Способ и устройство для определения дефектов изготовления, сборки и установки магнитных систем - RU2431859C2
Код документа: RU2431859C2
Чертежи





Описание
Область техники, к которой относится изобретение
Изобретение относится к способу определения дефектов изготовления, сборки и установки магнитных систем, т.е. конструкций, содержащих токовые катушки или постоянные магниты и являющихся источниками магнитного поля. Изобретение может быть использовано при изготовлении и настройке электрофизической аппаратуры, однако его применение этим не ограничено.
Уровень техники
Существует большое число конструкций разной степени сложности, формирующих в окружающем пространстве магнитное поле, причем на формируемое магнитное поле могут накладываться определенные требования по конфигурации и ориентации в пространстве. Такие конструкции принято называть магнитными системами.
К качеству изготовления магнитных систем предъявляются весьма жесткие требования. При этом непосредственный контроль качества изготовления, сборки и установки элементов конструкций, как правило, затруднен в силу сложности доступа или размеров конструкций, то есть прямые методы, основанные на измерениях геометрических параметров системы, сложны или невозможны. С другой стороны, при сборке магнитной системы с использованием дефектных элементов даже при соблюдении геометрических параметров такая система будет создавать отличное от заданного магнитное поле. В то же время магнитные системы предназначены для формирования магнитного поля с заданными характеристиками, и для определения качества изготовления конструкции и работоспособности системы и ее элементов можно использовать информацию, основанную на распределении магнитного поля в окружающем пространстве.
Если магнитная система собрана правильно, то ее магнитное поле совпадает с расчетным значением; в противном случае магнитное поле будет отличаться от расчетного. Далее в тексте будет применяться термин «дефект» для указания конкретной ошибки, допущенной в ходе изготовления, сборки или установки рассматриваемой магнитной системы, превышающей предусмотренные технологические допуски.
Использование измерения магнитного поля для контроля качества известно из уровня техники. Например, для контроля отсутствия короткозамкнутых витков в круговой катушке постоянного тока можно использовать датчик магнитного поля, расположенный на оси катушки. Показания датчика пропорциональны числу витков катушки, и при коротком замыкании части витков показания датчика будут уменьшаться, причем по величине уменьшения сигнала датчика можно оценить количество короткозамкнутых витков (см. И.Е.Тамм. Основы теории электричества. М.: Наука, 1989).
Таким образом, известные системы на основании измеренного магнитного поля дают ответы на следующие вопросы: правильно ли собрана установка и работоспособны ли ее элементы; при этом получение информации о характере (типе), величине и локализации дефекта возможно лишь в простейших случаях.
Для большинства инженерных задач нужно знать информацию либо о характере (типе) дефекта, либо о величине и локализации дефекта. Положение дефекта часто необходимо определять в области, в общем случае полностью закрытой от визуального наблюдения.
Характерным примером магнитной системы является сверхпроводящий кабель, используемый в электромагнитных катушках в качестве элемента, участвующего в формировании магнитного поля. Структура кабеля представляет собой скрутку нескольких жил, состоящих из большого числа проводов, а при наличии неисправного проводника распределение поля вблизи дефектной жилы кабеля изменяется.
Другим примером магнитной системы могут служить сами электромагнитные катушки. Часто эти катушки имеют размеры несколько метров, массу десятки килограмм, но должны быть установлены с точностью до миллиметра. Дефектом здесь может быть не только ошибки намотки катушки, но и ошибки установки катушки в нужное положение. В идеале положение катушки должно быть привязано не к ее геометрическим размерам, а к распределению тока в катушке.
Еще одним примером магнитной системы может быть конструкция из постоянных магнитов, когда один из них установлен с ошибкой. Подобные системы применяются в качестве источников постоянного поля в системах слежения, см. патенты РФ 2197013 «Способ и следящая система для определения положения и ориентации подвижного объекта» и 2241958 «Способ и следящая система для определения положения и ориентации подвижного объекта».
Задача определения положения дефекта по данным измерений магнитного поля вне магнитной системы не может быть решена в общем виде. Например, зная, что ток расположен в бесконечном проводе цилиндрического сечения, радиуса цилиндра R, и зная, что точное распределение поля в пространстве обратно пропорционально расстоянию до оси цилиндра, нельзя определить распределение тока в этом цилиндрическом проводе, поскольку такое поле создается не только однородным полнотелым цилиндрическим проводом, но и любым проводом с цилиндрической симметрией, см. И.Е.Тамм. Основы теории электричества. М.: Наука, 1989. Все сказанное справедливо и по отношению к дефектам изготовления, сборки или установки конструкции.
Как правило, в любой рассматриваемой конструкции можно выделить некоторый набор технологических дефектов, возможных при изготовлении, сборке или установке. И эти «типовые технологические дефекты» можно математически описать с помощью набора параметров.
Так, к основным дефектам изготовления сверхпроводящего кабеля можно отнести нарушение проводимости в отдельно взятой жиле. Такая дефектная жила математически описывается положением ее центра в плоскости кабеля.
К основным дефектам изготовления электромагнитных катушек относятся их смещение и пространственный поворот относительно других элементов, а также деформации намотки. Математически они описываются вектором сдвига центра катушки, углами наклона и полуосями эллипса соответственно.
К основным дефектам системы постоянных магнитов относятся ошибки установки отдельных магнитов в заданное положение и разброс намагниченности. Математически они описываются вектором сдвига и вектором намагниченности.
Благодаря использованию способа и устройства в соответствии с указанным техническим решением определяется только правильность изготовления, сборки или установки конструкции. Недостатком известных способа и устройства является то, что дополнительная информация о характере дефекта или отсутствует, или носит качественный характер.
Раскрытие изобретения
Задачей настоящего изобретения является предложение способа и устройства для определения наличия, местоположения и параметров (т.е. количественных характеристик) дефектов магнитной системы путем исследования магнитного поля системы в окрестности магнитной системы. Дополнительной задачей изобретения является повышение точности определения параметров дефектов магнитной системы.
Задача настоящего изобретения решается с помощью способа определения дефектов магнитной системы, содержащего следующие шаги:
измеряют магнитное поле системы около магнитной системы с помощью, по меньшей мере, одного датчика магнитного поля;
формулируют, по меньшей мере, одно уравнение, связывающее измеренное магнитное поле с гипотетическим магнитным полем магнитной системы, имеющей один или более дефектов, выраженным в форме зависимости от одного или более параметров, описывающих указанные дефекты;
решают сформулированные уравнения с получением параметров, описывающих дефекты.
Гипотетическое магнитное поле магнитной системы может определяться на основе моделирования с использованием известных математических моделей магнитного поля, таких как закон Био-Савара-Лапласа, уравнения Максвелла, или других.
В предпочтительном варианте осуществления настоящего изобретения перед шагом измерений магнитного поля задают, по меньшей мере, один дефект магнитной системы и, по меньшей мере, один параметр, описывающий указанный дефект, осуществляют предварительное моделирование магнитного поля магнитной системы с одним или более дефектами и определяют точки измерения магнитного поля и/или ориентацию, по меньшей мере, одного датчика магнитного поля, а также количество измерений.
Считается, что для измеряемой магнитной системы заранее известен набор «типовых дефектов», под которыми здесь понимаются технологические ошибки изготовления, сборки и установки конкретной конструкции, а также неисправности системы и ее элементов, которые можно заранее спрогнозировать, при этом количество типов дефектов предполагается ограниченным некоторым списком в соответствии с конструкцией магнитной системы, технологией изготовления и сборки.
Предполагается, что измеренное поле есть суперпозиция поля от идеальной магнитной системы (т.е. конструкции, не содержащей дефектов) и от всех дефектов. Исходя из технологии изготовления и особенностей данной конструкции составляется список возможных дефектов и фиксируется набор подлежащих определению неизвестных параметров, характеризующих каждый тип дефекта (это может быть сделано заблаговременно, до осуществления измерений). В результате моделирования магнитного поля системы с дефектом для заданных дефектов определяют предполагаемое магнитное поле системы, имеющей дефекты.
Сформулированные уравнения образуют систему уравнений, при решении которой и определяются искомые параметры дефектов. При этом количество точек измерения, а значит, и число уравнений, составленных на основе измерений датчиков, предпочтительно должно быть не меньше, чем общее число независимых параметров, характеризующих определяемые дефекты.
Размеры и форма окрестности магнитной системы, т.е. области, в которой производятся магнитные измерения, предпочтительно определяются предварительным математическим моделированием упомянутых дефектов магнитной системы. Точки измерения магнитного поля, в которых размещаются датчики магнитного поля, или, в случае множества датчиков, оптимальное пространственное расположение датчиков магнитного поля в окрестности магнитной системы и/или ориентация, по меньшей мере, одного датчика магнитного поля могут определяться исходя из требований к точности определения параметров, описывающих дефекты. При определении точек измерения магнитного поля также может быть определены требуемая точность установки координат расположения и ориентации датчиков магнитного поля. Исходя из предварительного моделирования может быть задана требуемая измерительная точность датчика магнитного поля; в другом случае измерительная точность датчика магнитного поля может быть получена, например, как точность имеющихся в распоряжении датчиков, а для достижения необходимой точности определения параметров дефектов магнитной системы варьируются расположения точек измерения или датчиков.
Как видно из предыдущего абзаца, положение и ориентация датчиков, а также точность их установки могут быть заданы на основе предварительного моделирования. Однако даже в этом случае существует погрешность установки датчиков, и для определения фактического положения и ориентации датчиков в предпочтительном варианте при измерении магнитного поля около магнитной системы определяют положение и ориентацию, по меньшей мере, одного датчика измерения. В том случае, когда установка датчиков осуществляется приблизительно, например в пределах определенной области, определение положения и ориентации датчиков измерения магнитного поля во время выполнения измерений становится обязательным.
В одном из вариантов осуществления способ в соответствии с настоящим изобретением выполняется в магнитной системе, которая содержит, по меньшей мере, один проводник с током, причем в одном из вариантов этот проводник является кабелем. Указанный кабель может быть сверхпроводящим, в таком случае дефектом считается разрыв жилы кабеля, а параметрами, описывающими дефекты, являются координаты точки центра жилы, шаг намотки и длина бракованного участка (всего пять параметров).
В другом варианте осуществления способ в соответствии с настоящим изобретением выполняется в магнитной системе, которая содержит, по меньшей мере, одну электромагнитную катушку, причем в одном из случаев система состоит из одной электромагнитной катушки. В том случае, если электромагнитная катушка является круглой, то дефектами являются эллиптичность катушки и ее вертикально смещение относительно других элементов, входящих в систему или являющихся внешними по отношению к системе, а параметрами, описывающими дефекты, являются большая и малая полуоси эллипса и максимальное вертикальное искажение (всего три параметра). Если же электромагнитная катушка является катушкой тороидального поля токамака, то дефектами являются смещения N контрольных точек центральной линии катушки, причем параметрами, описывающими дефекты, являются смещения (Δx, Δy, Δz) каждой из N контрольных точек (всего 3N параметров)
В еще одном варианте осуществления способ в соответствии с настоящим изобретением выполняется в магнитной системе, которая содержит, по меньшей мере, один постоянный магнит, причем в одном из случаев система состоит из одного постоянного магнита. В этом варианте осуществления дефектом считается изменение магнитного момента эквивалентного точечного диполя, причем параметрами, описывающими дефекты, являются изменения (ΔMx, ΔMy, ΔMz) (всего по три параметра для каждого постоянного магнита).
Способ в соответствии с настоящим изобретением также может осуществляться в магнитной системе, которая содержит, по меньшей мере, два элемента, создающих магнитное поле, причем дефектами являются пространственный сдвиг и пространственный поворот, по меньшей мере, одного элемента относительно другого, а параметрами, описывающими дефекты, являются три координаты сдвига и три угла Эйлера пространственного поворота, т.е. всего шесть параметров. В этом случае ориентирование положения элементов магнитной системы осуществляется относительно друг друга.
В дополнительном варианте способ осуществляется в магнитной системе, содержащей, по меньшей мере, один элемент, создающий магнитное поле, причем дефектами являются пространственный сдвиг и пространственный поворот, по меньшей мере, одного элемента, создающего магнитное поле и входящего в магнитную систему, относительно, по меньшей мере, одного элемента, не входящего в магнитную систему, или относительно, по меньшей мере, одного элемента, входящего в магнитную систему, но не создающего магнитное поле, а параметрами, описывающими дефекты, являются три координаты сдвига и три угла Эйлера пространственного поворота. В таком варианте ориентирование элементов магнитной системы может осуществляться, например, относительно реперных элементов, не входящих в систему - например, относительно отметок, нанесенных на стенах здания, или относительно спутников, входящих в систему глобального позиционирования GPS. С другой стороны, элементы, относительно которых осуществляется ориентирование элементов магнитной системы, создающих полезное магнитное поле, могут быть штатным образом включены в состав магнитной системы, причем указанные элементы, предназначенные для ориентирования элементов магнитной системы, предпочтительно не создают собственное магнитное поле или же создают, но этим магнитным полем можно пренебречь в силу малости или же благодаря расположению, в котором указанное магнитное поле не оказывает влияние на полезное магнитное поле системы.
При осуществлении способа в соответствии с настоящим изобретением дополнительно может выполняться моделирование магнитного поля системы, не имеющей дефектов, причем при составлении указанной системы уравнений из измеренных значений магнитного поля системы вычитают значения магнитного поля, соответствующие магнитной системе, не имеющей дефектов.
В одном из вариантов осуществления изобретения при формулировании уравнений измеренное магнитное поле связывают с гипотетическим магнитным полем магнитной системы в точках измерения магнитного поля.
В другом варианте осуществления изобретения при формулировании уравнений гипотетическое магнитное поле магнитной системы связывают со значениями магнитного поля, полученными на основе измеренных значений магнитного поля, в точках, находящихся внутри области, заключающей в себя магнитную систему и на границе которой расположены точки измерения магнитного поля, причем значения магнитного поля, полученные на основе измеренных значений магнитного поля, получают в указанных точках внутри указанной области путем решения краевой задачи уравнения Лапласа.
В этом случае измерения магнитного поля с помощью датчиков осуществляют на границе одного или более замкнутых объемов (окрестности или области измерений), при этом положение упомянутых объемов и расположение датчиков определяется предварительным математическим моделированием, как это описано в патенте РФ 2271549 "Способ и устройство для определения карты магнитного поля в замкнутом объеме". Данные прямых измерений интерполируются на упомянутую границу области измерений для вычисления магнитного поля в точках границы. Данные интерполяции на границу области измерений используют как граничные данные для решения краевой задачи уравнения Лапласа, причем при составлении системы уравнений решают краевую задачу уравнения Лапласа, вычисляют значения магнитного поля во внутренних точках области и используют эти значения для составления системы уравнений. Благодаря тому что ошибка измерения поля датчиками, как разность двух гармонических функций (вычисленного и измеренного магнитного поля), сама является гармонической функцией, то по известному свойству гармонических функций ошибка максимальна на границе области. Тем самым уменьшается непосредственная ошибка измерений поля, связанная с шумами датчика, а также ошибками измерения координат датчиков.
В дополнительном варианте осуществления способа измерение магнитного поля магнитной системы, содержащей, по меньшей мере, один проводник с током, осуществляют при выключенном токе в магнитной системе, причем измеренные таким образом значения магнитного поля вычитают из значений магнитного поля, измеренных при включенном токе в магнитной системе, и используют полученные значения при составлении указанной системы уравнений. Такой вариант осуществления способа используется при наличии постоянного магнитного поля помех или при существенном влиянии магнитного поля Земли, или при наличии существенного дрейфа во времени показаний датчика.
В дополнительном варианте осуществления способа измерение магнитного поля магнитной системы, содержащей, по меньшей мере, один проводник с током, осуществляют также и при обратном токе в магнитной системе, причем значения магнитного поля системы определяют путем вычисления полуразности значений магнитных полей, создаваемых в магнитной системе прямым и обратным токами, и используют полученные значения при составлении указанной системы уравнений. Такой вариант осуществления способа также используется при наличии постоянного магнитного поля помех или при существенном влиянии магнитного поля Земли, или при наличии существенного дрейфа во времени показаний датчика.
Задача настоящего изобретения также решается с помощью устройства для определения дефектов магнитной системы или ее элементов, являющейся источником магнитного поля, которое содержит, по меньшей мере, один датчик для измерения значений компонент магнитного поля и средства обработки данных, использующие показания одного или более датчиков для определения дефектов магнитной системы, отличающегося тем, что определение дефектов осуществляется в соответствии с вышеописанным способом в любой из его модификаций.
В предпочтительном варианте выполнения устройства датчики установлены на подвижной рамке, охватывающей замкнутую область, причем устройство снабжено средствами приведения рамки в движение и средствами определения координат и ориентации датчиков.
Датчики магнитного поля предпочтительно являются однокомпонентными.
Способ и устройство согласно изобретению обеспечивают возможность определения наличия и параметров дефектов магнитной системы и устраняют основной недостаток в известных технических решениях - отсутствие количественной информации о дефектах. Кроме того, настоящее изобретение обеспечивает повышение точности определения параметров дефектов магнитной системы.
Благодаря способу и устройству определения дефектов магнитной системы обеспечивается возможность точного определения вида дефекта, его местоположения и размера, что позволяет устранять дефекты с меньшими затратами времени на локализацию дефекта и определение его величины, а также его устранение. Точное определение параметров дефектов снижает материальные потери и затраты при осуществлении устранения дефектов, поскольку местоположение и размер дефекта становятся известными до начала работ по устранению дефектов.
Краткое описание чертежей
На фиг.1 приведена структурная схема устройства определения дефектов.
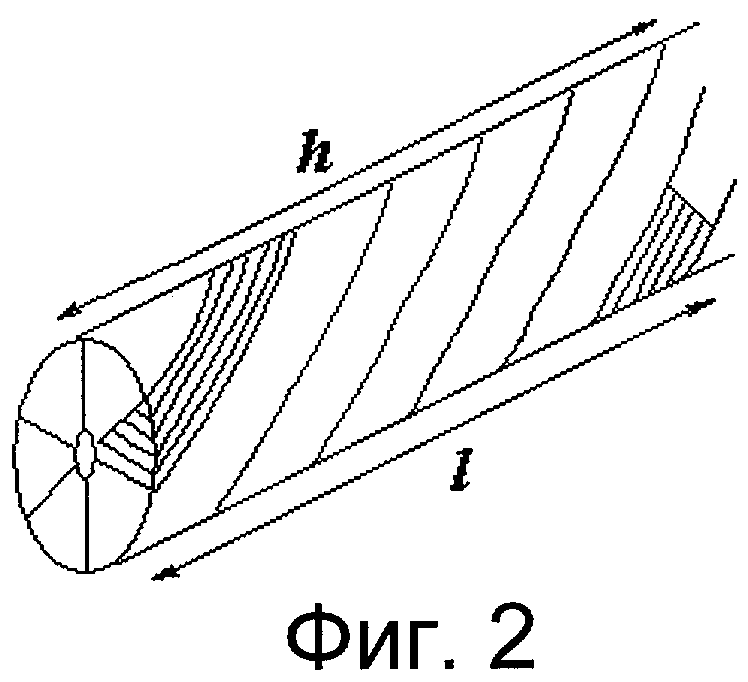
На фиг.2 показан общий вид сверхпроводящего кабеля.
На фиг.3 изображено сечение сверхпроводящего кабеля.
На фиг.4 показан общий вид полоидальной катушки токомака.
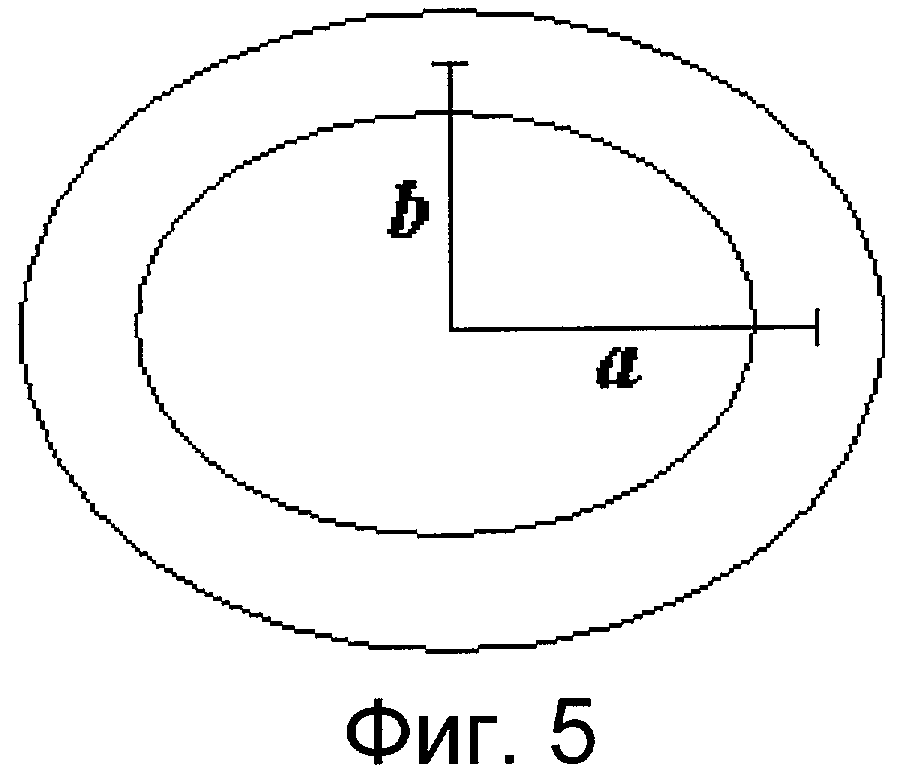
На фиг.5 показан вид эллиптического искажения полоидальной катушки.
На фиг.6 показан вид вертикального смещения полоидальной катушки.
На фиг.7 показан общий вид тороидальной катушки токомака.
На фиг.8 показан вид тороидальной катушки с искажениями.
На фиг.9 показана система постоянных магнитов, создающих эталонное магнитное поле в авиационной следящей системе.
Осуществление изобретения
На фиг.1 приведена структурная схема устройства определении дефектов. Примеры устройств и типовых дефектов приведены на фиг.2-4.
Устройство содержит рамку 4, по меньшей мере, с одним датчиком 1 магнитного поля, средства для приема сигналов датчиков и передачи этих сигналов на средства сбора и обработки данных 2, оснащенные блоком памяти и вычислительным блоком (компьютер 3) для хранения данных измерений. В предпочтительном варианте выполнения устройства датчики 1 установлены на подвижной рамке, охватывающей замкнутую область, причем устройство снабжено средствами 5 приведения рамки в движение и средствами определения координат и ориентации датчиков. Вычислительный блок может быть совмещен с компьютером 3, управляющим измерениями, но предпочтительнее иметь отдельный более мощный компьютер 6. Вычислительный блок предназначен для хранения базы данных карты магнитного поля, производимого «типовыми дефектами» электромагнитной конструкции. Вычислительный блок определяет параметры, используемые для описания «типовых дефектов», решая систему алгебраических уравнений (см. ниже).
Количество однокомпонентных датчиков определяется предварительным математическим моделированием. Однокомпонентные датчики магнитного поля хорошо известны из уровня техники, см. М.Л.Бараночников. Микромагнитоэлектроника, т.1-2. М.: ДМК-Пресс, 2001.
Средства передачи сигналов датчиков в компьютер 3 выполнены в виде печатной платы со встроенным микроконтроллером, синхронизирующим работу преобразователя аналоговых сигналов датчиков в цифровую форму. Компьютер оснащен блоком памяти, например постоянным запоминающим устройством, для хранения координат датчиков магнитного поля.
Для определения дефектов магнитной системы с помощью описанного устройства с помощью, по меньшей мере, одного датчика магнитного поля измеряют магнитное поле системы около магнитной системы. Далее в средствах сбора и обработки информации составляют (записывают), по меньшей мере, одно уравнение, связывающее измеренное магнитное поле с гипотетическим магнитным полем магнитной системы, имеющей один или более дефектов, выраженным в форме зависимости от одного или более параметров, описывающих указанные дефекты, после чего решают сформулированные уравнения с получением параметров, описывающих дефекты.
Количество измерений, местоположение и/или ориентацию датчиков, измеряющих магнитное поле, могут определять произвольным образом, однако в предпочтительном варианте перед шагом измерений магнитного поля задают, по меньшей мере, один дефект магнитной системы и, по меньшей мере, один параметр, описывающий указанный дефект, осуществляют предварительное моделирование магнитного поля магнитной системы с одним или более дефектами и определяют точки измерения магнитного поля и/или ориентацию, по меньшей мере, одного датчика магнитного поля, а также количество измерений.
Далее описывается предпочтительный алгоритм определения параметров «типовых дефектов», в соответствии с которым осуществляется предварительное моделирование магнитного поля магнитной системы.
Пусть весь список из N параметров, описывающих типовые дефекты конкретной установки, будет представлен в дальнейшем как обобщенный вектор

Считается, что никакие другие дефекты магнитной системы согласно технологии изготовления невозможны, т.е. этот вектор полностью определяет все «типовые дефекты». На фиг.2-4 представлены примеры таких параметров.
Для обеспечения возможности определения параметров (1) число измерений поля, осуществляемых в К точках вблизи заданной установки, (число уравнений) должно быть не меньше числа параметров (1), т.е. K≥N. Измерения предпочтительно производятся однокомпонентными датчиками. По этим данным можно определить параметры (1), например, описываемым далее способом.
Датчик магнитного поля измеряет компоненту вектора магнитного поля, направленную вдоль магнитной оси датчика:

где bk - компонента поля, измеренная k-м датчиком,


В выражение (2) входят два вектора:


Методы определения единичного вектора направления магнитной оси датчика хорошо известны из уровня техники (Ю.В.Афанасьев, Н.В.Студенцов, А.П.Щепкин. Магнитометрические преобразователи, приборы, установки. М.: Энергия, 1972). Они основаны на вращении датчика в известном калибровочном поле, например в магнитном поле Земли.
Вектор магнитного поля

Вычисление вектора магнитной индукции, производимого токовыми катушками или постоянными магнитами, хорошо известно из уровня техники (см. И.Е.Тамм. Основы теории электричества. М.: Наука, 1989; Э.Парселл. Электричество и магнетизм). Следует отметить, что в литературных источниках обычно предполагается, что положение источников магнитного поля точно известно, в то время как в рассматриваемом случае источники магнитного поля зависят от параметров (1). Тем не менее, если придать какие-то (произвольные) значения параметрам (1), вектор магнитного поля может быть в принципе вычислен по известным из литературы формулам.
Итак, вычисленный вектор магнитной индукции в k-й точке зависит от набора параметров (1):

Если обозначить через fk скалярное произведение в правой части формулы (2), можно записать для этой функции выражение

также зависящее от всех параметров (1).
Рассчитанное магнитное поле (4), как функция N неизвестных величин (1), должно равняться значению магнитного поля bk, измеряемому датчиком, что задает систему из К≥N нелинейных алгебраических уравнений.

где k=1…K
Система К уравнений (5) от переменных (1) решается, например, путем поиска минимума функционала невязки F.

где

Минимизация функционала (6) может быть осуществлена с использованием итерационной процедуры, например, обобщенным методом Ньютона (см. Б.П.Демидович, И.А.Марон. Основы вычислительной математики. М.: Наука, 1970). Для этого приравнивают нулю все N частных производных ∂F/∂xi функционала (6) по переменным (1), что приводит к системе линейных уравнений с положительно определенной матрицей размерности N*N:

где


Линейная система (7) относительно N приращений

Пусть

Для корректного решения системы (5) необходим минимум N уравнений, но для повышения точности и достоверности решения предпочтительно использовать избыточное количество уравнений.
Раскрытый способ определения наличия, местоположения и параметров дефектов может выполняться в магнитной системе, которая содержит, по меньшей мере, один проводник с током, причем в одном из вариантов этот проводник является кабелем. Указанный кабель может быть сверхпроводящим, в таком случае дефектом считается разрыв жилы кабеля, а параметрами, описывающими дефекты, являются координаты точки центра жилы, шаг намотки и длина бракованного участка (всего пять параметров). На фиг.2 показан общий вид сверхпроводящего кабеля, являющегося скруткой нескольких (например, восьми) жил. Типовым дефектом может являться нарушение проводимости в жиле (на фиг.2 такая жила заштрихована). Параметрами дефекта являются шаг намотки h, длина бракованного участка l и координаты центра жилы (x, y), показанные на фиг.3.
Раскрытый способ также может выполняться в магнитной системе, которая содержит, по меньшей мере, одну электромагнитную катушку, причем в одном из случаев система состоит из одной электромагнитной катушки. В том случае, если электромагнитная катушка является круглой, то дефектами являются эллиптичность катушки и ее вертикально смещение, а параметрами, описывающими дефекты, являются большая и малая полуоси эллипса и максимальное вертикальное искажение (всего три параметра). Такая катушка показана на фиг.4, причем на фиг.5 показано эллиптичное искажение катушки с полуосями эллипса а и b, а на фиг.6 показано вертикальное искажение катушки величиной γ.
Электромагнитная катушка может представлять собой катушку тороидального поля токамака, в таком случае дефектами являются смещения N контрольных точек центральной линии катушки, причем параметрами, описывающими дефекты, являются смещения (Δx, Δy, Δz) каждой из N контрольных точек (всего 3N параметров). На фиг.7 показан общий вид тороидальной катушки токомака, а на фиг.8 показаны типовые дефекты изготовления, связанные с искажением центральной токовой линии катушки. Центральная линия тока катушки может быть описана сплайном, проходящим через несколько контролируемых референсных точек, на фиг.8 показан вариант с шестью точками A-F. Параметрами дефекта являются смещения референсных точек, т.е. ΔxA, ΔyA, ΔzA, ΔxB, ΔyB, ΔzB, …, ΔxF, ΔyF, ΔzF.
Описанный способ может выполняться также и в магнитной системе, которая содержит, по меньшей мере, один постоянный магнит, причем в одном из случаев система состоит из одного постоянного магнита. В этом варианте осуществления дефектом считается изменение магнитного момента эквивалентного точечного диполя, причем параметрами, описывающими дефекты, являются изменения (ΔMx, ΔMy, ΔMz) (всего по три параметра для каждого постоянного магнита).
Кроме того, способ в соответствии с настоящим изобретением также может осуществляться в магнитной системе, которая содержит, по меньшей мере, два элемента, создающих магнитное поле, причем дефектами являются пространственный сдвиг и пространственный поворот, по меньшей мере, одного элемента относительно другого, а параметрами, описывающими дефекты, являются три координаты сдвига и три угла Эйлера пространственного поворота, т.е. всего шесть параметров. В этом случае ориентирование положения элементов магнитной системы осуществляется относительно друг друга.
В качестве примера такой магнитной системы может быть приведен источник магнитного поля в авиационной системе слежения, состоящий из нескольких (например, четырех) постоянных магнитов, изображенный на фиг.9. Каждый магнит определяется магнитным моментом М эквивалентного диполя. Дефектом изготовления считается изменение магнитного момента (ΔMx, ΔMy, ΔMz) одного или более магнитов. На фиг.9 показан случай, когда один из четырех магнитов отклонен от вертикального положения, предполагаемого при установке.
В одном из вариантов способ осуществляется в магнитной системе содержащей, по меньшей мере, один элемент, создающий магнитное поле, причем дефектами являются пространственный сдвиг и пространственный поворот, по меньшей мере, одного элемента, создающего магнитное поле и входящего в магнитную систему, относительно, по меньшей мере, одного элемента, не входящего в магнитную систему, или относительно, по меньшей мере, одного элемента, входящего в магнитную систему, но не создающего магнитное поле, а параметрами, описывающими дефекты, являются три координаты сдвига и три угла Эйлера пространственного поворота.
При осуществлении способа в соответствии с настоящим изобретением дополнительно может выполняться моделирование магнитного поля системы, не имеющей дефектов, причем при составлении указанной системы уравнений из измеренных значений магнитного поля системы вычитают значения магнитного поля, соответствующие магнитной системе, не имеющей дефектов.
В одном из вариантов осуществления изобретения при формулировании уравнений измеренное магнитное поле связывают с гипотетическим магнитным полем магнитной системы в точках измерения магнитного поля. Однако для более точного определения местоположения и параметров дефектов при формулировании уравнений гипотетическое магнитное поле магнитной системы предпочтительно связывают со значениями магнитного поля, полученными на основе измеренных значений магнитного поля, в точках, находящихся внутри области, заключающей в себя магнитную систему и на границе которой расположены точки измерения магнитного поля, причем значения магнитного поля, полученные на основе измеренных значений магнитного поля, получают в указанных точках внутри указанной области путем решения краевой задачи уравнения Лапласа.
В том случае, если магнитная система содержит, по меньшей мере, один проводник с током, для повышения точности определения местоположения и параметров дефектов измерение магнитного поля магнитной системы осуществляют при выключенном токе в магнитной системе, причем измеренные таким образом значения магнитного поля вычитают из значений магнитного поля, измеренных при включенном токе в магнитной системе, и используют полученные значения при составлении указанной системы уравнений. В подобном случае также может использоваться и другой способ повышения точности определения местоположения и параметров дефектов, в соответствии с которым измерение магнитного поля магнитной системы, содержащей, по меньшей мере, один проводник с током, осуществляют также и при обратном токе в магнитной системе, причем значения магнитного поля системы определяют путем вычисления полуразности значений магнитных полей, создаваемых в магнитной системе прямым и обратным токами, и используют полученные значения при составлении указанной системы уравнений.
Раскрываемые в соответствии с настоящим изобретением устройство и способ для определения дефектов магнитных систем позволяют определять наличие или отсутствие дефектов, а в случае наличия дефектов дают возможность определения параметров и местоположения дефектов. Кроме того, отдельные раскрытые аспекты изобретения позволяют также повысить точность определения параметров и местоположения дефектов магнитной системы в случае наличия таковых.
Благодаря предложенным способу и устройству для определения дефектов магнитных систем могут быть снижены временные затраты на поиск дефектов, а также могут быть определены параметры и местоположение дефектов, что позволяет устранять обнаруженные дефекты с меньшими материальными и трудовыми затратами, что, в свою очередь, положительно скажется на стоимости монтажных работ и работ по техническому обслуживанию магнитных систем, а также на снижении затрат на заменяемые элементы, поскольку точное определение местоположения и параметров дефектов магнитной системы обеспечивает возможность устранения дефектов путем замены минимально необходимого объема элементов, создающих магнитное поле, в окрестности обнаруженного дефекта. Кроме того, определение наличия, местоположения и параметров дефектов таких элементов магнитных систем, как сверхпроводящий кабель, который сам по себе является сложной магнитной системой, позволяют производить выбраковку дефектных элементов тороидального токомака перед монтажом или на стадии монтажа, что также снижает затраты на устранение дефектов.
Реферат
Настоящее изобретение касается способа определения характерных («типовых») дефектов магнитных систем. Заявленный способ включает измерение магнитного поля вокруг конструкции, являющейся источником магнитного поля, определение отклонения измеренного поля в указанных точках от расчетного («идеального»). При этом формируют, по меньшей мере, одно уравнение, связывающее измеренное магнитное поле с гипотетическим магнитным полем магнитной системы, имеющей один или более дефектов, выраженным в форме зависимости от одного или более параметров, описывающих указанные дефекты, после чего решают сформулированные уравнения с получением параметров, описывающих дефекты. Также предложено устройство для реализации указанного способа, содержащее, по меньшей мере, один датчик для измерения значений компонент магнитного поля и средства обработки данных, использующие показания одного или более датчиков для определения дефектов магнитной системы. Технический результат - получение информации о характере и локализации дефекта, а также снижение временных затрат на его поиск. 2 н. и 18 з.п. ф-лы, 9 ил.
Формула
измеряют магнитное поле системы около магнитной системы с помощью, по меньшей мере, одного датчика магнитного поля;
формулируют, по меньшей мере, одно уравнение, связывающее измеренное магнитное поле с гипотетическим магнитным полем магнитной системы, имеющей один или более дефектов, выраженным в форме зависимости от одного или более параметров, описывающих указанные дефекты;
решают сформулированные уравнения с получением параметров, описывающих дефекты.
Комментарии