основана на количестве пикселов, обозначенных как {h'_pixels_estimated}, занятых изображением 312, и шаге датчика, обозначенного как pitch, линзы 310, например, следующим образом:

[00114] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние и может быть определено, например, на основании Уравнения 2 и Уравнения 3, например, следующим образом:

[00115] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 3, объект 302 может быть вертикальным, например, без наклона.
[00116] Согласно некоторым приведенным в качестве примера вариантам реализации объект, который будет захвачен камерой, может быть наклонным, например, как описано ниже со ссылкой на ФИГ. 4.
[00117] На ФИГ. 4 схематично показана представляющая диаграмма 400 захвата изображения наклонного объекта 402 в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[00118] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 4, изображение 412 наклонного объекта 402 может быть захвачено через линзу 410 камеры. Например, камера 118 (на Фиг. 1) может содержать линзу 410.
[00119] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 4, объект 402 может иметь высоту, обозначенную как h, который может быть известна и/или задана.
[00120] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 4, изображение 412 объекта 402, например, когда захвачено через линзу 410, может иметь отображенную высоту, обозначенную как h'.
[00121] Согласно некоторым приведенным в качестве примера вариантам реализации как показано на ФИГ. 4, отображенная высота h' изображения 412 может отражать проекцию объекта 402 на плоскость 407 под углом наклона, обозначенным как θ.
[00122] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 4, проекция высоты h может привести к ошибке и/или уменьшению, обозначенному как Δh, высоты h объекта 402, которое может уменьшить отображенную высоту h' изображения 412.
[00123] Согласно некоторым приведенным в качестве примера вариантам реализации ошибка Δh в размере h объекта может быть определена, например, следующим образом:

[00124] Согласно данному варианту реализации для принятой ошибки Δh, которая может быть результатом, например, угла наклона +70° (градусов), относительная погрешность высоты может составлять приблизительно, например, +1,5% (процента).
[00125] Согласно некоторым приведенным в качестве примера вариантам реализации относительная погрешность может влиять на оценочное расстояние, например, в пределах того же процента.
[00126] Как показано на ФИГ. 1, согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и объектом, например, на основании трехмерных декартовых координат объекта, например, как описано ниже.
[00127] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать трехмерный датчик 124, выполненный с возможностью определения трехмерных декартовых координат объекта.
[00128] Согласно некоторым приведенным в качестве примера вариантам реализации трехмерный датчик 124 может быть выполнен с возможностью преобразования объекта в набор точек, например, 3 точек, обозначенных как {xi, yi, zi}, например, в трехмерных декартовых координатах.
[00129] Согласно одному варианту реализации набор точек может включать в себя проецируемую структуру, включая зависимую от расстояния структуру, структуру с определением расстояния из расфокусировки, стерескопическую триангуляционную структуру и/или тому подобное.
[00130] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние, обозначенное как d, между объектом и камерой 118 может быть определено, например, следующим образом:

где:
{х0, у0, z0} - местоположение камеры, например, в той же самой системе декартовых координат, что и объект; и
k - дискретная точка на объекте, которая была захвачена трехмерным датчиком 124.
[00131] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнен с возможностью оценки расстояния от камеры до объекта, например, на основании информации от трехмерного датчика 124.
[00132] Согласно некоторым приведенным в качестве примера вариантам реализации трехмерный датчик 124 может быть выполнен с возможностью предоставления информации, описывающей каждый пиксел на изображении или каждую группу пикселов на изображении в зависимости от расстояния от камеры или в зависимости от абсолютного размера, например, в метрах, дюймах или любых других единицах измерения размера.
[00133] Согласно одному варианту реализации функция расстояния может позволить приложению 160 определять расстояние между объектом и камерой 118.
[00134] Согласно еще одному варианту реализации функция абсолютного размера может обеспечить возможность определения расстояния до объекта, например, на основании Уравнения 4. Согласно одному варианту реализации приложение 160 может определять размер h объекта, например, на основании информации от трехмерного датчика 124, например, путем оценки того, сколько пикселов занимает отображенная высота объекта на изображении.
[00135] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между камерой 118 и глазом пользователя, например, даже без использования объекта, например, при использовании информации об ускорении, соответствующей ускорению устройства 102, например, как описано ниже.
[00136] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения оценочного расстояния между камерой 118 и глазами пользователя, например, на основании информация об ускорении, указывающей ускорение устройства 102, например, как описано ниже.
[00137] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать акселерометр 126 для предоставления приложению 160 информации об ускорении устройства 102.
[00138] Согласно некоторым приведенным в качестве примера вариантам реализации акселерометр 126 может быть выполнен с возможностью предоставления информации об ускорении в данный момент времени, например, для каждой оси, например, системы декартовых координат.
[00139] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между камерой 118 и глазами пользователя, например, на основании удовлетворения набору из двух условий, например, как описано ниже.
[00140] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 выполнено с возможностью определения расстояния между камерой 118 и глазами пользователя, например, после выполнения процедуры инициализации, которая может включать в себя задание первоначального расстояния, обозначенного как x0, между глазом пользователя и камерой 118 при удерживании устройства 102 вплотную к глазу пользователя.
[00141] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может принудить устройство 102 к инструктированию пользователя о начале измерения расстояния между камерой 118 и глазами пользователя, например, после процедуры инициализации, путем инструктажа пользователя о перемещении устройства 102 по направлению от глаз.
[00142] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может принимать от акселерометра 126 информацию об ускорении устройства 102, например, для одной или более, например, всех осей системы декартовых координат, например, в соответствии с перемещением устройства 102.
[00143] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может определять расстояние вдоль оси X, обозначенное как x(t'), в данный момент времени, например, на основании информации, обозначенной как ax(t), об ускорении вдоль оси X в данный момент времени, например, следующим образом:

[00144] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может определять расстояние x(t') вдоль оси X, например, на основании скорости, обозначенной как vx(t'), устройства 102 в данный момент времени, например, следующим образом:

[00145] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может определять расстояние вдоль оси Y, обозначенное как y(t'), например, на основании ускорения, обозначенного как ay(t), устройства 102 вдоль оси Y, например, способом, подобным определению расстояния x(t').
[00146] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может определять расстояние вдоль оси Z, обозначенное как z(t'), например, на основании ускорения, обозначенного как az(t), устройства 102 вдоль оси Z, например, способом, подобным определению расстояния x(t').
[00147] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может определять оценочное расстояние, обозначенное как r(t'), от камеры 118 до глаза, например, на основании расстояния вдоль оси X, расстояния вдоль оси Y и расстояния вдоль оси Z, например, следующим образом:

[00148] Согласно некоторым приведенным в качестве примера вариантам реализации точность оценочного расстояния r(t') может быть увеличена, например, путем использования более чем одного измерения для оценки расстояния, например, как описано ниже.
[00149] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью использования информации об ускорении в сочетании с информацией от других измеряющих расстояние датчиков, например, для увеличения диапазона измерений, повышения надежности, точности и/или чувствительности.
[00150] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью повышения точности оценки расстояния акселерометром 126, например, путем интегрирования одного или более изображений, захваченных камерой 118, например, в дополнение к информации об ускорении.
[00151] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью управления, принуждения, задействования и/или инструктирования камеры 118 для захвата одного или более изображений, например, во время перемещения устройства 102, например, после процедуры инициализации.
[00152] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью использования информации из захваченных изображений, например, для повышения точности оценочного расстояния, например, на основании информации об ускорении.
[00153] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может использовать информацию из захваченных изображений, например, когда захваченные изображения содержат объект, который имеет известные размеры, например, как описано выше.
[00154] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между парой захваченных изображений, например, на основании изменения увеличения объекта.
[00155] Согласно некоторым приведенным в качестве примера вариантам реализации ошибка информации акселерометра может не накапливаться в течение всего перемещения устройства 102, например, если расстояние между парой изображений используется для оценки информации об ускорении.
[00156] Согласно одному варианту реализации процедура инициализации может быть выполнена в момент времени, обозначенный как t'0, сопровождаемый N захватами камерой в моменты времени, обозначенные как {t'1, t'2, t'3, t'4…t'N}, на расстояниях, обозначенных как {r'1, r'2, r'3, r'4…r'N}, определенных из данных датчика акселерометрической информации и на основании соответствующих размеров, обозначенных как {h'1, h'2, h'3, h'4…h'N}, объекта в захваченных изображениях.
[00157] Согласно некоторым приведенным в качестве примера вариантам реализации оптимизация измерений расстояния, относящихся к акселерометрической информации, может быть осуществлена для уменьшения ошибки акселерометрической информации, например, если все захваченные изображения соответствуют тому же размеру h объекта.
[00158] Согласно некоторым приведенным в качестве примера вариантам реализации уравнение для оптимизации минимальной ошибки может быть задано, например, следующим образом:

[00159] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между плоскостью зрачков пользователя ("плоскость зрачков") и камерой 118, например, для определения межзрачкового расстояния пользователя.
[00160] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между плоскостью зрачков и камерой 118, например, после определения расстояния от камеры 118 до объекта, например, с использованием трехмерного датчика 124, акселерометра 126 и/или захваченных изображений, содержащих объект, например, как описано выше.
[00161] Согласно некоторым приведенным в качестве примера вариантам реализации вычисление расстояния между плоскостью зрачков и камерой 118 может обеспечить возможность определения увеличения в плоскости зрачков, которое может обеспечить возможность вычисления абсолютного расстояния между зрачками.
[00162] Согласно некоторым приведенным в качестве примера вариантам реализации вычисление расстояния между плоскостью зрачков и камерой 118 может обеспечить возможность определения угла, под которым глаза смотрят на камеру, например, для аккомодации для сведения глаз, когда пользователь смотрит на камеру 118.
[00163] Согласно некоторым приведенным в качестве примера вариантам реализации благодаря допущению, что камера 118 приспосабливается к искажениям, вызванным аберрацией, созданной плоским датчиком и неоптимальной линзой, увеличение вдоль плоскости, перпендикулярной датчику или апексу линзы камеры 118, может быть однородным, и подушкообразные и бочкообразные искажения могут быть минимальными.
[00164] Согласно некоторым приведенным в качестве примера вариантам реализации увеличение, обозначенное как "Mobject(camera_object_distnace)", может задавать преобразование между оценочным количеством пикселов, обозначенным как "hobj'_pixels_estimated", в захваченном размере, обозначенном как h'obj, объекта в захваченном изображении в плоскости, перпендикулярной датчику камеры 118, и абсолютным размером объекта, обозначенным как hobj, в плоскости, содержащей данный объект.
[00165] Согласно некоторым приведенным в качестве примера вариантам реализации определение увеличения может обеспечить возможность определения отношения пиксел/мм, которое может обеспечить возможность вычисления межзрачкового расстояния PD на основании захваченного изображения, например, вычислением количества пикселов, например, как описано ниже.
[00166] Согласно одному варианту реализации может быть предположено, что камера 118 может быть наклонной, и один или более элементов в захваченном изображении могут находиться на различных расстояниях от камеры 118. Согласно данному варианту реализации каждый набор пикселов в захваченном изображении может представлять различное увеличение.
[00167] Согласно некоторым приведенным в качестве примера вариантам реализации увеличение может быть основано на расстоянии между камерой 118 и объектом, например, следующим образом:

[00168] Согласно некоторым приведенным в качестве примера вариантам реализации абсолютный размер, например, высота hobj, объекта может быть определен на основании увеличения и отображенного размера, например, отображенной высоты h'obj, например, следующим образом:

[00169] Согласно некоторым приведенным в качестве примера вариантам реализации объект может не позиционироваться на плоскости зрачков. Например, объект может позиционироваться на лбу пользователя.
[00170] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения изменения увеличения между плоскостью объекта, которая содержит объект, и плоскостью зрачков с учетом наклона камеры 118 во время захвата.
[00171] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между плоскостью зрачков пользователя и камерой 118, например, на основании осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, например, плоскости объекта, например, как описано ниже.
[00172] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения осевого смещения между объектом и зрачками вдоль ось, перпендикулярной плоскости, содержащей объект, например, как описано ниже.
[00173] Согласно некоторым приведенным в качестве примера вариантам реализации вычисление осевого смещения может обеспечить возможность определения изменения увеличения между плоскостью объекта и плоскостью зрачков.
[00174] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения изменения увеличения с учетом наклона камеры 118.
[00175] Согласно одному варианту реализации камера 118 может быть не вертикальной относительно земли, например, при захвате изображения, содержащего объект.
[00176] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения расстояния между плоскостью зрачков и плоскостью объекта, например, на основании осевого смещения и наклона камеры 180, например, как описано ниже.
[00177] Согласно некоторым приведенным в качестве примера вариантам реализации устройство 102 может содержать ориентационный оцениватель 128, выполненный с возможностью определения ориентации устройства 102 и/или ориентации одного или более элементов устройства 102, например, камеры 118.
[00178] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью приема, например, от ориентационного оценивателя 128, ориентационной информации, указывающей ориентацию устройства 102, например, когда изображение захвачено.
[00179] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании ориентационной информации.
[00180] Согласно некоторым приведенным в качестве примера вариантам реализации ориентационная информация может указывать ориентацию камеры 118.
[00181] Согласно некоторым приведенным в качестве примера вариантам реализации ориентационная информация может указывать угол наклона камеры 118.
[00182] согласно одному варианту реализации приложение 160 может быть выполнено с возможностью определения угла наклона камеры 118, например, когда изображение захвачено, например, на основании ориентации камеры 118 и/или ориентации устройства 102.
[00183] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании ориентационной информации и осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, например, как описано ниже.
[00184] На ФИГ. 5 схематично показана диаграмма 500 захвата для захвата объекта 502 наклонной камерой 518 в соответствии с некоторыми приведенными в качестве примера вариантами реализации. Например, камера 518 может выполнять функции камеры 118 (на Фиг. 1).
[00185] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, камера 518 может быть наклонной с углом наклона, обозначенным как θ, например, относительно горизонта.
[00186] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, камера 518 может быть расположена на расстоянии, обозначенном как "camera_obj_distance", от объекта 502.
[00187] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, объект 502 может быть расположен с горизонтальным смещением, обозначенным как "horizontal_offset", и вертикальным смещением, обозначенным как "ver_offset", относительно глаз 506 пользователя.
[00188] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, глаза 530 могут лежать в плоскости 527, обозначенной как "eyes_plane", например, плоскости зрачков, которая перпендикулярна датчику камеры 118.
[00189] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, объект 502 может лежать в плоскости 529, обозначенной как "object_plane", которая перпендикулярна датчику камеры 118.
[00190] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, может иметься осевое смещение, обозначенное как "axis_offset", вдоль оси, перпендикулярной плоскости 527 и плоскости 529.
[00191] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, осевое смещение может задавать расстояние между плоскостью 527 и плоскостью 529.
[00192] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 5, может иметься проекция вертикального смещения, обозначенная как "projected_ver_offset", между центрами глаз 530 и объектом 502, когда центры глаз 530 и объект 502 проецируются на плоскость 529 и/или плоскость 527.
[00193] Согласно некоторым приведенным в качестве примера вариантам реализации может быть предположено, что увеличение захваченного изображения является однородным вдоль плоскостей, перпендикулярных датчику камеры, например, плоскости 527 и/или плоскости 529.
[00194] Согласно некоторым приведенным в качестве примера вариантам реализации осевое смещение может быть определено на основании проекции вертикального смещения, горизонтального смещения и угла наклона, например, следующим образом:

[00195] Согласно некоторым приведенным в качестве примера вариантам реализации проекция вертикального смещения может быть определена, например, путем анализа вертикального перемещения глаз 530 по направлению от объекта 502 на проецируемой плоскости, например, плоскости 529, например, путем оценки количества пикселов между центрами камеры 518 и глаз 530 в захваченном изображении.
[00196] Согласно некоторым приведенным в качестве примера вариантам реализации горизонтальное смещение может быть дано, вычислено и/или может быть задано, например, приблизительно 30 мм.
[00197] Согласно некоторым приведенным в качестве примера вариантам реализации увеличение, обозначенное как Meyes, в плоскости зрачков, например, плоскости 527, может быть основано на расстоянии от камеры 518 до плоскости зрачков.
[00198] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние от камеры 518 до плоскости зрачков может быть основано на сумме расстояния от объекта до камеры 118 и осевого смещения, например, как может быть определено согласно Уравнению 13.
[00199] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние, обозначенное как и, между камерой и плоскостью зрачков может быть задано на основании суммы расстояния от объекта до камеры 118 и осевого смещения, например, следующим образом:

[00200] Согласно некоторым приведенным в качестве примера вариантам реализации увеличение, обозначенное как Meyes(u), на расстоянии u может быть определено, например, следующим образом:

[00201] Как показано на ФИГ. 1, согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью идентификации местоположения на зрачке, через который пользователь смотрит в камеру 118, например, при захвате изображения.
[00202] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью идентификации местоположения на зрачке, через который пользователь смотрит в камеру 118, например, на основании отражения света от глаза в захваченном изображении, например, как описано ниже.
[00203] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью идентификации местоположения на зрачке, через который пользователь смотрит в камеру 118, например, на основании первого образа Пуркинье.
[00204] На ФИГ. 6 схематично показан горизонтальный разрез правого глаза 600 пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[00205] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 6, горизонтальный разрез правого глаза 600 может изображать различие между зрительной осью 602 и оптической осью 604 правого глаза 600.
[00206] Согласно некоторым приведенным в качестве примера вариантам реализации местоположение 606, в котором зрительная ось 602 пересекает зрачок, может использоваться для измерения межзрачкового расстояния PD, например, поскольку глаз 600 может вращаться для рассмотрения более четкого изображения, например, камеры 118, которая отображена в фовеальной ямке 610 сетчатки.
[00207] Согласно некоторым приведенным в качестве примера вариантам реализации фовеальная ямка 610 может быть расположена примерно на 5° к виску, например, по направлению к уху, например, при наблюдении сверху, относительно оптической оси 604. Таким образом, линия взгляда, в направлении которой глаз вращается для рассматривания объекта, может не совпадать с оптической осью 604, которая представляет собой линию, соединяющую апекс роговицы и центр зрачка. Соответственно, местоположение 606 может не находиться в центре зрачка.
[00208] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 (на Фиг. 1) может быть выполнено с возможностью идентификации местоположения 606, например, на основании отражения источника 122 света на глазу 600 в захваченном изображении.
[00209] Согласно одному варианту реализации местоположение 606 может быть идентифицировано, например, поиском первого отражения, например, первого образа Пуркинье, который является отражением источника 122 света, отображенного самой наружной отражающей поверхностью роговицы. Глаз может вращаться для рассмотрения источника 122 света, и отражающая поверхность роговицы может быть перпендикулярна источнику 122 света. Таким образом, первое отражение может проходить вдоль зрительной оси 602. Соответственно, местоположение 606 может быть определено на основании первого отражения в захваченном изображении.
[00210] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 (на Фиг. 1) может быть выполнено с возможностью определения межзрачкового расстояния PD, например, на основании местоположения 606 правого глаза 600 и местоположения второго отражения в левом глазу, например, вместо использования центра зрачка или произвольного местоположения в зрачке.
[00211] Как показано на ФИГ. 1, согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью определения количества пикселов, обозначенного как "heyes'_pixels_estimated", между первым и вторым отражениями в захваченном изображении, например, местоположением 606 (на Фиг. 6) правого глаза 600 (на Фиг. 6) и местоположением второго отражения левого глаза.
[00212] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью вычисления межзрачкового расстояния PD, обозначенного как "PDconvergence", для сходящихся глаз, например, когда глаза смотрят в камеру 118.
[00213] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью вычисления межзрачкового расстояния PD для сходящихся глаз, например, на основании шага датчика и увеличения в плоскости зрачков и количества пикселов, например, следующим образом;

[00214] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью вычисления межзрачкового расстояния PD, например, когда глаза смотрят в бесконечность ("глаза бесконечности").
[00215] Согласно некоторым приведенным в качестве примера вариантам реализации приложение 160 может быть выполнено с возможностью вычисления коррекции между межзрачковым расстоянием для сходящихся глаз и межзрачковым расстоянием для глаз бесконечности, например, как описано ниже.
[00216] На ФИГ. 7 схематично показано межзрачковое расстояние PD между двумя глазами 720 из пользователя, смотрящего в камеру 718, в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[00217] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 7, камера 718 может быть расположена на расстоянии, обозначенном как "camera_eye_distance", от глаз 720.
[00218] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 7, каждый глаз 720 вращается под углом ϕ, например, по направлению к области носа пользователя, чтобы смотреть на камеру 718.
[00219] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 7, местоположение 706 зрительной оси 708, пересекающей зрачок, может быть смещено в поперечном направлении на расстояние аккомодации, обозначенное как т, по направлению к местоположению 709, например, по направлению к ушам пользователя, например, когда глаза 720 смотрят в бесконечность.
[00220] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние т аккомодации может быть, например, результатом вращения глаз 730 с радиусом, обозначенным как R, на угол ϕ в местоположение 709, например, для того, чтобы смотреть в бесконечность.
[00221] Согласно некоторым приведенным в качестве примера вариантам реализации с допущением, что центры вращения глаз 720 равны, радиусы R глаз могут быть равны заданному значению, например, примерно 13,5 мм.
[00222] Согласно некоторым приведенным в качестве примера вариантам реализации местоположения 709 могут быть учтены, например, при определении межзрачкового расстояния, например, в случае очков для дальнего зрения.
[00223] Согласно некоторым приведенным в качестве примера вариантам реализации, как показано на ФИГ. 7, межзрачковое расстояние для сходящихся глаз, обозначенное как межзрачковое расстояние PD(ϕ), может быть задано, например, когда глаза 720 сходятся для того, чтобы смотреть по направлению к вспышке камеры 718, например, если камера 718 расположена на расстоянии е, которое не является расстоянием бесконечности, например, расстоянии "camera_eye_distance".
[00224] Согласно некоторым приведенным в качестве примера вариантам реализации угол ϕ может быть выражен следующим образом:

[00225] Согласно некоторым приведенным в качестве примера вариантам реализации межзрачковое расстояние для глаз бесконечности, обозначенное как "PDinfinity", например, когда глаза 720 смотрят в бесконечность, может быть определено, например, на основании суммы межзрачкового расстояния "PDconvergence" для сходящихся глаз и расстояния аккомодации т для этих двух глаз 720, например, следующим образом:

[00226] Согласно некоторым приведенным в качестве примера вариантам реализации межзрачковое расстояние PDinfinity может быть определено, например, объединением Уравнения 17 и Уравнения 18, например, следующим образом:

[00227] Согласно некоторым приведенным в качестве примера вариантам реализации отрицательная обратная связь позволяет уменьшить накопленную ошибку. Например, в случае, если расчетное горизонтальное смещение "horizontal_offset" является более длинным, чем реальное горизонтальное смещение, например, между глазом и объектом, расстояние "camera_eye_distance" может быть более длинным и, например, может привести к увеличенному межзрачковому расстоянию PD в плоскости глаз. Однако, аккомодация для преобразования, например, расстояния т, от большего расстояния, например, позволяет уменьшить угол ср, что может привести к уменьшенному добавлению межзрачкового расстояния, в результате чего может быть уменьшена накопленная ошибка.
[00228] На ФИГ. 8A-8F схематично показаны гистограммы моделей по методу Монте Карло в соответствии с некоторыми приведенными в качестве примера вариантами реализации.
[00229] Согласно некоторым приведенным в качестве примера вариантам реализации указанные модели учитывают вариации расстояния между камерой и объектом, например, в пределах 300-900 мм, оценку ошибки расстояния от камеры до объекта, например, между -5 мм и 15 мм, и ошибку горизонтального смещения между зрачками и объектом, например, между - 15 мм и 5 мм.
[00230] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8А показывает гистограмму моделей по методу Монте Карло для оценки накопленных ошибок, происходящих из ошибки камеры при оценке объекта, имеющего известный размер, например, когда камеру размещают на различных расстояниях.
[00231] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8В показывает гистограмму моделей по методу Монте Карло для оценки накопленных ошибок, происходящих из ошибки камеры при оценке объекта, имеющего известный размер.
[00232] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8С показывает гистограмму моделей по методу Монте Карло для оценки ошибки горизонтального смещения между зрачками и объектом.
[00233] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8D показывает гистограмму моделей по методу Монте Карло для изображения вариации номинального межзрачкового расстояния.
[00234] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8Е показывает результат накопленной ошибки горизонтальной оси, представленный в форме гистограммы.
[00235] Согласно некоторым приведенным в качестве примера вариантам реализации горизонтальная ось на ФИГ. 8Е задает накопленную ошибку, и вертикальная ось задает количество испытаний, которое имеет результатом это количество ошибок, например, когда количество моделирований составляет: N=1000.
[00236] Согласно некоторым приведенным в качестве примера вариантам реализации ФИГ. 8F изображает гистограмму, показывающую, что полная ошибка измеренного межзрачкового расстояния PD находится в диапазоне [-1, +1] мм по меньшей мере для 95% случаев.
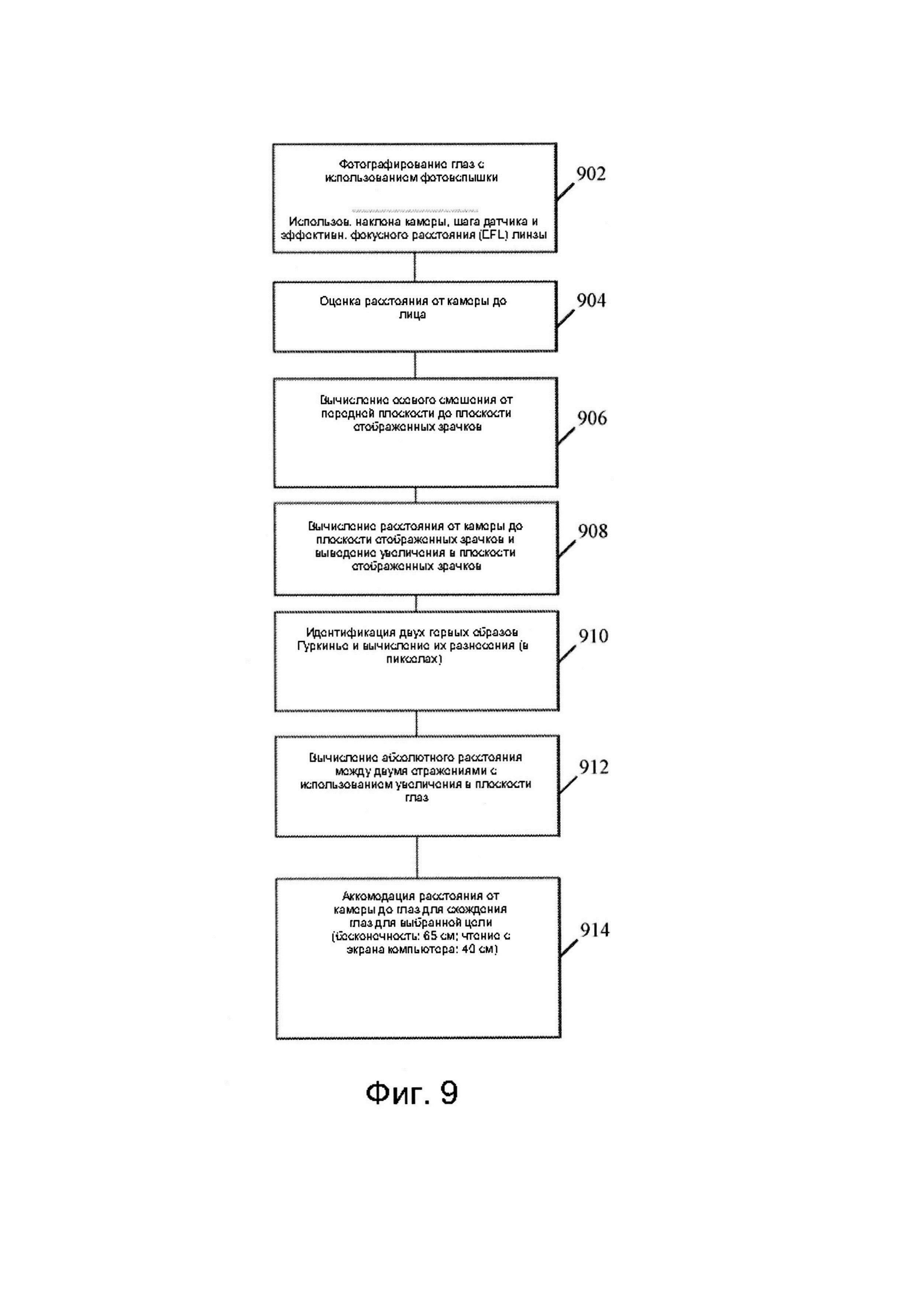
[00237] На ФИГ. 9 схематично показан способ определения межзрачкового расстояния PD пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации. Например, один или более этапов способа, показанного на ФИГ. 9, могут быть выполнены: мобильным устройством, например, устройством 102 (на Фиг. 1); сервером, например, сервером 170 (на Фиг. 1); и/или приложением, например, приложением 160 (на Фиг. 1).
[00238] Этап 902 способа может включать в себя захват изображения глаз пользователя, смотрящего на вспышку камеры, и прием информации, относящейся к ориентации камеры, шагу датчика камеры и эффективному фокусному расстоянию (EFL) линзы камеры. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью приема захваченного изображения, содержащего первое и второе отражения, от камеры 118 (на Фиг. 1), и приема ориентационной информации, шага датчика и эффективного фокусного расстояния (EFL) камеры 118 (на Фиг. 1), например, как описано выше.
[00239] Этап 904 способа может включать в себя оценку расстояния от камеры до объекта на лице пользователя. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью оценки расстояния между камерой 118 и эталонным объектом, например, с использованием информации от трехмерного датчика 124 (на Фиг. 1), информации об ускорении от акселерометра 128 (на Фиг. 1) и/или на основании размеров объекта, например, как описано выше.
[00240] Этап 906 способа может включать в себя вычисление осевого смещения между плоскостью объекта, содержащей объект, и плоскостью зрачков, содержащей зрачки пользователя, например, на основании ориентации камеры. Например, приложение 160 (на ФИГ. 1) может быть выполнено с возможностью определения осевого смещения между плоскостью объекта и плоскостью зрачков, например, на основании ориентационной информации от ориентационного оценивателя 128 (на ФИГ. 1), например, как описано выше.
[00241] Этап 908 способа может включать в себя определение увеличения в плоскости зрачков на основании осевого расстояния и измеренного расстояния от камеры до объекта, например, с использованием эффективного фокусного расстояния (EFL) и шага датчика. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью определения увеличения в плоскости зрачков, например, на основании осевого смещения и расстояния от камеры 118 (на Фиг. 1) до объекта, например, как описано выше.
[00242] Этап 910 способа может включать в себя идентификацию первого и второго отражений вспышки на глазах пользователя и измерение расстояния, например, в пикселах, между первым отражением и вторым отражением. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью оценки расстояния, например, в пикселах, между первым отражением и вторым отражением, например, как описано выше.
[00243] Этап 912 способа может включать в себя преобразование расстояния в пикселах в расстояние в единицах длины, например, согласно увеличению в плоскости зрачков. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью оценки расстояния между первым отражением и вторым отражением, например, как описано выше.
[00244] Этап 914 способа может включать в себя аккомодацию измеренного расстояния для схождения глаз, например, вычислением местоположения, в котором первое и второе отражения могут быть отображены для глаз, смотрящих в бесконечность, и задание межзрачкового расстояния для очков для дальнего зрения на основании этой аккомодации. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью определения межзрачкового расстояния PDinfinity, например, на основании расстояния т, например, как описано выше.
[00245] Согласно некоторым приведенным в качестве примера вариантам реализации способ в качестве варианта может включать в себя вычисление местоположений, в которых могут быть отображены первое и второе отражения для поворота глаз, смотрящих на близком расстоянии, например, заданном расстоянии 45 см, и задание ближнего межзрачкового расстояния для зрения на малом расстоянии.
[00246] Согласно некоторым приведенным в качестве примера вариантам реализации способ определения межзрачкового расстояния PD пользователя может включать в себя, например, только некоторые из этапов, показанных на ФИГ. 9, например, без включения в себя одного или более других этапов способа, показанного на ФИГ. 9.
[00247] Согласно некоторым приведенным в качестве примера вариантам реализации способ определения межзрачкового расстояния PD может быть осуществлен, например, даже без выполнения одной или более, например, всех операций, описанных выше в отношении этапов 906 и/или 908, например, если расстояние между камерой и зрачками известно или определено.
[00248] Согласно некоторым приведенным в качестве примера вариантам реализации расстояние между камерой и зрачками может быть определено, например, на основании размера лицевого элемента пользователя.
[00249] Согласно одному варианту реализации способ определения межзрачкового расстояния PD может включать в себя: калибровку и/или измерение размера лицевого элемента, например, диаметра радужной оболочки; захват изображения лица с использованием вспышки камеры; и определение расстояния от камеры до зрачков, например, на основании лицевого элемента.
[00250] Согласно некоторым приведенным в качестве примера вариантам реализации калибровка и/или измерение лицевого элемента могут быть осуществлены, например, захватом изображения, содержащего объект лица и эталонный объект, например, кредитную карту, которая может быть размещена на лице пользователя.
[00251] Например, пользователь может закрыть один свой глаз эталонным объектом, например, кредитной картой, например, для обеспечения возможности калибровки диаметра радужной оболочки другого глаза.
[00252] На ФИГ. 10 схематично показан способ определения межзрачкового расстояния PD пользователя в соответствии с некоторыми приведенными в качестве примера вариантами реализации. Например, один или более этапов способа, показанного на ФИГ. 10, могут быть выполнены: мобильным устройством, например, устройством 102 (на Фиг. 1); сервером, например, сервером 170 (на Фиг. 1); и/или приложением, например, приложением 160 (на Фиг. 1).
[00253] Этап 1002 способа может включать в себя прием захваченного изображения, содержащего первое и второе отражения света от источника света, причем первое отражение содержит отражение света от первого зрачка пользователя. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью приема захваченного изображения, содержащего первое и второе отражения, например, как описано выше.
[00254] Этап 1004 способа может включать в себя определение межзрачкового расстояния на основании местоположения первого и второго отражений в захваченном изображении и оценку расстояния между камерой, используемой для захвата изображения, и зрачками пользователя, когда изображение захвачено. Например, приложение 160 (на Фиг. 1) может быть выполнено с возможностью определения межзрачкового расстояния пользователя, например, на основании местоположений первого и второго отражений в захваченном изображении, и оценки расстояния между устройством 102 (на Фиг. 1) и зрачками пользователя, когда изображение захвачено, например, как описано выше.
[00255] На ФИГ. 11 схематично показано изделие в виде продукта 1000 в соответствии с некоторыми приведенными в качестве примера вариантами реализации. Продукт 1100 может содержать один или более материальных компьютерочитаемых некратковременных носителей 1102 данных, которые могут включать в себя исполняемые компьютером инструкции, например, осуществляемые логическим средством 1104, которые при их исполнении по меньшей мере одним компьютерным процессором обеспечивают возможность выполнения по меньшей мере одним компьютерным процессором одного или более этапов в устройстве 102 (на ФИГ. 1), сервере 170 (на ФИГ. 1) и/или приложении 160 (на ФИГ. 1), и/или выполнения, задействования и/или осуществления одного или более этапов, связей и/или функциональных средств согласно одному или более чертежам на ФИГ. 1-10, и/или одного или более описанных в настоящей заявке этапов. Выражение "некратковременный компьютерочитаемый носитель" понимается как включающее в себя все компьютерочитаемые носители за единственным исключением, которое является кратковременным распространяющимся сигналом.
[00256] Согласно некоторым приведенным в качестве примера вариантам реализации продукт 1100 и/или компьютерочитаемый носитель 1102 данных может включать в себя компьютерочитаемые носители данных одного или более типов, выполненные с возможностью хранения данных, включая кратковременное запоминающее устройство, некратковременное запоминающее устройство, съемное или несъемное запоминающее устройство, стираемое или нестираемое запоминающее устройство, записываемое или перезаписываемое запоминающее устройство и тому подобное. Например, машиночитаемый носитель 1102 данных может включать в себя ОЗУ, динамическое ОЗУ (DRAM), динамическое ОЗУ с удвоенной скоростью передачи данных (DDR-DRAM), синхронное динамическое ОЗУ (SDRAM), статическое ОЗУ (SRAM), ПЗУ, программируемое ПЗУ (ППЗУ), стираемое программируемое ПЗУ (СППЗУ) (EPROM), электрически стираемое программируемое ПЗУ (ЭСППЗУ) (EEPROM), ПЗУ на основе компакт-диска (CD-ROM), записываемый компакт-диск (CD-R), перезаписываемый компакт-диск (CD-RW), флэш-память (например, запоминающее устройство типа NOR-флэш или NAND-флэш), ассоциативное запоминающее устройство (САМ), запоминающее устройство на полимере, запоминающее устройство на фазовых переходах, сегнетоэлектрическое запоминающее устройство, запоминающее устройство со структурой "кремнй-оксид-нитрид-оксид-кремний" (SONOS), диск, гибкий диск, жесткий диск, оптический диск, магнитный диск, карту, магнитную карту, оптическую карту, ленту, кассету и тому подобное. Компьютерочитаемые носители данных могут включать в себя любые подходящие носители, используемые при загрузке или передаче из удаленного компьютера в запрашивающий компьютер компьютерной программы, переносимой сигналами данных, реализованными в несущей волне или другом носителе для распространения, посредством линии связи, например, модема, радио- или сетевого соединения.
[00257] Согласно некоторым приведенным в качестве примера вариантам реализации логическое средство 1104 может включать в себя инструкции, данные и/или код, которые при их исполнении машиной могут принудить машину выполнять способ, процесс и/или этапы, как описано в настоящей заявке. Машина может включать в себя, например, любую подходящую процессорную платформу, вычислительную платформу, вычислительное устройство, обрабатывающее устройство, вычислительную систему, обрабатывающую систему, компьютер, процессор или тому подобное, и может быть реализована с использованием любого подходящего сочетания аппаратных средств, программного обеспечения, прошивки и тому подобного.
[00258] Согласно некоторым приведенным в качестве примера вариантам реализации логическое средство 1104 может включать в себя программное обеспечение, программный модуль, приложение, программу, подпрограмму, инструкции, систему команд, вычислительный код, слова, значения, символы и тому подобное или может быть осуществлено как вышеуказанное. Инструкции могут включать в себя код любого подходящего типа, такой как исходный код, откомпилированный код, интерпретированный код, исполняемый код, статический код, динамический код и тому подобное. Инструкции могут выполняться согласно заданному машинному языку, способу или синтаксису для принуждения процессора к выполнению определенной функции. Инструкции могут быть реализованы с использованием любого подходящего высокоуровневого, низкоуровневого, объектно-ориентированного, визуального, компилируемого и/или интерпретируемого языка программирования, такого как С, С++, Java, БЕЙСИК (BASIC), Matlab, Паскаль (Pascal), визуальный Бейсик (Visual BASIC), ассемблер, машинный код и тому подобное.
ПРИМЕРЫ
[00259] Следующие примеры относятся к дополнительным вариантам реализации.
[00260] Пример 1 включает в себя продукт, содержащий один или более материальных компьютерочитаемых некратковременных носителей данных, содержащих исполняемые компьютером инструкции, которые при их исполнении по меньшей мере одним компьютерным процессором обеспечивают возможность выполнения по меньшей мере одним компьютерным процессором этапов измерения межзрачкового расстояния между зрачками пользователя, причем указанные этапы включают в себя: прием захваченного изображения, содержащего первое и второе отражения света от источника света, при этом первое отражение содержит отражение света от первого зрачка пользователя, и второе отражение содержит отражение света от второго зрачка пользователя; и определение межзрачкового расстояния на основании местоположения первого и второго отражений в захваченном изображении и оценочного расстояния между устройством для захвата изображения и зрачками пользователя, когда изображение захвачено.
[00261] Пример 2 включает в себя предмет Примера 1, причем в качестве варианта захваченное изображение содержит объект на лице пользователя, и оценочное расстояние основано на одном или более размеров объекта.
[00262] Пример 3 включает в себя предмет Примера 2, причем в качестве варианта этапы включают в себя определение осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, и определение межзрачкового расстояния на основании осевого смещения.
[00263] Пример 4 включает в себя предмет Примера 2 или 3, причем в качестве варианта оценочное расстояние основано на трехмерных (3D) Декартовых координатах элемента лица.
[00264] Пример 5 включает в себя предмет любого из Примеров 1-4, причем в качестве варианта оценочное расстояние основано на информации об ускорении, указывающей ускорение устройства для захвата изображения.
[00265] Пример 6 включает в себя предмет любого из Примеров 1-5, причем в качестве варианта этапы включают в себя определение межзрачкового расстояния на основании количества пикселов между первым и вторым отражениями и отношения пиксел/миллиметр для данных пикселов.
[00266] Пример 7 включает в себя предмет любого из Примеров 1-6, причем в качестве варианта этапы включают в себя прием ориентационной информации, указывающей ориентацию устройства для захвата изображения, когда изображение захвачено, и определение межзрачкового расстояния на основании ориентационной информации.
[00267] Пример 8 включает в себя предмет Примера 7, причем в качестве варианта ориентационная информация показывает угол наклона устройства для захвата изображения.
[00268] Пример 9 включает в себя предмет любого из Примеров 1-8, причем в качестве варианта этапы включают в себя определение межзрачкового расстояния на основании одного или более атрибутов устройства для захвата изображения.
[00269] Пример 10 включает в себя предмет Примера 9, причем в качестве варианта один или более атрибутов включают в себя по меньшей мере один атрибут, выбранный из группы, состоящей из эффективного фокусного расстояния (EFL) линзы устройства для захвата изображения, горизонтального поля обзора датчика устройства для захвата изображения, вертикального поля обзора датчика, разрешающей способности датчика и расстояния между двумя смежными пикселами датчика.
[00270] Пример 11 включает в себя предмет любого из Примеров 1-10, причем в качестве варианта этапы включают в себя определение межзрачкового расстояния на основании параметра радиуса глаза и расстояния между устройством для захвата изображения и плоскостью, содержащей зрачки.
[00271] Пример 12 включает в себя предмет любого из Примеров 1-11, причем в качестве варианта межзрачковое расстояние включает в себя ближнее межзрачковое расстояние или дальнее межзрачковое расстояние.
[00272] Пример 13 включает в себя мобильное устройство, выполненное с возможностью измерения межзрачкового расстояния между зрачками пользователя, причем указанное мобильное устройство содержит: камеру для захвата изображения, содержащего первое и второе отражения света от источника света, при этом первое отражение содержит отражение света от первого зрачка пользователя, и второе отражение содержит отражение света от второго зрачка пользователя; и вычислитель межзрачкового расстояния для приема захваченного изображения и определения межзрачкового расстояния на основании местоположения первого и второго отражений в захваченном изображении и оценочного расстояния между мобильным устройством и зрачками, когда изображение захвачено.
[00273] Пример 14 включает в себя предмет Примера 13, причем в качестве варианта захваченное изображение содержит объект на лице пользователя, причем оценочное расстояние основано на одном или более размеров объекта.
[00274] Пример 15 включает в себя предмет Примера 14, причем в качестве варианта мобильное устройство выполнено с возможностью определения осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, и определения межзрачкового расстояния на основании осевого смещения.
[00275] Пример 16 включает в себя предмет Примера 14 или 15, причем в качестве варианта оценочное расстояние основано на трехмерных (3D) Декартовых координатах элемента лица.
[00276] Пример 17 включает в себя предмет любого из Примеров 13-16, причем в качестве варианта оценочное расстояние основано на информации об ускорении, указывающей ускорение устройства для захвата изображения.
[00277] Пример 18 включает в себя предмет любого из Примеров 13-17, причем в качестве варианта мобильное устройство выполнено с возможностью определения межзрачкового расстояния на основании количества пикселов между первым и вторым отражениями и отношения пиксел/миллиметр для данных пикселов.
[00278] Пример 19 включает в себя предмет любого из Примеров 13-18, причем в качестве варианта мобильное устройство выполнено с возможностью приема ориентационной информации, указывающей ориентацию устройства для захвата изображения, когда изображение захвачено, и определения межзрачкового расстояния на основании ориентационной информации.
[00279] Пример 20 включает в себя предмет Примера 19, причем в качестве варианта ориентационная информация показывает угол наклона устройства для захвата изображения.
[00280] Пример 21 включает в себя предмет любого из Примеров 13-20, причем в качестве варианта мобильное устройство выполнено с возможностью определения межзрачкового расстояния на основании одного или более атрибутов устройства для захвата изображения.
[00281] Пример 22 включает в себя предмет Примера 21, причем в качестве варианта один или более атрибутов включают в себя по меньшей мере один атрибут, выбранный из группы, состоящей из эффективного фокусного расстояния (EFL) линзы устройства для захвата изображения, горизонтального поля обзора датчика устройства для захвата изображения, вертикального поля обзора датчика, разрешающей способности датчика и расстояния между двумя смежными пикселами датчика.
[00282] Пример 23 включает в себя предмет любого из Примеров 13-22, причем в качестве варианта этапы включают в себя определение межзрачкового расстояния на основании параметра радиуса глаза и расстояния между устройством для захвата изображения и плоскостью, содержащей зрачки.
[00283] Пример 24 включает в себя предмет любого из Примеров 13-23, причем в качестве варианта межзрачковое расстояние включает в себя ближнее межзрачковое расстояние или дальнее межзрачковое расстояние.
[00284] Пример 25 включает в себя способ измерения межзрачкового расстояния между зрачками пользователя, включающий в себя: прием захваченного изображения, содержащего первое и второе отражения света от источника света, причем первое отражение содержит отражение света от первого зрачка пользователя, и второе отражение содержит отражение света от второго зрачка пользователя; и определение межзрачкового расстояния на основании местоположения первого и второго отражений в захваченном изображении и оценочного расстояния между устройством для захвата изображения и зрачками пользователя, когда изображение захвачено.
[00285] Пример 26 включает в себя предмет Примера 25, причем в качестве варианта захваченное изображение содержит объект на лице пользователя, и оценочное расстояние основано на одном или более размеров объекта.
[00286] Пример 27 включает в себя предмет Примера 26, и в качестве варианта включает в себя определение осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, и определение межзрачкового расстояния на основании осевого смещения.
[00287] Пример 28 включает в себя предмет Примера 26 или 27, причем в качестве варианта оценочное расстояние основано на трехмерной (3D) Декартовой координате элемента лица.
[00288] Пример 29 включает в себя предмет любого из Примеров 25-28, причем в качестве варианта оценочное расстояние основано на информации об ускорении, указывающей ускорение устройства для захвата изображения.
[00289] Пример 30 включает в себя предмет любого из Примеров 25-29 и в качестве варианта включает в себя определение межзрачкового расстояния на основании количества пикселов между первым и вторым отражениями и отношения пиксел/миллиметр для этих пикселов.
[00290] Пример 31 включает в себя предмет любого из Примеров 25-30 и в качестве варианта включает в себя прием ориентационной информации, указывающей ориентацию устройства для захвата изображения, когда изображение захвачено, и определение межзрачкового расстояния на основании ориентационной информации.
[00291] Пример 32 включает в себя предмет Примера 31, причем в качестве варианта ориентационная информация показывает угол наклона устройства для захвата изображения.
[00292] Пример 33 включает в себя предмет любого из Примеров 25-32 и в качестве варианта включает в себя определение межзрачкового расстояния на основании одного или более атрибутов устройства для захвата изображения.
[00293] Пример 34 включает в себя предмет Примера 33, причем в качестве варианта один или более атрибутов включают в себя по меньшей мере один атрибут, выбранный из группы, состоящей из эффективного фокусного расстояния (EFL) линзы устройства для захвата изображения, горизонтального поля обзора датчика устройства для захвата изображения, вертикального поля обзора датчика, разрешающей способности датчика и расстояния между двумя смежными пикселами датчика.
[00294] Пример 35 включает в себя предмет любого из Примеров 25-34 и в качестве варианта включает в себя определение межзрачкового расстояния на основании параметра радиуса глаза и расстояния между устройством для захвата изображения и плоскостью, содержащей зрачки.
[00295] Пример 36 включает в себя предмет любого из Примеров 25-35, причем в качестве варианта межзрачковое расстояние включает в себя ближнее межзрачковое расстояние или дальнее межзрачковое расстояние.
[00296] Пример 37 включает в себя устройство для измерения межзрачкового расстояния между зрачками пользователя, содержащее: средство для приема захваченного изображения, содержащего первое и второе отражения света от источника света, причем первое отражение содержит отражение света от первого зрачка пользователя, и второе отражение содержит отражение света от второго зрачка пользователя; и средство для определения межзрачкового расстояния на основании местоположения первого и второго отражений в захваченном изображении и оценочного расстояния между устройством для захвата изображения и зрачками пользователя, когда изображение захвачено.
[00297] Пример 38 включает в себя предмет Примера 37, причем в качестве варианта захваченное изображение содержит объект на лице пользователя, и оценочное расстояние основано на одном или более размеров объекта.
[00298] Пример 39 включает в себя предмет Примера 38 и в качестве варианта включает в себя средство для определения осевого смещения между объектом и зрачками вдоль оси, перпендикулярной плоскости, содержащей объект, и определения межзрачкового расстояния на основании осевого смещения.
[00299] Пример 40 включает в себя предмет Примера 38 или 39, причем в качестве варианта оценочное расстояние основано на трехмерной (3D) декартовой координате элемента лица.
[00300] Пример 41 включает в себя предмет любого из Примеров 37-40, причем в качестве варианта оценочное расстояние основано на информации об ускорении, указывающей ускорение устройства для захвата изображения.
[00301] Пример 42 включает в себя предмет любого из Примеров 37-41 и в качестве варианта включает в себя средство для определения межзрачкового расстояния на основании количества пикселов между первым и вторым отражениями и отношения пиксел/миллиметр для этих пикселов.
[00302] Пример 43 включает в себя предмет любого из Примеров 37-42 и в качестве варианта включает в себя средство для приема ориентационной информации, указывающей ориентацию устройства для захвата изображения, когда изображение захвачено, и определения межзрачкового расстояния на основании ориентационной информации.
[00303] Пример 44 включает в себя предмет Примера 43, причем в качестве варианта ориентационная информация показывает угол наклона устройства для захвата изображения.
[00304] Пример 45 включает в себя предмет любого из Примеров 37-44 и в качестве варианта включает в себя средство для определения межзрачкового расстояния на основании одного или более атрибутов устройства для захвата изображения.
[00305] Пример 46 включает в себя предмет Примера 45, причем в качестве варианта один или более атрибутов включают в себя по меньшей мере один атрибут, выбранный из группы, состоящей из эффективного фокусного расстояния (EFL) линзы устройства для захвата изображения, горизонтального поля обзора датчика устройства для захвата изображения, вертикального поля обзора датчика, разрешающей способности датчика и расстояния между двумя смежными пикселами датчика.
[00306] Пример 47 включает в себя предмет любого из Примеров 37-46 и в качестве варианта включает в себя средство для определения межзрачкового расстояния на основании параметра радиуса глаза и расстояния между устройством для захвата изображения и плоскостью, содержащей зрачки.
[00307] Пример 48 включает в себя предмет любого из Примеров 37-47, причем в качестве варианта межзрачковое расстояние включает в себя ближнее межзрачковое расстояние или дальнее межзрачковое расстояние.
[00308] Функции, этапы, компоненты и/или признаки, описанные в настоящей заявке со ссылкой на один или более вариантов реализации могут быть объединены или использованы в сочетании с одним или более другими функциями, этапами, компонентами и/или признаками, описанными в настоящей заявке со ссылкой на один или более другие варианты реализации, или наоборот.
[00309] Несмотря на то, что в настоящей заявке показаны и описаны конкретные признаки, специалисты в данной области техники могут осуществить различные модификации, замены, изменения и эквиваленты. Таким образом, следует понимать, что пункты приложенной формулы предназначены для охвата всех таких модификаций и изменений как находящихся в пределах принципа настоящего изобретения.
Реферат
Изобретение относится к медицинской технике. Продукт, выполненный с возможностью измерения межзрачкового расстояния между зрачками пользователя содержит один или более материальных компьютерочитаемых некратковременных носителей данных, содержащих исполняемые компьютером инструкции, выполненные с возможностью, при их исполнении по меньшей мере одним компьютерным процессором, обеспечивать выполнение указанным по меньшей мере одним компьютерным процессором этапов, включающих в себя обработку информации об изображении, захваченной датчиком устройства для захвата изображения, для определения на основе информации об изображении идентифицированных местоположений первого и второго отражений света источника света, причем идентификация местоположений первого и второго отражений содержит идентификацию местоположения первого отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы первого глаза пользователя, и идентификацию местоположения второго отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы второго глаза пользователя, определение оценочного расстояния, представляющего собой расстояние между датчиком и зрачками пользователя, когда информация об изображении захвачена датчиком, и определение межзрачкового расстояния на основании оценочного расстояния и идентифицированных местоположений указанных первого и второго отражений. Мобильное устройство, выполненное с возможностью измерения межзрачкового расстояния между зрачками пользователя содержит источник света, выполненный с возможностью генерации света для освещения зрачков пользователя, устройство для захвата изображения, содержащее датчик, выполненный с возможностью захвата информации об изображении, соответствующей зрачкам пользователя, и процессор, выполненный с возможностью идентификации на основании информации об изображении местоположений первого и второго отражений света источника света мобильного устройства, причем процессор выполнен с возможностью идентификации местоположения первого отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы первого глаза пользователя, и идентификации местоположения второго отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы второго глаза пользователя, причем процессор выполнен с возможностью определения оценочного расстояния, представляющего собой расстояние между датчиком и зрачками пользователя, когда информация об изображении захвачена датчиком, и с возможностью определения межзрачкового расстояния на основании оценочного расстояния и идентифицированных местоположений указанных первого и второго отражений. Способ измерения межзрачкового расстояния между зрачками пользователя включает обработку информации об изображении, захваченной датчиком устройства для захвата изображения, для определения на основе информации об изображении идентифицированных местоположений первого и второго отражений света источника света, причем идентификация местоположений первого и второго отражений содержит идентификацию местоположения первого отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы первого глаза пользователя, и идентификацию местоположения второго отражения путем идентификации первого образа Пуркинье отражения света источника света от наружной отражающей поверхности роговицы второго глаза пользователя, определение оценочного расстояния, представляющего собой расстояние между датчиком и зрачками пользователя, когда информация об изображении захвачена датчиком, и определение межзрачкового расстояния на основании оценочного расстояния и идентифицированных местоположений указанных первого и второго отражений. Вычислительное устройство, выполненное с возможностью обеспечения измерения межзрачкового расстояния между зрачками пользователя и содержащее по меньшей мере один процессор, выполненный с возможностью выполнения способа по любому из пп. 27-39. Технический результат заявленного изобретения состоит в увеличении точности определения межзрачкового расстояния. 4 н. и 36 з.п. ф-лы, 11 ил.
Комментарии