Устройство, способ и программа управления для проведения офтальмологической, в частности рефракционной, лазерной хирургической операции - RU2481810C2
Код документа: RU2481810C2
Чертежи
Описание
Область техники
Изобретение относится к офтальмологической, в частности рефракционной, лазерной хирургии.
Уровень техники
В контексте изобретения под рефракционной лазерной хирургией понимается изменение изображающих свойств оптической системы глаза посредством лазерного излучения. Взаимодействие падающего лазерного излучения с глазом изменяет рефракционные свойства одного или более компонентов глаза. Поскольку изображающие свойства глаза определяются, в основном, роговицей, во многих случаях рефракционная лазерная хирургия глаза предусматривает воздействие на роговицу. В процессе такого воздействия путем выполнения соответствующего разреза и/или соответствующего удаления (иссечения) материала обеспечивается изменение профиля роговицы (используется также термин "профилирование роговицы").
Важным примером профилирования роговицы с целью изменения ее рефракционных свойств является метод LASIK (laser in-situ keratomileusis - лазерный интрастромальный кератомилез). В методе LASIK сначала срезают небольшой поверхностный участок роговицы (который обычно специалисты именуют лоскутом). Лоскут остается присоединенным частью своего края к примыкающей роговичной ткани, так что он легко может быть отогнут, а затем снова возвращен на свое место. На практике преимущественно используются два способа формирования лоскута. Одним из них является механический способ с применением микрокератома, а второй - лазерный способ, в котором посредством фемтосекундного лазерного излучения (т.е. импульсного лазерного излучения с длительностью импульсов в фемтосекундном диапазоне) производят плоский подповерхностный разрез в роговице. Этот разрез выводится наружу, на поверхность роговицы в зоне, удаленной от места соединения лоскута с роговицей. После отгибания сформированного лоскута производят удаление материала (абляцию) открытой таким способом стромы в соответствии с заданным профилем абляции. Данный профиль определяет, какое количество ткани должно быть удалено в соответствующем месте роговицы. Профиль абляции рассчитывают таким образом, чтобы по завершении абляции роговица имела оптимальную форму для прооперированного глаза, т.е. чтобы, насколько это возможно, были скорректированы ранее существовавшие дефекты изображающих свойств глаза. Соответствующие способы расчета профиля абляции доступны для специалистов в течение длительного времени.
Для абляции используют, например, эксимерный лазер, излучающий в ультрафиолетовом (УФ) диапазоне, например 193 нм.
После того как профиль абляции для оперируемого глаза будет рассчитан, определяют, как наиболее эффективно можно произвести требуемое удаление ткани с помощью используемого лазерного излучения. Это излучение, как правило, является импульсным. Следовательно, необходимо рассчитать, с привязкой к координатам и времени, последовательность лазерных импульсов, которая, при взаимодействии с роговицей, в частности стромой, приведет к требуемому профилированию роговицы.
Из уровня техники известны средства позиционирования пучка, пригодные для осуществления перемещения лазерного пучка по оперируемому глазу с формированием пространственно-временной последовательности лазерных импульсов. Такие средства могут, в частности, содержать блок отклонения излучения (известный также как сканер), способный отклонять лазерный пучок в поперечных направлениях (x-y), а также фокусирующую оптику для фокусирования лазерного пучка на требуемой высоте (z). Блок отклонения излучения может содержать, например, одно или более отклоняющих зеркал с гальванометрическим управлением.
Изобретение не ограничивается методом LASIK, а может применяться и в других лазерных хирургических операциях на глазе, например в фоторефракционной кератомии (photorefractive keratectomy, PRK), в методах LASEK (лазерный эпикератомилез, Laser Epitheliale Keratomileusis) и EPI-LASIK (субэпителиальный лазерный кератомилез), или при различных процедурах, при которых в роговице выполняются только разрезы. При этом изобретение вообще не ограничено лазерной хирургией роговицы: оно может быть применено, например, и при операции на хрусталике.
Вышеупомянутые средства позиционирования пучка управляются посредством программно управляемого компьютера, в соответствии с профилем абляции или, в более общем случае, в соответствии с профилем воздействия. Если воздействие не является абляционным хирургическим воздействием, профиль воздействия может соответствовать, например, профилю разреза, который определяет, в каком месте и насколько глубоким следует производить разрез.
Профиль воздействия требует наличия опорной точки, к которой привязана последовательность лазерных точек. Было предложено, в частности, применительно к абляции в рамках LASIK использовать в качестве опорной точки для профиля абляции среднюю точку (центр) зрачка. Зрачок - это отверстие, окруженное радужной оболочкой (радужкой), через которое излучение проходит внутрь глаза и падает на сетчатку. Зрачок имеет относительно резкий контур и поэтому пригоден для фотографирования посредством камеры и оценивания с помощью программ обработки изображения. Соответствующие технологии применения камеры и программы обработки известны из уровня техники.
Однако человеческий глаз не является стационарным (статичным) объектом, поскольку постоянно совершает движения. Существуют различные типы движений глаза, некоторые из которых имеют варьирующие временные шкалы. При этом важно, что глаз никогда не находится в покое. Это справедливо и тогда, когда взгляд стремится зафиксироваться на определенном объекте: даже в этом случае имеют место неизбежные движения фиксации. Поскольку зрачок в большей или меньшей степени участвует в вышеупомянутых движениях глаза, движения глаза можно отслеживать, осуществляя наблюдение (или мониторинг) зрачка посредством камеры. Соответствующее устройство слежения за глазом ("eye-tracker") отслеживает движения глаза формированием последовательностей изображений зрачка (включая окружающую его радужку) с последующим оцениванием (анализом) этих последовательностей с помощью соответствующих программ. В контексте анализа изображения определяется, прежде всего, мгновенное положение центра зрачка. Поскольку центр абляции (центр профиля абляции) всегда подстраивается под центр зрачка, определенный по описанной технологии, требуемая пространственная последовательность лазерных импульсов может надежно подаваться в нужные точки в оперируемой области глаза.
Вместе с тем, применению центра зрачка в качестве опорной точки для профиля абляции свойственна систематическая погрешность, поскольку оно не учитывает глубину передней камеры глаза, находящейся перед зрачком, а также толщину роговицы. Движения глаз преимущественно являются вращательными, с центром вращения внутри стекловидного тела. Если глаз поворачивается на определенный угол, центр зрачка смещается в плоскости зрачка на одну величину, тогда как точка, находящаяся на поверхности роговицы, смещается в плоскости роговицы на вторую величину, превышающую первую. Это связано с тем, что расстояние от точки на роговице до центра вращения больше расстояния между центром зрачка и центром вращения. Поэтому движения глаза приводят к погрешностям профиля абляции, привязанного к центру зрачка.
В связи с этим целесообразно рассмотреть возможность использования, в качестве опорной точки для профиля абляции, индивидуально выбираемой точки на роговице, имеющей фиксированное положение относительно центра зрачка. В этой связи может быть, в частности, рассмотрена точка, в которой ось зрачка пересекает поверхность роговицы. Ось зрачка проходит через центр зрачка и через поверхность роговицы. В случае операции на роговице использование точки, находящейся на роговице, как опорной точки для профиля воздействия, вместо точки, расположенной на расстоянии от роговицы (например, центра зрачка), позволяет избежать упомянутой погрешности.
Чтобы определить геометрическое положение центра воздействия, находящегося на роговице, относительно центра зрачка, необходима информация о радиусе вращательных движений глаза и о радиальном расстоянии между двумя центрами. Последний параметр определяется с учетом, в основном, глубины передней камеры глаза; небольшая доля этого радиального расстояния определяется толщиной роговицы.
Раскрытие изобретения
Изобретение основано на понимании того, что глубина передней камеры вместе с толщиной роговицы может в существенной степени варьировать от человека к человеку. Поэтому, чтобы добиться улучшенных результатов операции, целесообразно определять для каждого индивидуального пациента, метрологически четко определенным образом, глубину его передней камеры (принимая во внимание, если это необходимо, толщину роговицы) и учитывать измеренное значение при расчете положения центра воздействия на роговицу относительно положения центра зрачка. Например, применительно к тестовой группе пациентов было установлено, что глубина передней камеры, включая толщину роговицы, варьировала между примерно 2,8 и примерно 4,5 мм. С учетом размера этой надежно установленной вариации важный для изобретения вывод заключается в том, что принятие стандартного, фиксированного значения, например 3,5 мм, для глубины передней камеры с учетом толщины роговицы может оказаться далеко неоптимальным применительно к конкретному пациенту. Другими словами, следует ожидать довольно существенной погрешности в случае использования этого стандартного значения при расчете положения центра воздействия относительно центра зрачка.
Соответственно, изобретение направлено на создание способа, посредством которого для заданного профиля воздействия в офтальмологической, в частности рефракционной, лазерной хирургии можно при проведении операции определить на глазе опорную точку таким образом, чтобы обеспечить улучшенный результат операции.
С этой целью изобретение обеспечивает создание аппарата для офтальмологической, в частности рефракционной, лазерной хирургии, содержащего:
- источник лазерного пучка,
- средства позиционирования пучка, испускаемого указанным источником, для пространственного и временного управления перемещением лазерного пучка по оперируемому глазу,
- камеру для формирования изображений радужки и зрачка глаза,
- подключенный к камере программно управляемый компьютер для управления средствами позиционирования пучка в соответствии с профилем воздействия и настроенный на установление в процессе оперирования глаза, на основе данных об изображениях, поступающих от камеры, положения заданной точки на роговице глаза и на согласование положения профиля воздействия с установленным положением указанной точки на роговице.
Аппарат согласно изобретению снабжен измерительным устройством для измерения параметра, характеризующего глубину оперируемого глаза и соответствующего глубине передней камеры и, если это представляется желательным, толщине роговицы, причем данное устройство снабжает компьютер результатами измерений, а компьютер настроен на установление положения заданной точки на роговице с учетом указанного параметра.
Таким образом, согласно изобретению глубина передней камеры и, если это представляется желательным, толщина роговицы должны измеряться индивидуально для каждого пациента, а лазерное воздействие должно быть пространственно настроено относительно точки на роговице, положение которой было определено с учетом указанных измеренных значений. Заданная (опорная) точка предпочтительно находится на передней стороне роговицы. Измерение указанного параметра может быть проведено непосредственно перед началом операции.
Известны способы бесконтактного измерения биологической ткани на основе когерентной оптической интерферометрии, включающие, например, оптическую когерентную томографию или когерентную рефлектометрию, в частности оптическую низкокогерентную рефлектометрию (optical low-coherence reflectometry, OLCR). Эти измерительные способы, в которых используется широкополосное излучение (например, излучение поверхностно излучающего лазерного диода, SLED, усиленное спонтанное излучение, ASE, излучение лазера белого света), обеспечивают измерения биологических структур с высоким разрешением, доходящим до 1 мкм и менее.
Согласно предпочтительному варианту изобретения подобное когерентное оптическое интерферометрическое измерительное устройство, предпочтительно измерительное устройство на основе OLCR, интегрировано в аппарат для лазерной хирургии, причем высокая точность измерений, обеспечиваемая таким устройством, позволяет разрешать и точно регистрировать вариации глубины передней камеры и толщины роговицы у различных пациентов. Интегрирование измерительного устройства в аппарат для лазерной хирургии осуществляется таким образом, что испускаемый этим устройством измерительный пучок направляется на глаз коаксиально с лазерным пучком, используемым для воздействия на глаз. Это делает достаточным однократное позиционирование пациента. Однако, в случае необходимости, измерение может быть повторено и в ходе операции.
Не только глубина передней камеры, но и диаметр глаза могут быть различными у разных людей. Различия в диаметре глаза приводят к различиям его радиуса вращения в случае вращательных движений глаза. Соответственно, в предпочтительном варианте обеспечивается возможность учета компьютером, настроенным на установление положения заданной точки на роговице, измеренного до начала операции радиуса вращения глаза индивидуального пациента. Учет этого радиуса вращения, измеренного для индивидуального пациента, означает дополнительное усовершенствование по сравнению с использованием радиуса вращения, рассматриваемого как стандартная величина.
Как было упомянуто, в качестве заданной точки на роговице может быть взята точка, в которой ось зрачка пересекает поверхность роговицы. Альтернативно, может быть выбрана точка на роговице, положение которой относительно указанной точки пересечения является фиксированным.
В частности, применительно к методу LASIK, в котором, чтобы произвести абляцию, сначала отгибается лоскут, в процессе абляции отсутствует возможность прямого сканирования поверхности роговицы для поиска заданной точки. Соответственно, опорная точка для центра абляции может быть рассчитана только косвенными методами. Возможность таких расчетов может быть обеспечена непрерывным определением по данным об изображениях, формируемых камерой в процессе лазерного воздействия, текущего значения смещения центра зрачка, которое соответствует положению центра зрачка относительно заданного опорного положения. Значение смещения центра зрачка может быть определено, в частности, как вектор смещения, характеризующий направление и размер смещения центра зрачка относительно опорного положения. Как следствие, движения, совершаемые глазом в ходе лазерного воздействия, могут также характеризоваться вектором смещения, связанным с положением центра зрачка.
Использование измеренного параметра, характеризующего глубину, в свою очередь, позволяет рассчитать значение смещения (например, также в форме вектора) заданной точки на роговице, соответствующего значению смещения центра зрачка. По рассчитанному таким образом значению смещения заданной точки на роговице и известному опорному положению этой точки можно определить текущее положение данной точки. В этом случае в качестве опорного положения заданной точки на роговице предпочтительно выбрать положение, занимаемое заданной точкой на роговице, когда центр зрачка находится в своем опорном положении. Например, один раз, перед началом операции, можно определить положение точки, в которой ось пересекает поверхность роговицы, и ассоциированное с ней положение центра зрачка и запомнить эти положения в качестве опорных положений для заданной точки на роговице и для центра зрачка.
Изобретение относится также к способу офтальмологической, в частности рефракционной, лазерной хирургии, осуществляемому с использованием описанного аппарата и включающему следующие этапы:
- направляют лазерное излучение, испускаемое источником на глаз или внутрь глаза в соответствии с пространственно-временной последовательностью, определяемой желательным профилем воздействия, который пространственно настроен относительно заданной точки оперируемого глаза,
- измеряют, по меньшей мере, однократно до начала операции параметр, характеризующий глубину оперируемого глаза и соответствующий глубине передней камеры и, если это представляется желательным, толщине роговицы, и
- генерируют программу управления для компьютера таким образом, чтобы обеспечить во время операции установление, на основе данных об изображениях, поступающих от камеры, значения смещения центра зрачка и на установление положения заданной точки на роговице в зависимости от измеренного параметра, радиуса вращения глаза и установленного значения смещения, характеризующего направление и размер смещения центра зрачка относительно опорного положения центра зрачка.
Приводимые в данном описании сведения о предпочтительных вариантах аппарата для лазерной хирургии применимы, с соответствующими модификациями, также и к способу лазерной хирургии согласно изобретению.
Краткое описание чертежей
Далее изобретение будет описано со ссылками на прилагаемые чертежи.
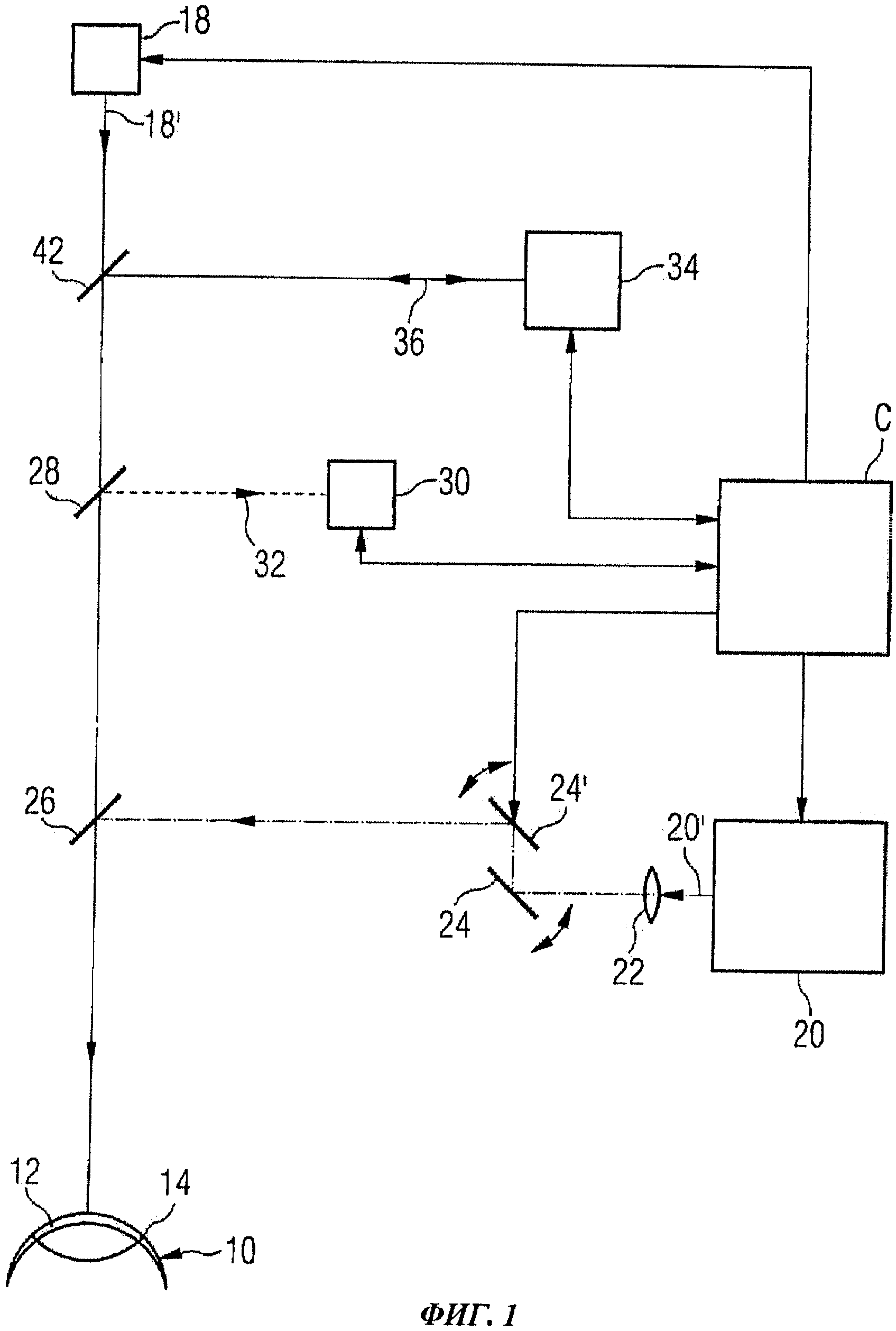
На фиг.1 представлена блок-схема, иллюстрирующая вариант аппарата для рефракционной лазерной хирургии глаза.
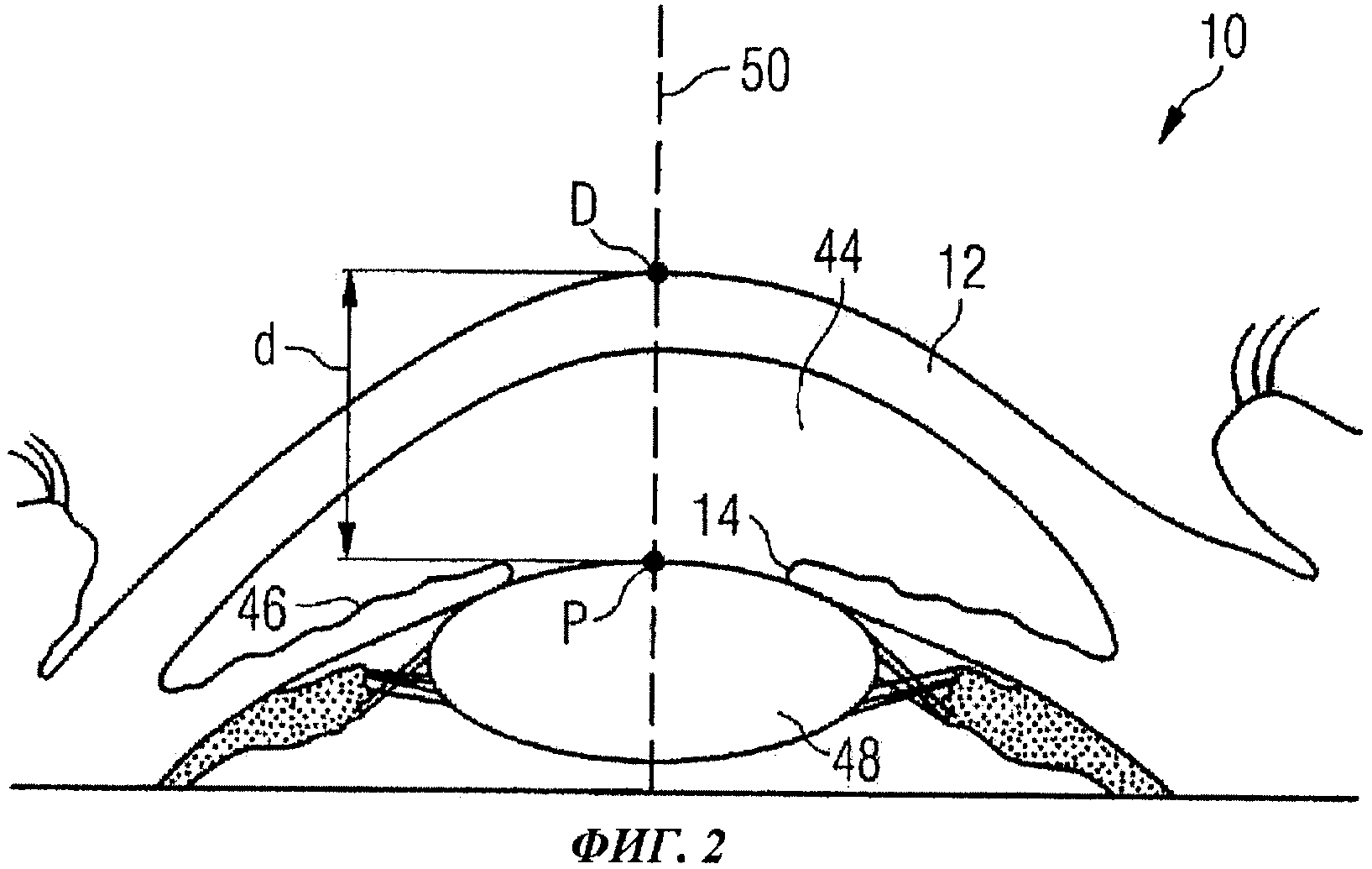
На фиг.2 показана, в разрезе, передняя часть глаза.
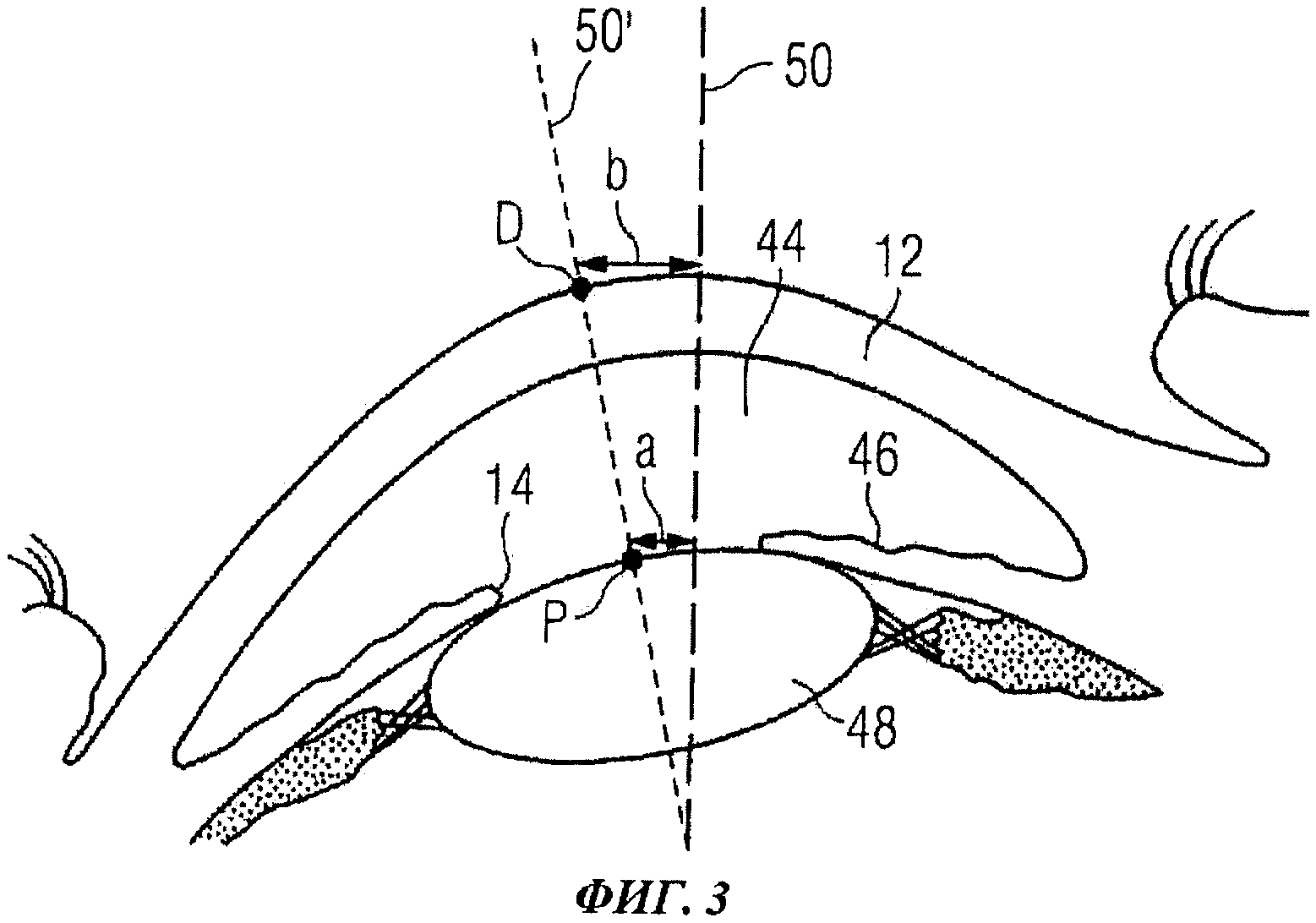
На фиг.3 показана, в разрезе, передняя часть глаза, развернутого относительно положения, показанного на фиг.2.
Осуществление изобретения
На фиг.1 схематично показан глаз 10, оперируемый посредством рефракционной лазерной хирургии. Роговица и кромка зрачка глаза 10 обозначены соответственно, как 12 и 14.
Представленный на фиг.1 аппарат для лазерной хирургии содержит такой известный компонент, как источник 18 света (например, светодиод или лазер) для фиксации глаза. Данный источник генерирует (слабый) фиксирующий пучок 18', на который направляется взгляд пациента, чтобы зафиксировать положение глаза.
Аппарат по изобретению содержит также операционный лазер 20, который испускает излучение 20', оказывающее лечебное воздействие на глаз. Это излучение направляется посредством линзы 22 на сканирующие зеркала 24, 24', а от них, посредством отклоняющего зеркала 26. на глаз 10. В случае метода LASIK лазер 20 может являться, например, эксимерным лазером, излучающим на длине волны 193 нм. Должно быть понятно, что, если это требуется для других вариантов лечения, можно использовать излучение и с другими длинами волн. Программно управляемый компьютер С управляет лазером 20 и сканирующими зеркалами 24, 24' в соответствии с предварительно рассчитанным профилем воздействия. В дальнейшем описании принимается, что посредством представленного аппарата осуществляется метод LASIK; соответственно, под профилем воздействия понимается профиль абляции.
Аппарат для лазерной хирургии дополнительно содержит устройство для отслеживания движений глаза (eye-tracker), которое, в свою очередь, содержит камеру 30, формирующую изображения глаза, более конкретно его зрачка и радужки (соответствующий пучок излучения от отклоняющего зеркала 28 к камере обозначен стрелкой 32). Данные об изображениях затем анализируются компьютером С или установленным на его входе модулем обработки изображений (не показан), чтобы отслеживать движения глаза, которых пациент, как правило, не в состоянии избежать, несмотря на попытки зафиксировать взгляд на фиксирующем излучении 18'. Компьютер С учитывает детектированные движения глаза при управлении сканирующими зеркалами 24, 24', чтобы как можно точнее соотнести профиль абляции с выбранной опорной точкой на поверхности роговицы.
В дополнение, в аппарат для лазерной хирургии интегрировано измерительное устройство 34 для OLCR. Это, само по себе известное, устройство содержит источник измерительного пучка, который направляется на глаз 10 отклоняющим зеркалом 42. При этом то же самое отклоняющее зеркало 42 направляет на измерительное устройство 34 распространяющееся по тому же пути, что и измерительный пучок, излучение, отраженное от глаза 10. Этот процесс обозначен двойной стрелкой 36.
При использовании метода LASIK, еще до того как лоскут будет вырезан и отвернут, измерительное устройство 34 измеряет глубину передней камеры глаза с учетом толщины роговицы. Передняя камера 44 глаза показана на фиг.2; показаны также радужка 46 и хрусталик 48 глаза 10. Суммарная глубина передней камеры (включающая толщину роговицы) обозначена как d.
На фиг.2 показаны также ось 50 зрачка, соединяющая центр Р зрачка с точкой D пересечения, в которой эта ось пересекает переднюю поверхность роговицы 12.
Вращение глаза приводит к смещению оси 50 зрачка и, соответственно, к смещению центра Р зрачка и точки D пересечения. Эта ситуация представлена на фиг.3, где новая ось зрачка обозначена, как 50'. Для сравнения на фиг.3 показана также ось 50 зрачка в состоянии, представленном на фиг.2, причем через a и b обозначены расстояния, на которые сместились центр Р зрачка и точка D пересечения соответственно относительно этого состояния. Можно видеть, что в результате движения зрачка точка D сместилась существенно в большей степени, чем центр Р зрачка 4 и толщины роговицы 12, т.е. от значения параметра d.
Компьютер С аппарата для лазерной хирургии задает в качестве центра абляции не центр Р зрачка, а точку D пересечения. С этой целью он перед началом операции однократно определяет, например, положения центра Р зрачка и точки D пересечения и запоминает найденные значения как положения опорных точек. В процессе лазерного воздействия компьютер С непрерывно определяет, на основании изображений глаза, поступающих от камеры 30, текущее положение центра Р зрачка и рассчитывает вектор смещения, который характеризует степень и направление смещения текущего положения центра Р относительно сохраненного опорного положения. По найденному таким образом вектору смещения центра Р зрачка компьютер С может рассчитать, основываясь на найденном значении параметра d радиуса вращения зрачка глаза 10 (который также может быть найден посредством измерений или задан в качестве стандартизованного значения), вектор смещения для точки D пересечения. Такой расчет производится посредством простых математических зависимостей, например с использованием хорошо известных теорем о пересечении в геометрии. По найденному таким методом вектору смещения для точки D пересечения и сохраненному в памяти положению этой точки компьютер С может рассчитать текущее положение данной точки D. Объем подобных расчетов, очевидно, относительно невелик.
Реферат
Группа изобретений относится к медицине и медицинской технике, к офтальмологической, в частности рефракционной, лазерной хирургии. Аппарат для лазерной хирургии содержит источник лазерного пучка, средства позиционирования пучка, испускаемого указанным источником, для пространственного и временного управления перемещением лазерного пучка по оперируемому глазу, камеру для формирования изображений радужки и зрачка глаза и подключенный к камере программно управляемый компьютер для управления средствами позиционирования пучка в соответствии с профилем воздействия и настроенный на установление в процессе оперирования глаза, на основе данных об изображениях, поступающих от камеры, положения заданной точки на роговице глаза и на согласование положения профиля воздействия с установленным положением указанной точки на роговице. Также аппарат содержит измерительное устройство, снабжающее компьютер результатами измерения для определения параметра, характеризующего глубину оперируемого глаза и соответствующего глубине передней камеры и, если это представляется желательным, толщине роговицы. При этом компьютер настроен на установление, на основе данных об изображениях, поступающих от камеры, значения смещения центра зрачка и на установление положения заданной точки на роговице в зависимости от измеренного параметра, радиуса вращения глаза и установленного значения смещения, характеризующего направление и размер смещения центра зрачка относительно опорного положения центра зрачка. Способ лазерной хирургии осуществляется с использованием вышеуказанного аппарата и заключается в том, что лазерное из
Формула
- источник (20) лазерного пучка,
- средства (24, 24', 26) позиционирования пучка, испускаемого указанным источником, для пространственного и временного управления перемещением лазерного пучка по оперируемому глазу,
- камеру (30) для формирования изображений радужки и зрачка глаза и
- подключенный к камере программно-управляемый компьютер (С) для управления средствами позиционирования пучка в соответствии с профилем воздействия и настроенный на установление в процессе оперирования глаза, на основе данных об изображениях, поступающих от камеры, положения заданной точки на роговице глаза и на согласование положения профиля воздействия с установленным положением указанной точки на роговице,
отличающийся тем, что содержит измерительное устройство (34), снабжающее компьютер результатами измерения для определения параметра (d), характеризующего глубину оперируемого глаза и соответствующего глубине передней камеры и, если это представляется желательным, толщине роговицы, при этом компьютер настроен на установление на основе данных об изображениях, поступающих от камеры (30), значения смещения (a) центра (Р) зрачка и на установление положения заданной точки на роговице в зависимости от измеренного параметра (d), радиуса вращения глаза и установленного значения смещения, характеризующего направление и размер смещения центра (Р) зрачка относительно опорного положения центра зрачка.
- направляют лазерное излучение, испускаемое источником (20) на глаз или внутрь глаза в соответствии с пространственно-временной последовательностью, определяемой желательным профилем воздействия, который пространственно настроен относительно заданной точки оперируемого глаза,
- измеряют, по меньшей мере, однократно до начала операции параметр, характеризующий глубину оперируемого глаза и соответствующий глубине передней камеры и, если это представляется желательным, толщине роговицы, и
- генерируют программу управления для компьютера (С) таким образом, чтобы обеспечить во время операции установление на основе данных об изображениях, поступающих от камеры (30), значения смещения (a) центра (Р) зрачка и на установление положения заданной точки на роговице в зависимости от измеренного параметра (a), радиуса вращения глаза и установленного значения смещения, характеризующего направление и размер смещения центра (Р) зрачка относительно опорного положения центра зрачка.
Комментарии