Магнитометр с термокомпенсацией сигнала датчика магнитного поля - RU2707586C1
Код документа: RU2707586C1
Чертежи
Описание
Область техники
Изобретение относится к области магнитных измерений. В частности, к области измерений индукции магнитного поля с помощью магнитометра, например, феррозондового типа.
Уровень техники
Известен цифровой феррозондовый магнитометр [1], включающий в себя формирователь синусоиды, выход которого соединен с входами феррозондов, выходы которых соединены с входами избирательных усилителей, выходы которых соединены с первыми входами устройств выборки-хранения, выходы которых соединены с первыми входами аналого-цифровых преобразователей, вторые входы которых соединены с третьим выходом логического блока управления, второй выход которого соединен с вторыми входами устройств выборки-хранения, первый выход соединен с входом формирователя синусоиды, а вход соединен с выходом задающего генератора.
Недостатком данного магнитометра является увеличение погрешности измерения магнитного поля вследствие изменения температуры феррозонда.
Известен цифровой феррозондовый магнитометр [2], который наиболее близок по технической сущности к предлагаемому устройству. В качестве прототипа выбран один канал устройства: магнитометр без коррекции температурной погрешности феррозонда с исключением аналого-цифрового преобразователя (АЦП) и измеритель отклонения температуры от нормальной. Кроме того, согласно теории технического эквивалента суммирование сигнала измерителя отклонения температуры с основным сигналом магнитометра, осуществляемое в прототипе по второму входу суммирования устройства выборки-хранения, заменено отдельным сумматором на выходе указанного выше магнитометра [2]. Измеритель отклонения температуры от нормальной в прототипе представляет последовательно соединенные датчик температуры и схему температурной компенсации, где в качестве датчика температуры используются последовательно соединенные входная обмотка феррозонда и измерительный резистор. В качестве датчика температуры могут быть использованы и иные средства, например, терморезистор, микросхема измерителя температуры и прочее. Таким образом, структура избранного прототипа представляет последовательно соединенные магнитометр без температурной коррекции погрешности феррозонда, сумматор и выходную шину. Второй вход сумматора соединен с выходом измерителя отклонения температуры от нормальной.
Недостатком данного устройства является низкая точность компенсации температурной погрешности феррозонда, что обусловлено одной цепью коррекции посредством сумматора. Одной цепью коррекции невозможно оптимально скомпенсировать имеющие место согласно работе [3] две основные составляющие температурной погрешности феррозонда - аддитивную и мультипликативную. Аналогичные погрешности имеют место и для датчиков магнитного поля (ДМП) иного типа.
Целью предполагаемого изобретения является повышение точности коррекции температурной погрешности датчика магнитного поля, например, феррозонда магнитометра.
Сущность изобретения
В предлагаемом устройстве для достижения поставленной цели введена коррекция мультипликативной составляющей температурной погрешности ДМП на втором этапе с помощью умножителя выходного сигнала. При этом изменены условия регулировки первой ступени коррекции, а именно - при индукции ВМП=0 измеряемого магнитного поля.
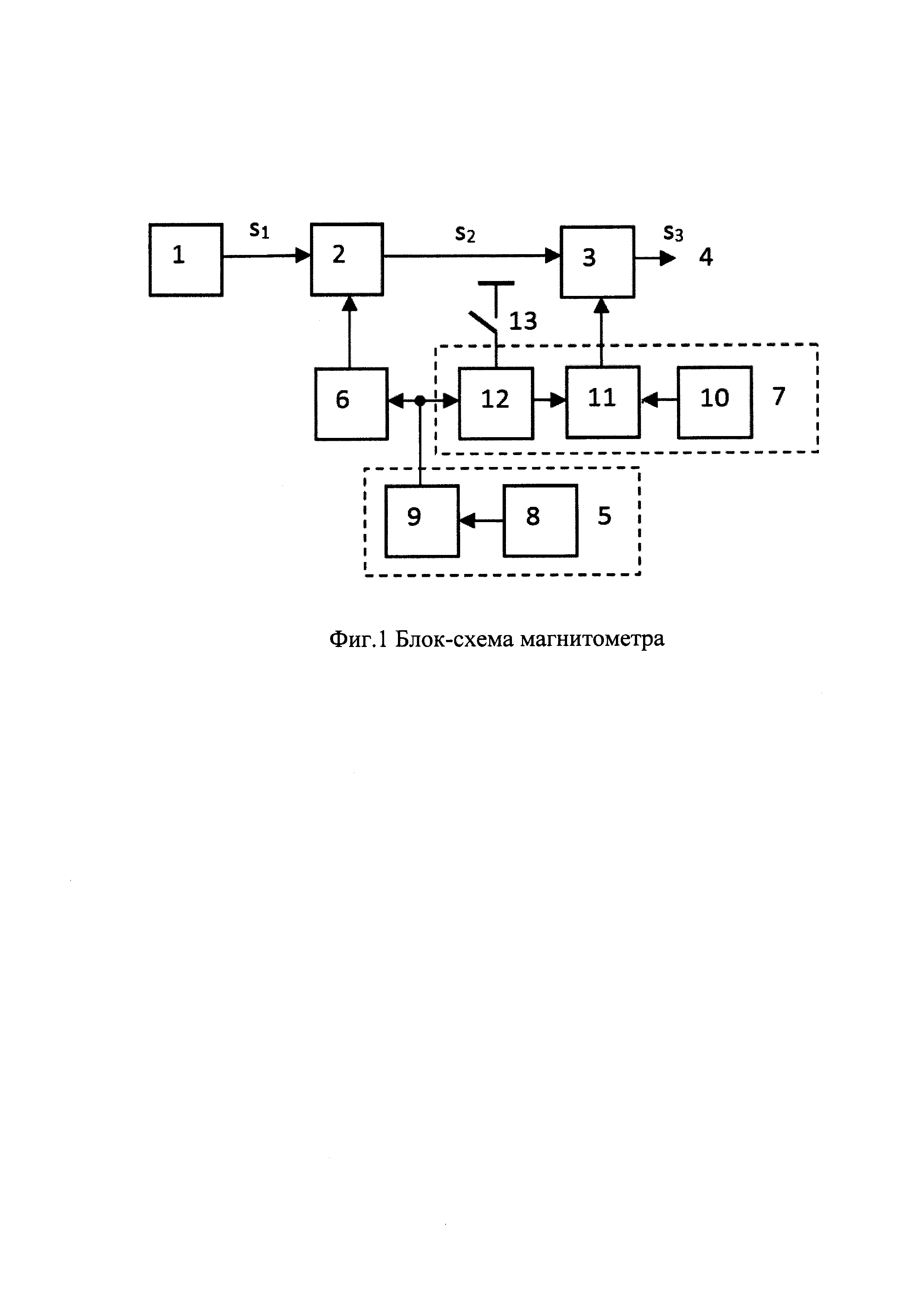
Устройство иллюстрируется блок-схемой магнитометра (фиг. 1), где магнитометр 1 без коррекции температурной погрешности ДМП последовательно соединен с сумматором 2, умножителем 3 и выходной шиной 4. Выход измерителя 5 отклонения температуры от нормальной соединен через первый регулятор 6 со вторым входом сумматора 2 и через формирователь 7 сигнала коррекции мультипликативной температурной погрешности ДМП с вторым входом умножителя 3. Измеритель 5 отклонения температуры от нормальной содержит последовательно соединенные датчик температуры 8 и формирователь 9 сигнала температурной компенсации. Выход формирователя 9 сигнала температурной компенсации является выходом измерителя 5 отклонения температуры от нормальной. Формирователь 7 сигнала коррекции мультипликативной температурной погрешности ДМП содержит последовательно соединенные источник опорного напряжения 10 и сумматор 11, второй вход которого соединен через регулятор 12 с выходом измерителя 5 отклонения температуры от нормальной. Выход сумматора 11 является выходом формирователя 7. Переключатель 13 включен между входом управления формирователя 7 сигнала коррекции мультипликативной температурной погрешности и общей шиной. Вход управления формирователя 7 сигнала коррекции мультипликативной температурной погрешности соединен с входом управления регулятора 12.
Работа устройства осуществляется следующим образом. Выходной сигнал S1 магнитометра 1 без коррекции температурной погрешности ДМП (соответственно сигналы S2 и S3 устройства) может быть представлен как постоянным напряжением, так и цифровым кодом. Для определенности далее рассмотрен вариант сигналов S1, S2 и S3 в виде постоянных напряжений. При этом сигнал S1 содержит аддитивную и мультипликативную составляющие температурной погрешности ДМП, входящего в состав магнитометра 1. Сигнал S2 содержит мультипликативную составляющую температурной погрешности ДМП. Сигнал S3 представляет скорректированный по температурной погрешности ДМП результат измерения индукции ВМП. Исходное положение переключателя 13 - разомкнутое. Замкнутое положение переключателя 13 рассмотрено отдельно - для случая интегрального исполнения сумматоров 2, 11 и умножителя 3 на одном кристалле микросхемы.
Измеритель 5 отклонения температуры от нормальной формирует сигнал:
UT=КТ⋅ΔТ,
где КТ - коэффициент преобразования измерителя 5;
ΔT=ТНКУ-ТР;
ТНКУ=20°С (температура нормальных климатических условий - НКУ);
ТР = температура окружающей среды (ТОС) ДМП.
ДМП, например, феррозонд и электронная часть магнитометра (ЭЧМ) 1 в общем случае могут иметь различную ТОС. При этом ДМП часто подвержен большему воздействию температуры, чем ЭЧМ. Например, измерения ВМП с расположением ДМП - феррозонда в открытом космическом пространстве, а ЭЧМ на термостабилизированной платформе. Поэтому в качестве Тp в соответствии с целью предполагаемого изобретения принята температура ТОС ДМП в непосредственной близости от которого расположен датчик температуры 8. Температурная погрешность ЭЧМ может быть устранена известными средствами компенсации электронных устройств. Поэтому в соответствии с целью предполагаемого изобретения температурная погрешность ЭЧМ принята равной нулю. Кроме того, полагается, что в ЭЧМ осуществлена коррекция конструктивных погрешностей ДМП в НКУ.
Измеритель 5 отклонения температуры в частном случае может быть реализован согласно его описанию в прототипе [2]. Регуляторы 6 и 12 имеют, например, линейные функции передачи:

Величины коэффициентов К6 и К12 устанавливают при регулировке устройства. При Тр=ТНКУ имеем UT=0 и на выходе сумматора 2 формируется сигнал US2(НКУ)=US1(НКУ) магнитометра 1. ЭЧМ магнитометра 1 настроен таким образом, что его выходное напряжение US1(ВМП=0, Тр=ТНКУ)=0, тем самым компенсируется конструктивное смещение нуля ДМП (феррозонда). При изменении температуры в ту или другую сторону от температуры НКУ на выходе формирователя 9 появляется положительное или отрицательное напряжение ±ΔUT.
Коэффициент К6 регулятора 6 устанавливают при индукции эталона магнитного поля ВМП=0 и максимальной по модулю температуре Тр ДМП, сравнивая значения

Умножитель 3 реализует функцию





Обеспечение требуемой функциональной зависимости

Практическая реализация устройства по теории технического эквивалента в части сумматоров 2, 11 и умножителя 3 может быть осуществлена на одной микросхеме (ИМС) AD633. Данная ИМС - вычитающий умножитель, где входы X1 для US1 и Х2 для

Линейная зависимость температурной погрешности феррозонда установлена в работе [4]. При необходимости в измеритель 5 отклонения температуры от нормальной и формирователь 7 сигнала коррекции мультипликативной температурной погрешности могут быть введены дополнительно соответствующие функциональные преобразователи.
Предполагаемое изобретение, обеспечивающее термокомпенсацию сигнала датчика магнитного поля, обладая новизной, полезностью и реализуемостью, может найти широкое применение в технике магнитных измерений, в частности, при реализации устройства в виде изделия типа система на кристалле.
Литература
1. Цифровой феррозондовый магнитометр. Патент РФ №2316781, МПК G01R 33/02, 2008 г.
2. Цифровой феррозондовый магнитометр. Патент РФ №2380718, МПК G01R 33/02, 2008 г.
3. Афанасьев Ю. Феррозонды. - Л.: Энергоатомиздат, 1986.
4. Рыжков И. Улучшение технических характеристик феррозондовых датчиков для автоматизированных систем управления ориентацией объектов: диссертация на соискание степени кандидата технических наук / Приднепровская государственная академия строительства и архитектуры. Днепропетровск - 2005.
Реферат
Изобретение относится к области измерений индукции магнитного поля с помощью магнитометра, например, феррозондового типа. Сущность изобретения заключается в преобразовании индукции магнитного поля Вв цифровой или аналоговый сигнал S(В) с последующей компенсацией температурной погрешности первичного датчика. Предлагается двухэтапная компенсация результата измерений: S(В, ΔТ)=S(В, ΔT)+ΔS(В=0, ΔT) - результат компенсации первого этапа, S(В)=S⋅К(ΔT) - результат компенсации второго этапа (конечный), где ΔT - отклонение температуры от нормальной, К- коэффициент умножения. За нормальную температуру принято значение 20°С. При этом рассматривается температурная погрешность магнитометра, которая определяется температурной зависимостью параметров первичного датчика, например, феррозонда. Первый этап - компенсация аддитивной составляющей температурной погрешности. Второй этап - компенсация мультипликативной составляющей температурной погрешности. Реализация первого этапа состоит в измерении отклонения температуры (феррозонда) от температуры нормальных климатических условий в единицах измерения сигнала Sи суммировании результата этого измерения с определенным весовым коэффициентом, определяемым на этапе регулировки, с выходным сигналом S(В, ΔT) магнитометра. Реализация второго этапа состоит в умножении скорректированного сигнала первого этапа на коэффициент К, знак которого не изменяется, а величина пропорциональна отклонению температуры ΔT от нормальной. Технический результат - повышение точности температурной коррекции погрешности первичного датчика магнитометра. 2 з.п. ф-лы, 1 ил.
Комментарии