Способ контроля динамики параметрической безотказности технических систем - RU2745968C1
Код документа: RU2745968C1
Чертежи
Описание
Изобретение относится к способам контрольных испытаний ракетно-космической техники для подтверждения требований к безотказности, в частности расчетно-экспериментальным способам оценивания и контроля безотказности технических систем (ТС) по переменным параметрам состояния (ПС) и может быть использовано для обеспечения заданных требований к показателям безотказности сложных, дорогостоящих технических систем ракетно-космической техники при временных и технико-экономических ограничениях, выделяемых на создание системы.
Способность данного технического решения заключается в обеспечении производить контроль показателей параметрической безотказности любых ТС по переменным ПС, обеспечивая возможность сокращения числа и периода проведения испытаний ТС при повышении точности оценивания и достоверности контроля безотказности и обоснованного принятия ТС в эксплуатацию, а также возможности прогнозирования параметрической безотказности ТС и определения дальнейшего периода целевого использования, с учетом требуемого (заданного) уровня безотказности.
Современные сложные ТС, например, ракетно-космическая, авиационная техника, ТС в атомной энергетике и другие, состоят из множества различных подсистем и элементов, эффективность которых существенно влияет не только на успешное решение целевых задач ТС, но и на безопасное ее использование. Ключевым свойством эффективности ТС является надежность, включающая безотказность, долговечность, ремонтопригодность, сохраняемость, восстанавливаемость и готовность [1]. При создании технических систем определяющим является свойство безотказности, которая характеризуется различными показателями [1]. Основным показателем безотказности ТС является вероятность безотказной работы (ВБР) за период целевого использования. Обычно именно ВБР лимитирует объем и период проведения испытаний ТС. Однако из-за трудоемкости и высокой стоимости полномасштабных испытаний дорогостоящих и высоконадежных ТС спланировать и провести достаточный, для достоверного подтверждения требований к ВБР ТС, объем испытаний в современных ограниченных временных и технико-экономических условиях достаточно сложно. Особенно данный факт хорошо наблюдается для высоконадежных ТС, период целевого использования которых может составлять десятки лет.
В практике известны способы-аналоги определения безотказности ТС, которые основаны на исследовании влияния внешних (нагружающих) факторов на ПС (метод «нагрузка-прочность») или невыход последних за допустимые пределы (допусковые модели отказов) [2, 3, 4]. Для чего проводят испытания ТС и измеряют определяющие ПС при установленном значении нагрузки; вычисляют параметрическую надежность (безотказность) - как вероятность непревышения ПС значения нагрузки или невыхода ПС за допустимый предел.
Недостатками данных способов являются:
1) не учитывают влияние проведенных доработок на изменение безотказности ТС;
2) существенное влияние точности измерения уровня нагрузки на достоверность оценивания и контроля безотказности ТС;
3) необходимость знания вида распределения нагрузки;
4) сложность создания адекватных условий проведения испытаний;
5) не учитывают динамику параметров состояния, т.е. предполагают, что параметры состояния стабильны и не меняются во времени;
6) наличие значительной априорной информации о структуре и вероятностных характеристиках изменения ПС;
7) существенное влияние объема измерений ПС на точность оценивания показателей параметрической безотказности, т.е. требуют значительное время проведения испытаний.
Наиболее близким по технической сущности к заявленному способу и выбранным в качестве прототипа является способ оценки надежности радиоэлектронных устройств [5].
В изобретении, которое принято за прототип, решается задача контроля изделий радиоэлектронной техники и возможности оценки безотказности ТС по их устойчивости к воздействующим эксплуатационным факторам. Для чего отбирают одно или несколько устройств-эталонов с подтвержденным ресурсом, превышающим ресурс контролируемого устройства; изготавливают одинаковое число образцов контролируемого и устройства-эталона из элементов с одинаковым разбросом параметров и не имеющих скрытых производственных дефектов; определяют основные воздействующие факторы, наиболее сильно влияющие на работоспособность контролируемого устройства; экспериментально изменяют воздействующий фактор относительно допустимого значения; определяют начальные запасы устойчивости контролируемого и устройства-эталона по каждому фактору; в режиме циклического нагружения испытывают образцы в течение некоторой части, от установленного ресурса; определяют величины остаточных запасов устойчивости по всем воздействующим факторам; по разности между начальным и остаточным запасами устойчивости с учетом продолжительности испытаний определяют средние скорости дрейфа запасов устойчивости контролируемого и изделия-эталона по основным воздействующим факторам; сравнивают начальные запасы устойчивости и средние скорости их изменения контролируемого и устройства-эталона; судят об ожидаемом значении ресурса (безотказности) контролируемого устройства; если начальный запас устойчивости контролируемого устройства не меньше начального запаса устойчивости устройства-эталона и средняя скорость дрейфа не больше средней скорости дрейфа запаса устойчивости устройства-эталона, ресурс (безотказность) контролируемого устройства считается выше ресурса (безотказности) устройства-эталона.
Способ-прототип имеет следующие недостатки:
1) не учитывает влияние проведенных доработок на безотказность создаваемой ТС;
2) не учитывает физико-химическое изменение материалов и конструкции ТС;
3) не позволяет получить (оценить) количественные значения показателей безотказности создаваемой ТС;
4) не позволяет определить (оценить) гарантированный уровень безотказности создаваемой ТС;
5) не позволяет определить дальнейший период целевого использования ТС;
6) не применим для высоконадежных, дорогостоящих и уникальных ТС, для которых отсутствуют (либо невозможно подобрать) устройства-эталоны;
7) требует минимум два образца для проведения испытания: создаваемое устройство и устройство-эталон с подтвержденным уровнем безотказности.
В предлагаемом изобретении устраняются отмеченные недостатки: контроль параметрической безотказности ТС проводят по результатам испытаний одного опытного образца и построения плотности вероятности оценок динамики параметрической безотказности на основе мониторинга изменяющихся во времени (из-за протекающих физико-химических процессов и проведенных доработок ТС) ПС ТС в процессе ограниченного периода испытаний, а также возможности определения дальнейшего (целесообразного) периода целевого использования ТС при заданном уровне безотказности. Данный эффект позволит повысить достоверность подтверждения требований к безотказности любых ТС, определить количественные значения параметрической безотказности сложных ТС без полномасштабных испытаний даже по одному пилотному образцу ТС при ограниченном периоде отработки и определить дальнейший целесообразный период целевого использования ТС при заданном уровне безотказности, что актуально при обосновании решения о возможности продления срока эксплуатации ТС.
Техническая задача изобретения заключается в сокращении объема и периода испытаний ТС при повышении достоверности и точности контроля безотказности ТС, а также возможности получения количественных значений параметрической безотказности, ее прогнозирования и определения периода дальнейшего целевого использования ТС с требуемым уровнем безотказности.
Поставленная техническая задача в предлагаемом способе контроля динамики параметрической безотказности технических систем достигается тем, что изготавливают только одну контролируемую ТС из элементов с одинаковым разбросом параметров и не имеющих скрытых дефектов, выявляют информативные ПС и для каждого из них определяют допустимые интервалы, нахождение ПС в которых обеспечивается безотказная работа технической системы, проводят граничные испытания ТС при воздействии эксплуатационных факторов в течение некоторого ограниченного периода Tu, разделенный на n циклов с временем испытаний в каждом цикле Тцик., проводят мониторинг значений ПС в моменты времени ti, выбирают модель изменения среднего значения для каждого ПС, строят плотности вероятности оценок параметров моделей в зависимости от результатов мониторинга (измерений) ПС, определяют несмещенные оценки параметров моделей, определяют несмещенные оценки переменных во времени ВБР ТС и их среднеквадратические отклонения (СКО) по каждому ПС, определяют точечную оценку ВБР ТС и ее СКО по всем параметрам состояния, определяют нижнюю границу ВБР ТС, прогнозируют точечную и интервальную оценки ТС и СКО до заданного времени целевого использования ТЦИ, сравнивают с требуемыми значениями и обосновывают решение о принятии ТС в эксплуатацию или переходу к следующему этапу испытаний, определяют дальнейший период целевого использования ТС с требуемым уровнем безотказности.
Сущность изобретения поясняется следующими графическими материалами:
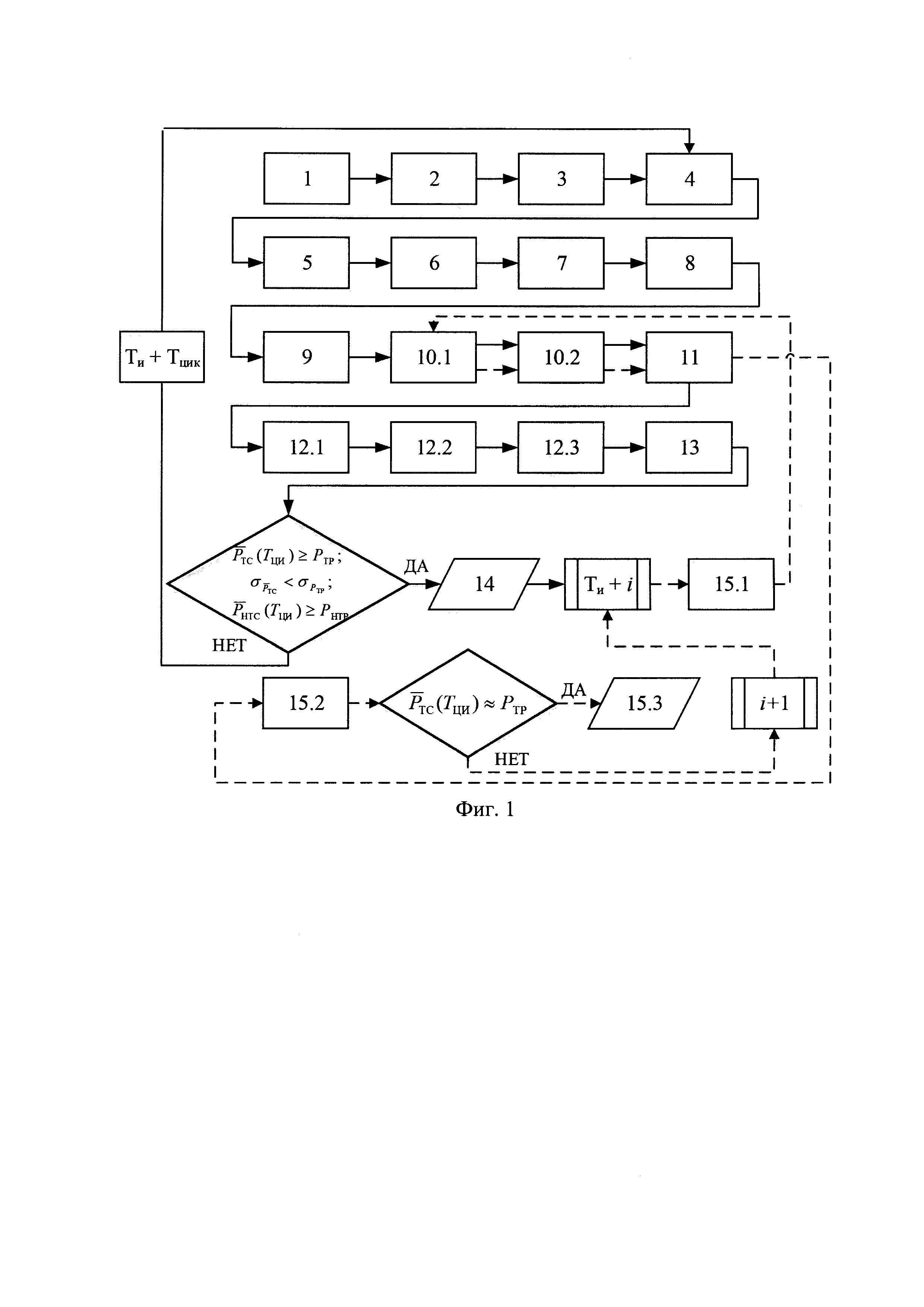
фиг. 1 - функциональная схема способа контроля динамики параметрической безотказности технических систем, где:
шаг 1. Изготавливают опытный образец ТС из элементов с одинаковым разбросом параметров и не имеющих скрытых дефектов, блок 1.
Шаг 2. Выявляют информативные ПС ТС Xj, j=1,…, J, которые влияют на безотказную работу ТС и, подчиняющиеся нармальному закону распределения, информацию о которых заносят в блок 2.
Шаг 3. Устанавливают допустимые пределы для ПС шага 2 (блока 2) такие [XjH, XjB], что при нахождении ПС в этих пределах обеспечивается безотказная работа ТС в течение периода целевого использования ТЦИ, которые записывают в блок 3.
Шаг 4. Проводят граничные испытания опытного образца ТС (блок 4) при воздействии эксплуатационных факторов в течение некоторого ограниченного периода Tu, которые разбивают на n циклов, соответствующие штатному времени работы ТС Тцик.≤Tu.
Шаг 5. Проводят мониторинг значений ПС в моменты времени ti либо измеряют значения ПС в конце каждого цикла, результаты которых заносят в таблицу блока 5.
Шаг 6. Строят модель изменения среднего значения ПС при испытаниях (эксплуатации), которую вписывают в блок 6:

где М0 - начальное значение МО (при t=t0);
А - показатель скорости изменения МО, свои для каждого ПС.
Шаг 7. Строят плотности вероятности (ПВ) оценок параметров М0, А, σ по результатам испытаний каждого выбранного j-ro параметра шага 2 (блока 2), данных таблицы шага 5 (блока 5) на основе специализированного программного обеспечения и ЭВМ блока 7:



Шаг 8. Строят автономные ПВ оценок неизвестных параметров на основе ПВ шага 7 (блок 8):



Шаг 9. Определяют несмещенные оценки параметров и их среднеквадратические отклонения (СКО), информацию о которых записывают в блок 9:



Шаг 10. Определяют изменяющуюся во времени несмещенную оценку ВБР ТС по каждому ПС при помощи ЭВМ, по следующему алгоритму.
Шаг 10.1. Строят ПВ оценок ПС в каждый момент времени при переменном среднем значении ПС модели нага 6, с учетом значений оценок шага 9 (блока 9) и записывают в блок 10.1

Шаг 10.2. Определяют ВБР и ее СКО по каждому параметру состояния шага 2 (блока 2) в зависимости от времени испытаний ТС t и формируют таблицу значений в блоке 10.2:



Шаг 11. Определяют оценку ВБР ТС и ее СКО по всем параметрам состояния с учетом значений таблицы блока 10.2 и записывают в блок 11:

Шаг 12. Определяют нижнюю доверительную границу
Шаг 12.1. Вычисляют параметры бета-распределения при оценках ВБР и ее СКО ТС таблицы блока 11, которые записывают в блок 12.1:

Шаг 12.2. Строят ПВ оценок ВБР ТС (блок 12.2):

где В(α, β) - бета-функция, которую вычисляют на основе гамма-функции

Шаг 12.3. Определяют нижнюю доверительную границу

Шаг 13. Прогнозируют безотказность ТС шагов 11 и 12 до заданного времени целевого использования ТЦИ, которые записывают в блок 13.
Шаг 14. Сравнивают полученные значения шага 11 и 12 с требуемыми: при выполнении условий

Шаг 15. Определяют допустимый период целевого использования (или эксплуатации) ТС с требуемым уровнем безотказности численным способом на основе ЭВМ и специального программного обеспечения по следующему алгоритму.
Шаг 15.1 Увеличивают значение ТЦИ на i=1 ед. времени, данный результат записывают в блок 15.1.
Шаг 15.2 Рассчитывают оценку ВБР ТС по зависимостям (11)-(14) шагов 10 и 11, с учетом значений ТЦИ+i блока 15.1, результат которой записывают в блок 15.2.
Шаг 15.3 Сравнивают оценку ВБР ТС Pi(ТЦИ+i) с требуемой РТР, если Pi(ТЦИ+i)≈РТР, то заканчивают расчет и записывают время допустимого целевого использования (эксплуатации), равное ТЦИ+i в блок 15.3; если Pi(ТЦИ+i)>РТР, то повторяют шаги 15.1-15.2 со значением i+1.
«Промышленная применимость» способа обусловлена возможностью производить контроль параметрической безотказности любых сложных, дорогостоящих ТС по переменным параметрам состояния при ограничении объема и периода отработки, обеспечивая возможность определения допустимого периода испытаний (или эксплуатации) ТС с требуемым ресурсом (безотказностью) и реализовать его на штатных ЭВМ.
Сопоставление заявленного способа контроля показателей безотказности ТС по результатам испытаний элементов с прототипом показывает, что заявленный способ существенно отличается от прототипа.
Общие признаки заявляемого способа и прототипа:
1. Изготавливают образец технической системы с одинаковым разбросом параметров и не имеющий скрытых производственных дефектов.
2. Предполагают нормальный закон распределения параметров состояния.
3. Испытывают техническую систему в течение некоторого ограниченного периода, разбитый на циклы.
4. Учитывают изменение (дрейф) безотказности технической системы.
Отличительные признаки предлагаемого решения.
1. Проводят испытания только одного опытного образца технической системы.
2. Выявляют информативные параметры состояния, которые влияют на безотказную работу технической системы.
3. Устанавливают допустимые пределы для параметров состояния.
4. Измеряют значения параметров состояния в ti моменты времени либо в конце каждого цикла испытаний.
5. Определяют количественное значение вероятности безотказной работы технической системы за время целевого использования ТЦИ и ее среднеквадратическое отклонение, а также гарантированный уровень безотказности.
6. Сравнивают полученные значения безотказности с требованиями и принимают решение о принятии технической системы в эксплуатацию.
7. Определяют допустимый период целевого использования (или эксплуатации) технической системы с требуемым уровнем безотказности.
Демонстрация работоспособности способа по алгоритму фиг. 1 проведена при контроле безотказности создаваемой ТС, к которой предъявляются требования к ВБР ТС РТР=0,97 и СКО σРТР=0,02 в течение периода целевого (гарантийного) использования ТЦИ=2000 ч., а также требований к гарантированному уровню ВБР РН=0,93 при доверительной вероятности γ=0,9.
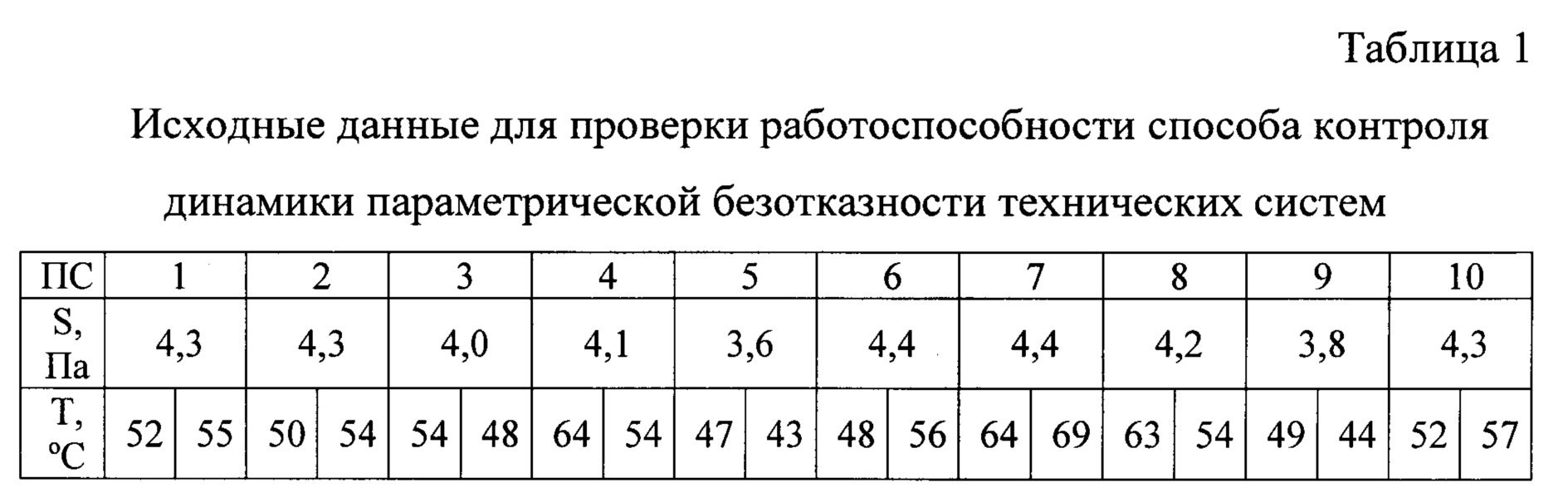
Для этого изготовили и провели испытания одной технической системы в течение ограниченного периода Tu=100 часов, разбитый на n=10 циклов по Тцик.=10 ч. каждый при заданных условиях эксплуатации. В процессе испытания измерялись основные параметры состояния: напряженно-деформированное состояние корпуса ТС S в конце каждого i-го цикла и температуры Т внутри ТС, измеренную в середине и в конце i-x циклов. Результаты измерений основных параметров состояния S и Т представлены в табл. 1, причем, допустимые границы для ПС, при которых обеспечивается безотказная работа ТС, установлены Smax=10 Па, Т∈[20; 80]°С.
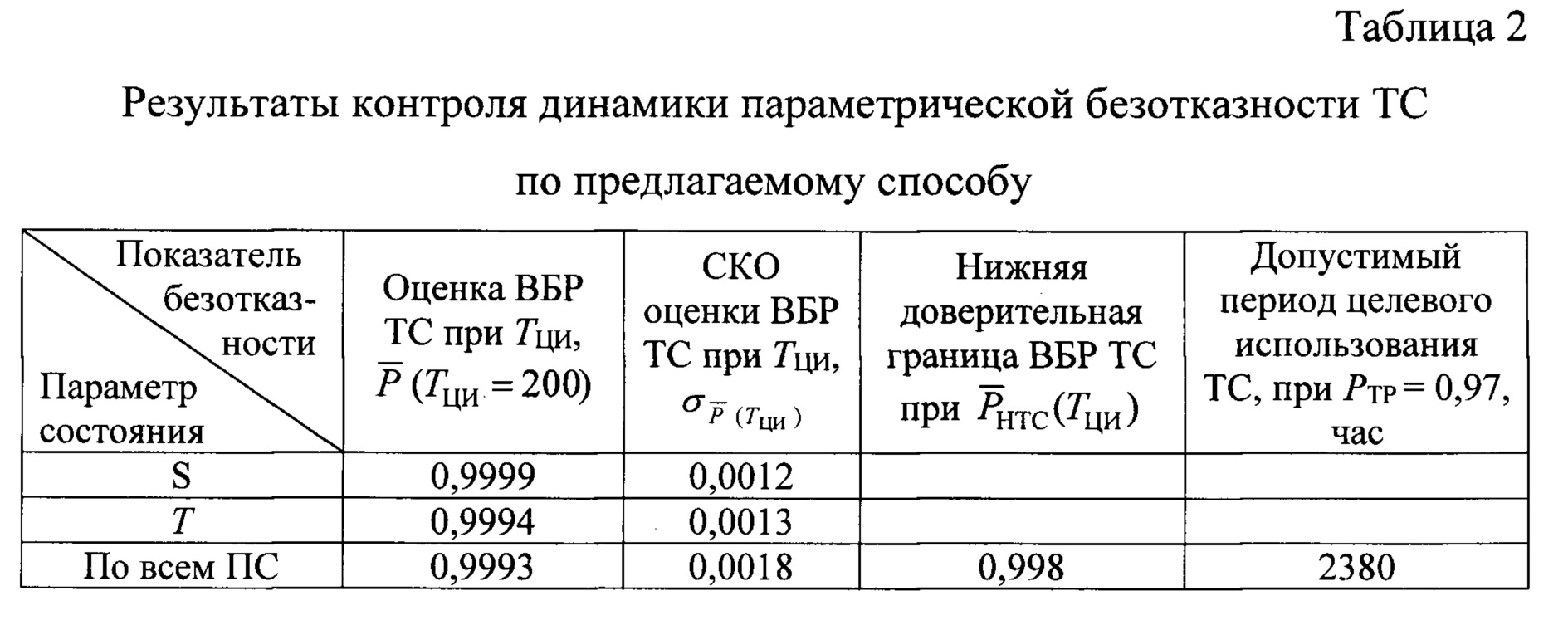
В табл. 2 представлены результаты оценивания параметрической безотказности ТС по предлагаемому способу, с целью подтверждения требований к безотказности ТС и определения времени дальнейшей эксплуатации ТС при требуемом уровне безотказности РТР.
Анализ полученных результатов позволяет сделать вывод о том, что безотказность ТС, определенная по результатам ограниченного периода испытаний Tu - 100 часов, удовлетворяет требованиям, т.к. Р(ТЦИ)=0,9993>РТР; σР(ТЦИ)<σРТР и РН(ТЦИ)>РНТР. Причем, период эксплуатации ТС (при требуемом уровне ВБР ТС РТР=0,97) может быть продлен на Т=2380-2000=380 часов, что актуально при обосновании решения о продлении срока эксплуатации ТС.
Таким образом, поставленная задача изобретения по повышению достоверности и точности контроля безотказности ТС, возможности ее прогнозирования и определения периода дальнейшего целевого использования ТС с требуемым уровнем безотказности, полученные по результатам испытания только одной ТС при ограниченном периоде, достигнута.
Источники информации
1. ГОСТ 27.002-2015 Надежность в технике. Термины и определения. - М.: Стандартинформ, 2016. - с. 2-3.
2. Милёхин Ю.М., Берсон А.Ю., Кавицкая В.К., Еренбург Э.И. Надежность ракетных двигателей на твердом топливе: Монография - М.: МГУП, 2005 - с. 78-94.
3. Труханов В.М. Надежность в технике. - 2-е изд., перераб. и доп. - М.: ООО Издательский дом «Спектр», 2017 - с. 157-163.
4. RU №2003173, 1993.
5. SU №1471157, 1989.
Реферат
Изобретение относится к способам контрольных испытаний ракетно-космической техники для подтверждения требований к безотказности, в частности расчетно-экспериментальным способам оценивания и контроля безотказности технических систем (ТС) по переменным параметрам состояния (ПС). Технический результат заключается в возможности сокращения числа и периода проведения испытаний ТС при повышении точности оценивания и достоверности контроля безотказности и обоснованного принятия ТС в эксплуатацию, а также возможности прогнозирования параметрической безотказности ТС и определения дальнейшего периода целевого использования, с учетом требуемого (заданного) уровня безотказности. Технический результат достигается тем, что предложен способ контроля динамики параметрической безотказности технических систем, заключающийся в том, что изготавливают контролируемую техническую систему из элементов с одинаковым разбросом параметров и не имеющих скрытых дефектов, подвергают техническую систему граничным испытаниям при воздействии эксплуатационных факторов, учитывают изменение безотказности, оценивают безотказность, отличается тем, что выявляют информативные параметры состояния технической системы, определяют допустимые интервалы для каждого параметра состояния, при нахождении параметров состояния в которых обеспечивается безотказная работа технической системы, проводят измерение значений параметров состояния в процессе граничных испытаний технической системы в моменты времени ti, строят модель изменения среднего значения каждого параметра состояния, строят плотности вероятности оценок параметров моделей для параметров состояния в зависимости от результатов измерений и определяют несмещенные оценки параметров моделей, определяют в зависимости от времени несмещенные оценки вероятности безотказной работы технической системы и их среднеквадратические отклонения по каждому параметру состояния, определяют оценку вероятности безотказной работы технической системы и ее среднеквадратическое отклонение по всем параметрам состояния, определяют нижнюю границу вероятности безотказной работы технической системы, прогнозируют безотказность технической системы до заданного времени целевого использования ТЦИ, сравнивают полученные оценки безотказности с требуемыми значениями и обосновывают решение о принятии технической системы в эксплуатацию, для которой устанавливают дальнейший период целевого использования с требуемым уровнем безотказности. 2 табл., 1 ил.
Комментарии