Способ и устройство для определения оптических аберраций глаза - RU2601853C2
Код документа: RU2601853C2
Чертежи











Описание
Область техники
Изобретение относится к способу и к устройству для определения оптических аберраций глаза с учетом его оптически активных компонентов.
Уровень техники
Известно определение волновых аберраций (аберраций волнового фронта) глаза как отклонений волнового фронта, вызываемых оптической системой глаза, от планарного волнового фронта, генерируемого посредством безаберрационной модели глаза. Волновой фронт, формируемый оптической системой, может быть определен посредством аберрометра Чернинга (Tscherning aberrometer), аберрометра Хартмана-Шека (Hartman-Shack aberrometer) или цифрового датчика волнового фронта.
Аберрометр Чернинга - это известное устройство для измерения аберраций глаза. Согласно принципу аберрометрии Чернинга параллельный оптический (далее - световой) пучок преобразуется в множество вторичных (составляющих) пучков. Образованные составляющие пучки создают заданную двумерную конфигурацию в плоскости, расположенной перпендикулярно оптической оси. Данную конфигурацию составляющих пучков проецируют через оптическую систему глаза, в результате чего на сетчатке глаза посредством первых проекций составляющих пучков формируется первый паттерн точек в виде оптических (далее - световых) точек на сетчатке. Сформированный на сетчатке первый паттерн точек проецируют через оптическую систему глаза в обратном направлении на вторую плоскость, находящуюся вне глаза, и в результате такого проецирования формируется второй паттерн точек (паттерн вторых световых точек), соответствующий вторым проекциям сформированных на сетчатке первых проекций составляющих пучков. Второй паттерн точек регистрируют как изображение. В плоскости изображения производят измерение взаимных смещений каждой второй световой точки и проекции на плоскость изображения того же составляющего пучка в составе регулярной двумерной конфигурации, сгенерированной посредством безаберрационной модели глаза. По множеству измеренных смещений реконструируют отклонения реального волнового фронта, сформированного оптической системой глаза, от идеального планарного волнового фронта для идеального (безаберрационного) глаза, не создающего ошибок изображения. По реконструированным аберрациям волнового фронта реального глаза можно определить ошибки изображения глаза, включая ошибки изображения высшего порядка. В качестве ошибок изображения высшего порядка рассматриваются, например, кома, трилистник, сферическая аберрация, четырехлистник и др. Из уровня техники известны глазной аберрометр (например аберрометр Чернинга) и способ использования аберрометра, а также способ оценивания второго паттерна для нахождения оценки смещений, измеренных во втором паттерне световых точек, образованном посредством составляющих пучков.
Волновые фронты, формируемые глазом (определенные, например, с помощью аберрометра Чернинга), которые включают ошибки изображения, могут служить - совместно с результатами измерений параметров глаза, таких как толщина роговицы, глубина передней камеры, толщина хрусталика и осевая длина глаза, а также топографии передней и задней поверхностей роговицы, определяемых, например, методом оптической когерентной томографии или записей посредством Шеймпфлюг-камеры, - в качестве основы для формирования индивидуальной (специфичной для конкретного глаза) модели глаза. С использованием построенной описанным методом индивидуальной модели глаза можно затем рассчитать, например, профиль абляции для лазерно-хирургической коррекции преломления передней поверхностью роговицы глаза и/или разработать конструкцию задней и/или передней сторон интраокулярной линзы, имплантируемой в глаз в целях коррекции ошибок изображения оптической системы глаза.
Известные способы расчета индивидуальных волновых фронтов глаза, которые, вследствие ошибок изображения оптической системы глаза, отличаются по форме от идеального планарного волнового фронта, основаны на модельных допущениях относительно биометрических данных глаза, например относительно осевой длины глаза (далее - длина глаза). Это, в частности, относится к аберрометрам, работающим согласно принципу Чернинга, а также к приборам, использующим датчик Хартмана-Шека или цифровой датчик волнового фронта.
В известных приборах за основу принимается, например, модель Гульстранда, в которой длина глаза равна 22,36 мм. Рассматриваемый вариант изобретения исходит из обнаружения (основанного на цифровом моделировании и клиническом опыте применения аберрометра и других устройств для исследования оптической системы глаза) того, что чем больше действительная длина глаза отличается от модельного значения длины глаза, тем больше погрешность оценки дефектов зрения глаза, рассчитанных по результатам измерений волнового фронта. Этот вывод проиллюстрирован в приводимой таблице. В ней для пяти длин глаза, в том числе отличающихся от значения (22,36 мм), принятого для длины глаза в модели, приведены расчетные данные об отклонениях волнового фронта в виде сферического и цилиндрического компонентов аберраций, свойственных дефектному зрению.

Раскрытие изобретения
Варианты изобретения направлены на разработку доступных способов и устройств для определения аберраций волнового фронта глаза, обеспечивающих более точный расчет или оценку дефектов зрения, включая аберрации высших порядков. Данные варианты позволяют получить оптимизированную индивидуальную модель глаза, а также оптимизированный профиль абляции для лазерно-хирургической коррекции преломления роговицей и/или произвести расчет интраокулярной линзы в отношении ее формы и материала.
Согласно определенным вариантам данная задача решена посредством способа определения оптических аберраций глаза в соответствии с пунктом 1 прилагаемой формулы.
В соответствии с вариантом изобретения данный способ включает реконструирование аберраций волнового фронта глаза как отклонений волнового фронта, формируемого оптической системой глаза в процессе аберрометрии, относительно идеального планарного волнового фронта, генерируемого улучшенной безаберрационной моделью глаза. При этом в данной модели глаза в качестве модельной длины глаза используется его действительная длина.
С этой целью действительная длина глаза может быть определена посредством биометрического измерения длины глаза применительно к исследуемому глазу. Измерения действительной длины глаза по оптической (т.е. визуальной) оси глаза могут выполняться с помощью новейших приборов, известных из уровня техники. В качестве примера таких приборов может быть упомянут прибор WaveLight OB 820.
Использование в модели глаза реально измеренной длины глаза позволяет с более высокой точностью рассчитать, на основе аберрометрических измерений, аберрации волнового фронта и ошибки изображения оптической системы глаза, а также улучшить результаты рефракционной хирургии роговицы, использующей данные о волновом фронте. Кроме того, рассчитанные таким образом аберрации волнового фронта и ошибки изображения могут повысить качество интраокулярных линз, имплантируемых в глаз с целью коррекции ошибок изображения.
По результатам определения, согласно изобретению, оптической аберрации глаза может быть модифицирована, с целью коррекции пресбиопии, передняя поверхность роговицы или интраокулярной линзы (ИОЛ).
В одном своем варианте изобретение применимо также для коррекции пресбиопии посредством конкретного воздействия на аберрации вплоть до 4-го порядка по Цернике (на цилиндрический компонент, кому, трилистник, четырехлистник и сферические аберрации) с целью добиться улучшенного зрения на близком расстоянии.
Способ может включать следующие операции:
(a) формирование из параллельного пучка оптических (далее - световых) лучей множества индивидуальных составляющих пучков, образующих двумерную конфигурацию,
(b) проецирование конфигурации составляющих пучков через оптическую систему глаза и получение, тем самым, из первых проекций составляющих пучков первого паттерна точек на сетчатке глаза;
(c) офтальмоскопическое проецирование первого паттерна на вторую плоскость, находящуюся вне глаза, с генерированием, тем самым, из вторых проекций первых проекций составляющих пучков, полученных на операции (b), второго паттерна точек;
(d) регистрацию второго паттерна во второй плоскости;
(e) конструирование, посредством вычислений, безаберрационной модели глаза с модельной длиной глаза, в качестве значения которой используют измеренную действительную длину глаза;
(f) измерение, для каждой второй проекции, зарегистрированной во второй плоскости, смещения офтальмоскопической проекции составляющего пучка во втором паттерне точек относительно проекции того же составляющего пучка двумерной конфигурации, генерируемой сконструированной моделью глаза, и
(g) реконструирование аберраций волнового фронта оптической системы глаза как отклонений волнового фронта, формируемого оптической системой, от волнового фронта, генерируемого безаберрационной моделью глаза.
Модель глаза может представлять глаз для целей оценки свойств глаза в объеме заданных допустимых пределов относительно заданных параметров качества.
Описанные методы конструирования улучшенной безаберрационной модели глаза, измерения смещения и реконструирования аберраций волнового фронта оптической системы глаза могут иметь практические применения. В некоторых случаях в результате замены значения длины глаза, принимаемого согласно модели, измеренным фактическим значением этой длины обеспечивается возможность более точного расчета аберраций волнового фронта.
Двумерная конфигурация составляющих пучков в первой плоскости может иметь форму матрицы, расположенной, по существу, перпендикулярно оптической оси глаза.
Если рассматривать оптическую ось глаза как первую оптическую ось, вторая плоскость может быть расположена, по существу, перпендикулярно второй оптической оси, ориентированной под углом к первой оптической оси глаза. Проецирование первого паттерна на вторую плоскость может быть осуществлено посредством приборов для непрямой офтальмоскопии.
Смещение второй проекции составляющих пучков во второй плоскости измеряется, например, по двум взаимно перпендикулярным координатным осям (x, y), расположенным во второй плоскости. В этом случае можно измерять смещения в x-направлении и в y-направлении.
Улучшенная безаберрационная модель глаза, использующая действительную длину глаза, может быть сконструирована, например, на основе модели Гульстранда или модели Лиу и Бреннана. Эти, уже упоминавшиеся две модели глаза доказали свою полезность в проведенных заявителем исследованиях аберраций волнового фронта с модельными допущениями для длины глаза. Неожиданно было установлено, что введение действительной длины глаза в этих моделях создает преимущества - намного превосходящие ожидания - в отношении точности рассчитанных аберраций волнового фронта и выводимых из них ошибок изображения (аберраций низшего и более высоких порядков) для индивидуального глаза. Использование действительной длины глаза дает улучшенные результаты не только для рассмотренных, но и для других моделей глаза.
Действительная длина глаза может быть определена непосредственным измерением длины глаза пациента. В этом случае может использоваться, например, уже упоминавшийся прибор WaveLight OB 820.
Измерение длины глаза может производиться в любой удобный момент, например непосредственно перед одной из операций (а)-(е). При этом измерение длины глаза может производиться с использованием по меньшей мере части параллельного пучка световых лучей, применяемого в операции (а).
В случае проецирования конфигурации составляющих пучков через оптическую систему глаза в соответствии с операцией (b) способа по изобретению фокальная точка проекции может находиться на заданном расстоянии перед сетчаткой глаза.
На операции (g), в процессе улучшенного реконструирования аберраций волнового фронта, волновой фронт, генерируемый оптической системой глаза, может быть представлен, как сумма полиномов Цернике, нормализованных к единичному кругу и взвешенных с использованием соответствующих коэффициентов для разложения по полиномам Цернике. В этом варианте реконструирование волнового фронта, генерируемого оптической системой глаза, может включать определение коэффициентов для разложения по полиномам Цернике, используемых для представления волнового фронта. В упомянутую сумму полиномов Цернике могут быть включены полиномы вплоть до 6-го или 8-го порядка. С использованием найденных коэффициентов Цернике для третьего, четвертого и пятого полиномов Цернике (т.е. для полиномов Цернике 2-ого порядка) и радиуса зрачка глаза можно рассчитать сферический и цилиндрический компоненты преломления глаза и угол астигматизма глаза.
На базе реконструированных аберраций волнового фронта, уточненных на операции (g), может быть построена улучшенная, индивидуальная (специфичная для конкретного пациента) модель глаза. При этом данная модель глаза может основываться на следующих параметрах:
(1) толщина роговицы, глубина передней камеры, толщина и/или положение хрусталика и действительная длина глаза, которые в каждом случае были определены по измерениям конкретного глаза;
(2) топографии передней и задней поверхностей роговицы, которые в каждом случае были определены по измерениям конкретного глаза; и
(3) передняя и задняя стороны хрусталика, которые в каждом случае были построены по результатам итеративного расчета с применением метода построения оптического хода лучей и использования данных, перечисленных в пунктах (1) и (2).
В этом случае данные, указанные в пункте (1), могут быть определены на оптической (например визуальной) оси глаза.
Указанные в пункте (2) измерения, проводимые в отношении глаза, могут являться интерферометрическими измерениями, например измерениями с использованием оптической когерентной томографии (ОКТ). Топографии передней и задней поверхностей роговицы могут быть получены, например, при измерениях посредством Шеймпфлюг-камеры. Для этой цели можно использовать также и ОКТ-измерения.
Специфичная для пациента модель глаза может быть использована для генерирования оптимизированного профиля абляции для лазерно-хирургической коррекции преломления исходной передней поверхности роговицы глаза или для конструирования, например, передней стороны интраокулярной линзы для хирургической имплантации в глаз с целью коррекции ошибок изображения оптической системы глаза, имеющих место до операции.
Согласно второму аспекту изобретения разработано устройство для определения оптической аберрации человеческого глаза, в оптическую систему которого входят роговица и хрусталик. Устройство содержит аберрометр для измерения оптических аберраций глаза, выполненный с возможностью:
формирования из параллельного пучка световых лучей множества составляющих пучков, образующих двумерную конфигурацию,
проецирования конфигурации составляющих пучков через оптическую систему глаза на сетчатку глаза с целью получить из первых проекций составляющих пучков первый паттерн, и
офтальмоскопического проецирования первого паттерна на вторую плоскость, находящуюся вне глаза, с получением, тем самым, второго паттерна из вторых проекций первых проекций на сетчатку.
В соответствии с изобретением устройство содержит арифметический блок, например компьютер, содержащий:
средства для конструирования безаберрационной модели глаза, использующей длину глаза, и
средства для улучшенного реконструирования аберраций волнового фронта глаза как отклонений волнового фронта, формируемого оптической системой глаза с помощью аберрометра, от идеального планарного волнового фронта, генерируемого моделью глаза.
Кроме того, в соответствии с вариантом изобретения средства для конструирования улучшенной модели глаза разработаны с возможностью использования действительной осевой длины глаза в качестве модельной осевой длины глаза. Устройство согласно второму аспекту изобретения обеспечивает те же преимущества, что и описанный выше способ согласно первому аспекту изобретения.
Улучшенная модель глаза может представлять глаз для целей оценки свойств глаза по формированию изображения в объеме заданных допустимых пределов относительно заданных параметров качества.
В одном примере аберрометр Чернинга может содержать, например, следующие компоненты:
источник оптического излучения (далее - источник света) для генерирования параллельного пучка световых лучей,
устройство для формирования из светового пучка множества составляющих пучков, образующих двумерную конфигурацию,
линзу аберроскопа, установленную на первой оптической оси для проецирования конфигурации составляющих пучков через оптическую систему глаза и получения, тем самым, из первых проекций составляющих пучков первого паттерна точек на сетчатке глаза,
офтальмоскопическое устройство для офтальмоскопического проецирования первого паттерна точек на вторую плоскость, находящуюся вне глаза, с целью получить из вторых проекций первых проекций второй паттерн точек.
Арифметический блок может содержать средства для измерения, применительно к каждой второй проекции составляющего пучка, зарегистрированной посредством офтальмоскопического устройства, смещения второй проекции во второй плоскости относительно проекции того же составляющего пучка двумерной конфигурации, генерируемой улучшенной моделью глаза. Для проведения данного измерения может быть использовано измерительное устройство или иное средство, пригодное для выполнения данной функции.
В аберрометре двумерная конфигурация составляющих пучков, расположенная в первой плоскости, по существу, перпендикулярно первой оптической (например визуальной) оси глаза, может быть регулярной, в частности иметь двумерную регулярность, например в виде матрицы.
Офтальмоскопическое устройство может иметь вторую оптическую ось, расположенную под углом к первой оптической оси, а вторая плоскость может быть расположена, по существу, перпендикулярно второй оптической оси.
Смещение вторых проекций может быть измерено вдоль двух взаимно перпендикулярных координатных осей (x, y), расположенных во второй плоскости, так что для каждой второй проекции составляющего пучка можно измерять смещения в x-направлении и в y-направлении.
Офтальмоскопическое устройство может содержать следующие компоненты:
первое полупрозрачное зеркало, установленное, по существу, диагонально между линзой аберроскопа и глазом, т.е. под углом к первой оптической оси, и служащее для отклонения траектории пучка, идущего от сетчатки через оптическую систему глаза, и для формирования тем самым второй оптической оси,
офтальмоскопическую линзу, установленную на второй оптической оси для проецирования первого паттерна и построения, посредством этого проецирования, второго паттерна, образованного вторыми проекциями сформированных на сетчатке первых проекций составляющих пучков, и
регистрирующее устройство, расположенное в конце второй оптической оси и служащее для регистрации второго паттерна, образованного вторыми проекциями.
Регистрирующее устройство может являться ПЗС-камерой, которая может быть снабжена ПЗС-приемниками, обладающими высокой светочувствительностью.
Офтальмоскопическое устройство может дополнительно содержать диафрагму для задания узкого оптического канала, вытянутого вдоль второй оптической оси. Диафрагма может быть установлена между линзой офтальмоскопа и регистрирующим устройством.
Источник оптического излучения может содержать лазер для генерирования лазерного пучка и оптику для расширения лазерного пучка с формированием требуемого светового пучка. Может использоваться инфракрасный (ИК) лазер или, например, лазер, испускающий в видимой (красной) области. Указанная оптика может быть сконфигурирована, например, как телескоп Кеплера.
Устройство по изобретению может дополнительно содержать устройство для настройки положения глаза (далее - юстировочное устройство), которое задает третью оптическую ось, расположенную под углом к первой оптической оси, и содержит следующие компоненты:
второе полупрозрачное зеркало, установленное, для задания третьей оптической оси, по существу, наклонно по отношению к первой оптической оси,
собирающую линзу, установленную на третьей оптической оси для проецирования передней части глаза, и
второе регистрирующее устройство, установленное на третьей оптической оси для регистрации изображения передней части глаза.
Второе полупрозрачное зеркало может быть установлено между источником света и линзой аберроскопа.
Юстировочное устройство может быть сконструировано с возможностью функционировать в ИК диапазоне оптического спектра. В этом случае второе полупрозрачное зеркало может отклонять идущее от глаза излучение, лежащее в ИК диапазоне. При этом второе регистрирующее устройство может быть ПЗС-камерой с ПЗС-датчиком, чувствительным в ИК диапазоне. В дополнение, на третьей оптической оси, между вторым полупрозрачным зеркалом и второй линзой офтальмоскопа, может быть установлен ИК полосовой фильтр.
Двумерная конфигурация составляющих пучков может формироваться установленной в световой пучок маской с множеством окон (отверстий или прозрачных участков). Расположение окон может соответствовать двумерной регулярной конфигурации, например регулярной двумерной конфигурации, образованной смежными окнами и имеющей прямоугольный или квадратный контур. Такая регулярная конфигурация составляющих пучков позволяет легко различать при визуальном наблюдении отклонения в первом и втором паттернах точек, проецируемых через оптическую систему глаза, отклонения этих паттернов в целом или положений индивидуальных вторых проекций от регулярной конфигурации. Благодаря этому опытный офтальмолог сможет, основываясь только на визуальном впечатлении, дать оценку типа дефектного зрения глаза.
Краткое описание чертежей
Другие возможности для конфигурирования способа или устройства согласно вариантам изобретения станут ясны из нижеследующего подробного описания этих вариантов, приводимого со ссылками на прилагаемые чертежи, где:
на фиг. 1 схематично представлена базовая конфигурация примера аберрометра Чернинга;
на фиг. 2 схематично изображен вариант оптического аберрометра для клинического использования;
на фиг. 3, в левой ее части, представлен пример заданной регулярной двумерной конфигурации составляющих пучков, в ее средней и правой частях - два примера обработанного и инвертированного изображения, полученные посредством офтальмоскопического проецирования в плоскость изображения, находящуюся вне глаза, паттернов точек, сформированных на сетчатке; в правой части (в увеличенном масштабе) проиллюстрирован принцип оценивания второго паттерна точек путем измерения смещений вторых проекций;
на фиг. 4 схематично проиллюстрирована модель глаза по Гюльстранду, причем в верхней части фиг. 4 показана геометрическая конфигурация оптических элементов модели глаза, а в ее нижней части, в таблице, приведены численные значения оптических свойств оптических элементов;
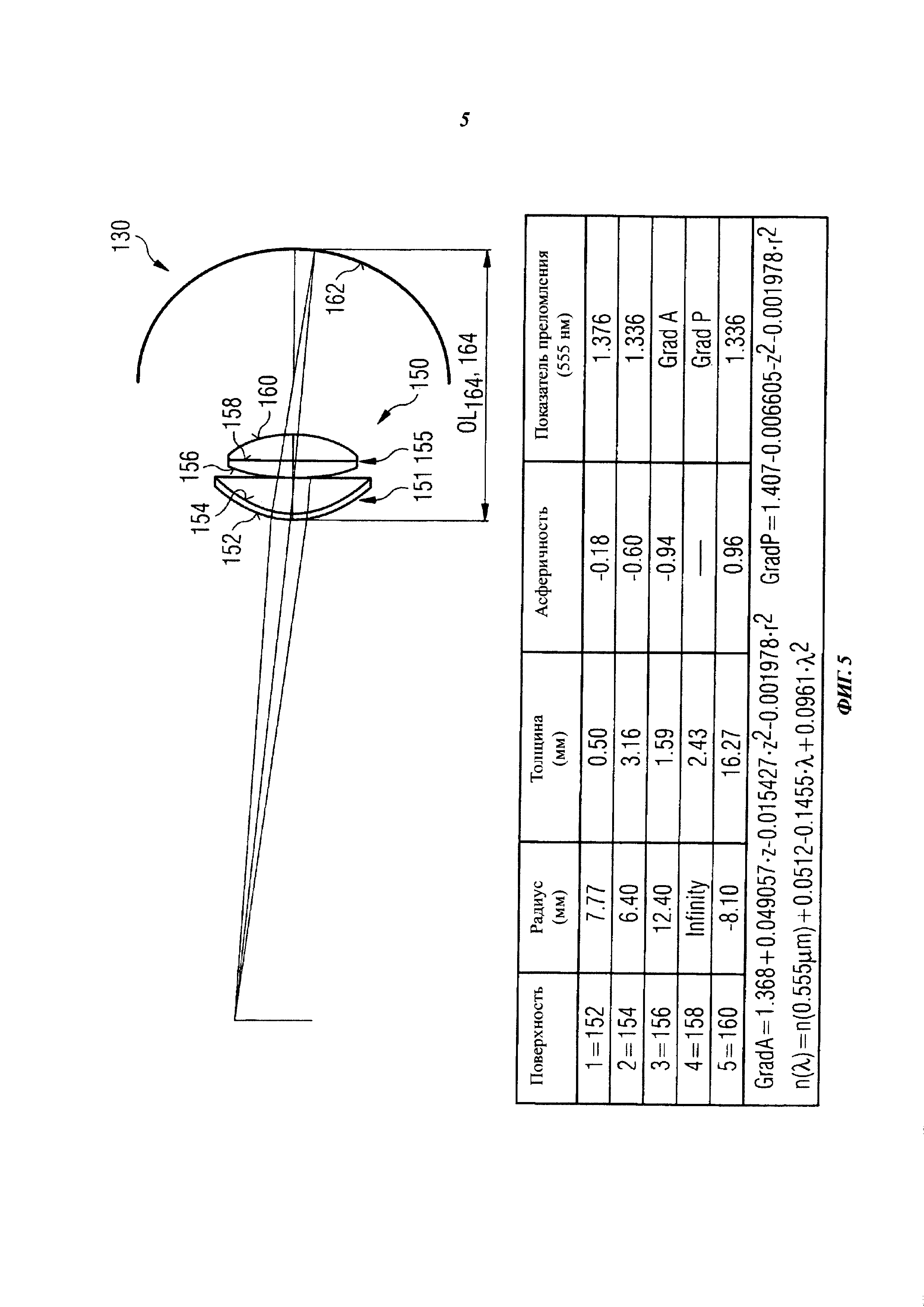
на фиг. 5 схематично изображена модель глаза по Лиу и Бреннану, причем в верхней части фиг. 5 показана геометрическая конфигурация оптических элементов модели глаза, а в ее нижней части, в таблице, приведены численные значения оптических свойств оптических элементов;
на фиг. 6 схематично проиллюстрированы пример проекции (сгенерированной посредством безаберрационной модели) составляющих пучков, образующих регулярную двумерную конфигурацию, посредством которой генерируется идеальный пленарный волновой фронт, и реальный волновой фронт, сгенерированный проецированием тех же самых составляющих пучков при наличии ошибок изображения (аберраций), а также определение аберраций волнового фронта как расхождений между реальным и идеальным волновыми фронтами;
на фиг. 7 схематично изображен пример траектории пучка из аберрометра по фиг. 2 внутри глаза (на роговице и сетчатке) при установленной перед глазом линзе аберрометра;
на фиг. 8 схематично проиллюстрирован пример траектории пучка из аберрометра по фиг. 2 внутри глаза с высокой степенью миопичности (на роговице и сетчатке) в отсутствие линзы аберрометра;
на фиг. 9 схематично изображен пример конфигурации улучшенной, индивидуализированной модели глаза, построенной на базе данных измерений, и световые пучки, построенные в процессе итеративной оптимизации, основанной на построении хода оптических лучей;
на фиг. 10 схематично иллюстрируется пример процесса индивидуализации для улучшенной модели глаза по фиг. 9, в котором после учета измерений топографий передней и задней поверхностей роговицы, а также толщины роговицы, глубины передней камеры, толщины хрусталика и длины глаза производится оптимизация внутриглазной оптической поверхности, такой как, например, передняя сторона хрусталика, до тех пор пока моделируемый волновой фронт, генерируемый глазом, не станет соответствовать аберрациям волнового фронта, определенным посредством аберрометра по фиг. 2; при этом усовершенствованный способ оптимизации осуществляется в итеративном режиме с обеих сторон оптимизируемой поверхности;
на фиг. 11 представлен пример индивидуализированной модели глаза пациента после адаптации интраокулярных поверхностей (например передней стороны хрусталика, проиллюстрированной на фиг. 10), причем световые пучки, исходящие из сетчатки, проходят через весь глаз, так что перед улучшенной моделью глаза реконструированная аберрация волнового фронта совпадает с измеренной;
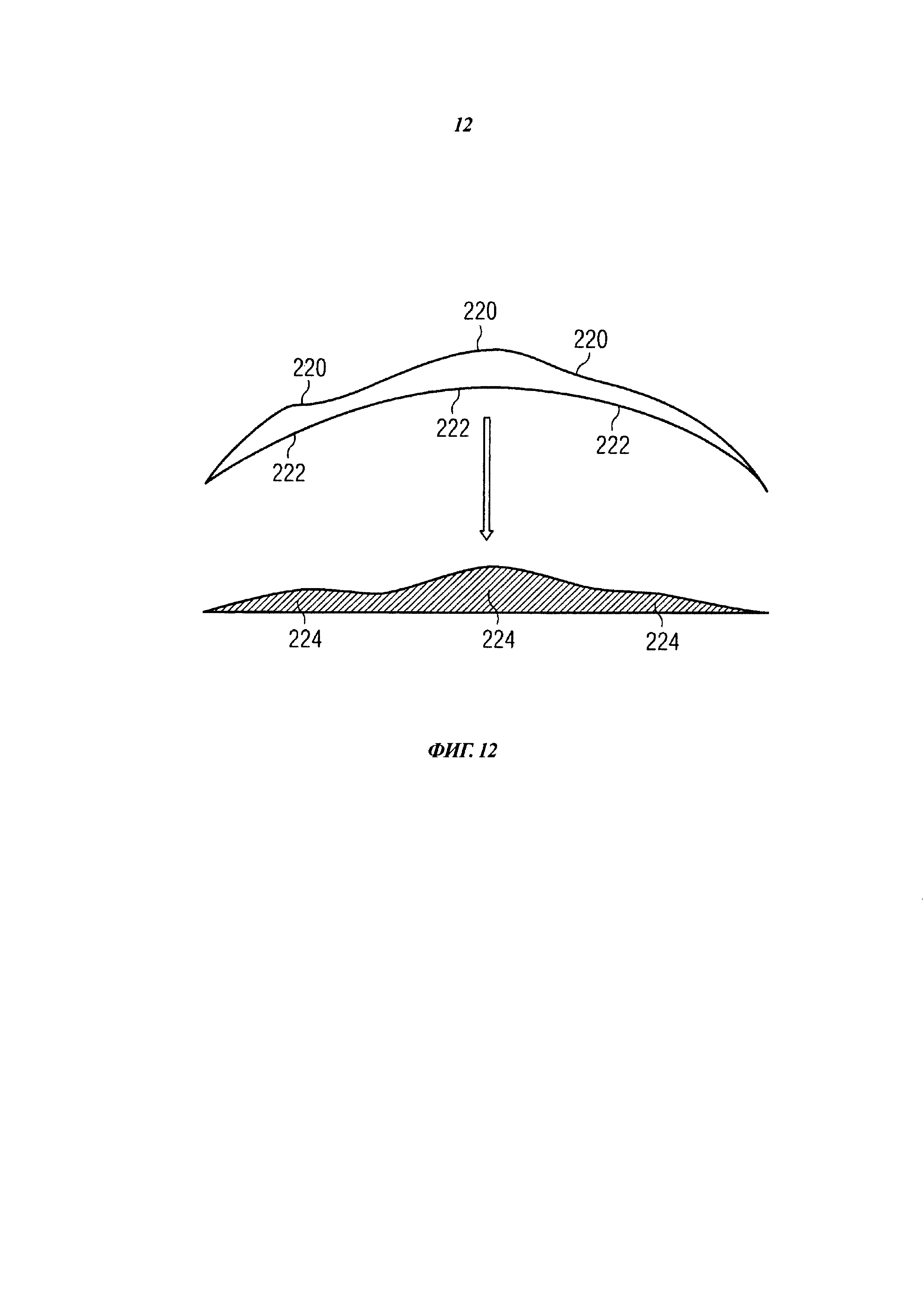
на фиг. 12 схематично иллюстрируется пример определения профиля абляции по разности между начальной топографией передней поверхности роговицы и ее рассчитанной идеальной передней поверхностью;
на фиг. 13 схематично проиллюстрирован пример оптимизации передней стороны интраокулярной линзы путем задания целевого волнового фронта, который может быть выведен из уточненных аберраций волнового фронта, определенных посредством аберрометра по фиг. 2.
Осуществление изобретения
На фиг. 1 иллюстрируется оптический принцип аберроскопа (предложенный Чернингом), например, применительно к варианту для клинического использования по фиг. 2, имеющего первую оптическую ось 20, соответствующую, например, визуальной оси глаза 12, и вторую оптическую ось 52 (ось офтальмоскопа). На фиг. 1 и 2 оптическая система 30 глаза 12, содержащая роговицу и хрусталик, схематично изображена в виде активного оптического элемента. Аберроскоп содержит линзу 28 аберроскопа, первое полупрозрачное зеркало 56 и линзу 58 офтальмоскопа. Множество индивидуальных тонких параллельных световых пучков, которые на фиг. 1 показаны падающими слева и которые формируют регулярную двумерную матрицу в плоскости, перпендикулярной первой оптической оси 20, фокусируют на глаз 12 посредством линзы 28 аберроскопа с относительно низкой преломляющей способностью, установленной перед глазом 12 так, что в нем образуется интраокулярная фокальная точка 36, расположенная на заданном расстоянии 38 перед сетчаткой 40 глаза 12. Посредством линзы 28 аберроскопа регулярную двумерную конфигурацию составляющих пучков 22, 22-1, … 22-5 проецируют через оптическую систему 30 глаза на сетчатку 40 и формируют на ней первый паттерн 116 точек, состоящий из индивидуальных первых проекций 117 составляющих пучков 22.
Первый паттерн 116 точек, проецируемый на сетчатку 40, может субъективно восприниматься пациентом. Пациент может записать, субъективно и по меньшей мере качественно, контур воспринятого им паттерна световых точек. Воспринятый паттерн световых точек в отношении конфигурации световых точек отличается от регулярной формы регулярной двумерной конфигурации составляющих пучков 22-1, … 22-5, падающих слева (в расположении по фиг. 1 и 2), поскольку проецирование через оптическую систему 30 глаза искажается вследствие ошибок изображения (аберраций).
Два верхних составляющих пучка 22-1 и 22-2 (изображенные на фиг. 1 штриховыми линиями) соответствуют идеальному проецированию через оптическую систему 30 глаза, без каких-либо монохроматических оптических аберраций. Эти "идеально" спроецированные составляющие пучки 22-1 и 22-2 проходят через фокальную точку 36 проекции. Два составляющих пучка 22-4 и 22-5 (на фиг. 1 нижние) иллюстрируют ситуацию, в которой оптическая система 30 глаза обладает аберрациями. Эти составляющие пучки 22-4 и 22-5 проецируемые с ошибками изображения, проходят через участки с различной преломляющей способностью, зависящей от положения точки их пересечения с оптической системой 30 глаза. Световые точки, т.е. проекции 117 составляющих пучков 22, спроецированные на сетчатку 40 с ошибками изображения и формирующие, в совокупности, первый паттерн 116 точек, отклоняются, посредством непрямой офтальмоскопии с помощью первого полупрозрачного зеркала 56, от первой оптической оси 20 (т.е. визуальной оси глаза) в направлении второй оптической оси 52 и проецируются, с использованием линзы 58 офтальмоскопа и узкого оптического канала 66, заданного диафрагмой 64 (см. также фиг. 2), на вторую плоскость 54, находящуюся вне глаза и расположенную, по существу, перпендикулярно второй оптической оси 52.
Как показано на фиг. 3, для регистрации второй проекции 119, полученной в результате офтальмоскопического проецирования на вторую плоскость 54, используется датчик изображения в составе устройства 60 для регистрации изображений.
В глазу с идеальными оптическими свойствами, т.е. не имеющем никаких оптических аберраций, субъективно воспринимаемый паттерн точек будет иметь ту же самую двумерную регулярность, что и у составляющих пучков 22-1, … 22-5 (показанных на фиг. 1 идущими слева и падающими на линзу 28 аберроскопа). Применительно к глазу 12 пациента, которому присущи ошибки изображения (оптические аберрации), первый паттерн 116 световых точек, сформированный на сетчатке 40, будет в большей или меньшей степени искажен вследствие указанных ошибок (аберраций) оптической системы 30 глаза 12.
Чтобы провести количественные измерения искажений первого паттерна 116 световых точек, сформированного на сетчатке 40, регистрируют положения сформированных на сетчатке 40 индивидуальных первых проекций 117 индивидуальных составляющих пучков 22-i (i=1, … 5) (так называемых световых точек на сетчатке) и определяют их смещение относительно безаберрационной проекции. С этой целью первый паттерн 116 точек, сформированный на сетчатке 40, проецируют, посредством офтальмоскопического устройства 50, содержащего первое полупрозрачное зеркало 56 и первую линзу 58 офтальмоскопа, на вторую плоскость 54, находящуюся вне глаза 12. Вторая плоскость 54 является, например, плоскостью изображения датчика устройства 60 для регистрации изображений, например видеокамеры. В результате во второй плоскости 54 образуется второй паттерн 118 точек, соответствующий вторым проекциям 119, формируемым линзой 58 офтальмоскопа (см. центральное и правое изображения на фиг. 3) путем переноса первых проекций 117 (световых точек), находящихся на сетчатке 40, т.е. первого паттерна 116 точек. В изображении второго паттерна 118 точек, зарегистрированного во второй плоскости 54, с использованием компьютерной программы обработки изображений определяют координаты геометрически средних точек второй проекции 119.
Искажение второго паттерна 118 точек по отношению к исходной регулярной двумерной конфигурации 26 составляющих пучков 22-1, … 22-5 (см. левое изображение на фиг. 3) может быть описано количественно. С этой целью для каждой световой точки - т.е. для каждой проекции 119 световой точки 117 (для каждой точки первого паттерна 116 на сетчатке) - определяют ее смещение 124 относительно "идеальной" световой точки 132, ассоциированной с тем же составляющим пучком и полученной в безаберрационных условиях. Форма конфигурации идеальных световых точек 132 соответствует форме двумерной конфигурации 26 составляющих пучков. Для идеальных световых точек 132 вычисляют координаты применительно к принимаемому случаю свободного от ошибок изображения (безаберрационного) проецирования конфигурации 26 составляющих пучков оптической системой со средней сферической рефракцией, эквивалентной установленной для оптической системы 30. В результате преломления идеальная световая точка 132 во второй плоскости 54 ассоциируется с каждым составляющим пучком 22 двумерной конфигурации 26 составляющих пучков, направляемых в аберрометр. Во второй плоскости 54 (в плоскости изображения) задают ортогональную систему координат с двумя взаимно перпендикулярными осями x и y (см. центральное и правое изображения на фиг. 3). Соответственно, смещение 124 каждой второй проекции 119 относительно координат ассоциированной с ней идеальной световой точки 132 представляют, как векторную сумму смещения 126 в x-направлении и смещения 128 в y-направлении (см. увеличенную зону изображения в нижней части фиг. 3).
Представленный на фиг. 2 вариант оптического аберрометра (устройства 10) основан на аберрометрии Чернинга, проиллюстрированной на фиг. 1. Устройство 10 для определения оптических аберраций человеческого глаза 12, разработанное для клинических приложений, содержит источник 14 света для генерирования параллельного светового пучка 16, устройство 18 для формирования из светового пучка 16 множества составляющих пучков 22, образующих двумерную конфигурацию 26 (см. фиг. 3), линзу 28 аберроскопа для проецирования конфигурации 26 через оптическую систему 30 глаза 12 и формирования, тем самым, на сетчатке 40 глаза первого паттерна 116 точек, офтальмоскопическое устройство 50 для проецирования первого паттерна 116 точек на сетчатке на вторую плоскость 54 (находящуюся вне глаза) и формирования, тем самым, второго паттерна 118 точек, а также компьютер 98 с арифметическим блоком.
Источник 14 света содержит лазер 70, который генерирует лазерный пучок 74, управляемый затвор 73 для включения/отключения или модулирования лазерного пучка 74, коллиматор 76 для расширения лазерного пучка 74 с формированием расширенного параллельного светового пучка 16. Лазер 70 является лазерным диодом, испускающим пучок излучения в красной области (около 660 нм) с диаметром около 2 мм при выходной мощности около 10 мВт. Лазерный пучок 74 управляется посредством электромеханического затвора 73, обеспечивающего время открывания в интервале примерно 10-100 мс, например 60 мс. Коллиматор 76 построен с использованием схемы, основанной на принципе телескопа 78 Кеплера, который расширяет лазерный пучок до диаметра около 25 мм и содержит фильтр пространственных частот (не изображен) с диаметром 15 мкм. Для формирования составляющих пучков 22 служит устройство 18 в виде маски 19 с набором окон. Множество выполненных в маске 19 окон размещены в ней в виде регулярной двумерной конфигурации. Таким образом, в первой плоскости 24, заданной устройством 18 (маской 19) и расположенной, по существу, перпендикулярно первой оптической оси 20 (т.е. визуальной оси глаза), сформирован показанный в левой части фиг. 3 паттерн точек в форме матрицы. Соответственно, диаметр составляющего пучка 22 ограничен диаметром индивидуального окна в маске 19, которое в устройстве 18 составляет примерно 0,2-0,5 мм, например примерно 0,33 мм. Маска 19 выполнена в виде фотопленки. Она является сменной, т.е. имеется несколько различных масок. Тем самым гарантируется, что для каждой из набора взаимозаменяемых линз 28 аберроскопа (как это будет пояснено далее) имеется соответствующая маска 19; в результате между составляющими пучками 22 на передней стороне роговицы 32 обеспечивается заданное расстояние, примерно равное 0,6 мм. Маски 19 различаются в отношении расстояния между точками (окнами). При этом двумерные конфигурации в различных масках 19 конгруэнтны одна другой.
В некоторых вариантах линза 28 аберроскопа является сменной, т.е. имеется набор различных линз аберроскопа с различными значениями преломляющей способности. На практике может оказаться полезным смещать линзу аберроскопа; однако, могут использоваться и взаимозаменяемые линзы аберроскопа с различными значениями преломляющей способности, зависящими от средней сферической преломляющей способности глаза. Из условия, что интраокулярная фокальная точка 36 должна находиться перед сетчаткой, на заданном расстоянии 38 от нее, следует, что преломляющая способность линзы 28 аберроскопа должна зависеть от средней сферической преломляющей способности оптической системы 30 (роговицы и хрусталика) глаза 12. В случае эметропического глаза преломляющую способность линзы 28 выбирают в интервале примерно от +4D до +5D. Для гиперметропического глаза с преломляющей способностью более +2D используют линзу 28 аберроскопа с преломляющей способностью более +5D. Назначение линзы 28 аберроскопа состоит в обеспечении того, чтобы первый паттерн 116 точек, формируемый на сетчатке 40, всегда имел одинаковый размер, такой, при котором индивидуальные световые точки 117 отделены одна от другой и являются легко идентифицируемыми. Размер первого паттерна 116 точек на сетчатке составляет около 1 мм2.
Правильное положение глаза 12, в котором его визуальная ось совмещена с первой оптической осью 20 совокупности составляющих пучков 22-1, … 22-5, генерируемых источником 14 света, обеспечивается посредством юстировочного устройства 80, работающего в ближней инфракрасной (ИК) области. Юстировочное устройство 80 содержит два светодиода (не изображены), испускающих в ближней ИК области (длина волны излучения около 880 нм), которые согласованы с положением глаза по вертикали. Глаз 12 наблюдается через устройство, также функционирующее в ИК диапазоне. Данное устройство содержит второе полупрозрачное зеркало 86, обладающее частичным отражением в ИК диапазоне, второе регистрирующее устройство 90, функционирующее в ИК диапазоне и снабженное видеокамерой 92 с ПЗС-датчиком (не изображен), чувствительным в ИК диапазоне. Второе полупрозрачное зеркало 86 расположено, по существу, диагонально по отношению к первой оптической оси 20, под углом примерно 45° к устройству 18, формирующему составляющие пучки, и к линзе 28 аберроскопа. ПЗС-датчик находится в третьей плоскости 84, расположенной, по существу, перпендикулярно к третьей оптической оси 82, отклоненной вторым полупрозрачным зеркалом 86. Применительно к ИК излучению зеркало 86 отклоняет первую оптическую ось 20 (например визуальную ось глаза 12) на вторую линзу 88 офтальмоскопа, установленную на третьей оптической оси 82, которая представляет собой ИК линзу 89 (т.е. линзу, прозрачную в ИК диапазоне), и на ИК полосовой фильтр 94, согласованный с частотой излучения, испускаемого источниками ИК излучения. Фильтр 94 установлен на третьей оптической оси 82 между вторым полупрозрачным зеркалом 86 и второй линзой 88 офтальмоскопа (т.е. ИК линзой 89) с целью блокирования света в видимом спектральном диапазоне.
С помощью юстировочного устройства 80 и зеркала 86 глаз наблюдают через линзу 28 аберроскопа и исходную апертуру аберроскопа. Второе полупрозрачное зеркало 86, линзу 88 и второе регистрирующее устройство 90 юстируют и фиксируют относительно первой оптической оси 20 светового пучка 16, формируемого коллиматором 76, таким образом, что третья оптическая ось 82 совпадает с первой оптической осью 20, перенесенной зеркалом 86. Затем находят правильное положение глаза 12 и фиксируют его в данном положении, если узкий световой пучок от щелевой лампы и исходная апертура аберроскопа на мониторе, на который подается ИК изображение, зарегистрированное вторым регистрирующим устройством 90, будут центрированы на зрачке глаза 12, отображаемом на мониторе. Голову пациента фиксируют в соответствии с правильно выбранным положением глаза 12 на известном из уровня технике подбороднике (не изображен) с помощью известной опоры для лба (также не изображена).
Первый паттерн 116 точек, сформированный совокупностью составляющих пучков 22 на сетчатке 40 глаза 12, регистрируют посредством первого офтальмоскопического устройства 50. Офтальмоскопическое устройство 50 содержит первое полупрозрачное зеркало 56, установленное на первой оптической оси 20, по существу, диагонально, т.е. под углом примерно 45° к линзе 28 аберроскопа и исходной апертуре 27 аберроскопа, первую линзу 58 офтальмоскопа, диафрагму 64, и, в качестве первого регистрирующего устройства 60, ПЗС-камеру 62 с ПЗС-датчиком. Плоскость изображения датчика соответствует второй плоскости 54, на которую проецируется второй паттерн 118 точек, формируемый линзой 58 офтальмоскопа как изображение первого паттерна 116 точек, сформированного на сетчатке посредством проецирования через оптическую систему 30 глаза 12. В некоторых вариантах траекторию пучка (вторую оптическую ось 52) отклоняют посредством отклоняющего зеркала 69. Взаимные положения первого регистрирующего устройства 60 (ПЗС-камеры 62), линзы 58 офтальмоскопа и отклоняющего зеркала 69 зафиксированы, чтобы зафиксировать положение второй оптической оси 52 офтальмоскопического устройства 50. Положение или ориентацию офтальмоскопического устройства 50 или второй оптической оси 52 относительно первого полупрозрачного зеркала 56 регулируют таким образом, чтобы первая оптическая ось 20, отклоненная зеркалом 56, совпадала со второй оптической осью 52 офтальмоскопического устройства 50.
Офтальмоскопическое устройство 50 содержит диафрагму 64, установленную непосредственно перед линзой 68 камеры. Открывание диафрагмы задает оптический канал 66. Этот канал 66 может иметь малый диаметр и может быть задан как непосредственно примыкающий к первой оптической оси 20 (например визуальной оси глаза 12) и проходящий вдоль нее. Канал 66 задает вторую оптическую ось 52 офтальмоскопического устройства 50, отклоненную соответствующим образом зеркалом 56. Малый диаметр оптического канала 66 перекрывает только соответственно малую осевую зону оптической системы 30 глаза 12, так что офтальмоскопическая проекция может рассматриваться как, по существу, свободная от ошибок изображения.
Линза 58 офтальмоскопа проецирует, совместно с линзой 68 камеры (фокусное расстояние которой равно, например, 30 мм), сформированный на сетчатке первый паттерн 116 точек по узкому оптическому каналу 66 на ПЗС-датчик (с размерами, например, 12,8 мм × 9,6 мм) видеокамеры 62 (например камеры LH 750LL фирмы Lheritier S.A., Cergy Pontoise, Франция, или Watec WAT-902H2). Положение камеры можно регулировать с целью инспекции, с учетом преломляющей способности глаза 12, различных частей сформированного на сетчатке промежуточного изображения (первого паттерна 116 точек). При регистрации второго паттерна 118 точек никакой оптической коррекции оптической системы 30 глаза не производится.
Изображение второго паттерна 118 точек, зарегистрированное первым регистрирующим устройством 60, передается на компьютер 98 и визуализируется для оперирующего хирурга на мониторе (не изображен) компьютера 98, а также записывается в компьютер.
В компьютер 98 загружена программа обработки изображения, используемая для определения координат геометрически центральных точек всех вторых проекций 119 (световых точек) второго паттерна 118 точек, которые возникают в результате офтальмоскопического проецирования первых проекций 117 (световых точек на сетчатке) первого паттерна 116 точек. Как уже упоминалось, координаты "идеальных" световых точек 132, которые были бы сформированы во второй плоскости 54 при безаберрационных условиях, вычисляются на основе безаберрационной модели 130 глаза. В соответствии с некоторыми вариантами вместо длины глаза, принимаемой в модели глаза, используется действительная длина глаза 12, например измеренная биометрически. Конфигурация идеальных световых точек 132, по существу, такая же, как регулярная двумерная конфигурация 26, формируемая устройством 18 (маской 19) применительно к составляющим пучкам: по сравнению с конфигурацией 26 она просто пропорционально увеличена по размерам.
Действительная длина 198 глаза (OL) (см. фиг. 1, 2, 9 и 10) измеряется непосредственно для глаза 12 пациента лазерно-интерферометрическим методом. Для этой цели подходит, например, вышеупомянутый прибор WaveLight OB 820. Этот прибор, помимо определения длины 198 глаза (OL), пригоден также для исследования других биометрических длин, задаваемых вдоль первой оптической (например визуальной) оси глаза, например толщины 192 роговицы (СТ), глубины 194 передней камеры (ACD), толщины 196 хрусталика (LT) и/или положения передней или задней стороны хрусталика.
В качестве модели глаза может быть использована модель 140 глаза по Гульстранду (Gullstrand model), схематично представленная на фиг. 4, или модель 150 глаза по Лиу и Бреннану (Liou-Brennan model), схематично представленная на фиг. 5. Применимы и другие модели глаза. Для облегчения понимания далее будет рассмотрен вариант изобретения на базе модели Гульстранда. Для других моделей глаза использование реально измеренной длины глаза предусматривается параметрами самой модели глаза.
В модели Гульстранда человеческий глаз апроксимируется структурой, схематично изображенной в верхней части фиг. 4. Здесь реальная оптическая система человеческого глаза, состоящая из взаимно смещенных вдоль оси роговицы и хрусталика, моделируется системой, состоящей из выпукло-вогнутой фронтальной линзы 141 с передней стороной (первой поверхностью) 142 и задней стороной (второй поверхностью) 144 и двояковыпуклой задней линзы 143, смещенной относительно фронтальной линзы 141 назад, в направлении модели 148 сетчатки, и имеющей заднюю сторону (третью поверхность) 146. Передняя сторона задней линзы 143 имеет тот же радиус кривизны, что и задняя сторона 144 фронтальной линзы 141 и совмещена с этой стороной. Задняя сторона 146 задней линзы 143 расположена перед моделью 148 сетчатки, моделируемой планарной поверхностью, и расположена от нее на расстоянии, рассчитанном по средним значениям для реальных глаз. Как указано в таблице, приведенной в нижней части фиг. 4, в модели 140 Гульстранда радиусы кривизны первой поверхности 142, второй поверхности 144 и третьей поверхности 146 принимаются равными 7,8 мм, 10,0 мм и -6,0 мм соответственно. Толщина фронтальной линзы 141, измеряемая по оптической оси модели глаза, принимается равной 3,6 мм, а ее показатель преломления - равным 1,3358 (с округлением до 1,336). Из таблицы на фиг. 4 видно также, что толщина задней линзы 143 принята равной 3,6 мм, ее показатель преломления принят равным 1,413, расстояние от вершины поверхности 146 задней линзы до модели 148 сетчатки принято равным 16,97 мм, а показатель преломления в этой зоне - равным 1,3358 (с округлением до 1,336).
В соответствии с некоторыми вариантами в качестве длины 149 глаза (OL149), измеряемой в модели от вершины передней стороны (например первой поверхности 142) фронтальной линзы 141 до модели 148 сетчатки, принимается значение, которое соответствует действительной длине (OL) 198 глаза, измеренной для глаза, подлежащего аберрометрическому исследованию. Таким образом, расстояние от вершины задней стороны (т.е. второй поверхности 146) задней линзы 143 до модели 148 сетчатки выбирается, с отклонением от значения, указанного в таблице на фиг. 4, таким, чтобы модель длины глаза соответствовала измеренной (действительной) длине глаза.
С другой стороны, в модели 150 Лиу и Бреннана оптическая система глаза, как показано на фиг. 5, моделируется, в соответствии с реальным положением, выпукло-вогнутой фронтальной линзой 151 с передней стороной (т.е. с первой поверхностью) 152 и с задней стороной (т.е. со второй поверхностью) 154, которые совместно моделируют роговицу, и расположенной за фронтальной линзой 151 двояковыпуклой задней линзой 155 с передней стороной (т.е. с третьей поверхностью) 156, с планарной главной плоскостью (т.е. с четвертой поверхностью) 158 и с задней стороной (т.е. с пятой поверхностью) 160, а также моделью 162 сетчатки, имеющей сферическую форму. Оптические свойства оптических элементов модели 150 Лиу и Бреннана просуммированы в таблице, приведенной в нижней части фиг. 5. Радиусы кривизны поверхностей 152, 154, 156, 158 и 160 (с первой по пятую) составляют 7,77 мм, 6,40 мм, 12,40 мм, ∞ и -8,10 мм соответственно. Приведенные в таблице толщины для стандартной модели Лиу и Бреннана соответствуют значениям по оптической оси модели 150 глаза и составляют 0,50 мм (расстояние от первой поверхности 152 до второй поверхности 154); 3,16 мм (расстояние от второй поверхности 154 до третьей поверхности 156), 1,59 мм (расстояние от третьей поверхности 156 до четвертой поверхности 158), 2,43 мм (расстояние от четвертой поверхности 158 до пятой поверхности 160) и 16,27 мм (расстояние от пятой поверхности 160 до модели 162 сетчатки). При этом первая, вторая, третья и пятая поверхности 152, 154, 156 и 160 обладают асферичностью. Показатель преломления области между первой поверхностью 152 и второй поверхностью 154 равен 1,376; области между второй поверхностью 154 и третьей поверхностью 156 равен 1,336; области между пятой поверхностью 160 и моделью 162 сетчатки равен 1,336. Показатели преломления модели для задней линзы (хрусталика), т.е. в области между третьей поверхностью 156 и четвертой поверхностью 158 и в области между четвертой поверхностью 158 и пятой поверхностью 160 зависят от Z-положения, измеряемого по оптической оси, и от расстояния R от оптической оси модели 150 глаза, причем эти зависимости заданы в таблице на фиг. 5 выражениями "Grad А" и "Grad Р". Дисперсия (зависимость от длины волны) показателей преломления моделируется в модели Лиу и Бреннана уравнением для n(λ), приведенным в нижней строке таблицы на фиг. 5.
В соответствии с некоторыми вариантами расстояние между поверхностью 160 задней линзы (пятой поверхностью) и сетчаткой выбирается таким образом, чтобы модельная длина 164 глаза (OL164), измеряемая по оптической оси от вершины первой поверхности 152 до модели 162 сетчатки, соответствовала действительной длине глаза 12, подлежащего аберроскопическому исследованию.
Далее, со ссылками на фиг. 6-8, рассматривается способ согласно определенным вариантам расчета аберраций 100 волнового фронта оптической системы глаза. Согласно этим вариантам составляющий пучок 22-1 проецируется линзой 28 аберроскопа и оптической системой 30 глаза на сетчатку 40. Как это можно видеть из фиг. 7, составляющий пучок 22-1, исходящий от устройства 18 для формирования составляющих пучков, сначала распространяется параллельно первой оптической (т.е. визуальной) оси 20 глаза 12, затем проходит через линзу 28 аберроскопа; при этом он дополнительно преломляется в направлении оптической оси 20 на угол α28. Далее составляющий пучок 22-1 проходит через оптическую систему 30 глаза и при этом дополнительно отклоняется в направлении оптической оси, так что после прохождения через оптическую систему 30 он образует с осью 20 угол α30. Затем световой пучок 22-1 падает на сетчатку 40 в виде проекции 117. Точка пересечения светового пучка 22-1 с оптической системой 30 отстоит от первой оптической оси на расстояние Н030 (см. фиг. 6-8). Точка падения проекции 117 составляющего пучка 22-1 на сетчатку 40 отстоит от первой оптической оси на расстояние Н40, подлежащее измерению (см. фиг. 6-8).
Если бы оптическая система 30 глаза была свободна от ошибок изображения (аберраций), составляющий пучок 22-1 преломлялся бы оптической системой 30 в направлении первой оптической оси 20 под другим (в примере по фиг. 6 и 7 меньшим) углом, т.е имел бы траекторию пучка 23-1 (изображенную на фиг. 6 и 7 штриховой линией) и падал бы на сетчатку на расстоянии Н040 от первой оптической оси 20. Расстояние на сетчатке 40 между точкой падения (на расстоянии Н40 от оптической оси) составляющего пучка 22-1, прошедшего оптическую систему 30 глаза, имеющую аберрацию, и точкой падения (на расстоянии Н040 от оптической оси) составляющего пучка 23-1, испытавшего преломление в идеальной, безаберрационной системе, составляет смещение, подлежащее измерению.
Смещение (расстояние) во второй плоскости 54, находящейся вне глаза 12, т.е. в плоскости изображения регистрирующего устройства 60 (ПЗС-камеры 62), измеряют так, как это было описано со ссылкой на фиг. 3. Увеличение в результате офтальмоскопического проецирования сетчатки 40 на вторую плоскость 54 (проекционное увеличение) обозначено на фиг. 3 и в приводимых далее уравнениях символом V. Отмеченное на фиг. 6 и 7 смещение на сетчатке 40 между точками падения составляющего пучка 22-1, проецируемого при наличии аберраций (проекция 117), и составляющим пучком 23-1, проецируемым безаберрационным образом, формально обозначено на фиг. 6 и 7, как смещение 124 (показанное на фиг. 3 и измеряемое во второй плоскости 54, т.е. в плоскости изображения регистрирующего устройства 60) между второй проекцией 119 составляющего пучка 22-1, проецируемого на сетчатку в случае наличия аберраций, и проекцией 132 составляющего пучка 23-1, проецируемого на сетчатку безаберрационным образом (см. фиг. 6 и 7), деленное на проекционное увеличение V, обеспечиваемое офтальмоскопическим проецированием. В представленном в нижней части фиг. 3 в увеличенном масштабе участке второго паттерна 118 точек, сформированного во второй плоскости 54, расстояние 124 между проекцией 132 составляющего пучка 23-1, проецируемого безаберрационным образом, и второй проекцией 119 составляющего пучка 22-1, проецируемого в случае наличия аберраций, определяется как расстояние между точками падения на сетчатку 40 (см. фиг. 6 и 7), т.е. расстояние от точки Н40 до точки Н040, умноженное на проекционное увеличение V, обеспечиваемое офтальмоскопическим проецированием.
Аберрация волнового фронта глаза может быть определена по изменению угла для каждого составляющего пучка 22-1, … 22-5 при прохождении через оптическую систему 30 глаза. Как уже упоминалось, посредством аберроскопического проецирования на сетчатке 40 формируется первый паттерн 116 точек, который в безаберрационном случае представлялся бы неискаженным (т.е. не имеющим смещений) относительно регулярной двумерной конфигурации 26, формируемой на сетчатке 40 составляющими пучками, образованными устройством 18. В случае эметропического глаза в результате аберроскопического проецирования через оптическую систему 30 глаза составляющие пучки 22-1, … 22-5 должны давать на сетчатке резкие изображения в виде точек. При этом, вследствие введения линзы 28 аберроскопа, для каждого составляющего пучка 22-1, … 22-5 обеспечивается смещение Н40 сформированной на сетчатке проекции (световой точки) относительно первой оптической (т.е. визуальной) оси 20 глаза. Расстояние Н40 может быть рассчитано согласно следующему уравнению (1):

Использованные в уравнении (1) обозначения соответствуют:
Н040 расстоянию, на сетчатке 40, от точки 117 падения до первой оптической оси 20, обусловленному присутствием линзы 28 аберроскопа,
Н030 расстоянию от точки пересечения соответствующего составляющего пучка, например пучка 22-1, с оптической системой 30 до первой оптической оси 20,
f28 фокусному расстоянию линзы 28 аберроскопа,
D29 расстоянию между линзой аберроскопа и передней поверхностью глаза,
OL длине глаза.
До того как были разработаны приборы, предназначенные для измерения длин и глубин (включая длину глаза), длина глаза (OL) не поддавалась измерению. Поэтому в уравнении (1) она принималась примерно равной предварительно измеренному, специфичному для индивидуального глаза сферическому эквиваленту Dr:

Уравнение (2) справедливо только для упрощенной модели 140 Гульстранда. Использованные в уравнении (2) обозначения соответствуют:
OL149 длине глаза в упрощенной модели Гульстранда, принимаемой равной 22,36 мм,
D140 преломляющей способности оптической системы в модели 140 Гульстранда и
n показателю преломления материала оптической системы в модели 140 Гульстранда.
Фактическое расстояние на сетчатке 40 для проекции 117 составляющего пучка 22-1, проецируемого через имеющую аберрации оптическую систему 30 глаза, может быть вычислено по расстояниям Н54 от второй оптической оси 52, измеренным во второй плоскости 54 для вторых проекций 119 в соответствии с уравнением:

Использованные в уравнении (3) обозначения соответствуют:
Н40 расстоянию от первой проекции 117 составляющего пучка 22-1, проецируемого при наличии аберраций на сетчатку 40 глаза, до первой оптической (например визуальной) оси 20,
Н54 расстоянию от проекции 119 на вторую плоскость 54, т.е. на плоскость изображения офтальмоскопической проекции в регистрирующем устройстве 60, до второй оптической оси 52,
V коэффициенту увеличения офтальмоскопической проекции сетчатки на вторую плоскость 54,
HPix расстоянию от второй проекции 119 на вторую плоскость 54 до второй оптической оси 52 (измеренному в пикселях ПЗС-камеры 62),
ПЗС-размеру ПЗС-датчика камеры 62 (выраженному в мм),
ПЗС-Pix разрешению ПЗС-датчика камеры 62 (выраженному в пикселях).
Из уравнений (1) и (3) находятся координаты (Н30) точки пересечения составляющего пучка с оптической системой 30 глаза, заданные линзой 28 аберроскопа, координаты (Н040: расстояние от оптической оси) точки падения составляющего пучка 23-1 на сетчатку 40 в безаберрационной ситуации и координаты (Н40: расстояние от оптической оси) фактической точки 117 падения составляющего пучка 22-1 на сетчатку 40, определяемые по офтальмоскопической проекции на вторую плоскость 54 (см. фиг. 3 и 7).
Как это понятно из фиг. 7, по найденным значениям Н030, Н040 и Н40 можно рассчитать углы между составляющими пучками и первой оптической осью 20 в плоскости оптической системы 30 (роговицы 32):

Использованные в уравнениях (4) и (5) обозначения соответствуют:
α28 углу для составляющего пучка 22-1, имеющему место в результате преломления в линзе 28 аберроскопа,
α30 углу, имеющему место в результате преломления в линзе 28 аберроскопа и преломления в оптической системе 30 глаза.
Подстановка уравнения (1) приводит к следующему упрощению уравнения (5):

Для глаза с высокой степенью миопичности не может быть использована никакая линза 28 аберроскопа. Применительно к этому случаю в уравнениях (1)-(5) α28=0, так что траектория пучка, показанная на фиг. 7, упрощается до траектории, показанной на фиг. 8. Уравнение (6) справедливо и для этого случая.
Углы для составляющих пучков, обусловленные исключительно аберрациями оптической системы 30 глаза, определяются для двух случаев: эметропического глаза (фиг. 7) и глаза с высокой степень миопичности (фиг. 8) путем нахождения (посредством вычитания) разности углов α30 и α28. При этом приращение dW аберрации волнового фронта, т.е. ее изменение в зависимости от радиального расстояния точки пересечения с оптической системой 30 до первой оптической оси 20, равно тангенсу разностного угла:

При подстановке уравнений (4) и (6) в правую часть уравнения (7) можно видеть, что при расчете dW используются фокусное расстояние (f28) линзы 28 аберроскопа, расстояние (D29) от линзы 28 аберроскопа до передней поверхности глаза, длина (OL) глаза, координаты (xk, yk) точки пересечения составляющего пучка с оптической системой 30 глаза и координаты (Н40), определенные посредством аберроскопического измерения световых точек (фактических точек 117 падения составляющих пучков на сетчатку 40). Значения, используемые при расчетах dW, либо задаются оптической системой аберроскопа (т.е. устройства 10), либо могут быть рассчитаны по приведенным уравнениям (7), (6) и (4).
Далее, со ссылками на Таблицы 1-6, будет рассмотрено представление аберраций волнового фронта с использованием разложения по полиномам Цернике, т.е. представление аберрации 100 волнового фронта, вносимой оптической системой 30 глаза, как суммы полиномов Цернике, нормализованных к единичному кругу (единичной окружности) и взвешенных с использованием соответствующих полиномиальных коэффициентов Цернике.
В результате оценки полученного офтальмоскопическим проецированием второго паттерна 118 точек, зарегистрированного регистрирующим устройством 60, т.е. в результате измерений (проведенных для каждого учитываемого составляющего пучка) смещения 124 составляющего пучка 22-1 (который проецируется при наличии аберраций) относительно составляющего пучка 23-1 (который проецируется безаберрационным образом) получают массив m пар координат (xk, yk), где k=1, … m, для точек падения составляющих пучков 22-1, … 22-m, которые проецируются при наличии аберраций через оптическую систему глаза. В этом случае координаты (xk, yk) точек 119 падения отсчитываются от второй оптической оси 52, т.е. они являются относительными координатами. По этим координатам могут быть рассчитаны отклонения реконструированного реального (фактического) волнового фронта 102 относительно идеального, например планарного, волнового фронта 104, соответствующие аберрациям 100 волнового фронта, показанным на фиг. 6.
Аберрация волнового фронта может быть математически представлена через координаты (xk, yk) в плоскости изображения (второй плоскости 54) в форме, выбранной из соображений удобства описания. В частности, может быть использовано представление аберраций волнового фронта в виде суммы полиномов Цернике. В этом случае применяется следующая формула:

Использованные в уравнении (8) обозначения соответствуют:
W(xk,yk) аберрации 100 волнового фронта в виде двумерной функции, заданной в точках (xk, yk),
Zi(xk,yk) i-тому полиному Цернике, определенному в точке (xk, yk),
Сi коэффициенту Ci из коэффициентов (C1, … CN), подлежащему определению применительно к соответствующему полиному Цернике Zi,
N количеству полиномов Цернике, используемых при разложении суммы,
i индексу суммирования.
Полиномы Цернике описываются приводимыми далее уравнениями (19) и (20) в полярных координатах (r, ϕ); они рассчитываются алгебраически в соответствии с уравнениями (19) и (20) и приводятся (в полярных координатах) в Таблице 1 (см. Приложение, содержащее Таблицы 1-6).
Согласно определению полиномов Цернике, N принимает определенные значения, указанные в правом столбце Таблицы 3. При этом имеют смысл только разложения с целыми значениями n порядка полинома, причем только использование четных порядков, например n=2, 4, 6, 8, …. Так, включение в разложение, в дополнение к N=27 полиномам порядка n=6, также 28-ого или 29-ого полинома не внесет никакого полезного информационного вклада.
Однако, как было пояснено со ссылками на фиг. 6-8, при анализе паттерна 116 световых точек (первых проекций) 117, проецируемых на сетчатку 40, учитываются только приращения dW аберрации волнового фронта в точках (xk, yk), т.е. изменение аберрации волнового фронта с координатами в плоскости проекции, т.е. первые частные производные



и

Это означает, что по результатам определения смещений точек 117 падения в разложении Цернике для m пар координат (xk, yk) можно вывести два уравнения:

Стандартный метод решения уравнений для этой системы уравнений непригоден. Численная устойчивость численного решения подобных систем уравнений обеспечивается применением метода сингулярной декомпозиции.
Численное решение для данных систем уравнений можно рассчитать только тогда, когда количество точек измерения (xk, yk), или узлов интерполяции, по меньшей мере такое же, что и количество полиномов Цернике (которые в этом случае являются неизвестными):

Как было упомянуто, в уравнении (12) m означает количество точек измерения, а N - количество полиномов Цернике, включенных в разложение суммы.
Соответственно, выражение (12) указывает, что порядок полиномов Цернике, который может быть принят во внимание, зависит от количества световых точек 117, которые могут быть проанализированы в изображении, формируемом на сетчатке аберроскопическим методом.
Например, применительно к описанному выше и показанному на фиг. 2 устройству 10 (в виде маски 19) для формирования составляющих пучков и зрачку диаметром 6 мм теоретически имеется 68 точек измерений, т.е. пар координат (см. левое изображение на фиг. 3), так что разложение с использованием полиномов Цернике может вычисляться вплоть до 6-го порядка.
Следует также отметить, что полиномы Цернике определяются только на единичном круге. Поэтому перед началом вычислений координаты точек измерений (xk, yk) должны быть нормализованы:

В уравнении (13) через R обозначен радиус круга Цернике, т.е. круга, на котором производятся вычисления, а через Хk или Yk - координаты, нормализованные к кругу Цернике.
Радиус R круга Цернике применительно к глазу соответствует радиусу зрачка, и сначала должна иметься возможность его свободного выбора. Радиус может подбираться, особенно в случае использования лазера, в соответствии с оптической зоной, которая является целевой для аберрометрического анализа. Все световые точки, которые лежат вне зрачка, соответствующего кругу Цернике с радиусом R, обычно не включаются в вычисления. Поэтому для целей решения систем уравнений допустимо использовать только такие точки измерений, для которых выполняется следующее условие:

Результирующий вектор C, введенный в уравнении (11) и имеющий коэффициенты C1, … Сn, также справедлив только для круга Цернике (единичного круга). Теперь, чтобы определить реальный волновой фронт, нормализованная аберрация волнового фронта должна быть линейно масштабирована к радиусу зрачка. Наконец, для представления результатов целесообразно также указать коэффициенты Цернике Сn в микрометрах. В примере, рассмотренном с использованием уравнений (1)-(7), коэффициенты Цернике были выражены в миллиметрах.
Из коэффициентов Цернике можно непосредственно определить сферический и цилиндрический компоненты преломления исследуемого глаза:

Условия, указанные в выражении (18), зависят от диапазона значений арктангенса в компиляторе, используемом при разработке компьютерной программы, предназначенной для решения системы уравнений. Для компиляторов, используемых в рассматриваемом случае, выполняется соотношение: -90°≤arctg≤+90°.
Чтобы завершить обсуждение разложения суммы, введенной в уравнении (8), посредством полиномов Цернике, далее будет рассмотрено использование полиномов Цернике применительно к длине глаза (OL).
Полиномы Цернике были первоначально определены для цилиндрических координат (r, ϕ) в плоскости проекции для точек пересечения с оптической осью, а именно:

В уравнении (19) для величин


В связи с этим для переменных справедливо:
0≤N≤∞ и
0≤m≤n.
В Таблице 1 полиномы Цернике, выраженные в полярных координатах (r, ϕ), приводятся вплоть до 8-го порядка (n=8) включительно, что соответствует первым 45 полиномам (N=0, 1, 2, … 44), полученным путем алгебраического анализа уравнений (19) и (20).
В Таблице 1 (четвертый столбец) и в Таблице 4 (второй столбец) приведены значения подкоренного выражения в уравнении (19), предшествующие фактическим значениям полинома, обозначенные символом F. В Таблице 4 полиномы Цернике приводятся для прямоугольных координат (x, y).
Для анализа второго паттерна 118 точек, зарегистрированного регистрирующим устройством 60, необходимо преобразовать полиномы Цернике к прямоугольным координатам x и y, заданным в плоскости проекции (второй плоскости 54). Преобразование полярных координат (r, ϕ) (использованных в Таблице 1) в прямоугольные координаты (x, y) осуществляется по следующим известным правилам:

Сложные тригонометрические члены, появляющиеся в процессе преобразования данных из Таблицы 1 в результате возведения в степень полярных координат r, могут быть упрощены применением формул суммирования для тригонометрических функций, приведенных в Таблице 2. Степенные члены тригонометрических функций, появляющиеся в результате упрощения, могут быть затем преобразованы в прямоугольные координаты, и в результате могут быть рассчитаны алгебраическим методом полиномы Цернике, приведенные в Таблице 4 и выраженные в прямоугольных координатах (x, y).
Таким образом, в Таблице 4 представлены результаты преобразований первых 45 полиномов Цернике из Таблицы 1 в полиномы Цернике, выраженные в прямоугольных координатах.
Наконец, в Таблицах 5 и 6 приведены первые частные производные полиномов Цернике по координатам x и y (т.е. функции ∂W/∂x и ∂W/∂y), которые были вычислены алгебраическим методом по полиномам Цернике, приведенным в Таблице 4.
Для решения системы уравнений (11) в конечном итоге необходимы именно приведенные в Таблицах 5 и 6 частные производные полиномов Цернике, полученные на основе измерений смещений индивидуальных световых точек и последующего определения аберраций волнового фронта.
Поскольку выше были описаны математические основы для реконструирования уточненных аберраций волнового фронта, далее, со ссылками на фиг. 9-13, будет показана возможность расчета, на основе реального волнового фронта 102 (см. фиг. 6), построенного по этим данным и формируемого оптической системой глаза, а также, где это требуется, дополнительных данных измерений глаза:
- улучшенной индивидуализированной модели 200 глаза (см. фиг. 9, 10 и 11),
- улучшенного, на основе указанной улучшенной индивидуализированной модели 200 глаза (см. фиг. 11), профиля 224 абляции для коррекции (посредством лазерной рефракционной хирургии) передней поверхности 220 роговицы глаза (см. фиг. 12) и
- улучшенной, на основе указанной улучшенной индивидуализированной модели 200 глаза (см. фиг. 11), конструкции интраокулярной линзы (ИОЛ) 230 или улучшенной передней поверхности 232 этой линзы, подлежащей хирургической имплантации в глаз с целью коррекции ошибок изображения оптической системы оперируемого глаза (см. фиг. 13).
В некоторых вариантах дополнительные данные могут быть получены, например, по данным топографии передней 174 поверхности роговицы и задней поверхности 176 роговицы, а также по биометрическим данным, относящимся к глазу, включая толщину 192 роговицы (СТ), глубину 194 передней камеры (ACD), толщину 196 хрусталика (LT) и длину (OL) 198 глаза - см. по всем этим параметрам фиг. 9.
На фиг. 9 подлежащие измерению параметры проиллюстрированы на схематичной модели 200 глаза. В качестве исходной базы для расчетов выбрана осесимметричная модель глаза. Для этой цели можно использовать, например, модель 140 глаза по Гульстранду (см. фиг. 4) или модель 150 глаза по Лиу и Бреннану (см. фиг. 5). При разработке модели глаза на этой стадии целесообразно выбрать именно осесимметричную модель, поскольку точное положение поверхности роговицы, по существу, не может быть определено посредством измерений. Кроме того, посредством прямых измерений не могут быть определены и другие интраокулярные параметры, такие как форма, характер зависимости и распределение показателя преломления хрусталика. Тем не менее, они могут быть рассчитаны численным методом на основе измерений волнового фронта глаза в целом. Для этой цели на первом этапе средние значения для данных, относящихся к хрусталику (его передней и задней поверхностям, показателю преломления и его распределению), найденные в литературе, вводят в осесимметричную модель глаза, выбранную в качестве исходной.
Оптических расчеты с использованием модели глаза основаны на возможности численного отслеживания световых пучков методом построения хода лучей. В процессе такого построения вычисляется оптическая траектория световых пучков, проходящих внутри глаза, с использованием известного закона преломления Снеллиуса (Снелла). Зависимость показателя преломления от длины волны учитывается в этом случае путем соответствующего выбора показателей преломления для различных оптических сред, используемых в модели глаза.
Для того чтобы моделируемый волновой фронт для разрабатываемой индивидуализированной улучшенной модели глаза стал идентичным реальному волновому фронту 102 (см. фиг. 6 и 9), измеренному применительно к данному глазу, с помощью итеративного алгоритма оптимизации производится адаптация формы хрусталика 180. Согласно данному алгоритму адаптируют переднюю поверхность 182 хрусталика 180 или его заднюю поверхность 184; альтернативно, в случае взвешенной оптимизации адаптируют обе его поверхности 182 и 184.
Алгоритм оптимизации следует использовать в итеративном режиме, поскольку, чтобы запустить данный алгоритм, необходимо знать точки пересечения отслеживаемых световых пучков с оптимизируемыми поверхностями 182 и 184, несмотря на то, что поверхности 182 и 184 пока являются неизвестными. По этой причине для осуществления итерационного расчета хрусталик сначала моделировался с использованием средних значений параметров модели глаза, взятых из литературы. Так, поверхность хрусталика, которая еще не оптимизирована в рамках данного способа, имела форму согласно ссылкам в литературе для начальной базовой модели глаза.
Цель оптимизации параметров глаза состоит в том, чтобы адаптировать преломляющую поверхность таким образом, чтобы волновой фронт, определенный перед оптимизируемой поверхностью, мог быть преобразован, с учетом преломления на этой поверхности, в волновой фронт, определенный за данной поверхностью. По аналогии с принципом, используемым в датчике волнового фронта Хартмана-Шека, принимается, что волновой фронт, измеренный перед входным зрачком, схож с волновым фронтом на выходе из глаза, начинающимся из идеальной фокальной точки 189 на модели сетчатки (обозначенной, как 210 и 188 на фиг. 10 и 9 соответственно) - см. фиг. 10. В случае оптимизации передней стороны 232 хрусталика (на фиг. 9 обозначена, как 182), проиллюстрированном на фиг. 10, волновой фронт 102, измеренный перед глазом, прослеживают при его прохождении "внутрь глаза" через переднюю и заднюю поверхности 202, 204 роговицы, чтобы рассчитать интраокулярный волновой фронт 234 непосредственно перед передней стороной 232 хрусталика (см. часть фиг. 10 слева от передней стороны 232 хрусталика). С другой стороны, производится построение хода лучей "из глаза", в обратном направлении, от идеальной фокальной точки 189 на сетчатки модели 210 через заднюю сторону 237 хрусталика с целью рассчитать точки прохождения световых пучков через переднюю сторону 232 хрусталика (см. часть фиг. 10 справа от передней стороны 232 хрусталика). Затем, используя закон преломления Снеллиуса, можно рассчитать углы наклона передней стороны 232 хрусталика. В завершение может быть определена форма передней стороны 232 хрусталика посредством выведенной для этой цели функции, которая адаптирована к рассчитанным углам наклона. Как уже упоминалось, способ в целом должен осуществляться в итеративном режиме. Данный способ применяется к построению как хода лучей через роговицу "внутрь глаза", так и хода лучей из сетчатки, т.е. "из глаза". Возможно, что решение с использованием алгоритма оптимизации окажется нестандартным, поскольку идентичная ошибка волнового фронта вследствие внесенных изменений может вызываться другими поверхностями модели глаза. Однако ожидается, что этот эффект приведет к различиям только для так называемого внеосевого анализа модели глаза (т.е. для лучей, не распространяющихся параллельно оптической оси), тогда как применительно к фовеальному зрению ожидается, что отслеживание хода лучей даст взаимно согласованные результаты.
В результате двух итеративных оптимизаций, проиллюстрированных на фиг. 10, по завершении адаптации передней стороны 232 хрусталика будет получена индивидуализированная улучшенная модель 200 глаза пациента. Пример данной модели, полученной описанным способом, представлен на фиг. 11. На фиг. 11 показан пучок 212 световых лучей, исходящий из модели 210 сетчатки в исходном направлении 216, который отслеживается, с помощью программы построения хода лучей, через всю оптическую систему модели 200 глаза, образованную адаптированной задней стороной 208 хрусталика, адаптированной передней стороной 206 хрусталика, задней поверхностью 204 роговицы и передней поверхностью 202 роговицы, с генерированием волнового фронта 218, сформированного перед глазом пучком лучей, выходящих из глаза.
Созданная улучшенная индивидуализированная (специфичная для глаза) модель 200 глаза пациента может быть использована для различных приложений, связанных с планированием лечения, включая планирование или предварительный расчет оптимизированного профиля абляции для передней поверхности роговицы (см. фиг. 12) с расчетом формы интраокулярной линзы (ИОЛ, см. фиг. 13), подлежащей введению в глаз, или с комбинацией этих двух планируемых форм лечения. Индивидуализированная модель 200 глаза была разработана таким образом, чтобы волновой фронт 218, генерируемый моделью 200 глаза, совпадал с волновым фронтом 102 (см. фиг. 6), измеренным применительно к глазу посредством аберрометра 10, так что улучшенная модель 200 глаза автоматически включает в себя ошибки изображения или аберрации глаза пациента, в том числе аберрации высших порядков. Описанные алгоритмы оптимизации могут выполняться итеративно, причем они основаны на модели глаза, которая использует фактическую длину глаза в качестве его модельной длины. Фактическая длина глаза может использоваться также при последующих адаптациях и оптимизациях.
Чтобы рассчитать профиль лазерной абляции для передней поверхности роговицы, используется разработанная улучшенная индивидуализированная модель 200 глаза (см. фиг. 11) с целью определить оптимальную форму передней поверхности роговицы при желательном оптическом качестве. Этот расчет выполняется в виде двух следующих этапов:
этап 1: построение трехмерного хода лучей, начиная от модели 210 сетчатки вплоть до роговицы;
этап 2: итеративный расчет идеальной формы передней поверхности роговицы 222 (см. верхнюю часть фиг. 12).
Расчеты на этапе 2 также должны проводиться итеративным методом, поскольку точки прохождения пучков через подлежащую расчету сторону 222 сначала неизвестны.
Затем получают улучшенный профиль 224 абляции (см. нижнюю часть фиг. 12) по отклонению или расхождению между топографией передней поверхности 220 роговицы улучшенной, индивидуализированной модели 200 глаза и вычисленной идеальной формой передней поверхности роговицы 222 (см. фиг. 12). Улучшенные профили 224 абляции, полученные описанным способом, обеспечивают более точную характеристику дефектного зрения, включающую аберрации высших порядков.
В завершение, со ссылкой на фиг. 13, будет описан способ расчета улучшенной конструкции имплантируемой в глаз интраокулярной линзы (ИОЛ) 230.
В процессе расчета улучшенной конструкции интраокулярной линзы 230 не основная, но возможная в будущем цель состоит в корректировании аберраций высших порядков; данная цель относится к оптимизации улучшенного профиля 224 абляции для коррекции преломления применительно к передней поверхности роговицы. Поэтому для оптимизации ИОЛ 230 можно использовать также модели глаза с более низкими требованиями в отношении индивидуализации.
По контрасту с оптимизацией передней поверхности роговицы, описанной на основе фиг. 10 и 11, интраокулярная поверхность может быть оптимизирована аналогично тому, как это было описано, со ссылкой на фиг. 10, применительно к индивидуализации модели 200 глаза - см. в этой связи фиг. 13. Сначала, с целью генерирования желательного волнового фронта глаза в целом (причем этот волновой фронт может быть плоским целевым волновым фронтом 238 или целевым волновым фронтом 240 со свойствами мультифокальности, т.е. обусловленным также аберрациями высших порядков), строится ход лучей для световых пучков, выходящих "из глаза", от идеальной точки 189 проекции на модели 210 сетчатки, через переднюю и заднюю поверхности 202, 204 роговицы модели 200 глаза, причем в данном случае интраокулярный волновой фронт 234 рассчитывается непосредственно перед передней стороной 232 линзы, подлежащей оптимизации (см. фиг. 13).
Затем осуществляется оптимизация передней стороны линзы (снова в итеративном режиме) путем построения хода лучей, начиная от идеальной точки 189 проекции на модели 210 сетчатки. В процессе этого построения производится адаптация передней стороны 232 конструируемой интраокулярной линзы 230 с конечной целью сгенерировать наилучшим возможным образом волновой фронт 234 перед улучшенной передней стороной 232 хрусталика.



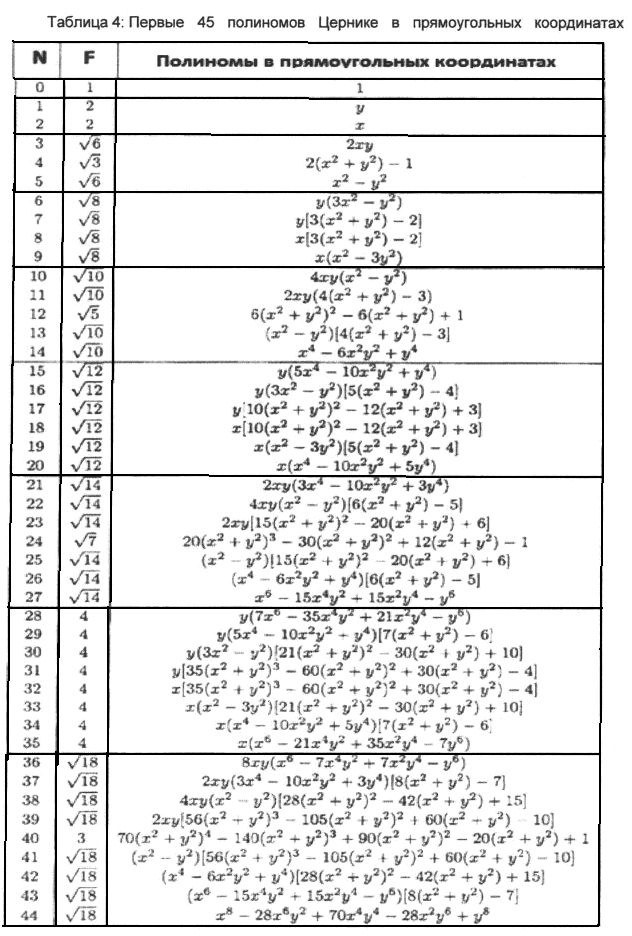


Список обозначений
Реферат
Предложена группа изобретений, относящаяся к медицине, а именно к офтальмологии, и включающая способ и устройство для определения оптических аберраций глаза, оптическая система которого содержит роговицу и хрусталик. Способ включает реконструирование аберраций волнового фронта глаза как отклонений волнового фронта, определяемых с использованием оптической системы глаза и метода аберрометрии, от идеального планарного волнового фронта, генерируемого безаберрационной моделью глаза. При построении безаберрационной модели глаза используется измеренная осевая длина глаза. Группа изобретений позволяет более точно рассчитать и оценить дефекты зрения, включая аберрации высших порядков, а также получить оптимизированную индивидуальную модель глаза и оптимизированный профиль абляции для лазерно-хирургической коррекции преломления роговицы и/или произвести расчет интраокулярной линзы в отношении ее формы и материала. 2 н. и 12 з.п. ф-лы, 6 табл., 13 ил.
Формула
измерение длины указанного глаза (12) с получением измеренной осевой длины (198, OL) глаза;
определение, посредством аберрометрии, аберраций (100) волнового фронта глаза (12) как отклонений волнового фронта (102), формируемого оптической системой (30) глаза (12), от волнового фронта (104), генерируемого безаберрационной моделью глаза, использующей в качестве модельной осевой длины глаза измеренную осевую длину (198, OL) глаза.
проецирование конфигурации (26) множества составляющих пучков (22) через оптическую систему (30) глаза (12) с целью получить на сетчатке (40) глаза первый паттерн (116) точек;
прием второго паттерна (118) точек в виде множества вторых проекций (119), полученных проецированием первого паттерна (116) точек на вторую плоскость (54), и
сравнение вторых проекций (119) с множеством моделей проекций, генерируемых безаберрационной моделью глаза.
(a) формирование из параллельного пучка (16) световых лучей множества индивидуальных составляющих пучков (22; 22-1, … 22-5), образующих двумерную конфигурацию (26);
(b) проецирование конфигурации (26) составляющих пучков (22) через оптическую систему (30) глаза (12) с целью получить из первых проекций (117) составляющих пучков (22; 22-1, … 22-5) первый паттерн (116) точек на сетчатке (40) глаза;
(c) офтальмоскопическое проецирование первого паттерна (116) точек на вторую плоскость (54), находящуюся вне глаза (12), с целью получить из вторых проекций (119) первых проекций (117) второй паттерн (118) точек;
(d) регистрацию второго паттерна (118) точек на второй плоскости (54);
(f) измерение, для каждой второй проекции (119), смещения (124) офтальмоскопической проекции (119) составляющего пучка во втором паттерне (118) точек относительно проекции (132) того же составляющего пучка (22) двумерной конфигурации (26), генерируемой сконструированной моделью глаза.
представление волнового фронта (102), генерируемого оптической системой (30) глаза (12), как суммы полиномов Цернике, нормализованных к единичному кругу и взвешенных с использованием соответствующих коэффициентов для разложения по полиномам Цернике; и
определение аберраций волновых фронтов путем определения указанных коэффициентов.
расчет сферического и цилиндрического компонентов преломления глаза (12), а также угла астигматизма глаза (12) по полиномиальным коэффициентам Цернике для третьего, четвертого и пятого полиномов Цернике второго порядка и радиусу (187) зрачка (186) глаза (12).
разработку модели (200) глаза, специфичной для конкретного глаза, используя найденные аберрации волнового фронта.
(1) толщину (192, СТ) роговицы, глубину (194, ACD) передней камеры, толщину (196, LT) хрусталика и действительную осевую длину (198, OL) глаза (12), определяемые в каждом случае из результатов измерений глаза (12),
(2) топографию передней поверхности (174) роговицы и топографию задней поверхности (176) роговицы, определяемые в каждом случае из результатов измерений глаза (12),
(3) переднюю и заднюю стороны (182, 184) хрусталика, определяемые в каждом случае путем итерационного расчета с использованием метода построения хода оптических лучей и указанных составляющих (1) и (2).
расчет профиля (224) абляции для лазерно-хирургической коррекции преломления согласно указанной индивидуальной модели (200) глаза.
расчет передней стороны (232) интраокулярной линзы (230) в соответствии с указанной индивидуальной моделью (200) глаза.
аберрометр (10) для измерения оптических аберраций (100) глаза (12), выполненный с возможностью:
формирования из параллельного пучка (16) световых лучей множества составляющих пучков (22; 22-1, … 22-5), образующих двумерную конфигурацию (26),
проецирования конфигурации (26) составляющих пучков (22) через оптическую систему (30) глаза (12) на сетчатку (40) глаза (12) с целью получить из первых проекций (117) составляющих пучков (22; 22-1, … 22-5) первый паттерн (116) точек, и
офтальмоскопического проецирования первого паттерна (116) точек на вторую плоскость (54), находящуюся вне глаза (12), с целью получить из вторых проекций (119) первых проекций (117) второй паттерн (118) точек;
отличающееся тем, что дополнительно содержит:
арифметический блок (98), выполненный с возможностью:
конструирования безаберрационной модели глаза, использующей действительную осевую длину (198, OL) глаза в качестве модельной осевой длины глаза и
реконструкции аберраций (100) волнового фронта глаза (12) как отклонений волнового фронта (102), формируемого оптической системой (30) глаза (12) с помощью аберрометра (10), от планарного волнового фронта (104), генерируемого моделью глаза.
источник (14) оптического излучения для генерирования параллельного пучка (16) световых лучей,
устройство (18) для формирования из светового пучка (16) множества составляющих пучков (22; 22-1, … 22-5), образующих двумерную конфигурацию (26),
линзу (28) аберроскопа, установленную на первой оптической оси (20) для проецирования конфигурации (26) составляющих пучков (22) через оптическую систему (30) глаза (12) с целью получить из первых проекций (117) составляющих пучков (22; 22-1, … 22-5) первый паттерн (116) точек на сетчатке (40) глаза (12),
офтальмоскопическое устройство (50, 80) для офтальмоскопического проецирования первого паттерна (116) точек на вторую плоскость (54), находящуюся вне глаза (12), с целью получить из вторых проекций (119) первых проекций (117) второй паттерн (118) точек, и
измерительное устройство для измерения, для каждой второй проекции (119) составляющего пучка (22), зарегистрированной посредством офтальмоскопического устройства (50), смещения (124) второй проекции (119) во второй плоскости (54) относительно проекции (132) того же составляющего пучка (22) двумерной конфигурации (26), генерируемой сконструированной моделью глаза.
Документы, цитированные в отчёте о поиске
Аберрометр с системой тестирования остроты зрения (варианты), устройство и способ его настройки
Комментарии