Цифровой измеритель коэффициента амплитудной модуляции - RU2768206C2
Код документа: RU2768206C2
Чертежи

Описание
Цифровой измеритель коэффициента амплитудной модуляции относится к области измерительной техники, в частности к средствам измерения параметров модуляции сигналов и может быть использован для измерения модуляции напряжения, времени возбуждения генератора и времени входа напряжения генератора в зону регулирования.
Из уровня техники известно устройство для регистрации амплитудной модуляции напряжения (патент №1553923 на изобретение, МПК G01R 29/06, 1990.03.30), предназначенное для регистрации параметров низкочастотной амплитудной модуляции напряжения источников электрической энергии, например синхронных генераторов. В известном устройстве повышение точности измерения достигается поддерживанием постоянного уровня сигнала на выходе управляемого усилителя, по результатам зарегистрированных значений в пиковых детекторах минимума и максимума. Блок управления устанавливает необходимый коэффициент передачи в зависимости от выходного сигнала блока сравнения. Кроме того, устройство содержит входной блок, блок выделения огибающей, блок индикации, модуль управления.
Однако известное аналоговое устройство для регистрации амплитудной модуляции напряжения не позволяет измерять время возбуждения генератора и время входа напряжения генератора в зону регулирования.
Стремительное развитие цифровых технологий привело к появлению на рынке цифровых средств измерений. В цифровых измерительных приборах измеряемая аналоговая величина преобразуется в дискретную форму в виде кода с последующей обработкой микропроцессорными системами. В настоящее время известны различные цифровые измерители.
Из патента №2248000 на изобретение, МПК G01R 29/06, 2005.03.10, известен цифровой измеритель модуляции, содержащий индикатор, преобразователь аналог-код, преобразователь частота-код, входное устройство и вычислитель. Принцип работы измерителя основан на обработке дискретизированного массива данных при помощи преобразования Гильберта. В известном решении не приводятся измерение пикового значения девиации частоты и глубины амплитудной модуляции в заданной полосе частот, реализация измерения среднеквадратического значения девиации частоты и глубины амплитудной модуляции в заданной полосе частот, реализация измерения частоты и коэффициента нелинейных искажений модулирующего сигнала.
Данная задача решена в патенте №2424534 на изобретение, МПК G01R 29/06, 2011.07.20. Принимаем его в качестве прототипа. Известный из данного патента цифровой измеритель содержит индикатор, преобразователь аналог-код, входное устройство и микроконтроллер. Причем выход входного устройства соединен с первым входом преобразователя аналог-код, выход которого соединен с первым входом микроконтроллера, первый выход микроконтроллера соединен с индикатором, второй выход соединен со вторым входом преобразователя аналог-код, а третий выход - со вторым входом входного устройства.
Принцип работы известного измерителя основан на обработке дискретизированного массива данных при помощи преобразований Фурье и Гильберта, за счет усложнения алгоритма цифровой обработки исключена необходимость использования преобразователя частота-код.
Известный цифровой измеритель модуляции может измерять: глубину AM - пиковое значение в заданной полосе частот; девиацию частоты - пиковое значение в заданной полосе частот; глубину AM - среднеквадратическое значение в заданной полосе частот; девиацию частоты среднеквадратическое значение в заданной полосе частот; частоту несущей (центральную частоту); частоту модулирующего сигнала AM и (или) ЧМ; коэффициент нелинейных искажений модулирующего сигнала AM и (или) ЧМ.
Однако известный цифровой измеритель модуляции не имеет схемы и алгоритмов, позволяющих определять время возбуждения генератора и время входа напряжения генератора в зону регулирования.
Задачей предлагаемого изобретения является создание цифрового измерителя с расширенными функциональными возможностями, позволяющего дополнительно определять время возбуждения генератора и время входа напряжения генератора в зону регулирования с повышением точности измерения данных параметров.
Технический результат - расширение функциональных возможностей с повышением точности измерения.
Поставленная задача достигается тем, что в цифровой измеритель коэффициента амплитудной модуляции, содержащий индикатор, преобразователь аналог-код, входное устройство, микроконтроллер, первый вход которого соединен с выходом преобразователя аналог-код, первый выход микроконтроллера соединен с индикатором, второй выход микроконтроллера соединен со вторым входом преобразователя аналог-код, а третий выход микроконтроллера соединен со вторым входом входного устройства, дополнительно введены преобразователь высокого напряжения в низковольтное с гальванической развязкой и аналоговый фильтр низких частот, причем вход понижающего преобразователя напряжения с гальванической развязкой является входом измерителя, а выход соединен с первым входом входного устройства, вход аналогового фильтра низких частот соединен с выходом входного устройства, а выход соединен с первым входом преобразователя аналог-код. Кроме этого в цифровой измеритель коэффициента амплитудной модуляции дополнительно введен блок управления, выходы которого соединены: первый - со вторым входом микроконтроллера, а второй - с третьим входом входного устройства.
Понижающий преобразователь напряжения с гальванической развязкой позволяет сформировать необходимую гибкость применения оборудования, обеспечивая возможность подключения цифрового измерителя коэффициента амплитудной модуляции непосредственно к генератору, для контроля коэффициента амплитудной модуляции и/или времени возбуждения генератора и времени входа генератора в зону регулирования без применения дополнительного оборудования.
Аналоговый фильтр низких частот пропускает низкие частоты и подавляет высокие частоты, что позволяет повысить точность измерения при наличии различных возмущающих воздействий.
Входное устройство по сигналу блока управления и микроконтроллера понижает переменное напряжение, поступающее на его вход до определенного диапазона, зависящего от режима работы устройства и номинальных параметров измеряемого генератора.
Блок управления включает в себя переключатели, предназначенные для управления режимами работы. Блок управления позволяет осуществлять выбор следующих режимов работы:
AM - измерение коэффициента амплитудной модуляции напряжения;
U - измерение среднеквадратического значения напряжения;
F - измерение частоты переменного напряжения;
tB - измерение времени возбуждения генератора;
tH - измерение времени входа напряжения генератора в зону регулирования.
Реализация дополнительных функций цифрового измерителя коэффициента амплитудной модуляции напряжения осуществляется, в том числе, и за счет специального алгоритма работы микроконтроллера, который обрабатывает входные данные, рассчитывает необходимые параметры и выводит в цифровом виде на индикатор.
Выбор работы устройства и номинальных параметров измеряемого источника переменного напряжения, например, генератора, осуществляется с помощью блока управления.
Предлагаемый цифровой измеритель коэффициента амплитудной модуляции сочетает в себе возможности нескольких приборов и позволяет с высокой точностью, дополнительно измерять время возбуждения генератора и время входа напряжения генератора в зону регулирования.
Изобретение поясняется следующими графическими материалами:
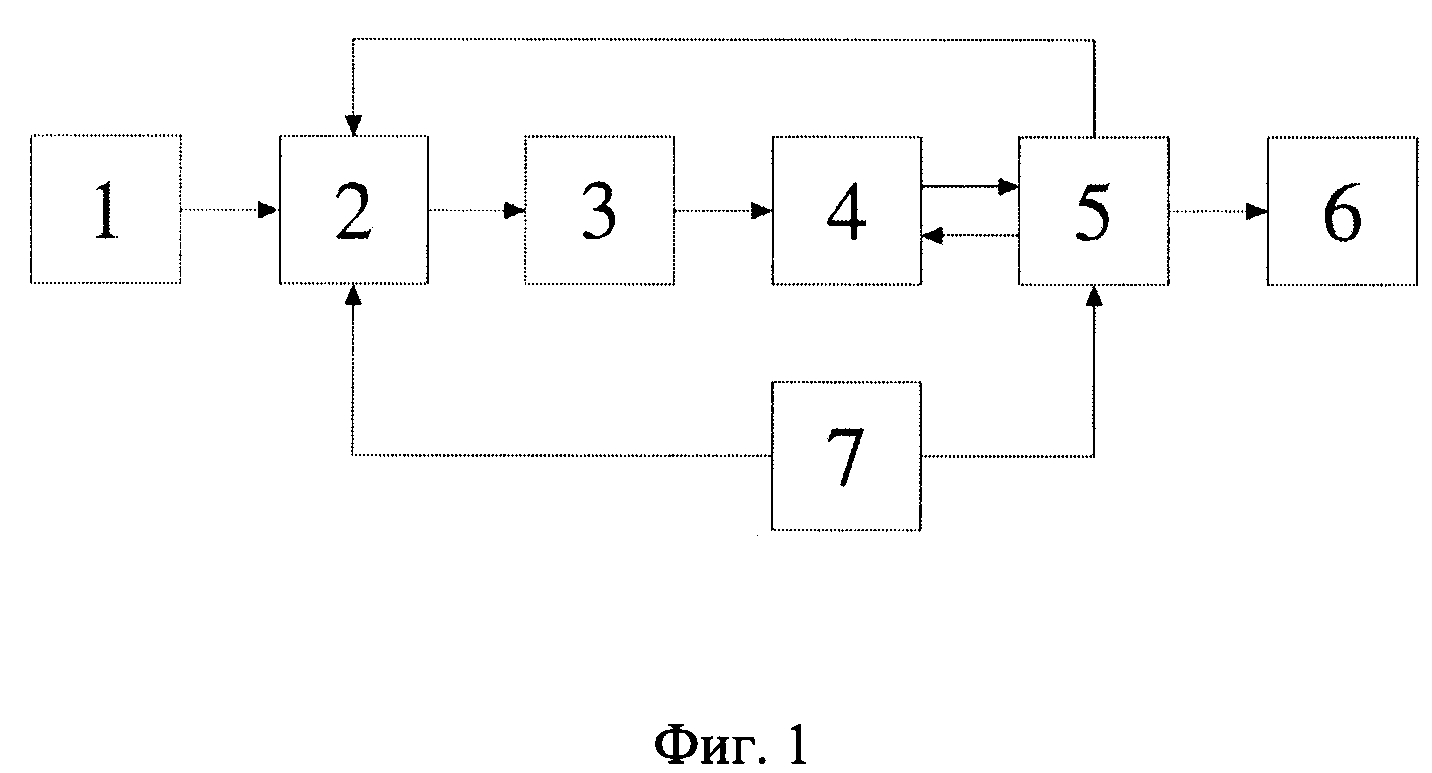
на фиг. 1 представлена структурная схема устройства;
на фиг. 2 представлен график модулированного напряжения, поясняющий режим работы при определении коэффициента амплитудной модуляции;
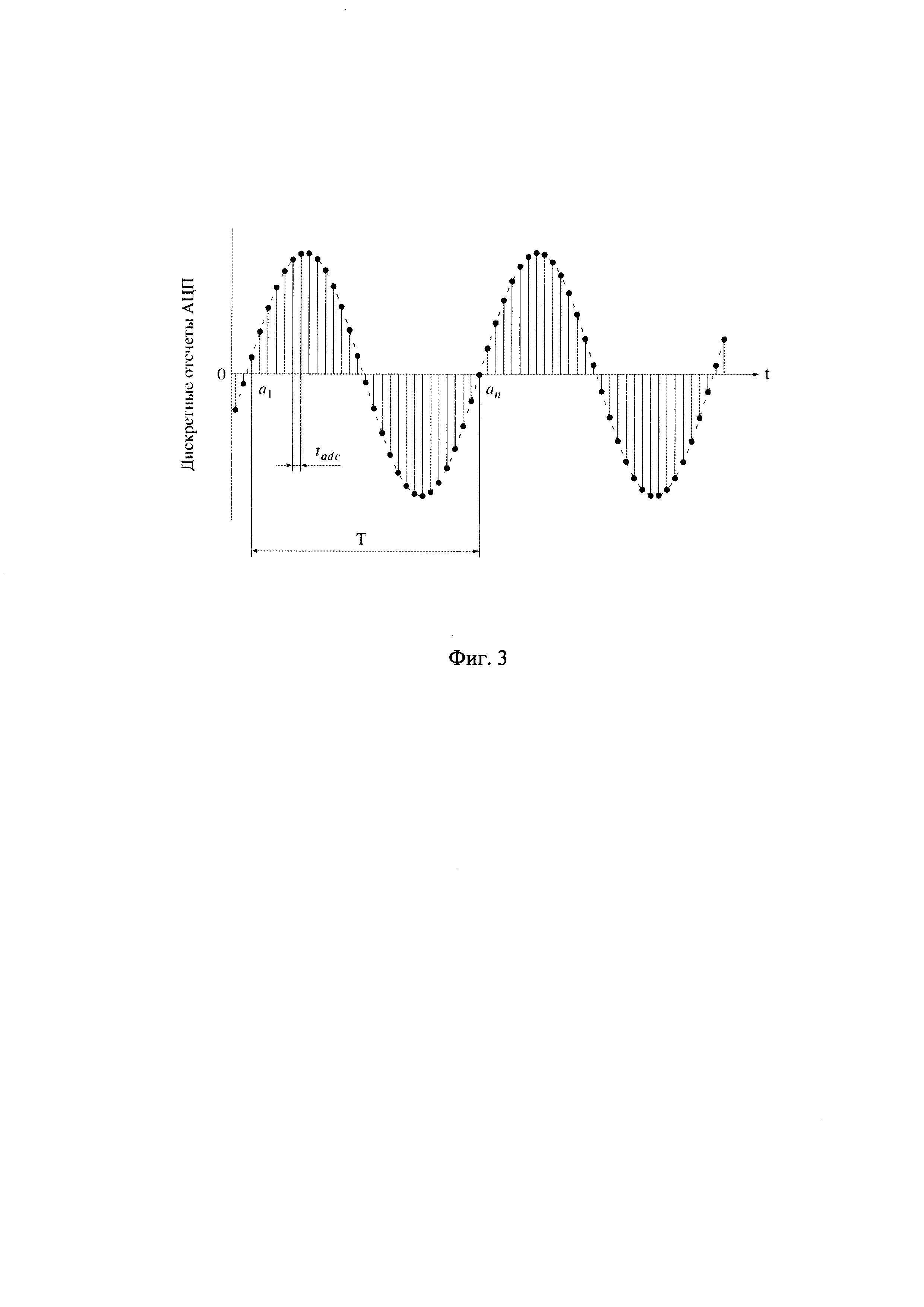
на фиг. 3 представлен график входного дискретного сигнала, поясняющий алгоритм работы при определении частоты;
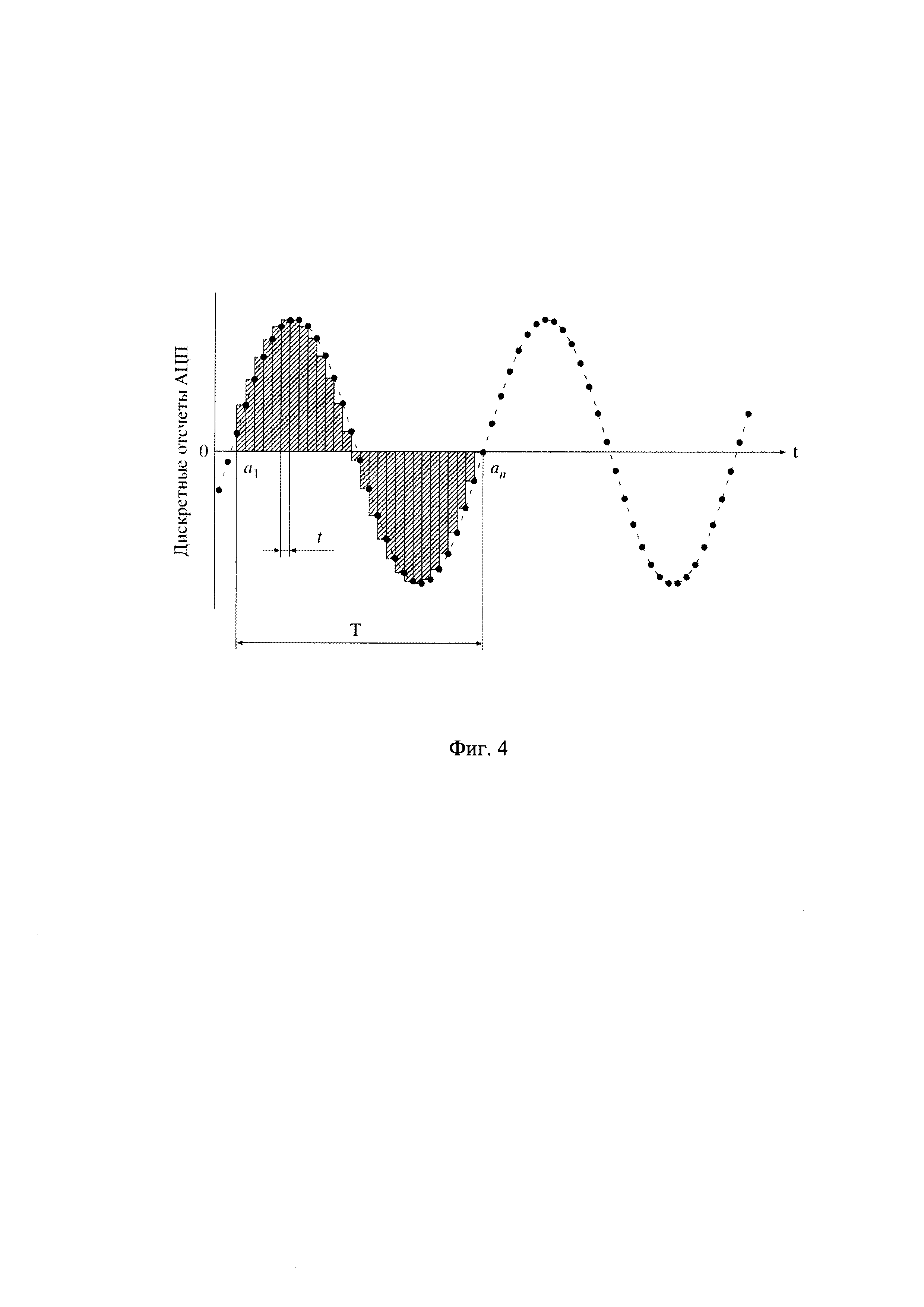
на фиг. 4 представлен график входного дискретного сигнала, поясняющий алгоритм расчета среднеквадратического значения напряжения;
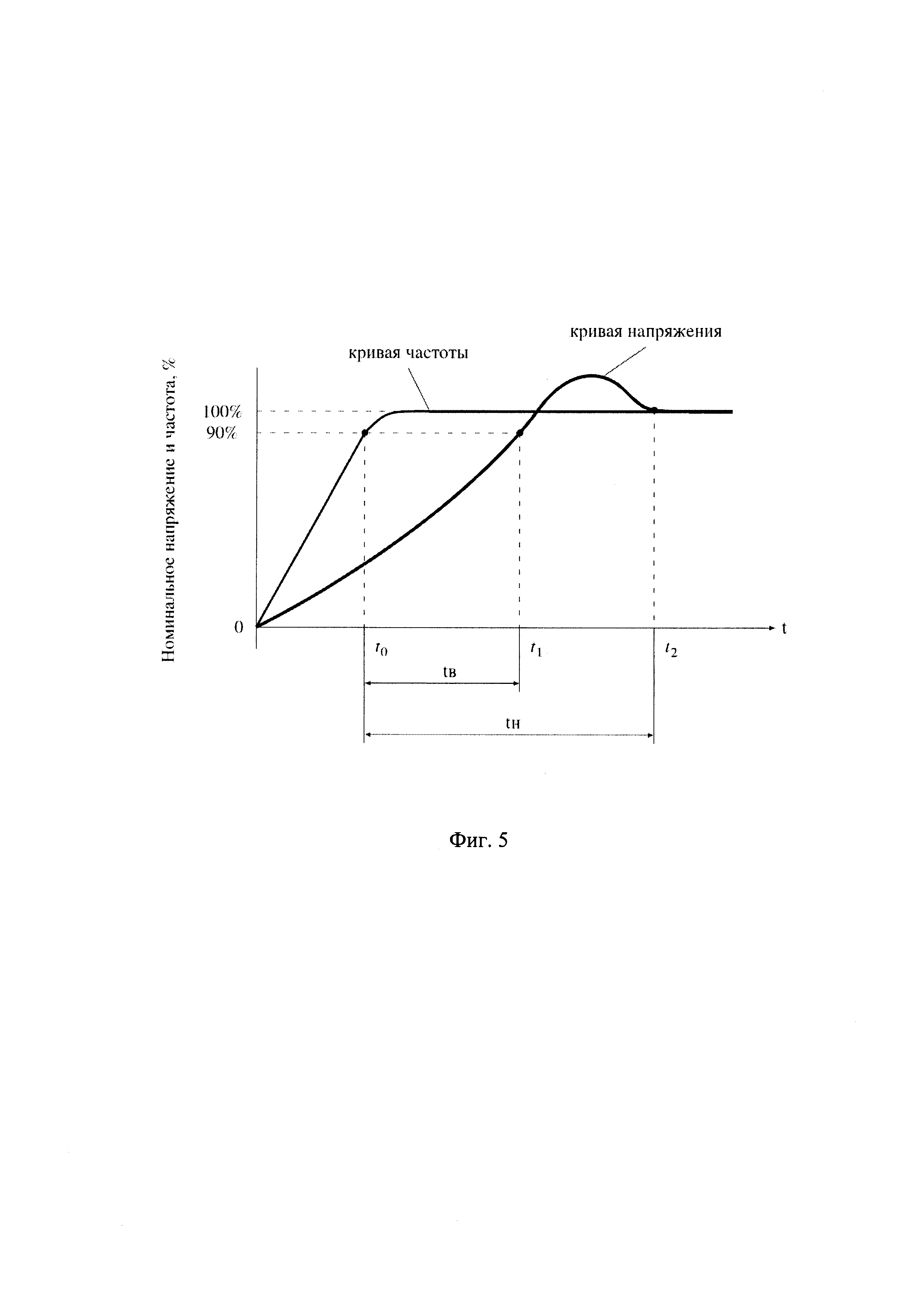
на фиг. 5 представлен график кривых частоты и напряжения при запуске генератора.
На схеме (фиг. 1) обозначены: понижающий преобразователь напряжения с гальванической развязкой 1, входное устройство 2, аналоговый фильтр низких частот 3, 14-битный аналого-цифровой преобразователь (АЦП) 4 для преобразования аналогового сигнала в цифровой, микроконтроллер 5, индикатор 6 и блок управления 7.
Первый вход микроконтроллера 5 соединен с выходом преобразователя аналог-код 4, первый выход микроконтроллера 5 соединен с индикатором 6. Второй выход микроконтроллера 5 соединен со вторым входом преобразователя аналог-код 4, а третий выход микроконтроллера 5 соединен со вторым входом входного устройства 2.
Вход понижающего преобразователя напряжения с гальванической развязкой 1 является входом измерителя. Выход понижающего преобразователя напряжения с гальванической развязкой 1 соединен с первым входом входного устройства 2.
Вход аналогового фильтра низких частот 3 соединен с входным устройством 2, а выход соединен с первым входом преобразователя аналог-код 4. Кроме этого в известный цифровой измеритель коэффициента амплитудной модуляции дополнительно введен блок управления 7, выходы которого соединены: первый - со вторым входом микроконтроллера 5, а второй - с третьим входом входного устройства 2.
Принцип работы цифрового измерителя коэффициента амплитудной модуляции заключается в следующем:
К входу понижающего преобразователя напряжения с гальванической развязкой 1 подключается источник переменного напряжения, например, генератор, параметры которого необходимо измерить. Понижающий преобразователь напряжения с гальванической развязкой 1 понижает высокое входное напряжение в низковольтное, которое в дальнейшем поступает на вход входного устройства 2. Входное устройство 2 понижает входное напряжение, поступающее на его вход до определенного диапазона, зависящего от режима работы прибора и номинальных параметров, таких как, частота и напряжение источника переменного напряжения. Для этой цели во входном устройстве 2 используются прецизионные линейные делители напряжения, каждый из которых имеет фиксированный коэффициент передачи.
Для выбора необходимого делителя напряжения входное устройство 2 имеет интерфейс управления, состоящий из двух входных линий, одна из которых соединена с блоком управления 7, а другая непосредственно с микроконтроллером 5. Напряжение с выхода входного устройства 2 поступает на вход аналогового фильтра низких частот 3, который подавляет высокочастотные шумы, присутствующие во входном напряжении.
Пройдя через аналоговый фильтр низких частот 3, напряжение поступает на вход 14-битного АЦП 4. АЦП 4 преобразует это напряжение в дискретные значения с постоянной частотой дискретизации. Частота дискретизации задается тактовым сигналом, поступающим на вход АЦП 4 с микроконтроллера 5. Частота дискретизации в процессе работы прибора составляет 50 кГц, что в соответствии с теоремой Котельникова В.А. является достаточным для оцифровки аналоговых сигналов с частотами 50 Гц и 400 Гц. Оцифрованный (дискретный) сигнал поступает с выхода АЦП 4 на вход микроконтроллера 5, где происходит его дальнейшая обработка в зависимости от режима работы устройства.
Для расчета коэффициента амплитудной модуляции напряжения в микроконтроллере 5 реализован следующий алгоритм работы:
Дискретные данные, поступающие с выхода АЦП 4, накапливаются в линейном массиве фиксированного размера X[N]. Когда массив заполняется полностью, его содержимое передается в очередь для последующей обработки, массив X[N] очищается и возобновляется процесс накопления данных, поступающих с АЦП 4. В то время как данные с АЦП 4 накапливаются в массиве X[N], микроконтроллер 5 выполняет обработку тех данных, которые уже находятся в очереди с целью определения коэффициента амплитудной модуляции напряжения.
Временной интервал t для расчета коэффициента амплитудной модуляции Kmod с последующим отображением рассчитанных данных на цифровом индикаторе составляет 500 мс. В течение этого времени производится вычисление амплитудного значения напряжения, поступающего на вход прибора, для каждого периода и одновременный поиск наибольшего Umax и наименьшего Umin среди них (см. фиг. 2). По истечении периода t рассчитывается среднее значение между Umax и Umin по формуле:

где
Unom - номинальное амплитудное значение напряжения на временном интервале t;
Umin - минимальное амплитудное значение напряжения на временном интервале t;
Umax - максимальное амплитудное значение напряжения на временном интервале t.
Эта величина принимается за номинальное амплитудное напряжение источника переменного напряжения, к которому подключен вход прибора. Результирующий расчет выполняется по следующей формуле:

где
Kmod - коэффициент амплитудной модуляции;
Umax - максимальное амплитудное значение напряжения на временном интервале t;
Umin - минимальное амплитудное значение напряжения на временном интервале t;
Unom - номинальлное амплитудное значение напряжения на временном интервале t.
Величина Kmod отображается на цифровом индикаторе цифрового измерителя коэффициента амплитудной модуляции и обновляется каждые 500 мс. Расчет коэффициента амплитудной модуляции Kmod выполняется циклически, пока цифровой измеритель работает в режиме измерения коэффициента амплитудной модуляции напряжения.
Для расчета частоты напряжения, поступающего на вход цифрового измерителя от источника переменного напряжения в микроконтроллере 5 реализован следующий алгоритм:
Дискретные данные, поступающие с выхода АЦП 4 накапливаются в линейном массиве фиксированного размера X[N]. Когда массив заполняется полностью, его содержимое передается в очередь для последующей обработки, массив X[N] очищается и возобновляется процесс накопления данных, поступающих с АЦП 4. В то время как данные с АЦП 4 накапливаются в массиве X[N], микроконтроллер 5 выполняет обработку тех данных, которые уже находятся в очереди с целью определения частоты напряжения, поступающего на вход прибора от источника переменного напряжения.
Для определения частоты переменного напряжения, поступающего на вход цифрового измерителя от источника переменного напряжения, оперируя потоком дискретных данных с выхода АЦП 4 необходимо в этом потоке определить дискретные отсчеты АЦП 4, соответствующие началу периода a1, и окончанию периода an для переменного напряжения (см. фиг. 3) и рассчитать период сигнала по формуле:

где
Т - период сигнала;
n - количество дискретных отсчетов между началом периода a1 и окончанием периода an;
tadc - временной интервал в секундах между соседними дискретными отсчетами, поступающими с выхода АЦП 4.
Зная частоту дискретизации АЦП 4 ƒadc, которая является постоянной величиной и составляет 50 кГц, рассчитывается временной интервал tadc:

где
tadc - временной интервал между соседними отсчетами АЦП;
ƒadc - частота дискретизации АЦП.
Расчет частоты сигнала выполняется по формуле:

где
ƒ - значение частоты сигнала;
Т - период сигнала.
Рассчитанное значение частоты ƒ сохраняется в линейном массиве Y[N] и выполняется аналогичный расчет для следующего периода входного сигнала.
По истечении временного интервала t, равного 500 мс, рассчитывается частота входного переменного напряжения как среднее из частот, накопленных в массиве Y[N]. Полученное значение отображается на индикаторе прибора. Массив Y[N] очищается, и вышеописанный алгоритм повторяется циклически до тех пор, пока прибор работает в режиме определения частоты входного переменного напряжения.
Для расчета среднеквадратического значения переменного напряжения, поступающего на вход прибора от источника переменного напряжения в микроконтроллере реализован следующий алгоритм:
Дискретные данные, поступающие с выхода АЦП 4 накапливаются в линейном массиве фиксированного размера X[N]. Когда массив заполняется полностью, его содержимое передается в очередь для последующей обработки, массив X[N] очищается и возобновляется процесс накопления данных, поступающих с АЦП 4. В то время как данные с АЦП 4 накапливаются в массиве X[N], микроконтроллер 5 выполняет обработку тех данных, которые уже находятся в очереди с целью определения среднеквадратического значения переменного напряжения, поступающего на вход прибора.
Среднеквадратическое значение напряжения рассчитывается по следующей формуле:

где
U - среднеквадратическое значение напряжения;
u(t) - мгновенное значение напряжения;
Т - период измерения.
Среднеквадратическое значение напряжения рассчитывается циклически на временном интервале t=500 мс для каждого периода в дискретном потоке данных, поступающих с АЦП 4. Для этого определяются индексы дискретных отсчетов в потоке данных, соответствующие началу периода - а1 и окончанию периода - an. Определив начало и окончание одного периода подсчитывается количество дискретных отсчетов n, входящих в этот период. После того как определено начало и окончание периода и количество дискретных отсчетов, входящих в него, по формулам (4) и (3) рассчитывается период Т в секундах. Затем выполняется расчет интеграла по формуле:
где
a1 - индекс дискретного отсчета, принятого за зачало периода;
an - индекс дискретного отсчета, принятого за окончание периода;
t - временной интервал между соседними дискретными отсчетами АЦП.
При расчете интеграла дискретные отсчеты АЦП 4 пересчитываются в мгновенные напряжения с учетом коэффициентов передачи понижающего преобразователя с гальванической развязкой и входного устройства.
Рассчитав интеграл и период Т по формуле (6), выполняется расчет среднеквадратического значения напряжения для этого периода. Полученный результат сохраняется в массиве Z[N] и вышеуказанный алгоритм повторяется для следующего периода во входном потоке данных, поступающих с АЦП 4.
По истечении временного интервала t=500 мс рассчитывается среднее значение среди значений, накопленных в массиве Z[N]. Это значение выводится на индикатор прибора.
Цикл расчета среднеквадратического значения напряжения выполняется циклически до тех пор, пока прибор работает в режиме измерения среднеквадратического значения напряжения.
Для расчета времени возбуждения синхронного генератора и времени входа генератора в зону регулирования в микроконтроллере реализован следующий алгоритм:
Дискретные данные, поступающие с выхода АЦП 4, накапливаются в линейном массиве фиксированного размера X[N]. Когда массив заполняется, полностью его содержимое передается в очередь для последующей обработки, массив X[N] очищается и возобновляется процесс накопления данных, поступающих с АЦП 4. В то время как данные с АЦП 4 накапливаются в массиве X[N], микроконтроллер 5 выполняет обработку тех данных, которые уже находятся в очереди для определения времени возбуждения генератора и времени входа напряжения генератора в зону регулирования.
Временем возбуждения генератора tв (см. фиг. 5) является временной интервал от момента t0, когда частота выходного напряжения генератора достигает 90% от номинальной и до момента t1, когда выходное напряжение генератора достигает 90% от номинального.
Временем входа напряжения генератора в зону регулирования tн (см. фиг. 5) является временной интервал от момента t0, когда частота выходного напряжения генератора достигает 90% от номинальной и до момента t2, когда выходное напряжение генератора стабилизируется на уровне номинального напряжения с допускаемым отклонением.
Для расчета времени возбуждения синхронного генератора tв микроконтроллер 5 выполняет расчет частоты входного переменного напряжения для каждого периода по входному потоку дискретных данных с АЦП 4. Алгоритм расчета частоты каждого периода аналогичен алгоритму, по которому рассчитывается частота, когда цифровой измеритель работает в режиме измерения частоты. Рассчитав частоту ƒ соответствующего периода, микроконтроллер 5 проверяет выполнение следующего условия:

где
ƒ - частота периода сигнала;
ƒnom - номинальная частота напряжения синхронного генератора.
Если это условие выполняется, т.е. если частота периода больше или равна 90% от номинальной частоты напряжения генератора, микроконтроллер 5 переходит в состояние подсчета времени возбуждения tв.
В этом состоянии микроконтроллер 5 продолжает расчет частоты для каждого последующего периода в потоке данных с АЦП 4 и расчет количества дискретных отсчетов n, входящих в этот период, а также начинает расчет среднеквадратического значения напряжения U для каждого периода. Расчет среднеквадратического значения напряжения U выполняется по алгоритму, аналогичному алгоритму, когда цифровой измеритель работает в режиме измерения напряжения. Количество отсчетов n накапливается в переменной SUM:
SUM = SUM + n
Они будут использованы в дальнейшем при расчете результирующего времени возбуждения генератора tв.
Рассчитав среднеквадратическое значение напряжения U для периода, микроконтроллер 5 выполняет проверку его значения на соответствие условию:

где
U - среднеквадратическое значение напряжения одного периода;
Unom - номинальное напряжение генератора.
Когда микроконтроллер 5 определяет период, который удовлетворяет данному условию, т.е. среднеквадратическое значение напряжения этого периода больше или равно 90% от номинального напряжения генератора, выполняется расчет времени возбуждения tв. В этот момент времени в переменной SUM содержится общее количество дискретных отсчетов АЦП 4 от момента, когда была определена начальная точка отсчета времени возбуждения t0 (см. фиг. 5) и до момента, когда была определена конечная точка отсчета времени возбуждения t1 (см. фиг. 5). Для расчета времени возбуждения tв используется следующая формула:

где
tв - время возбуждения генератора;
tadc - временной интервал между соседними дискретными отсчетами АЦП. Рассчитывается по формуле (4).
Рассчитанное время tв сохраняется во внутренней памяти микроконтроллера, после чего он переходит в состояние определения времени входа напряжения генератора в зону регулирования.
Для определения времени входа напряжения генератора в зону регулирования необходимо найти период, среднеквадратическое значение напряжения которого удовлетворяет следующему условию:
U=Unom±1%,
где
U - среднеквадратическое значение напряжения периода;
Unom - номинальное напряжение генератора.
Причем среднеквадратические значения следующих за ним периодов в течении 1 секунды также должны удовлетворять этому условию.
Для этого микроконтроллер 5:
1. Рассчитывает среднеквадратическое значение напряжения U следующего периода по входным данным с АЦП.
2. Определяет количество дискретных отсчетов АЦП n в этом периоде.
3. Накапливает общее количество отсчетов АЦП в переменной SUM:
SUM = SUM + n
4. Проверяет выполнение условия:

где
U - среднеквадратическое значение напряжения периода;
Unom - номинальное напряжение генератора.
Если условие (10) выполняется, алгоритм работы микроконтроллера 5 продолжается с пункта 5 с целью определения стабилизации выходного напряжения на уровне номинального значения. Если условие не выполняется, алгоритм работы повторяется с пункта 1.
5. Сбрасывается значение переменной SUMTmp:
SUMTmp=0
6. Сбрасывается значение переменной Time:
Time=0
7. Рассчитывается среднеквадратическое значение напряжения U следующего периода по входным данным с АЦП 4.
8. Определяется количество дискретных отсчетов n, входящих в этот период.
9. Накапливается общее количество дискретных отсчетов АЦП 4 в переменной SUMTmp:
SUMTmp = SUMTmp + n
10. Рассчитывается период T по формуле:

где
tadc - интервал между соседними дискретными отсчетами АЦП 4. Рассчитывается по формуле (4);
n - количество дискретных отсчетов в периоде.
11. В переменной Time подсчитывается общее время с момента обнаружения первого периода, удовлетворяющего условию (10):
Time = Time + Т
12. Проверяется выполнение условия (10).
Если условие (10) выполняется, то работа алгоритма продолжается с пункта 13. В противном случае, к переменной SUM добавляется количество дискретных отсчетов АЦП 4, накопленных в переменной SUMTmp и алгоритм работы продолжается с пункта 1.
13. Проверяется выполнение условия:

Если условие не выполняется, алгоритм работы возобновляется с пункта 7. Если условие выполнено, напряжение генератора считается стабилизированным, а количество дискретных отсчетов, накопленных в переменной SUM, является общим количеством отсчетов АЦП 4 от момента t0 до момента t2 (см. фиг. 5). Расчет времени входа напряжения генератора в зону регулирования выполняется по формуле:
tн=SUM⋅tadc,
где
tн - время входа напряжения генератора в зону регулирования;
tadc - временной интервал между соседними отсчетами АЦП 4;
SUM - общее количество отсчетов АЦП от момента t0 до момента t2 (см. фиг. 5).
Из вышеприведенного описания несложно видеть, что алгоритм функционирования предлагаемого цифрового измерителя коэффициента амплитудной модуляции существенно отличается от алгоритма работы известных устройств, введение дополнительных элементов позволило расширить его функциональные возможности с повышением точности измерения параметров.
Реферат
Изобретение относится к области измерительной техники и может быть использовано для измерения модуляции напряжения, времени возбуждения генератора и времени входа напряжения генератора в зону регулирования. Сущность: цифровой измеритель коэффициента амплитудной модуляции содержит индикатор, преобразователь аналог-код, входное устройство, микроконтроллер, понижающий преобразователь напряжения с гальванической развязкой и аналоговый фильтр низких частот. Первый вход микроконтроллера соединен с выходом преобразователя аналог-код. Первый выход микроконтроллера соединен с индикатором. Второй выход микроконтроллера соединен со вторым входом преобразователя аналог-код. Третий выход микроконтроллера соединен со вторым входом входного устройства. Вход понижающего преобразователя напряжения с гальванической развязкой является входом измерителя, а выход соединен с первым входом входного устройства. Вход аналогового фильтра низких частот соединен с выходом входного устройства, а выход соединен с первым входом преобразователя аналог-код. Введен блок управления, выходы которого соединены: первый - со вторым входом микроконтроллера, а второй - с третьим входом входного устройства. Микроконтроллер содержит алгоритмы, позволяющие измерять время возбуждения генератора и время входа напряжения генератора в зону регулирования. Технический результат: расширение функциональных возможностей с повышением точности измерения. 5 ил.
Комментарии